High-Gain Observers in Nonlinear Feedback Control Lecture ... · the HGO (8) can be linear or...
35
High-Gain Observers in Nonlinear Feedback Control Lecture # 5 Sampled-Data Control High-Gain ObserversinNonlinear Feedback ControlLecture # 5Sampled-Data Control – p. 1/?
Transcript of High-Gain Observers in Nonlinear Feedback Control Lecture ... · the HGO (8) can be linear or...

High-Gain Observersin
Nonlinear Feedback Control
Lecture # 5Sampled-Data Control
High-Gain ObserversinNonlinear Feedback ControlLecture # 5Sampled-Data Control – p. 1/??

Problem Setup
Consider a nonlinear system represented by
x = Ax+Bφ(x, z, u)
z = ψ(x, z, u)
y = Cx, ζ = Θ(x, z)
u ∈ R is the control input, y ∈ R and ζ ∈ Rm aremeasured outputs, and x ∈ Rr and z ∈ Rl are the states
A =
0 1 . . . . . . 0
0 0 1 . . . 0
......
0 . . . . . . 0 1
0 . . . . . . . . . 0
, B =
0
0
...
0
1
, C =
[
1 0 . . . . . . 0
]
High-Gain ObserversinNonlinear Feedback ControlLecture # 5Sampled-Data Control – p. 2/??

Assumption: φ, ψ, Θ are locally Lipschitz;φ(0, 0, 0) = 0, ψ(0, 0, 0) = 0, Θ(0, 0) = 0
Partial State Feedback:
u = γ(x, ζ)
stabilizes the origin of the closed-loop system
χ = F (χ, γ(x, ζ))
χ =
[
x
z
]
, F (χ, u) =
[
Ax+Bφ(x, z, u)
ψ(x, z, u)
]
γ(0, 0) = 0; γ is locally Lipschitz and globally bounded in x
High-Gain ObserversinNonlinear Feedback ControlLecture # 5Sampled-Data Control – p. 3/??

Output Feedback Control:
u = γ(x, ζ)
˙x = Ax+Bφo(x, ζ, u) +H(y − Cx)
HT =
[α1
ε,α2
ε2, · · ·
αr
εr
]
ε is a small positive parameter and αi are chosen such thatthe roots of
sr + α1sr−1 + · · · + αr−1s+ αr = 0
have negative real parts.
High-Gain ObserversinNonlinear Feedback ControlLecture # 5Sampled-Data Control – p. 4/??

We consider a zero-order-hold system with uniformsampling period T . The continuous-time observer isdiscretized and implemented in discrete time as adifference equationTo study the asymptotic behavior as ε and T tend to zero,we restrict their ratio
0 < r1 ≤ ε/T ≤ r2 < ∞
r1 and r2, independent of εThe limit T/ε → 0 would destroy the high-gain property ofthe observerThe limit T/ε → ∞ would destroy the fast samplingproperty and may lead to instability of the discretizedobserver
T = αε, r1 ≤ α ≤ r2
High-Gain ObserversinNonlinear Feedback ControlLecture # 5Sampled-Data Control – p. 5/27

To avoid inherent ill-conditioning of the observer when ε isvery small, apply the scaling
ϕ = Dx, D = diag [1, ε, . . . , εr−1]
ϕ = 1ε[Aoϕ+Hoy + εrBφo(x, ζ, u)]
x = D−1ϕ
Ao = A−HoC, HTo =
[
α1 α2 . . . . . . αr
]
Ao is Hurwitz
High-Gain ObserversinNonlinear Feedback ControlLecture # 5Sampled-Data Control – p. 6/??

Linear Observer (φ0 = 0)
The observer can be descretized by an one of severalavailable methods to arrive at the discrete-time model
q(k + 1) = Adq(k) +Bdy(k)
x(k) = D−1[Cdq(k) +Ddy(k)]
where {Ad, Bd, Cd, Dd} depend on the discretizationmethod. The matrices for the Forward Difference (FD),Backward Difference (BD) and Bilinear Transformation (BT)methods are shown in the following table. The state q is ϕin the FD method, but different in the other two cases.
High-Gain ObserversinNonlinear Feedback ControlLecture # 5Sampled-Data Control – p. 7/??

