Alister Krouli - Liber Cordis Cincti Serpente Sub Figura Lxv

Figura 2.10: Determinacion de k para par constante
Figura 2.11: Prueba de corriente con carga nominal a Tension variable
y 1 min es 60 s:
k = 0,2481V
rev/min∗ 1rev
2πrad∗ 60s
1min= 2,3692V
rad
s= 2,3692
W
A
rad
s= 2,3692N
m
A(2.29)
De la misma tabla se tiene la relacion entre corriente y voltaje con par constanteque se presenta en la grafica 2.11. Se observa que el rango de operacion normal delmotor es de 10V a 24V.
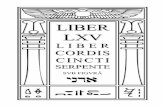
La siguiente prueba determina las caracterısticas del motor sin carga y variando elvoltaje de entrada. Los resultados se consignan en la tabla 2.4. En la figura 2.12 se
22
Tension(V) Corriente(A) Velocidad(rpm)31.64 0.847 14229.9 0.766 13828.02 0.732 130
26 0.714 12124 0.691 11022 0.677 10120 0.685 9018 0.677 8016 0.648 7014 0.634 6112 0.595 5110 0.571 438 0.535 336 0.493 244 0.448 142 0.392 6
Tabla 2.4: Prueba Vacio Variacion de tension
Figura 2.12: Prueba sin carga a Tension variable
muestra una relacion entre voltaje y velocidad angular que se traduce en un coeficientede transformacion de k = 2,009 Nm/A que muestra que el coeficiente puede ser maspequeno si la carga que se tiene en la salida es menor.
En la figura2.13 se observa un comportamiento mas variable de la corriente. A pesarde tener un rango de voltaje en el que la pendiente i vs. v es mas constante, ahora esmas pequeno llegando a estar entre 18 V y 23 V.
23

Figura 2.13: Prueba de corriente vs voltaje sin carga
Figura 2.14: Motor implementado en Solidworks
La prueba final se logra bloqueando el rotor y aumentando el voltaje hasta llegara la corriente nominal. La tension que permite esta corriente es de 2.63 V y para esaconfiguracion el torque resulta ser 2.95 Nm.
Por otro lado, se utilizo SolidWorks para determinar el momento de inercia delmotor suponiendo un peso que no tuviera en cuenta el efecto del estator. El resultadoentregado por el software es de 0.0019 kg*m2 suponiendo el origen en el inicio del eje(ver sistema coordenado dibujado en azul en figura 2.14).
Considerando el caso de no tener carga, la ecuacion de sumatoria de torques resultaser,
0 = Jω + βω (2.30)
⇒ ω(t) = −βJω (2.31)
⇒ ω(t) = ω0e− βJt (2.32)
24

Tiempo de apagado del motor (s)1.82 1.92 1.91 1.82 1.81 2.03 2.04 1.81 1.82 1.95
Tabla 2.5: Prueba Vacio Variacion de tension
Valores nominalesCorriente (A) 2Tension (V) 24Par (Nm) 2,55
Velocidad Angular 9.163 rad/s(87,5 rpm)
R (Ω) 1,12L (mH) 2.47k (Nm
A) 2.5
Temperatura max carcasa (C) 40Momento de inercia (kg*m2) 0.0019
Tabla 2.6: Valores Nominales
Figura 2.15: Rueda
Para determinar el coeficiente que acompana a la t en la ecuacion anterior se fijo unvoltaje que se traduce en una velocidad constante y a partir de un tiempo determinadose desenergiza el circuito y se mide el tiempo que tarda el rotor en llegar a velocidadcero. Se realizaron 10 mediciones que se muestran en la tabla 2.5 y se determino que:
β
J= 1, 893s (2.33)
Con el estimado que se habıa obtenido de J el valor de β puede ser obtenido como
β = (0,0019kg ∗m2) ∗ (1, 893s) = 0, 0035967kg ∗m2 ∗ s (2.34)
El resumen de los valores nominales del motor se presentan en la tabla 2.6.
Estimacion de Parametros de la Rueda
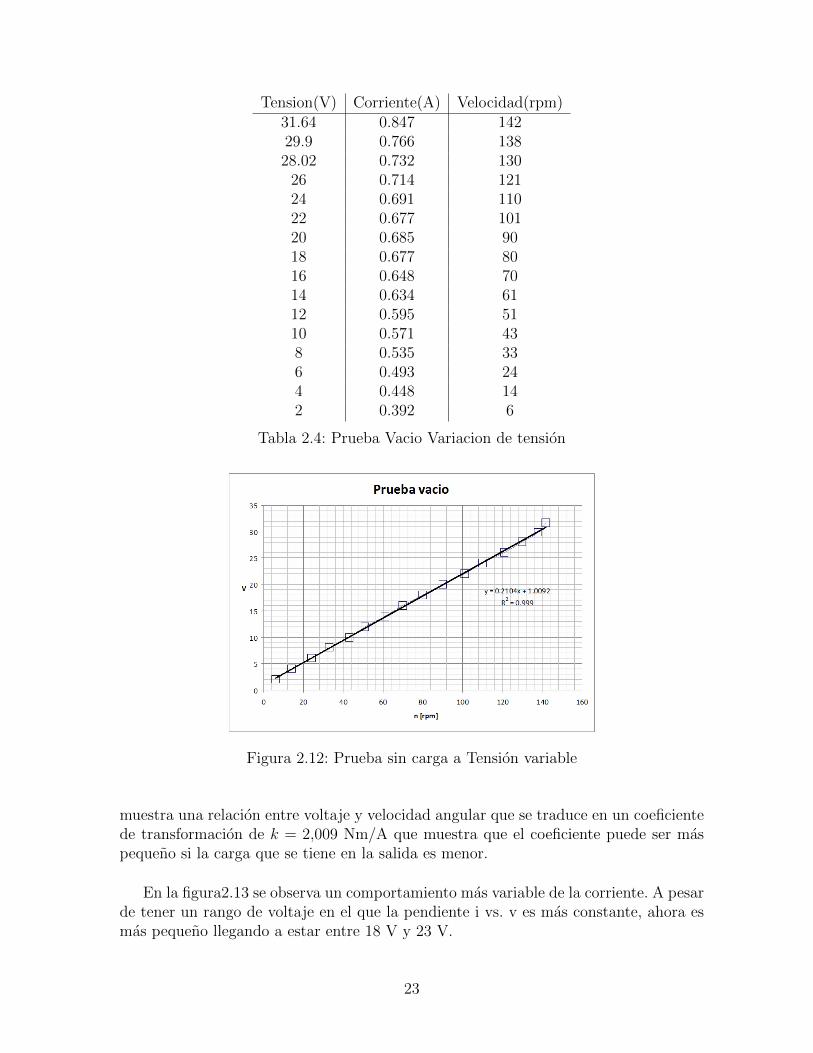
Mediante la implementacion de la rueda en SolidWorks (figura 2.15), y usando lasherramientas de determinacion de caracterısticas fısicas de los montajes que tiene eseprograma, es posible establecer su matriz de inercia (ver figura 2.16).
25
Masa = 0.4142 ki logramos
Volumen = 0.0004 metros ˆ3
Area de s u p e r f i c i e = 0.0460 metros ˆ2
Momentos de i n e r c i a : ( k i logramos ∗ metros ˆ2 )( Medido desde e l cent ro de masa y a l ineado con e l s i s tema de coordenadas
r e s u l t a n t e )Ixx = 0.0009 Ixy = 0.0000 Ixz = 0.0000Iyx = 0.0000 Iyy = 0.0005 Iyz = 0.0000Izx = 0.0000 Izy = 0.0000 I z z = 0.0005
Figura 2.16: Caracterısticas fısicas de la rueda entregadas por SolidWorks
Materiales Coeficientes de friccion entre la rueda y el sueloCoeficiente estatico µe Coeficiente dinamico µd
Caucho con Cemento (humedo) 0,3 0,25Caucho con Cemento (seco) 1 0,8
Tabla 2.7: Coeficientes de Friccion para la Rueda
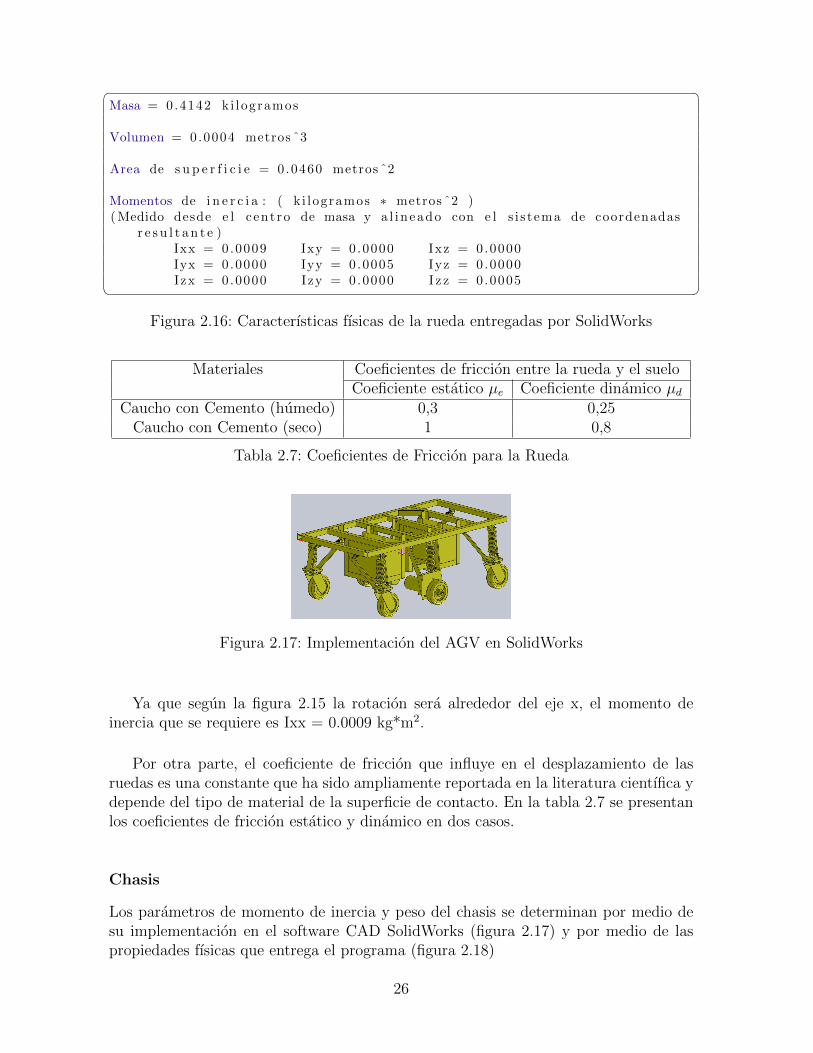
Figura 2.17: Implementacion del AGV en SolidWorks
Ya que segun la figura 2.15 la rotacion sera alrededor del eje x, el momento deinercia que se requiere es Ixx = 0.0009 kg*m2.
Por otra parte, el coeficiente de friccion que influye en el desplazamiento de lasruedas es una constante que ha sido ampliamente reportada en la literatura cientıfica ydepende del tipo de material de la superficie de contacto. En la tabla 2.7 se presentanlos coeficientes de friccion estatico y dinamico en dos casos.
Chasis
Los parametros de momento de inercia y peso del chasis se determinan por medio desu implementacion en el software CAD SolidWorks (figura 2.17) y por medio de laspropiedades fısicas que entrega el programa (figura 2.18)
26

