Equivalent circuits for the hunting of electrical machinery
7
Equivalent Circuits for the Hunting Electrical Machinery GABRIEL KRON ASSOCIATE AIEE Synopsis: A general method is given to establish equivalent circuits for the deter- mination of the hunting characteristics— such as damping and synchronizing torques—of standard types of electrical ma- chines. The method is illustrated by setting up steady-state and hunting equivalent cir- cuits for the salient-pole synchronous ma- chine having amortisseur windings and for the doubly fed single-phase Selsyn with un- balanced windings, special cases of which are the capacitor motor and doubly fed poly- phase motor. A companion paper, "The Doubly Fed Machine/' contains a detailed study of the characteristics of one of the equivalent circuits as measured on the a-c network analyzer. U NTIL recently the study of damping torque has been confined to syn- chronous machines and rotary converters. Operation of these machines without hunting has been obtained by the use of properly designed amortisseur or pole- face windings. Now, however, a large number of sys- tems of rotating machines are being put into use, in which altogether new and critical problems of hunting occur. In a number of cases, such as power Selsyn systems, and variable speed wind tunnel drives, exact and thorough going analysis of the hunting possibilities has been necessary before satisfactory operation could be secured. The purpose of this paper, therefore, is to present methods for more complete and ready analysis of these modern systems of interconnected rotating apparatus, so that hunting dif- ficulties can be predicted and provided for in advance of installation. The determination of the damping and synchronizing torques with standard methods involves an inordinate amount of analysis and calculation. The following equivalent circuits not only offer a clear physical picture of the interrelated phenomena taking place during small oscillations, but also enable one to get a quick numerical answer, either by the use Paper 42-3, recommended by the AIEE committee on electrical machinery, for presentation at the AIEE winter convention, New York, Ν. Y., January 26-30, 1942. Manuscript submitted October 6, 1941; made available for printing November 3, 1941. GABRIEL KRON is consulting engineer in the engi- neering general department of General Electric Company, Schenectady, Ν. Y. of the a-c network analyzer, or by stand- ard circuit methods. The only practical equivalent circuits hitherto available were those of induction machines having symmetrical windings and running at a constant speed. 1 * 2 Recently steady-state equivalent circuits have been established for machines with asymmetrical windings, such as the ca- pacitor motor, 4 also for machines with asymmetrical magnetic structure such as the salient-pole synchronous machine. 5 The extension in this paper from steady- state to hunting performance involves chiefly the application of a more complex voltage expression upon the network, and not any significant change in the network itself. By a practical equivalent circuit is understood here one that allows the deter- mination of not only the currents flowing and voltages appearing in every winding of the machine, but also the torques, as the speed or angle varies. The circuit must also allow the approximate consideration of the effect of saturation and iron loss. Results The equivalent circuits of the salient- pole alternator of Figure 1 and the neces- sary measurements to be made are shown in Figure 2, while those of the doubly fed single-phase Selsyn of Figure 3 are shown in Figure 4. Similar networks and meas- urements of other standard machines are shown on Figures 5 to 9. A detailed study of Figure 8 is undertaken in a companion paper, "The Doubly Fed Ma- Figure 1. Reference axes and constants of the synchro- nous machine chine," showing numerous performance curves measured on the a-c network analyzer. In all these equivalent circuits it should be noted that : 1. All equivalent circuits consist of a posi- tive and a negative sequence network. 2. The asymmetry in the direct and quad- rature axis windings appears as a single mutual impedance between the positive and the negative sequence network. 3. The asymmetry in the magnetic struc- ture (the saliency) appears as a single mutual impedance, not only between the sequence networks, but also between the stator and rotor windings as well. Also it should be noted thtyi: 1. The hunting networks are the same as the steady-state networks, except that the resistances are divided by different con- stants. 2. Where two hunting networks are needed in place of one, the second differs from the first only in having the frequency of hunting h replaced by —h. 3. All impressed voltages on the hunting networks are measured off the steady-state network. 4. The steady-state torques and also the damping and synchronizing torques are measured directly by a wattmeter. A Principle to Establish Models for Physical Systems In setting up steady-state and hunting equivalent circuits for the various types of machines in a systematic manner, it has been found, as was to be expected, that only such collection of terms in the equa- tions could be physically reconstructed or measured by instruments that formed a tensor. Geometric objects and other nontensor invariants could not be physi- cally represented. Vice versa, it was also found that an equivalent circuit always gave a set of equations that formed a tensor equation. It can be stated as an engineering prin- ciple that: A set of equations expressing (a) (b) Reference axes Mutual and leakage re- actances 00 (b) ' X od + "f (c) Assumed meshes and their self-reactances X kd = X ad+ J V X ad+ x p kd 290 TRANSACTIONS Kron—Equivalent Circuits ELECTRICAL ENGINEERING
Transcript of Equivalent circuits for the hunting of electrical machinery

Equivalent Circuits for the Hunting οί
Electrical Machinery
G A B R I E L K R O N A S S O C I A T E AIEE
Synopsis: A general method is given to establish equivalent circuits for the deter-mination of the hunting characteristics— such as damping and synchronizing torques—of standard types of electrical ma-chines. The method is illustrated by setting up steady-state and hunting equivalent cir-cuits for the salient-pole synchronous ma-chine having amortisseur windings and for the doubly fed single-phase Selsyn with un-balanced windings, special cases of which are the capacitor motor and doubly fed poly-phase motor. A companion paper, "The Doubly Fed Machine/' contains a detailed study of the characteristics of one of the equivalent circuits as measured on the a-c network analyzer.