FD BD BT
Ad (I + αAo) (I − αAo)−1
︸ ︷︷ ︸
M1
(I +α
2Ao)(I −
α
2Ao)
−1
︸ ︷︷ ︸
N2M2
Bd αHo αM1Ho αM2Ho
Cd I M1 M2
Dd 0 αM1Hoα2M2Ho
In the case of the FD method, we assume that α is chosensuch that the eigenvalues of Ad are in the interior of the unitcircle. For the other two methods, this condition holds forany choice of α
High-Gain ObserversinNonlinear Feedback ControlLecture # 5Sampled-Data Control – p. 8/??

Nonlinear Observer (φ0 6= 0)
The observer is discretized using the Forward Differencemethod, to obtain
q(k + 1) = Adq(k) +Bdy(k) + αεrBφo(x(k), ζ(k), u(k))
x(k) = D−1Cdq(k)
where Ad, Bd, and Cd are given in the FD column of Table
High-Gain ObserversinNonlinear Feedback ControlLecture # 5Sampled-Data Control – p. 9/??

Closed-loop Analysis
The plant dynamics are given by
χ = F (χ, u)
The solution of over [kT, (k + 1)T ] is given by
χ(t) = χ(k) + (t− kT )F (χ(k), u(k))
+∫ tkT [F (χ(τ ), u(k)) − F (χ(k), u(k))] dτ
By the Lipschitz property of F and the Gronwall-Bellmaninequality
‖χ(t) − χ(k)‖ ≤ 1L1
[
e(t−kT )L1 − 1]
‖F (χ(k), u(k))‖
∀ t ∈ [kT, kT + T ]
High-Gain ObserversinNonlinear Feedback ControlLecture # 5Sampled-Data Control – p. 10/??

χ(k + 1) = χ(k) + εαF (χ(k), u(k)) + ε2Φ(χ(k), u(k), ε)
where Φ is locally Lipschitz in (χ, u) and uniformly boundedin ε, for sufficiently small ε
x = Ax+Bφ(X , u)
x(k + 1) = eATx(k) +∫ T0 eAtBdtφ(X (k), u(k))
+ εr+1D−1R(X (k), u(k), ε)
η1 =x1 − x1
εr−1, . . . , ηr−1 =
xr−1 − xr−1
ε, ηr = xr − xr
η =1
εr−1D(x− x), D = diag [1, ε, . . . , εr−1]
High-Gain ObserversinNonlinear Feedback ControlLecture # 5Sampled-Data Control – p. 11/??

η =1
εr−1D(x− Cdq −DdCx)
η(k + 1) = Afη(k) +1
εr−1MDx(k) + ε[·]
Af = CdAdC−1d
M = (I −DdC)eAα −Af (I −DdC) − CdBdC
MD =
{
O(ε2) for the FD and BD methodsO(ε3) for the BT method
(1/εr−1)MD will have negative powers of ε for large r
High-Gain ObserversinNonlinear Feedback ControlLecture # 5Sampled-Data Control – p. 12/??

ξ = η −1
εr−1LDx
ξ(k + 1) = η(k + 1) −1
εr−1LDx(k + 1)
= Af [ξ(k) +1
εr−1LDx(k)]
−1
εr−1MDx(k) + ε[·]
−1
εr−1LD
[
eATx(k) +
∫ T
0eAtBdtφ
]
+ε2LR
High-Gain ObserversinNonlinear Feedback ControlLecture # 5Sampled-Data Control – p. 13/??

DeAT = eAαD, DeAtB = εr−1eAt/εB
These properties follow from
eAt =
r−1∑
k=1
tk
k!Ak, εDA = AD, DB = εr−1B
ξ(k+1) = Afξ(k)+1
εr−1[AfL+M −LeAα]Dx(k)+ · · ·
Choose L to satisfy the equation
AfL+M − LeAα = 0
High-Gain ObserversinNonlinear Feedback ControlLecture # 5Sampled-Data Control – p. 14/??

ξ =1
εr−1[(I − L−DdC)Dx− Cd q]
The closed-loop sampled-data system can be representedat the sampling points by the discrete-time model
χ(k + 1) = χ(k) + εαF (χ(k), u(k)) + ε2Φ(χ(k), u(k), ε)
ξ(k + 1) = Afξ(k) + εΓ(χ(k), u(k), x(k), ε)
u(k) = γ(x(k), ζ(k))
x(k) = [I − εN2(ε)]x(k) +N1(ε)ξ(k)
where F,Φ, γ,Γ are locally Lipschitz; Φ,Γ are uniformlybounded in ε, for sufficiently small ε; γ,Γ are globallybounded in x; the matrices N1,N2 are analytic functions ofε
High-Gain ObserversinNonlinear Feedback ControlLecture # 5Sampled-Data Control – p. 15/??