Propiedades f ı s i c a s de AGV solid ( Assembly Conf igurat ion −
Predeterminado )Sistema de coordenadas de s a l i d a : −− predeterminado −−
Masa = 59.0372 ki logramosVolumen = 0.0236 metros ˆ3
Area de s u p e r f i c i e = 3.5480 metros ˆ2
Centro de masa : ( metros )X = 0.2501Y = 0.5015Z = −0.1212
Ejes p r i n c i p a l e s de i n e r c i a y momentos p r i n c i p a l e s de i n e r c i a :( k i logramos ∗ metros ˆ2 )Medido desde e l cent ro de masa .
Ix = (0 . 0031 , 1 .0000 , −0.0040) Px = 1.6160Iy = (−1.0000 , 0 .0031 , 0 .0013) Py = 3.4700I z = (0 . 0013 , 0 .0040 , 1 .0000) Pz = 4.1707
Momentos de i n e r c i a : ( k i logramos ∗ metros ˆ2 )( Medido desde e l cent ro de masa y a l ineado con e l s i s tema de coordenadasr e s u l t a n t e )
Lxx = 3.4699 Lxy = 0.0057 Lxz = −0.0009Lyx = 0.0057 Lyy = 1.6161 Lyz = −0.0102Lzx = −0.0009 Lzy = −0.0102 Lzz = 4.1707
Momentos de i n e r c i a : ( k i logramos ∗ metros ˆ2)Medido desde e l s i s tema de coordenadas de s a l i d a .
Ixx = 19.1884 Ixy = 7.4127 Ixz = −1.7912Iyx = 7.4127 Iyy = 6.1779 Iyz = −3.5996Izx = −1.7912 Izy = −3.5996 I z z = 22.7159
Figura 2.18: Caracterısticas fısicas del chasis entregadas por SolidWorks
2.3 Implementacion mediante Matlab
La plataforma de trabajo Matlab posee una herramienta en Simulink que permite in-cluir facilmente ecuaciones diferenciales; esta es el Editor de Ecuaciones Diferenciales.Por medio de este editor se implemento el modelo obtenido matematicamente en laseccion anterior.
En la figura 2.19 se puede ver que se tienen siete las variables de estado inicializadasen cero, dos entradas, que corresponden a los voltajes de los motores y siete salidas,que corresponden a la posicion, orientacion, velocidades y corrientes, de suerte que sepuede observar el comportamiento del sistema con respecto a estas variables.
Esta implementacion corresponde a un bloque con dos entradas y siete salidas, comoel que se muestra en la figura 2.20, el cual se utilizara en las secciones siguientes.
27
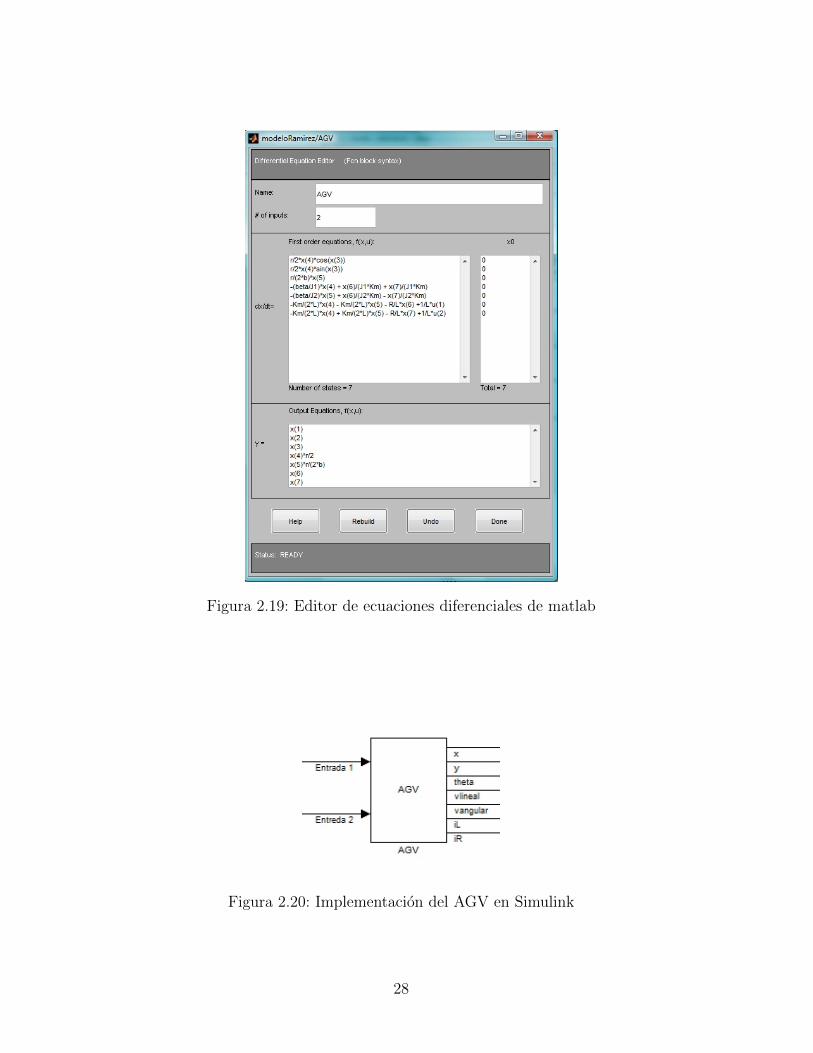
Figura 2.19: Editor de ecuaciones diferenciales de matlab
Figura 2.20: Implementacion del AGV en Simulink
28
2.4 Implementacion mediante Modelica
El estandar de simulacion Modelica tiene un gran potencial en la construccion de mo-delos a partir de componentes basicos que incorporan sus ecuaciones para llevar a unmodelo general que incluya el mayor numero de efectos posible. El AGV puede servisto como un sistema que involucra 3 subsistemas: ruedas, motor y chasis.
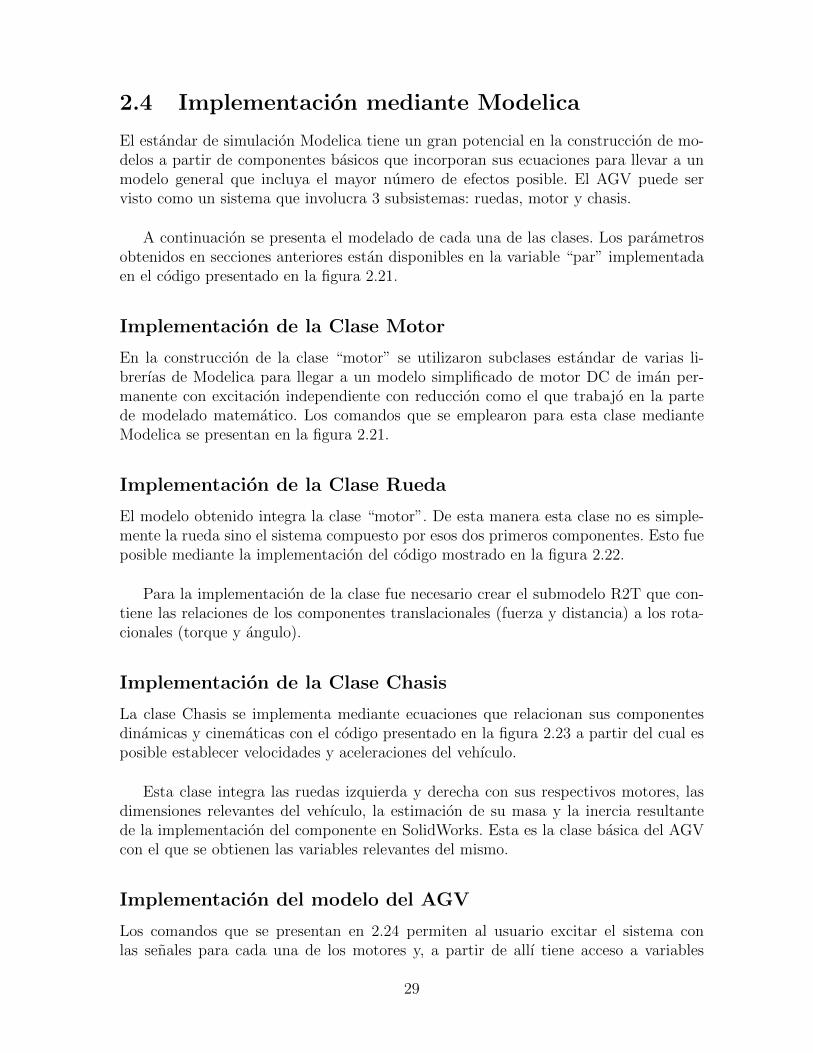
A continuacion se presenta el modelado de cada una de las clases. Los parametrosobtenidos en secciones anteriores estan disponibles en la variable “par” implementadaen el codigo presentado en la figura 2.21.
Implementacion de la Clase Motor
En la construccion de la clase “motor” se utilizaron subclases estandar de varias li-brerıas de Modelica para llegar a un modelo simplificado de motor DC de iman per-manente con excitacion independiente con reduccion como el que trabajo en la partede modelado matematico. Los comandos que se emplearon para esta clase medianteModelica se presentan en la figura 2.21.
Implementacion de la Clase Rueda
El modelo obtenido integra la clase “motor”. De esta manera esta clase no es simple-mente la rueda sino el sistema compuesto por esos dos primeros componentes. Esto fueposible mediante la implementacion del codigo mostrado en la figura 2.22.
Para la implementacion de la clase fue necesario crear el submodelo R2T que con-tiene las relaciones de los componentes translacionales (fuerza y distancia) a los rota-cionales (torque y angulo).
Implementacion de la Clase Chasis
La clase Chasis se implementa mediante ecuaciones que relacionan sus componentesdinamicas y cinematicas con el codigo presentado en la figura 2.23 a partir del cual esposible establecer velocidades y aceleraciones del vehıculo.
Esta clase integra las ruedas izquierda y derecha con sus respectivos motores, lasdimensiones relevantes del vehıculo, la estimacion de su masa y la inercia resultantede la implementacion del componente en SolidWorks. Esta es la clase basica del AGVcon el que se obtienen las variables relevantes del mismo.
Implementacion del modelo del AGV
Los comandos que se presentan en 2.24 permiten al usuario excitar el sistema conlas senales para cada una de los motores y, a partir de allı tiene acceso a variables
29
File 2.1: motor.mo package Pruebas
record parametrosparameter Real MotorR=1.12;parameter Real MotorL =0.00247;parameter Real MotorK=2.3692/10;parameter Real MotorJ =0.0019;parameter Real MotorReduce=10;parameter Real WheelRadio =0.1 ;parameter Real WheelM=0.1;parameter Real WheelJ =0.001;parameter Real WheelD=0.01;parameter Real WheelFricc ion =10;parameter Real ChassisM =60;parameter Real ChassisMCarga =10;parameter Real Chass isSemiEje =0.25;parameter Real Chass i sJ =4.17;parameter Real ChassisBrazoCarga =0.0 ;parameter Real ChassisKResorte=1e8 ;
end parametros ;
c l a s s MotorDCparametros par ;Modelica . E l e c t r i c a l . Analog . I n t e r f a c e s . Pos i t i v eP in p ;Modelica . E l e c t r i c a l . Analog . I n t e r f a c e s . NegativePin n ;Modelica . E l e c t r i c a l . Analog . I d e a l . Idea lDiode D;Modelica . E l e c t r i c a l . Analog . Bas ic . R e s i s t o r R(R=par . MotorR) ;Modelica . E l e c t r i c a l . Analog . Bas ic . Inductor L(L=par . MotorL ) ;Modelica . E l e c t r i c a l . Analog . Bas ic .EMF E( k=par . MotorK) ;Modelica . E l e c t r i c a l . Analog . Bas ic . Ground gnd ;Modelica . Mechanics . Rotat iona l . Components . I n e r t i a J ( J=par . MotorJ ) ;Modelica . Mechanics . Rotat iona l . I n t e r f a c e s . Flange b f l a n g e b ;Modelica . Mechanics . Rotat iona l . Components . Idea lGear Reductor ( r a t i o=par
. MotorReduce ) ;Real power , energy ( s t a r t =0) ;
equat ionder ( energy )=power ;power=p . v∗R. i ;connect (p ,D. p) ;connect (D. n ,R. p) ;connect (R. n , L . p) ;connect (L . n ,E . p) ;connect (E. n , n) ;connect (n , gnd . p) ;connect (E. f l ange , Reductor . f l a n g e a ) ;connect ( Reductor . f l ange b , J . f l a n g e a ) ;connect ( J . f l ange b , f l a n g e b ) ;
end MotorDC ; Figura 2.21: Comandos para la implementacion de la clase “motor”.
30

