[IEEE 2004 IEEE International Solid-State Circuits Conference - San Francisco, CA, USA (15-19 Feb....
10
• 2004 IEEE International Solid-State Circuits Conference 0-7803-8267-6/04 ©2004 IEEE ISSCC 2004 / SESSION 15 / WIRELESS CONSUMER ICs / 15.3 15.3 All-Digital Phase-Domain TX Frequency Synthesizer for Bluetooth Radios in 0.13µm CMOS Robert Bogdan Staszewski 1 , Chih-Ming Hung 1 , Ken Maggio 1 , John Wallberg 1 , Dirk Leipold 1 , Poras T. Balsara 2 1 Texas Instruments, Dallas, TX 2 University of Texas at Dallas, Richardson, TX Traditional designs of commercial frequency synthesizers for multi-GHz mobile RF wireless applications are based on a charge-pump PLL. Unfortunately, the required design flow and circuits techniques are quite analog intensive and utilize process technologies that are incompatible with a digital baseband, now built in a low-voltage deep-submicron CMOS process with no analog extensions. Block diagram of the proposed frequency synthesizer that uses digital design and circuit techniques from the ground up is pre- sented in Fig. 15.3.1. At the heart, there is a digitally-controlled oscillator (DCO) that deliberately avoids any analog tuning volt- age controls [1]. Fine frequency resolution is achieved through high-speed Σ∆ dithering. This allows for its loop control circuit- ry to be implemented in a fully digital manner as suggested in [2]. The all-digital PLL (ADPLL) operates in a digitally-synchro- nous fixed-point phase domain. The variable phase R V [i] is determined by counting the number of rising clock transitions of the DCO oscillator clock. The reference phase R R [k] is obtained by accumulating the frequency command word (FCW) – a.k.a fractional frequency division ratio N – with every rising edge of the retimed frequency reference (FREF) clock. The sampled variable phase R V [k] is subtracted from the reference phase in a synchronous arithmetic phase detector. The digital phase error is filtered by a digital loop filter and then normalized by the DCO gain. It must be recognized that the two clock domains, FREF and DCO, are entirely asynchronous and it is difficult to physi- cally compare the two digital phase values without having to face metastability problems. Consequently, the digital-word phase comparison is performed in the same clock domain. The synchro- nous operation is achieved by over-sampling the FREF clock by the high-rate DCO clock. The resulting retimed CKR clock is used throughout the system. The main advantage of keeping the phase information in fixed- point digital numbers is that after the conversion, it cannot be fur- ther corrupted by noise. Consequently, the phase detector could be simply realized as an arithmetic subtractor that performs an exact digital operation. Therefore, the number of conversion places is kept at minimum: a single point where the continuous- ly-valued clock edge delay is compared in a time-to-digital convert- er (TDC). It should be emphasized that it is very advantageous to operate in the phase domain for several reasons. First, the phase detector used is not a conventional correlative multiplier generat- ing reference spurs [3]. Here, an arithmetic subtractor is used and it does not introduce any spurs into the loop. Second, the dynam- ic range of the phase error could be made arbitrarily large simply by increasing word-length of the phase accumulators. Conventional three-state phase/frequency detectors are typically limited to only ±2π of the compare rate. Third, the phase domain operation is amenable to digital implementations, which is quite opposite to the conventional approach. Due to the DCO edge counting nature, the phase quantization resolution as described above cannot be better than ±1/2 of the DCO clock cycle. For wireless applications, a finer resolution is required. This is accomplished without foresaking a digitally- intensive approach. The whole-clock-domain quantization error ε is corrected by means of a fractional error correction circuit based on a TDC. The TDC (Fig. 15.3.2) measures the fractional delay difference between the reference clock and the next rising edge of the DCO clock. It has a resolution of a single inverter delay, which in this deep-submicron CMOS process is considered the most stable logic-level regenerative delay and is better than 40ps. This results in a GSM-quality phase detection mechanism, as evidenced by the excellent close-in and rms