Dynamic Systems System Response 031906 -...
50
1 Dr. Peter Avitabile Modal Analysis & Controls Laboratory 22.451 Dynamic Systems – System Response System Response Peter Avitabile Mechanical Engineering Department University of Massachusetts Lowell TRANSFER FUNCTION ) S ( F ) S ( H ) S ( Y • = LAPLACE DOMAIN IMPULSE ) t ( f ) t ( h ) t ( y ⊗ = ∫ τ τ − τ = t 0 d ) t ( f ) ( h ) t ( y TIME DOMAIN FRF ) j ( F ) j ( H ) j ( Y ω • ω = ω FREQUENCY DOMAIN RESPONSE MODELS
Transcript of Dynamic Systems System Response 031906 -...

1 Dr. Peter AvitabileModal Analysis & Controls Laboratory22.451 Dynamic Systems – System Response
System Response
Peter AvitabileMechanical Engineering DepartmentUniversity of Massachusetts Lowell
TRANSFER FUNCTION
)S(F)S(H)S(Y •=
LAPLACE DOMAIN
IMPULSE
)t(f)t(h)t(y ⊗=
∫ ττ−τ=t
0d)t(f)(h)t(y
TIME DOMAIN
FRF
)j(F)j(H)j(Y ω•ω=ω
FREQUENCY DOMAIN
RESPONSEMODELS

2 Dr. Peter AvitabileModal Analysis & Controls Laboratory22.451 Dynamic Systems – System Response
Transient Response – First-order System
oy)0(y.C.I0)t(fyy =>τ=+τ&
Free Response No forcing function – Only I.C.Laplace Transform
[ ] 0)s(Yy)s(sY o =+−ττ+
=+τ
τ=⇒ 1
oo
sy
1sy)s(Y
Inverse Laplace( )τ−
=t
oey)t(ystart at and exponentially decay to zero as t ∞
oy
Source: Dynamic Systems – Vu & Esfandiari

3 Dr. Peter AvitabileModal Analysis & Controls Laboratory22.451 Dynamic Systems – System Response
Transient Response – First-order System
0otherwise0tifA)t(f =>=Forced Response – Step Response
[ ]sA)s(Yy)s(sY o =+−τ
( )1ssAsy)s(Y o
+τ+τ
=⇒
Laplace Transform
τ+
+=
τ+
τ+
= 1s
csc
1ss
Asy)s(Y 21
o
break up using partial fraction expansion

4 Dr. Peter AvitabileModal Analysis & Controls Laboratory22.451 Dynamic Systems – System Response
Transient Response – First-order System
A1sAsy)s(sYc 0s
o0s1 =
+τ+τ
== ==
where
( )
τ+
−+=∴ 1s
1AysA)s(Y o
Ays
Asy)s(Y1sc o1s
o1s2 −=τ
+=
τ+=
τ−=τ−=

5 Dr. Peter AvitabileModal Analysis & Controls Laboratory22.451 Dynamic Systems – System Response
Transient Response – First-order System
τ−−+=
toSTEP e)Ay(A)t(y
Inverse Laplace
−=→= τ− t
STEPo e1A)t(y0yif
A632.0)(y =τA865.0)2(y =τA950.0)3(y =τA982.0)4(y =τA995.0)5(y =τ
Scan Fig. 7.2 p. 337
Source: Dynamic Systems – Vu & Esfandiari

6 Dr. Peter AvitabileModal Analysis & Controls Laboratory22.451 Dynamic Systems – System Response
Transient Response – First-order SystemForced Response – Ramp Response
0otherwise0tifAt)t(f =>=Laplace Transform
[ ] 2o sA)s(Yy)s(sY =+−τ
τ+
++=
τ+
+τ= 1s
Cs
BsB
1ss
syA
)s(Y 122
2
2o
where AyC;AB;AB o12 τ+=τ−==