File 2.2: rueda.mo p a r t i a l model TwoPortR2T
Modelica . S I u n i t s . Force f ;Modelica . S I u n i t s . Torque tau ;Modelica . S I u n i t s . Distance s ;Modelica . S I u n i t s . Angle phi ;Modelica . Mechanics . Rotat iona l . I n t e r f a c e s . Flange a f lange aR ;Modelica . Mechanics . Rotat iona l . I n t e r f a c e s . Flange b f lange bR ;Modelica . Mechanics . T r a n s l a t i o n a l . I n t e r f a c e s . Flange a f lange aT ;Modelica . Mechanics . T r a n s l a t i o n a l . I n t e r f a c e s . Flange b f lange bT ;
equat ionf = f lange aT . f − f lange bT . f ;tau = f lange aR . tau−f lange bR . tau ;0 = f lange aR . phi + f lange bR . phi ;0 = f lange aT . s + f lange bT . s ;phi = f lange aR . phi ;s = f lange aT . s ;
end TwoPortR2T ;
model R2Textends TwoPortR2T ;parameter Real rad iu s ;
equat iontau = f ∗ rad iu s ;s = −phi ∗ rad iu s ;
end R2T;
model Wheelparametros par ;Modelica . E l e c t r i c a l . Analog . Sources . S igna lVo l tage S ;MotorDC motor ;Modelica . Mechanics . Rotat iona l . Components . I n e r t i a Jc J=par . WheelJ ) ;Modelica . Mechanics . Rotat iona l . Components . Damper D(d=par . WheelD) ;R2T r2t ( rad iu s=par . WheelRadio ) ;Modelica . Mechanics . T r a n s l a t i o n a l . Components . Mass M(m=par . WheelM) ;Modelica . Mechanics . T r a n s l a t i o n a l . I n t e r f a c e s . Flange b f lange bT ;Modelica . Mechanics . Rotat iona l . Sources . Torque f r i c c i o n ( tau=−par .
WheelFricc ion ∗( par . ChassisM + par . ChassisMCarga ) /2) ;equat ion
connect (S . p , motor . p ) ;connect (S . n , motor . n ) ;connect ( motor . f l ange b , Jc . f l a n g e a ) ;connect ( Jc . f l ange b ,D. f l a n g e a ) ;connect (D. f l ange b , f r i c c i o n . f l a n g e ) ;connect ( motor . f l ange b , r2 t . f l ange aR ) ;connect ( r2 t . f lange bT ,M. f l a n g e a ) ;connect (M. f l ange b , f lange bT ) ;
end Wheel ; Figura 2.22: Comandos para la implementacion de la clase “rueda”.
31

File 2.3: chasis.mo p a r t i a l model Chass i s
parametros par ;Wheel LW,RW;Modelica . Mechanics . T r a n s l a t i o n a l . Components . Mass MC(m=par . ChassisM +
par . ChassisMCarga ) ;Modelica . Mechanics . T r a n s l a t i o n a l . Components . Spr ing LRes ( c=par .
ChassisKResorte ) ;Modelica . Mechanics . T r a n s l a t i o n a l . Components . Spr ing RRes( c=par .
ChassisKResorte ) ;parameter Real a x i s=par . Chass isSemiEje ;Real Ltau , Rtau , tau ;Modelica . Mechanics . Rotat iona l . Sources . Torque T;Modelica . Mechanics . Rotat iona l . Components . I n e r t i a JC( J=par . Chass i sJ +
par . ChassisMCarga∗par . ChassisBrazoCarga∗par . ChassisBrazoCarga ) ;Real s , v , a , phi ( s t a r t =0) ,w, a l f a , x ( s t a r t =0) , y ( s t a r t =0) , vx , vy ;
equat ionconnect (LW. f lange bT , LRes . f l a n g e a ) ;connect ( LRes . f l ange b ,MC. f l a n g e a ) ;connect (RW. f lange bT , RRes . f l a n g e a ) ;connect (RRes . f l ange b ,MC. f l a n g e a ) ;Ltau=LW. f lange bT . f ∗ a x i s /2 ;Rtau=RW. f lange bT . f ∗ a x i s /2 ;tau=Rtau−Ltau ;connect (T. f l ange , JC . f l a n g e a ) ;T. tau=−tau ;s=MC. s ;phi=JC . phi ;v=der ( s ) ;a=der ( v ) ;w=der ( phi ) ;a l f a=der (w) ;vx=v∗ cos ( phi ) ;vy=v∗ s i n ( phi ) ;vx=der ( x ) ;vy=der ( y ) ;
end Chass i s ; Figura 2.23: Comandos para la implementacion de la clase “chasis”.
32

File 2.4: directchasis.mo model D i r e c tChas s i s
extends Chass i s ;parameter Real Per=4;parameter Real p i =3.1416;
equat ionLW. S . v=10+2∗cos (2∗ pi ∗ time /Per ) ;RW. S . v=10−2∗cos (2∗ pi ∗ time /Per ) ;
end Di r e c tChas s i s ; Figura 2.24: Comandos para la implementacion de la clase “directchasis”.
relacionadas con la respuesta del sistema, tales como velocidades, posicion, corrientes,torques etc.
2.5 Envıo y Recepcion de datos a partir de Vision
por Computador
La experimentacion sobre el AGV requiere de la implementacion de un sistema deadquisicion de datos que permita al usuario sintetizar senales para excitar el sistemay ademas observar su respuesta. En esta seccion se presenta el desarrollo de un pro-grama que utiliza una tarjeta de National Instruments para entregarle las senales alvehıculo, suponiendo que este es manejado por medio de senales PWM y detecta sucomportamiento por medio de una camara ubicada en el techo para obtener referenciasabsolutas de posicion y orientacion.
Envıo de datos
En esta parte de la experimentacion se entrega a cada uno de los motores una senal devoltaje por medio de una tarjeta de adquisicion de datos de National Instruments. Eldesarrollo que se presenta en esta seccion utiliza senales elegidas con fines de identifi-cacion del modelo, aunque haciendo pequenas modificaciones pueden ser aplicadas lassenales requeridas por el usuario.
Las senales de entradas en experimentos destinados a la identificacion de sistemasdeben tener persistencia de excitacion, es decir las entradas deben contener un numerosuficiente de armonicas, de manera que se logre la excitacion del sistema en todos losmodos dinamicos en que se requiere ser identificado. Entre las senales de entrada mascomunes que presentan esta caracterıstica estan las Senales Pseudo Aleatorias Binarias(PRBS por sus siglas en ingles) y las senales Chirp o Swept (barrido de senal senoidal).
Una senal binaria pseudo-aleatoria es una secuencia en tiempo discreto que exhibeuna ley de amplitud binaria (en general normalizada a ceros y unos), de forma que
33

(a) Senal PRBS (b) Senal Chirp
Figura 2.25: Senales de entrada sintetizadas para enviar al vehıculo
esta se aproxime a un ruido blanco con un contenido rico de frecuencias. Se presentaun ejemplo de este tipo de senales en la figura 2.25(a).
Una senal Chirp es una sinusoide con una frecuencia que cambia en forma continuaen una cierta banda de frecuencias ω1 ≤ ω2 en un intervalo de tiempo 0 ≤ t ≤ T . [62]Una senal de este tipo exhibe un incremento de la frecuencia que es lineal en el tiempocomo el que se muestra en la figura 2.25(b).
Para el envıo de los datos se realizaron dos programas en Labview que permiten alusuario sintetizar senales Chirp y PRBS respectivamente.
Por su parte, los motores del vehıculo estaban alimentados por baterıas y circuitosde modulados por ancho de pulso (PWM) que permiten el ajuste de la tension prome-dio. La senal triangular que generaba el PWM que estaba implementada en el vehıculotenıa un perıodo de 100 ms y permitıa un funcionamiento apropiado, razon por la quela senal a sintetizar se ajusta para tener frecuencias menores a 10 Hz.
Las senales generadas con estos programas fueron probadas en el laboratorio pormedio de un osciloscopio digital y en algunos casos diferıan de lo esperado dando erro-res en tiempo de hasta 5 ms. Ya que se busca entregar senales que cubran un espectrode frecuencia de hasta 10 Hz, este tipo de errores es perfectamente permisible.
El usuario tiene acceso en pantalla al numero de muestras que desea enviar y ala ruta en la cual se estan guardando los archivos que se crean en el momento de laejecucion y que guardan la informacion de envıo. Se dispuso de un boton que cambia arojo cuando se inicia la secuencia de envıo y que permite la sincronizacion de los datosde entrada y salida (ver figura 2.26).
Estos programas tienen basicamente una estructura de secuencia con cuatro eta-pas. A continuacion se muestra en detalle el desarrollo llevado a cabo para sintetizarlas senales PRBS.
En la primera etapa mostrada en la figura 2.27 se crean las senales PRBS, seabre el archivo en el cual se guardaran los datos y se inicializan los valores que se
34

Figura 2.26: Modulacion por Ancho de Pulso
Figura 2.27: Secuencias para envıo de senales - Primer frame
enviaran a las entradas digitales del puente H del vehıculo. Los datos que entrega lafuncion de PRBS son 0 o 1, lo que va a representar el ancho de pulso del PWM entredos valores representativos. Ya que seleccionar los valores extremos que permiten lasbaterıas supone cambios instantaneos de 12 V en las senales de entrada de los motoresque, a su vez, producen picos de corrientes grandes que pueden danar los dispositivoselectronicos, se decidio que los valores 0 y 1 de la senal PRBS correspondan a losporcentajes 20 % y 80 % del ancho de pulso de las senales de entrada.
35