phase-noise meas- urement results. The TDC operates by passing the DCO clock through a chain of inverters. The delayed-clock replica vector is then sampled by the FREF clock using an array of registers whose outputs form a pseudo-thermometer code. Figure 15.3.3 shows the TDC timing and the decoded outputs. The raw bina- ry TDC output is normalized by the DCO clock period before feeding it to the loop. The combination of the arithmetic phase detector and the TDC is considered to be a replacement of a con- ventional phase/frequency detector. The oscillating frequency is dynamically controlled by directly modulating the DCO frequency in a feed-forward manner with PLL loop compensation such that it effectively removes the loop dynamics from the modulating transmit path. The rest of the loop, including all error sources, operates under the normal closed-loop regime. This method is similar to the two-point direct modulation scheme [4], but because of its digital nature, it is exact and does not require any analog component matching, except for the DCO gain K DCO =∆f/∆OTW calibration, which is achieved in digital domain just-in-time with every packet [5]. OTW is the oscillator tuning word and is analogous to the volt- age tuning for a VCO. Figure 15.3.4 is a simplified diagram of a near-class-E RF power amplifier whose amplitude (power) is controlled digitally with 3.5-bit precision by means of binary-weighted transistor switch- es followed by a matching network. The close-in synthesizer phase noise is measured at -86.2dBc/Hz (Fig. 15.3.5). Eye-diagram and TX spectrum in Fig. 15.3.6 indi- cate great margin over the Bluetooth specifications. The inte- grated rms phase noise is 0.9 O (GSM spec: ≤5 O ). The close-in spu- rious tones are below -62dBc and the far-out spurious tones are below -80dBc. Settling time is ≤50µs. The chip has passed the official Bluetooth qualification and is in production. Figure 15.3.7 shows a micrograph of the complete single-chip Bluetooth radio. It is fabricated in a 0.13µm digital CMOS process with copper interconnects, 1.5V transistors, 0.35µm min- imum metal pitch, 2.9nm gate oxide thickness and with no extra masks. The TX part consists of the DCO, PA, ADPLL and the TX modulator. Total continuous power consumption during TX is 25mA at 1.5V supply and 2.5dBm RF output power, plus 3mA consumed by the digital baseband. References: [1] R. B. Staszewski et al., “A First Digitally-Controlled Oscillator in a Deep-Submicron CMOS Process for Multi-GHz Wireless Applications,” Dig. RFIC Symp., pp. 81–84, June 2003. [2] R. B. Staszewski et al., “Digitally-Controlled Oscillator (DCO)-Based Architecture for RF Frequency Synthesis in a Deep-Submicron CMOS Pprocess,” Trans. on Circuits and Systems II, vol. 50, no. 11, pp. 815-828, Nov. 2003. [3] A. Kajiwara, M. Nakagawa, “A new PLL Frequency Synthesizer with High Switching Speed,” Trans. on Vehicular Technology, vol. 41, no. 4, pp. 407–413, Nov 1992. [4] M. Bopp et al., “A DECT Transceiver Chip Set Using SiGe Technology,” ISSCC Dig. Tech. Papers, pp. 68–69, Feb. 1999. [5] R. B. Staszewski et al., “Just-in-Time Gain Estimation of an RF Digitally-Controlled Oscillator,” Dig. CICC Conf., pp. 571–574, Sept. 2003.
Transcript of [IEEE 2004 IEEE International Solid-State Circuits Conference - San Francisco, CA, USA (15-19 Feb....
![Page 1: [IEEE 2004 IEEE International Solid-State Circuits Conference - San Francisco, CA, USA (15-19 Feb. 2004)] 2004 IEEE International Solid-State Circuits Conference (IEEE Cat. No.04CH37519)](https://reader042.fdocument.org/reader042/viewer/2022020609/575082541a28abf34f98d2c2/html5/page/1.jpg)
• 2004 IEEE International Solid-State Circuits Conference 0-7803-8267-6/04 ©2004 IEEE
ISSCC 2004 / SESSION 15 / WIRELESS CONSUMER ICs / 15.3
15.3 All-Digital Phase-Domain TX Frequency Synthesizer for Bluetooth Radios in 0.13µm CMOS
Robert Bogdan Staszewski1, Chih-Ming Hung1, Ken Maggio1, John Wallberg1, Dirk Leipold1, Poras T. Balsara2
1Texas Instruments, Dallas, TX 2University of Texas at Dallas, Richardson, TX
Traditional designs of commercial frequency synthesizers formulti-GHz mobile RF wireless applications are based on acharge-pump PLL. Unfortunately, the required design flow andcircuits techniques are quite analog intensive and utilize processtechnologies that are incompatible with a digital baseband, nowbuilt in a low-voltage deep-submicron CMOS process with noanalog extensions.
