Induction Motors-scalar Control
60
INDUCTION MOTORS-SCALAR CONTROL Considering two pole machine with three phase windings on the stator ROTATING MAGNETIC FIELD-ANALYTICAL METHOD Considering two-pole machine with three phase windings on the stator . R lt t MMF t it i th i d fi d b l θ Resultant MMF wave at any point in theair gap, defined by an angle θ m . The origin of the angle θ m can be chosen to be the axis of phase u. At any instant of time, all three phases contribute to the air gap mmf along the path defined by θ The mmf along θ is 1 defined by θ m . The mmf along θ m is ) ( ) ( ) ( ) ( m w m v m u m F F F F
Transcript of Induction Motors-scalar Control

INDUCTION MOTORS-SCALAR CONTROL
Considering two pole machine with three phase windings on the stator
ROTATING MAGNETIC FIELD-ANALYTICAL METHOD
Considering two-pole machine with three phase windings on the stator.
R lt t MMF t i t i th i d fi d b l θResultant MMF wave at any point in the air gap, defined by an angle θm.The origin of the angle θm can be chosen to be the axis of phase u. At anyinstant of time, all three phases contribute to the air gap mmf along the pathdefined by θ The mmf along θ is
1
defined by θm. The mmf along θm is)()()()( mwmvmum FFFF

INDUCTION MOTORS-SCALAR CONTROLROTATING MAGNETIC FIELD-ANALYTICAL METHOD
2

INDUCTION MOTORS-SCALAR CONTROL
Where N is the effective number of turns in phase U and i is current in phase U
ROTATING MAGNETIC FIELD-ANALYTICAL METHOD
Where N is the effective number of turns in phase U, and iu is current in phase U
Because the phase axes are shifted from each other by 120 electrical degrees
)cos()( mumu iNF
Because the phase axes are shifted from each other by 120 electrical degrees,the contributions from phases V and W are, respectively
)º120cos()( iNF )º120cos()()120cos()(
mwmw
mvmv
iNFiNF
The resultant MMF at point θ is:p
)120cos()120cos()cos(),( ºº mwmvmum tiNtiNtiNtF
Th t i i iThe currents iu, iv, iw, are:
º120cos
cos
tItitIti smu
3
º120cos
120cos tIti
tIti
smw
smv

INDUCTION MOTORS-SCALAR CONTROL
)120cos()º120cos()120cos()º120cos()cos()cos(),( ºº msmmsmmsmm tINtINtINtF
ROTATING MAGNETIC FIELD-ANALYTICAL METHOD
BABABA cos21cos
21coscos
3
In general for a P-pole machine that is 2p poles we have:
)cos(23),( msmm tINtF
In general for a P-pole machine, that is 2p poles, we have:
)cos(23),( msmm ptI
pNtF
gtFtB
gtFtH m
mm
m),(,),(, 0
Resultant mmf wave in the air-gap rotating at the constant angular velocity Ωs
INtFpt 3)(0
pdtdt
p
Ip
tFpt
smsm
mmms 2),(0
4
mprnpf
pf
srad
p
pp
ssss
s ..60302

INDUCTION MOTORS-SCALAR CONTROL
ROTATING MAGNETIC FIELD-ANALYTICAL METHOD
5

INDUCTION MOTORS-SCALAR CONTROL
The speed of the magnetic rotating field is the synchronous speed For a
SYNCHRONOUS SPEED, ASYNCHRONOUS SPEED, AND SLIP SPEED
The speed of the magnetic rotating field is the synchronous speed. For a induction motor with P poles, the synchronous speed is given in r/min as:
fffrev sss 6060120
where, fs is the stator frequency in Hertz, and ns is the synchronous speed in r/min
pf
Pf
Pfn sss
s
2min
r/min.
However, the rotor rotates at a speed slightly slower than the synchronous speed. This difference between speeds is called the slip speed and it is given as:
h i th h i l d i / i f th t d i th li d
msslip nnn
where, nm is the mechanical speed in r/min of the rotor, and ns is the slip speed in r/min. Moreover, the slip speed can also be defined in a per unit system as the slip, s, as given in:
6
s
ms
nnns

