Drag Coefficient, Dynamic Roughness and Reference … Parameters and Reference Wind Speed 401 On the...
15
Click here to load reader
Transcript of Drag Coefficient, Dynamic Roughness and Reference … Parameters and Reference Wind Speed 401 On the...

399
Journal of Oceanography, Vol. 61, pp. 399 to 413, 2005
Keywords:⋅⋅⋅⋅⋅ Drag coefficient,⋅⋅⋅⋅⋅ dynamic rough-ness,
⋅⋅⋅⋅⋅ wavelength,⋅⋅⋅⋅⋅ wave age,⋅⋅⋅⋅⋅ dimensionlessfrequency.
* E-mail address: [email protected]
Copyright © The Oceanographic Society of Japan.
Drag Coefficient, Dynamic Roughness and ReferenceWind Speed
PAUL A. HWANG*
Oceanography Division, Naval Research Laboratory, Stennis Space Center, MS 39529-5004, U.S.A.
(Received 15 May 2004; in revised form 23 July 2004; accepted 26 July 2004)
Surface waves are the roughness element of the ocean surface. The parameterizationof the drag coefficient of the ocean surface is simplified by referencing to wind speedat an elevation proportional to the characteristic wavelength. The dynamic rough-ness is analytically related to the drag coefficient. Under the assumption of fetch lim-ited wave growth condition, various empirical functions of the dynamic roughnesscan be converted to equivalent expressions for comparison. For datasets covering awide range of the dimensionless frequency (inverse wave age), it is important to ac-count for the variable rate of wave development at different wave ages. As a result,the dependence of the Charnock parameter on wave age is nonmonotonic. Finally,the analysis presented here suggests that the significant wave steepness is a sensitiveproperty of the ocean surface and a single variable normalization of the dynamicroughness using a wavelength or wave height parameter actually produces more ro-bust functions than bi-variable normalizations using wave height and wave slope.
than the dynamical significance of the 10-m elevation inthe marine boundary layer. Because the influence of sur-face waves decays exponentially with the wavelengthserving as the vertical length scale (e.g., Miles, 1957;Phillips, 1977), the dynamically meaningful referenceelevation should be the characteristic wavelength, λp (e.g.,Kitaigorodskii, 1973; Stewart, 1974; Donelan, 1990;Makin and Kudryavtsev, 1999, 2002; Makin, 2003;Hwang, 2004, 2005). In this paper, the reference windspeed, Uλ/2, is taken at the elevation of one-half wave-length. The drag coefficient, dimensionless roughness(e.g., kpz0, where z0 is the dynamic roughness and kp =2π/λp the characteristic wavenumber, or the Charnockparameter (1955) z0∗ = gz0/u∗
2, where g is the gravita-tional acceleration and u∗ the friction velocity) anddimensionless frequency, ω∗ (=Uλ/2/cp, the inverse waveage for deep water condition, cp is the phase velocity forthe spectral peak component), are uniquely defined (Sec-tion 2). A comparison of C10 and Cλ/2, the drag coeffi-cient referenced to U10 and Uλ/2, respectively, is carriedout. The systematic influence of surface wavelength onC10 can be detected in field measurements taken underfetch limited wave conditions (e.g., Donelan, 1979; Merziand Graf, 1985; Anctil and Donelan, 1996; Janssen, 1997).The wavelength influence is mostly removed when Cλ/2is processed instead of C10. The detail is given by Hwang(2004, 2005). A brief summary is presented in Section 3.The results on the analysis of the drag coefficient indi-
1. IntroductionWithin the framework of the logarithmic wind pro-
file, the drag coefficient, CD, and dynamic roughness, z0,are correlated deterministically. The analytical equationrelating these two parameters can be readily derived.Analyses of field data on these two quantities, however,have produced many confusing or conflicting results. Forexample, the drag coefficient, a dimensionless parameter,is frequently expressed as a linear or nonlinear functionof wind speed, U, a dimensional parameter. From dimen-sional considerations, such expressions are clearly inac-curate unless the system has a constant reference veloc-ity, which is certainly not the case for air-sea interactionproblems involving surface waves. The expression ofCD(U) is apparently stipulated by operational needs andpractical considerations. The adaptation of such functionalform masks the influence of wave development and seastate factors, and eventually introduces errors into the endresults of the analyses on air-sea interaction processes.
Another serious issue in the analysis of CD and z0 isthe reference wind speed, which is typically taken as U10,the neutral wind speed at 10 m elevation. Fixing the heightfor wind speed reference at 10 m is also obviously de-rived from operational or practical considerations rather

400 P. A. Hwang
cate that RC = C10/Cλ/2 increases with ω∗ when λp < 20 mand decreases with ω∗ when λp > 20 m. The controversyof the roughness dependence on wave age (e.g., Donelan,1990; Toba et al., 1990; Donelan et al., 1993; Jones andToba, 2001) can be attributed partially to this behavior,and will be discussed in more detail in Section 4. It isnoted that Oost et al. (2002) also demonstrate an excel-lent correlation between u∗ and Uλ/2 or Uλ for data underneutral stratification and wind sea dominant conditions,with a correlation coefficient of 0.964. Empirical func-tions of Cλ were given.
Several different expressions of the dimensionlessroughness have been proposed (e.g., Donelan, 1990; Tobaet al., 1990; Smith et al., 1992; Donelan et al., 1993;Taylor and Yelland, 2001). For a wave system under ac-tive wind forcing, the robust fetch growth functions canbe applied to compare these different expressions. Theresults are very sensitive to the exponent of the powerlaw relating the dimensionless wave energy and wave fre-quency, e∗ (ω∗ ). Hereafter the exponent is referred to asthe development rate. Because the variation of the devel-opment rate is substantial at different ω∗ ranges of thefield data (Appendix A), opposite trends in the depend-ence of z0∗ on ω∗ in different ω∗ ranges can occur. Thedetail is described in Section 4. Additional discussionson the scaling issues and dimensional analysis are givenin Section 5. Finally, a summary is presented in Section6.
2. Reference Wind Speed for the Drag Coefficientand Dynamic RoughnessBased on the logarithmic wind speed profile for neu-
tral stratification, the vertical distribution of the windspeed is given by
Uu z
z
u k z
k zzp
p
= = ( )∗ ∗
κ κln ln ,
0 0
1
where κ is the von Kármán constant and z is the verticalelevation measured from the mean water surface. In thesecond part of (1), the wavenumber is introduced to em-phasize that the relevant vertical length scale is the sur-face wavelength. Referenced to Uλ/2, the drag coefficientCλ/2 = u∗
2/Uλ/22 can be derived from (1)
Ck z zp
λ κπ
κπω/ ln ln ,2
0
2
02
21 1
2=
=
( )−
∗ ∗∗
−
where ω∗∗ = ωpu∗ /g is a dimensionless frequency. In thisand the next sections, the deep water wave condition isassumed for simplicity. Effects of finite water depth willbe introduced in Section 4. Evidence of logarithmic pro-
file holds to height of λ/2 is frequently observed in labo-ratory measurements. In the field, the dataset of Merziand Graf (1985) is an excellent example. They conductedwind stress measurements in Lake Geneva. The measure-ment station is on the northern part of the lake. The recordsselected for analysis are based on steady southwesterlyevents and well-behaved wind profiles (60 cases), for thefetch-growth wave conditions. The friction velocity isderived from the profile method applied to measurementsby five anemometers mounted at 12.12, 7.27, 4.27, 2.42and 1.80 m above the mean water surface. The maximumand minimum wavelengths in this dataset are 19.0 and8.6 m, so their measurements do reach to the elevation ofλ/2 with well-behaved wind profiles.
In deep water ω∗∗ = ωpu∗ /g = u∗ /cp is a measure ofthe inverse wave age. As mentioned earlier, thedimensionless frequency can also be defined using Uλ/2and g, that is, ω∗ = ωpUλ/2/g = Uλ/2/cp. The two expres-sions of the dimensionless frequency are related byω∗∗
2 = ω∗2Cλ/2, thus, (2) can also be expressed as
Cz Cλ
λκπ
ω//
ln .20 2
2
21
3=
( )∗ ∗
−
Depending on the functional form of the dimensionlessroughness expressed as the Charnock parameter, z0∗ , ei-ther (2) or (3) may be more convenient to use for compu-tation. For example, if z0∗ is assumed constant or a func-tion of ω∗∗ , (2) is obviously a better choice. Cλ/2(ω∗∗ ) canbe easily computed with ω∗∗ as the only independent vari-able. To present Cλ/2(ω∗ ), ω∗ = ω∗∗ Cλ/2
0.5 can be calcu-lated once Cλ/2(ω∗∗ ) is evaluated. In comparison, to ob-tain Cλ/2(ω∗ ) using (3) would require nonlinear iterations.
0 0.1 0.2 0.3 0.40
0.5
1
1.5
2
2.5
3
3.5x 10
−3
u*/c
p
Cλ/
2
(a)
0.0140.0160.0180.020 z
0*
0 2 4 60
0.5
1
1.5
2
2.5
3
3.5x 10
−3
Uλ/2/c
p
Cλ/
2
(b)
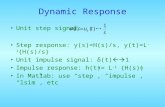
Fig. 1. Dimensionless expressions of the drag coefficient,(a) Cλ /2(ω∗ ), (b) Cλ /2(ω∗∗ ), with z0∗ as a parameter.

