EE250: Control Systems Solutions : Tutorial 6
4
EE250: Control Systems Solutions : Tutorial 6 24 February 2020 Q1. Sol. The open loop transfer function is given by G(s)H (s)= 1+4s s 2 (1 + s)(1 + 2s) c 1 : s = jω where ω :0 + to +∞ c 2 : s = Re jθ where R→∞ and θ : +90 o to 0 o to -90 o c 3 : s = -jω where ω : -∞ to 0 + c 4 : s = e jφ where → 0 and φ : -90 o to 0 o to 90 o Figure 1: Nyquist Contour Mapping of c 1 : G(jω)H (jω) = 1+4jω (jω) 2 (1 + jω)(1 + 2jω) |GH | = √ 1 + 16ω 2 ω 2 √ 1+ ω 2 √ 1+4ω 2 ∠GH = -π + tan -1 4ω - tan -1 ω - tan -1 2ω 1. when ω =0 = ⇒|GH | = ∞ and ∠GH = -π 2. when ω = ∞ = ⇒|GH | =0 and ∠GH = -π + π 2 - π 2 - π 2 = - 3π 2 3. when ω =0.01 = ⇒ ∠GH = -179.43 o Need to check real axis crossing point = ⇒-π + tan -1 4ω - tan -1 ω - tan -1 2ω = -π = ⇒ tan -1 4ω - tan -1 ω +2ω 1 - 2ω 2 =0 = ⇒ tan -1 4ω - 3ω 1-2ω 2 1+4ω 3ω 1-2ω 2 =0 = ⇒ tan -1 4ω - 8ω 3 - 3ω 1 - 2ω 2 + 12ω 2 =0 1
Transcript of EE250: Control Systems Solutions : Tutorial 6

EE250: Control SystemsSolutions : Tutorial 6
24 February 2020
Q1. Sol. The open loop transfer function is given by G(s)H(s) =1 + 4s
s2(1 + s)(1 + 2s)
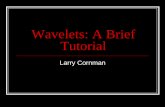
c1 : s = jω where ω : 0+ to +∞c2 : s = Rejθ where R→∞ and θ : +90o to 0o to −90oc3 : s = −jω where ω : −∞ to 0+
c4 : s = εejφ where ε→ 0 and φ : −90o to 0o to 90o
Figure 1: Nyquist Contour
Mapping of c1:
G(jω)H(jω) =1 + 4jω
(jω)2(1 + jω)(1 + 2jω)
|GH| =
√1 + 16ω2
ω2√1 + ω2
√1 + 4ω2
∠GH = −π + tan−14ω − tan−1ω − tan−12ω
1. when ω = 0 =⇒ |GH| =∞ and ∠GH = −π2. when ω =∞ =⇒ |GH| = 0 and ∠GH = −π + π
2− π
2− π
2= −3π
2
3. when ω = 0.01 =⇒ ∠GH = −179.43oNeed to check real axis crossing point
=⇒ −π+ tan−14ω− tan−1ω− tan−12ω = −π =⇒ tan−14ω− tan−1 ω + 2ω
1− 2ω2= 0
=⇒ tan−14ω − 3ω
1−2ω2
1 + 4ω 3ω1−2ω2
= 0 =⇒ tan−1 4ω − 8ω3 − 3ω
1− 2ω2 + 12ω2= 0
1

=⇒ ω − 8ω3 = 0 =⇒ ω(1− 8ω2) = 0 =⇒ ω = 0 or ω2 = 18=⇒ ω = 0
=⇒ ω = ±0.35rad/sec
For ω = 0.35
|GH| =√2.96
0.1225×√1.1225×
√1.50
= 10.67
∴ Mapping of c1 and c3 (mirror image) is as shown in Figure 2 below.
Figure 2: Nyquist Plot corresponding to c1 and c2
Mapping of c3 is ignored.
Mapping of c4:
G(εejφ)H(εejφ) =1 + 4εejφ
ε2e2jφ(1 + εejφ)(1 + 2εejφ)≈ 1
ε2e2jφ
since ε→ 0∴ radius→∞ and angle:−2φ; π to π
2to 0 to -π
2to −π.
Complete Nyquist plot is as shown below
Figure 3: Nyquist Plot
form Nyquist plot =⇒ N=2 and P=0
Z = N + P = 2 + 0 = 2
∴ Closed loop system is unstable with 2 R.H.S poles.
2

