Dynamic Response Effect of Force Transducer during Wave Impact Model...
9
JURNAL TEKNOLOGI KELAUTAN Vol. 12, No. 1, Januari 2008: 61 - 69 Dynamic Response Effect of Force Transducer during Wave Impact Model Test Abdillah Suyuthi 1 1) Department of Marine Technology, Norwegian University of Science and Technology (NTNU) Trondheim, Norway, E-mail: [email protected] Abstract: This paper discusses the dynamic response problem of the force transducer, which is used during a wave-impact or slamming model-test. The mechanism of the transducer’s dynamic response is explained by considering a typical example. The objective of the study is to remove the dynamic effect and to determine the actual impact/slamming force. It can be done by performing a numerical simulation by modelling the transducer and the pressure panel as a mass- spring-damper SDOF-system. Then an alternative way of solving the equation of motion, i.e. the Newmark β method is applied in a Matlab environment. The corrected impact forces are then analyzed stochastically in order to predict the extreme slamming force corresponds to a 10 -2 annual exceedance-probability. The measured and corrected extremes are then compared. The conclusion is that the corrected (actual) force is significantly smaller than the original measured data. Keywords: dynamic response, force transducer, wave impact, model test, SDOF, Newmark β method 1. INTRODUCTION It has been well accepted that the wave-impact or slamming encountered by offshore structures and ships, especially during storms, is a random and non linear phenomenon. In the design, it is always a question what is the largest wave- impact or slamming could be encountered by a marine structure during a reference period of time. Generally, it depends on the certification bodies that determine the time reference, e.g. DNV, ABS, LR and others, but to answer the question is not an easy task. There are two types of methods that can be used in dealing with this type of nonlinear loads, i.e. time-domain simulation and model test. Due to the high cost when performing model test, usually not all sea states are run during the test. Using the environmental contour-line method, several sea states may be selected. A discussion of the contour-line method is presented in e.g. Suyuthi (2008), Haver (2007) and Haver (2002). For each sea state, several test programs are conducted and the wave-impact or slamming forces are recorded. Based on the measured slamming forces, the extreme values can be predicted by applying a long-term stochastic analysis. For this purpose, two approaches are available, i.e. all-maxima approach and m-hour maxima approach. More details about these approaches can be found in Suyuthi (2008). 2. MECHANISM OF THE DYNAMIC RESPONSE OF THE FORCE TRANSDUCER In a model test wave-impact loads or slamming pressures are measured by using force panels (small plates of typically 40 x 40 mm 2 ) which are attached to a force transducer. This system can be modeled as a mass-spring-damper system. When slamming occurs, the force transducer will shrink or grow as reaction to the pressure or suction force of the slamming. This mechanism affects the amount of electricity current passing the transducer. Prior to the model test, the transducer is calibrated and the relation between the force and the recorded voltage is established. From the recorded voltage we would like to determine the force on
Transcript of Dynamic Response Effect of Force Transducer during Wave Impact Model...