Drag Parameters and Reference Wind Speed 401
On the other hand, if the dynamic roughness is expressedas z0/ηrms = f(kpηrms, ω∗ ), where ηrms is the root meansquare (rms) surface elevation (e.g., Donelan, 1990; Smithet al., 1992; Donelan et al., 1993; Anctil and Donelan,1996; Taylor and Yelland, 2001), the functions transformto z0∗ Cλ/2 = f(ω∗ ), and (3) is easier for application. Thedetail is described further in Section 4.
For the purpose of illustration, the functional depend-ence of Cλ/2(ω∗∗ ) and Cλ/2(ω∗ ) are presented in Figs. 1(a)and (b), respectively for a range of z0∗ between 0.014 and0.020. The magnitude of Cλ/2 varies from about 0.001 to0.003, which is within the commonly observed range. Theincreasing trend of Cλ/2 with wind speed (for a constantcp) is in agreement with various linear or nonlinear ex-pressions of C10(U10), and (2) and (3) are dimensionallyconsistent.
Published papers rarely report Cλ/2 and Uλ/2. Instead,the experimental results are usually presented as C10 andU10, the drag coefficient and reference wind speed at 10m elevation. Although quantities referenced to a fixedelevation are more convenient to use and may even benecessary from an operational point of view, such utili-zation does create considerable problems for subsequentinvestigations of the air-sea interaction processes, as willbe described further in the following sections. Hwang(2005) presents parameterization functions of Cλ /2 onωpU10/g and U10/cp for practical applications. The resultillustrates that the wind stress computed from U10 usingCλ/2 parameterizations is more accurate than the windstress calculated with various C10 parameterization func-tions. A brief summary of that study is presented in Ap-pendix B.
3. Drag CoefficientUsing the reference wind speed at 10 m elevation,
the drag coefficient becomes
Ck
k z
k
zp
p
p10
0
2
02
21 10 1 10
4=
=
( )−
∗ ∗∗
−
κ κ ωln ln .
The effect of using a fixed-elevation reference wind speedon the drag coefficient can be quantified by the ratio
RC
C
k z
k
k z
z
k
z
Cp
p
p
p
= =
=
( )∗ ∗∗
∗ ∗∗
10
2
0
0
2
02
02
2
10 105
λ
π πω
ω/
ln
ln
ln
ln
.
Inspecting (5), it is quite obvious that RC varies with sur-
face wavelength, λ p = 2π/kp, in addition to thedimensionless parameter kpz0 (=z0∗ ω∗∗
2 = z0∗ ω∗2Cλ/2). In
particular, the variation of RC(ω∗∗ ) or RC(ω∗ ) differs inthe two wavelength regions separated by λp = 20 m, un-der which condition z = 10 m = λp/2 is the proper refer-ence level: RC increases with ω∗ for λp < 20 m, and thetrend reverses for λp > 20 m. The impact is especiallylarge at young sea state and is still substantial at moremature wave conditions. The drag coefficient presentedin Fig. 1 is recast in C10 and plotted in Fig. 2 for threewavelengths λp = 10, 20 and 40 m to illustrate the addi-tional kp influence on the C10 expression (4). The resultsare presented first in dimensionless forms C10(u∗ /cp) andC10(U10/cp) in Figs. 2(a) and (b), respectively. Compar-ing Fig. 2 with Fig. 1 it is readily seen that a significantincrease in data scatter can be expected when the dragcoefficient is represented by C10. The situation is morecomplicated when the dimensionally inconsistent formC10(U10) is used (Fig. 2(c)). The increasing trend ofC10(U10/cp) with increasing λp for a given z0∗ seems todisappear when viewed as C10(U10). The apparent disap-pearance of the wavelength factor in C10(U10) as shownin Fig. 2(c) is deceptive as it is the result of the assump-tion of constant z0∗ used in these illustrative examples.Applying the dispersion relation, (4) can be rewritten as
Cg
z u
g
z C U100
2
2
0 10 102
21 10 1 10
4=
=
( )∗ ∗
−
∗
−
κ κln ln . a
If z0∗ is not constant but varies as a function of u∗ /cp orU10/cp (see Section 4), say z0∗ = A1 ( / )U cp
a10
1 , the prod-
uct z0∗ U102 in (4a) becomes A1 U ca
pa
102 1 1+ − . The addi-
tional wavelength effect through cp becomes evident. Incomparison, with (2) or (3), when z0∗ is expressed as a
0 0.2 0.40.5
1
1.5
2
2.5
3
3.5
4x 10
−3
u*/c
p
C10
λp
40 m
20 m
10 m
(a)
0 5 100.5
1
1.5
2
2.5
3
3.5
4x 10
−3
U10
/cp
C10
(b)
0 20 40 600.5
1
1.5
2
2.5
3
3.5
4x 10
−3
U10
(m/s)
C10
(c)
Fig. 2. Drag coefficient presented as (a) C10(u∗ /cp), (b) C10(U10/cp), and (c) C10(U10). The computations are based on thesame conditions presented in Fig. 1.

