Effective Computation of the Dynamics Around a Two ...gabern/preprints/gabernjorba05.pdf · J....
24
DOI: 10.1007/s00332-005-0663-z J. Nonlinear Sci. Vol. 15: pp. 159–182 (2005) © 2005 Springer Science+Business Media, Inc. Effective Computation of the Dynamics Around a Two-Dimensional Torus of a Hamiltonian System F. Gabern 1 and ` A. Jorba 1 1 Departament de Matem` atica Aplicada i An` alisi, Universitat de Barcelona, Gran Via 585, 08007 Barcelona, Spain E-mails: {gabern,angel}@maia.ub.es Received September 17, 2004; accepted February 9, 2005 Online publication June 13, 2005 Communicated by E. Doedel Summary. The purpose of this paper is to give an explicit analysis of the nonlinear dynamics around a two-dimensional invariant torus of an analytic Hamiltonian system. The study is based on high-order normal form techniques and the computation of an approximated first integral around the torus. One of the main novel aspects of the current work is the implementation of the symplectic reducibility of the quasi-periodic time- dependent variational equations of the torus. We illustrate the techniques in a particular example that is a quasi-periodic perturbation of the well-known Restricted Three Body Problem. The results are useful for describing the neighborhood of the triangular points of the Sun-Jupiter system. Key words. lower-dimensional tori, quasi-periodic Floquet theory, normal forms, re- ducibility 1. Introduction In this work we focus on numerical methods to describe the dynamics near an elliptic equilibrium point of a Hamiltonian system, under a time-dependent quasi-periodic pertur- bation. These methods can be applied to different physical and chemical problems where dynamical systems tools have already been shown to be of practical interest. For instance, we mention applications to mission design in astrodynamics [KLMR00], [GKL + 04], to the study of the ionization of Rydberg atoms in molecular dynamics [UJP + 02], and to the study of the stability of the Trojan asteroids in dynamical astronomy [GJ01] (the example we have used in this paper belongs to the latter field). One way to generalize
-
Upload
vuongkhuong -
Category
Documents
-
view
221 -
download
3
Transcript of Effective Computation of the Dynamics Around a Two ...gabern/preprints/gabernjorba05.pdf · J....

DOI: 10.1007/s00332-005-0663-zJ. Nonlinear Sci. Vol. 15: pp. 159–182 (2005)
© 2005 Springer Science+Business Media, Inc.
Effective Computation of the Dynamics Around aTwo-Dimensional Torus of a Hamiltonian System
F. Gabern1 and A. Jorba1
1 Departament de Matematica Aplicada i Analisi, Universitat de Barcelona, Gran Via 585,08007 Barcelona, SpainE-mails: {gabern,angel}@maia.ub.es
Received September 17, 2004; accepted February 9, 2005Online publication June 13, 2005Communicated by E. Doedel
Summary. The purpose of this paper is to give an explicit analysis of the nonlineardynamics around a two-dimensional invariant torus of an analytic Hamiltonian system.The study is based on high-order normal form techniques and the computation of anapproximated first integral around the torus. One of the main novel aspects of the currentwork is the implementation of the symplectic reducibility of the quasi-periodic time-dependent variational equations of the torus. We illustrate the techniques in a particularexample that is a quasi-periodic perturbation of the well-known Restricted Three BodyProblem. The results are useful for describing the neighborhood of the triangular pointsof the Sun-Jupiter system.
Key words. lower-dimensional tori, quasi-periodic Floquet theory, normal forms, re-ducibility
1. Introduction
In this work we focus on numerical methods to describe the dynamics near an ellipticequilibrium point of a Hamiltonian system, under a time-dependent quasi-periodic pertur-bation. These methods can be applied to different physical and chemical problems wheredynamical systems tools have already been shown to be of practical interest. For instance,we mention applications to mission design in astrodynamics [KLMR00], [GKL+04], tothe study of the ionization of Rydberg atoms in molecular dynamics [UJP+02], and tothe study of the stability of the Trojan asteroids in dynamical astronomy [GJ01] (theexample we have used in this paper belongs to the latter field). One way to generalize

160 F. Gabern and A. Jorba
the models in these autonomous examples is by considering time-dependent perturba-tions. In many situations, these perturbations are quasi-periodic. In this case the quasi-periodic Normal Form is a very interesting tool for studying these more sophisticatedmodels.
These procedures can also be adapted easily to compute center manifolds around atwo-dimensional torus. Center manifolds, also known as Normally Hyperbolic InvariantManifolds or NHIMs [Wig94], are prominent, for instance, in the construction of thephase space geometrical structures that mediate chemical reactions through a rank-1saddle (see [WBW04a], [GKMR04]), and in understanding transport phenomena inCelestial Mechanics (see [GKL+04], [ABWF03], [WBW04b], [DJK+05]).
Another practical example is related to ongoing work (see [GKM05]) on the motion ofa spacecraft near an asteroid pair. If the model for the binary is based on a stable relativeperiodic orbit and the perturbation of the Sun is taken into consideration, it is possible towrite the model for the spacecraft as a quasi-periodic perturbation of a relatively simpleautonomous model. This model has elliptic points with the corresponding “stable” neigh-borhoods. These neighborhoods can be studied in detail with the techniques developedhere. In particular, these tools allow us to find stable invariant tori suitable to “park” thespacecraft to do observations of the binary as the pair orbits around the Sun.
There are several theoretical results dealing with quasi-periodic perturbations of aHamiltonian system, which we mention in the following paragraphs. To simplify thereading, we skip most of the technical details and hypothesis, to only focus on the ideas.Full details are provided in the listed references. General references on Hamiltonianmechanics are [AM78], [AKN88], [Arn89], [MH92].
The effect of a quasi-periodic perturbation on an elliptic equilibrium point is con-sidered in [JS96], [JV97b] (see also [BHJ+03]). There, under suitable conditions, it isshown that there exists an invariant torus replacing the elliptic point. By “replacing” wemean that the torus goes to the equilibrium point when the perturbation goes to zero. Fordefiniteness, let d be the number of degrees of freedom of the Hamiltonian system and rthe number of basic frequencies of the perturbation. Under quite general conditions, thelinear dynamics around this torus can be described as the direct product of d oscillators,which come from the linear modes of the elliptic point of the unperturbed system. Thenonlinear dynamics has been considered in [JV97b], [JV01], where it is shown that foreach normal mode, there exists a one-parameter family of invariant tori of dimensionr+1 that continues the linear mode into the complete (nonlinear) system. Due to the den-sity of the resonances, this family is parametrized on a Cantor set of nearly full Lebesguemeasure. Moreover, if we select s normal modes (1 ≤ s ≤ d), there exists a s-parametricfamily of tori of dimension r + s that extends the combination of the selected modes tothe nonlinear system. Due to the Hamiltonian structure, the dimension of an invarianttorus cannot be greater than half the dimension of phase space (this is d+ r in our case).Tori of dimensions strictly lower than d + r are usually called lower-dimensional tori.The existence of lower-dimensional tori has already been considered by many authors;among them, we cite [ELi88], [Bou97], [Sev97], [Sev98].
The Lyapunov stability of a normally elliptic torus is a much more difficult topic.It is widely accepted that, if the number of degrees of freedom is larger than two,generic Hamiltonian systems do not present Lyapunov stability. This phenomenon iscalled Arnol’d diffusion since it was first conjectured by V. I. Arnol’d in [Arn64] (see