Figura 2.28: Secuencias para envıo de senales - Segundo frame
En la segunda etapa (figura 2.28) se genera una senal de arranque que correspondea una senal rampa desde 0 % hasta 50 % que dura un segundo y busca orientar lasruedas para que presenten mejor traccion y adicionalmente arrancar de manera suavelos motores para no tener problemas por picos de corriente que pueden danar las tarjetaselectronicas.
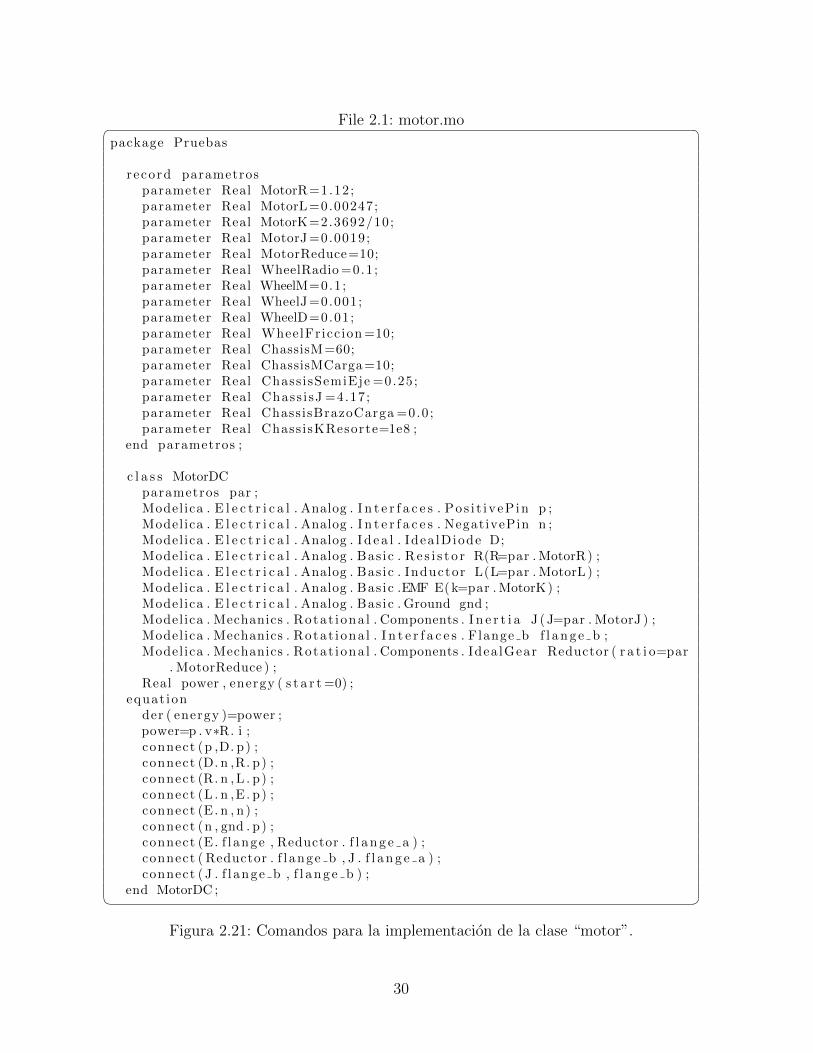
La senal PRBS se sintetiza y envıa en la tercera etapa, estructura de secuenciaque se presenta en la figura 2.29. En la estructura de repeticiones externa se prendeel boton de sincronismo y se entregan las senales generadas en la primera etapa a lasvariables duty1 y duty2.
La ultima etapa, el ultimo recuadro de la estructura de secuencia, mostrado enla figura 2.30, permite la entrega a los motores de una senal de voltaje tipo rampadescendiente para permitirles un frenado rapido pero suave.
Para llevar a cabo repeticiones de las pruebas se hizo una variacion del programaque permitiera dar acceso a archivos con las senales generadas previamente. Como seobserva en la figura 2.31 en este caso no se utiliza una funcion de escritura ya que nose va a generar una senal sino a leerla y es el resultado de esa lectura lo que se va aentregar en el frame tres para enviar las senales a los motores.
36
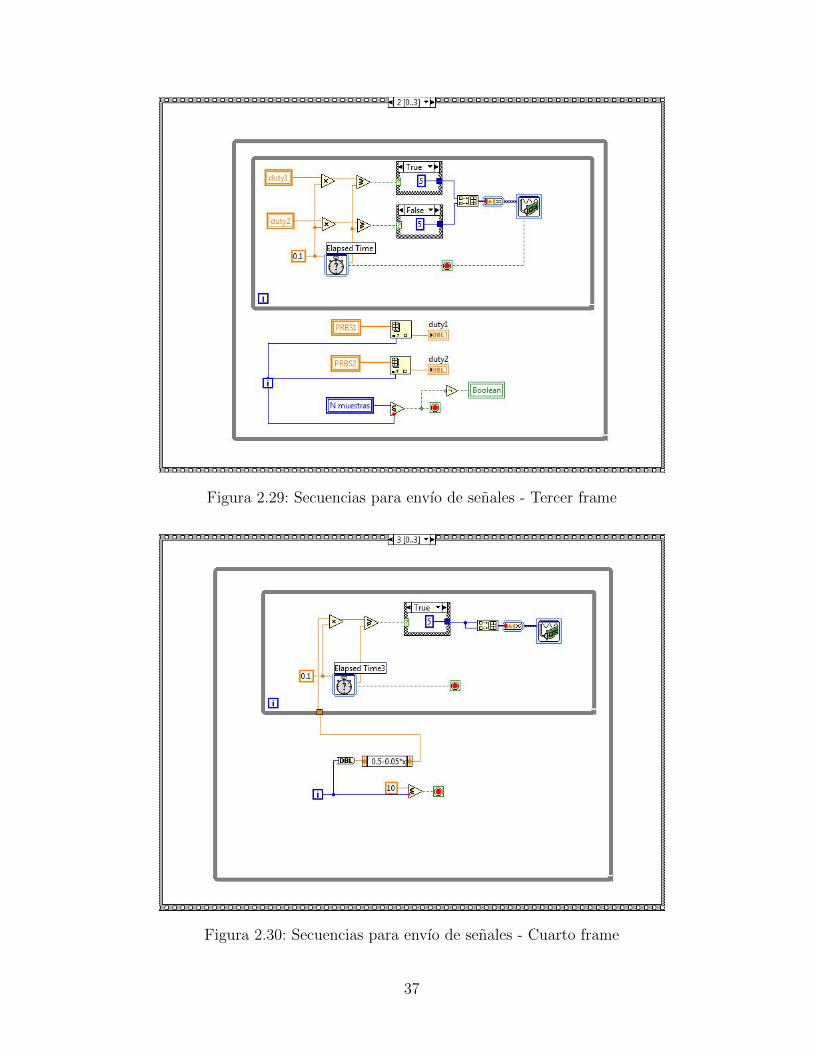
Figura 2.29: Secuencias para envıo de senales - Tercer frame
Figura 2.30: Secuencias para envıo de senales - Cuarto frame
37
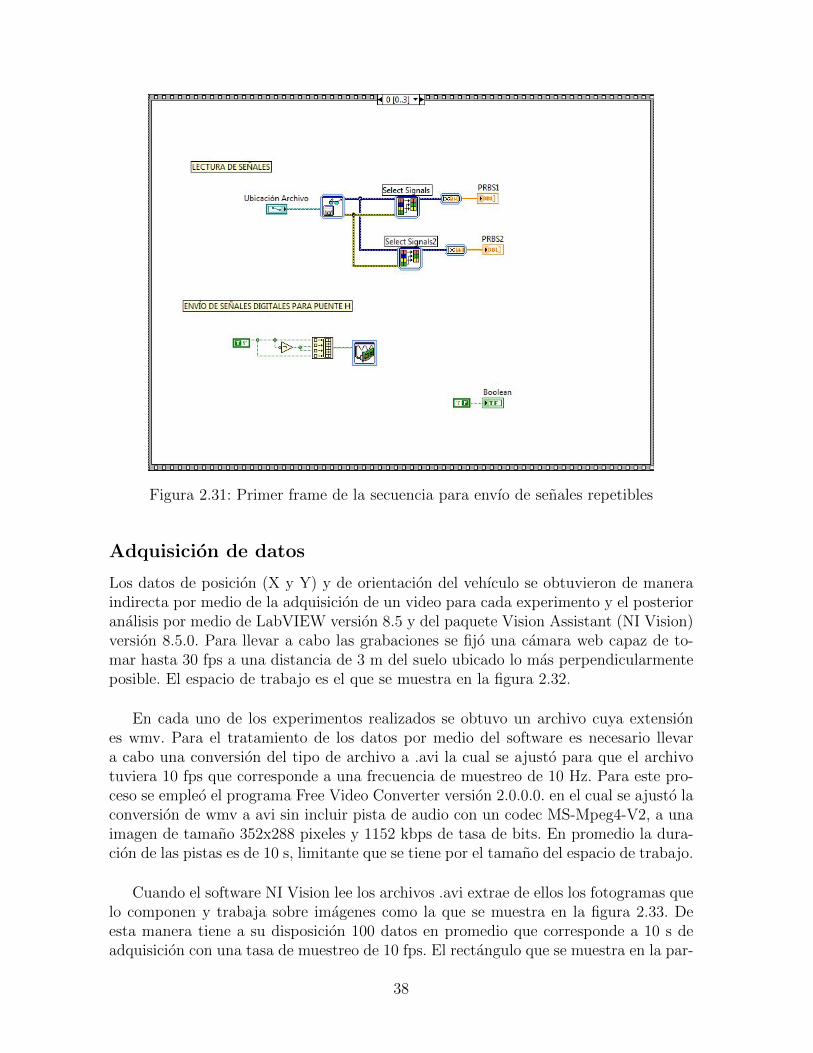
Figura 2.31: Primer frame de la secuencia para envıo de senales repetibles
Adquisicion de datos
Los datos de posicion (X y Y) y de orientacion del vehıculo se obtuvieron de maneraindirecta por medio de la adquisicion de un video para cada experimento y el posterioranalisis por medio de LabVIEW version 8.5 y del paquete Vision Assistant (NI Vision)version 8.5.0. Para llevar a cabo las grabaciones se fijo una camara web capaz de to-mar hasta 30 fps a una distancia de 3 m del suelo ubicado lo mas perpendicularmenteposible. El espacio de trabajo es el que se muestra en la figura 2.32.
En cada uno de los experimentos realizados se obtuvo un archivo cuya extensiones wmv. Para el tratamiento de los datos por medio del software es necesario llevara cabo una conversion del tipo de archivo a .avi la cual se ajusto para que el archivotuviera 10 fps que corresponde a una frecuencia de muestreo de 10 Hz. Para este pro-ceso se empleo el programa Free Video Converter version 2.0.0.0. en el cual se ajusto laconversion de wmv a avi sin incluir pista de audio con un codec MS-Mpeg4-V2, a unaimagen de tamano 352x288 pixeles y 1152 kbps de tasa de bits. En promedio la dura-cion de las pistas es de 10 s, limitante que se tiene por el tamano del espacio de trabajo.
Cuando el software NI Vision lee los archivos .avi extrae de ellos los fotogramas quelo componen y trabaja sobre imagenes como la que se muestra en la figura 2.33. Deesta manera tiene a su disposicion 100 datos en promedio que corresponde a 10 s deadquisicion con una tasa de muestreo de 10 fps. El rectangulo que se muestra en la par-
38
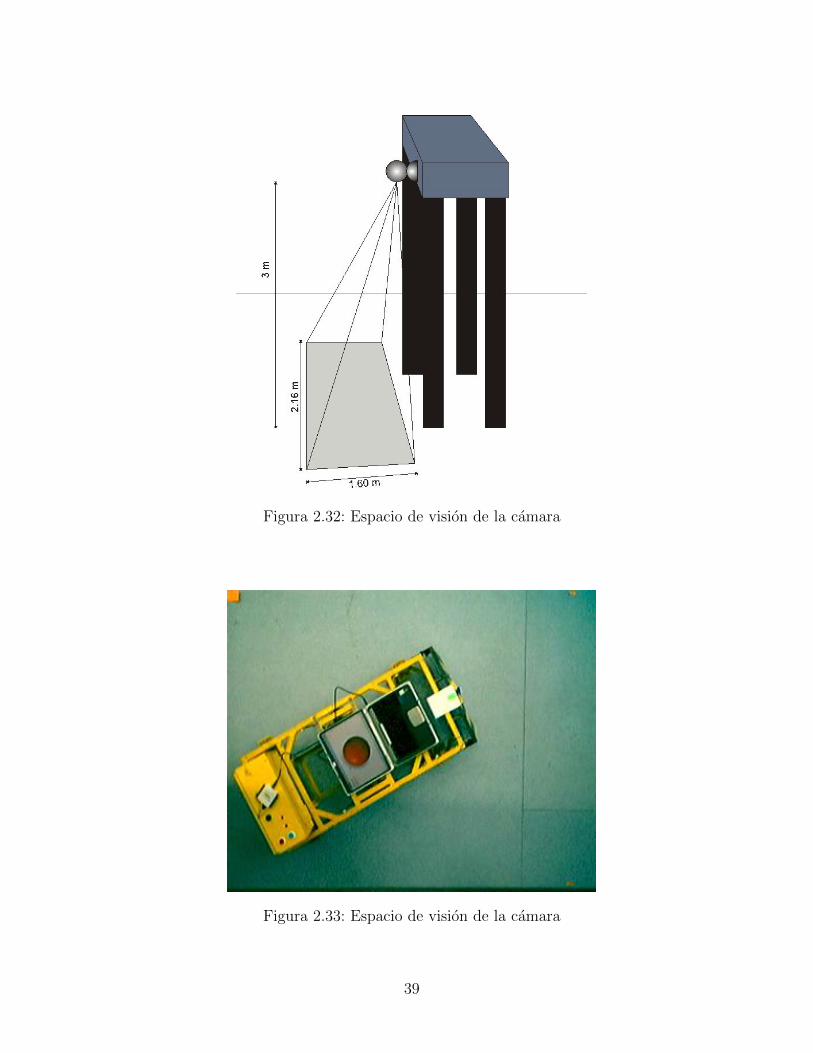
Figura 2.32: Espacio de vision de la camara
Figura 2.33: Espacio de vision de la camara
39
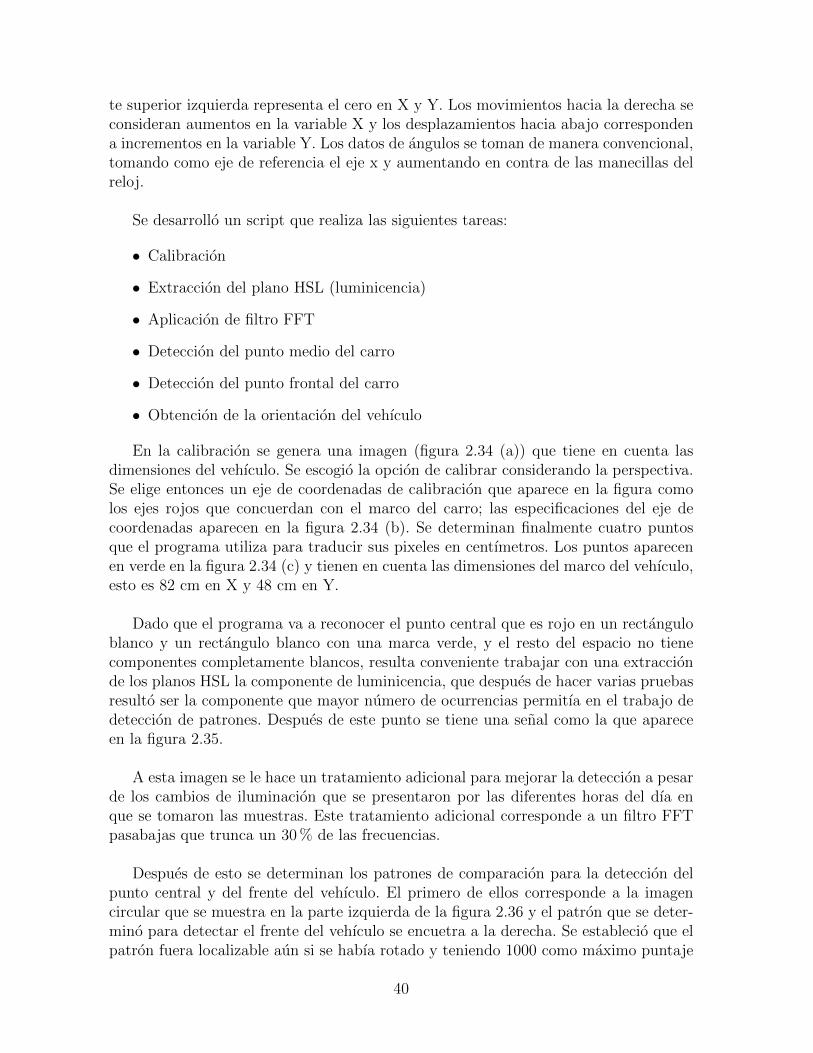
te superior izquierda representa el cero en X y Y. Los movimientos hacia la derecha seconsideran aumentos en la variable X y los desplazamientos hacia abajo correspondena incrementos en la variable Y. Los datos de angulos se toman de manera convencional,tomando como eje de referencia el eje x y aumentando en contra de las manecillas delreloj.
Se desarrollo un script que realiza las siguientes tareas:
• Calibracion
• Extraccion del plano HSL (luminicencia)
• Aplicacion de filtro FFT
• Deteccion del punto medio del carro
• Deteccion del punto frontal del carro
• Obtencion de la orientacion del vehıculo
En la calibracion se genera una imagen (figura 2.34 (a)) que tiene en cuenta lasdimensiones del vehıculo. Se escogio la opcion de calibrar considerando la perspectiva.Se elige entonces un eje de coordenadas de calibracion que aparece en la figura comolos ejes rojos que concuerdan con el marco del carro; las especificaciones del eje decoordenadas aparecen en la figura 2.34 (b). Se determinan finalmente cuatro puntosque el programa utiliza para traducir sus pixeles en centımetros. Los puntos aparecenen verde en la figura 2.34 (c) y tienen en cuenta las dimensiones del marco del vehıculo,esto es 82 cm en X y 48 cm en Y.
Dado que el programa va a reconocer el punto central que es rojo en un rectanguloblanco y un rectangulo blanco con una marca verde, y el resto del espacio no tienecomponentes completamente blancos, resulta conveniente trabajar con una extraccionde los planos HSL la componente de luminicencia, que despues de hacer varias pruebasresulto ser la componente que mayor numero de ocurrencias permitıa en el trabajo dedeteccion de patrones. Despues de este punto se tiene una senal como la que apareceen la figura 2.35.
A esta imagen se le hace un tratamiento adicional para mejorar la deteccion a pesarde los cambios de iluminacion que se presentaron por las diferentes horas del dıa enque se tomaron las muestras. Este tratamiento adicional corresponde a un filtro FFTpasabajas que trunca un 30 % de las frecuencias.
Despues de esto se determinan los patrones de comparacion para la deteccion delpunto central y del frente del vehıculo. El primero de ellos corresponde a la imagencircular que se muestra en la parte izquierda de la figura 2.36 y el patron que se deter-mino para detectar el frente del vehıculo se encuetra a la derecha. Se establecio que elpatron fuera localizable aun si se habıa rotado y teniendo 1000 como maximo puntaje
40