JURNAL TEKNOLOGI KELAUTAN Vol. 12, No. 1, Januari 2008: 61 - 69
Dynamic Response Effect of Force Transducer during Wave
Impact Model Test
Abdillah Suyuthi1 1) Department of Marine Technology, Norwegian University of Science and Technology (NTNU)
Trondheim, Norway, E-mail: [email protected]
Abstract: This paper discusses the dynamic response problem of the force transducer, which is used during a wave-impact or slamming model-test. The mechanism of the transducer’s dynamic response is explained by considering a typical example. The objective of the study is to remove the dynamic effect and to determine the actual impact/slamming force. It can be done by performing a numerical simulation by modelling the transducer and the pressure panel as a mass-spring-damper SDOF-system. Then an alternative way of solving the equation of motion, i.e. the Newmark β method is applied in a Matlab environment. The corrected impact forces are then analyzed stochastically in order to predict the extreme slamming force corresponds to a 10-2 annual exceedance-probability. The measured and corrected extremes are then compared. The conclusion is that the corrected (actual) force is significantly smaller than the original measured data. Keywords: dynamic response, force transducer, wave impact, model test, SDOF, Newmark β
method
1. INTRODUCTION It has been well accepted that the wave-impact or slamming encountered by offshore structures and ships, especially during storms, is a random and non linear phenomenon. In the design, it is always a question what is the largest wave-impact or slamming could be encountered by a marine structure during a reference period of time. Generally, it depends on the certification bodies that determine the time reference, e.g. DNV, ABS, LR and others, but to answer the question is not an easy task. There are two types of methods that can be used in dealing with this type of nonlinear loads, i.e. time-domain simulation and model test. Due to the high cost when performing model test, usually not all sea states are run during the test. Using the environmental contour-line method, several sea states may be selected. A discussion of the contour-line method is presented in e.g. Suyuthi (2008), Haver (2007) and Haver (2002). For each sea state, several test programs are conducted and the wave-impact or slamming forces are recorded. Based on the
measured slamming forces, the extreme values can be predicted by applying a long-term stochastic analysis. For this purpose, two approaches are available, i.e. all-maxima approach and m-hour maxima approach. More details about these approaches can be found in Suyuthi (2008). 2. MECHANISM OF THE DYNAMIC
RESPONSE OF THE FORCE TRANSDUCER
In a model test wave-impact loads or slamming pressures are measured by using force panels (small plates of typically 40 x 40 mm2) which are attached to a force transducer. This system can be modeled as a mass-spring-damper system. When slamming occurs, the force transducer will shrink or grow as reaction to the pressure or suction force of the slamming. This mechanism affects the amount of electricity current passing the transducer. Prior to the model test, the transducer is calibrated and the relation between the force and the recorded voltage is established. From the recorded voltage we would like to determine the force on

Jurnal Teknologi Kelautan Vol. 12, No. 1, Januari 2008: 61-69
62
the transducer. The acquisition-data system records the slamming force based on the above process in the real time and saves the time-series data in a digital file. It is worth to note that the calibration of the force transducer is done in a dry condition. The force that is applied in the calibration is a static weight while in the model test, the force transducer and the force panel may be modeled as a mass-spring-damper system. The mass of the system includes the added mass (which varies with time as also the damping). Therefore, the force recorded by the data-acquisition system will not be the same as the actual wave-impact force (Bunnik and Roelofs, 2004) and Fokk, 2007). This can be demonstrated as follows. We consider a time series of a slamming event, that is, the slamming record slam5230-05-01, which is the largest slamming event from the Gjøa semi-submersible slamming test program corresponding to a 10-2 worst sea state. Fig.1 shows the pressure time-series of this event. Because here we are dealing with a mechanical mass spring-damper system, it is more convenient to work with force rather than with pressure. Hence, the slamming-pressure history is converted to a slamming force by multiplying the pressure with the panel area (10.89 m2; see Fig.2).
The equation of motion of the mechanical mass-spring-damper system is represented as
( )tFKxxCxM =++ (1)
where M is the mass of the force transducer, force panel and the added mass, C is the damping estimated as a damping ratio
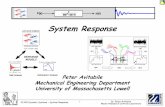
( )02 ωξ mCCC cr == such that 02 ωξ mC ⋅= , K is the spring stiffness or a restoring coefficient, which is known from the calibration and ( )tF is the input force or the actual impact load working on the force panel. The natural frequency of the system is estimated by taking the spectrum for several blocks of the series (see Figs 2 and 3). It is seen that over the blocks where there is no wave action (indicated by zero slamming force), the resonance frequency is read about 85Hz (see block 1, 7, 9 and 10). Block 2, 6, and 8 are seen to be ‘free’ from wave action but the resonance frequency is far lower than it should be. However, the second spectrum peak over these blocks is at around 85Hz. It could be splashing or other mechanism occurring during these block period. For the other blocks (3, 4 and 5), it is clearly seen that the wave impact occurs at these block periods, which gives much energy at low frequencies.
0 2 4 6 8 10-20
0
20
40
60
80
100
120
140Original Series: slam5230-05-01
Time (s)
Sla
mm
ing
Pre
ssu
re (
kPa)
Figure 1. Measured slamming pressure