Nonlinear Dynamics Around a 2-Dimensional Torus 161
[AKN88] for a more general exposition). However, this diffusion is very small and itis possible to derive bounds that imply that, under quite general conditions, the timeto escape from the neighborhood of a linearly stable object is extremely large (see, forinstance [GDF+89], [PW94], [MG95], [JV97a], [Nie04]). In applications, the stabilityfor long time intervals is called effective stability. One advantage of this approach isthat, by means of numerical techniques, one can derive explicit bounds for concreteexamples [Sim89], [CG91], [JV98], [GJ01]. It has been used to show, for instance, thatsome asteroids are effectively stable in a simplified model for the solar system [GS97].
The example selected in this work is known as Tricircular Coherent Problem (TCCP)and models the motion of an asteroid in the Sun-Jupiter system, taking into accountperturbations coming from Saturn and Uranus. It is written as a three-degrees of freedomHamiltonian system with a perturbation that depends quasi-periodically on time, withtwo basic frequencies,
H = H0(x, y)+ εH1(x, y,�). (1)
Here, H0 denotes the unperturbed system (in our case, the Restricted Three-Body Prob-lem; see Section 1.1), H1 is the perturbation, (x, y) ∈ R3 × R3 is the configuration-momenta pair, � = (θ1, θ2) ∈ T2, θj = ωj t + θ(0)j , j = 1, 2, and = (ω1, ω2) is thevector of basic frequencies of the perturbation. Without loss of generality, the compo-nents of the vector are supposed to be linearly independent over the rationals. Thisexample is described in more detail in Section 1.1.
We focus on one of the elliptic equilibrium points of H0. The first step in our studyis the numerical computation of the 2-D torus that replaces this point in H . This torusis obtained as a truncated Fourier series with numerical coefficients. The computationis based on the approximation of an invariant curve of a suitable section of the flowby means of the methods developed in [Jor00], [CJ00], and then using the flow of thedifferential equation to obtain a representation of the 2-D torus by means of a Fourierseries depending on � = (θ1, θ2). Different approaches to computing invariant tori canbe found in [DJ95], [Sim98], [ERS00], [SOV05]. Then, the linear transformation thatreduces the linear variational flow around the torus to constant coefficients, the so-calledquasi-periodic Floquet change, is also obtained as a numerical Fourier series. To thisend, we use the method developed in [Jor01] to obtain the Floquet transformation forthe invariant curve of the section, and we globalize it by means of the variational flow toproduce the Floquet change for the 2-D torus. There are several procedures to do this,and the main difficulty here is to select one such that the produced change is a canonicaltransformation. The next step is to produce a Taylor-Fourier expansion of the HamiltonianH around the torus, in the coordinates given by the Floquet transformation. This impliesthat the expansion does not contain linear terms (because the torus is invariant) and thecoefficients of the quadratic part do not depend on� (because of the Floquet coordinates).Then, by means of the Lie series method, we construct the normal form of the Hamiltonianup to high order. To save computer memory, we follow the scheme given in [Jor99] toavoid the construction of the Lie triangle. Finally, we compute the changes of variablesthat go from the initial phase space to the normal form coordinates, and vice versa. Allthese computations are performed by a specific algebraic manipulator, written in C++by the authors, that allows us to perform the required operations. This is a generalizationof the code developed in [Jor99] and [GJ01].

162 F. Gabern and A. Jorba
Using the normal form we can describe the dynamics around the torus, and thechanges of variables allow us to send this information to the initial system. As this torusis normally elliptic, there exist invariant tori of dimensions 3, 4, . . ., d + 2 nearby thatcan easily be obtained from this normal form. Finally, we also compute an approximatefirst integral of the system to estimate the diffusion around the invariant torus. Thisallows us to derive a zone of effective stability by computing a bound on the drift of thisapproximate integral.
From a theoretical point of view, the main novelty of this work is the method forderiving the symplectic Floquet change around an invariant torus. From a more appliedpoint of view, we have shown how to combine numerical and analytical techniques togive a quite complete description of a neighborhood of a lower-dimensional torus of aHamiltonian system. There are many references dealing with the numerical descriptionof a neighborhood of a fixed point, and a few related to the vicinity of a periodic orbit (asalready mentioned elsewhere in this paper). One of our goals is to show how to extendthese techniques to describe a neighborhood of a lower-dimensional torus.
We note that the computation of a normal form around a 2-D torus of an autonomousHamiltonian system is different from the computations presented here. The main differ-ence is that, in the autonomous case, the situation is far from being perturbative: Theactions conjugated to the angles on the torus have to be defined in a neighborhood ofthe torus, and this introduces a “semiglobal” component in the construction. The samesituation occurs for periodic orbits; for more details, compare [JV98] with [SGJM95] or[GJ01].
1.1. A Model Example
We will illustrate the techniques with an example from celestial mechanics, the so-called Tricircular Coherent Problem (TCCP). This is a model for the motion of a particleunder the gravitational attraction of the Sun, Jupiter, Saturn and Uranus. The modelis based on a (numerically computed) quasi-periodic solution of the planar Four-Bodyproblem given by these bodies. This solution lies on an invariant 2-D torus for whicha representation in Fourier series is computed explicitly. The model can be written asa quasi-periodic time-dependent perturbation, with two basic frequencies, of the well-known Sun-Jupiter Restricted Three-Body Problem (RTBP, see [Sze67]). The motionof the particle is written in a frame where the Sun and Jupiter are fixed, respectively,at (µ, 0, 0) and (1 − µ, 0, 0). Saturn and Uranus are revolving with a motion close tocircular in the (x, y) plane around the center of masses of the system. The Hamiltonianis given by
HT CC P = 1
2α1(θ1, θ2)(p
2x + p2
y + p2z )+ α2(θ1, θ2)(xpx + ypy + zpz)
+α3(θ1, θ2)(ypx − xpy)+ α4(θ1, θ2)x + α5(θ1, θ2)y
−α6(θ1, θ2)
[1− µ
qS+ µ
qJ+ msat
qsat+ mura
qura
], (2)
where (x, y, z) ∈ R3 are the configuration coordinates for the particle, (px , py, pz)
are the corresponding momenta, q2S = (x − µ)2 + y2 + z2 is the square of the dis-

Nonlinear Dynamics Around a 2-Dimensional Torus 163
tance of the particle to the Sun, q2J = (x − µ + 1)2 + y2 + z2 to Jupiter, q2
sat =(x − α7(θ1, θ2))
2 + (y − α8(θ1, θ2))2 + z2 to Saturn, q2
ura = (x − α9(θ1, θ2))2 + (y −
α10(θ1, θ2))2 + z2 to Uranus, θ1 = ωsat t + θ0
1 and θ2 = ωurat + θ02 . The concrete values
of the mass parameters are µ = 9.538753600×10−4, msat = 2.855150174×10−4, andmura = 4.361228581× 10−5.
The functions αi (θ1, θ2){i=1÷10} are quasi-periodic functions that are computed by aFourier analysis of the numerical solution of the Four Body Problem (the Sun plus threeplanets), and they contain the terms of the perturbation given by Saturn and Uranus.The concrete values of the frequencies are ωsat = 0.597039074021947 and ωura =0.858425538978989. For a description of the construction of this model, as well as theconcrete values of the αi (·) functions, see [GJ04] (a file with the numerical values of theFourier coefficients can be downloaded fromhttp://www.maia.ub.es/~gabern/).
2. Normal Form around an Invariant Torus
This section discusses the details of the computation of the Floquet transformation forthe torus, and the effective computation of the normal form.
In what follows, we will use Taylor-Fourier expansions, with floating point coeffi-cients, to represent the functions involved in the computations. For the examples here,the Taylor expansions are taken up to degree 16 (because of RAM memory limits) andthe truncation of the Fourier series has been selected so that the representation erroris of the order 10−9. More concretely, we write a generic Taylor-Fourier polynomialas
P(q, p, θ1, θ2) =N∑
r=0
∑|k|=r
Nf1∑j1=−Nf1
min(Nf1− j1,Nf2 )∑j2=max( j1−Nf1 ,−Nf2 )
Pkr, j e
i( j1θ1+ j2θ2)qk1pk2,
where Pkr, j ∈ C, j = ( j1, j2) ∈ Z2, k = (k1, k2) ∈ Zd × Zd is a multi-index (k j =
(k j1 , k j
2 , . . . , k jd ), j = 1, 2) and |k| ≡ ∑d
l=1(|k1l | + |k2
l |). In the present work, we haveused the following truncation values: N = 16, Nf1 = 20, and Nf2 = 10, although insome places, we use higher accuracy, as we explicitly mention in the text. This choiceof the truncation values for the Fourier series guarantees the representation error statedabove. This is checked numerically by comparing, for instance, the truncated seriesrepresenting an invariant 2-D torus with its corresponding numerical integration. This isalso discussed in Section 2.6.
2.1. The 2-D Invariant Torus That Replaces the Elliptic Fixed Point
As mentioned before, the elliptic equilibrium points of (1) for ε = 0 become, undergeneral conditions, quasi-periodic solutions with the same frequencies as the perturbationif ε belongs to a set of positive measure (for details, see [JS96], [JV97b], [BHJ+03]). Forinstance, this implies that, if the previous hypotheses hold, the elliptic triangular pointsL4,5 [Sze67] of the RTBP are replaced by 2-D tori in the TCCP. For most of the valuesof ε, these tori are normally elliptic [BHJ+03].

