LECTURE 2 Maxwell’s equations: Electric field Ert Brt Jrt ...dugan/USPAS/Lect2.pdfParticle...
10
Click here to load reader
Transcript of LECTURE 2 Maxwell’s equations: Electric field Ert Brt Jrt ...dugan/USPAS/Lect2.pdfParticle...

11/21/01 USPAS Lecture 2 1
LECTURE 2
Review of basic electrodynamicsMagnetic guide fields used in accelerators
Particle trajectory equations of motion in accelerators
11/21/01 USPAS Lecture 2 2
Review of basic electrodynamicsMaxwell’s equations: Electric field
r rE r t( , ), magnetic field
r rB r t( , ),
charge density ρ( , )rr t , current density
r rJ r t( , )
r r r r
r r
r rr
r rr
r
r rr
r r
∇ • = => • =
∇ • =
∇ × = − ∂∂
=> • = − ∂∂
•
∇ × = + ∂∂
=>
• = +
∫
∫∫
E E daQ
B
EBt
E dlBt
da
B JEt
B dl I
enclosed
S
SC
enclosed
ρε ε
µ µ ε
µ µ ε
0 0
0 0 0
0 0 0
0
Gauss' Law
Faraday' s Law
∂∂
•∫∫r
rEt
daSC
Ampere' s Law
11/21/01 USPAS Lecture 2 3
Electrodynamic potentials: r r rA r t V r t( , ), ( , )
r r r r rr
B A E VAt
= ∇ × = −∇ − ∂∂
Conservation of charge:r r∇ • + ∂
∂=J
tρ
0
Ohm’s Law:r rJ E= σ
Lorentz Force Law: force on charge er r r rF e E v B= + ×( )
The Lorentz force generated by the accelerator’s guide fielddetermines the trajectory of particles in the accelerator. Before we
discuss the trajectory equations, we should make some remarksabout the guide field.
11/21/01 USPAS Lecture 2 4
Magnetic guide fields used in accelerators
The simplest guide field for a circular accelerator is a uniformfield.
B0
e v
Pole
Pole
orbitρ

11/21/01 USPAS Lecture 2 5
The Lorentz force provides the centripetal accelerationv evB
meBmv
Bp
20 0
0
1
10 2998
ρ ρ
ρ
= =
[ ] = [ ][ ]
−
,
.mT
GeV / c1
Using this relation, we sometimes measure momentum in units ofT-m:
Bpρ( )[ ] = [ ]
T - mGeV / c0 2998.
The (Bρ) product is called the magnetic rigidity.
More than a simple uniform bending field is required. Focusingfields are required to insure stability to small displacements from
the orbit.
11/21/01 USPAS Lecture 2 6
In a synchrotron, the guide field (including bending and focusingfields) is achieved by a series of separate magnets.
e
v
B0
B0
B0
B0
bending fields
focusing fields
11/21/01 USPAS Lecture 2 7
The focusing fields may be separate from the bending fields(“separated function” machine) or may be combined with the
bending fields (“combined function” machine).If the bending fields all have the same design value, the machine is
called isomagnetic.
Magnetic focusing fields:Optical analogy: Thin lens, focal length f
θx
f
θ = x
f
11/21/01 USPAS Lecture 2 8
Magnetic lens:
x
f
p
θ ∆p
L
Β
e
This linear dependence of field on position can be generated by aquadrupole magnet
∆ ∆p F t evBLv
eB Ly y= =
=
θ ≈ =∆pp
eB L
py
If BB
xx B xy
y=∂∂
= ′ , then θ ≈ ′ =eB xL
p
x
f
The field acts like a focusing lens offocal length
1f
eB Lp
B LB
≈ ′ = ′( )ρ

11/21/01 USPAS Lecture 2 9
General description of the guide fields in the region of the particlebeam
For typical accelerator magnets, the magnet length is much largerthan the transverse dimensions of the field gap
(L>>G)
x
y
zL
GPole
poleB
The idealized fields extend only over the length L (“effectivelength”) and are independent of z and transverse to the beam.
Idealized fields ignore the fringe fields. (Note that this is does not
11/21/01 USPAS Lecture 2 10
apply to solenoids, and is a poor approximation for wigglers orundulators).
In the region of the beam,
r r∇ × =B 0 so
r rB = −∇ φr r
∇ • =B 0 so ∇ =2 0φ
The magnetic scalar potential is a solution to LaPlace’s equation.For the idealized fields, the magnetic potential is only a function of
x and y.In this case, the general solution to LaPlace’s equation in Cartesian
coordinates
11/21/01 USPAS Lecture 2 11
∂∂
+ ∂∂
=2
2
2
2 0φ φ
x y can be written as
φ( , ) Re ( )x y C x iymm
m= +=
∞∑
0where Cm is a (complex) constant determined by the boundary
conditions.
The vector potential has only one component and it is
A x y iC x iyz mm
m( , ) Re ( )= +
=
∞∑
0
Then
11/21/01 USPAS Lecture 2 12
Bx
mC x iy
By
imC x iy
x mm
m
y mm
m
= −∂∂
= − +
= −∂∂
= − +
=
∞−
=
∞−
∑
∑
φ
φ
Re ( )
Re ( )
1
1
1
1
These can be combined to give
B iB imC x iyy x mm
m+ = − +( )=
∞−∑
1
1.
This is the general multipole expansion for the two-dimensionalmagnetic field in a current-free region.

