Examples of Stationary Processes 1) Strong Sense...
18
Click here to load reader
Transcript of Examples of Stationary Processes 1) Strong Sense...

Examples of Stationary Processes
1) Strong Sense White Noise: A process ǫtis strong sense white noise if ǫt is iid with mean
0 and finite variance σ2.
2) Weak Sense (or second order or wide
sense) White Noise: ǫt is second order sta-
tionary with
E(ǫt) = 0
and
Cov(ǫt, ǫs) =
σ2 s = t
0 s 6= t
In this course: ǫt denotes white noise; σ2 de-
notes variance of ǫt. Use subscripts for vari-
ances of other things.
16

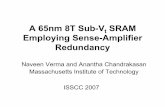
Example Graphics:
White noise: iid N(0,1) data
IID N(0,1)
0 200 400 600 800 1000
White noise: Xt = ǫt · · · ǫt+9
Wide Sense White Noise
0 200 400 600 800 1000
17

2) Moving Averages: if ǫt is white noise then
Xt = (ǫt + ǫt−1)/2 is stationary. (If you use
second order white noise you get second order
stationary. If the white noise is iid you get
strict stationarity.)
Example proof: E(Xt) =[
E(ǫt) + E(ǫt−1)]
/2 =
0 which is constant as required. Moreover:
Cov(Xt, Xs) is
Var(ǫt)+Var(ǫt−1)4 s = t
14Cov(ǫt + ǫt−1, ǫt+1 + ǫt) s = t+ 114Cov(ǫt + ǫt−1, ǫt+2 + ǫt+1) s = t+ 2
...
Most of these covariances are 0. For instance
Cov(ǫt + ǫt−1, ǫt+2 + ǫt+1) =
Cov(ǫt, ǫt+2) + Cov(ǫt, ǫt+1)
+ Cov(ǫt−1, ǫt+2) + Cov(ǫt−1, ǫt+1) = 0
because the ǫs are uncorrelated by assumption.
18

The only non-zero covariances occur for s = t
and s = t± 1. Since Cov(ǫt, ǫt) = σ2 we get
Cov(Xt, Xs) =
σ2
2 s = t
σ2
4 |s− t| = 1
0 otherwise
Notice that this depends only on |s− t| so that
the process is stationary.
The proof that X is strictly stationary when
the ǫs are iid is in your homework; it is quite
different.
19

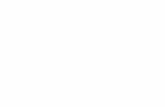
Example Graphics:
Xt = (ǫt + ǫt−1)/2
MA(1)Process
0 200 400 600 800 1000
Xt = ǫt + 6ǫt−1 + 15ǫt−2 + 20ǫt−3
+15ǫt−4 + 6ǫt−5 + ǫt−6
MA(6) Process
0 200 400 600 800 1000
20

The trajectory of X can be made quite smooth
(compared to that of white noise) by averaging
over many ǫs.
3) Autoregressive Processes:
AR(1) process X: process satisfying equations:
Xt = µ+ ρ(Xt−1 − µ) + ǫt (1)
where ǫ is white noise. If Xt is second order
stationary with E(Xt) = θ, say, then take ex-
pected values of (1) to get
θ = µ+ ρ(θ − µ)
which we solve to get
θ(1 − ρ) = µ(1 − ρ) .
Thus either ρ = 1 (later – X not stationary)
or θ = µ. Calculate variances:
Var(Xt) = Var(µ+ ρ(Xt−1 − µ) + ǫt)
= Var(ǫt) + 2ρCov(Xt−1, ǫt)
+ ρ2Var(Xt−1)
21

Now assume that the meaning of (1) is that
ǫt is uncorrelated with Xt−1, Xt−2, · · · .
Strictly stationary case: imagining somehow
Xt−1 is built up out of past values of ǫs which
are independent of ǫt.
Weakly stationary case: imagining that Xt−1 is
actually a linear function of these past values.
Either case: Cov(Xt−1, ǫt) = 0.
If X is stationary: Var(Xt) = Var(Xt−1) ≡ σ2X
so
σ2X = σ2 + ρ2σ2
X
whose solution is
σ2X =
σ2
1 − ρ2
22

Notice that this variance is negative or unde-
fined unless |ρ| < 1. There is no stationary
process satisfying (1) for |ρ| ≥ 1.
Now for |ρ| < 1 how is Xt determined from the
ǫs? (We want to solve the equations (1) to get
an explicit formula for Xt.) The case µ = 0 is
notationally simpler. We get
Xt = ǫt + ρXt−1
= ǫt + ρ(ǫt−1 + ρXt−2)...
= ǫt + ρǫt−1 + · · · + ρk−1ǫt−k+1
+ ρkXt−k
Since |ρ| < 1 it seems reasonable to suppose
that ρkXt−k → 0 and for a stationary series
X this is true in the appropriate mathematical
sense. This leads to taking the limit as k → ∞
to get
Xt =∞∑
j=0
ρjǫt−j .
23

Claim: if ǫ is a weakly stationary series then
Xt =∑∞j=0 ρ
jǫt−j converges (technically it con-
verges in mean square) and is a second order
stationary solution to the equation (1).
If ǫ is a strictly stationary process then under
some weak assumptions about how heavy the
tails of ǫ are Xt =∑∞j=0 ρ
jǫt−j converges almost
surely and is a strongly stationary solution of
(1).
In fact; if . . . , a−1, a0, a1, a2, . . . are constants
such that∑
a2j < ∞ and ǫ is weak sense white
noise (respectively strong sense white noise with
finite variance) then
Xt =∞∑
j=−∞
ajǫt−j
is weakly stationary (respectively strongly sta-
tionary with finite variance). In this case we
call X a linear filter of ǫ.
24