164 F. Gabern and A. Jorba
0.8645
0.865
0.8655
0.866
0.8665
0.867
0.8675
-0.501 -0.5005 -0.5 -0.4995 -0.499 -0.4985 -0.498 -0.4975 -0.497-0.5005
-0.5
-0.4995
-0.499
-0.4985
-0.498
-0.4975
-0.8675 -0.867 -0.8665 -0.866 -0.8655 -0.865 -0.8645
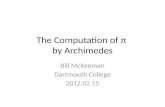
Fig. 1. Planar projections of the 2-D invariant torus that replaces L5: T5. Left: (x, y)-projection.Right: (px , py)-projection.
To compute this 2-D invariant torus, we have taken the section θ1 = 0 (mod 2π) tointroduce the map
x = f (x, θ),θ = θ + ω,
}(3)
where x ∈ R2d , θ ≡ θ2, ω = 2π(ω2ω1− 1
), and f can be evaluated from a numerical
integration of the flow associated with (1).Using the methods described in [Jor00], [CJ00], we have computed the invariant curve
of (3) that corresponds to the 2-D invariant torus that replaces L5 in the TCCP model, withan accuracy of 10−12. The 2-D torus is easily reconstructed using numerical integrationsstarting on a mesh of points on the invariant curve. Finally, a Fourier transform allowsus to compute the Fourier coefficients of a parametrization with respect to the angles(θ1, θ2). The (x, y) and (px , py) projections of the resulting invariant torus are shownin Figure 1. From now on, we will call this 2-D torus T5. Due to the symmetries of thisproblem, the same results hold for L4 so we will only discuss the L5 case.
Applying the techniques described in [Jor01], we can see that this torus is normallyelliptic, and we can obtain the three normal modes of the invariant curve. The normalmodes are the frequencies of the three harmonic oscillators that describe the normal linearmotion around the invariant torus. In Section 2.2, we discuss in detail the computationof these normal modes. In Table 1, the linear normal modes around the invariant curvecorresponding to T5 are shown.
Table 1. Linear Normal Modes around the 2-D Invariant Torus T5 in the TCCP System
j Re (λj ) ±Im (λj ) |λj | ±Arg (λj )
1 0.662315481969 0.749225067883 1.0 0.8468912686462 -0.485204809265 0.874400533546 1.0 2.0773937074593 -0.453781923686 0.891112768249 1.0 2.041801148412

Nonlinear Dynamics Around a 2-Dimensional Torus 165
2.2. Second-Order Normal Form
In the previous section we discussed the computation of the invariant object that replacesthe elliptic fixed point L5 of the RTBP when the quasi-periodic perturbation is added.By means of a quasi-periodic time-dependent translation from the origin to this 2-Dinvariant torus, one can cancel the first-order terms in the Hamiltonian. Now, we willderive a linear change of variables that depends on time in a quasi-periodic way and thatputs the second-degree terms of the Hamiltonian into a more convenient form. This is,essentially, the quasi-periodic Floquet transformation for the variational flow along thequasi-periodic orbit, but taking into account the symplectic structure of the problem. Tosimplify further steps in the normalizing process, we also apply a complexifying changeof variables that puts the second-degree terms of the Hamiltonian in the so-called diagonalform.
2.2.1. The Symplectic Quasi-Periodic Floquet Change. The linear flow around the2-D invariant torus (T5 in the example) is described by a linear system of differentialequations (the variational equations) that depends quasi-periodically on time:
z = Q(θ1, θ2)z,
θ1 = ω1,
θ2 = ω2, (4)
where z ∈ R2d and Q is a real 2d × 2d matrix.Our final goal is to find a real, symplectic and quasi-periodic change of variables,
z = Pr (θ1, θ2)x , reducing (4) to a constant system with real coefficients:
x = Bx,d
dtB ≡ 0. (5)
We will proceed in two steps: First, we will see that such a change of variables existsin the complex domain. As in our case the obtained complex matrix admits a real form,the second step will be to build a real change from the complex one (see [Jor01] for aconcrete example where this real matrix does not exist).
The entire procedure is constructive, so the implementation in a computer programwill follow easily from the explanation.
Reducibility in the Poincare section. Let us consider the θ1 = 0 (mod 2π) section ofthe flow defined by (4). Then, we have the following linear quasi-periodic skew product:
z = A(θ)z,θ = θ + ω,
}(6)
where θ ≡ θ2 and ω = 2π(ω2ω1− 1
)(in the example, ω = 2.75080755611202) is the
rotation number of the invariant curve defined by the slice θ1 = 0 (mod 2π) of the 2-Dinvariant torus. Assume that (6) can be reduced to an autonomous diagonal system,
y = �y, � = diag(λ1, . . . , λ2d),

166 F. Gabern and A. Jorba
by means of a linear transformation z = C(θ)y. We write C(θ) as (�1(θ), . . . , �2d(θ)),where �j (θ) are the columns of C(θ). Then it is clear that the couples (λj , �j ) can beobtained as the eigenvalues and eigenfunctions of the following problem.
A(θ)�j (θ) = λj�j (θ + ω), j = 1, . . . , 2d. (7)
This problem has been solved for the TCCP model with an accuracy of 10−12. See [Jor01]for more details on this computation.
Remark. As A(θ) is a real matrix, if λj and �j (θ) satisfy (7), then λ∗j and �∗j (θ) also
satisfy (7) (λ∗j and�∗j (θ) are the complex conjugates of λj and�j (θ), respectively). We
construct the matrix C(θ) as C(θ) = (�1(θ),�2(θ), . . . , �d(θ),�∗1 (θ),�
∗2 (θ), . . . ,
�∗d (θ)), where the �j are column vectors. Then, the matrix � takes the form
� = diag(λ1, λ2, . . . , λd , λ∗1, λ
∗2, . . . , λ
∗d).
The eigenfunctions �j (θ) are scaled in such a way that ‖�j‖2 = 1, where ‖V (θ)‖22 =
‖∑dk=1(vk(θ)v
∗k+d(θ) − v∗k (θ)vk+d(θ))‖2, for V (θ) = (v1(θ), v2(θ), . . . , v2d(θ))
t and‖α(θ)‖2
2 =∑
l |αl |2 for α(θ) =∑l αl eilθ , αl ∈ C.
The Change of Variables for the Flow. The next goal is to compute a quasi-periodicchange of variables z = Pc(θ1, θ2)y that transforms the flow given by (4) into
y = DB y, (8)
where DB = diag(iν1, iν2, . . . , iνd ,−iν1,−iν2, . . . ,−iνd) and νj is such that λj =exp(iνj T1), where T1 is the period related to the first frequency, T1 = 2π
ω1. Note that νj is
defined modulus integer multiples of 2πT1
. In general, we select a special value of kj ∈ Zfor each j = 1, 2, . . . , d such that the values of νj are as close as possible to the ones ofthe RTBP. This is the natural choice from a perturbative point of view and it also allowsus to obtain a symplectic transformation.
Proposition 2.1. The solution of
Pc(θ1, θ2) = Q(θ1, θ2)Pc(θ1, θ2)− Pc(θ1, θ2)DB,
θ1 = ω1,
θ2 = ω2,
with initial conditions
Pc(0) = C(θ(0)2 ),
θ1(0) = 0,
θ2(0) = θ(0)2 ,
is the linear change of variables with complex quasi-periodic coefficients that transformssystem (4) into system (8).