Figura 2.34: Imagen generada para realizar la calibracion. (a) Datos de la calibraciona partir del eje de coordenadas y los puntos de calibracion (b y c)
de deteccion, se le permite al programa suponer que se ha detectado el objeto con unpuntaje mınimo de 500. La ubicacion del vehıculo se extrae de la posicion del puntocentral.
Finalmente para determinar la orientacion se utiliza la funcion caliper para deter-minar el angulo que se forma entre la componente horizontal y la recta formada entreel patron central y el patron frontal, lo cual se puede observar en la figura 2.37.
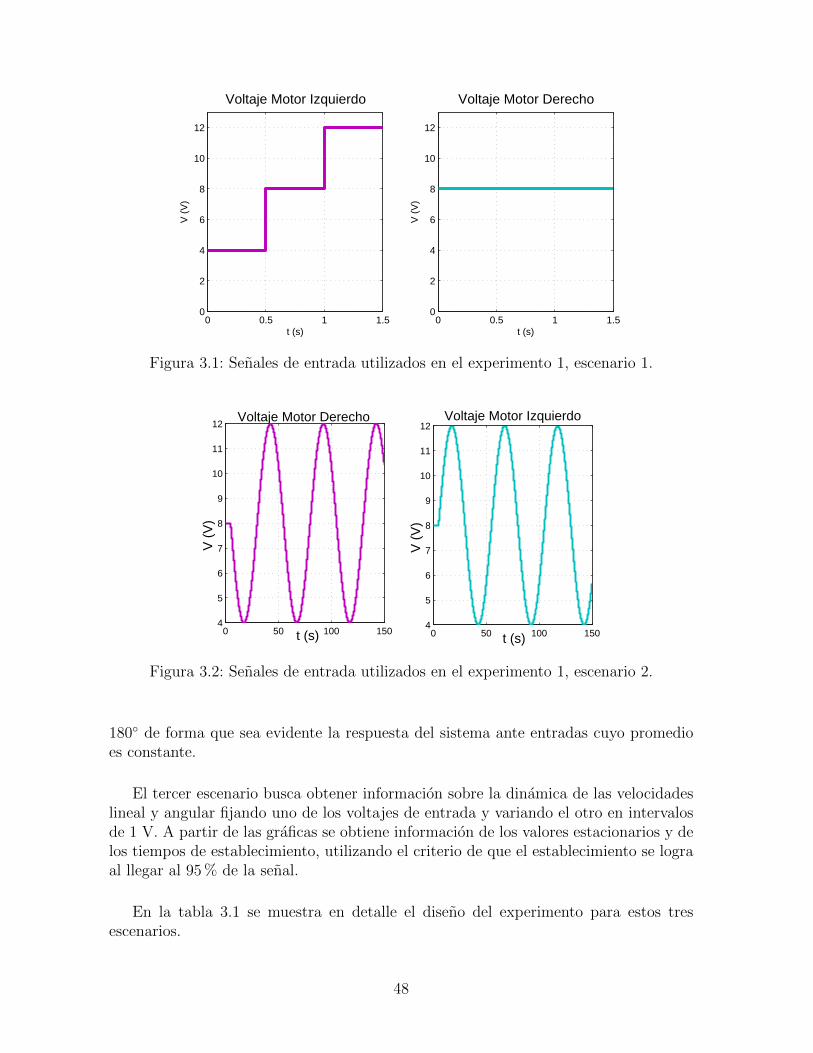
Esto, sin embargo, permite el trabajo sobre una sola grafica a la vez, lo que equivalea tener que hacer esta prueba 100 veces por cada archivo de video. Se hace entoncesnecesario exportar este script a LabVIEW y modificarlo para generar un programa quecree un archivo con los datos de posicion y orientacion que sean de facil acceso. En lafigura 2.38 se presenta el resultado de este tratamiento.
El usuario puede observar en forma continua la lectura de las componentes de po-sicion x y y y la orientacion θ y simultaneamente ver como se esta moviendo el carro
41
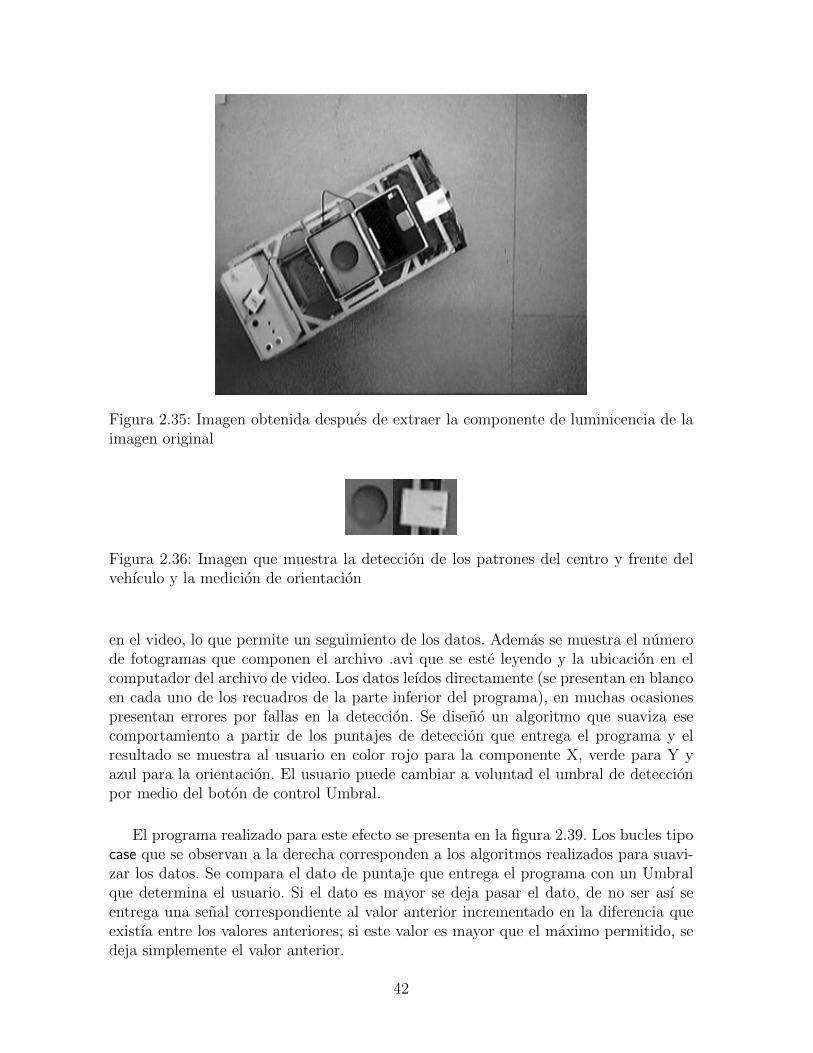
Figura 2.35: Imagen obtenida despues de extraer la componente de luminicencia de laimagen original
Figura 2.36: Imagen que muestra la deteccion de los patrones del centro y frente delvehıculo y la medicion de orientacion
en el video, lo que permite un seguimiento de los datos. Ademas se muestra el numerode fotogramas que componen el archivo .avi que se este leyendo y la ubicacion en elcomputador del archivo de video. Los datos leıdos directamente (se presentan en blancoen cada uno de los recuadros de la parte inferior del programa), en muchas ocasionespresentan errores por fallas en la deteccion. Se diseno un algoritmo que suaviza esecomportamiento a partir de los puntajes de deteccion que entrega el programa y elresultado se muestra al usuario en color rojo para la componente X, verde para Y yazul para la orientacion. El usuario puede cambiar a voluntad el umbral de deteccionpor medio del boton de control Umbral.
El programa realizado para este efecto se presenta en la figura 2.39. Los bucles tipocase que se observan a la derecha corresponden a los algoritmos realizados para suavi-zar los datos. Se compara el dato de puntaje que entrega el programa con un Umbralque determina el usuario. Si el dato es mayor se deja pasar el dato, de no ser ası seentrega una senal correspondiente al valor anterior incrementado en la diferencia queexistıa entre los valores anteriores; si este valor es mayor que el maximo permitido, sedeja simplemente el valor anterior.
42
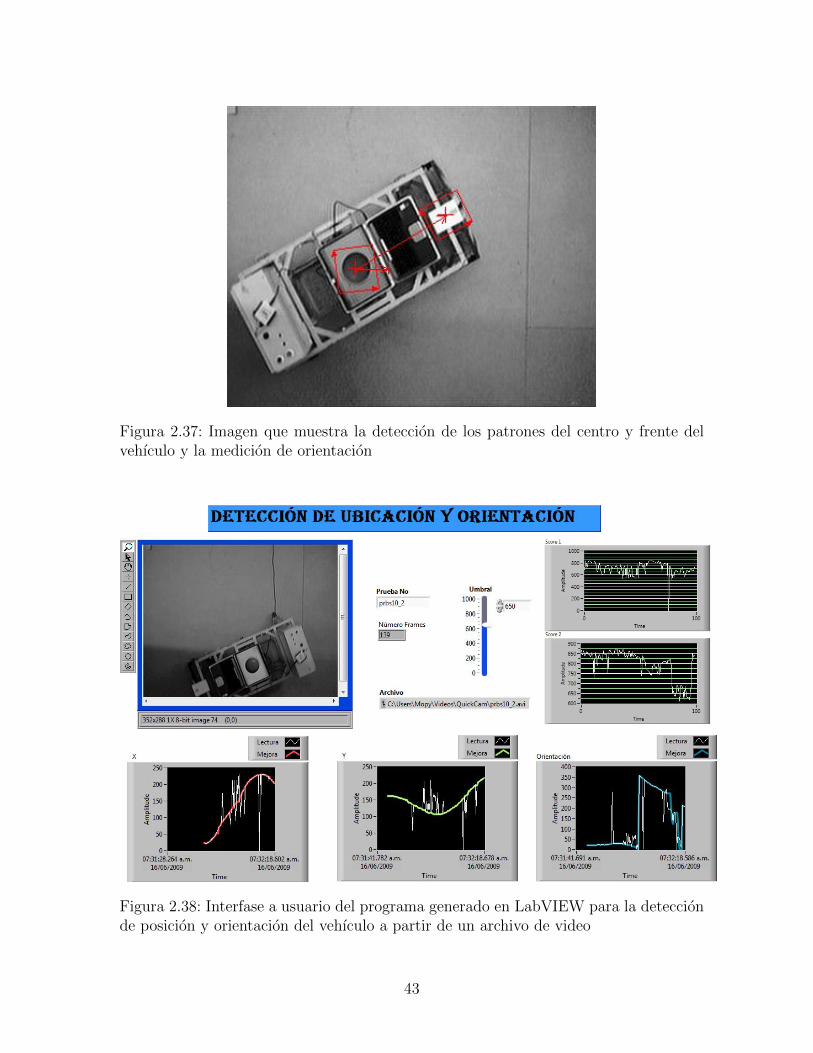
Figura 2.37: Imagen que muestra la deteccion de los patrones del centro y frente delvehıculo y la medicion de orientacion
Figura 2.38: Interfase a usuario del programa generado en LabVIEW para la deteccionde posicion y orientacion del vehıculo a partir de un archivo de video
43