7 Dr. Peter AvitabileModal Analysis & Controls Laboratory22.451 Dynamic Systems – System Response
Transient Response – First-order SystemInverse Laplace
Note that the SS response is . After the transient portion decays, the response will track the ramp but with an error of .
τ− AAt
τ−τ+τ−=
tRAMP eAAAt)t(y
τA
Source: Dynamic Systems – Vu & Esfandiari

8 Dr. Peter AvitabileModal Analysis & Controls Laboratory22.451 Dynamic Systems – System Response
Transient Response – Second-order System
Free Response – No forcing function – Only I.C.
oo2
nn x;x.C.I)t(fxx2x &&&& =ω+ζω+
Laplace Transform
[ ] [ ] 0)s(X)0(x)s(sX2)0(x)0(sx)s(Xs 2nn
2 =ω+−ζω+−− &
( )2
nn2
00n
ωs2ζsxx2ζsX(s)
++−+
=•
ωω
0s2s 2nn
2 =ω+ζω+Solution form depends on the poles of the characteristic equation
( ) 2n
2nn2,1s ω−ζω±ζω−=∴
12nn −ζω±ζω−=

9 Dr. Peter AvitabileModal Analysis & Controls Laboratory22.451 Dynamic Systems – System Response
Transient Response – Second-order SystemThree cases of damping•Case 1 – Overdamped (ζ>1)•Case 2 – Critically damped (ζ=1)•Case 3 – Underdamped (0<ζ<1)•Case 4 – Undamped (ζ=0)
Scan Fig. 7.5 p. 343
Source: Dynamic Systems – Vu & Esfandiari

10 Dr. Peter AvitabileModal Analysis & Controls Laboratory22.451 Dynamic Systems – System Response
Transient Response – Second-order SystemCase 1 – Overdamped (ζ>1) – Two Real Roots
( ) ( )( )( )21
00n2
nn2
00nssss
vx2ss2s
vx2s)s(X−−+ζω+
=ω+ζω+
+ζω+=
Partial Fraction Expansion
;1s 2nn1 −ζω+ζω−= 1s 2
nn2 −ζω−ζω−=
2
2
1
1ss
Ass
A)s(X−
+−
=12
vx1A
2n
002
n1
−ζω
+
−ζ+ζω
=
12
vx1A
2n
002
n2
−ζω
+
−ζ−ζω−
=

11 Dr. Peter AvitabileModal Analysis & Controls Laboratory22.451 Dynamic Systems – System Response
Transient Response – Second-order SystemCase 1 – Overdamped (ζ>1) – Two Real Roots
( )t12
n
002
n 2ne
12
vx1)t(x −ζ−ζω−
−ζω
+
−ζ+ζω
=
( )t12
n
002
n 2ne
12
vx1−ζ+ζω−
−ζω
+
−ζ−ζω
−

12 Dr. Peter AvitabileModal Analysis & Controls Laboratory22.451 Dynamic Systems – System Response
Transient Response – Second-order SystemCase 2 – Critically damped (ζ=1) – Two Real Repeated Roots
( ) t00n
t0
nn tevxex)t(x ω−ω− +ω+=
roots) repeated real two(s n2,1 ω−=
( ) ( )( )2n
00n0n2
nn2
00n
svxxs
s2svx2s)s(X
ω+
+ω+ω+=
ω+ω+
+ω+=
( )2n
00n
n
0
svx
sx)s(X
ω+
+ω+
ω+=
Inverse Laplace

13 Dr. Peter AvitabileModal Analysis & Controls Laboratory22.451 Dynamic Systems – System Response
Transient Response – Second-order SystemCase 3 – Underdamped (0<ζ<1) – Complex Conjugate Pair
( ) 2n
2n
22n
2nn
2 ss2s ω+ωζ−ζω+=ω+ζω+
Define: nζω=σ2
nd 1 ζ−ω=ω
( ) ( )( ) 2
d2
0002
nn2
00n
svxx2s
s2svx2s)s(X
ω+σ+
++σ+=
ω+ζω+
+ζω+=
Then
( ) 2d
2s ω+σ+=
Then