Dynamic Response Effect… (Suyuthi)
63
0 2 4 6 8 10-200
0
200
400
600
800
1000
1200
1400
1600
Time (s)
Sla
mm
ing
Fo
rce
(kN
)
Block 1
f0=84.56Hz
Block 2
f0=1.32Hz
Block 3
f0=0.66Hz
Block 4
f0=0.66Hz
Block 5
f0=0.66Hz
Block 6
f0=0.66Hz
Block 7
f0=87.16Hz
Block 8
f0=0.66Hz
Block 9
f0=85.88Hz
Block 10
f0=84.56Hz
Figure 2. Slamming force corresponding to the measured pressure shown in Fig. 1
Figure 3. Spectra of the different blocks

Jurnal Teknologi Kelautan Vol. 12, No. 1, Januari 2008: 61-69
64
0 2 4 6 8 10-1000
-500
0
500
1000
1500
2000
Time (s)
Sla
mm
ing
Fo
rce
(kN
)
Simulated ResponseInput Load
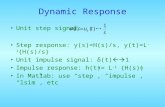
Figure 4. Simulated slamming force and input load
Figure 5. An example of original and simulated series
According to Lehn (2003), the natural frequency of the force transducer should be higher than 67 Hz. It means that the estimated natural frequency of about 85 Hz is in accordance with Lehn (2003). Evaluating the equation of motion, Eq. (1), and comparing with the data acquisition process described earlier, we know that what actually detected is the strain of the sensor and then recorded as the Kx term or the restoring force.
However, we are interested in the force ( )tF as the actual impact load working on the force panel. If we considered the recorded force as the actual slamming force, in other words we set the recorded force as ( )tF and then perform a numerical simulation, we may expect that the simulated force will not be identical to the force recorded (see Fig. 4). Therefore, we need to adjust the input load such that the response, is identical to the response having been recorded. This adjusted input load is the actual slamming

Dynamic Response Effect… (Suyuthi)
65
force, which we are looking for. By performing this analysis, we have corrected the measured response force for the dynamic amplification effects (see Fig. 5). In this case the dynamic amplification factor is 1.05. This means that the recorded force is 5% larger than the actual slamming force. The corrected values can be used as input in the stochastic analysis. The corrected input-load is adjusted manually by describing the load history (force magnitude vs. time). After the adjustment, we run the numerical simulation, giving a new response in accordance to the input load history. One judges whether the response is similar enough with the recorded wave impact signal. More and more input load-history adjustment and simulations must be performed in order to get the same response as what have been recorded (impact signal). A good knowledge or experience regarding the dynamic response behavior is required in order to do this task efficiently. Otherwise, trial and error can be done many times without any sign of similarity between the simulated response and the recorded signal. Therefore, it takes a long time, even by means of a GUI (graphical user interface) software. Therefore, it is necessary to have a tool which is able to do the process automatically. Hence, an applied research for developing this tool is a part of further works. The numerical simulation for this purpose is performed by applying the Newmark-β method. The method is presented in the following section. MARINTEK has a numerical tool for performing this analysis, which is called N-Trix (Lehn, 2003) and has been used for more than 20 years, including the analysis of Gjøa slamming-test results. The newer version of the MARINTEK’s numerical tool, which is developed based on a similar algorithm, is called YuthPact (Suyuthi, 2007). It is a graphical user interface software which is developed on top of a Matlab platform. It is a new program and the development is in progress. Only a trial version is currently available. The dynamic response analysis of the force transducer performed in this study refers to both tools (algorithm).
3. NUMERICAL SOLUTION The numerical solution used for this purpose was the “constant average acceleration” method. The method is a special case of the ewmark’s β-method with parameters
21=γ and 41=β . It is an unconditionally stable type of numerical integration. This means that no specific requirement for time step length in order to get the integration goes properly. The time step length is only determined from the requirement for accuracy. A brief review of the method is presented below. For more detail about the method, the readers can consult Wilson (2002) and Garcia and Bayo (1994). Newmark (1959) as cited by Garcia and Bayo (1994) proposed an algorithm for the solution of problems in structural dynamics. His method relies on the following interpolations that relate positions, velocities, and accelerations from step n to 1+n .
( )[ ] 11 1 ++ +−Δ+= nnnn aatvv γγ (2)
nnn vtxx Δ+=+1 ( )[ ]1
2
2212 ++−Δ+ nn aat ββ (3)
where nx , nv and na are approximations to the
position, velocity, and acceleration vectors at time step n ; and β and γ are the parameters that define the method. As mentioned before, we set the parameters in Eqs (2) and (3), such that 21=γ and 41=β . In doing this, we have a stable Newmark’s β-method, which is well-known as “constant average acceleration”, since the method assumes that the acceleration is constant over the time
interval, [ ]1, +nn tt , and equal to ( )12
1++ nn aa .
Introducing 21=γ and 41=β to Eqs (2) and (3), we get as follows.
11 2
1
2
1++ Δ+Δ+= nnnn atatvv (4)
122
1 4
1
4
1++ Δ+Δ+Δ+= nnnnn atatvtxx (5)
Eqs (4) and (5) can be solved with 1+nx as primary unknowns. Then we could