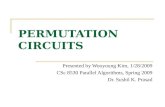
Block diagram of the proposed frequency synthesizer that usesdigital design and circuit techniques from the ground up is pre-sented in Fig. 15.3.1. At the heart, there is a digitally-controlledoscillator (DCO) that deliberately avoids any analog tuning volt-age controls [1]. Fine frequency resolution is achieved throughhigh-speed Σ∆ dithering. This allows for its loop control circuit-ry to be implemented in a fully digital manner as suggested in[2]. The all-digital PLL (ADPLL) operates in a digitally-synchro-nous fixed-point phase domain. The variable phase RV[i] isdetermined by counting the number of rising clock transitions ofthe DCO oscillator clock. The reference phase RR[k] is obtainedby accumulating the frequency command word (FCW) – a.k.afractional frequency division ratio N – with every rising edge ofthe retimed frequency reference (FREF) clock. The sampledvariable phase RV[k] is subtracted from the reference phase in asynchronous arithmetic phase detector. The digital phase erroris filtered by a digital loop filter and then normalized by the DCOgain. It must be recognized that the two clock domains, FREFand DCO, are entirely asynchronous and it is difficult to physi-cally compare the two digital phase values without having to facemetastability problems. Consequently, the digital-word phasecomparison is performed in the same clock domain. The synchro-nous operation is achieved by over-sampling the FREF clock bythe high-rate DCO clock. The resulting retimed CKR clock isused throughout the system.
The main advantage of keeping the phase information in fixed-point digital numbers is that after the conversion, it cannot be fur-ther corrupted by noise. Consequently, the phase detector couldbe simply realized as an arithmetic subtractor that performs anexact digital operation. Therefore, the number of conversionplaces is kept at minimum: a single point where the continuous-ly-valued clock edge delay is compared in a time-to-digital convert-er (TDC). It should be emphasized that it is very advantageous tooperate in the phase domain for several reasons. First, the phasedetector used is not a conventional correlative multiplier generat-ing reference spurs [3]. Here, an arithmetic subtractor is used andit does not introduce any spurs into the loop. Second, the dynam-ic range of the phase error could be made arbitrarily large simplyby increasing word-length of the phase accumulators.Conventional three-state phase/frequency detectors are typicallylimited to only ±2π of the compare rate. Third, the phase domainoperation is amenable to digital implementations, which is quiteopposite to the conventional approach.
Due to the DCO edge counting nature, the phase quantizationresolution as described above cannot be better than ±1/2 of theDCO clock cycle. For wireless applications, a finer resolution isrequired. This is accomplished without foresaking a digitally-
intensive approach. The whole-clock-domain quantization errorε is corrected by means of a fractional error correction circuitbased on a TDC. The TDC (Fig. 15.3.2) measures the fractionaldelay difference between the reference clock and the next risingedge of the DCO clock. It has a resolution of a single inverterdelay, which in this deep-submicron CMOS process is consideredthe most stable logic-level regenerative delay and is better than40ps. This results in a GSM-quality phase detection mechanism,as evidenced by the excellent close-in and rms phase-noise meas-urement results. The TDC operates by passing the DCO clockthrough a chain of inverters. The delayed-clock replica vector isthen sampled by the FREF clock using an array of registerswhose outputs form a pseudo-thermometer code. Figure 15.3.3shows the TDC timing and the decoded outputs. The raw bina-ry TDC output is normalized by the DCO clock period beforefeeding it to the loop. The combination of the arithmetic phasedetector and the TDC is considered to be a replacement of a con-ventional phase/frequency detector.
The oscillating frequency is dynamically controlled by directlymodulating the DCO frequency in a feed-forward manner withPLL loop compensation such that it effectively removes the loopdynamics from the modulating transmit path. The rest of theloop, including all error sources, operates under the normalclosed-loop regime. This method is similar to the two-pointdirect modulation scheme [4], but because of its digital nature, itis exact and does not require any analog component matching,except for the DCO gain KDCO=∆f/∆OTW calibration, which isachieved in digital domain just-in-time with every packet [5].OTW is the oscillator tuning word and is analogous to the volt-age tuning for a VCO.
Figure 15.3.4 is a simplified diagram of a near-class-E RF poweramplifier whose amplitude (power) is controlled digitally with3.5-bit precision by means of binary-weighted transistor switch-es followed by a matching network.