UNTIL recently the study of damping torque has been confined to syn-
chronous machines and rotary converters. Operation of these machines without hunting has been obtained by the use of properly designed amortisseur or pole-face windings.
Now, however, a large number of sys-tems of rotating machines are being put into use, in which altogether new and critical problems of hunting occur. In a number of cases, such as power Selsyn systems, and variable speed wind tunnel drives, exact and thorough going analysis of the hunting possibilities has been necessary before satisfactory operation could be secured. The purpose of this paper, therefore, is to present methods for more complete and ready analysis of these modern systems of interconnected rotating apparatus, so that hunting dif-ficulties can be predicted and provided for in advance of installation.
The determination of the damping and synchronizing torques with standard methods involves an inordinate amount of analysis and calculation. The following equivalent circuits not only offer a clear physical picture of the interrelated phenomena taking place during small oscillations, but also enable one to get a quick numerical answer, either by the use
Paper 42-3, recommended by the AIEE committee on electrical machinery, for presentation at the AIEE winter convention, New York, Ν. Y. , January 26-30, 1942. Manuscript submitted October 6, 1941; made available for printing November 3, 1941.
GABRIEL KRON is consulting engineer in the engi-neering general department of General Electric Company, Schenectady, Ν. Y.
of the a-c network analyzer, or by stand-ard circuit methods.
The only practical equivalent circuits hitherto available were those of induction machines having symmetrical windings and running at a constant speed.1*2
Recently steady-state equivalent circuits have been established for machines with asymmetrical windings, such as the ca-pacitor motor,4 also for machines with asymmetrical magnetic structure such as the salient-pole synchronous machine.5
The extension in this paper from steady-state to hunting performance involves chiefly the application of a more complex voltage expression upon the network, and not any significant change in the network itself.
By a practical equivalent circuit is understood here one that allows the deter-mination of not only the currents flowing and voltages appearing in every winding of the machine, but also the torques, as the speed or angle varies. The circuit must also allow the approximate consideration of the effect of saturation and iron loss.
Results
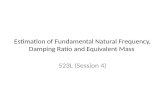
The equivalent circuits of the salient-pole alternator of Figure 1 and the neces-sary measurements to be made are shown in Figure 2 , while those of the doubly fed single-phase Selsyn of Figure 3 are shown in Figure 4 . Similar networks and meas-urements of other standard machines are shown on Figures 5 to 9. A detailed study of Figure 8 is undertaken in a companion paper, "The Doubly Fed Ma-
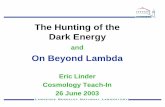
Figure 1. Reference axes
and constants of the synchro-
nous machine
chine," showing numerous performance curves measured on the a-c network analyzer.
In all these equivalent circuits it should be noted that :
1. All equivalent circuits consist of a posi-tive and a negative sequence network.
2. The asymmetry in the direct and quad-rature axis windings appears as a single mutual impedance between the positive and the negative sequence network.
3. The asymmetry in the magnetic struc-ture (the saliency) appears as a single mutual impedance, not only between the sequence networks, but also between the stator and rotor windings as well.
Also it should be noted thtyi:
1. The hunting networks are the same as the steady-state networks, except that the resistances are divided by different con-stants.
2. Where two hunting networks are needed in place of one, the second differs from the first only in having the frequency of hunting h replaced by —h.
3. All impressed voltages on the hunting networks are measured off the steady-state network.
4. The steady-state torques and also the damping and synchronizing torques are measured directly by a wattmeter.
A Principle to Establish Models for Physical Systems
In setting up steady-state and hunting equivalent circuits for the various types of machines in a systematic manner, it has been found, as was to be expected, that only such collection of terms in the equa-tions could be physically reconstructed or measured by instruments that formed a tensor. Geometric objects and other nontensor invariants could not be physi-cally represented. Vice versa, it was also found that an equivalent circuit always gave a set of equations that formed a tensor equation.
