[IEEE 2010 IEEE 71st Vehicular Technology Conference - Taipei, Taiwan (2010.05.16-2010.05.19)] 2010...
5
A Low Complexity Piecewise Suboptimal Detector for Signals in Alpha-Stable Interference Tarik S. Shehata, Ian Marsland, and Mohamed El-Tanany Department of Systems and Computer Engineering, Carleton University, Ottawa, ON, Canada Email:{tshehata, ianm, tanany}@sce.carleton.ca Abstract—The design of near-optimal detectors for binary sig- nals in α-stable interference using two receive antennas is consid- ered. The optimal detector requires more complex computation, whereas the linear (Gaussian) detector is practically simple but suffers from performance degradation with α-stable noise. In this paper, based on the optimal decision regions analysis, we propose to approximate the optimal decision boundaries by using linear segments which results in a novel piecewise detector. The proposed detector has much less complexity over the optimal detector. Also, the analytical evaluation shows near-optimal per- formance of the piecewise detector. Moreover, simulation results show that the proposed detector has robust performance for different values of α. I. I NTRODUCTION The symmetric alpha stable (SαS ) distribution has been widely used to model the aggregate interference in modern wireless networks. The SαS distribution is used to model the interference in the wireless ad hoc networks and wireless packet networks [1], [2], and is proposed to model the inter- ference in cognitive radio networks, wireless packet networks [3], and multiple access interference in ultrawide band systems [4]. We consider the detection of signals using independent samples from two antennas at the receiver 1 . The optimal maximum likelihood (ML) detector for signals in SαS noise requires complex computation of numerical integration or DFT operations due to the lack of a closed form expression for the probability density function [5]. The conventional linear (Gaussian) detector, which is optimal when α =2, is much simpler, however, it performs poorly when α is smaller as demonstrated and justified in [6]. In this paper, we propose a new suboptimal detector that has a near optimal performance yet has much less complexity compared to the optimal detector. The design of the proposed detector depends on the analysis of the optimal decision regions proposed in [6], which gives insights on the optimal detector behavior in processing the received samples. Based on the derived optimal decision boundaries, we propose a simple piecewise suboptimal detector that approximates the decision boundaries of the optimal detector using linear segments. The performance of the proposed piecewise detector approaches the optimal one for different values of α with much less complexity compared to the optimal ML detector. 1 For the case when one antenna is used, the ML detector reduces to the linear (Gaussian) detector. The rest of the paper is organized as follows. In Section II, the system model is described, and a background on the analysis of the optimum decision regions is presented. In Section III, the piecewise detector is proposed. In Section IV, the performance of the proposed detector is evaluated analytically and by simulation. II. SYSTEM MODEL AND BACKGROUND A. System Model Consider a wireless communication system where the re- ceiver uses two antennas. The two channels are assumed to have equal gain as in the case of line-of-sight reception. The two antennas are assumed to be far enough apart to have independent interference samples. The received signal vector is r =[r 1 r 2 ], where r i = s + n i i =1, 2 (1) where s ∈±A is a BPSK symbol, and n 1 and n 2 are indepen- dent SαS interference samples. The α-stable distribution has no closed form expression for the probability density function except for two special cases when α =1 (Cauchy distribution) and α = 2 (Gaussian distribution), so, the characteristic function is used to best describe the α-stable distribution: φ X (w)= e −γ|w| α (2) where γ is the noise dispersion, which measures the dis- tribution’s spread around its center and it is analogous to the variance in case of Gaussian distribution, and α is the characteristic exponent, which measures the thickness of the distribution’s tails; a small value of α implies more impulses in the noise samples. The probability density function, f α (x), can be calculated numerically using the inverse Fourier transform of (2). The optimal maximum likelihood (ML) detector computes the following test statistics: log f α [r 1 − A]f α [r 2 − A] f α [r 1 + A]f α [r 2 + A] s1 < s0 0 (3) where s 0 is the hypothesis that s = −A was transmitted, and s 1 is the hypothesis that s =+A was transmitted. It can be seen that the optimal detector requires complex computations to calculate the likelihood function. 978-1-4244-2519-8/10/$26.00 ©2010 IEEE
Transcript of [IEEE 2010 IEEE 71st Vehicular Technology Conference - Taipei, Taiwan (2010.05.16-2010.05.19)] 2010...