INDUCTION MOTORS-SCALAR CONTROLSYNCHRONOUS SPEED, ASYNCHRONOUS SPEED, AND SLIP SPEED
7

INDUCTION MOTORS-SCALAR CONTROL
SYNCHRONOUS SPEED, ASYNCHRONOUS SPEED, AND SLIP SPEED
It also can be expressed as
pnnsm
s
msms
It also can be expressed as
m
d
revnmin
pn
ssss
So:ss
m
fs
rad
2
Frequency of the rotor voltages and currents
smsm snsn 11
Frequency of the rotor voltages and currents
mss
sms
s
ffPPPs
8
srsssmsr fsfsPssPP
222

INDUCTION MOTORS-SCALAR CONTROL
We have seen that the speed of the magnetic rotating field produced by a
SYNCHRONOUS SPEED, ASYNCHRONOUS SPEED, AND SLIP SPEED
We have seen that the speed of the magnetic rotating field produced by a currents of fs, respect to the reference system of the stator (fixed) is:
fn ss
60
ps
On the other hand, the currents of the rotor of frequency sfs produces another rotating magnetic field, which respect to the reference system attached to the g g p yrotor turns at:
ss
sr nsp
fsn 60
With the rotor revolving in the same direction of rotation as the stator field, the rotor currents produce a rotating flux wave rotating at sns with respect to the rotor in the forward direction.
With respect to the stator, the speed of the flux wave produced by the rotor currents (with frequency sfs ) equals:
9
sssms nsnnsnns 1

INDUCTION MOTORS-SCALAR CONTROLTORQUE IN ROTOR
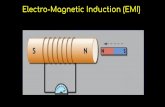
The N-S poles created by the stator sweeps to the right at synchronous speed n The flux per pole is distributed sinusoidally The rotor is also moving to thenS. The flux per pole is distributed sinusoidally. The rotor is also moving to the right at a speed nm
A voltage E=B·l·(s-m ) is induced in each conductor while it is being cut by the mutual flux that crosses the air gap.
The induced voltage immediately produces a current i, which flows down the conductor undeaneath the pole-face through the end bars and back through theconductor undeaneath the pole face, through the end bars, and back through the other conductors.
Because the current-carrying conductor lies in the magnetic field of the t t it i h i l f F l i Bpermanent magnet, it experiences a mechanical force F=l·i·B;
the force always acts in a direction to drag the conductor along with the magnetic field.g
10

INDUCTION MOTORS-SCALAR CONTROL
TORQUE IN ROTOR
The inducted voltage E its in phase with the flux, but the current I lags an angle due to the RL load due to the bars. This lagging reduces the torque for the samecurrent.
11

INDUCTION MOTORS-SCALAR CONTROL
TORQUE IN ROTOR
Because the stator and rotor fields each rotate synchronously they are
12
Because the stator and rotor fields each rotate synchronously, they are stationary with respect to each other and produce a steady torque, thus maintaining rotation of the rotor.

INDUCTION MOTORS-SCALAR CONTROL
Three-phase windings shifted 120eº
TORQUE IN ROTOR
p g e
Rotating field at 60·fs/p
Induces voltage in the rotor bars
A current flows through the rotor bars
Force applied on the rotor bars BlIF
The rotor produces mechanical torque
13The IM rotates

INDUCTION MOTORS-SCALAR CONTROL
The rotor currents, Ir produce additional air gap flux, which is 90º out of phase of the magnetizing flux But the stator voltage is applied externally and it is
INDUCTION MOTOR EQUIVALENT CIRCUIT
the magnetizing flux. But the stator voltage, is applied externally and it is proportional to and 90º out of phase of the air gap flux. Additional currents, will flow in the stator windings in order to cancel the flux due to the rotor currents.
Per phase transformer-like equivalent circuitPer phase transformer-like equivalent circuit.
14Purely resistive conductors