14 Dr. Peter AvitabileModal Analysis & Controls Laboratory22.451 Dynamic Systems – System Response
Transient Response – Second-order Systemwhich can be rearranged into
( )( ) ( ) 2
d2
002
d2
0
svx
sxs)s(X
ω+σ+
+σ+
ω+σ+
σ+=
Inverse Laplace
( )( )
( )( ) 2
d2d
d
002
d2
0
svx
sxs
ω+σ+
ωω+σ
+ω+σ+
σ+=
tsinevxtcosex)t(x dt
d
00d
t0 ω
ω+σ
+ω= σ−σ−
OR
ω
ω+σ
+ω= σ− tsinvxtcosxe dd
00d0
t

15 Dr. Peter AvitabileModal Analysis & Controls Laboratory22.451 Dynamic Systems – System Response
Forced Response – Unit Impulse
with I.C.
Grouping terms
oo x;x &)t()t(fxx2x 2nn δ==ω+ζω+ &&&
Laplace Transform
[ ] [ ] )s(F)s(X)0(x)s(sX2)0(x)0(sx)s(Xs 2nn
2 =ω+−ζω+−− &
( )2
nn2
oon2
nn2 s2s
vx2ss2s)s(F)s(X
ω+ζω+
+ζω++
ω+ζω+=
If I.C. are zero, then the result is the system transfer function
2nn
2 s2s1
)s(F)s(X)s(H
ω+ζω+==
The inverse Laplace of this yields the impulse response of the system. (Note that I.C. are zero)

16 Dr. Peter AvitabileModal Analysis & Controls Laboratory22.451 Dynamic Systems – System Response
Forced Response – Unit ImpulseCase 1 – Overdamped
( ) ( )t12
n
t12
n
2n
2n e
12
1e12
1)t(x −ζ+ζω−−ζ−ζω−
−ζω−
−ζω=
( )t12
n
002
n 2ne
12
vx1−ζ−ζω−
−ζω
+
−ζ+ζω
+
( )t12
n
002
n 2ne
12
vx1−ζ+ζω−
−ζω
+
−ζ−ζω
−
I.C.

17 Dr. Peter AvitabileModal Analysis & Controls Laboratory22.451 Dynamic Systems – System Response
Forced Response – Unit Impulse
Case 2 – Critically Damped
( ) toon
to
t nnn tevxexte)t(x ω−ω−ω− +ω++=
I.C.

18 Dr. Peter AvitabileModal Analysis & Controls Laboratory22.451 Dynamic Systems – System Response
Forced Response – Unit Impulse
Case 4 – Undamped
Case 3 – Underdamped
( )
ω
ω+σ
+ω+ωω
= σ−σ− tsinvxtcosxetsine1)t(x dd
oodo
td
t
d
I.C.
tsinvtcosxtsin1)t(x nn
onon
nω
ω+ω+ω
ω=

19 Dr. Peter AvitabileModal Analysis & Controls Laboratory22.451 Dynamic Systems – System Response
Forced Response – Unit Impulse
Source: Dynamic Systems – Vu & Esfandiari

20 Dr. Peter AvitabileModal Analysis & Controls Laboratory22.451 Dynamic Systems – System Response
Forced Response – Unit Impulse
Source: Dynamic Systems – Vu & Esfandiari

21 Dr. Peter AvitabileModal Analysis & Controls Laboratory22.451 Dynamic Systems – System Response
Forced Response – Unit Step
with I.C. oo x;x &)t(u)t(fxx2x 2nn ==ω+ζω+ &&&
Source: Dynamic Systems – Vu & Esfandiari

22 Dr. Peter AvitabileModal Analysis & Controls Laboratory22.451 Dynamic Systems – System Response
Forced Response – Unit Step
Source: Dynamic Systems – Vu & Esfandiari

23 Dr. Peter AvitabileModal Analysis & Controls Laboratory22.451 Dynamic Systems – System Response
Forced Response – Unit Step
Source: Dynamic Systems – Vu & Esfandiari