402 P. A. Hwang
function of ω∗ or ω∗∗ , a unique correlation of Cλ/2(ω∗ ) orCλ/2(ω∗∗ ) is established. It is also clear from (4a) that thereference velocity scale in the expression of C10(U10) isthe constant (gzref)
0.5 with zref = 10 m. As noted previ-ously, the significance of this constant reference velocityscale in the marine boundary layer dynamics is rathervague.
Hwang (2004) applies the above analysis of wave-length parameterization of the ocean surface drag coeffi-cient to measurements from four field experiments con-ducted under fetch limited wave growth conditions(Donelan, 1979; Merzi and Graf, 1985; Anctil andDonelan, 1996; and Janssen, 1997). The results show thata strong similarity relation exists when the drag coeffi-cient is expressed as Cλ/2(ω∗∗ ). The correlation coefficient,Q, of the scatter plot is 0.95 and the relative rms differ-ence, S, is 0.017 (Fig. 3(a)). For comparison, the corre-sponding statistics for C10(ω∗∗ ) are 0.74 and 0.028 (Fig.3(b)). The range of wavelengths is [3.3, 5.7], [8.6, 19.0],[28.6, 75.8] and [56.4, 101.6] for Donelan (1979), Merziand Graf (1985), Anctil and Donelan (1996) and Janssen(1997), respectively. Stratification with wavelength in theC10 representation of the ocean surface drag coefficientis quite apparent (Fig. 3(b)). More discussions on thewavelength scaling of the drag coefficient and validationwith field data can be found in Hwang (2004, 2005).
4. Dynamic Roughness
4.1 Typical parameterization functionsAs mentioned earlier, recent investigations of the
dynamic roughness have concluded that the Charnock
parameter is not a constant and z0 parameterization needsto incorporate wave parameters. Kitaigorodskii andVolkov (1965) consider the wind-wave momentum trans-fer in the frame of reference moving with the phase speedof surface waves. The logarithmic wind profile then leadsto the following dimensionless expression of the dynamicroughness
z c
urms
p0 6η
κ~ exp .−
( )∗
A simplified form is given by Kitaigorodskii (1973)
z c
urms
p0 0 3 7η
κ= −
( )∗
. exp .
In the three decades following the introduction of (7),many experiments were conducted. The results generallyconfirm the effects of surface waves on the drag coeffi-cient and dynamic roughness, but the wave related signalin the measured stress is not sufficiently clear for research-ers “to agree on its form, much less its size” as observedby Donelan (1990), who provides an excellent review ofthe state of development. He further concludes that “Aconsistent parameterization of the roughness of sea sur-face in terms of the wave field will only be possible whenwe are able to strengthen the wave related signal (by wid-ening the range of wave development in our observations)and to suppress the noise in our measurements. Given
10−2
10−1
10−3
10−2
ωpu
*/g
Cλ/
2
(a)Donelan 1979Merzi & Graf 1985Anctil & Donelan 1996Janssen 1997Hwang 2004
10−2
10−1
10−3
10−2
ωpu
*/g
C10
(b)
Fig. 3. Field measurements of wind stress in fetch limited conditions presented as (a) Cλ /2(ω∗∗ ), and (b) C10(ω∗∗ ). The range ofwavelengths is [3.3, 5.7], [8.6, 19.0], [28.6, 75.8] and [56.4, 101.6] for Donelan (1979), Merzi and Graf (1985), Anctil andDonelan (1996) and Janssen (1997), respectively.

Drag Parameters and Reference Wind Speed 403
the requirement for stationarity and horizontal homoge-neity in the wind, fetch-limited studies are probably theonly way to achieve the former goal.” With this in mind,he assembled a dataset of field measurements covering awide range of the wave age parameter (U10/cp ≅ 0.8–5)and carefully screened for fetch-limited requirements. Thedata scatter is considerable but the result show a clearregression trend of
zA
v
crms p
a
00
0
8η
=
( ),
where the velocity scale v can be U10, Uλ/2 or u∗ . To fur-ther widen the wave age coverage, laboratory results areadded but the two data populations show clear differences.The coefficients and exponents [A0, a0] for the fielddataset are [5.53 × 10–4, 2.66], [3.70 × 10–4, 3.38] and[1.84, 2.53], respectively for U10, Uλ/2 and u∗ serving asthe scaling velocity. Smith et al. (1992) report a similarcorrelation but with a larger exponent for the fitting pa-rameters [5.32 × 10–4, 3.53] for their data in the range ofU10/cp between 2 and 4 (the plot shown in their figure 12is off by a factor of 2). Donelan et al. (1993) commentsthat the curve
z U
cA
rms pzU
azU0 4 10
2 7
5 5 10 9η
ω= ×
= ( )−
∗.
.
fits the combined datasets equally well as the steeper fit-ting function suggested by Smith et al. (1992).
Anctil and Donelan (1996) and Taylor and Yelland(2001) present analyses showing that including the seasurface slope parameter can reduce fitting error. The rootmean square slope is used in the work by Anctil andDonelan (1996). Taylor and Yelland (2001) use the ratioof significant wave height and peak wavelength as a char-acteristic surface steepness. Using the notations of thispaper, Taylor and Yelland’s (2001) equation can be ex-pressed as
zs A s
rmszs
azs0 2 25629 07 10η
= = ( )∗ ∗. ,.
where s∗ = kp2ηrms
2.Toba et al. (1990) use u∗ and ωp instead of wave
height or wave slope to normalize the dynamic rough-ness, and suggest that
z
up0 0 025 11
ωγ γ
∗= = ( ), . .
4.2 Conversion to equivalent expressionsAs described in Section 2, the dynamic roughness
and wind stress or drag coefficient are uniquely connectedwhen wind speed is referenced at an elevation propor-tional to the surface wavelength (2). The dimensionlessform of dynamic roughness is explicitly kpz0, which canappear in several difference forms through the use of thedispersion relation
ωp p pgk k h2 12= ( )tanh ,
where h is water depth:
k z zu
ck h z
k h
z Ck h
pp
pp
p
0 0
2
02
02
2
1
113
=
=
= ( )
∗∗
∗ ∗∗
∗ ∗
tanhtanh
tanh./
ω
ω λ
The functional dependence of z0 on wind and wave pa-rameters is not yet fully established, as reflected by thelarge number of parameterization functions reported inthe literature. The functions outlined in Subsection 4.1represent but a small sample. Here the behavior of z0∗ isinvestigated with three generic functions that explicitlyincorporate the surface wave parameters. The genericfunctions are converted to equivalent expressions for com-parison assuming fetch limited wave conditions. Thedimensionless wave frequency and wave energy are ex-pressed as ω∗∗ = ωpu∗ /g ≡ (u∗ /cp)tanhkh and e∗∗ = ηrms
2g2/u∗
4. The wave steepness can be expressed in terms of ω∗∗and e∗∗ by s∗ = kp
2ηrms2 ≡ e∗∗ ω∗∗
4/tanh2kh. For clarity, onlythe results with (u∗ /cp) scaling in (13) are given here.a. z0/ηrms ~ u∗ /cp (e.g., Donelan, 1990; Smith et al., 1992)
Expressing the dimensionless roughness as
zA
u
crmszu
p
azu
0 14η
=
( )∗ ,
(13) can be written as
z A eu
czup
azu
00 5 15∗ ∗∗
∗=
( ). .
Using the fetch law (Appendix A)
e Au
ceup
aeu
∗∗∗=
( ), 16