Separation Principle
Theorem: Let R be the region of attraction ofχ = F (χ, γ(x, ζ)), S be any compact set in the interior ofR, Q be any compact subset of Rr, and suppose χ(0) ∈ Sand x(0) ∈ Q. Then
there exists ε∗1 > 0 such that for every ε ∈ (0, ε∗
1], thesolutions (χ(k), ξ(k)) of the closed-loop systems arebounded for all k ≥ 0, and χ(t) is bounded for all t ≥ 0;
given any τ1 > 0, there exist ε∗2, T1 and an integer k∗
(all dependent on τ1) such that, for every ε ∈ (0, ε∗2],
‖ξ(k)‖ ≤ τ1, ∀ k ≥ k∗, ‖χ(t)‖ ≤ τ1, ∀ t ≥ T1
High-Gain ObserversinNonlinear Feedback ControlLecture # 5Sampled-Data Control – p. 16/??

given any τ2 > 0, there exists ε∗3 > 0 such that, for
every ε ∈ (0, ε∗3],
‖χ(t) − χs(t)‖ ≤ τ2, ∀ t ≥ 0
where χs(t) is the solution of χ = F (χ, γ(x, ζ)) withχs(0) = χ(0)
if the origin of χ = F (χ, γ(x, ζ)) is exponentially stableand the functions F and γ are continuouslydifferentiable in the neighborhood of the origin, thenthere exists ε∗
4 > 0 such that for every ε ∈ (0, ε∗4], the
origin of the (discrete-time) closed-loop system isexponentially stable and S × Q is a subset of its regionof attraction in the (χ, x) space.
High-Gain ObserversinNonlinear Feedback ControlLecture # 5Sampled-Data Control – p. 17/??

The Pendubot Experiment
High-Gain ObserversinNonlinear Feedback ControlLecture # 5Sampled-Data Control – p. 18/??

1714 IEEE TRANSACTIONS ON AUTOMATIC CONTROL, VOL. 46, NO. 11, NOVEMBER 2001
TABLE ICOEFFICIENT OF THEDISCRETE-TIME IMPLEMENTATION OF THE HGO
has coefficients, the assumption that is glob-ally bounded in guarantees that will be bounded on com-pact sets of uniformly in . For comparison, note thatsome right-hand side coefficients of (6) are . The so-lution of (8) does not exhibit peaking for small, which makesit easier to discretize the equation. The effect of peaking is nowcontained in the output equation and is overcomeby the fact that enters all equations through functions whichare globally bounded in.
Depending on whether or not the nominal functionis zero,the HGO (8) can be linear or nonlinear. Linear observers can bediscretized using different methods. We consider the forwarddifference (FD), backward difference (BD) and bilinear trans-formation (BT) methods. For the nonlinear case, we use the FDmethod.
Linear HGO: The linear high-gain observer is a special caseof the general form (8) when . It is implemented indiscrete time by
where and depend on the discretizationmethods, as shown in Table I.
Nonlinear HGO: When , we discretize the nonlinearobserver (8) using the FD method, to obtain
where , and are given in the FD column of Table I.In the case of the FD method, we assume thatis small
enough to ensure that has eigenvalues insidethe unit circle. For the other two methods, this condition holdsfor any choice of .
B. Discrete-Time Closed-Loop Model
To analyze the closed-loop system, we derive a discrete timemodel that describes the state variables at the sampling points.A key step in deriving our closed-loop model is the represen-tation of the system in a two-time-scale form that reflects thefact that the observer dynamics are faster than the plant dy-
TABLE IIMD,D ED AND D EMD IN TERMS OFX = �(1=�)D A D
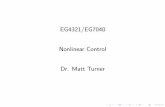
Fig. 1. The pendubot.
namics.2 As in continuous-time analysis [1], arriving at the de-sired two-time-scale form requires replacing the observer statesby scaled estimation errors. Unlike the continuous-time case,however, this change of variable by itself may not be sufficientand we may have to perform an additional change of variablesto weaken the slow input into the fast equation.
To descretize the plant dynamics, we rewrite (1) and (2) as
(11)
where
The solution of (11) over the sampling period isgiven by
Using the Lipschitz property of and the Gronwall–Bellmaninequality, it can be shown that
(12)
where is a Lipschitz constant of with respect to . Hence
(13)
where is locally Lipschitz in and uniformly boundedin , for sufficiently small . This model and inequality (12)
2For background on two-time-scale discrete-time systems, see [10], [16],[19], and the references therein.