24 Dr. Peter AvitabileModal Analysis & Controls Laboratory22.451 Dynamic Systems – System Response
Forced Response – Unit Step
Source: Dynamic Systems – Vu & Esfandiari

25 Dr. Peter AvitabileModal Analysis & Controls Laboratory22.451 Dynamic Systems – System Response
Frequency Response Function
For a 1st order system
The FRF can be obtained from the Fourier Transform of Input-Output Time Response (and is commonly done so in practice)The FRF can also be obtained from the evaluation of the system transfer function at s=jω.
ωτ+=ω=⇒
+τ= ω= j1
1)j(H)s(H1s
1)s(H js
For a 2nd order system
2nn
2 s2s1)s(H
ω+ζω+=
2nn
2jsj2
1)j(H)s(Hω+ωζω+ω−
=ω=⇒ ω=

26 Dr. Peter AvitabileModal Analysis & Controls Laboratory22.451 Dynamic Systems – System Response
Frequency Response FunctionThe FRF for a mechanical system
kjcm1)j(H
kcsms1)s(H 22 +ω+ω−
=ω⇒++
=
This is normally presented in a LOG-MAG and PHASE plot called a BODE DIAGRAM.

27 Dr. Peter AvitabileModal Analysis & Controls Laboratory22.451 Dynamic Systems – System Response
FRF – Bode Diagram – 1st Order
Source: Dynamic Systems – Vu & Esfandiari

28 Dr. Peter AvitabileModal Analysis & Controls Laboratory22.451 Dynamic Systems – System Response
FRF – Bode Diagram – 2nd Order
Source: Dynamic Systems – Vu & Esfandiari

29 Dr. Peter AvitabileModal Analysis & Controls Laboratory22.451 Dynamic Systems – System Response
Fourier Series
A periodic function is a function that satisfies the relationship
where is the period of the function( ) ( )Ttftf +=
T
The fundamental angular frequency is defined by
(rad/sec) T2
oπ
=ω

30 Dr. Peter AvitabileModal Analysis & Controls Laboratory22.451 Dynamic Systems – System Response
Fourier Series
Consider a family of waveforms
( )( ) ( )
( ) ( )
( ) ( )
( ) ( )t14sin71tf
t10sin51tf
t6sin31tf
t2sintf1tf
4
4
3
2
1
π=
π=
π=
π==
Summed as
( ) ( ) 5N1 tftgN
1nn ≤<= ∑
=

31 Dr. Peter AvitabileModal Analysis & Controls Laboratory22.451 Dynamic Systems – System Response
Fourier Series
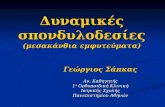
The summed waveforms can be plotted in Matlab to approximate a square wave

32 Dr. Peter AvitabileModal Analysis & Controls Laboratory22.451 Dynamic Systems – System Response
Fourier Series
A Fourier Series representation of a real periodic function is based upon the summation of harmonically related sinusoidal components.
Note: These two are equivalent – one is written with sine and cosine terms – the other is written as a sin with amplitude and phase
If the period is , then the harmonics are sinusoids with frequencies that are integer multiples of ; This is writtenas
( )tf
Toω
( )non tnsinA φ+ω=
( ) ( ) ( )tnsinbtncosatf ononn ω+ω=

33 Dr. Peter AvitabileModal Analysis & Controls Laboratory22.451 Dynamic Systems – System Response
Fourier Series
The Fourier Series representation of an arbitrary periodic waveform is an infinite sum of harmonically related sinusoids and is commonly written as
( )tf
( )[ ]∑∞
=φ+ω+=
1nnono tnsinAa
21
( ) ( ) ( )[ ]∑∞
=ω+ω+=
1nonon0 tnsinbtncosaa
21tf
Or( ) ( ) ( )tjntjnntjntjnn oooo ee
j2bee
2atf ω−ωω−ω +++=
( ) ( ) tjnnn
tjnnn
oo ejba21ejba
21 ωω −++−=
[ ]∑∞
∞−
ω= tjnn
oeF