INDUCTION MOTORS-SCALAR CONTROL
INDUCTION MOTOR EQUIVALENT CIRCUIT
Effect of Rotor Inductance on Torque:C t l i k t ftCurrent lags since peak current occurs afterstator pole passes by reducing the torque
Iron losses are no taken into account,i.e. Ife=0
15

INDUCTION MOTORS-SCALAR CONTROLPER PHASE INDUCTION MOTOR EQUIVALENT CIRCUIT
16

INDUCTION MOTORS-SCALAR CONTROL
TORQUE
2'1'3 IsRP
222''3'1'3'1'3
3
rr
rrrrmi
rrmi
Is
RIs
sRIs
sRPT
Is
RP
21
''
1f
r
ssmm
mii
R
UI
ss
T
22
22
'3''3
''
frr
rsr
s
URIR
XXs
RR
2
2
1
''
33
rsr
sss
r
i
XXs
RR
Us
IsT
22
21
'
'3 fr
iR
Us
R
T
17
2'rs
rss XX
sRR

INDUCTION MOTORS-SCALAR CONTROL
160
T [N ]
Rs=0.2268; Rr’=0.12528; Xs=0.51252; Xr’=0.76878; Rfe=185.1; Xm=9.8554; U1L=230
140
Torque [Nm]Output power [CV]Current [A]Efficiency [%]
100
120y [ ]
Power Factor*100
60
80
40
60
0
20
18
0 100 200 300 400 500 600 700 800 900 10000
Speed, rpm

INDUCTION MOTORS-SCALAR CONTROL
160
Torque [Nm]
Rs=0.2268; Rr’=0.12528; Xs=0.51252; Xr’=0.76878; Rfe=185.1; Xm=9.8554; U1L=230
140
Torque [Nm]Output power [CV]Current [A]Efficiency [%]
100
120 Power Factor *100
80
40
60
20
19
900 920 940 960 980 10000Speed, rpm

INDUCTION MOTORS-SCALAR CONTROL
150Speed-torque curve
100
50
m]
0
Torq
ue [
N
-50
T
150
-100
20
-1500 -1000 -500 0 500 1000 1500 2000 2500 3000-150Shaft speed [rpm]

INDUCTION MOTORS-SCALAR CONTROL
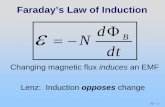
In the brake region, the rotor rotates in the opposite direction to that of the airgap flux so that s>1. This condition may arise if the stator supply phasesequence is reversed when the rotor is moving.In the regenerating region the motor as acts as a generator . The rotor runs
> i th di ti th t t fi ld <0 Th ti linm>ns ,in the same direction as the stator field, so s<0. The negative slipcorresponds to negative Rr/s . The positive resistance consumes energy duringmotoring, but the negative Rr/s generates energy and supply it to the source.
d it i
21
0 ≤ nm < nss (0,1)
nm > nss < 0
nm and ns opposite signs > 1

INDUCTION MOTORS-SCALAR CONTROL
r IRIsRIsR 222''3'1'3'1'3
SPEED CONTROL-VARIABLE FREQUENCY DRIVES
rsr
s
f
rs
r
s
rr
m
rr
m
mii
XXs
RR
UII
ss
Is
RIs
RPT
22
1
'''
3
1
33
frfr Us
RsU
sR
T
212
21
'3'3
rsr
ssrsr
ss
i
XXs
RR
sss
XXs
RR
sT2
222
2
''''
rs
f
s
f
rs
f
rsrss
fr
i sRf
UpsR
UsR
UXXsRRs
URsT2
12
12
1222
21
'23
'
3'
3''
'3
For low slip, i.e., very close to rated
speed
fff
rsr
rsrsrss
UpfUpUp
fRp
222 333 fU2
3
speed.
22
r
s
f
rs
r
sr
f
sr
f
i ff
URp
ff
fRUps
fRUpT 111
'23
'23
'23
rs
f
ri f
fU
RpT 1
'23