Q2. Sol Now, if a proportional gain K > 0 is added to the forward path, the sinusoidal magnitude ofthe system will be modified as
|GH| = K√1 + 16ω2
ω2√1 + ω2
√1 + 4ω2
The Nyquist plot will cross the negative real axis at −10.67K. If the critical point, i.e.,−1+j0 point lies in the left of this crossing point, the closed loop system will be stable sincethe Nyquist plot in that case does not encircle the critical point. Thus, the stable range of Kis
−10.67K > −1 or, K < 1/10.67⇒ K < 0.094
Let’s take K = 0.05. The gain at ω = 0.35 becomes 10.67× 0.05 = 0.5335. Thus, the gainmargin is 1/0.5335 = 1.87. In dB, it is 5.44 dB. For phase margin equate |GH| to 1. Findthe gain crossover frequency ωg. Calculate the phase angle (in degree) at ωg. Add 180o to getthe PM in degree. Complete this exercise.
Q3. Sol The open-loop transfer function is given by
G(s)H(s) = L(s) =K(1 + 0.5s)(s+ 1)
(1 + 10s)(s− 1)
We have to determine the range of values of K for which the system is stable.
Step 1. Draw the Nyquist contour asgiven in Figure 4.Find the magnitude and phase of L(jω)at ω = 0 and ω =∞.
Figure 4: Nyquist contour
L(jω) =K(1 + j0.5ω)(1 + jω)
(1 + j10ω)(jω − 1)
=K√1 + 0.25ω2
√1 + 100ω2
∠[tan−1(0.5ω) + tan−1(ω)− tan−1(10ω)− 180◦ + tan−1(w)
]3

At ω = +∞ |L| = K20
∠L = 90 + 90− 90− 180 + 90 = 0◦
At ω = 0 |L| = K20
∠L = −180◦
At ω = −∞ |L| = K20
∠L = −90− 90 + 90− 180− 90 = 0◦
Step 2. Find the point where L(jω) intersects the real axis. For this, equate the imaginarypart of L(jω) to zero.
Im[L(jω)] =(7.5ω − 19.5ω3)
1 + 101ω2 + 100ω4= 0
or, ω(7.5− 19.5ω2) = 0; this givesω = 0.62 and |L| = 0.167K
Also, you can equate the phase angle to π (as done in class) to get the same solution. Withthese 3 points, it is not possible to draw the nyquist plot. The sense of direction of L(s)-plotcan not be guessed. This is very crucial for applying Nyquist criterion to this problem. Hencewe need at least one more point. Lets compute the magnitude and phase of L(jω) at ω = 0.1rad/sec. This gives,
L(jω) = 0.708K∠150◦
The contour in s-plane is given in Figure 4.Since we are moving in clockwise direction alongthe contour in the s-plane, the correspondingL(s) − plot will have a direction from ω = 0+
towards ω = +∞ point i.e c1.The contour from ω = −∞ to ω = 0− would bea mirror image of the plot obtained for positivefrequencies. The complete Nyquist plot is shownin Figure 5.
Figure 5: Nyquist PlotConsider the following two cases:
• 0.167K > 1 or K > 5.988. In this case the critical point −1 + j0 would lie in theright hand side loop. Hence, the number of counter clockwise encirclement N = −1.Because the point is encircled in clockwise direction only once. Also, the number ofpoles of L(s) lying on right-half of s-plane P = 1. This gives
Z = N + P = −1 + 1 = 0
Hence, the system is stable when K > 6.
• 0.167K < 1 or K < 5.988. In this case, the critical point lies inside the left hand loop.The point −1 + j0 is encircled by the L(s)-plot in CCW direction once. This givesN = +1. Hence, the number roots lying on right-half s-plane is
Z = N + P = 1 + 1 = 2
Hence, the system is unstable when K < 6.
4