Nonlinear Dynamics Around a 2-Dimensional Torus 167
Proof. If we insert the change z = Pc(θ1, θ2)y into equation (4) and if we ask whether(8) is satisfied, then Pc is such that
Pc(θ1, θ2) = Q(θ1, θ2)Pc(θ1, θ2)− Pc(θ1, θ2)DB . (9)
On the other hand, we integrate equation (4) from t = 0 to t = T1 with the initial
condition{
z(0) = �j (θ(0)2 ), θ1(0) = 0, θ2(0) = θ
(0)2
}. Note that this is equivalent to ap-
plying A(θ(0)2 ) to the vector �j (θ(0)2 ). Using (7), it is easy to see that the solution of this
integration, which we denote by x(t), satisfies
x(T1) = A(θ(0)2 )�j (θ(0)2 ) = λj�j (θ
(0)2 + ω).
An elementary result in the theory of ordinary differential equations states that ifx1(t) is a solution of x1 = Q(t)x1, then x2(t) = exp(at)x1(t) is a solution of x1 =(Q(t) + aI )x1, with a being any complex number. Thus, x(t) = exp(−iνj t)x(t) is asolution of
Pcj = (Q − iνj I2d)P
cj ,
with the same initial condition (x(0) = �j (θ(0)2 )). Note that it corresponds to the first
three columns of equation (9). Moreover, it satisfies the following relation:
x(T1) = exp(−iνj Tnu)x(T1) = (λj )−1λj�j (θ
(0)2 + ω) = �j (θ
(0)2 + ω).
Realification. In order to actually implement the Floquet change, we are interested incomputing the real change of variables.
Proposition 2.2. Define the (real) matrix R by taking the real and imaginary parts ofthe columns of matrix C. Due to the particular construction of C, the last three columnsare the conjugate values of the first three:
R(θ) = 1
2C(θ)
(Id −i Id
Id i Id
).
Then the solution of
Pr (θ1, θ2) = Q(θ1, θ2)Pr (θ1, θ2)− Pr (θ1, θ2)B,
θ1 = ω1,
θ2 = ω2, (10)
with initial conditions
Pr (0) = R(θ(0)2 ),
θ1(0) = 0,
θ2(0) = θ(0)2 ,
defines a real linear quasi-periodic change of variables, z = Pr (θ1, θ2)x, that transformssystem (4) into system (5). Moreover, this change of variables is canonical.

168 F. Gabern and A. Jorba
The real matrix B, defined as B = R−1C DBC−1 R, does not depend on (θ1, θ2) andtakes the form
B =
0 0 · · · 0 ν1 0 · · · 00 0 · · · 0 0 ν2 · · · 0...
.... . .
......
.... . .
...
0 0 · · · 0 0 0 · · · νd
−ν1 0 · · · 0 0 0 · · · 00 −ν2 · · · 0 0 0 · · · 0...
.... . .
......
.... . .
...
0 0 · · · −νd 0 0 · · · 0
.
Proof. Define the matrix Pr in the following way:
Pr (θ1, θ2) = Pc(θ1, θ2)C−1(θ1, θ2)R(θ1, θ2), (11)
where R(θ1, θ2) and C(θ1, θ2) are, respectively, the extensions of the matrices R(θ) andC(θ). Then, we have
• Pr (0) is a real matrix: Pr (0) = Pc(0)C−1(θ(0)2 )R(θ(0)2 ) = C(θ(0)2 )C−1(θ
(0)2 )R(θ(0)2 ) =
R(θ(0)2 ).• If we integrate Pr = Q Pr − Pr B with Pr (0) = R(θ(0)2 ) as an initial condition, then
Pr (θ1, θ2) is real ∀(θ1, θ2) ∈ T2.• If we insert the relation (11) into the differential equation (10), we obtain
PcC−1 R + Pc(C−1)R + PcC−1 R = Q PcC−1 R − PcC−1 RB.
By multiplying this equation on the right-hand side by the matrix R−1C , we get
Pc + P(C−1)C + PcC−1 R R−1C = Q Pc − Pc DB .
This equation holds, and corresponds to equation (9), provided that
Pc(C−1)C + PcC−1 R R−1C = 0.
It is easy to see, by using the definition of R, that this equality is true:
Pc(C−1)C + PcC−1 R R−1C = 0 ⇐⇒(C−1)R + C−1 R = 0 ⇐⇒
d
dt(C−1 R) = 0.
Finally, to ensure that the transformation is canonical, we need only to check thatPr (θ1, θ2) is a symplectic matrix. This can be proved (see [GJMS01b]) by extending thematrix Pr to the phase space of the autonomous Hamiltonian
Hext(x, y, θ1, θ2, pθ1 , pθ2) = ω1 pθ1 + ω2 pθ2 + H(x, y, θ1, θ2),
where (x, y) ∈ Rd × Rd , pθk is the conjugate momentum of θk and H(·) is given byequation (1).

Nonlinear Dynamics Around a 2-Dimensional Torus 169
In our example, to check the correctness of the software, we have tested numericallythat Pr (θ1, θ2) is symplectic on a mesh of values of (θ1, θ2), with an agreement of theorder of the truncation of the Fourier series.
If we apply this quasi-periodic change of variables, the second-degree terms of theHamiltonian become
Hr2 (x, y) = 1
2ν1(x
21 + y2
1)+1
2ν2(x
22 + y2
2)+1
2ν3(x
23 + y2
3), (12)
where the frequencies νj are the normal frequencies of the torus T5. In the TCCP system,they take the values ν1 = −0.080473064872369, ν2 = 0.996680625156409, andν3 = 1.00006269133083.
2.2.2. Complexification. As is usual in these types of computation, we use a complex-ifying change of variables to bring (12) into a diagonal form. The equations of this linearand symplectic transformation are
xj = qj + i pj√2
, yj = iqj + pj√2
, j = 1, 2, 3.
Thus, after composing the three linear symplectic changes of variables (translationof the origin to the 2-D invariant torus, quasi-periodic symplectic transformation, andcomplexification), the second order of the Hamiltonian takes the form
H2(q, p) = H c2 (q, p) = iν1q1 p1 + iν2q2 p2 + iν3q3 p3, (q, p) ∈ C6. (13)
2.3. Expansion of the Hamiltonian
To proceed with the algorithm that constructs the normal form, we need to produce aconvergent Taylor-Fourier expansion of Hamiltonian (1), in the complex coordinatesused to derive (13),
H =N∑
n=2
Hn(q, p, θ)+ RN+1(q, p, θ),
where Hn , n ≥ 2, denotes a homogeneous polynomial of degree n in the variables q andp, H2(q, p, θ) = H2(q, p) is given by (13), and θ = (θ1, θ2) ∈ T2.
To produce the expansion in our particular example, we need only to expand the termsof the potential of the TCCP Hamiltonian (2). They are of the form
1
sl= 1√
(x − xl(θ))2 + (y − yl(θ))2 + z2,
where (x, y, z) ∈ R3 and l stands for S (the Sun), J (Jupiter), sat (Saturn), or ura(Uranus). From the generating function of the Legendre polynomials [AS72],
1√1− 2στ + τ 2
=∞∑
n=0
Pn(σ )τn,

170 F. Gabern and A. Jorba
where Pn is the Legendre polynomial of degree n; and, taking
σ = xl(θ)x + yl(θ)y√x2
l (θ)+ y2l (θ)
√x2 + y2 + z2
and τ =√
x2 + y2 + z2
x2l (θ)+ y2
l (θ),
it is possible to expand the nonlinear terms as
1
sl=
∞∑n=0
Aln(x, y, z, θ) =
∞∑n=0
[1
x2l (θ)+ y2
l (θ)
] n+12 (
x2 + y2 + z2) n
2 Pn(σ ),
where Aln denotes a homogeneous polynomial of degree n, whose coefficients are quasi-
periodic functions of θ = (θ1, θ2) ∈ T2 and can be computed recurrently using
Aln+1 =
1
x2l (θ)+ y2
l (θ)
[2n + 1
n + 1(xl(θ)x + yl(θ)y)A
ln −
n
n + 1(x2 + y2 + z2)Al
n−1
],
(14)for n ≥ 1. The recurrence can be started using the values
Al0 =
1√x2
l (θ)+ y2l (θ)
, Al1 =
xl(θ)x + yl(θ)y
(x2l (θ)+ y2
l (θ))3/2,
and can be derived easily from the recurrence of the Legendre polynomials.The expansion of the Hamiltonian is implemented as follows. First, the transla-
tion to the torus T5 is composed with the Floquet transformation and the resultingaffine transformation is substituted in (14). Thereafter it is not difficult to use theserecurrences to obtain the expansion up to a given order. The remaining terms of theHamiltonian, monomials of degrees 1 and 2 in (2), are easily added by simply insert-ing the above-mentioned affine transformation. This strategy for the expansions hasalready been used in several places (see, for instance, [SGJM95], [JM99], [GJMS01a],[GJMS01b], [GJ01]).
On the other hand, it is also convenient to add the momenta corresponding to theangular variables. If we denote it as pθ = (pθ1 , pθ2) ∈ C2, it is possible to write theexpanded Hamiltonian in complex variables as
H(q, p, θ, pθ ) = 〈, pθ 〉 + H2(q, p)+∑n≥3
Hn(q, p, θ), (15)
where (q, p) ∈ C2d , θ ∈ T2, H2(q, p) is given by (13), = (ω1, ω2), and 〈·, ·〉 is theEuclidean scalar product.
2.4. Normal Form of Order Higher Than 2
The previous expansion has been obtained in coordinates such that the Hamiltonian startsat degree 2 for the spatial variables, and that degree 2 term is already in complex normalform (13).