![Page 1: [IEEE 2010 IEEE 71st Vehicular Technology Conference - Taipei, Taiwan (2010.05.16-2010.05.19)] 2010 IEEE 71st Vehicular Technology Conference - A Low Complexity Piecewise Suboptimal](https://reader037.fdocument.org/reader037/viewer/2022092902/5750a8291a28abcf0cc685a8/html5/thumbnails/1.jpg)
A Low Complexity Piecewise Suboptimal Detectorfor Signals in Alpha-Stable Interference
Tarik S. Shehata, Ian Marsland, and Mohamed El-Tanany
Department of Systems and Computer Engineering, Carleton University, Ottawa, ON, Canada
Email:{tshehata, ianm, tanany}@sce.carleton.ca
Abstract—The design of near-optimal detectors for binary sig-nals in α-stable interference using two receive antennas is consid-ered. The optimal detector requires more complex computation,whereas the linear (Gaussian) detector is practically simple butsuffers from performance degradation with α-stable noise. Inthis paper, based on the optimal decision regions analysis, wepropose to approximate the optimal decision boundaries by usinglinear segments which results in a novel piecewise detector. Theproposed detector has much less complexity over the optimaldetector. Also, the analytical evaluation shows near-optimal per-formance of the piecewise detector. Moreover, simulation resultsshow that the proposed detector has robust performance fordifferent values of α.
I. INTRODUCTION
The symmetric alpha stable (SαS ) distribution has been
widely used to model the aggregate interference in modern
wireless networks. The SαS distribution is used to model the
interference in the wireless ad hoc networks and wireless
packet networks [1], [2], and is proposed to model the inter-
ference in cognitive radio networks, wireless packet networks
[3], and multiple access interference in ultrawide band systems
[4].
We consider the detection of signals using independent
samples from two antennas at the receiver1. The optimal
maximum likelihood (ML) detector for signals in SαS noise
requires complex computation of numerical integration or
DFT operations due to the lack of a closed form expression
for the probability density function [5]. The conventional
linear (Gaussian) detector, which is optimal when α = 2,
is much simpler, however, it performs poorly when α is
smaller as demonstrated and justified in [6]. In this paper,
we propose a new suboptimal detector that has a near optimal
performance yet has much less complexity compared to the
optimal detector. The design of the proposed detector depends
on the analysis of the optimal decision regions proposed in
[6], which gives insights on the optimal detector behavior
in processing the received samples. Based on the derived
optimal decision boundaries, we propose a simple piecewise
suboptimal detector that approximates the decision boundaries
of the optimal detector using linear segments. The performance
of the proposed piecewise detector approaches the optimal one
for different values of α with much less complexity compared
to the optimal ML detector.
1For the case when one antenna is used, the ML detector reduces to thelinear (Gaussian) detector.
The rest of the paper is organized as follows. In Section
II, the system model is described, and a background on the
analysis of the optimum decision regions is presented. In
Section III, the piecewise detector is proposed. In Section
IV, the performance of the proposed detector is evaluated
analytically and by simulation.
II. SYSTEM MODEL AND BACKGROUND
A. System Model
Consider a wireless communication system where the re-
ceiver uses two antennas. The two channels are assumed to
have equal gain as in the case of line-of-sight reception. The
two antennas are assumed to be far enough apart to have
independent interference samples. The received signal vector
is r = [r1r2], where
ri = s + ni i = 1, 2 (1)
where s ∈ ±A is a BPSK symbol, and n1 and n2 are indepen-
dent SαS interference samples. The α-stable distribution has
no closed form expression for the probability density function
except for two special cases when α = 1 (Cauchy distribution)
and α = 2 (Gaussian distribution), so, the characteristic
function is used to best describe the α-stable distribution:
φX(w) = e−γ|w|α (2)
where γ is the noise dispersion, which measures the dis-
tribution’s spread around its center and it is analogous to
the variance in case of Gaussian distribution, and α is the
characteristic exponent, which measures the thickness of the
distribution’s tails; a small value of α implies more impulses in
the noise samples. The probability density function, fα(x), can
be calculated numerically using the inverse Fourier transform
of (2).