INDUCTION MOTORS-SCALAR CONTROLDIFFERENT SCENARIOS OF CONSTANT TORQUE MODE
1 kW, 4 pole, 1740 rev/min
416 V, 3-phase, 60 Hz
RATED OPERATING MODE
The frequency applied to the stator is 60 Hz, so synchronous speed is 1800rev/min. The motor develops rated torque at 1740 rev/min, which corresponds toa slip of (1800 1740)=60 rev/min
23
a slip of (1800-1740)=60 rev/min.
The rotor frequency is fr=sf=((1800-1740)/1800)*60 Hz =2 Hz

INDUCTION MOTORS-SCALAR CONTROLDIFFERENT SCENARIOS OF CONSTANT TORQUE MODE
OPERATION AT 6.1 HZ
The frequency applied to the stator is 6.1 Hz, so synchronous speed is 183rev/min. In order to produce the same torque as before the current in rotorbars must be exactly as it was before in magnitude, frequency and phase.bars must be exactly as it was before in magnitude, frequency and phase.This is realized when the slip speed is 60 rev/min. Thus full-load torque isproduced when the rotor turns at 183-60= 123 rev/min.
The ind ced oltage in the stator is no less than before beca se the fl is onl
24
The induced voltage in the stator is now less than before because the flux is onlyturning at 183 rev/min. The value is 240V/1800 rev/min*183 rev/min= 24.4 V ;frequency 6.1 Hz

INDUCTION MOTORS-SCALAR CONTROLDIFFERENT SCENARIOS OF CONSTANT TORQUE MODE
MOTOR STOPPED
The frequency applied to the stator is 2 Hz, so synchronous speed is 60 rev/min. In order to produce the same torque the slip speed must be again 60 rev/min This means that n=0
25
rev/min. This means that n 0.
The induced voltage in the stator is 240V/1800 rev/min*60 rev/min= 8 V ; frequency 2 Hz

INDUCTION MOTORS-SCALAR CONTROLDIFFERENT SCENARIOS OF CONSTANT TORQUE MODE
MOTOR OPERATING AS A BRAKE
The frequency applied to the stator is 0.5 Hz, so synchronous speed is 15 rev/min. In order to produce the same torque the slip speed must be again 60 rev/min This means (15-60)=-45 rev/min The flux and rotor turn in opposite
26
rev/min. This means (15 60) 45 rev/min. The flux and rotor turn in opposite directions.
The induced voltage in the stator is 2V ; frequency 0.5 Hz

INDUCTION MOTORS-SCALAR CONTROLDIFFERENT SCENARIOS OF CONSTANT TORQUE MODE
ROTOR EXCITED BY DC
The frequency applied to the stator is 0 Hz, so synchronous speed is 15 rev/min. Nevertheless, the rated torque can again be obtained provided the relative speed is 60 rev/min This happens when the rotor turns at 60 rev/min in
27
relative speed is 60 rev/min. This happens when the rotor turns at 60 rev/min in either direction. Again the rotor acts as a brake.
The induced voltage in the stator is 0V ; frequency 0Hz

INDUCTION MOTORS-SCALAR CONTROLDIFFERENT SCENARIOS OF CONSTANT TORQUE MODE
OPERATION ABOVE BASE SPEEDOPERATION ABOVE BASE SPEED
The frequency applied to the stator is 150 Hz, so synchronous speed is 4500 rev/min. In order to produce the same torque the slip speed must be again 60
/ i Th t i t i t 4440 / i
28
rev/min. The rotor is turning at 4440 rev/min.
The induced voltage in the stator is 240/1800*4500= 600V ; frequency 150 Hz

INDUCTION MOTORS-SCALAR CONTROL
400Induction motor torque-speed for variable frequency
Frequency increment: 4.6667 HzBase curve(solidline): 50 Hz
300
350Base curve(solidline): 50 Hz
250
N-m
150
200
Torq
ue, N
100
0 500 1000 1500 2000 25000
50
29
Speed, rpm

INDUCTION MOTORS-SCALAR CONTROL
305.5 kW, 50 Hz, 1440 rev/min4-poles

INDUCTION MOTORS-SCALAR CONTROL
31

INDUCTION MOTORS-SCALAR CONTROL
32

INDUCTION MOTORS-SCALAR CONTROLSPEED CONTROL-VARIABLE FREQUENCY DRIVES
F i i t b d h t i t t d b b d
33
From minimun to base speed where torque remains constant, and beyong basedspeed where due to a constant power limitation torque decreases with frequencyincrease.