Jurnal Teknologi Kelautan Vol. 12, No. 1, Januari 2008: 61-69
66
substitute 1+na and 1+nv in terms of nx , nv
and 1+nx and re-write Eq.(4) and (5) as follows.
( ) nnnnn avt
xxt
a −Δ
−−Δ
= ++
44121 (6)
( ) nnnn vxxt
v −−Δ
= ++ 11
2 (7)
Now, we need to solve 1+nx . It can be done by substituting Eqs (6) and (7) to the equation of motion, Eq. (1) (see also Eqs (8) and (9)). Once
1+nx is known, then 1+na and 1+nv are also known.
( )tFKxCvMa nnn =++ +++ 111 (8)
( )tFxKCt
Mt n =
+
Δ+
Δ +12
24
+
Δ+
Δ+ nnn av
tx
tM
442
+
Δ+ nn vx
tC
2
(9)
4. THE LARGEST SLAMMING EVALUATION: 10-2 WORST SEA STATE FOR GJØA CASE
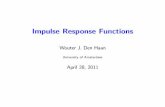
Suyuthi (2008) has analyzed the Gjøa model test data and concluded that, the 10-2 worst sea state for Gjøa case is Hs=12.00 m; Tp=12.00 s. For the particular sea state, there are 14 test programs, i.e.: 5230, 5240, 5400, 5410, 5420, 5431, 5820, 5830, 5840, 5850, 5860, 5870, 5880, and 5890. The largest slamming event for each test-run was taken and analyzed in order to correct the effect of the transducer’s dynamic amplification by applying the above procedure. The result are summarized in Table 1. In order to estimate the characteristic slamming pressures, we use corrected data on Table 1. First, we need to plot the data in the Gumbel and Frechet probability paper (see Fig. 6). As we can see at the figure, there are 14 points representing the largest slamming event for each test run for corresponding sea state. It seems that the data follows Frechet plotting better than Gumbel plotting. Therefore, let us decide to accept this and fit the data into Frechet distribution (see Fig. 7). It seems that the ‘true’ estimated parameter is smaller than 2. Therefore, the method of moment cannot be used to estimate the distribution parameters. In the figure, only least square fitting is presented. Thus, the high percentile values then can be easily determined and summarized in Table 2
Table 1. Corrected slamming pressures for the Gjøa 10-2 worst sea state
Test Measured Corrected Reduction
DAF kPa kN kPa kN kPa kN
5820 115.60 1258.88 105.60 1150.00 10.00 108.88 1.094
5230 128.60 1400.45 122.50 1334.03 6.10 66.42 1.050
5840 148.70 1619.34 119.38 1300.00 29.32 319.34 1.246
5860 181.80 1979.80 174.47 1900.00 7.33 79.80 1.042
5420 210.80 2295.61 179.06 1950.00 31.74 345.61 1.177
5850 212.80 2317.39 156.11 1700.00 56.69 617.39 1.363
5870 233.00 2537.37 202.02 2200.00 30.98 337.37 1.153
5410 241.20 2626.67 215.79 2350.00 25.41 276.67 1.118
5400 306.90 3342.14 280.07 3050.00 26.83 292.14 1.096
5830 360.70 3928.02 270.89 2950.00 89.81 978.02 1.332
5890 568.70 6193.14 449.95 4900.00 118.75 1293.14 1.264
5240 578.10 6295.51 493.11 5370.00 84.99 925.51 1.172
5880 745.40 8117.41 716.25 7800.00 29.15 317.41 1.041
5431 1055.50 11494.40 964.19 10500.00 91.31 994.40 1.095