Nonlinear Dynamics Around a 2-Dimensional Torus 171
The goal of the normalizing transformation is to eliminate the maximum numberof terms of the expansion of the Hamiltonian. We basically use the Lie series methodimplemented as described in [Jor99], but introducing the necessary modifications inorder to deal with quasi-periodic coefficients.
For completeness, we describe one step of the normalizing process. Suppose that theHamiltonian is already in normal form up to degree r − 1,
H = 〈, pθ 〉 + H2(q, p)+r−1∑j=3
Hj (q, p)+ Hr (q, p, θ)+ Hr+1(q, p, θ)+ · · · ,
where Hr (q, p, θ) = ∑|k|=r hk
r (θ1, θ2)qk1pk2
, hkr (θ1, θ2) =
∑j=( j1, j2)
hkr, j e
i( j1θ1+ j2θ2)
and k = (k1, k2) ∈ Zd × Zd is a multi-index.We will make a change of variables that suppresses the maximum number of mono-
mials and removes the dependence on θ1 and on θ2 in the terms of order r , Hr , of theHamiltonian expansion. The canonical transformation that accomplishes this purpose isgiven by the following generating function:
Gr = Gr (q, p, θ) =∑|k|=r
gkr (θ1, θ2)q
k1pk2,
where the coefficients are given by
gkr (θ1, θ2) =
∑
j=( j1, j2)
hkr, j e
i( j1θ1+ j2θ2)
i( j1ω1 + j2ω2 −⟨ν, k2 − k1
⟩)
if k1 �= k2,
∑j=( j1, j2)�=(0,0)
hkr, j e
i( j1θ1+ j2θ2)
i( j1ω1 + j2ω2)if k1 = k2,
In general, one should check that the frequencies ω1, ω2, ν1, ν2, . . . , νd are not inresonance up to the order of the computations. Otherwise we will have a zero divisor,which implies that this resonant term cannot be eliminated.
In our example, the frequencies of the normal linear oscillations around the 2-Dinvariant torus T5, ν = (ν1, ν2, ν3), and the intrinsic frequencies of the system,ω1 = ωsat
and ω2 = ωura , are not in resonance up to the order considered. That is, we check atevery step of the process that j1ω1 + j2ω2 − 〈ν, k〉 �= 0, j = ( j1, j2) ∈ Z2, k ∈ Z3\{0},with | j | and |k| up to the orders we have worked with.
Now, the new Hamiltonian H ′ obtained with such a generating function,
H ′ = H + {H,Gr } + 1
2!{{H,Gr } ,Gr } + · · · ,
does not depend on the variables θ1 and θ2 up to degree r . Here, {·, ·} denotes the canonicalPoisson bracket. Thus H ′ is in normal form up to degree r :
H ′ = 〈, pθ 〉 + H2(q, p)+r−1∑j=3
Hj (q, p)+ H ′r (q, p)+ H ′
r+1(q, p, θ)+ · · · .

172 F. Gabern and A. Jorba
Table 2. Coefficients of the normal form, up to degree 3 in the actions for the TCCP case. Thefirst three columns contain the exponents of the actions, and the fourth and fifth columns are thereal and imaginary parts of the coefficients. Imaginary parts must be zero, but they are not due tothe different accumulation errors (basically, the one that comes from the truncation of the Fourierseries).
k1 k2 k3 Re (hk) Im (hk)
1 0 0 -8.0473064872368966e-02 0.0000000000000000e+000 1 0 9.9668062515640865e-01 0.0000000000000000e+000 0 1 1.0000626913308270e+00 0.0000000000000000e+002 0 0 5.6008074695424814e-01 9.9022635266146223e-141 1 0 -1.5539627415430354e-01 1.9737284347219547e-140 2 0 5.5093985824138381e-03 -3.4515403004164990e-161 0 1 5.4161903856716140e-02 2.6837558280952768e-150 1 1 6.6103538676104013e-03 -2.3704452239135327e-160 0 2 -3.4144388415478051e-04 1.3980906058550924e-203 0 0 1.7078141909448842e+01 7.0030369427282057e-092 1 0 2.5316327595194634e+00 5.6348897124143457e-091 2 0 1.2040309679987733e+00 2.4234795726771734e-100 3 0 -1.7159208395247699e-03 8.2745567480971449e-122 0 1 -2.0884357984263224e-01 2.7145888846396389e-101 1 1 1.3097591687221137e+00 8.5687025776165656e-110 2 1 -8.7878491487452266e-03 1.1230163355821964e-121 0 2 -3.8394291301547680e-02 4.9155879462758908e-120 1 2 -8.1852662066825860e-03 2.9493958070531223e-130 0 3 4.8084373364571027e-04 4.1626694220605631e-14
After making these changes up to a suitable degree n = N , the Hamiltonian takes theform
H = 〈, pθ 〉 +N (q1 p1, q2 p2, . . . , qd pd)+R(q, p, θ1, θ2), (16)
where N denotes the normal form (which depends only on the products qj pj ) andR isthe remainder (of order greater than N ).
Finally, we write the normal form N in real action-angle coordinates. This can beachieved easily by using the canonical transformation,
qj = I 1/2j exp(iϕj ), pj = −i I 1/2
j exp(−iϕj ), j = 1, 2, . . . , d.
It is not difficult to see that N , in these coordinates, does not depend on the angles ϕj
but only on the actions Ij ,
N =[N /2]∑|k|=1
hk I k11 I k2
2 . . . I kdd , k ∈ Zd , hk ∈ R. (17)
Values for the coefficients hk up to order N = 6 for our particular case of the TCCPsystem can be found in Table 2. As has been mentioned before, these computations havebeen performed up to order N = 16.

Nonlinear Dynamics Around a 2-Dimensional Torus 173
2.5. Changes of Variables
We have also computed explicit expressions for the transformation from the initial vari-ables of (1) to the normal form variables and its inverse. As usual, these changes ofvariables can be written as a truncated Taylor-Fourier series, with the same truncationvalues as the Hamiltonian. They will be used to send information from the normal formcoordinates to the initial ones, and vice versa.
2.6. Local Nonlinear Dynamics
Close enough to the 2-D invariant torus that replaces the equilibrium point, the nonlineardynamics can be described accurately by the truncated normal form (17). As this is anintegrable normal form, the dynamics is very simple: The phase space is completelyfoliated by a d-parametric family of invariant tori, parametrized by the actions I . Oneach torus I = I0, there is a linear flow with a given frequency�(I0). If these frequenciesare linearly independent over the rationals, then the torus I = I0 is filled densely byany trajectory starting on it. If the frequencies are linearly dependent over the rationals,then the orbits on this torus are not dense: If there are �i independent frequencies, thetorus I = I0 contains a (d−�i )-parametric family of �i dimensional tori, each one beingdensely filled by any trajectory starting on it. These tori of dimension �i are the lowerdimensional tori, while the tori of dimension d are the maximal dimensional ones.
The diffusion due to the remainder has been studied widely in the literature (see[GDF+89], [Sim89], [JV98], [GJ01] and references therein), so we will omit furtherdiscussion of this topic. As we want to use the tori of the normal form as approximationsto invariant tori for the complete system, we need a procedure to estimate their accuracy.One possibility is to estimate the size of the remainder (see, for instance, [JV98] or[GJ01]), but here we have chosen a more straightforward approach: Given a torus innormal form, we can tabulate an orbit on it, send this table to the coordinates of theinitial Hamiltonian (2), and check if each point is obtained from a numerical integrationof the previous one. The integration time is taken equal to 0.1, because we do not wantthe integration error to interfere with the test. For tori sufficiently close to the origin ofthe normal form, this test is passed within an accuracy of the same order as the truncationof the Fourier series, that is, 10−9. All the tori displayed in this section have passed thistest.
Therefore, we can easily compute lower and maximal invariant tori using the truncatednormal form and send them, via the change of variables, to the initial coordinates of thesystem. This change of variables adds two additional frequencies (the system’s intrinsicfrequencies, ω1 and ω2) to the invariant tori.
Figures 2 through 7 are examples of these computations for the TCCP system. Moreconcretely, Figures 2 and 3 are obtained by setting I1 = I2 = 0 and I3 = I (0)3 in (17),for some (small) value I (0)3 > 0. This is a periodic Lyapunov orbit of the autonomousnormal form N in (16) that corresponds to a three-dimensional torus for the initialHamiltonian (2). This 3-D torus belongs to the Lyapunov family of the 2-D torus T5
(see [JV97b]), and their normal frequencies are ∂N∂ Ij(0, 0, I (0)3 ), j = 1, 2, where N
is taken from (17). Figures 4 and 5 have been obtained in a similar way, but settingI2 = I3 = 0, I1 = I (0)1 , and I1 = I3 = 0, I2 = I (0)2 , respectively. In the coordinates