M(q)q + C(q, q)q + g(q) = τ
q =
[
q1
q2
]
, τ =
[
τ
0
]
M is positive definite
q = [M(q)]−1[−C(q, q)q − g(q) + τ ]
x1 = q1, x2 = q1, x3 = q2, x4 = q2
q1 and q2 are measured by optical encoders. The opticalencoder resolution is 1250 pulse/revolution; hence, themaximum deviation is 360/1250 = 0.288 deg
The input voltage saturates at ±10 V
High-Gain ObserversinNonlinear Feedback ControlLecture # 5Sampled-Data Control – p. 19/??

The manufacturer’s strategy to invert the pendulum
The Control Strategy is divided into two parts, a balancingcontrol that balances the pendubot about its equilibriumconfiguration and a swinging control that swings thependubot up from the downward configuration to theinverted configuration. There is switching from the swingingcontrol to the balancing control when the pendulum is closeenough to its equilibrium configuration
Speed Estimation Strategy; The manufacturer uses anEuler formula to compute q from q. There is also an“averaged Euler” formula where the last three readings ofthe position are averaged
High-Gain ObserversinNonlinear Feedback ControlLecture # 5Sampled-Data Control – p. 20/??

In an earlier work (Dabroom and Khalil (1999)) it was shownthat the Euler method (the most commonly used method forspeed estimation from optical encoders) is a special case ofa reduced-order high-gain observer discretized using theforward difference method with T/ε = 1This is just one of many options we have when we use ahigh-gain observer
Reduced-order versus full-order
The observer eigenvalues
Linear (φ0 = 0) versus nonlinear (φo 6= 0)
The ratio T/ε
The discretization method
High-Gain ObserversinNonlinear Feedback ControlLecture # 5Sampled-Data Control – p. 21/??

Our experiment:
Keep the manufacturer’s control strategy
Replace the manufacturer’s speed estimation strategywith a high-gain observer
Guided by the earlier work (Dabroom and Khalil (1999)),the observer eigenvaues are chosen as multipleeigenvalues at −1/ε and, for linear observers, the bilineartransformation method is used for discretization
High-Gain ObserversinNonlinear Feedback ControlLecture # 5Sampled-Data Control – p. 22/??

Peaking and Saturation: This part of the experiment studiesthe effect of peaking. As ε is decreased, the peaking effectincreases. The parameter ε is decreased by fixing T andincreasing α = T/ε
We start by choosing x(0) = x(0). This is a case of nopeaking since peaking is induced by the differencex(0) − x(0). Fig. 2 shows that increasing α does notchange the starting level of x2 and Fig. 3 shows that thecontrol magnitude is less than 3 V at the starting point
High-Gain ObserversinNonlinear Feedback ControlLecture # 5Sampled-Data Control – p. 23/??

DABROOM AND KHALIL: OUTPUT FEEDBACK SAMPLED-DATA CONTROL 1715
Fig. 2. The transient of estimating speed of the first link as� increases whileT = 0:01.
are sufficient to characterize the plant dynamics. However, todevelop a model that describes the dynamics of the estimationerror, we need a more detailed model of the statethat makesuse of the special structure of (1) and the properties of the ma-trices and . Toward that end, we write the solution of (1)as
where .Using (10), we have
(14)
Hence
Using the Lipschitz property of and (12), it can be shown thatthe integral term on the right-hand side of the foregoing equationis . Therefore, can be modeled by
(15)
where is locally Lipschitz in and uniformly boundedin , for sufficiently small .
To represent the observer dynamics, we replace the observerstate by the scaled estimation error
to obtain
where
For linear observers, . The matrix is for the FDand BD methods, and for the BT method. Hence, it