404 P. A. Hwang
then whether z0∗ increases or decreases with u∗ /cp dependson whether (0.5aeu + azu) is greater than or less than zero.One common practice in the analysis of dynamic rough-ness data is to assume that e∗∗ (u∗ /cp) can be expressed asa simple power-law function, that is, aeu is constant. Whenthe range of u∗ /cp is large, this assumption is inaccurate.Field measurements show that aeu is negative and themagnitude increases with u∗ /cp (e.g., Donelan et al., 1985;Young, 1999; Hwang and Wang, 2004; and the resultssummarized in Appendix A).b. z0/ηrms ~ kpηrms (e.g., Anctil and Donelan, 1996; Taylor
and Yelland, 2001)This relation can be written as
zA s
rmszs
azs0 17∗∗= ( )
η.
With the substitution of s∗ = kp2ηrms
2 = e∗∗ ω∗∗4/tanh2kh =
e∗∗ (u∗ /cp)4tanh2kh, (13) can be written as
z A eu
ckhzs
a
p
a
azs
zs
zs0
0 5
4
2 18∗ ∗∗+ ∗=
( ). tanh .
Substituting (16) to (18), the exponent of z0∗ (u∗ /cp) is4azs + (0.5 + azs)aeu and can be either positive or negative.c. z0ωp/u∗ ~ constant (Toba et al., 1990)
With the substitution of
z
up0 19
ωγ
∗= = ( )a constant,
(19) becomes
zu
c khp0
1
1120∗
∗−
∗∗−=
= ( )γ γω
tanh.
For this functional form, the roughness z0∗ is expected todecrease with increasing u∗ /cp.
As shown above, various expressions of thedimensionless roughness can be recast into z0∗ (ω∗ ) withthe help of fetch-growth functions. Ideally, the fetch func-tions should be scaled with Uλ/2 or u∗ , e.g.,
e A x A x e Aexa
xa
eaex x e
∗ ∗ ∗ ∗ ∗ ∗= = = ( ), , , –ω ωω ωω ω 21a c
where e∗ = ηrms2g2/Uλ/2
4, x∗ = xg/Uλ/22 and ω∗ = ωpUλ/2/g,
(9) to (11) become
z C A AzU ea azU e
0 20 5 0 5 22∗ ∗
+= ( )λ ωω ω/
. . ,
z C A Azs ea a a azs zs zs e
0 20 5 4 0 5 23∗
+( )∗
+ +( )= ( )λ ω ω ω/
. . ,
z C0 20 5 1 24∗ ∗
−= ( )λ γω/. .
Currently, fetch growth data report U10 as the refer-ence wind speed. Conversion to u∗ relies on the applica-tion of a C10(U10) formula. As already discussed in Sec-tion 2, wave influences cannot be retrieved without ex-plicit incorporation of wavelength into the C10 formula.
100
101
10−3
10−2
10−1
ω*
z 0*
(a)
Donelan 1990Smith et al. 1992Taylor and Yelland 2001
10−2
10−1
100
10−3
10−2
10−1
ω**
z 0*
(b)
100
101
10−3
10−2
ω*
Cλ/
2
(c)
10−2
10−1
100
10−3
10−2
ω**
Cλ/
2
Donelan 1990Smith et al. 1992Taylor and Yelland 2001
(d)
Fig. 4. Computed results showing the wave-age dependence of dynamic roughness and drag coefficient based on several differentparameterization functions (see legend) recast into same functional form through the application of fetch-limited growthlaws: (a) z0∗ (ω∗ ), (b) z0∗ (ω∗∗ ), (c) Cλ /2(ω∗ ), and (d) Cλ/2(ω∗∗ ).

Drag Parameters and Reference Wind Speed 405
In the absence of ideal fetch growth laws, the ones scaledwith U10 (Appendix A) are employed in the followingdiscussions. For (22), the observed exponent azU rangesfrom 2.66 to 3.53, and the exponent aeω ranges from –2.7at ω∗ ≈ 0.8 to –4.1 at ω∗ ≈ 6 (Fig. A2), so z0∗ Cλ/2 ~ω∗
(0.61–2.28). With the observed exponent of Cλ/2(ω∗ ) about1 (estimated from the fetch limited field data reported byDonelan, 1979; Merzi and Graf, 1985; Anctil and Donelan,1996; Janssen, 1997), the exponent in the power law ofz0∗ (ω∗ ) can indeed become negative at the high ω∗ range.Similarly, for (23) using azs = 2.25 (Taylor and Yelland,2001), the exponent of z0∗ Cλ/2(ω∗ ) is 9 + 2.75aeω, andranges from 2.28 at ω∗ ≈ 0.8 to –5.43 at ω∗ ≈ 6. Figures4(a) and (b) shows the numerical computations of thedynamic roughness using wave-age-dependent Aeω andaeω (Appendix A) and two sets of AzU and azU [5.53 ×10–4, 2.66] and [5.32 × 10–4, 3.53], representing (22); andAzs and azs [630.51, 2.25] representing (23). The corre-sponding drag coefficient computed from thedimensionless roughness using (2) is shown in Figs. 4(c)and (d) as a function of ω∗ and ω∗∗ , respectively. For therange ω∗ < 2 or ω∗∗ < 0.1, the calculated results fromthese three equations are quite similar. As ω∗ or ω∗∗ in-creases the three curves diverge. In particular the steep-ness dependent formulation proposed by Taylor andYelland (2001) produces a decreasing trend of the dragcoefficient in high ω∗ or ω∗∗ conditions.
4.3 Comparison with dataExperimental data collected over a wide ω∗ range
show a similar nonmonotonic trend of z0∗ (ω∗ ) as displayed
in Fig. 4. This subsection presents comparisons with sev-eral datasets. In addition to the three formulas summa-rized in Subsection 4.2, two additional parameterizationfunctions are also included for comparison. The first oneis given by Volkov (2001), derived from relating z0 witha wave-age dependent spectral model,
z
c
u
c
u
c
uc
u
p p p
p0
0 03 0 14 0 35 35
0 008 35
25∗∗ ∗ ∗
∗
=
−
< <
>
( ). exp . , .
. , .
The second is given by Hwang (2004), obtained from leastsquare fitting of field data obtained under fetch limitedwave conditions (Fig. 3(a))
Cλ ω/.. ,2
0 7040 0122 26= ( )∗∗
which can be converted to z0∗ (ω∗∗ ) through (2) for thedeep water condition,
z C02
20 5
2 0 704 0 50 0122 27
∗ ∗∗− −
∗∗−
∗∗−
= −[ ]= − ( )
( )
πω κ
πω κ ω
λexp
exp . .
/.
. .
Figure 5 compares the calculated results with the datareported by Toba et al. (1990). As mentioned earlier, the
10−2
10−1
100
101
10−3
10−2
10−1
100
101
u*/c
p
z 0*
Toba et al. z0* correction
Kawai et al. 1977Donelan 1979Merzi & Graf 1985Toba et al. (Bass Strait, original) 1990Toba et al. (Bass Strait, corrected) 1990Hamada 1963 LabKunishi 1963 LabKunishi & Imasato 1966 LabToba 1961 1972 LabHsu et al. 1982 LabMasuda & Kusaba 1987 LabDonelan 1990Smith et al. 1992Taylor and Yelland 2001Volkov 2001Hwang 2004
Fig. 5. Wave age dependence of the dynamic roughness and comparison of computations with measurements. Field data are fromToba et al. (1990). Curves are (22)–(27). Both original and corrected versions of the Bass Strait data are shown.

