Dynamics of Particles 3. Kinetics of...
12
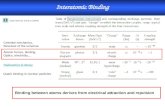
Dynamics of Particles 3. Kinetics of Particles References: Engineering Mechanics : Dynamics (J.L.Meriam, L.G.Kraige), 7 th Edition, pp.129, P.3.2 Type of Analysis : Kinetics of particles, Linear Motion Type of Element : Particle (one part) Comparison of results Object Value Theory RecurDyn Error θ = 15° t [sec] 5.59 5.593 0.003 x [m] 19.58 19.063 0.517 θ = 30° t [sec] - x [m] - Note 1. Theoretical Solution ∑ = − ∙ ∙ = 0 = ∙ ∙ N =∙ 0 = 7/
-
Upload
nguyenkhue -
Category
Documents
-
view
286 -
download
3
Transcript of Dynamics of Particles 3. Kinetics of...

Dynamics of Particles
3. Kinetics of Particles
References: Engineering Mechanics : Dynamics (J.L.Meriam, L.G.Kraige), 7th Edition, pp.129, P.3.2
Type of Analysis : Kinetics of particles, Linear Motion
Type of Element : Particle (one part)
Comparison of results
Object Value Theory RecurDyn Error
θ = 15° t [sec] 5.59 5.593 0.003
x [m] 19.58 19.063 0.517
θ = 30° t [sec] -
x [m] -
Note
1. Theoretical Solution
∑ 𝐹𝑦 = 𝑁 − 𝑚 ∙ 𝑔 ∙ 𝑐𝑜𝑠𝜃 = 0
𝑁 = 𝑚 ∙ 𝑔 ∙ 𝑐𝑜𝑠𝜃
N
𝑅 = 𝜇 ∙ 𝑁
𝜃
𝑚𝑔
𝑦
𝑥
𝑣0 = 7𝑚/𝑠

𝑅 = 𝜇 ∙ 𝑚 ∙ 𝑔 ∙ 𝑐𝑜𝑠𝜃
∑ 𝐹𝑥 = 𝑚 ∙ 𝑔 ∙ 𝑠𝑖𝑛𝜃 − 𝜇 ∙ 𝑚 ∙ 𝑔 ∙ 𝑐𝑜𝑠𝜃 = 𝑚 ∙ 𝑎
∴ 𝑎 = 𝑔 ∙ 𝑠𝑖𝑛𝜃 − 𝜇 ∙ 𝑔 ∙ 𝑐𝑜𝑠𝜃
(1) θ = 15°
𝑎15 = 9.81 ∙ (𝑠𝑖𝑛15 − 0.4 ∙ 𝑐𝑜𝑠15) = −1.251 𝑚/𝑠2
𝑣2 − 𝑣02 = 2𝑎𝑆
02 − 72 = −2 ∙ 1.251 ∙ 𝑆
S = 19.584m
𝑣 = 𝑣0 + 𝑎𝑡
𝑡 = −𝑣0/𝑎 = −7/(−1.251) = 5.596 𝑠𝑒𝑐
(2) θ = 30°
𝑎30 = 9.81 ∙ (𝑠𝑖𝑛30 − 0.4 ∙ 𝑐𝑜𝑠30) = 1.507 𝑚/𝑠2
Sliding occurs continuously because the acceleration is not “0” (plus value).

2. Numerical Solution – Using RecurDyn
1) Create New Model
- Set the model name : P3_2
- Set the “Unit” to “MKS”
- Set the “Gravity” to “-Y”
2) Create an Object Shape
(1) Create a box after clicking the “Ground”
Point1 : 0.0, 0.0, 0.0
Point2 : 6.0, 0.05, 0.0
Depth : 0.15
- Click the “Exit” icon to exit from the “Ground Edit” mode.

(2) Create a hexahedron shape, “Body1”
Point1 : 0.0, 0.05, 0.0
Point2 : 0.3, 0.2, 0.0
Depth : 0.15
(3) Create a maker on a point of “Body1”
(4) Modify of the properties of “Body1”
- Change the “Material Input Type” to “User Input” and enter “50” as the “Mass” value.

(5) Rotate “Box1” of the “Ground”
- Rotate “Box1” 15° to the right (clockwise) by using the “Basic Object Control” as shown
below.
(6) Rotate “Body1”
- Rotate “Body1” 15° to the right (clockwise) by using the “Basic Object Control” as shown
below.

(7) Create a marker, “Marker2”, on a point of “Body1”
- Modify the orientation of the marker, “Marker2”.
(8) Set an initial velocity of “Body1”
- Check the box of the X-axis value of “Marker2” and enter 7m/s as the value after clicking the
“Initial Velocity”.

3) Create “Joint”
(1) Translational Joint

(2) Set “Friction”
- Enter values related to friction which create friction forces of “TraJoint1”.
4) Create “Scope”
(1) Create a scope, “Scope1”, to display the displacement on the X axis of “Body1”
- Enter the “Name” and click the “Et” button after selecting the “Entity” icon. Drag and
drop the “Body1-Marker2” in the “Database” window.
-Change the “Component” to “Pos_TX”.
-Change the “Reference Frame” to “Ground-InertiaMarker”.

5) Analysis
- Execute the Dynamic/Kinematic icon to simulate (this example problem is a kinematic
problem because the number of degrees of freedom is “0”).
- Set the “End Time” and the “Step” as shown below.
- Set the “Maximum Time Step” to “0.001” and the “Integrator Type” to “DDASSL”.
6) Execute “Plot”
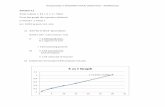
(1) The displacement on the X axis of “Body1” when the inclination of the slope is 15°.

- The “Body1” slides down the slope as 19.063m and then it stops when the time is 5.593sec.
(2) The displacement on the X axis of “Body1” when the inclination of the slope is 30°.
- “Body1” slides down the slope continuously.


3. Problems to Consider
1) The theoretical solution was equal to the numerical solution using simulation when the inclination
of the scope was θ = 30°, however, there is a slight error in the stopping distance when the
inclination was θ = 15°. What is the reason?
2) In this simulation, the properties of the translational joint were set to create friction forces. Create
a model using the axial force for the friction, which is the same as the force in the theory, to figure
out whether the simulation result is equal to the former result.