INDUCTION MOTORS-SCALAR CONTROL
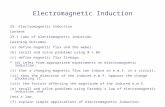
THE REQUIREMENTS FOR STOPPING
DYNAMIC BRAKINGDYNAMIC BRAKING
The next figure shows the change in the motor torque when the converter output frequency issuddenly reduced from f0 to f1. The slip changes from being positive (motoring) to negative(generating) and the direction of energy flow is reversed kinetic energy is converted to electrical(generating) and the direction of energy flow is reversed, kinetic energy is converted to electricalenergy in the motor, which is then transferred from the motor to the converter.
34
Torque–speed characteristics of an induction motor when frequency is reduced from f0 to f1

INDUCTION MOTORS-SCALAR CONTROL
THE REQUIREMENTS FOR STOPPING
DYNAMIC BRAKINGDYNAMIC BRAKING
On PWM converters, which use a diode rectifier bridge, the braking current is blocked fromreturning to the mains power supply. Therefore, unless some mechanism is provided to absorb thisenergy during braking the voltage on the DC bus will rise to destructive levelsenergy during braking, the voltage on the DC bus will rise to destructive levels.With dynamic braking, the braking energy is dissipated in a braking resistor connectedacross the DC bus of the converter. As described above, braking is achieved by reducing theinverter output frequency to be less than the actual rotor speed. The slip can be optimized to giveas high a torque per ampere as for motoringas high a torque per ampere as for motoring.Power flow is from the motor back through the inverter to the DC bus. The braking energy cannotbe returned to the mains supply because the input rectifier can only transfer power in onedirection. Instead, the energy is absorbed by the DC capacitor, whose voltage rises. To prevent theDC bus voltage rising to a dangerously high level the capacitor needs to be periodicallyDC bus voltage rising to a dangerously high level, the capacitor needs to be periodicallydischarged. This is done by means of a dynamic brake module shown in the next figure, consistingof a power electronic switch, usually an IGBT or BJT, and a discharge resistor connected acrossthe DC link capacitor.
35

INDUCTION MOTORS-SCALAR CONTROL
THE REQUIREMENTS FOR STOPPING
DYNAMIC BRAKINGDYNAMIC BRAKING
36
PWM AC converter with a DC link dynamic brake

INDUCTION MOTORS-SCALAR CONTROL
THE REQUIREMENTS FOR STOPPING
DYNAMIC BRAKINGDYNAMIC BRAKING
The IGBT or BJT is controlled by a hysteresis circuit to turn on when the capacitor voltage is too highand turn off when the voltage drops below a certain level.Alternatively the IGBT may be switched on and off at constant frequencyAlternatively, the IGBT may be switched on and off at constant frequency,with duty cycle varying linearly between 0% and 100% as bus voltage changes overspecific range.
37
DC bus voltage with hysteresis control on a dynamic brake

INDUCTION MOTORS-SCALAR CONTROL
THE REQUIREMENTS FOR STOPPING
DYNAMIC BRAKINGDYNAMIC BRAKING
The switching level of the braking IGBT should be chosen to be higher than the mains supply when itis operating at highest voltage tolerance, but below the maximum safe switching voltage of theinverter components. In practice, for a converter connected to a 3-phase 415 volt supply, with ainverter components. In practice, for a converter connected to a 3 phase 415 volt supply, with anominal DC peak voltage of 586 V, the switching level would have to be set at least 10% above thisat 650 V, but below 800 V, which is the maximum safe operating voltage of the DC bus. A practicalswitch-on level is typically 750 V, with the hysteresis between the upper and lower level being 20 Vto 30 V lower.
A 22 kW VSD and motor combination must provide 100% rated motor torque while braking. The maximum braking duty is 3 seconds in every 10 seconds.Assume that the bus voltage during braking is 650 V DC and the DC bus over-voltage trip level is set
o 30 o e
Assume that the bus voltage during braking is 650 V DC and the DC bus over voltage trip level is set at 700 V DC. What braking resistor should be used for the application?
To achieve rated torque while braking, the resistor must absorb a full 22 kW when the motor is at full speed. Therefore, the maximum DC bus current will be roughlyspeed e e o e, e a u C bus cu e be oug y
38