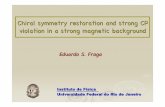
Example Graphics:
AR(1)Process: Rho=0.99
0 200 400 600 800 1000
AR(1) Process: Rho=0.5
0 200 400 600 800 1000
25

Motivation of the jargon “filter” comes from
physics.
Consider an electric circuit with a resistance R
in series with a capacitance C.
Apply “input” voltage U(t) across the two el-
ements.
Measure voltage drop across capacitor.
Call this voltage drop “output” voltage; denote
output voltage by Xt.
26

The relevant physical rules are these:
1. The total voltage drop around the circuit is
0. This drop is −U(t) plus the voltage drop
across the resistor plus X(t). (The nega-
tive sign is a convention; the input voltage
is not a “drop”.)
2. Voltage drop across resistor is Ri(t) where
i is current flowing in circuit.
3. If the capacitor starts off with no charge
on its plates then the voltage drop across
its plates at time t is
X(t) =
∫ t0 i(s) ds
C
These rules give
U(t) = Ri(t) +
∫ t0 i(s) ds
C
27

Differentiate the definition of X to get
X ′(t) = i(t)/C
so that
U(t) = RCX ′(t) +X(t) .
Multiply by et/RC/RC to see that
et/RCU(t)
RC=
(
et/RCX(t))′
whose solution, remembering X(0) = 0, is ob-
tained by integrating from 0 to s to get
es/RCX(s) =1
RC
∫ s
0et/RCU(t) dt
leading to
X(s) =1
RC
∫ s
0e(t−s)/RCU(t) dt
=1
RC
∫ s
0e−u/RCU(s− u) du
This formula is the integral equivalent of our
definition of filter and shows X = filter(U).
28

Defn: If {ǫt} is a white noise series and µ andb0, . . . , bp are constants then
Xt = µ+ b0ǫt + b1ǫt−1 + · · · + bpǫt−p
is a moving average of order p; write MA(p).
Defn: A process X is an autoregression oforder p (written AR(p)) if
Xt =p
∑
1
ajXt−j + ǫt.
Defn: Process X is an ARMA(p, q) (mixedautoregressive of order p and moving averageof order q) if for some white noise ǫ:
φ(B)X = ψ(B)ǫ
φ(B) = I −p
∑
1
ajBj
and
ψ(B) = I −p
∑
1
bjBj
Problems: existence, stationarity, estimation,etc.
29

Other Stationary Processes:
Periodic processes: Suppose Z1 and Z2 are in-
dependent N(0, σ2) random variables and that
ω is a constant. Then
Xt = Z1 cos(ωt) + Z2 sin(ωt)
has mean 0 and
Cov(Xt, Xt+h) = σ2 [cos(ωt) cos(ω(t+ h))
+sin(ωt) sin(ω(t+ h))]
= σ2 cos(ωh)
Since X is Gaussian we find that X is second
order and strictly stationary. In fact (see your
homework) You can write
Xt = R sin(ωt+ Φ)
where R and Φ are suitable random variables
so that the trajectory of X is just a sine wave.
30

Poisson shot noise processes:
Poisson process is a process N(A) indexed by
subsets A of R such that each N(A) has a Pois-
son distribution with parameter λlength(A) and
if A1, . . . Ap are any non-overlapping subsets of
R then N(A1), . . . , N(Ap) are independent. We
often use N(t) for N([0, t]).
Shot noise process: X(t) = 1 at those t where
there is a jump in N and 0 elsewhere; X is
stationary.
If g a function defined on [0,∞) and decreasing
sufficiently quickly to 0 (like say g(x) = e−x)then the process
Y (t) =∑
g(t− τ)1(X(τ) = 1)1(τ ≤ t)
is stationary.
Y jumps every time t passes a jump in Poisson
process; otherwise follows trajectory of sum of
several copies of g (shifted around in time).
We commonly write
Y (t) =
∫ ∞
0g(t− τ)dN(τ)
31

ARCH Processes: (Autoregressive Conditional
Heteroscedastic)
Defn: Mean 0 process X is ARCH(p) if
Var(Xt+1|Xt,Xt−1, · · · ) ∼ N(0, Ht)
where
Ht = α0 +p
∑
1
αiX2t+1−i
GARCH Processes: (Generalized Autoregres-
sive Conditional Heteroscedastic)
Defn: The process X is GARCH(p, q) if X has
mean 0 and
Var(Xt+1|Xt,Xt−1, · · · ) ∼ N(0, Ht)
where
Ht = α0 +p
∑
1
αiX2t+1−i +
q∑
1
βjHt−j
Used to model series with patches of high and
low variability.
32

Markov Chains
Defn: A transition kernel is a function P(A, x)
which is, for each x in a set X (the state space),
a probability on X .
Defn: A sequence Xt is Markov (with station-
ary transitions P) if
P(Xt+1 ∈ A|Xt, Xt−1, · · · ) = P(A,Xt)
That is, the conditional distribution of Xt+1
given all history to time t depends only on value
of Xt.
Fact: under some conditions as t→ ∞ Xt, Xt+1, . . .
becomes stationary.
Fact: under similar conditions can give X0 a
distribution (called stationary initial distribu-
tion) so that X is a strictly stationary process.
33