406 P. A. Hwang
Bass Strait data reported by Toba et al. (1990) do not havedirect wind stress measurement and u∗ is computed froma wind-dependent empirical formula connecting U10, waveperiod and wave height. From the analysis presented inSection 2, evaluation of u∗ using U10 is quite tricky. Inparticular, if C10 is used in place of Cλ/2 in (27), which isequivalent to discounting the wavelength factor when thedrag coefficient is referenced to U10, the error in z0∗ esti-mation can be quantified by the ratio
Rz
z
C
C kz = =−( )−( ) = = ( )∗
∗
−
−0 10
0
100 5
20 5 10 20
28exp
exp,
.
/.
κ
κπ λ
λ
where subscript 10 for z0 ∗ emphasizes that thedimensionless roughness is calculated from using C10 inplace of Cλ/2 in (27). The roughness calculated using C10may represent the true dynamic roughness when λp = 20m. For other wavelengths Rz is linearly proportional tothe wavelength. This may explain the much larger mag-nitude of z0∗ 10 (calculated from U10) of the Bass Straitdata in comparison with other datasets with direct windstress measurements. Using wavelengths calculated fromthe wave periods recovered from figures 12 and 13 ofToba et al. (1990), the correction factor (28) is applied tothe Bass Strait data. As shown in Fig. 5, the magnitudesof the corrected Bass Strait data lie in a much more rea-sonable range. The overall trend of the calculations basedon (22)–(27) is in agreement with the large collection ofdata.
Figure 6 shows the comparison with six datasets as-sembled by Donelan et al. (1993). The Atlantic data are
distributed over a narrow u∗ /cp range and the magnitudesof the roughness spread over a very wide range. This sug-gests strong swell influence. The function derived fromfetch limited data sets (26) and (27) serves as the upperbound of the data cloud in this collection. Given the largedata scatter, the agreement between computations andmeasurements is judged to be reasonably good.
5. Discussions
5.1 Reference length scaleHwang (2004) emphasizes that if the reference wind
speed is taken at an elevation proportional to the charac-teristic wavelength, kpz0 becomes the natural expressionof the dimensionless roughness (2). Figures 7(a) and (b)present a comparison of the dimensionless roughness ex-pressed as z0∗ and kpz0 for the fetch limited data shown inFig. 3. For z0∗ (ω∗∗ ), the statistics of correlation coeffi-cient and normalized rms difference (Q, S) = (0.80, 0.16),which are considerably worse than (0.95, 0.062) forkpz0(ω∗∗ ). The dimensionless roughness expressed as z0/Hs (Fig. 7(c)) also achieves very good correlation statis-tics, with (Q, S) = (0.93, 0.076), only slightly worse thanthose of the kpz0 function. The almost equivalent perform-ance of kp and Hs serving as the vertical length scale fornormalization is expected as a consequence of the simi-larity properties of wind-generated ocean wave spectrumfor wind-sea dominant conditions. Although “sand rough-ness” equivalence is sometimes evoked to explain theproportionality between z0 and Hs, it is noted that the ra-tio z0/Hs expands several orders of magnitude (Fig. 7(c)),a range considerably larger than the observed ratio be-tween the equivalent roughness and actual height of pro-
10−2
10−1
100
101
10−3
10−2
10−1
100
u*/c
p
z 0*
Atlantic longAtlantic shortHEXOSOntarioDonelan tankKeller tankDonelan 1990Smith et al. 1992Taylor and Yelland 2001Volkov 2001Hwang 2004
Fig. 6. Same as Fig. 5 but for the data assembled by Donelan et al. (1993).

Drag Parameters and Reference Wind Speed 407
trusions in the measurement of fluid drag induced by regu-lar roughness patterns (e.g., Schlichting, 1968). The dif-ference suggests that for the ocean surface, drag compo-nents contributed by regular roughness geometry (surfacewaveform), such as skin friction and form drag, are onlypartial contributors to the total surface stress. Other dy-namic processes, such as flow separation attributed towave breaking, may be quite important (e.g., Banner andMelville, 1976; Kawai, 1982; Makin and Kudryavtsev,1999, 2002; Makin, 2003). While wave height and wave-length are both major characteristics of surface waves,wavelength may play a more important role because thedynamic influences of waves typically decayexponentially with wavelength serving as the length scaleof decay rate.
5.2 Dimensional analysisDimensional analysis has served as a powerful tool
in fluid mechanics for centuries. An important feature ofdimensional analysis is to search for the proper variablesthat can correlate the observed measurements into sim-plest expressions. That is, to collapse measurements intoa single curve if possible. The resulting dimensionlessparameters may reveal the physics of the underlying proc-esses. A good example is the analysis of drag coefficientof particles or pressure drop of pipe flows, which leadsto the dimensionless Reynolds number, one of the mostimportant dimensionless parameters in boundary layerphysics, revealing the balance between inertial and vis-cous force. For the wind drag on the ocean surface, a keyelement is that waves moderate the air-sea interface. Therepresentative velocity scale of the wave field is wavephase speed and the length scale is wavelength. If theseare chosen to normalize the observations, the measure-
ments can be collapsed into a single cluster of data points.Application of the concept to field data under wind seaconditions indeed improves the representation of the dragcoefficient considerably in comparison to C10parameterizations (Fig. 3 and Hwang, 2004, 2005).
On the other hand, the ability to group data in anorderly fashion through judicial choice of scaling factorsdoes not lead automatically to the discovery of the truephysics and mechanisms. The coupled air-sea interactionprocesses are very complicated and the analysis presentedabove represents a small increment of progress on theparameterization of the drag coefficient of the water sur-face under fetch limited wave conditions in the field en-vironment (Fig. 3). Counter examples showing a lack ofcorrelation between drag coefficient or dynamic rough-ness and wave parameters are abundant, especially inlaboratory experiments. Ueno and Deushi (2003) presenta comprehensive review of many such examples. Theyperform dimensional analysis of the dynamic roughnessparameter assuming wave effects are negligible. The re-sulting scaling length for z0 is a function of viscosity (ν),surface tension (τ), and gravity (g). Using the wave-in-dependent scaling, they are able to collapse several labo-ratory datasets of dynamic roughness measurements (com-pare their figures 3 and 4). Their scaling equation (21) isapplied to the fetch-limited and swell-influenced datasetsobtained in the ocean environment assembled by Hwang(2005). The results are displayed in Fig. 8. Because wa-ter temperature is not always reported in all datasets, thecomputation is performed for 5° and 15°C to illustratethe influence of water temperature on the result of thedimensionless parameters. Comparing the dimensionlessvs. dimensional representations (left panels vs. right pan-els), one gets the impression that the wave-independent
10−2
10−1
10−3
10−2
10−1
100
101
ω**
z 0*
Q=0.802, S=0.159
(a)
10−2
10−1
10−5
10−4
10−3
10−2
ω**
k pz 0
Q=0.949, S=0.062
(b)
10−2
10−1
10−4
10−3
10−2
10−1
ω**
z 0/Hs
Q=0.927, S=0.076
(c)
Fig. 7. Dimensionless roughness in terms of (a) z0∗ , (b) kpz0, and (c) z0/Hs, for fetch limited data shown in Fig. 3.