INDUCTION MOTORS-SCALAR CONTROL
THE REQUIREMENTS FOR STOPPING
DYNAMIC BRAKINGDYNAMIC BRAKING
To absorb 34 amps when the bus voltage is at 650 V DC, the braking resistor will need to have aresistance of 650/34 = 19 ohms. If braking only occurs for 3 sec in every 10 sec, then the duty willbe 30%. The power rating of the braking resistor will then be 30% of 22 kW, which is approximatelybe 30%. The power rating of the braking resistor will then be 30% of 22 kW, which is approximately7 kW continuous. Care must be taken to allow adequate excess power rating when selecting abraking resistor, as the instantaneous power is very high and hot spots can cause prematurefailure.The maximum transistor current will occur at the maximum DC bus voltagee a u a s s o cu e occu a e a u C bus o age
Allowing a safety margin, a braking transistor rated at 50 amps would be selected.
39

INDUCTION MOTORS-SCALAR CONTROLExamples, Three-Phase non filtered diagram
This figure shows angexample of 3P nonfiltered PWM circuitcreated to control aninduction motor Theinduction motor. Theconfiguration shown hastriplicated the opamcircuit explained before,pthere is one modulatorper phase but acommom carrier.
Note that every phase uses two transistors (IGBT) per phase to generate the final signal not four as show before called half bridge configuration
40
signal, not four as show before, called half-bridge configuration.

INDUCTION MOTORS-SCALAR CONTROLExamples, Three-Phase non filtered diagram
Output, Sinusoidal waveform current (lik 3P AC
Input, DC line. Voltage
(like a 3P AC current source)
Voltage does not
varies though
titime.
Input,Three
Output, motor torque. Depends
sinusoidal signal waveform
q pon all Inputs.
Input, One triangular signal waveform generatorC) Frequency variation Higher PWM signal resolution Output signal with less noise, higher frequency noise.
A) Frequency variationOutput frequency variation
B) Amplitude variation
41
Smaller torque variations.B) Amplitude variation
Output amplitude variation

INDUCTION MOTORS-SCALAR CONTROLA) Examples, Frequency Variation
Resultant currents
Voltage signals
(Intensity)
g g
Variation of Modulator signals in PWM generator
60 Hz signal 0,2sin PWM generator.
42
90 Hz signal 0,2s 30 Hz signal 0,2s

INDUCTION MOTORS-SCALAR CONTROLB) Examples, Amplitude Variation
Resultant currents
Voltage signals
(Intensity)
(A*=0,9 V)
(Voltage)Variation of Modulator signals in PWM generator
Original Voltage Signal 0,2sin PWM generator.
*RMS values
43
Half Amplitude (A*=0,45 V) 0,2s Double Amplitude (A*=1,8 V) 0,2s

INDUCTION MOTORS-SCALAR CONTROLC) Examples, Carrier frequency variation
Variation of Carrier signals in PWM generator
! Transistors must support higher
it hi fPWM generator.
Double carrier frequency
Resultant currents (A) Resultant currents (A)
switching frequency
( ) Resultant currents (A)
Carrier and A-Phase signal (V) Carrier and A-Phase signal (V)
1,5KHz 3KHz
Source signals
(Frequency)
A-Phase PWM signal (V) A-Phase PWM signal (V)
44