It can be stated as an engineering prin-ciple that: A set of equations expressing
(a)
( b )
Reference axes
Mutual and leakage re-
actances
00 ( b )
' Xod+ "f
( c ) Assumed meshes and their
self-reactances
Xkd = Xad+J
V X a d + x p
kd
2 9 0 T R A N S A C T I O N S Kron—Equivalent Circuits ELECTRICAL ENGINEERING

the performance of a physical system (be
it electrical, mechanical, thermal, or any
other system) may be represented by a
model (equivalent circuit) only if the equa-
tions are tensor equations. That is,
only tensors have physical existence, and
only tensors can be measured. Vice
versa, measurable physical entities al-
ways appear in the mathematical analysis
as tensors.
This principle is only a consequence of
previous statements that to explain the
behavior of a physical system in terms of
actually existing measurable physical
entities, the system must be analyzed in
terms of tensors. The equations of per-
formance of simpler systems, such as
stationary networks, automatically come
out in a tensor form, whether they are so
recognized or not, but that is not the case
in more complex phenomena, such as the
hunting of rotating machines. Tensors
appear automatically only in special
cases, while in others measurable concepts
must be introduced either by experience
or by the methods of tensor analysis.
Appendix I. Rules to Establish Equivalent Networks
The Determination of Torque on a Network
(a). When the rotor of an electrical ma-chine rotates, at any one instant, four volt-ages appear in each of its windings (if all reference axes rotate with the same speed, including zero speed)
where
β = impressed voltages
R · i =resistance drops
ΡΦ = induced voltages
ρθΒ = voltage generated by cutting the rotor
flux-density wave Β
The instantaneous torque on the rotor is the real part of
(b). ten
e = Z - i
".* = i*.G.i I T=i«B~=iaG^ß (2)
T*he voltage equation 1 may be writ-
(3)
where the transient impedance tensor is defined as
The torque then is given (in synchronous watts) by the wattmeter readings
Torque = Τ=real part of i*B = (5)
where
E=G ί (6)
It has to be remembered that :
1 . If in a product * and Ε are of different fre-quencies, then iE* is divided b y two, giving the peak of the oscillating torque.
2 . If both * and Ε are of the same frequency (in-cluding zero frequency) or if only one of them is of zero frequency, then iE* is not divided b y two.
The Equations of Small Displacements
(a). When the rotor oscillates for any cause, θ becomes 0o+ Δ0, ί becomes io+ Δί,
Z=R+Lp+peG Zaß=Riß+Läßp+peGäß (4)
In rotating machinery G, hence Ζ is asym-metrical.
If the impedance tensor Ζ is symmetrical it is often possible to establish a stationary network whose performance is also e = Z i . In all standard electrical machines it is pos-sible to introduce a transformation C that changes the asymmetrical Ζ to a sym-metrical Z ' , thereby allowing the establish-ment of an equivalent network.
The selection of the form of C depends on the desired reference frame to be employed and the desired form of the equivalent cir-cuit. Hence Cis different for different types of machines and interconnected systems.
(c). Since the equivalent network—when found with the aid of C—corresponds to the equation of voltage 1 all the individual volt-ages R-i or p$B can be found on the net-work. Hence on all equivalent networks the rotor flux-density vector Β appears as a set of differences of potential Ε (to a suit-able scale) and can be easily traced on the network by reading the components of G · ί.
e^R-i+ρφ+ρθΒ
e = R-i+pL'i+p6G'i ea^Räßiß^ä-r-p&Ba e« - Räßiß+pLäßi
ß+peGäßiß W
i'Ef*=W
ibAEb*=W2+jQ2
,7= V / ' + W
AibE0*=W*+jQ4
r . - U / i + V / . + V M - W
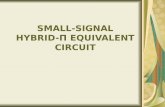
_ ( 0 3 + 0 4 ) - ( 0 1 + 0 2 )
- 7 j(Xod*X|)
j ( h E f + v e f ) 1 I
(a) (left) Steady-state network (c) Torque formulas
j ( h E b + v e b )
Φ AEf | j x o d
-7-7- j x t (b) Hunting network
Figure 2. The sali-ent-pole synchronous machine on infinité
bus
and so on, so that the above two equations become
e + Ae = Λ ( ί + Δί) +ρ(φ+ Αφ) + ρ(θ+ΑΘ)(Β+AB) (7)
Γ + A R = real part of - ( 1 + Δ ι ) * · ( Β + AB) + Μρ\θ+ΑΘ) (8)
(where now Τ represents applied torque, hence the minus sign).
Subtracting the steady-state equations and neglecting second-order infinitesimals, the equations of small displacements are
Δβ = /?· Ai+pAp+peAB+ ΑρθΒ (9)
Δ Γ = - ( ί * · AB+ Αί*·Β) + Μρ2ΑΘ (10)
(The phrase "Real part of" will be left out in the following.)