The optimal maximum likelihood (ML) detector computes
the following test statistics:
log{
fα[r1 − A]fα[r2 − A]fα[r1 + A]fα[r2 + A]
} s1�<s0
0 (3)
where s0 is the hypothesis that s = −A was transmitted, and
s1 is the hypothesis that s = +A was transmitted. It can be
seen that the optimal detector requires complex computations
to calculate the likelihood function.
978-1-4244-2519-8/10/$26.00 ©2010 IEEE
![Page 2: [IEEE 2010 IEEE 71st Vehicular Technology Conference - Taipei, Taiwan (2010.05.16-2010.05.19)] 2010 IEEE 71st Vehicular Technology Conference - A Low Complexity Piecewise Suboptimal](https://reader037.fdocument.org/reader037/viewer/2022092902/5750a8291a28abcf0cc685a8/html5/thumbnails/2.jpg)
−10 −8 −6 −4 −2 0 2 4 6 8 10−10
−8
−6
−4
−2
0
2
4
6
8
10
s1
s0
r1
r2
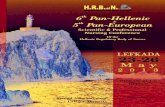
Fig. 1. Optimal decision regions with α = 1, SNR = 0 dB. Shaded area:decide s1, white area: decide so.
B. Optimal decision regions
Analyzing the decision regions of the optimal detector is a
new tool to understand the behavior of the optimum detector
of signals in SαS noise [6]. By assuming that the channel
is constant and has equal gain for the two antennas at the
receiver, the optimal decision boundaries can be derived for
the case when α = 1 to be:
r2 = −r1 (4a)
r2 = −γ2 + A2
r1(4b)
Fig. 1 shows the optimal decision regions for α = 1. By
comparing these optimal decision regions with those of the
linear detector2, it can be seen that the linear detector has poor
performance compared to the optimum detector. Also, Fig. 2
shows the optimal decision boundaries (found numerically)
in the fourth quadrant only evaluated at different values of
SNR. As shown in the figure, the optimal decision boundaries
for α �= 1 shares the linear boundary in (4a) and the curved
boundaries are getting close to the case when α = 1 as the
SNR increases. So, at higher SNR, the curved boundaries
for different values of α can be approximated by (4b). In
the following section, we will show how to use the optimal
decision boundaries to design a near optimal low-complexity
detector.
III. PIECEWISE SUBOPTIMAL DETECTORS
Based on the analysis of the optimal decision regions, we
propose new suboptimal detectors that linearly approximate
the optimal decision boundaries shown in Fig. 1.
1) Inverse-linear Detector:As shown in Fig. 1, the optimal decision boundaries in the
2The decision boundary for the linear detector is r2 = −r1.
0 10 20 30 40−40
−30
−20
−10
0 0 dB10 dB
15 dB
20 dB
r1
r2
α = 0.7α = 1α = 1.5α = 1.9
Fig. 2. Optimal curved decision boundaries.
second and fourth quadrants can be approximated such
that the decision regions are{s = +A if r2 � −r1
s = −A if r2 > −r1
(5)
This detector looks like the linear detector but with
reverse decision regions; however, as shown in the next
section, it has the same performance as the linear detector.