INDUCTION MOTORS-SCALAR CONTROLC) Examples, Carrier frequency variation
Variation of Carrier signals in PWM generatorPWM generator.
Half carrier frequency
Resultant currents (A) Resultant currents (A)( ) Resultant currents (A)
Carrier and A-Phase signal (V) Carrier and A-Phase signal (V)
1,5KHz 750Hz
A-Phase PWM signal (V) A-Phase PWM signal (V)
45

INDUCTION MOTORS-SCALAR CONTROLC) Transistor Switching
VV
V VVV V
A,B,C A,nB,nC NA,nB,nC NA,B,C NA,nB,C
A B CA No B No CNo A No B No CNo A B CNo A No B C
V V
V V VV V
46
A B C A No B No C No A No B No C No A B C No A No B C

INDUCTION MOTORS-SCALAR CONTROL
SPEED REGULATION- FREQUENCY-VOLTAGE CONTROL
This figure depicts three tension (3 phases) with sThis figure depicts three tension (3 phases) with sfrequency and Vs with a minimum value for near-zerofrequencies. Inputs are come from speed and it not requiresfeedback.
47
Open loop volts/Hz control with voltage-fed inverter

INDUCTION MOTORS-SCALAR CONTROL
SPEED REGULATION- FREQUENCY-VOLTAGE CONTROL
Cl d l t l ith lt /H t l d li l ti
48
Closed loop control with volts/Hz control and slip regulation

INDUCTION MOTORS-SCALAR CONTROL
49

INDUCTION MOTORS-SCALAR CONTROL
50

INDUCTION MOTORS-SCALAR CONTROL
51

INDUCTION MOTORS-SCALAR CONTROL
52

INDUCTION MOTORS-SCALAR CONTROL
53

INDUCTION MOTORS-SCALAR CONTROL
Example.Load with constant torque.q
P= 15 kW->n= 2600 rev/min
Minimum speed= 867 rev/minMaximum speed= 2600 rev/min
NmT 55
6022600
15000
60
54

INDUCTION MOTORS-SCALAR CONTROL
1. Case
2-poles motor ∆/Y 230/400The maximum voltage supply is 380/400 VConnected in Y, constant flux at 230V/50 Hz
The maximum and minimum supply frequency is:
pfn 60
Hzf
12600
45.1460
1867min
Hzf 3.4360
12600max
55

INDUCTION MOTORS-SCALAR CONTROL
fto min
fto
NmNmNmTn
uM
M 51.7078.0155155
max
NmNmNmTn
uM
M 3.5796.0155155
Si [ ]Number
kWNmP Hzu 14.22602300051.70)50(
AM180 MO 2
Size [mm] poles
56
Hzu 60)50(

INDUCTION MOTORS-SCALAR CONTROL
2. Case
4-poles motor ∆/Y 230/400The maximum voltage supply is 380/400 VConnected in Y, constant flux at 230V/50 Hz
The maximum and minimum supply frequency is:
f60
Hzf
pfn
9.282867
60
i
Hzf
Hzf
67.8660
22600
9.2860
max
min
57

INDUCTION MOTORS-SCALAR CONTROL
fto min
fto
NmNmNmTn
uM
M
11
7.6485.0155155
max
NmNmNmTn
uM
M 24.11249.0155155
Number
2
Size [mm] poles
58
kWNmP Hzu 62.17602150024.112)50( AM180 MO 4

INDUCTION MOTORS-SCALAR CONTROL
3. Case
4-poles motor ∆/Y 230/400The maximum voltage supply is 380/400 VConnected in ∆, constant flux at 400V/87 Hz
The maximum and minimum supply frequency is:
f60
Hzf
pfn
9282867
60
Hzf
Hzf
67.8660
22600
9.2860
max
min
60
59

INDUCTION MOTORS-SCALAR CONTROL
fto min
fto
NmNmNmTn
uM
M
11
7.6485.0155155
max
NmNmNmTn
uM
M 7.6485.0155155
Number
2
Size [mm] poles
60
kWNmP Hzu 16.1060215007.64)50( AM160 MO 4