Or in terms of constants
Δβ = /?· Ai+L'pAi+peG- Δί-f ApdG-i
AT=-(i*'G'Ai+Ai*-G'i) + Mp2Ae (11)
(b). The equation of small displacement may be written as
Ae = ZAi+ApdG-i
(12)
where Ζ is defined in equation 4. Hence during small oscillations the tran-
sient impedance tensor Ζ of any machine is the same as the Ζ during constant speed. However, two sets of impressed voltages appear :
l. —ΒΑρθ representing the internal generated voltages due to cutting the steady-state rotor flux-
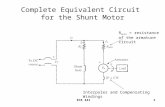
Figure 3. Reference axes of the doubly fed single-phase motor
M A Y 1 9 4 2 , V O L . 6 1 Kron—Equivalent Circuits T R A N S A C T I O N S 2 9 1

state network
e b s ® ί ̂ xmq " Xmd)
Figure 4 (left). The single-phase instru-
ment Selsyn
ci) e b r 6 - J = e b (b)(below) Huntins e b s s
e j £ i i f L networks (for torque 2
formulas see Table I)
j [ h E f - ( i - v ) e f ] ι + h- ν
j ( h E b + ( H - v ) e b ] I + h + ν
-^SUU—1—^SLr J^tl
I4h+V rr
-ΠΠΓ> w h ^ j [-hE f -( i-v)e f 1
j [ -hE b + 0+v)e b ] l -h + v
Figure 6 (right). The induction motor on unbalanced voltages
(a) (above) Steady-state network
(b)(below) Hunting networks (for torque formulas see Table I)
rr
» 1 HHP ι — I
Ύ Δ ΐ Τ Γ 1 λ *e< § Δ Ε * . Φ - ^ κ Π Γ
ed + Jeq/a
e ed-Jeg/jLJ) bs 2
i x s d -^TRP-—
(r So^Rc)/o 2-r 5d , - j X ç / a 2
j ( x S q * g
2 xSdJ
r$d - \AJLr-
l + v
Figure 5 (left). The capacitor motor
(a) (above) Steady-state network
(b)(below) Huntins networks (for torque formulas see Table I)
β $ Φ
2 r s 2 j x S ' Jxr
JXm E b
-vÄAy—1 V V j — '
)xr rr
Figure 7 (right). The single-phase induc-
tion motor
(a) (above) Steady-state network
(b) (below) Hunting networks (for torque formulas see Table I)
292 T R A N S A C T I O N S Kron—Equivalent Circuits E L E C T R I C A L E N G I N E E R I N G

's %1 + h l + h - V 23-SA
" T l ^ I ^ j ( h E - s e Δ Ε · <? i . h - v
j ( - h E - s e ) I- h - ν
density Β b y the oscillating speed change Αρθ. This voltage appears in every machine.
2. àe/άθ representing the oscillation of the steady-state impressed voltage e. This voltage appears only in slip ring machines where β is a function of 0.
Also small voltage changes Δ / may be impressed from outside.
Steady Hunting
(a). When the frequency of oscillations— say in spontaneous hunting or in driving a reciprocating load—is hœ, and p is to be re-placed by jhù)', care has to be exercised if the transient Ζ contains the complex opera-tor j. Such cases can be analytically treated by introducing an additional complex opera-tor k for p — kha' as shown in the com-panion paper "The Doubly Fed Machine." However to establish equivalent networks it is advisable to use a physical reference frame that does not introduce j in the tran-sient Z , so as to avoid using equivalent net-works with two sets of frequencies.
(b). In replacing p by jfoa1 (assuming no j in the transient Z ) two cases have to be distinguished (reference 7, page 119) de-pending on the reference frame used:
1. T h e steady-state currents ί are constant. T h e n all ρ in equation 12 are replaced b y jhi*.
2. T h e steady-state currents ί are of fundamental
β Φ
(a) Steady-state network
(b) Hunting networks (for torque formulas see Figure 8c)
Figure 9. The polyphase induction motor
Figure 8. The doubly fed polyphase induction motor
(a) (left) Steady-state network (b) (left) Hunting networks (c) (right) Torque formulas
/£*= W / A E x ' - V / i + Z Q i
/ΔΕ 2 *= W2+jQ2
T= w Δ / 1 Ε* = V / . + / 0 , Δ / 2 Ε* = WA+jQA
( Q 2 + Q 3 ) - ( Q i + Q 4 >
2h
'requency. In such a case two sets of hunting equa-tions are established:
(σ). T h e currents Δ ί are of fundamental plus hunting frequency. T h e n all ρ in Ζ are replaced b y and p in Bp ΑΘ b y jhu.
(b). T h e currents Δι are of fundamental minus hunting frequency. T h e n all p in Ζ become j ( 1 — h)ω and p in Bp ΑΘ becomes —jhca. T h a t is h assumes a negative value.
(c). The hunting-frequency electrical torque AT comes out as a complex number
bT Δ Γ = — Δ0 = ( Ts-\-jhTD) ΑΘ (13)
where Ts is the synchronizing-torque coef-ficient and TD the damping-torque coeffi-cient. If one of them is negative, the system is unstable. In calculating Ts and T& only
frame, but y is not. It is assumed that Ζ contains no j.