2) Piecewise Detector:In this detector, the curved boundaries in (4b) are approx-
imated by using piecewise symmetric linear segments
passing by the boundaries cross point (±a0,∓ao) as
shown in Fig. 3. Due to symmetry, the fourth quadrant is
considered where the linear segment is
r2 = mr1 − (m + 1)ao (6)
where ao =√
γ2 + A2 and m is the slope of the
segment. The linear segment crosses the boundary (4b)
in two points (a0,−ao) and ( ao
m ,−aom). When m = 1,
the line in (6) is a tangent to the boundary at the point
(ao,−ao), while at m > 1 and m < 1, the line forms
the two segments shown in Fig. 3. As can be seen,
the accuracy of the linear approximation in (6) depends
on the slope m. We propose to choose m such that
the excess probability of error, β, is minimized. The
excess probability of error is defined as the difference
between the probability of bit error of the piecewise and
optimal detectors. By comparing the decision regions in
which both the optimum and the piecewise detector have
incorrect decisions, the excess probability of error, β, is
reduced to:
β = 2×⎡⎣∫∫
R1
Λα(r1, r2) dr2 dr1 +∫∫R2
Λα(r1, r2) dr2 dr1
⎤⎦
(7)
![Page 3: [IEEE 2010 IEEE 71st Vehicular Technology Conference - Taipei, Taiwan (2010.05.16-2010.05.19)] 2010 IEEE 71st Vehicular Technology Conference - A Low Complexity Piecewise Suboptimal](https://reader037.fdocument.org/reader037/viewer/2022092902/5750a8291a28abcf0cc685a8/html5/thumbnails/3.jpg)
−10 −8 −6 −4 −2 0 2 4 6 8 10−10
−8
−6
−4
−2
0
2
4
6
8
10
s1
s0 (ao,−ao)
(ao
m,−aom)
r1
r2
Fig. 3. Decision boundaries of the piecewise detector.
1 1.5 2 2.5 3 3.5 410−5
10−4
10−3
10−2
40 dB
0 dB
m
β
Fig. 4. The excess probability of error (β) evaluated at SNR = 0, 1, ..., 40dB.
where Λα(r1, r2) = fα(r1, r2|s = +A) − fα(r1, r2|s =−A) and R1 : {r2 = −r1 → −−a2
o
r1, r1 = ao
m → ao} and
R2 : {r2 = −−a2o
r1→ −r1, r1 = 0 → ao
m }.
As can be seen, it is difficult to minimize β analytically,
instead, it is evaluated numerically. Fig. 4 shows β at
different values of the SNR. The optimal slope, mopt,
can be calculated numerically for different values of γand SNR and stored in memory, and also, it can be fitted
linearly with SNR. Moreover, Fig. 4 suggests m = 1 as a
simple choice of the slope value. As shown in the figure,
the difference between the excess probability of error, β,
when m = 1 and m = mopt is small enough to use
m = 1 as a good approximation of the optimal slope.
IV. PERFORMANCE EVALUATION AND SIMULATION
RESULTS
In this section, the performance of the optimal, the linear
and the piecewise detectors will be evaluated analytically in
the case when α = 1.