1716 IEEE TRANSACTIONS ON AUTOMATIC CONTROL, VOL. 46, NO. 11, NOVEMBER 2001
Fig. 3. The control during the transient period as� increases whileT = 0:01.
is independent of and its eigenvalues are inside the unit circle.The product and the matrix areindependent of . Using (14), it can be shown that
Moreover, using
(16)
we can rewrite as
where is independent of. Therefore, the state equation forcan be rewritten as
(17)
where inherits the properties of and . Expressions forfor the three discretization methods are given in Table II. Fromthese expressions, it can be verified that is for theFD and BD methods and for the BT method. Hence, theterm will have negative powers offor large .We eliminate this term by the change of variables
where satisfies
(18)
Using (16), (18) reduces to
(19)
Using the property , it can be verified that (19) has theclosed-form solution
(20)
where and is independent of. Using (14)and (16), the state equation foris
The state estimate is given by
where is an analytic function of . Thecoefficient is given by

Next, we choose x(0) = 0 6= x(0). Fig. 4 shows thatincreasing α increases the peaking level in x2. This affectsthe control magnitude by bringing more oscillation duringthe transient period as shown in Fig. 5. Notice that thecontrol is saturated at the device limit (|u| ≤ 10 V), while inthe no-peaking case the control signal satisfies |u| ≤ 3 V
With large peaking, the control strategy fails to bring thependulum arm to the balancing region. This puts a limit onhow small ε could be. For example, if α = 4, we cannotreduce T beyond 0.006 s. This is contrasted with the nopeaking case [when x(0) = x(0)] where T can be reducedto 0.003 s.
High-Gain ObserversinNonlinear Feedback ControlLecture # 5Sampled-Data Control – p. 24/??

DABROOM AND KHALIL: OUTPUT FEEDBACK SAMPLED-DATA CONTROL 1717
Fig. 4. Peaking in the transient of estimating speed of the first link as� increases whileT = 0:01.
Table II gives expressions for and for thethree discretization methods. From these expressions and
......
it can be verified that is .In summary, the closed-loop sampled-data system can be rep-
resented at the sampling points by a discrete-time model in thetwo-time-scale form
(21)
(22)
(23)
(24)
where the functions , , , are locally Lipschitz in theirarguments, the functions, are uniformly bounded in, forsufficiently small , the functions , are globally bounded in
, and the matrices , are analytic functions of.
IV. PERFORMANCERECOVERY
The output feedback sampled-data controllerrecovers the performance of the state feedback
continuous-time controller for suffi-ciently small . The performance recovery is summarized inthe following two theorems. The first theorem shows that ifis the region of attraction under state feedback, then for anycompact set in the interior of and any compact set ,the trajectories of the sampled-data, closed-loop system underoutput feedback, starting at and ,3 staybounded for all future time and come arbitrarily close to theorigin as time progresses. Moreover, converges to ,the solution of the continuous-time, closed-loop system understate feedback
(25)
with , as , uniformly in for all .The second theorem deals with the case when the origin of (25)is exponentially stable and shows that the origin of (21)–(24)is exponentially stable for sufficiently smalland is asubset of its region of attraction.
Theorem 1: Let Assumptions 1–3 hold; then
• there exists such that for every , thetrajectories of (21)–(24) starting atand are bounded for all . Moreover,is bounded for all ;
3The theorems remain valid if instead ofx(0) 2 Q we requireq(0) 2 Q.

1718 IEEE TRANSACTIONS ON AUTOMATIC CONTROL, VOL. 46, NO. 11, NOVEMBER 2001
Fig. 5. The effect of the peaking on the control during the transient period as� increases whileT = 0:01.
• given any , there exist and an integer (alldependent on) such that, for every
• given any , there exists such that, for every
Proof: See Appendix A.Theorem 2: Let Assumptions 1–3 hold and the vector field
be continuously differentiable around the origin. Assumethe origin of the closed-loop system under state feedback (25)is exponentially stable. Then, there exists such that forevery , the origin of (21)–(24) is exponentially stableand is a subset of its region of attraction in thespace.
Proof: See Appendix B.
V. APPLICATION TO THEPENDUBOT
We illustrate the discrete time implementation of thehigh-gain observer by application to the pendubot.
A. What Is The Pendubot?
The pendubot (Pendulum Robot) is an electromechanicalsystem consisting of two rigid links interconnected by revolutejoints. The first joint is actuated by a dc motor while the second
joint is unactuated as a simple pendulum. Fig. 1 shows one ofthe equilibrium configurations of the pendubot. This structureis similar in spirit to the classical inverted pendulum on a cart.However, the dynamic coupling between the two links of thependubot results in some interesting properties not found in theinverted pendulum. The (Euler–Lagrange) equation of motionis [21]
(26)
where
Using the fact that is nonsingular, the equation of mo-tion can be written as
The pendubot control strategy developed in [3] and [17]is divided into two parts, a balancing part which balancesthe pendubot about one of its equilibrium configurations anda swinging control that swings the pendubot up from thedownward configuration to the inverted configuration.