The close-in synthesizer phase noise is measured at -86.2dBc/Hz(Fig. 15.3.5). Eye-diagram and TX spectrum in Fig. 15.3.6 indi-cate great margin over the Bluetooth specifications. The inte-grated rms phase noise is 0.9O (GSM spec: ≤5O). The close-in spu-rious tones are below -62dBc and the far-out spurious tones arebelow -80dBc. Settling time is ≤50µs. The chip has passed theofficial Bluetooth qualification and is in production.
Figure 15.3.7 shows a micrograph of the complete single-chipBluetooth radio. It is fabricated in a 0.13µm digital CMOSprocess with copper interconnects, 1.5V transistors, 0.35µm min-imum metal pitch, 2.9nm gate oxide thickness and with no extramasks. The TX part consists of the DCO, PA, ADPLL and the TXmodulator. Total continuous power consumption during TX is25mA at 1.5V supply and 2.5dBm RF output power, plus 3mAconsumed by the digital baseband.
References:[1] R. B. Staszewski et al., “A First Digitally-Controlled Oscillator in aDeep-Submicron CMOS Process for Multi-GHz Wireless Applications,”Dig. RFIC Symp., pp. 81–84, June 2003.[2] R. B. Staszewski et al., “Digitally-Controlled Oscillator (DCO)-BasedArchitecture for RF Frequency Synthesis in a Deep-Submicron CMOSPprocess,” Trans. on Circuits and Systems II, vol. 50, no. 11, pp. 815-828,Nov. 2003.[3] A. Kajiwara, M. Nakagawa, “A new PLL Frequency Synthesizer withHigh Switching Speed,” Trans. on Vehicular Technology, vol. 41, no. 4,pp. 407–413, Nov 1992.[4] M. Bopp et al., “A DECT Transceiver Chip Set Using SiGe Technology,”ISSCC Dig. Tech. Papers, pp. 68–69, Feb. 1999.[5] R. B. Staszewski et al., “Just-in-Time Gain Estimation of an RFDigitally-Controlled Oscillator,” Dig. CICC Conf., pp. 571–574, Sept.2003.
![Page 2: [IEEE 2004 IEEE International Solid-State Circuits Conference - San Francisco, CA, USA (15-19 Feb. 2004)] 2004 IEEE International Solid-State Circuits Conference (IEEE Cat. No.04CH37519)](https://reader042.fdocument.org/reader042/viewer/2022020609/575082541a28abf34f98d2c2/html5/page/2.jpg)
• 2004 IEEE International Solid-State Circuits Conference 0-7803-8267-6/04 ©2004 IEEE
ISSCC 2004 / February 17, 2004 / Salon 9 / 2:30 PM
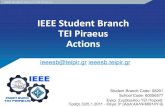
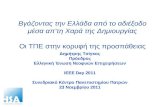
Figure 15.3.1: Synchronous phase-domain all-digital PLL-based transmitter.
Figure 15.3.3: Timing of TDC signals.
��������
��� ��� ���
����������
��������
���
����
���� ���� �� � ��!� ��� � ���!�
�"��� ���� �"� � ��!� ���!��"�� �
#$��%�&��������%����'������(��
�������)*�
�
���+�
����
����
�� �
��!�
��,�
��-�
��.�
��/�
��0�
���
����
���)�+� ++����++++
-��������
�����������
Figure 15.3.2: Fractional error correction based on a time-to-digitalconverter (TDC).
Figure 15.3.4: Near-class-E RF power amplifier with digitally-controlledamplitude regulation (half-circuit).
Figure 15.3.5: Close-in spectrum of an unmodulated RF carrier at2440MHz.
Figure 15.3.6: Measured Bluetooth TX spectrum and eye-diagram usingRohde&Schwarz (R&S) FSIQ-7 signal analyzer.
![Page 3: [IEEE 2004 IEEE International Solid-State Circuits Conference - San Francisco, CA, USA (15-19 Feb. 2004)] 2004 IEEE International Solid-State Circuits Conference (IEEE Cat. No.04CH37519)](https://reader042.fdocument.org/reader042/viewer/2022020609/575082541a28abf34f98d2c2/html5/page/3.jpg)
Figure 15.3.7: Die micrograph of the single-chip Bluetooth radio.