11/21/01 USPAS Lecture 2 13
Since
− =−( )
∂∂
+ ∂∂
−
−= =
−
−= =
imCm
B
xi
B
xm
my
mx y
mx
mx y
11
1
10
1
10
!
we can write
B iBm
B iB x iyy xm m
m
m+ = + +( )=
∞∑ 1
0 !( ˜ )( ) ( )
where
11/21/01 USPAS Lecture 2 14
B B B B
B BB
xB B
Bx
B BB
xB B
B
x
y
x y
x
x y
y
x y
x
x y
( ) ( )
( ) ( )
( ) ( )
; ˜ ˜ ;
; ˜ ˜˜
; ˜ ˜
00
00
1
0
1
0
22
20
22
20
= =
= ′ =∂∂
= ′= ∂∂
= ′′ =∂∂
= ′′ = ∂∂
= = = =
= = = =
BB
xB
B
xm
my
mx y
mm
xm
x y
( ) ( ); ˜=∂∂
= ∂∂
= = = =0 0
Vector potential in this language:
A x ym
B iB x iyzm m m
m( , ) Re
!( ˜ )( )( ) ( )= − + +− −
=
∞∑ 1 1 1
1
11/21/01 USPAS Lecture 2 15
Let us write out the first few terms:
B B B x B yB
x y B xy
B B B x B yB
x y B xy
y
x
= + ′ − ′ + ′′ − − ′′ +
= + ′ + ′ + ′′ − + ′′ +
02 2
02 2
2
2
˜ ( ) ˜ ...
˜ ˜˜
( ) ...
The terms without the twiddle are called “normal” terms; the termswith the twiddle are called “skew” terms. The 0 coefficients arepure dipole terms, the linear are quadrupole terms, the quadratic
are sextupole terms.
11/21/01 USPAS Lecture 2 16
G
Integration path
Iron
NI
y
x
N
S
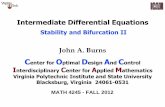
Pure dipole: NI turns/pole

11/21/01 USPAS Lecture 2 17
Evaluate r rH dl Ienclosed• =∫ around the integration path shown.
For infinite permeability iron r
r
HB= →µ
0 inside the iron, so in the
gap
HNIG
B HNIG
BNI
G
= ⇒ = =
= −[ ][ ]
2 2
2 52
0 0µ µ
[ ] .TkA turns
mmThis dipole bends a positive particle moving in the z-direction to
the left.If the dipole is rotated clockwise by 90o about the z-axis, it
becomes a pure skew dipole.
11/21/01 USPAS Lecture 2 18
NS
NS
y
x
NI
R
Integration path
Iron
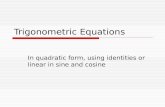
Pure quadrupole, NI turns/pole
11/21/01 USPAS Lecture 2 19
Evaluate r rH dl Ienclosed• =∫ around the integration path shown.
For infinite permeability iron r
r
HB= →µ
0 inside the iron, so in the
gapr rH dl B rdr
B RNI B
NI
R
BNI
R
R• = ′ = ′ = ⇒ ′ =
′ = −[ ][ ]
∫ ∫1
22
2 51
00
2
00 2
2
µ µµ
[ ] .Tm
A turns
mm
Quadrupole focal length fp
eB LBB L
≈′
=′
( )ρ
Note that (for a positive particle moving in the z-direction),this quadrupole is focusing in x, but defocusing in y.
If the quadrupole is rotated clockwise by 45o about the z-axis, itbecomes a pure skew quadrupole.
11/21/01 USPAS Lecture 2 20
R
N
S
N
S
N
S
NI
Integration path
Iron
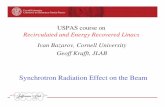
PuresextupoleNI turns/pole