174 F. Gabern and A. Jorba
0.864
0.8645
0.865
0.8655
0.866
0.8665
0.867
0.8675
-0.501 -0.5005 -0.5 -0.4995 -0.499 -0.4985 -0.498 -0.4975 -0.497-0.04
-0.03
-0.02
-0.01
0
0.01
0.02
0.03
0.04
-0.04 -0.03 -0.02 -0.01 0 0.01 0.02 0.03 0.04
Fig. 2. Projection on the (x, y) (left) and on the (z, pz) (right) planes of an elliptic three-dimensional invariant torus near T5. The intrinsic frequencies areωsat ,ωura , andν3 = 1.000062350.The normal ones are ν1 = −0.08044599352 and ν2 = 0.9966839283. This invariant torus is gen-erated by setting I (0)1 = I (0)2 = 0 and I (0)3 = 0.0005.
of the initial Hamiltonian (2), these two tori are contained in the plane z = pz = 0.Figure 6 displays two projections of a four-dimensional invariant torus near T5. Finally,in Figure 7, two different projections of a five-dimensional invariant torus are shown.These graphs have been obtained computing 10,000 points on a single orbit on the torus,with a time step of 0.1 units. See the captions for more details.
We note that, in this way, it is also possible to compute quasi-periodic orbits witha prescribed set of frequencies �0, provided that �0 belongs to the domain where thenormal form is accurate. The procedure is based on solving the equation ∇N (I ) = �0
by means of, for instance, a Newton method.
-0.501-0.5005 -0.5 -0.4995-0.499-0.4985-0.498-0.4975-0.497 0.864 0.8645
0.865 0.8655
0.866 0.8665
0.867 0.8675
-0.04-0.03-0.02-0.01
0 0.01 0.02 0.03 0.04
Fig. 3. Projection on the configuration space of the three-dimensional invariant torusshown in Figure 2.

Nonlinear Dynamics Around a 2-Dimensional Torus 175
0.85
0.855
0.86
0.865
0.87
0.875
0.88
0.885
-0.53 -0.52 -0.51 -0.5 -0.49 -0.48 -0.47-0.885
-0.88
-0.875
-0.87
-0.865
-0.86
-0.855
-0.85
0.85 0.855 0.86 0.865 0.87 0.875 0.88 0.885
Fig. 4. Projections on the (x, y) (left) and (y, px ) (right) planes of an elliptic three-dimensionalinvariant torus. The intrinsic frequencies areωsat ,ωura , and ν1 = −0.08046185813, and the normalones are ν2 = 0.9966790714, and ν3 = 1.000063233. This invariant torus is generated by settingI (0)2 = I (0)3 = 0 and I (0)1 = 0.00001.
0.85
0.855
0.86
0.865
0.87
0.875
0.88
0.885
-0.52 -0.515 -0.51 -0.505 -0.5 -0.495 -0.49 -0.485 -0.48 -0.475-0.515
-0.51
-0.505
-0.5
-0.495
-0.49
-0.485
-0.88 -0.875 -0.87 -0.865 -0.86 -0.855 -0.85
Fig. 5. Projections on the (x, y) (left) and (px , py) (right) planes of an elliptic three-dimensionaltorus. The intrinsic frequencies are ωsat , ωura , and ν2 = 0.9966811761, and the normal onesare ν1 = −0.08048083167 and ν3 = 1.000063022. This invariant torus is generated by settingI (0)1 = I (0)3 = 0 and I (0)2 = 0.00005.
-0.52-0.515-0.51-0.505 -0.5 -0.495-0.49-0.485-0.48-0.475 0.85 0.855
0.86 0.865
0.87 0.875
0.88 0.885
-0.015
-0.01
-0.005
0
0.005
0.01
0.015
-0.88-0.875
-0.87-0.865
-0.86-0.855
-0.85-0.515-0.51
-0.505-0.5
-0.495-0.49
-0.485
-0.015
-0.01
-0.005
0
0.005
0.01
0.015
Fig. 6. Projections on the (x, y, z) (left) and (px , py, pz) (right) spaces of a four-dimensional torusnear T5. The intrinsic frequencies are ωsat , ωura , ν2 = 0.9966811761, and ν3 = 1.000063022, andthe normal one is ν1 = −0.08048083168. This invariant torus is generated by setting I (0)1 = 0,I (0)2 = 0.00005 and I (0)3 = 0.0001.

176 F. Gabern and A. Jorba
0.83
0.84
0.85
0.86
0.87
0.88
0.89
0.9
-0.55 -0.54 -0.53 -0.52 -0.51 -0.5 -0.49 -0.48 -0.47 -0.46 -0.45-0.015
-0.01
-0.005
0
0.005
0.01
0.015
-0.015 -0.01 -0.005 0 0.005 0.01 0.015
Fig. 7. Projections on the (x, y) (left) and (z, pz) (right) planes of a five-dimensional torus nearT5. The frequencies are ωsat , ωura , ν1 = −0.08046420047, ν2 = 0.9966802858, and ν3 =1.000063496. This invariant torus is generated by setting I (0)1 = 0.00001, I (0)2 = 0.00005, andI (0)3 = 0.0001.
3. Approximate First Integral of the Initial Hamiltonian
A first integral of a Hamiltonian system H(q, p, θ) is a function F(q, p, θ) that isconstant on each orbit of the system. Functions having a small drift along the orbits areusually called “approximate first integrals” or “quasi-integrals” [GG78], [Mar80]. Oneof the main applications of approximate first integrals is to bound the rate of diffusionin certain regions of the phase space [CG91], [GJ01].
3.1. Computing a Quasi-Integral
It is not difficult to see that, if F(q, p, θ) is a first integral, then
{H, F} = 0. (18)
Here we will try to solve this equation by expanding H and F in Taylor-Fourier series,in the same coordinates used to obtain (15). That is, we suppose that H is expanded incomplex coordinates, as in the normal form up to degree 2. Let us write F as a truncatedFourier-Taylor expansion,
F(q, p, θ1, θ2) =N∑
n=2
Fn(q, p, θ1, θ2),
where, as usual, Fn stands for a homogeneous polynomial of degree n in the variables(q, p), with coefficients that are truncated Fourier series in the angles θ1 and θ2:
Fn(q, p, θ1, θ2) =∑|k|=n
∑j=( j1, j2)
(f kn, j e
i( j1θ1+ j2θ2))
qk1pk2.
To compute the coefficients of this expansion, f kn, j ∈ C, we solve equation (18) order
by order. It is easy to see that there is some freedom while selecting the degree 2 of F ,F2. As our final goal is to bound the diffusion using this quasi-integral, a good choice is