Figura 2.39: Programa generado en LabVIEW para la deteccion de posicion y orienta-cion del vehıculo a partir de un archivo de video
En la parte inferior derecha de la figura se encuentra la funcion que permite guardarel archivo, que se decidio fuera de extension .txt para que sea de facil acceso tanto desdeLabVIEW como desde Matlab. El archivo que se obtiene tiene 3 columnas correspon-diente a los registros de X, Y y orientacion respectivamente y el tamano depende de laduracion del video.
La rutina for que encierra todo el programa se implementa para hacer el analisis detodos los fotogramas que presente el video. Los valores que se encuentran en amarillofuera del ciclo corresponden a valores iniciales de X, Y, orientacion que son utiles cuan-do en el primer momento no se presenta una deteccion adecuada. La determinacion deestos valores se debe hacer manualmente y ser cambiados para cada video.
Los bloques que hacen todo el trabajo son “Lee & Calibra” y “Match”. El progra-ma “Lee & Calibra” se muestra en la figura 2.40. Los controles que aparecen en verdecorresponden a las variables de entrada y los que aparecen en rojo a las salidas. Casitodo el programa fue extraido del script, sin embargo la entrada era una imagen porlo que se modifico la forma de lectura para que lea el frame que se pide del archivo.avi. En conclusion el programa toma un archivo .avi, extrae una imagen, la calibra deacuerdo a un archivo guardado en el disco, saca el plano de luminicencia y lo filtra.Para la siguiente etapa se tiene entonces un imagen lista para la deteccion.
44

Figura 2.40: Programa generado en LabVIEW para la lectura de video, extraccion deuna imagen y su calibracion y filtrado
Figura 2.41: Programa generado en LabVIEW para la lectura de video, extraccion deuna imagen y su calibracion y filtrado
En el VI “Match” que se presenta en la figura 2.41 se toma la senal que se hapreprocesado en el VI anterior y se hace la comparacion con cada uno de los patronesque son entradas del programa. Los resultados del programa son entonces la imagenprocesada, los datos de posicion y orientacion y los puntajes de las comparaciones delos patrones “centro” y “frente”.
Esta aplicacion fue empleada exlusivamente en este capıtulo y permitio conocermejor la planta. Despues de esto, infortunadamente el vehıculo fue desmantelado (seutilizaron algunas de sus partes en otros proyectos) y esto obligo a cambiar la metodo-logıa del trabajo a diseno y simulacion.
45


Capıtulo 3
Simulaciones de la Planta en LazoAbierto
Este capıtulo busca explorar las caracterısticas principales en lazo abierto del vehıculopara tener bases en el proceso de diseno del controlador. Se divide el proceso en dospartes: simulacion del comportamiento del vehıculo a partir de cambios en las entradas,con el fin de determinar sus caracterısticas dinamicas y, por otra parte, simulacion delefecto de colocar peso adicional, considerado como perturbacion externa, al vehıculo.Para cada parte se presenta la descripcion del experimento y su desarrollo.
3.1 Descripcion de Experimentos
Para observar el comportamiento del sistema en lazo abierto se presentan dos experi-mentos. El primero busca determinar la tendencia del comportamiento de las variablesde estado mediante la excitacion del sistema con entradas tanto constantes como va-riables. En el segundo experimento se aplican diferentes cargas (masa adicional) paraverificar su efecto en las respuestas del sistema ante entradas predefinidas.
Experimento 1. Comportamiento del Vehıculo ante DiferentesSenales de Entrada
Por medio de tres escenarios de entrada diferentes se busca establecer caracterısticasdel vehıculo trabajando sobre la implementacion en Matlab presentada en la seccion 2.3.
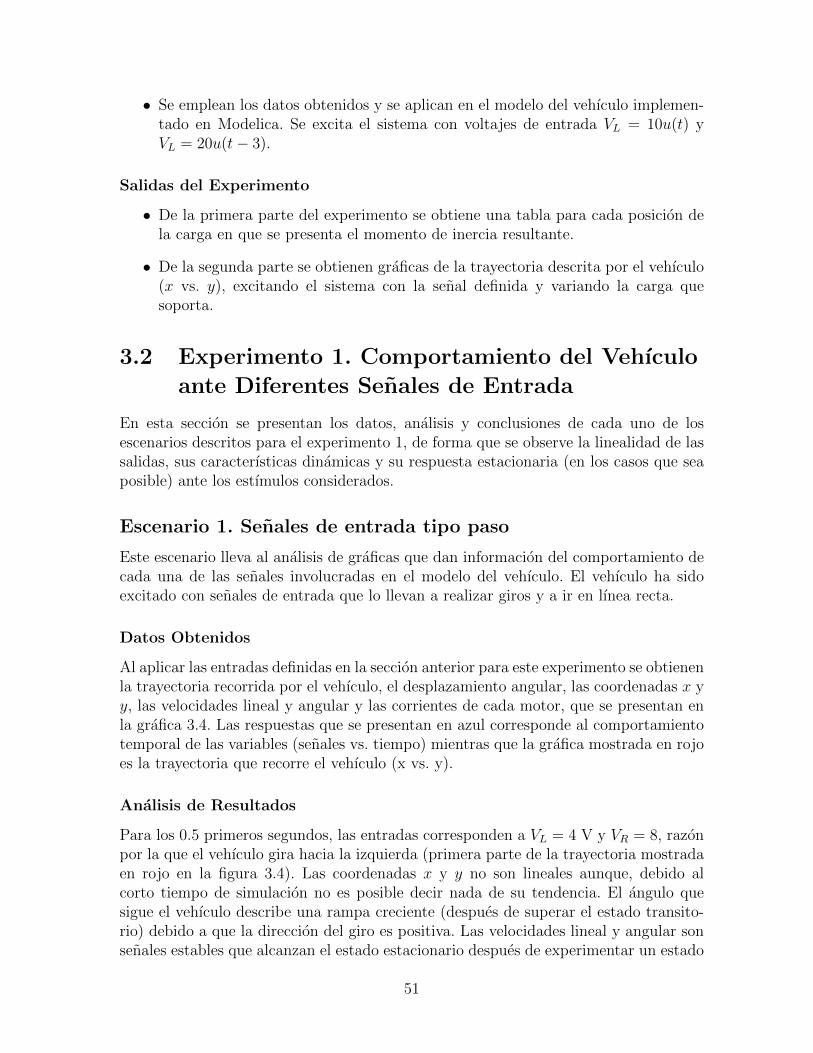
En el primer escenario se sintetizan dos senales tipo paso con las cuales es posi-ble explorar el comportamiento de las variables de estado aplicando las tres posiblescombinaciones de entrada (voltaje del motor izquierdo menor que el derecho, voltajesiguales y voltaje del motor izquierdo mayor que el derecho). Los tiempos de activacionseleccionados permiten visualizar la dinamica de las senales.
En el segundo escenario se observa el comportamiento de las variables de estadoante la aplicacion de senales de entrada tipo sinusoidal con igual nivel DC y desfase de
47
0 0.5 1 1.50
2
4
6
8
10
12
t (s)
V (
V)
Voltaje Motor Izquierdo
0 0.5 1 1.50
2
4
6
8
10
12
Voltaje Motor Derecho
t (s)
V (
V)
Figura 3.1: Senales de entrada utilizados en el experimento 1, escenario 1.
0 50 100 1504
5
6
7
8
9
10
11
12Voltaje Motor Derecho
t (s)
V (
V)
0 50 100 1504
5
6
7
8
9
10
11
12Voltaje Motor Izquierdo
t (s)
V (
V)
Figura 3.2: Senales de entrada utilizados en el experimento 1, escenario 2.
180 de forma que sea evidente la respuesta del sistema ante entradas cuyo promedioes constante.
El tercer escenario busca obtener informacion sobre la dinamica de las velocidadeslineal y angular fijando uno de los voltajes de entrada y variando el otro en intervalosde 1 V. A partir de las graficas se obtiene informacion de los valores estacionarios y delos tiempos de establecimiento, utilizando el criterio de que el establecimiento se lograal llegar al 95 % de la senal.
En la tabla 3.1 se muestra en detalle el diseno del experimento para estos tresescenarios.
48