(b). To establish an equivalent network it is necessary to bring Ζ to a symmetrical form. Three steps are to be made:
1. Replacing Ρ b y jc* and ρθ b y νω,
Z=R+(I-jvy) jX=R + njX (17)
where η contains the speed ν as a parameter
n=I-jvy (18)
2 . Bringing Ζ to a symmetrical form consists chiefly of discovering a transformation C that changes the rotation tensor y to a diagonal form. W h e n the physical reference axes have been judiciously selected and also are a t right angles in space, one such C is that of the method of sym-metrical components
cJ-d
2«
- 1 j
1 7 = b -j (19)
AT/ΑΘ is needed, hence in the impressed voltage ΑΘ may be left out or assumed to be · any convenient constant.
If ΑΘ is given, the oscillating-frequency torque is
AT= Αθ\/ Ts
2+(hTDY (14)
(d). Once p is replaced by jhco, and so on, it is permissible to introduce a C contain-ing j .
Steps to Reduce Ζ to a Symmetrical Form
(a). In machines with sinusoidal space waves the torque tensor G may be expressed along any reference frame as
where y' — Ct*-yC. This step brings y, hence η to a diagonal form. Except for the scalars n , the matrix of Ζ is now symmetrical . Since the sequence axes are hypothetical axes, their introduction does not change the frequency of a n y quantity, and it is immaterial whether first the p& are replaced b y οΐιω and then are the sequence axes introduced or first the sequence axes are introduced, and then the ps are replaced by jhw.
3 . Dividing the equation of voltage e = Z - 1 * b y λ (or each equation b y an appropriate scalar)
•e = {n~l-R+jX)-i = Z'-i (20)
G=yL I Gaß = ya
yLyß (15)
where y is the rotation tensor. (Reference 7, page 62.) Hence the impedance tensor may be written as
Z=R+(pI+pey).L (16)
where / is the unit tensor. The tensors R, J, and L are symmetrical in any reference
Figure 10. Com-pound machines and their compound net-
works
where Z ' now is symmetrical. T h e resistances and the impressed voltages are functions of the speed v.
To find the torque, not only Ζ but also G must be transformed by C . Then œG-i — E is traced on the network. The torque is the real part of ί · E*t that is the sum of the watt-meter readings.
Steps to Establish the Steady-State Networks
1. The transient Ζ of the machine is first set up along a reference frame that gives a symmetrical Z .
2. The torque tensor G and impressed voltage vector e are also found along the same reference frame.
(a) Steady-state ma-chine and its equiva-
lent network
(b) Hunting ma-chine and its equiva-
lent network
j X ι —
rrlR
1- i*E 2 3 ' °
— ΔΙ
Δ ^ + Δ Ι ®
ι—4^-Δ ί
33 to*
n-.R
Δ Ε
Δ Τ - T s
4 j h T D
s t*. Δ Ε 4 Δ Ι * . Ε
M A Y 1 9 4 2 , V O L . 6 1 Kron—Equivalent Circuits T R A N S A C T I O N S 2 9 3

3. Replace p in Z by jœ (where ω may be zero).
4. Divide Ζ by η.
5. Establish the steady-state network.
6. The impressed voltages are e ' = π~ 1 · e.
7. The differences of potential E=œG*i are indicated on the equivalent circuit.
8. The steady-state torque is the real part of i*-E.
Steps to Establish the Hunting Networks
1. Replace p in Ζ by jœ' (where ω' is hœ or (1=*=&)ω as indicated in a previous section).
2. Divide Z b y n ' .
3. Establish the corresponding network or networks. They are the same as the steady-state network except that the re-sistances are divided by different constants n \
4. The voltages impressed on the hunt-ing networks are
Δβ' - n ' - U j h E - n ^ ' ( 2 1 ) Υ άθ Αθ/
where Ε and e' appear on the steady-state network, Af is any outside impressed volt-age change and h may be plus or minus. Also n-àe'/àe = àe/à0.
5. On the hunting network the differ-ences of potential AE—œG- Ai are deter-mined (they exist across the same junction-pairs as E).
6. The following watts W and vars Q are measured
ΑΤ/ΑΘ = W+jQ = ί· ΔΕ*-f Δί·Ε* =
Ts+jhTD (22)
7. The sum of the wattmeter readings is the synchronizing torque Ts and the sum of the varmeter readings (divided by h) is the damping torque TD.
It should be remembered that:
1. B y convention the varmeter reading W-\-jQ is ι · E* and not i* · E; hence a negative Q gives positive TD.
2. Whi l e i and Ε in the actual machine are rotating vectors i = (A - f - j B ) € ? w i ; AT, also i and Ε in the networks are single-phase quantities, » = r e a l of ( C + j - P ) W h e n the frequency of a AT ex-pression is — ω a it represents a negative Γχ>.
Hence if the frequency of Δ Γ is — « λ the varmeter reading Q keeps its sign. If AT is + ω & , the sign of Q is reversed.