34 Dr. Peter AvitabileModal Analysis & Controls Laboratory22.451 Dynamic Systems – System Response
Fourier Coefficients
The derivation of the expression for computing the coefficients in a Fourier Series is beyond the scope of this course. Without proof, the coefficients are
( ) ( )∫+
ω=Tt
ton
1
1
dttnsintfT1b
( )∫+
ω−=Tt
t
tjnn
1
1
o dtetfT1F
which is evaluated over any periodic segment or in sinusoidal form
nF
( ) ( )∫+
ω=Tt
ton
1
1
dttncostfT1a

35 Dr. Peter AvitabileModal Analysis & Controls Laboratory22.451 Dynamic Systems – System Response
Response of Linear System Due to Periodic Inputs
Consider a linear SDOF system with a steady state periodic input (assume that the initial conditions and transients have decayed to zero)
( )∑∞
=φ+ω+=
1nnono tnsinAa
21
( ) ∑∞
∞−
ω= tjnn
oeFtf
The input excitation can be described by a Fourier Series representation as

36 Dr. Peter AvitabileModal Analysis & Controls Laboratory22.451 Dynamic Systems – System Response
Response of Linear System Due to Periodic Inputs
The system output response is related to the input excitation through the system frequency response function as
( ) ( )φ+ω= tnsinAtf onn( )tynGenerates an output sinusoidal component with a
magnitude and phase determined by the nth component of
( ) ( ) ( )ω⋅ω=ω jFjHjY
The nth real harmonic input component of the Fourier Series
( )ωjH
( ) ( ) ( )[ ]ononon jnHnsinAjnHty ω∠+φ+ωω=

37 Dr. Peter AvitabileModal Analysis & Controls Laboratory22.451 Dynamic Systems – System Response
Response of Linear System Due to Periodic InputsFrom superposition, the total output is the sum of all then components as
( ) ( ) ( )[ ]∑∞
=ω∠+φ+ωω+=
1nonoono jnHtnsinjnHAjoHa
21
( )tyn
Note: This is also a Fourier Series with the same fundamental and harmonic frequencies as the input
( ) ( )∑∞
==
0nn tyty
The complete output Fourier Series is
( ) ( ) ( )∑∑∞=
−∞=
ω∞=
−∞=ω==
n
n
tjnno
n
nn
oeFjnHtyty
( ) ( ) tjnnon
oeFjnHty ωω=In complex form, this is written as

38 Dr. Peter AvitabileModal Analysis & Controls Laboratory22.451 Dynamic Systems – System Response
Response of Linear System Due to Periodic InputsConsider a simple mass spring dashpot system that is under steady state sinusoidal excitation (but not a of a SDOF system
nω
( ) ( )tsintf ω= ( )th ( ) ( )φ+ω= tsinAty
( )ωjf ( )ωjh ( )ωjy
SystemTime Domain
Frequency Domain
FFT IFT

39 Dr. Peter AvitabileModal Analysis & Controls Laboratory22.451 Dynamic Systems – System Response
Response of Linear System Due to Periodic InputsNow consider excitation at the natural frequency, ,of the SDOF system
nω

40 Dr. Peter AvitabileModal Analysis & Controls Laboratory22.451 Dynamic Systems – System Response
Response of Linear System Due to Periodic InputsNow consider a periodic input which is not sinusoidal. However, the Fourier Series representation is nothing more than the sum of different amplitude sine waves.

41 Dr. Peter AvitabileModal Analysis & Controls Laboratory22.451 Dynamic Systems – System Response
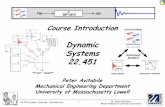
Response of Linear System Due to Periodic Inputs
The first-order electric network shown in Fig. 15.7 is excited with the sawtooth function. Find an expression for the series representing the output Vout(t).
Example 15.7