Nonlinear Dynamics Around a 2-Dimensional Torus 177
(see [GJ01])
F2 = id∑
j=1
qj pj .
With this choice, the Hessian of the realification of F at the origin is a positive-definitematrix. This implies that, near the origin, the level curves of F are compact surfaces.
As for higher degrees, n > 2, it is possible to obtain f kn, j recursively,
f kn, j =
ickn, j
j1ω1 + j2ω2 −⟨k2 − k1, ν
⟩ ,where ν = (ν1, ν2, . . . , νd) and ck
n, j can be computed from the expansion of the Hamil-tonian and the previously computed coefficients of F .
During the computations, two conditions must be verified at every step of the process:
(a) ω1, ω2, and ν must satisfy that
j1ω1 + j2ω2 − 〈k, ν〉 �= 0,
∀ ( j1, j2) ∈ Z2, ∀ k ∈ Zd such that | j | + |k| �= 0,
(b) if j1 = j2 = 0 and k1 = k2, the value ckn, j must vanish.
The first is the same nonresonance condition needed for the normal form computationand it depends only on the normal and internal frequencies of the torus. The secondcondition has to be checked before the computation of each Fj . In our example, thissecond condition is satisfied in all the cases. For a discussion of condition (b), see [CG91].
In the model example, we have used the recurrence relation to compute the approxi-mate first integral truncated at order N = 16.
3.2. Bounding the Diffusion
As F is not an exact first integral, the variation of the values of F on a given trajectoryof the Hamiltonian is not exactly zero. The variation can be written, in terms of theHamiltonian expanded in real coordinates H(x, y, θ, pθ ) and in terms of the realifiedquasi-integral F(x, y, θ), as
F = {F(x, y, θ), H(x, y, θ, pθ )} ,
where (x, y) ∈ Rd × Rd and, as usual, pθ = (pθ1 , pθ2) are the momenta correspondingto the angles θ = (θ1, θ2) ∈ T2. Then it is easy to see that the diffusion can be estimatedby bounding the following expansion:
F =∑n>N
N∑l=3
{Fl , Hn−l+2} +∑n>N
{F2, Hn} .
We will use the same procedure as in [GJ01]. Thus, we use lemmas in [GJ01] and[CG91] to estimate the size of the terms of the Hamiltonian that have not been numerically

178 F. Gabern and A. Jorba
computed, i.e., those homogeneous polynomials with degree greater than N . The normsappearing in the lemmas should be modified in order to deal with two angles, but it iseasy to see that the lemmas are still valid. A bound for the drift of the formal first integralF is obtained by means of the following:
Lemma 3.1. Let N and N be integers such that 3 ≤ N ≤ N and
‖Hk‖ ≤ Sk, 3 ≤ k ≤ N ,
‖Hk‖ ≤ hk−N+1 E, k > N ,‖Fk‖ ≤ Qk, 3 ≤ k ≤ N .
Then, if hρ < 1,
‖F‖ρ ≤ R(ρ),where
R(ρ) =N−2∑j=1
( j + 2)ρ j Qj+2
∑N− j<l≤N
lρl Sl
+N−2∑j=1
( j + 2)ρ j Qj+2E
hNh(N + 1)(hρ)N+1 − N (hρ)N+2
(1− hρ)2+
+∑
N<l≤N
lρl Sl + E
hNh(N + 1)(hρ)N+1 − N (hρ)N+2
(1− hρ)2.
Proof. See [CG91] and [GJ01].
In order to find a region of effective stability, we define the following compact domainof the phase space:
Dρ ={(x, y) ∈ R2d ;
d∑j=1
(x2j + y2
j ) ≤ ρ2
}.
Assume that we have an initial condition (x(0), y(0)) inside the domain Dρ0 . We areinterested in values ρ > ρ0 such that the orbit (x(t), y(t)) is contained in Dρ for allt ∈ [0, TS], where TS is the (finite) lifetime of the physical system considered. A sufficientcondition to achieve this is
|F2(x(t), y(t))− F2(x(0), y(0))| ≤ 1
2(ρ2 − ρ2
0), 0 ≤ t ≤ TS, (19)
where F2(x, y) = 12
∑dj=1(x
2j + y2
j ).Let us now define
�N (ρ0, ρ) = 1
2(ρ2 − ρ2
0)−N∑
j=3
‖Fj‖(ρ j + ρ j0 ).
It is easy to see that, if �N (ρ0, ρ) ≥ 0 and
|F(x(t), y(t), θ(t))− F(x(0), y(0), θ(0))| ≤ �N (ρ0, ρ),

Nonlinear Dynamics Around a 2-Dimensional Torus 179
0.8645
0.865
0.8655
0.866
0.8665
0.867
0.8675
-0.501 -0.5005 -0.5 -0.4995 -0.499 -0.4985 -0.498 -0.4975 -0.497
Fig. 8. Projection on Jupiter’s plane of motion, (x, y), of the region ofeffective stability around the 2-D invariant torus T5.
then (19) holds. The function �N (ρ0, ρ) is used to bound the maximum variation ofF(x, y, θ) on the interval of time [0, TS] because (19) is a sufficient condition for thetrajectory to be inside the domain Dρ . Note that, due to the particular form of �N , thevalues ρ0 and ρ have to be sufficiently small to make �N (ρ0, ρ) ≥ 0 but, on the otherhand, we want �N to be as large as possible, to allow a large variation of F with acontrolled variation of ρ. Hence, we will carefully select the values ρ0 and ρ to obtainthe largest region of effective stability for time TS .
So, if�N (ρ0, ρ) ≥ 0, we can bound the escape time as a function of the initial radius,
T (ρ0) = supρ
�N (ρ0, ρ)
R(ρ) , (20)
whereR(ρ) is given in Lemma 3.1.In the TCCP system, we have solved equation (20) for different values of ρ0, and
using inverse interpolation we have found the initial radius ρ0 for which an orbit doesnot leave the domain Dρ in a time span of length TS = 3× 109 (the estimated age of thesolar system in adimensional units). The result obtained here is ρ0 = 1.7565 × 10−4,and the maximal final radius is ρ = 4.9666× 10−4. We note that the region Dρ0 in thephysical space of the TCCP is qualitatively different from the effective stability zonesobtained with other models, such as the RTBP model (for example, in [Sim89], [CG91],[SD00]), the Bicircular Coherent Problem in [GJ01] and the Elliptic RTBP in [Gab03].It can be seen as the subset of the phase space when a ball of radius ρ0 “travels” alongthe invariant torus T5. The projection of this region of effective stability into Jupiter’splane of motion is shown in Figure 8.
Acknowledgments
This work was supported by the MCyT/FEDER grant BFM2003-07521-C02-01, theCIRIT grant 2001SGR–70, and DURSI.

180 F. Gabern and A. Jorba
References
[ABWF03] S. A. Astakhov, A. D. Burbanks, S. Wiggins, and D. Farrelly. Chaos-assisted captureof irregular moons. Nature, 423:264–267, 2003.
[AKN88] V. I. Arnold, V. V. Kozlov, and A. I. Neishtadt. Dynamical systems III, volume 3 ofEncyclopaedia Math. Sci. Springer, Berlin, 1988.
[AM78] R. H. Abraham and J. E. Marsden. Foundations of Mechanics. Benjamin/CummingsPublishing Co., Reading, Mass., 1978.
[Arn64] V. I. Arnold. Instability of dynamical systems with several degrees of freedom. SovietMath. Dokl., 5:581–585, 1964.
[Arn89] V. I. Arnold. Mathematical methods of classical mechanics, volume 60 of GraduateTexts in Mathematics. Springer-Verlag, New York, second edition, 1989. Translatedfrom the Russian by K. Vogtmann and A. Weinstein.
[AS72] M. Abramowitz and I. Stegun. Handbook of Mathematical Functions. Dover, NewYork, 1972.
[BHJ+03] H. W. Broer, H. Hanßmann, A. Jorba, J. Villanueva, and F. O. O. Wagener. Normal-internal resonances in quasiperiodically forced oscillators: A conservative approach.Nonlinearity, 16:1751–1791, 2003.
[Bou97] J. Bourgain. On Melnikov’s persistency problem. Math. Res. Lett., 4(4):445–458,1997.
[CG91] A. Celletti and A. Giorgilli. On the stability of the Lagrangian points in the spatialRestricted Three Body Problem. Celest. Mech. Dynam. Astr., 50(1):31–58, 1991.
[CJ00] E. Castella and A. Jorba. On the vertical families of two-dimensional tori near thetriangular points of the bicircular problem. Celest. Mech. Dynam. Astr., 76(1):35–54,2000.
[DJK+05] M. Dellnitz, O. Junge, W. S. Koon, F. Lekien, M. W. Lo, J. E. Marsden, K. Padberg,R. Preis, S. D. Ross, and B. Thiere. Transport in dynamical astronomy and multibodyproblems. To appear in Int. J. Bifurcation & Chaos, 2004.
[DJ95] L. Dieci and J. Lorenz. Computation of invariant tori by the method of characteristics.SIAM J. Numer. Anal., 32(5):1436–1474, 1995.
[ELi88] L. H. Eliasson. Perturbations of stable invariant tori for Hamiltonian systems. Ann.Sc. Norm. Super. Pisa, Cl. Sci., 15(1):115–147, 1988.
[ERS00] K. D. Edoh, R. D. Russell, and W. Sun. Computation of invariant tori by orthogonalcollocation. Appl. Numer. Math., 32(3):273–289, 2000.
[Gab03] F. Gabern. On the dynamics of the Trojan asteroids. PhD thesis, Univ. Barcelona,2003. http://www.maia.ub.es/~gabern/.
[GDF+89] A. Giorgilli, A. Delshams, E. Fontich, L. Galgani, and C. Simo. Effective stabilityfor a Hamiltonian system near an elliptic equilibrium point, with an application tothe restricted three body problem. J. Diff. Eq., 77:167–198, 1989.
[GG78] A. Giorgilli and L. Galgani. Formal integrals for an autonomous Hamiltonian systemnear an equilibrium point. Celest. Mech. Dynam. Astr., 17:267–280, 1978.
[GJ01] F. Gabern and A. Jorba. A restricted four-body model for the dynamics near theLagrangian points of the Sun-Jupiter system. Discrete Contin. Dynam. Syst. - SeriesB, 1(2):143–182, 2001.
[GJ04] F. Gabern and A. Jorba. Generalizing the Restricted Three-Body Problem: TheBianular and Tricircular coherent problems. Astron. Astrophys., 420:751–762, 2004.
[GJMS01a] G. Gomez, A. Jorba, J. Masdemont, and C. Simo. Dynamics and mission designnear libration points. Vol. III, volume 4 of World Scientific Monograph Series inMathematics. World Scientific Publishing Co. Inc., River Edge, NJ, 2001. Advancedmethods for collinear points.
[GJMS01b] G. Gomez, A. Jorba, J. Masdemont, and C. Simo. Dynamics and mission designnear libration points. Vol. IV, volume 5 of World Scientific Monograph Series inMathematics. World Scientific Publishing Co. Inc., River Edge, NJ, 2001. Advancedmethods for triangular points.