3 . If a Δ Γ expression is the product of two sinusoi-dal waves, one half of the product is the torque change.
Compound Networks
Just as ordinary equations may be repre-sented physically by equivalent networks, analogously a set of tensor equations may also be represented physically by equivalent networks (see reference 6, page 480) in which each coil represents a whole network and each current represents several mesh-currents. Figure 10 shows the general form of steady-state and hunting networks for all machines in which no relative veloc-ity exists between the reference axes.
Appendix II. The Salient-Pole Synchronous Machine The Primitive Machine
Let the constants of the synchronous machine of Figure la be assumed as shown in Figures lb and c. Its Z, G, and e tensors (or those of the primitive machine with five axes) have been given in reference 7, page 42 as (using X for inductance L in per unit as is customary in the per-unit system)
G =
df dk 9k 9a
dj Tf+XrP XadP XadP
dk XadP Tkd+XkdP XadP
= <7t fkq+XkqP XaqP
da XadP XadP -xaQpe r+XdP ~XqP<>
la XadpO XadpO XaqP XdpB r+Xqp
df dk <lk da 9a
= da \ 1 — Xaq 1 \ ~Xq
Xfid 1 Xad 1 1 Xd 1
d, 9k da 9a
1 1 1 1 pde sin δ j pde cos δ 1
(23)
(24)
(25)
where δ = 0 — e b a a . All the five reference axes are rigidly attached to the field and rotate with it. (Note the change in sign ofpd.)
The machine is assumed to be connected to an infinite bus running at the same speed ρθ as the field.
Reduction to Symmetrical Form
Let symmetrical components be intro-duced by the following transformation
(26) = +i*k)/2
Pk=-j(i'k-ibk)/2
i d a = (i'a+iba)/2
If now:
1. Ct*ZC = Z', Ct*GC=G' and C * * - e = « ' are calculated,
2. p is replaced b y jh and p9 b y ν where ν is the per-unit velocity of the machine,
3 . Z' is multiplied b y n ' " 1 where the value of n ' is given in equation 2 8 .
The results are
n ' - ^ Z ' - l ^ X
df fk bk
df h bk fa
df 2
dk 1 1
9k -j j
dQ 1 1
9a -j j
(27)
df dk qk da 9a
d>
h
fr
h h
h
h h
h+v
h-v
(28)
f.
2jXad 2jXad 2jXad 2jXad
2jXad (rkd+rkq)/h+
j{Xkd+Xkq)
(rkd-rkq)/h+
J(Xad~Xaq)
J(Xad+Xaq) J(Xad~Xaq)
2jXad (rkd-rkq)/h+
J(Xad~Xaq)
(rkd+rkq)/h+
j(Xkd+Xkq)
J(Xad~Xaq) J(Xad + Xaq)
2jXad J(Xad+Xaq) J(Xad~~Xaq) 2r/(Ä+tO + j(Xd+Xq)
j(Xd-Xq)
2jXad J(Xad~Xaq) ÄXad+Xaq) j(Xd-XQ) 2r/(h-v) +
j(Xd+XQ) (29)
The same result is found if first p is replaced hy jhœ, then C is introduced.
df h bk fa ba
1 fa 2jXa„ j(Xad+Xaa) j(Xad~Xao) Λχ<!+χη) j(Xd-Xq)
4 * . -2jXa* ./( Xad Xao* — KXnd+Xao^ -j(X*-X„) -HXrf+Xr,) (30)
; = | g „ f I 1 ! jvee-lô/2 \ -jveelô/2 \
(31)
df fk bk fa ba
= | enr I 1 1 vef \ —7^7| (32)
where ef and appear on the steady-state network of Figure 2a derived in reference 5.
2 9 4 T R A N S A C T I O N S Kron—Equivalent Circuits ELECTRICAL ENGINEERING

The Hunting Equivalent Network
(a). The equivalent circuit of hunting (with per-phase constants) corresponding to Z ' is shown in Figure 2b. It is established in the same manner as the steady-state net-work shown in reference 5.
It should be noted that at least two nega-tive resistances are needed, one for each net-work. Such negative resistances may be used in conjunction with the a-c network analyzer. If no negative resistances are at hand, the networks of Figure 2 may be changed in a manner similar to that shown in reference 5, Figures 3b, 6, and 7.
(b). The components of AE—G'- ΔΓ are shown in Figure 2b.