408 P. A. Hwang
scaling does not really reduce the scatter of data collectedfrom either fetch-limited or swell-influenced wave con-ditions in the field. Interestingly, while theirdimensionless function falls near the lower bound of thefetch-limited measurements (Fig. 8(a)), it runs throughthe center of the swell-influenced data (Fig. 8(c)). Thesignificance of such “agreement” with mixed sea data isnot clear. Indeed, the dimensionally inconsistent empiri-cal expression relating z0 and u∗ given by Keller et al.
(1992) also compares quite well with the mixed sea data(Fig. 8(d)). The physics involved in the coupled air-seainteraction processes remains challenging and elusive. Itis quite possible that among the intertwining factors af-fecting the wind drag on the water surface, the processesthat are important in the laboratory environment may betrivial for the field environment and vise versa. One can-not stress enough the importance of distinguishing thescale differences between laboratory and field, and the
105
106
107
10−7
10−6
10−5
10−4
(τ3/gν4)0.2u*3/g/ν
ν2 gz0/τ
2
Fetch limited
(a)T=15°T=5°Ueno & Deushi, 2003
10−1
100
10−4
10−3
10−2
u* (m/s)
z 0 (m
)
(b)
Field dataKeller et al., 1992
104
105
106
107
10−10
10−9
10−8
10−7
10−6
10−5
10−4
(τ3/gν4)0.2u*3/g/ν
ν2 gz0/τ
2
Swell influenced
(c)
10−1
100
10−7
10−6
10−5
10−4
10−3
10−2
u* (m/s)
z 0 (m
)
(d)
Field dataKeller et al., 1992
10−2
100
10−6
10−5
10−4
10−3
10−2
10−1
e *
s* ω
*
1. SMB (CERC) 19772. Hasselmann et al. 19733.U Kahma 19814. Donelan et al. 19855. Dobson et al. 19896. Donelan et al. 19927.S Kahma and Calkoen 1994 .8.U Kahma and Calkoen 19949.C Kahma and Calkoen 199410. Young 199911. Hwang & Wang (1) 200412. Hwang & Wang (2) 2004
100
101
10−3
10−2
ω*
s *
(b)First orderSecond order
100
102
104
106
10−3
10−2
x*
s *
(c)
(a)
Fig. 8. Application of wave-independent scaling of z0 (Ueno and Deushi, 2003) to the field data. The top panels (a), (b) are fetch-limited wave conditions, the lower panels (c), (d) are swell-influenced conditions. The dimensionless representations aregiven on the left panels. The dimensional representations are given on the right panels for comparison.
Fig. 9. (a) Fetch-growth similarity laws of wind-generated waves expressed in terms of e∗ (s∗ ) (left-hand set) and e∗ (ω∗ ) (right-hand set), (b) s∗ (ω∗ ), and (c) s∗ (x∗ ).

Drag Parameters and Reference Wind Speed 409
need for caution in extending laboratory results to fieldconditions.
5.3 Steepness parameterSummarizing the comparisons shown in Figs. 4 to 6,
it is found that dynamic roughness normalization by rmswave height alone produces as good or even better per-formance than bi-variable normalization with rms waveheight and significant wave steepness. This is somewhatsurprising. It is possible that a consistent similarity re-quires satisfaction of the fetch limited growth condition.When the situation deviates from the fetch limited condi-tion, the influence on steepness is more severe than onthe wave frequency or wave variance. Therefore, formu-las produced by empirical fitting with imperfect datawould yield larger variations on the steepness parameter.An investigation is conducted on 12 different expressionsof the fetch limited growth functions reported by Kahmaand Calkoen (1992), Young (1999) and Hwang and Wang(2004). It is found that the discrepancies among differentfetch limited growth functions amplify significantly whenthey are expressed in terms of s∗ . Figure 9(a) presents thesummary result of the investigation, illustrating theconsistency of fetch limited growth functions presentedin terms of e∗ (ω∗ ) in comparison with the volatility of thesame functions presented in terms of e∗ (s∗ ). In particular,if fetch-dependent growth rate is considered, the signifi-cant slope parameter is not a monotonic function of thedimensionless fetch or frequency (Figs. 9(b) and (c)). Thesensitive characteristic and nonmonotonic properties ofs∗ are possibly the main reason that bi-variable normali-zation using both wave height and steepness parametersis less robust than the single-variable normalizations us-ing rms wave height or wavelength for the dynamic rough-ness.
6. Summary and ConclusionsWave-induced dynamic influences on the fluids
above and below interfacial waves decay exponentiallywith distance from the interface. The decay rate is in-versely proportional to the wavelength. It is well estab-lished in physical oceanography that wavelength servesas the primary length scale for studying the dynamics ofwave impacts through the water column. The wave im-pacts on the fluid above the interface (the atmosphere)are expected to mirror the wave dynamics underwater. Itis logical to consider that the vertical elevation in atmos-pheric measurements influenced by surface waves shouldscale with the characteristic wavelength of the surfaceundulations. In this paper, the properties of the drag co-efficient and dynamic roughness are investigated for bothcases that the vertical scaling length is represented bythe surface wavelength and by a fixed distance (10 mheight). Results using a fixed scaling length are not ex-
pected to collapse data in an orderly manner amenable tointerpretation. They can also mislead if dimensionallyinconsistent functions are used (e.g., compare Figs. 2(b)and (c)). The influence of wavelength on the magnitudeof C10 is considerable. This result is substantiated by windstress data collected under fetch limited conditions (Fig.3).
Direct wind stress measurements show that the dy-namic roughness of the ocean surface represented by aconstant Charnock parameter is insufficient and the for-mulation of the dimensionless roughness needs to includewave properties explicitly. Several different functionshave been proposed (9)–(11). As suggested by Donelan(1990), at the present stage, a consistent parameterizationof dynamic roughness can only be expected in fetch lim-ited wind-generated wave conditions. Applying the fetchlimited growth laws, (9) to (11) are recast into theirequivalent forms of z0∗ (ω∗ ) as (22) to (24). Taking intoconsideration that the rate of wave development varieswith wave age, thus that the exponent of the fetch lawe∗ (ω∗ ) varies with ω∗ , it is shown that z0∗ (ω∗ ) is expectedto have a positive slope for ω∗ < ~2 and a negative slopefor ω∗ > ~2. Such behavior is evident in the data assem-bled by Toba et al. (1990) and Donelan et al. (1993) (Figs.5 and 6). Finally, the significant slope, s∗ , is a very sensi-tive property of the ocean surface waves. Parameterizationof the dynamic roughness including the steepness param-eter may limit its range of applicability. Unwanted re-sults may occur when the fitted functions are applied todata outside the parameter range of the original datasource.
AcknowledgementsThis work is sponsored by the Office of Naval Re-
search (Naval Research Laboratory Program ElementsPE61153N and PE62435N). Nancy Mangin assisted in thedata digitization and manuscript preparation. (U.S. Na-val Research Laboratory Contribution JA/7330-04-0013.)
Appendix A. Fetch Limited Growth LawsHwang and Wang (2004) present an analysis of fetch
and duration growth functions. The results relevant to thepresent study are summarized here. Figure A1(a) showthe scatter plots of ω∗ (x∗ ) and e∗ (x∗ ) of the combined datafrom five field experiments (Burling, 1959; Hasselmannet al., 1973; Donelan et al., 1985; Dobson et al., 1989;Babanin and Soloviev, 1998). The results can be reason-ably well represented by simple power-law functions forthe fetch range ~102 < x∗ < ~104. For a broader rangecoverage, the development rate is clearly not a constant.The variable development rate can be obtained from databy using a second order polynomial function in log-logscales. Let
Y = lny, and X = lnx, (A1)