11/21/01 USPAS Lecture 2 21
Evaluate r rH dl Ienclosed• =∫ around the integration path shown.
For infinite permeability iron r
r
HB= →µ
0 inside the iron, so in the
gap
r rH dl
Br dr
B RNI B
NI
R
BNI
R
R• = ′′ = ′′ = ⇒ =
′′ = −[ ][ ]
∫ ∫1
2 66
7540
0
20
3
00 3
3
µ µµ
[ ]Tm
A turns
mm
If the sextupole is rotated clockwise by 30o about the z-axis, itbecomes a pure skew sextupole.
11/21/01 USPAS Lecture 2 22
Iron
y
x
Gradient magnet (for combined function machines): provides botha bending field and a gradient (due to changing gap dimension).
11/21/01 USPAS Lecture 2 23
I
z
x
y
L
N turns
The transverse fringe fields at the solenoid ends are crucial to thesolenoid focusing action, so in this case the idealized fields mustinclude end fields. Maxwell’s equations allow the end fields to
have the form BBz
x BBz
yxz
yz= − ∂
∂= − ∂
∂12
12
Solenoid focal length:
fL
peB L
BBz z
=
= ( )
2 22 2ρ
Solenoid: produces an axialfield
BNILz = µ0
BNI
Lz[ ] .TkA turns
m= × −[ ]
[ ]−1 26 10 3
11/21/01 USPAS Lecture 2 24
Particle trajectory equations of motion in accelerators
Consider a particle of charge e, rest mass m0, momentumr rp m v= 0γ (γ 2
21
1
=−
vc
), moving under the action of the Lorentz
force:
The trajectory equation of motion is given by Newton’s Law:
dpdt
ddt
m v F e E v Br
r r r r r= ( ) = = + ×( )0γ
Solution is this equation is the trajectory rr t( )

11/21/01 USPAS Lecture 2 25
Write rr t( ) in terms of the “reference trajectory”:
e
p
B0
B0
B0
B0
bending fields
focusing fields
0
Referencetrajectory
ρ
The “reference trajectory” rr t0( ) is the trajectory of a “reference
particle” of momentum rp0 that passes through the center of
symmetry of all the idealized magnetic guide fields. The referencetrajectory is an idealization.
11/21/01 USPAS Lecture 2 26
For a circular accelerator, this trajectory is closed (i.e., it repeatsitself exactly on every revolution)
Reference trajectory
rrrr0
δrr
Actual trajectory
r r rr t r t r t( ) ( ) ( )= +0 δ
We want to write the trajectory equation of motion in the “natural”coordinate system of the reference trajectory.
11/21/01 USPAS Lecture 2 27
From differential geometry: “natural” coordinate system of a curvein space
Reference trajectory
rr0
s
tdr
ds=
r0
ˆ ( )ˆ
n sdt
ds= −ρ
ˆ ˆ ˆb t n= × ˆ, ˆ ˆ
ˆ ˆ ˆ
b t n
b t n
and are unit vectors
= = =1
11/21/01 USPAS Lecture 2 28
For any space curve rr s0( ), where s is the arc length along the
curve, the vector tdrds
=r0 is a unit vector tangent to the curve. The
vector dtds
ˆ measures the rate at which the tangent vector changes,
which is inversely proportional to ρ( )s , the radius of curvature:dtds
ns
ˆ ˆ( )
= −ρ
, where n (called the principal normal to the curve) is a
unit vector normal to t . The vectors t , n, and ˆ ˆ ˆb t n= × form anorthogonal, right-handed coordinate system which moves (and may
rotate) as we progress along the space curve.
The change in the unit vectors with s is given by the

11/21/01 USPAS Lecture 2 29
Frenet-Serret relations:dtds
n dnds
bt db
dsn
ˆ ˆ
ˆ ˆ ˆ
ˆˆ= − = + = −
ρτ
ρτ
where τ(s) is called the torsion.
For most accelerators, the reference orbit lies in a plane: thiscorresponds to τ(s)=0. For circular accelerators, since the orbit is
closed,ds
sdds
dsρ
θ π( )
= =∫∫ 2
Take the space curve to be the reference trajectory, and write thetrajectory equations using the Frenet-Serret co-ordinate system:
r r r rr r r r xn yb= + = + +0 0δ ˆ ˆ
11/21/01 USPAS Lecture 2 30
(δrr lies in x-y plane since coordinate system moves with the
particle)
rr r r
vdrdt
drdt
xn xdndt
yb sdrds
xn xsdnds
yb
st xnx
st yb stx
xn yb
= = + + + = + + +
= + + + = +
+ +
0 0
1
˙ ˆˆ
˙ ˆ ˙ ˙ ˆ ˙ˆ
˙ ˆ
˙ˆ ˙ ˆ ˙ˆ ˙ ˆ ˙ˆ ˙ ˆ ˙ ˆρ ρ
s
y
x
rr0
δrr
Reference trajectory
Actual trajectory
˙ ˙fdfdt
dsdt
dfds
sdfds
≡ = =
11/21/01 USPAS Lecture 2 31
Newton’s Law: dpdt
ddt
m v F e E v Br
r r r r r= ( ) = = + ×( )0γ
ddt
m vddt
m xnddt
m ybddt
m sx
t
nddt
m xm s x
bddt
m y tddt
m s
0 0 0 0
00
2
0 0
1
1
γ γ γ γρ
γ γρ ρ
γ γ
r[ ] = [ ] + [ ] + +
= [ ] − +
+ [ ] +
˙ ˆ ˙ ˆ ˙ ˆ
ˆ ˙˙ ˆ ˙ ˆ ˙ 11 0+
+
x m xsρ
γρ
˙˙
r rv B
n b t
x y sx
B B B
n yB sx
B b sx
B xB t xB yB
x y s
s y x s y x
× = +
= − +
+ +
−
+ −[ ]
ˆ ˆ ˆ
˙ ˙ ˙
ˆ ˙ ˙ ˆ ˙ ˙ ˆ ˙ ˙
1
1 1
ρ
ρ ρ
11/21/01 USPAS Lecture 2 32
Three trajectory equations:
ddt
m xm s x
yeB sx
eB eE
ddt
m y sx
eB xeB eE
ddt
m sx m xs
s y x
x s y
00
2
0
00
1 1
1
1
γ γρ ρ ρ
γρ
γρ
γρ
˙˙
˙ ˙
˙ ˙ ˙
˙˙˙
˙
[ ] = +
+ − +
+
[ ] = +
− +
+
= − + xxeB yeB eEy x s− +˙
Write derivatives in terms of arc length s along the reference curveas the independent variable:
(with ′ ≡fdfds
)