G =
ds <9s dT <7r
* rs+Lsp Mp
Is a\rs+Lsp+Z) aMp
dr Mp αΜρθ rr+Lrp Lrpd
If -Mp6 aMp -LTpe Tr + LrP
ds dT <fr
dr aM Lr
-M - L r
ds dr 9r
=1 1 1 ear \
(33)
(39)
(40)
Δ £ = :
%ba\
d,
2jXadAi''/+j(Xad+Xal) Aiflc+j{Xad-Xm) +
j{Xd+Xa) AS'+jiXd-Xc)^"
- {2jXadAid/+j(Xad-Xall) Airk+KXai+Xaa) ^ +
j(X«—Xa) Mra+J(Xd+X«) A « * 1
G =
(33)
fr bs br
1 ' ' -jM -jLr
2 6, jM ÏLr
ft b t
AE,
bg
(34)
(c). To find the impressed voltages Δβ on the hunting network, let equation 31 be differentiated
df f* Κ fa ba
άθ~ -jvef -jveb (35)
Hence the resultant Δβ is
Δβ / be Δ Α
= n'-HjhE-- (36) Χ άθ ΑΘ/
where (if rs — rsd and ls=lSd— leakage re-actance)
Reduction to Symmetrical Form
Let symmetrical components be intro-duced by the transformation
iQ8=-j(i*-ibs)/2
i d r = (i'r+ibr)/2
i q T = - 0 r - i h r ) / 2
(44)
If the rotor is connected to the rotor of another Selsyn with infinite inertia, or with assumed constant speed
fs fr bs bT
1 *f* 1 {l-v)efTë
b
ehs (l+v)e»re-i*\
fs fr bs
(45)
br
1 *JS 1 (l-v)ef 1 ! (l+v)eb 1
Since the reference axes are stationary the frequency of the hunting currents is (l + h)œ and (1— h)o3.
1. Replacing first p by j(l+h)œ ρθ by νω, and dividing Z i ' by ηι'
Δβ =
df bk fa Κ
Aedf j( hEf+ vef) j( hEb+veb)
ΗΑΘ h+v 1 h—v (37)
fs fr b, br
l+h
1+h-v
bs l+h
b 1 + Ä + Ü
(46)
On the field an impressed hunting-fre-quency voltage Aea; m a y exist.
(d). By measuring the watts of ί * · Ε and the watts and vars of ί*· AE+ Ai*-E as shown on Figure 2c, the steady-state torque (per phase), also the damping and syn-chronizing torques are found. (Note the change in sign of TD and Ts due to that of Αρθ.)
In per unit on Figure 2a the impressed voltages je/2 and edJjXad/2rJ are 1 / V 2 .
Appendix III. The Single-Phase Instrument-Selsyn
The Primitive Machine
Let a single-phase inductipn motor be considered (Figure 3a) in which the ratio of the cross-phase to the main-phase turns is a. Let it be assumed that the im-pedances of the two stator windings differ by Z = R+Lp+\/pC. Also on both stator and rotor windings let unbalanced voltages be impressed. (To simplify the equations the saliency of the stator will be neglected here, but is considered in Figure 4.)
The transient Z, G, and β of such a ma-chine is [the primitive machine with four windings (reference 7, page 43, or reference 4)].
f. fr bs bT
Λ jXm _ z ,
2
JXm l+h — «
2 b,
Zi
2
br
1 + « + »
(47)
fs fr bs br
ds 1 1
2dr
-j/a j/a
2dr 1 1
<7r - 7 j
where the mutual impedance of the sequence axes Z\ m a y have the form
7 _ R > i X (48)
(42)
By Q* ZC, Ct*'G C, and C,*-e
2. Replacing ρ b y h)<a and dividing Zi' by 112', the resultant Zt' is the same as Z i \ except -\-h everywhere is replaced b y —h.
The same result is found if first p is re-placed by j( 1 =fc h)co then C is introduced.
fs fr bs br
fs rs+Lsp+Z/2 Mp -Z/2
1 fr M(p-jp0) rr+LT(p-jpe)
2 bs -Z/2 rs+Lsp+Z/2 Mp
br M(p+jp0) rr+L,(p+jpe)
(43)
M A Y 1 9 4 2 , V O L . 6 1 Kron—Equivalent Circuits T R A N S A C T I O N S 2 9 5

The Hunting Equivalent Networks
The corresponding two equivalent net-works are given in Figure 4b showing also AEi=o)G'- Aii and ΑΕ2 = ω&- Δί2. The saliency of the d axis is taken care of by the addition of a condenser j(Xmq—Xmd) com-mon to all four meshes, as in the case of the salient-pole synchronous machine* Figure 2b.
The voltages impressed on the hunting networks are by
Table I. Torque Formulas for the Single-Phase Motors of Figures 4 -7
%fEf*=W
if&E/i*-Wi+jQi ifAE/i+^Wi+jQt LinEf*=Wi+jQt Aif2Ef*=Wi+jQi
^ Wl + W*+W* + Wi + W* + Wi + W7 + Wt i , «
ihEh*~W" T = W' + W*
ibAEbi* = W.+jQt
ibAEb2* = Wi+jQt
AiblEb* = Wi+jQi Ait>*Eb* = Ws+jQs
(Q» + Qi + Qe+Q7)-(Qi + Q4 + Q« + Q») 2h
T D = -
(49)
Δ β / =
Δβ 2 ' =
fr bs br
j[hEf-(l-v)ef] j[hEb+(l+v)eb]
1+h+v
fr bs br
j[-hEf-(l-v)ef] j[-hEb+{l+v)eb\
1-h-v 1-h+v
(50)
(51)
The torques are the real parts of
Δ Τ = ί *·( ΑΕι + AE2) + ( ΔιΊ + Δί2) *·Ε (52)
By measuring watts and vars, the torques per phase are found by the formu-las shown in Table I.