410 P. A. Hwang
where x and y can be either e∗ , ω∗ or x∗ , the polynomial
Y Xnn
n
N
= ( )=∑α
0
A2
is identically
y e xn
n
n
Nx
= ( )( )∑ −
=α α0
1
1ln
. A3
For N = 1,
y e x A xyxayx= = ( )α α0 1 1
1 . A4
For N = 2,
y e x A xxyx
ayx= = ′ ( )+ ′α α α0 1 2 22
ln . A5
Note that a′yx2 is not the local slope of y(x) for N = 2. Thelocal slope should be evaluated by
ax
y
dy
dxyx = ( ), A6
which yields
a xyx2 1 22= + ( )α α ln . A7
The local coefficient Ayx2 of y(x) = Ayx2 xayx 2 can be
obtained from (A5) and (A7),
A e xyxx
20 2= ( )−α α ln . A8
The assembled data are used to obtain coefficientsAyx1, ayx1, Ayx2 and ayx2 (in terms of α i) for the functionse∗ (x∗ ), ω∗ (x∗ ) and e∗ (ω∗ ). The data and fitted curves areshown in Fig. A1 and the fitting coefficients are listed inTable A1. Figure A2 plots Ayx2 and ayx2 for the functionse∗ (x∗ ), ω∗ (x∗ ) and e∗ (ω∗ ).
For the purpose of presenting the coefficient A andexponent a in terms of ω∗ using the fitting coefficients
101
102
103
104
105
10−5
10−4
10−3
10−2
10−1
100
101
x*
e *
ω*
(a)
0.5 0.7 1 2 3 4 5 6
10−5
10−4
10−3
10−2
ω*
e *
(b)
Fetch−limited dataDuration−limited data1st order2nd order
100
101
10−8
10−6
10−4
10−2
100
102
ω*
Aeω
, Aω
x, Aex
(a)
Aωx
Aex
Aeω
100
101
−5
−4
−3
−2
−1
0
1
2
ω*
a eω, a
ωx, a
ex
(b)
aωx
aex
aeω
Fig. A1. Fetch limited growth functions in terms of (a) ω∗ (x∗ ) and e∗ (x∗ ), and (b) e∗ (ω∗ ). The first and second order fitted curvesare also shown (Hwang and Wang, 2004).
Fig. A2. Local parameters of the fetch limited growth laws,(a) coefficients Aex, Aωx, Aeω, and (b) exponents aex, aωx andaeω.

Drag Parameters and Reference Wind Speed 411
Fig. B1. Probability density distribution of the ratio of com-puted and measured wind stress, R = u2
∗ c/u2
∗ m, obtained bydifferent expressions of the drag coefficient. (a) Cλ /2parameterizations, (b) C10 parameterizations (Hwang, 2005).
for e∗ (x∗ ) and ω∗ (x∗ ), it is necessary to develop an ex-pression of x∗ (ω∗ ). Expressing
ω∗ ∗+= ( )∗e xb b b x0 1 2 ln , A9
which is a quadratic equation of lnω∗ in terms of lnx∗ , x∗can be written as
xb b b b
b∗∗=
− − − −( )
( )exp
ln.
1 12
2 0
2
4
2
ωA10
Appendix B. Practical Issues of Wavelength ScalingThe practical aspect of the wavelength scaling for
the drag coefficient and dynamic roughness of the oceansurface is addressed by Hwang (2005). A brief summaryis presented here. As shown in Fig. 3(a), the drag coeffi-cient referenced to Uλ/2 can be expressed as a simple func-
tion of ωpu∗ /g (26). For many practical applications u∗ isnot available. A different parameterization function ofCλ/2 based on U10 and suitable wave parameters needs tobe developed. Empirically, from experimenting with dif-ferent dimensionless parameters, it is found thatCλ/2(ωpU10/g) or Cλ/2(U10/cp) represents a fair alternativeto Cλ/2(ωpu∗ /g). The fitting coefficients and statistics ofthe correlation coefficient and rms difference for six dif-ferent parameterization schemes examined by Hwang(2005) are summarized in the following equation
C
U
gQ S
U
cQ S
U
gQ S
p
p
p
λ
λ
ω
ω
/
.
.
/.
. , . , . ,
. , . , . ,
. , . ,
2
3 100 815
3 10
0 825
3 20 989
1 289 10 0 89 0 024
1 145 10 0 89 0 025
1 163 10 0 88
=
×
= =
( )
×
= =
( )
×
= =
−
−
−
B1a
B1b
00 025
1 039 10 0 85 0 028
1 220 10 0 95 0 017
1 086 10 0 94
3 2
0 947
20 704
2
0 696
. ,
. , . , . ,
. , . , . ,
. , . ,
/
.
.
.
B1c
B1d
B1e
( )
×
= =
( )
×
= =
( )
×
=
−
− ∗
− ∗
U
cQ S
u
gQ S
u
cQ
p
p
p
λ
ω
. .S =
( )
0 019
B1f
First order Second order
α 0 α 1 α 0 α 1 α 2
ω∗ (x ∗ ) 2.4732 –0.2368 3.0377 –0.3990 0.0110
e∗ (x ∗ ) –14.2950 0.8106 –17.6158 1.7645 –0.0647
e∗ (ω∗ )# –5.8936 –3.3341 –6.1384 –2.4019 –0.6102
Table A1. Polynomial fitting coefficients for data presented in Fig. A1.
#Note the coefficients for e∗ (ω∗ ) from least-square fitting as tabulated here are slightly different from those computed fromthe coefficients of e∗ (x*) and ω∗ (x*) (Hwang and Wang, 2004), the latter are used in Fig. A2.
0 0.5 1 1.5 2 2.50
0.5
1
1.5
2
2.5
3
u*2c/u
*2m
(a)C
λ/2(ω
pu
*/g )
Cλ/2
(ωpU
10/g)
Cλ/2
(U10
/cp)
0 0.5 1 1.5 2 2.50
0.5
1
1.5
2
2.5
3
u*2
c/u
*2m
(b)C
10(U
10/c
p)
C10
(U10
)C
10G(u
*/c
p)
C10TY
(U10
)