Experimento 1. Comportamiento del Vehıculo
Escenario 1. Senales de entrada tipo pasoObjetivo Observar el comportamiento de las variables de estado del sistema ante
senales de entrada tipo paso que lleven al vehıculo a ejecutar giros en losdos sentidos e ir en lınea recta.
Diseno El sistema se excita con las senales VL y VR durante 1.5 s (las senales semuestran en la figura 3.1).
VR = 8 u(t), VL =
4 V 0 ≤ x < 0,5 s
8 V 0,5 ≤ x < 1 s
12 V 1 ≤ x ≤ 1,5 s
Salidas Se grafica cada una de las variables de estado: la trayectoria recorridapor el vehıculo (x vs. y), el desplazamiento angular, las velocidades linealy angular y las corrientes de cada uno de los motores.
Escenario 2. Senales de entrada tipo sinusoidalObjetivo Observar el comportamiento del vehıculo ante la aplicacion de senales de
entrada periodicas que sean antisimetricas con respecto a un nivel DC,de tal forma que el promedio entre ellas se conserve.
Diseno El sistema se excita con las senales VL y VR durante 150 s.
VL = 8 + 4 ∗ sin(0,04πt− π/5)u(t− 5)
VR = 8− 4 ∗ sin(0,04πt− π/5)u(t− 5)
Los voltajes aplicados para esta parte del experimento son senales sinu-soidales que empiezan despues de 5 segundos como se muestran en lafigura 3.2. Estas senales presentan igual amplitud, frecuencia y nivel DC,pero estan desfasadas en 180 grados.
Salidas Se obtienen las graficas de la trayectoria recorrida por el vehıculo (xvs. y), el desplazamiento angular, las velocidades lineal y angular y lascorrientes de cada uno de los motores.
Escenario 3. Senales de entrada constantesObjetivo Analizar la dinamica de las senales de velocidad lineal y angular a partir
de un barrido de los valores de entrada.Diseno El voltaje izquierdo se fija en Vizq = 0 V mientras el derecho se varıa de
1 V a 12 V en intervalos de 1 V. Se repite el mismo barrido fijando ahorael voltaje izquierdo en Vizq = 12 V.
Salidas Se obtienen graficamente las velocidades lineal y angular y a partir deellas se realizan graficas de valores estacionarios y tiempos de respuesta.
Tabla 3.1: Experimento No.1
49
Experimento 2. Efecto de carga
Un AGV esta disenado para llevar una carga de un punto a otro. Esta carga, ası comola posicion en que se encuentre, puede tener efectos sobre el comportamiento del des-plazamiento del vehıculo. Se establecieron cuatro escenarios (correspondientes a cuatrodiferentes ubicaciones de la carga sobre el vehıculo) para determinar la variacion de latrayectoria que describe el vehıculo ante la aplicacion de diferentes carga.
Objetivo del Experimento
Observar el efecto de la aplicacion de diferentes cargas y de su ubicacion sobre eldesplazamiento del vehıculo.
Diseno del experimento
Este experimento se lleva a cabo en dos partes:
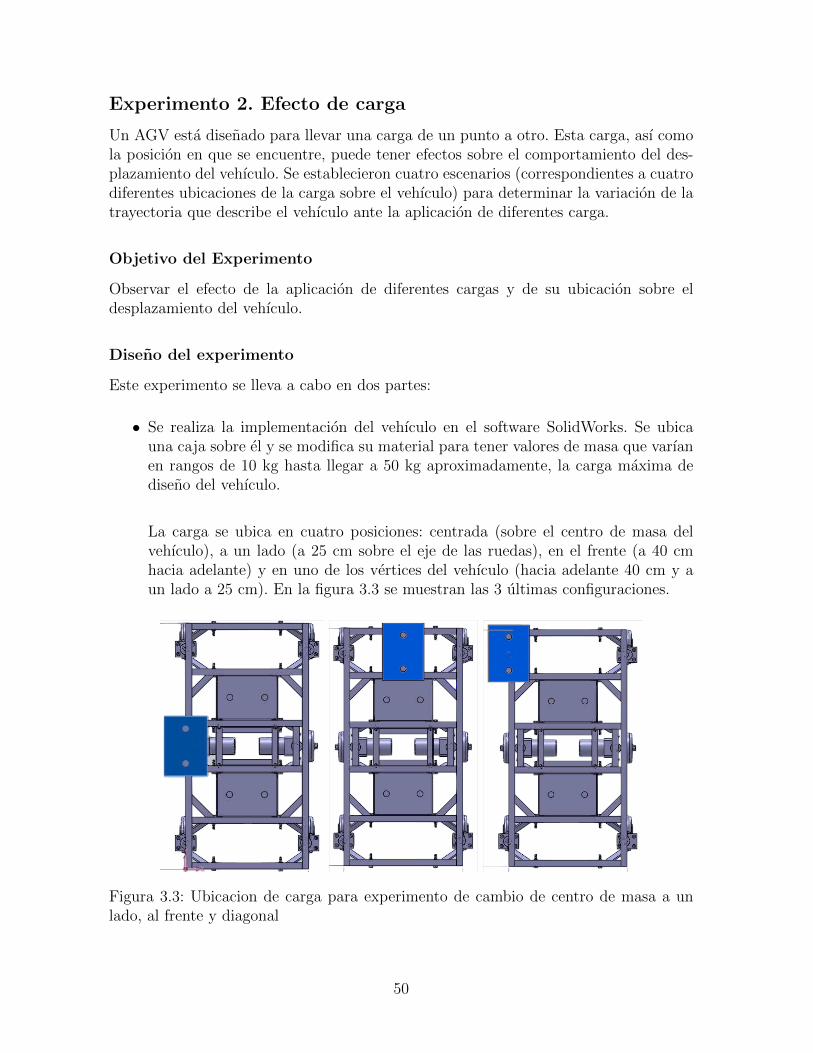
• Se realiza la implementacion del vehıculo en el software SolidWorks. Se ubicauna caja sobre el y se modifica su material para tener valores de masa que varıanen rangos de 10 kg hasta llegar a 50 kg aproximadamente, la carga maxima dediseno del vehıculo.
La carga se ubica en cuatro posiciones: centrada (sobre el centro de masa delvehıculo), a un lado (a 25 cm sobre el eje de las ruedas), en el frente (a 40 cmhacia adelante) y en uno de los vertices del vehıculo (hacia adelante 40 cm y aun lado a 25 cm). En la figura 3.3 se muestran las 3 ultimas configuraciones.
Figura 3.3: Ubicacion de carga para experimento de cambio de centro de masa a unlado, al frente y diagonal
50
• Se emplean los datos obtenidos y se aplican en el modelo del vehıculo implemen-tado en Modelica. Se excita el sistema con voltajes de entrada VL = 10u(t) yVL = 20u(t− 3).
Salidas del Experimento
• De la primera parte del experimento se obtiene una tabla para cada posicion dela carga en que se presenta el momento de inercia resultante.
• De la segunda parte se obtienen graficas de la trayectoria descrita por el vehıculo(x vs. y), excitando el sistema con la senal definida y variando la carga quesoporta.
3.2 Experimento 1. Comportamiento del Vehıculo
ante Diferentes Senales de Entrada
En esta seccion se presentan los datos, analisis y conclusiones de cada uno de losescenarios descritos para el experimento 1, de forma que se observe la linealidad de lassalidas, sus caracterısticas dinamicas y su respuesta estacionaria (en los casos que seaposible) ante los estımulos considerados.
Escenario 1. Senales de entrada tipo paso
Este escenario lleva al analisis de graficas que dan informacion del comportamiento decada una de las senales involucradas en el modelo del vehıculo. El vehıculo ha sidoexcitado con senales de entrada que lo llevan a realizar giros y a ir en lınea recta.
Datos Obtenidos
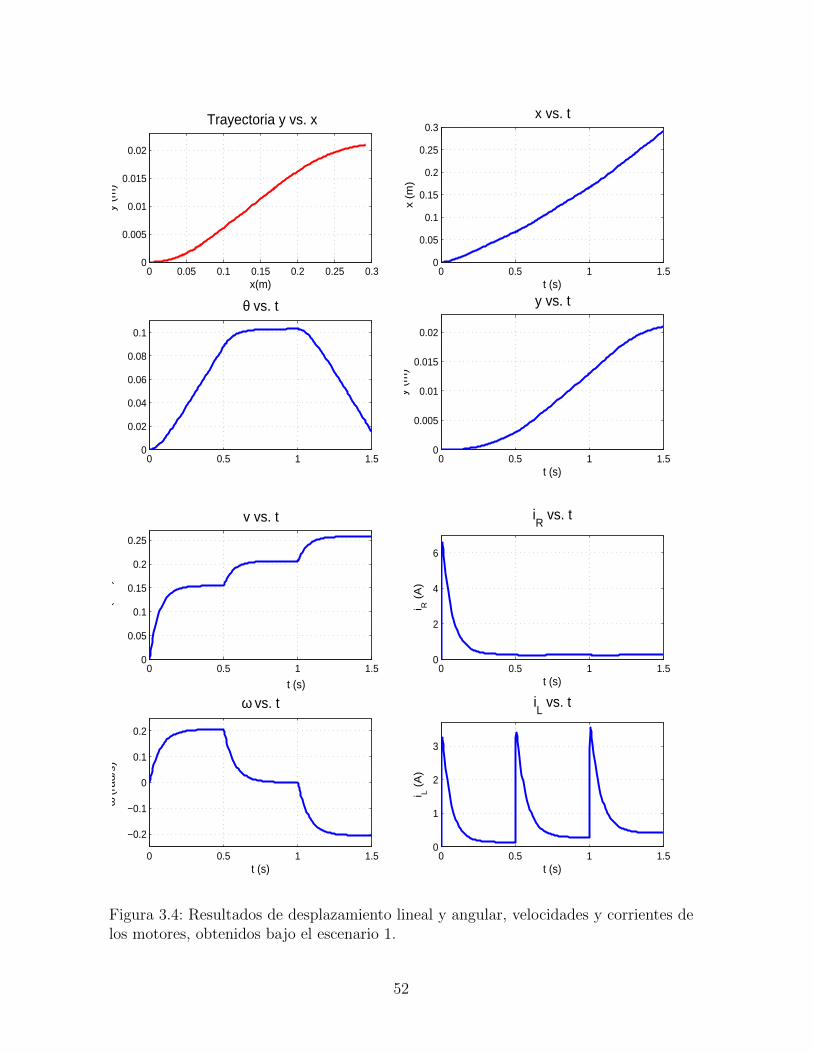
Al aplicar las entradas definidas en la seccion anterior para este experimento se obtienenla trayectoria recorrida por el vehıculo, el desplazamiento angular, las coordenadas x yy, las velocidades lineal y angular y las corrientes de cada motor, que se presentan enla grafica 3.4. Las respuestas que se presentan en azul corresponde al comportamientotemporal de las variables (senales vs. tiempo) mientras que la grafica mostrada en rojoes la trayectoria que recorre el vehıculo (x vs. y).
Analisis de Resultados
Para los 0.5 primeros segundos, las entradas corresponden a VL = 4 V y VR = 8, razonpor la que el vehıculo gira hacia la izquierda (primera parte de la trayectoria mostradaen rojo en la figura 3.4). Las coordenadas x y y no son lineales aunque, debido alcorto tiempo de simulacion no es posible decir nada de su tendencia. El angulo quesigue el vehıculo describe una rampa creciente (despues de superar el estado transito-rio) debido a que la direccion del giro es positiva. Las velocidades lineal y angular sonsenales estables que alcanzan el estado estacionario despues de experimentar un estado
51
0 0.05 0.1 0.15 0.2 0.25 0.30
0.005
0.01
0.015
0.02
Trayectoria y vs. x
x(m)
y (m
)
0 0.5 1 1.50
0.02
0.04
0.06
0.08
0.1
θ vs. t
0 0.5 1 1.50
0.05
0.1
0.15
0.2
0.25
0.3x vs. t
t (s)
x (m
)
0 0.5 1 1.50
0.005
0.01
0.015
0.02
y vs. t
t (s)
y (m
)
0 0.5 1 1.50
0.05
0.1
0.15
0.2
0.25
v vs. t
t (s)
v (m
/s)
0 0.5 1 1.5
−0.2
−0.1
0
0.1
0.2
ω vs. t
t (s)
ω (
rad
/s)
0 0.5 1 1.50
2
4
6
iR
vs. t
t (s)
i R (
A)
0 0.5 1 1.50
1
2
3
iL vs. t
t (s)
i L (
A)
Figura 3.4: Resultados de desplazamiento lineal y angular, velocidades y corrientes delos motores, obtenidos bajo el escenario 1.
52
estacionario que no presenta sobrepicos ni comportamientos no minifase. En los dosmotores se aplican cambios bruscos de voltaje que se traducen en picos de corriente,observandose que en el motor derecho este pico de corriente es del doble de valor queen el izquierdo, razon que es la misma que los cambios de los voltajes de entrada.
Para 0,5 ≤ t < 1 s, la referencia de voltaje del motor izquierdo pasa a ser VL = 8V, con lo que los dos motores adquieren el mismo voltaje. A partir de ese instante elvehıculo se desplaza describiendo una lınea recta, por lo que la grafica de desplaza-miento angular tiende a ser constante y, por ende, la velocidad angular se estabilizaen cero. Las coordenadas x y y adquieren un comportamiento lineal en este intervalomanteniendo el valor de la pendiente que se presenta en 0.5 s. La velocidad lineal llegaal estado estacionario con comportamiento de estado transitorio como el presentado enel primer intervalo. El motor izquierdo experimenta un pico de corriente similar al quese presenta en el primer intervalo aunque con un valor estacionario mayor e induce unpequeno pico de corriente de sentido contrario en el motor derecho alterando su valorde estado estacionario.
En el ultimo intervalo, 1 ≤ t < 1,5 s, las entradas son VL = 12 V y VR = 8, y elvehıculo gira ahora hacia la derecha, por lo que el angulo describe una rampa decre-ciente y la velocidad angular se hace negativa despues de superar un transitorio quedescribe el mismo comportamiento de los intervalos previos. El comportamiento de lascorrientes es similar al observado en el lapso anterior ya que el cambio de voltaje es elmismo. Igual que en lapso anterior, el nivel de estado estacionario de la corriente delmotor izquierdo aumenta ya que es excitado con mayor voltaje.
Se observa que las velocidades tienen un comportamiento estable, por lo que soncandidatos para ser variables de control. El angulo tiene un comportamiento lineal quepuede ser utilizado en el control empleando un esquema que involucre accion integral.
Conclusiones
Para senales de voltaje de entrada iguales aplicados en los motores, el vehıculo describetrayectorias rectas. Si son constantes diferentes el vehıculo realiza giros con velocidadeslineal y angular constantes.
El angulo que describe el vehıculo es lineal, y en caso de que las senales de entradasean iguales se vuelve constante.
La velocidad lineal y la velocidad angular son senales estables ante la aplicacion desenales de entrada constantes cuyo comportamiento en estado transitorio no cambiavisiblemente ante el cambio de las senales de entrada, esto es, conserva el mismo tiempode subida y no presenta sobrepicos.
Un cambio de voltaje aplicado en un motor genera un pico de corriente proporcional,y a su vez induce un pequeno pico de sentido contrario en el otro motor.
53
Escenario 2. Senales de entrada tipo sinusoidal
Las respuestas de las variables de estado del vehıculo ante las entradas sinusoidalesdescritas en la seccion anterior, ası como el analisis de los datos y las conclusiones quese obtienen de ellas se presentan a continuacion.
Datos Obtenidos
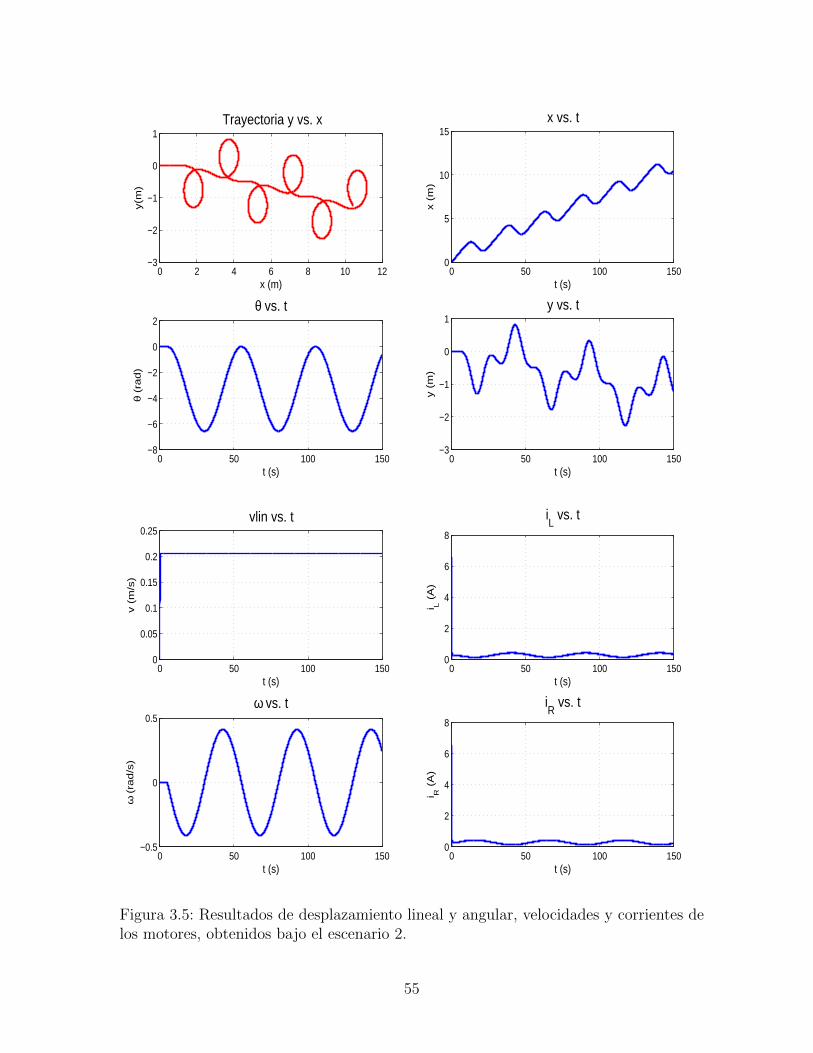
Los resultados de desplazamiento lineal y angular, velocidades lineal y angular y co-rrientes de cada motor ante las senales sinusoidales seleccionadas previamente (senalessinusoidales antihorarias con igual nivel DC y frecuencia) se presentan graficamente enla figura 3.5.
Analisis de Resultados
De la grafica de trayectoria del vehıculo (en rojo en la figura 3.5) es posible notar quemientras el voltaje de entrada es igual en los dos motores, el vehıculo se mueve enlınea recta y si el voltaje es diferente en los motores, el vehıculo gira. Ademas, estepuede cambiar su direccion de giro al pasar de tener un voltaje mayor en un motor conrespecto a otro a hacerlo menor.
Referente a las variables de posicion del vehıculo, las coordenadas x y y, se observaque presentan un comportamiento lineal mientras que las entradas son iguales, perocuando los voltajes de entrada son diferentes, su comportamiento es no lineal. Esto sehacıa evidente en la grafica de trayectoria ya que esta corresponde a y vs. x y, portanto, si el vehıculo gira, las componentes de posicion no pueden permanecer lineales.
El desplazamiento angular, por su parte, es constante si las dos entradas de voltajeson iguales, pero al tener senales de entradas sinusoidales con igual frecuencia y fasescontrarias, su comportamiento es sinusoidal. Ya que la velocidad angular es la derivadadel desplazamiento angular, su comportamiento es analogo.
La velocidad lineal se estabiliza en un valor de 0.2061 m/s con un tiempo de subidacercano a 0.1 s (tiempo entre 10 % y 90 %) y no cambia a pesar de las variaciones delas senales de entrada, debido a que se conserva constante el promedio entre las senalesde entrada.
Con respecto a la corriente, como inicialmente se aplica una senal tipo paso igual alos dos motores, el cambio de voltaje es instantaneo y provoca un pico de corriente que,en este caso es de 6.549 A en t=0.008 s y se estabiliza en un valor de 276 mA. En elmomento en que aparece la senal sinusoidal, la corriente adquiere un comportamientoigualmente sinusoidal que no lleva al circuito de entrada a consumir en ningun momentocorrientes superiores a 500 mA y que no produce picos por no experimentar cambiosbruscos de voltaje.
54
0 2 4 6 8 10 12−3
−2
−1
0
1Trayectoria y vs. x
x (m)
y(m
)
0 50 100 150−8
−6
−4
−2
0
2θ vs. t
t (s)
θ (r
ad
)
0 50 100 1500
5
10
15x vs. t
t (s)
x (
m)
0 50 100 150−3
−2
−1
0
1y vs. t
t (s)
y (
m)
0 50 100 1500
0.05
0.1
0.15
0.2
0.25vlin vs. t
t (s)
v (
m/s
)
0 50 100 150−0.5
0
0.5ω vs. t
t (s)
ω (
rad
/s)
0 50 100 1500
2
4
6
8
iL vs. t
t (s)
i L (
A)
0 50 100 1500
2
4
6
8
iR
vs. t
t (s)
i R (
A)
Figura 3.5: Resultados de desplazamiento lineal y angular, velocidades y corrientes delos motores, obtenidos bajo el escenario 2.
55