11/21/01 USPAS Lecture 2 33
dfdt
dfds
s f s= = ′˙ ˙
and introduce l=the path length of the particle along the orbit
ds
dlReferencetrajectory
Trajectory
dldt
vdlds
s l s lvs
= = = ′ ⇒ ′ =˙ ˙ ˙
11/21/01 USPAS Lecture 2 34
vl
dds
mvl
xm v
lx
yvl
eBvl
xeB eE
vl
dds
mvl
yvl
xeB x
vl
eB eE
v
s y x
x s y
′ ′′
=′
+
+ ′′
−′
+
+
′ ′′
=′
+
− ′′
+
′
00
2
0
1 1
1
γ γρ ρ ρ
γρ
lldds
mvl
x m x vl
xvl
eB yvl
eB eEy x s00
21γ
ργρ′
+
= − ′
′
+ ′
′− ′
′+
Divide by vl′
, use p m v= 0γ , and expand LHS:
11/21/01 USPAS Lecture 2 35
pl
x xdds
pl
pl
xy eB
xeB eE
lv
pl
y ydds
pl
xeB x eB eE
lv
x dds
p
s y x
x s y
′′′ + ′
′
=′
+
+ ′ − +
+ ′
′′′ + ′
′
= +
− ′ + ′
+
′
ρ ρ ρ
ρ
ρ
1 1
1
1ll
pl
dds
x pxl
x eB y eB eElvy x s
+′
+
= − ′′
+ ′ − ′ + ′1
ρ ρ
Let the electric field be zero: the particle energy is then constant.
Divide by pl
dds l
l
l′ ′
= − ′′′
and use1
2
11/21/01 USPAS Lecture 2 36
′′ − ′ ′′′
= +
+ ′ ′ − +
′
′′ − ′ ′′′
= ′ +
− ′ ′
+
′′′
− +
= ′ − ′
x xll
xy l
eBp
xl
eB
p
y yll
lx eB
px l
eBp
x ll
dds
x x
s y
x s
11 1
1
1 1
ρ ρ ρ
ρ
ρ ρ ρxx l
eB
py l
eBp
y x′ + ′ ′
From the relation for the velocity,
v s Kx x y sx
x y2 2 2 2 2 22
2 21 1= +( ) + + = +
+ ′ + ′
˙ ˙ ˙ ˙ρ
Solve for s

11/21/01 USPAS Lecture 2 37
˙ ˙
sv
xx y
lvs
xx y=
+
+ ′ + ′
′ = = +
+ ′ + ′
1
12
2 2
22 2
ρ
ρand
Approximation:“paraxial” motion=> the derivatives ′ ′ <<x y2 2 1, so
′ ≈ + ′ ′′′
′ ′′′
lx
xll
yll
1ρ
and we neglect and terms in the trajectory
equations(These neglected terms are called “kinematic terms”)
Typical values of
( ) cos
max
max
x s xs
xdxds
x
≈
′ = ≈ ≈ ≈ −
β
β1010
10 3mmm
11/21/01 USPAS Lecture 2 38
Trajectory equations in the paraxial approximation:
′′ = +
− +
+ ′ +
′′ = +
− ′ +
xx x eB
py
eBp
x
yx eB
px
eBp
x
y s
x s
11 1 1
1 1
2
2
ρ ρ ρ ρ
ρ ρ
′ = +
lx
1ρ