Nonlinear Dynamics Around a 2-Dimensional Torus 181
[GKL+04] G. Gomez, W. S. Koon, M. W. Lo, J. E. Marsden, J. Masdemont, and S. D. Ross.Connecting orbits and invariant manifolds in the spatial three-body problem. Non-linearity, 17(5):1571–1606, 2004.
[GKMR04] F. Gabern, W. S. Koon, J. E. Marsden, and S. D. Ross. Theory and Computation ofNon-RRKM Lifetime Distributions and Rates in Chemical Systems with Three orMore Degrees of Freedom. Preprint, 2005.
[GKM05] F. Gabern, W. S. Koon, and J. N. E. Marsden. Parking a spacecraft near an asteroidpair. J. Guid. Control Dyn., 2005.
[GS97] A. Giorgilli and C. Skokos. On the stability of the Trojan asteroids. Astron. Astrophys.,317:254–261, 1997.
[JM99] A. Jorba and J. Masdemont. Dynamics in the centre manifold of the collinear pointsof the Restricted Three Body Problem. Physica D, 132:189–213, 1999.
[Jor99] A. Jorba. A methodology for the numerical computation of normal forms, centremanifolds and first integrals of Hamiltonian systems. Exp. Math., 8(2):155–195,1999.
[Jor00] A. Jorba. On practical stability regions for the motion of a small particle close to theequilateral points of the real Earth–Moon system. In Proceedings of the III Interna-tional Symposium HAMSYS-98. Geometrical Methods in Hamiltonian Systems andCelestial Mechanics. Patzcuaro (Mexico), December 7–11, 1998. World Scientific,2000.
[Jor01] A. Jorba. Numerical computation of the normal behaviour of invariant curves ofn-dimensional maps. Nonlinearity, 14(5):943–976, 2001.
[JS96] A. Jorba and C. Simo. On quasiperiodic perturbations of elliptic equilibrium points.SIAM J. Math. Anal., 27(6):1704–1737, 1996.
[JV97a] A. Jorba and J. Villanueva. On the normal behaviour of partially elliptic lowerdimensional tori of Hamiltonian systems. Nonlinearity, 10:783–822, 1997.
[JV97b] A. Jorba and J. Villanueva. On the persistence of lower dimensional invariant toriunder quasi-periodic perturbations. J. Nonlinear Sci., 7:427–473, 1997.
[JV98] A. Jorba and J. Villanueva. Numerical computation of normal forms around someperiodic orbits of the Restricted Three Body Problem. Physica D, 114:197–229, 1998.
[JV01] A. Jorba and J. Villanueva. The fine geometry of the Cantor families of invariant toriin Hamiltonian systems. In European Congress of Mathematics, Vol. II (Barcelona,2000), volume 202 of Progr. Math., pages 557–564. Birkhauser, Basel, 2001.
[KLMR00] W. S. Koon, M. W. Lo, J. E. Marsden, and S. D. Ross. Heteroclinic connectionsbetween periodic orbits and resonance transitions in celestial mechanics. Chaos,10(2):427–469, 2000.
[Mar80] C. Marchal. The quasi integrals. Celest. Mech. Dynam. Astr., 21:183–191, 1980.[MG95] A. Morbidelli and A. Giorgilli. Superexponential stability of KAM tori. J. Stat.
Phys., 78(5–6):1607–1617, 1995.[MH92] K. R. Meyer and G. R. Hall. Introduction to Hamiltonian Dynamical Systems and
the N-Body Problem. Springer, New York, 1992.[Nie04] L. Niederman. Exponential stability for small perturbations of steep integrable Hamil-
tonian syst. Ergod. Theory Dyn. Syst., 24(2):593–608, 2004.[PW94] A. D. Perry and S. Wiggins. KAM tori are very sticky: Rigorous lower bounds on
the time to move away from an invariant Lagrangian torus with linear flow. PhysicaD, 71:102–121, 1994.
[SD00] C. Skokos and A. Dokoumetzidis. Effective stability of the Trojan asteroids. Astron.Astrophys., 367:729–736, 2000.
[Sev97] M. B. Sevryuk. Excitation of elliptic normal modes of invariant tori in Hamiltoniansystems. In A. G. Khovanskii, A. N. Varchenko, and V. A. Vassiliev, editors, Topicsin Singularity Theory: V. I. Arnold’s 60th Anniversary Collection, volume 180 ofAmerican Mathematical Society Translations—Series 2, Advances in the Mathemat-ical Sciences, pages 209–218. American Mathematical Society, Providence, RhodeIsland, 1997.

182 F. Gabern and A. Jorba
[Sev98] M. B. Sevryuk. Invariant tori of intermediate dimensions in Hamiltonian systems.Regul. Chaotic Dyn., 3(1):39–48, 1998.
[SGJM95] C. Simo, G. Gomez, A. Jorba, and J. Masdemont. The bicircular model near thetriangular libration points of the RTBP. In A. E. Roy and B. A. Steves, editors, FromNewton to Chaos, pages 343–370, Plenum Press, New York, 1995.
[Sim89] C. Simo. Estabilitat de sistemes Hamiltonians. Mem. Real Acad. Cienc. ArtesBarcelona, 48(7):303–348, 1989.
[Sim98] C. Simo. Effective computations in celestial mechanics and astrodynamics. In V. V.Rumyantsev and A. V. Karapetyan, editors, Modern Methods of Analytical Mechan-ics and Their Applications, volume 387 of CISM Courses and Lectures. SpringerVerlag, New York, 1998.
[SOV05] F. Schilder, H. Osinga, and W. Vogt. Continuation of quasi-periodic invariant tori.To appear in SIAM J. Appl. Dynam. Syst., 2005.
[Sze67] V. Szebehely. Theory of Orbits. Academic Press, 1967.[UJP+02] T. Uzer, C. Jaffe, J. Palacian, P. Yanguas, and S. Wiggins. The geometry of reaction
dynamics. Nonlinearity, 15(4):957–992, 2002.[WBW04a] H. Waalkens, A. Burbanks, and S. Wiggins. Phase space conduits for reaction in
multi-dimensional systems: HCN isomerization in three dimensions. J. Chem. Phys.,121:6207–6225, 2004.
[WBW04b] H. Waalkens, A. D. Burbanks, and S. Wiggins. A computational procedure to detecta new type of high-dimensional chaotic saddle and its application to the 3D Hill’sproblem. J. Phys. A: Math. Gen., 37:L257–L265, 2004.
[Wig94] S. Wiggins. Normally hyperbolic invariant manifolds in dynamical systems, volume105 of Applied Mathematical Sciences. Springer-Verlag, New York, 1994. With theassistance of Gyorgy Haller and Igor Mezic.