• 2004 IEEE International Solid-State Circuits Conference 0-7803-8267-6/04 ©2004 IEEE
![Page 4: [IEEE 2004 IEEE International Solid-State Circuits Conference - San Francisco, CA, USA (15-19 Feb. 2004)] 2004 IEEE International Solid-State Circuits Conference (IEEE Cat. No.04CH37519)](https://reader042.fdocument.org/reader042/viewer/2022020609/575082541a28abf34f98d2c2/html5/page/4.jpg)
• 2004 IEEE International Solid-State Circuits Conference 0-7803-8267-6/04 ©2004 IEEE
Figure 15.3.1: Synchronous phase-domain all-digital PLL-based transmitter.
![Page 5: [IEEE 2004 IEEE International Solid-State Circuits Conference - San Francisco, CA, USA (15-19 Feb. 2004)] 2004 IEEE International Solid-State Circuits Conference (IEEE Cat. No.04CH37519)](https://reader042.fdocument.org/reader042/viewer/2022020609/575082541a28abf34f98d2c2/html5/page/5.jpg)
• 2004 IEEE International Solid-State Circuits Conference 0-7803-8267-6/04 ©2004 IEEE
��������
��� ��� ���
����������
��������
���
����
���� ���� �� � ��!� ��� � ���!�
�"��� ���� �"� � ��!� ���!��"�� �
#$��%�&��������%����'������(��
�������)*�
�
Figure 15.3.2: Fractional error correction based on a time-to-digital converter (TDC).
![Page 6: [IEEE 2004 IEEE International Solid-State Circuits Conference - San Francisco, CA, USA (15-19 Feb. 2004)] 2004 IEEE International Solid-State Circuits Conference (IEEE Cat. No.04CH37519)](https://reader042.fdocument.org/reader042/viewer/2022020609/575082541a28abf34f98d2c2/html5/page/6.jpg)
• 2004 IEEE International Solid-State Circuits Conference 0-7803-8267-6/04 ©2004 IEEE
Figure 15.3.3: Timing of TDC signals.
���+�
����
����
�� �
��!�
��,�
��-�
��.�
��/�
��0�
���
����
���)�+� ++����++++
-��������
�����������
![Page 7: [IEEE 2004 IEEE International Solid-State Circuits Conference - San Francisco, CA, USA (15-19 Feb. 2004)] 2004 IEEE International Solid-State Circuits Conference (IEEE Cat. No.04CH37519)](https://reader042.fdocument.org/reader042/viewer/2022020609/575082541a28abf34f98d2c2/html5/page/7.jpg)
• 2004 IEEE International Solid-State Circuits Conference 0-7803-8267-6/04 ©2004 IEEE
Figure 15.3.4: Near-class-E RF power amplifier with digitally-controlled amplitude regulation (half-circuit).
![Page 8: [IEEE 2004 IEEE International Solid-State Circuits Conference - San Francisco, CA, USA (15-19 Feb. 2004)] 2004 IEEE International Solid-State Circuits Conference (IEEE Cat. No.04CH37519)](https://reader042.fdocument.org/reader042/viewer/2022020609/575082541a28abf34f98d2c2/html5/page/8.jpg)
• 2004 IEEE International Solid-State Circuits Conference 0-7803-8267-6/04 ©2004 IEEE
Figure 15.3.5: Close-in spectrum of an unmodulated RF carrier at 2440MHz.
![Page 9: [IEEE 2004 IEEE International Solid-State Circuits Conference - San Francisco, CA, USA (15-19 Feb. 2004)] 2004 IEEE International Solid-State Circuits Conference (IEEE Cat. No.04CH37519)](https://reader042.fdocument.org/reader042/viewer/2022020609/575082541a28abf34f98d2c2/html5/page/9.jpg)
• 2004 IEEE International Solid-State Circuits Conference 0-7803-8267-6/04 ©2004 IEEE
Figure 15.3.6: Measured Bluetooth TX spectrum and eye-diagram using Rohde&Schwarz (R&S) FSIQ-7 signal analyzer.
![Page 10: [IEEE 2004 IEEE International Solid-State Circuits Conference - San Francisco, CA, USA (15-19 Feb. 2004)] 2004 IEEE International Solid-State Circuits Conference (IEEE Cat. No.04CH37519)](https://reader042.fdocument.org/reader042/viewer/2022020609/575082541a28abf34f98d2c2/html5/page/10.jpg)
• 2004 IEEE International Solid-State Circuits Conference 0-7803-8267-6/04 ©2004 IEEE
Figure 15.3.7: Die micrograph of the single-chip Bluetooth radio.