Conclusiones
El vehıculo se mueve en lınea recta siempre que los voltajes de entrada sean iguales. Sepueden hacer giros aplicando voltajes de entrada diferentes y cambiar la direccion degiro al pasar de tener un voltaje mayor en un motor con respecto a otro a hacerlo menor.
El desplazamiento angular es constante si las dos entradas de voltaje son iguales, loque supone velocidad angular de 0 rad/s, pero al tener entradas tipo sinusoidales conigual frecuencia y fases contrarias en la entrada, su comportamiento es sinusoidal.
La velocidad lineal llega a un estado estable y no cambia su valor a pesar de lasvariaciones de las senales de entrada mientras se conserve constante el promedio entrelas senales de entrada.
Dado que el vehıculo presenta una configuracion diferencial perfectamente simetri-ca en simulacion, el efecto de las velocidades angulares de cada una de las ruedas seve reflejado en la velocidad lineal del vehıculo como el promedio entre ellas, como sedescribio en el capıtulo de modelado matematico. Ası, con voltajes diferentes en losmotores, el vehıculo describe giros mientras que su velocidad lineal puede permanecercontante.
Los cambios instantaneos en los voltajes de entrada producen picos en la corriente delos motores. Cambios suaves en la corriente hacen que la corriente no genere problemasde consumo energetico.
Escenario 3. Senales de entrada constantes
Este escenario es concebido para extraer informacion de la dinamica de las senalesde velocidad lineal y angular. Se presenta a continuacion los resultados obtenidos, losanalisis y las conclusiones para las condiciones descritas en la seccion anterior.
Datos Obtenidos
A partir de la alimentacion del sistema con un voltaje constante de 0 V en el motorizquierdo y haciendo un barrido de 1 a 12 V en intervalos de 1 V en el motor derecho,se obtienen los comportamientos de las velocidades lineal y angular que se presentanen la figura 3.6.
Cuando se fija el voltaje del motor izquierdo en 12 V y se asigna al voltaje delmotor derecho valores de 1 a 12 V en intervalos de 1 V, las graficas que se obtienendel comportamiento de las velocidades lineal y angular son las que se presentan en lafigura 3.7.
56