A. Optimum Detector
By using the decision regions in Fig. 1, the conditional
probability of correct decision can be evaluated as follows:
Pc|−A =∫∫Z
fα(r1, r2|s = −A) dr1 dr2 (8)
= 2 ×ao∫
r1=0
−r1∫r2=− a2
or1
fα(r1, r2|s = −A) dr1 dr2+
2 ×∞∫
r1=ao
− a2o
r1∫r2=−r1
fα(r1, r2|s = −A) dr1 dr2+
0∫r1=−∞
0∫r2=−∞
fα(r1, r2|s = −A) dr1 dr2
where ao =√
γ2 + A2 and fα(r1, r2|s = −A) is the
conditional joint distribution of the received samples. For the
case when α = 1,
fα(r1, r2|s = −A) =γ2
π2
2∏i=1
1γ2 + (ri + A)2
. (9)
Assuming that the transmitted symbols are equally likely, the
average probability of error is:
Pe = 1 − (Pc|−A) (10)
The double integral in (8) can be reduced to a single integral,
which can be simply evaluated numerically, by applying the
following identity:
b∫r1=a
f2(r1)∫r2=f1(r1)
fα(r1, r2|s = −A) dr1 dr2
=γ2
π2
b∫r1=a
tan−1[
A+f2(r1)γ
]− tan−1
[A+f1(r1)
γ
]γ [γ2 + (r1 + A)2]
dr1 (11)
B. Linear Detector
The probability of correct decision of the linear detector can
be calculated analytically by changing the decision boundaries
![Page 4: [IEEE 2010 IEEE 71st Vehicular Technology Conference - Taipei, Taiwan (2010.05.16-2010.05.19)] 2010 IEEE 71st Vehicular Technology Conference - A Low Complexity Piecewise Suboptimal](https://reader037.fdocument.org/reader037/viewer/2022092902/5750a8291a28abcf0cc685a8/html5/thumbnails/4.jpg)
in (8):
P c|−A =∫∫Z
fα(r1, r2|s = −A) dr1 dr2
= 2 ×∞∫
r1=0
−r1∫r2=−∞
fα(r1, r2|s = −A) dr1 dr2+
0∫r1=−∞
0∫r2=−∞
fα(r1, r2|s = −A) dr1 dr2 (12)
Then, the probability of error can be calculated using (10).
For the case of the Inverse-linear detector, by using the
corresponding decision regions as illustrated by (5), it can be
shown that the resultant probability of error is the same as that
of the linear detector.
C. Piecewise Detector
To evaluate the performance of the piecewise detector, the
decision regions in Fig. 3 are used to construct the integration
limits of the joint probability density function in (8). So the
conditional probability of correct decision of the piecewise
detector is:
P c|−A =
= 2 ×ao∫
r1=0
∫ −r1
r2=mr1−(m+1)ao
fα(r1, r2|s = −A) dr1 dr2+
2 ×(1+ 1
m )ao∫r1=ao
mr1−(m+1)ao∫r2=−r1
fα(r1, r2|s = −A) dr1 dr2+
2 ×∞∫
r1=(1+ 1m )ao
0∫r2=−r1
fα(r1, r2|s = −A) dr1 dr2+
0∫r1=−∞
0∫r2=−∞
fα(r1, r2|s = −A) dr1 dr2 (13)
The performance of the piecewise detector is compared to
the optimal and linear detectors and validated by simulation
results in Fig. 5. It can be seen that the performance of the
piecewise detector approaches the optimal one (within 0.2 dB).
D. Simulation Results
To evaluate the performance of the proposed detectors, the
probability of error of the optimal and suboptimal piecewise
detector is evaluated by simulation for the case when α = 0.7,
1, 1.5 and 1.9. Because the noise variance is not defined for
values of α < 2, the noise dispersion, γ, is used instead to
define the SNR as Es4γ , where Es = 2A2 is the received energy
per symbol3. γ is set to 1 in all simulations. The receiver uses
two antennas to get two independent interference samples. To
calculate an accurate Pe, up to 108 frames with 250 bits each
3Note that when α = 2, the noise variance is defined as 2γ, whichcorresponds to No
2for an AWGN channel.
are transmitted, and the simulation is stopped when the number
of bit errors reaches 104. The simulation results validate the
analytic performance of the piecewise detector in case when
α = 1, and also, the performance is evaluated when α �= 1.
Fig. 5 shows the performance of the piecewise detector with
m = 1 and m = mopt. It can be seen that the performance of
the proposed piecewise detector approaches the optimal one at
much less complexity compared to the optimal ML detector
which requires numerical integration and/or DFT operations
to implement the test statistics in (3). Also, when m = 1 is
used, the performance of the piecewise detector is only 0.2dB less than the optimal one at a BER of 4 × 10−3. When
m = mopt is used, the performance of the piecewise detector
becomes more close to the optimal performance because it has
the minimum excess probability of error, which is consistent
with the analysis in Section III.