412 P. A. Hwang
A comparison is carried out to quantify the differ-ence in wind stress computation using several differentparameterization functions of the drag coefficient in termsof Cλ/2 and C10. The datasets used in that comparison studyinclude fetch-limited wind seas and swell-influencedmixed seas. Detailed tabulated statistics and graphs ofcomparison for different expressions of the drag coeffi-cient are provided. An example of the comparison isshown in Fig. B1, illustrating convincingly that windstress computed with Cλ/2 functions is more accurate thanthat computed with C10 functions. At this stage, the waveinformation in addition to U10 input is needed. In futuredevelopment, the fetch- or duration-limited growth lawsmay be used to further reduce the number of external pa-rameters required for wind-sea dominant conditions. Thispaper represents an effort toward achieving that goal. Withswell influence, it is expected that the relation will beconsiderably more complicated. It is therefore quite criti-cal to have a firm grasp of the baseline case of wind-seadominant conditions. The development so far shows theadvantage of Cλ/2 over C10 for representing the drag co-efficient of the ocean surface under windsea dominatedconditions.
ReferencesAnctil, F. and M. A. Donelan (1996): Air-water momentum flux
observed over shoaling waves. J. Phys. Oceanogr., 26,1344–1353.
Babanin, A. V. and Y. P. Soloviev (1998): Field investigationof transformation of the wind wave frequency spectrum withfetch and the stage of development. J. Phys. Oceanogr., 28,563–576.
Banner, M. L. and W. K. Melville (1976): On the separation ofair flow over water waves. J. Fluid Mech., 77, 825–842.
Burling, R. W. (1959): The spectrum of waves at short fetches.Dtsch. Hydrogr. Z., 12, 96–117.
Charnock, H. (1955): Wind stress on a water surface. Quart. J.Roy. Meteorol. Soc., 81, 639.
Dobson, F., W. Perrie and B. Toulany (1989): On the deep-wa-ter fetch laws for wind-generated surface gravity waves.Atmos.-Ocean, 27, 210–236.
Donelan, M. A. (1979): On the fraction of wind momentumretained by waves. p. 141–159. In Marine Forecasting, ed.by J. C. J. Nihoul, Elsevier.
Donelan, M. A. (1990): Air-sea interaction. p. 239–292. In TheSea—Volume 9: Ocean Engineering Science, ed. by B.LeMehaute and D. M. Hanes, Wiley Interscience.
Donelan, M. A., J. Hamilton and W. H. Hui (1985): Directionalspectra of wind-generated waves. Phil. Trans. Roy. Soc.Lond., A315, 509–562.
Donelan, M. A., F. W. Dobson, S. D. Smith and R. J. Anderson(1993): On the dependence of sea surface roughness on wavedevelopment. J. Phys. Oceanogr., 23, 2143–2149.
Hasselmann, K. et al. (1973): Measurements of wind-wavegrowth and swell decay during the Joint North Sea WaveProject (JONSWAP). Dtsch. Hydrogr. Z., Suppl. A, 8, 12,95 pp.
Hwang, P. A. (2004): Influence of wavelength on theparameterization of drag coefficient and surface roughness.J. Oceanogr., 60, 835–841.
Hwang, P. A. (2005): Comparison of the ocean surface windstress computed with different parameterization functionsof the drag coefficient. J. Oceanogr., 61, 91–107.
Hwang, P. A. and D. W. Wang (2004): Field measurements ofduration limited growth of wind-generated ocean surfacewaves at young stage of development. J. Phys. Oceanogr.,34, 2316–2326. (Corrigendum, 35, 268–270, 2005.)
Janssen, J. A. M. (1997): Does wind stress depend on sea-stateor not?—A statistical error analysis of HEXMAX data.Bound.-Layer Meteorol., 83, 479–503.
Jones, I. S. F. and Y. Toba (eds.) (2001): Wind Stress over theOcean. Cambridge Univ. Press, 307 pp.
Kahma, K. K. and C. J. Calkoen (1992): Reconciling discrep-ancies in the observed growth of wind-generated waves. J.Phys. Oceanogr., 22, 1389–1405.
Kawai, S. (1982): Structure of air flow separation over windwave crests. Bound.-Layer Meteorol., 23, 503–521.
Kawai, S., K. Okada and Y. Toba (1977): Support of the 3/2-power law and the gu∗ σ–4-spectral form for growing windwaves with field observation data. J. Oceanogr. Soc. Ja-pan, 33, 137–150.
Keller, M. R., W. C. Keller and W. J. Plant (1992): A wave tankstudy of the dependence of X band cross sections on windspeed and water temperature. J. Geophys. Res., 97, 5771–5792.
Kitaigorodskii, S. A. (1973): The Physics of Air-Sea Interac-tion. Israel Program for Scientific Translations, Jerusalem(English translation), 237 pp.
Kitaigorodskii, S. A. and Y. A. Volkov (1965): On the rough-ness parameter of the sea surface and the calculation ofmomentum flux in the near surface layer of the atmosphere.Izv., Atmos. Oceanic Phys., 1, 973–988.
Makin, V. K. (2003): A note on a parameterization of the seadrag. Bound.-Layer Meteorol., 106, 593–600.
Makin, V. K. and V. N. Kudryavtsev (1999): Coupled sea sur-face-atmosphere model. 1. Wind over waves coupling. J.Geophys. Res., 104, 7613–7623.
Makin, V. K. and V. N. Kudryavtsev (2002): Impact of domi-nant waves on sea drag. Bound.-Layer Meteorol., 103, 83–99.
Merzi, N. and W. H. Graf (1985): Evaluation of the drag coef-ficient considering the effects of mobility of the roughnesselements. Ann. Geophys., 3, 473–478.
Miles, J. W. (1957): On the generation of surface waves by shearflow. J. Fluid Mech., 3, 185–204.
Oost, W. A., G. J. Komen, C. M. J. Jacobs and C. Van Oort(2002): New evidence for a relation between wind stressand wave age from measurements during ASGAMAGE.Bound.-Layer Meteorol., 103, 409–438.
Phillips, O. M. (1977): The Dynamics of the Upper Ocean.Cambridge Univ. Press, Cambridge, U.K., 336 pp.
Schlichting, H. (1968): Boundary-Layer Theory, translated byJ. Kestin. McGraw-Hill Book Co., New York, 748 pp.
Smith, S. D., R. J. Anderson, W. A. Oost, C. Kraan, N. Maat, J.DeCosmo, K. B. Katsaros, K. L. Davidson, K. Bumke, L.Hasse and H. M. Chadwick (1992): Sea surface wind stress

Drag Parameters and Reference Wind Speed 413
and drag coefficients: The HEXOS results. Bound.-LayerMeteorol., 60, 109–142.
Stewart, R. W. (1974): The air-sea momentum exchange.Bound.-Layer Meteorol., 6, 151–167.
Taylor, P. K. and M. J. Yelland (2001): The dependence of seasurface roughness on the height and steepness of the waves.J. Phys. Oceanogr., 31, 572–590.
Toba, Y., N. Iida, H. Kawamura, N. Ebuchi and I. S. F. Jones(1990): Wave dependence of sea-surface wind stress. J.
Phys. Oceanogr., 20, 705–721.Ueno, K. and M. Deushi (2003): A new empirical formula for
the aerodynamic roughness of water surface waves. J.Oceanogr., 59, 819–831.
Volkov, Y. (2001): The dependence on wave age. p. 206–217.In Wind Stress over the Ocean, ed. by I. S. F. Jones and Y.Toba, Cambridge Univ. Press, New York.
Young, I. R. (1999): Wind Generated Ocean Waves. Elsevier,Amsterdam, the Netherlands, 288 pp.




![The Navier wall law at a boundary with random roughness · 2017-03-01 · arXiv:0711.3610v1 [math.AP] 22 Nov 2007 The Navier wall law at a boundary with random roughness David G´erard-Varet](https://static.fdocument.org/doc/165x107/5eb9bde442992d36c26b76b7/the-navier-wall-law-at-a-boundary-with-random-roughness-2017-03-01-arxiv07113610v1.jpg)