Dynamic Response Effect … (Suyuthi)
67
Figure 6. Cumulative probability of slamming-pressure data plotted in Gumbel and Frechet probability paper
Figure 7. Frechet fitted distribution and its high percentile values estimation

Jurnal Teknologi Kelautan Vol. 12, No. 1, Januari 2008: 61-69
68
Figure 8. Comparison between measured and corrected slamming-pressure fitted-distributions
Measured and corrected slams empirical data and its distribution models are plotted together in Fig. 8. Both models are drawn as two parallel lines in Frechet probability paper. Although we cannot avoid uncertainty of the extreme values, it is good to have a corrected slamming distribution such that put aside one source of the systematic error.
Table 2. Comparison of characteristic slamming pressures, measured vs. corrected slams.
FX Measured Char.Slams
Corrected Char.Slams
Reduction(%)
0.50 264 228 13.6% 0.90 904 788 12.8% 0.95 1449 1267 12.6% 6. CONCLUSION The mechanism of the effect of transducer’s dynamic response has been discussed. A numerical simulation assuming transducer and pressure panel as mass-spring-damper SDOF system has been presented. The method and numerical tool has been shown to be a good solution for this problem. The comparison between measured and corrected values shows that the corrected values have significant reduced values as compared to the originals as well as the extremes.
ACKNOWLEDGMENTS This author would like to express his gratitude to Professor Sverre K. Haver from StatoilHydro who made semi-submersible model test data to be available. The author also would like to thank to Mr. Erik Lehn from MARINTEK a/s who has given enlightment regarding the N-Trix algorithm. REFERENCES Bunnik, T., & Roelofs, H. (2004), SNORRE
TLP, Model Tests in 100-year, 10000-year and Fatigue Environments. Maritime Research Institute, Netherlands. Netherlands: MARIN.
Fokk, T. (2007), Gjøa Development Project-Model Tests, Model Test Report, Trondheim, MARINTEK.
Garcia, de J.J. & Bayo, E. (1994), Kinematic and Dynamic Simulation of Multibody Systems, The Real-Time Challenge, New York, Springer-Verlag.
Haver, S. (2002), Consistent prediction of 100-year response values, Stavanger, Stat-oilHydro.
Haver, S.K. (2007), Prediction of Charac-teristics Response for Design Purposes. Stavanger, StatoilHydro.

Dynamic Response Effect… (Suyuthi)
69
Lehn, E. (2003), On Water Impact Loads, Trondheim, MARINTEK.
Newmark, N.M., (1959), “A Method of Compu-tation for Structural Dynamics,” ASCE Journal of the Engineering Mechanics.
Suyuthi, A. (2007), YuthPact Version 1.4: GUI Application for Estimating the Wave Impact Loads based on Model Test
Result, MARINTEK A/S, Offshore Hy-drodynamic, Trondheim.
Suyuthi, A. (2008), Prediction of Extreme Loads due to Wave Breaking Against Platform Column, Master Thesis, NTNU, Trondheim.
Wilson, E.L. (2002). Three-Dimensional Static and Dynamic Analysis of Structures, California, Computer and Structures, Inc.