Although the proposed piecewise detector is designed for
the case when α = 1, it shows robust performance for
different values of α. Fig. 6 and Fig. 7 show the near optimal
performance of the proposed detector for α = 0.7 and 1.5,
respectively. Fig. 8 shows the performance when α = 1.9. It
can be seen that the performance of the piecewise detector
approaches the optimal performance at higher SNR, however,
it is almost 1 dB less that the optimal at lower SNR. This
performance is expected because, at higher SNR, the optimal
decision boundaries when α approaches 2 become more close
to the case when α = 1, as shown in Fig. 2, so the optimal
boundaries can be well approximated by (4). However, this
approximation becomes loose at lower values of SNR, which
results in performance degradation of the piecewise detector.
This degradation can be improved by adjusting the piecewise
detector parameters such as the cross point, ao, and the slope
m to give a better approximation of the optimal boundaries
when α �= 1.
V. CONCLUSION
A new piecewise suboptimal detector is proposed to detect
signals in symmetric α−stable interference using two receive
antennas. The proposed detector approximates the optimal
decision boundaries by using linear segments which reduces
the complexity compared to the optimal detector. The analyt-
ical performance evaluation and the simulation results show
that the piecewise detector has a superior performance over
the conventional linear detector and also it has near optimal
performance. Moreover, the piecewise detector shows robust
performance for different values of α.
REFERENCES
[1] E. Sousa, “Interference modeling in a direct-sequence spread-spectrumpacket radio network,” IEEE Transactions on Communications, vol. 38,no. 9, pp. 1475–1482, Sep 1990.
[2] J. Ilow and D. Hatzinakos, “Analytic alpha-stable noise modeling in apoisson field of interferers or scatterers,” IEEE Transactions on SignalProcessing, vol. 46, no. 6, pp. 1601–1611, Jun 1998.
[3] M. Win, P. Pinto, and L. Shepp, “A mathematical theory of networkinterference and its applications,” Proceedings of the IEEE, vol. 97, no. 2,pp. 205–230, Feb. 2009.
![Page 5: [IEEE 2010 IEEE 71st Vehicular Technology Conference - Taipei, Taiwan (2010.05.16-2010.05.19)] 2010 IEEE 71st Vehicular Technology Conference - A Low Complexity Piecewise Suboptimal](https://reader037.fdocument.org/reader037/viewer/2022092902/5750a8291a28abcf0cc685a8/html5/thumbnails/5.jpg)
0 5 10 15 20 25 3010−4
10−3
10−2
10−1
SNR (dB)
Pe
OptimumPiecewise (m = 1)Piecewise (m = mopt)Linear
Fig. 5. Analytical and simulated probability of error with α = 1. Analytic:solid lines, simulations: markers only.
20 25 30 35 40 45 5010−4
10−3
10−2
10−1
SNR (dB)
BE
R
OptimumPiecewise (m = 1)Piecewise (m = mopt)Linear
Fig. 6. Performance comparison with α = 0.7.
[4] S. Niranjayan and N. C. Beaulieu, “A myriad filter detector for UWBmultiuser communication,” in IEEE International Conference on Com-munications, 2008. ICC ’08., May 2008, pp. 3918–3922.
[5] C. L. Nikias and M. Shao, Signal Processing with Alpha-Stable Distri-butions and Applications. John Wiley & Sons Canada, 1995.
[6] T. S. Shehata, I. Marsland, and M. El-Tanany, “A novel frameworkfor signal detection in alpha-stable interference,” in IEEE VehicularTechnology Conference, 2010. VTC ’10., May 2010.
0 5 10 15 2010−5
10−4
10−3
10−2
10−1
SNR (dB)
BE
R
OptimumPiecewise (m = 1)Piecewise (m = mopt)Linear
Fig. 7. Performance comparison with α = 1.5.
0 5 10 15 2010−5
10−4
10−3
10−2
10−1
SNR (dB)
BE
R
OptimumPiecewise (m = 1)Piecewise (m = mopt)Linear
Fig. 8. Performance comparison with α = 1.9.