42 Dr. Peter AvitabileModal Analysis & Controls Laboratory22.451 Dynamic Systems – System Response
Response of Linear System Due to Periodic Inputs
( )1RCs
1sH+
=
Example 15.7 (cont.)The electric network has a transfer function
and therefore has a frequency response function
( )( ) 1RC
1jH2 +ω
=ω
( ) ( ) ( )∑∞
=
+ω
π−
=1n
o
1ntnsin
n12tu
( ) ( )RCtanjH 1 ω−=ω∠ −
the input function u(t) may be represented by the Fourier Series

43 Dr. Peter AvitabileModal Analysis & Controls Laboratory22.451 Dynamic Systems – System Response
Response of Linear System Due to Periodic Inputs
( ) ( ) ( ) ( )[ ]∑∞
=
+ω∠+ω
π−
ω=1n
oo
1njnHtnsin
n12|jH|ty
( ) ( )( )
( )[ ]∑∞
=
−+
ω−+ω
+ωπ
−=
1no
1o2
o
1nRCntantnsin
1RCnn
12ty
RCT π=
Example 15.7 (cont.)At the output the series representation is
As an example consider the response if the period of the input is chosen to be so that ,then
RC2
o =ω
( ) ( )( )
( )
−+
+π
−= −
∞
=
+
∑ n2tantRC
n2sin1n2n
12ty 1
1n2
1n

44 Dr. Peter AvitabileModal Analysis & Controls Laboratory22.451 Dynamic Systems – System Response
Response of Linear System Due to Periodic Inputs
RCT π=
Example 15.7 (cont.)
RC2
o =ω
Figure 15.8 shows the computer response found by summing the first 100 terms of the Fourier Series.

45 Dr. Peter AvitabileModal Analysis & Controls Laboratory22.451 Dynamic Systems – System Response
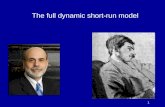
Response of Linear System Due to Periodic Inputs
( )π<≤π−
π<≤=
2t s/m 10t0 s/m 10
tVin
Example 15.8A cart shown in Figure 15.9a, with a mass m=1.0 kg is supported on low friction bearings that exhibit a viscous drag B = 0.2 N-s/m and is coupled through a spring with stiffness K=25 N/m to a velocity source with a magnitude of 10 m/s but which switches direction every π seconds as shown in Figure 15.9b.
( )tvmThe task is to find the resulting velocity of the mass

46 Dr. Peter AvitabileModal Analysis & Controls Laboratory22.451 Dynamic Systems – System Response
Response of Linear System Due to Periodic InputsExample 15.8 (cont.)
( ) ( ) ( )
+ω+ω+ω
π= ...t5sin
51t3sin
31tsin20
ooo
π= 2T( )tΩThe input has a period of and a fundamental frequency of . The Fourier Series for the input contains only odd harmonics:
rad/s1T/2o =π=ω
( ) ( )[ ]∑∞
=ω−
−π=
1not1n2sin
1n2120tu

47 Dr. Peter AvitabileModal Analysis & Controls Laboratory22.451 Dynamic Systems – System Response
Response of Linear System Due to Periodic InputsExample 15.8 (cont.)
( ) ( )[ ]n2.0jn2525jnH 2o+−
=ω
The frequency response of the system is
( ) ( ) ω+ω−=ω
2.0j2525jH 2
radians/s nn o =ω
which when evaluated at the harmonic frequencies of the inputis

48 Dr. Peter AvitabileModal Analysis & Controls Laboratory22.451 Dynamic Systems – System Response
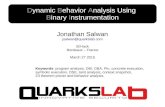
Response of Linear System Due to Periodic InputsExample 15.8 (cont.)
The following table summarizes the first five odd spectral components at the system input and output.

49 Dr. Peter AvitabileModal Analysis & Controls Laboratory22.451 Dynamic Systems – System Response
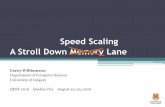
Response of Linear System Due to Periodic InputsExample 15.8 (cont.)
Figure 15-10a shows the computed frequency response magnitude for the system and the relative gains and phase shifts (rad) associated with the first five terms in the series.

50 Dr. Peter AvitabileModal Analysis & Controls Laboratory22.451 Dynamic Systems – System Response