Special Cases
1. The Capacitor Motor. The rotor-im-pressed voltages e/r and ebT are zero, Figure 5.
2. Polyphase Induction Motor on Un-balanced Voltages. Z — 0, Figure 6.
3. The Single-Phase Induction Motor. The rotor-impressed voltages are zero and Z = o o , Figure 7.
4. The Doubly Fed Induction Motor. Z = 0 and a — 1. Also ebs = ebr = 0 and the negative-sequence networks are missing, Figure 8. This case is illustrated in detail in the companion paper.3
5. The Polyphase Induction Motor. Ζ = 0, the negative-sequence networks are missing and the rotor-impressed voltage e/y is also zero, Figure 9.
Appendix IV. More General Cases of Hunting
Machines With Arbitrary Reference Frames
When a relative velocity ρθ' exists be-tween the stator and rotor reference axes (as
in interconnected slip ring machines such as Selsyns) the equation of voltage has an additional term pQ'V-i in it, so that
e = (R+Lp+peG+pe'V)-i = Z-i * (53)
The equation of hunting then is
A Î = ^ - ( G + v o - « > ] A O =
Αθ (54)
However V is not a tensor and it cannot be physically represented.
In some cases (in machines with sym-metrical structures) V may be changed into a tensor by assuming all reference axes to rotate at the same speed. But in case of interconnected synchronous machines or instrument Selsyns that assumption can-not be made.
Tensorial Form of the Hunting Equation
It is well-known that while the equation of Lagrange or its generalization, equation 53
ea = R«ßiß+a«ß—+Tßytaieiv (55)
is a tensor equation, the equation of small os-cillations (derived from it by replacing yf* by
*«+ Ax<* and i<* by i<*+ Aia) equation 54, or d(Aiß)
Δ* α =Raß AiP + aaß ^—^ + Vßy>a AiH*< + dt
rßy,ai» A P + ^ S i ß i y àxs (56)
is no longer a tensor equation. That is Ai& itself is not a vector (tensor of rank one) nor can the various terms be grouped to form tensors. Hence, no physical model (equivalent circuit) can be established to represent these equations in the general case.
The tensorial form of the equation of small oscillations of dynamical systems in general and of electrical machinery in par-ticular is9
at
K b y ß a i 5 i ^ + R y ß a i H x ^ (57)
where Koyßa is the Riemann-Christoffel curvature tensor and represent "abso-lute" or "covariant" differentials. This is the hunting equation whose equivalent cir-cuit has to be established and this is the equation that fits the hunting equivalent circuits of machines having general refer-ence axes.
References 1 . T H E I N D U C T I O N M O T O R , Behreud.
2 . E L E K T R I S C H E M A S C H I N E N , Richter. Springer, Berlin. 3 . T H E D O U B L Y F E D M A C H I N E , C . Concordia,
S . B . Crary, and Gabriel Kron . A I E E T R A N S A C -T I O N S , volume 6 1 , 1 9 4 2 , M a y section, pages 2 8 6 - 9 .
4 . E Q U I V A L E N T C I R C U I T O P T H E C A P A C I T O R
M O T O R , Gabriel K r o n . General Electric Review, September 1 9 4 1 .
5 . E Q U I V A L E N T C I R C U I T O P T H E S A L I E N T - P O L B
S Y N C H R O N O U S M A C H I N E , Gabriel Kron . General Electric Review, December 1 9 4 1 .
6 . T E N S O R S A N D F R U I T S A L A D , Joseph Slepian.
Electric Journal, February 1 9 3 7 .
7 . T H E A P P L I C A T I O N O P T E N S O R S T O T H E A N A L Y -
S I S O F R O T A T I N G E L E C T R I C A L M A C H I N E R Y , Gabriel
K r o n . General Electric Review, April 1 9 3 5 through M a r c h 1 9 3 8 . (Available also in book form.)
8 . T E N S O R A N A L Y S I S O P N E T W O R K S , Gabriel
K r o n . John W i l e y and Sons.
9 . N O N - R I E M A N N I A N D Y N A M I C S O P R O T A T I N G
E L E C T R I C A L M A C H I N E R Y , Gabriel K r o n . Journal of Mathematics and Physics, M a y 1 9 3 4 , pages 1 0 3 - 9 4 , equation 1 6 1 .
2 9 6 T R A N S A C T I O N S Kron—Equivalent Circuits E L E C T R I C A L E N G I N E E R I N G