Linear Versus Nonlinear Observers: Many runs were madeof the two cases. The two observers act almost the sameand this could be because of uncertainty in the modelparameters
High-Gain ObserversinNonlinear Feedback ControlLecture # 5Sampled-Data Control – p. 25/??

Comparison Between High-Gain Observer and EulerMethod: Fig. 7 compares the operation range for differentdiscretization methods of the high-gain observer and for theEuler method, with and without averaging. By operationrange we mean how large the sampling period can bebefore the controller fails to balance the pendulum. Thisfigure shows that the use of the reduced order high-gainobserver results in larger operating range. The Eulerformula fails for T > 0.04 s.
High-Gain ObserversinNonlinear Feedback ControlLecture # 5Sampled-Data Control – p. 26/??

1720 IEEE TRANSACTIONS ON AUTOMATIC CONTROL, VOL. 46, NO. 11, NOVEMBER 2001
Fig. 7. Comparison of the different discretization methods of the full order (FOHG) and reduced order (ROHG) with the Euler formula with and without averaging.
The HGO is discretized with sampling period . Theparameter can be made small by either fixingand increasing
, or fixing and decreasing .The optical encoder resolution adds noise to the position mea-
surement. The noise magnitude depends on the number of pulsesper revolution; the higher the number of pulses, the smaller thenoise magnitude. In our case, the optical encoder resolution is1250 pulse/revolution; hence, the maximum deviation for eachlink is 360/1250 0.288 .
The pendubot starts at its only stable equilibrium point. The state estimates can start from
the same initial conditions of the pendubot, which are known inthis case, or with the default zero initial conditions. Choosingthe initial conditions of the observer at the default values bringsin peaking during the transient period. This phenomenon couldderive the pendubot to instability and saturation is used to limitthe effect of peaking. The manufacturer saturates the inputvoltage at 10 V. We had to reduce this limit in the case ofpeaking to get the pendubot to the balancing position. Thesaturation level depends on the sampling periodin suchway that if is large the default saturation level is enough;otherwise we need to reduce the saturation level.
The high-gain observer poles are located at . Weuse the bilinear transformation method for the discretization ofthe HGO. These choices are guided by our earlier work [6]. Nowwe are going to discuss the following points:
1) saturation as a tool to overcome peaking;2) effect of decreasing on the steady-state error;3) linear versus nonlinear HGO;
4) how large the sampling period can be for different HGOdiscretizations and for the Euler method, with and withoutaveraging.
1) Peaking and Saturation:This part of the experimentstudies the effect of peaking. Asis decreased, the peakingeffect increases. The parameteris decreased by fixing andincreasing .4 We start by choosing .This is a case of no peaking since peaking is induced by thedifference . Fig. 2 shows that increasingdoesn’tchange the starting level of , and Fig. 3 shows the controlmagnitude which, in all cases, is less than 3 V at the startingpoint.
Next, we choose . Fig. 4 shows that in-creasing increases the peaking level in . This affects thecontrol magnitude by bringing more oscillation during the tran-sient period as shown in Fig. 5. Notice that the control is satu-rated at the device limit, i.e., V, while in the no-peakingcase the control signal is V.
With large peaking, the balancing control fails to bring thependulum arm to the balancing region. This puts a limit on howsmall could be. For example, if we cannot reduce
beyond 0.006 s. This is contrasted with the no peaking case[when ] where can be reduced to 0.003 s. Smallervalues of result in smaller steady-state errors.
2) Steady-State Error:In this part of the experiment westudy the effect of decreasingon the steady-state trackingerror. As the bandwidth of the HGO increases with decreasing
4See [7] for similar results when" is decreased by decreasingT while � isfixed.

Fig. 8 show that for larger sampling periods areduced-order high-gain observer, discretized by thebilinear transformation method, outperforms the Eulermethod for the same sampling period T = 0.04 s. Even ifwe discretize the high-gain observer with T = 0.06 s andcompare the Euler method at T = 0.04 s , we find that thehigh-gain observer outperforms the Euler method
High-Gain ObserversinNonlinear Feedback ControlLecture # 5Sampled-Data Control – p. 27/??

DABROOM AND KHALIL: OUTPUT FEEDBACK SAMPLED-DATA CONTROL 1721
Fig. 8. Comparing the performance of the reduced order HGO discretized by bilinear method for� = 2 andT = 0:04 and� = 6:5 andT = 0:06 with theEuler method whenT = 0:04 s.
, the presence of noise may lead to complete or partial dis-tortion of the estimates, depending on the signal to noise ratio[6]. Fig. 6 shows the effect of increasingwhens. Increasing reduces the transient time. We can obtain thesame result by fixing and decreasing [7]. This is inagreement with Theorem 1.
3) Linear Versus Nonlinear HGO:To study linear versusnonlinear HGOs, many runs were made of the two cases. Thetwo observers act almost the same and this could be becauseof uncertainty in the model parameters. Reference [1] reportsan improvement with the nonlinear observer when the model isknown.
4) Comparison Between HGO and Euler Method:It isshown in [6] that the Euler method (the most commonly usedmethod for speed estimation from optical encoders) is a specialcase of a reduced-order high-gain observer discretized usingthe forward difference method with . This is justone of many options we have when we address the problemas a high-gain observer design. We can choose betweenreduced-order and full-order observers. Within each type, wehave the flexibility of choosing several design parameters, mostimportant of which is the ratio . We also have the freedomto use different discretization methods. We have exploredmany of these options in [6]. We explore some of them here,as applied to the pendubot, and compare the results with thoseobtained using the Euler method and a variant of it.
The pendubot manufacturer provides an averaged Euler for-mula to estimate the speed of the links, where the last three read-
ings of the position are averaged. Fig. 7 compares the operationrange for the different discretization methods of the high-gainobservers and the Euler method, with and without averaging.By operation range we mean how large the sampling periodcan be before the controller fails to balance the pendulum. Thisfigure shows that the use of the reduced order high-gain ob-server results in larger operating range. The Euler formula failsfor s. Fig. 8 show that for larger sampling periods thehigh-gain observer outperforms the Euler method for the samesampling period s. Even if we discretize the HGOwith and compare its performance with the Euler for-mula when , the reduced order HGO outperforms theEuler formula. Fig. 7 shows also that the Euler method with av-eraging can not work for .
VI. CONCLUSION
In this paper, we have studied sampled-data control ofnonlinear systems using high-gain observers, designed in con-tinuous time. Closed-loop analysis shows that the sampled-datacontroller recovers the performance of the continuous-timecontroller as the sampling frequency and the observer gainbecome sufficiently large. We illustrate the discrete-timeimplementation of the high-gain observer by application tothe pendubot. We show how saturation is used to overcomepeaking and the effect of decreasingon the steady-stateerror. Finally, we show that the high-gain observer outperformsvelocity calculation using Euler’s method.

3
if the closed-loop system under sampled-data state feedback is exponentially stable, then the
trajectories of the closed-loop multirate output feedbacksystem will exponentially converge to
the origin.
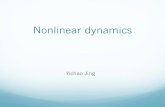
One area of application that may benefit from a multirate control scheme is the case of systems
that employ computationally demanding controllers where the control update rate is dictated by
the state feedback design. As an example we consider the control of smart material actuated
systems that use hysteresis inversion algorithms [30]. In addition to hysteresis, difficulty in
measuring system states in smart material applications points to output feedback control designs
[10].
fx(nT )
su(kT ) sT
fT
sζ(kT )
ζ(t)
y(t)u(t)
SDController
ZOHsT
DHGO
SystemDynamics
Fig. 1. Diagram of the multirate control scheme showing a sampled-data (SD) controller and discrete-time high-gain
observer (DHGO).
This paper is organized as follows. In Section II we present the class of nonlinear systems under
consideration and derive the closed-loop system under multirate sampled-data output feedback.
Section III provides the analytical results where we study the closed-loop stability of the multirate
output feedback controller in the presence of bounded disturbances, given a sampled-data state
feedback controller that uniformly globally asymptotically stabilizes a set containing the origin.
Section IV applies the multirate control scheme to the control of smart material actuated systems
and Section V provides some experimental results based on multirate output feedback control
of a shape memory alloy actuated rotary joint.