Doç. Dr. Rahmi GÜÇLÜ, Makine Dinami i Ders Notları …guclu/DengelemeRG.pdf · DENGELEME 1.)...
29
Doç. Dr. Rahmi GÜÇLÜ, Makine Dinamiği Ders Notları 1 m=sistemin kütlesi o m Fdin kama yuvası ρ 2) 1) ρ m k G Rijit d st = 0 ≡ Kons. el. m k: dengesizli ğ i olu ş turan kütle (kama yuvasının a ğ ırlı ğ ı) n F din =m kρω ² Elastik d st ≠ 0 DENGELEME 1.) Kütle dengelemesi (Rotor) 2.) Periyodik çevrimli makinaların dengelenmesi (Krank-Biyel) 3.) Güç dengelenmesi (Volan) 1.) Kütle Dengelenmesi : Makine mühendisliğinde bütün dönen makine parçalarının adına rotor denilmektedir. Örneğin; miller, dişli çarklar, kasnaklar vs. Bütün bu elemanların dönme ekseni ile ağırlık merkezinden geçen eksenin çakışması gerekir. Aksi takdirde dönme hızları arttıkça kütle atalet kuvvetleri (merkezkaç kuvvetleri, santrifüj kuvvetleri) ve bunların meydana getirecekleri eğilme momentleri ile dönme momentleri konstrüksiyon için büyük problemler oluştururlar. Bundan dolayı, rotorların dönme ekseni ile ağırlık merkezinden geçen eksenin çakışmasını sağlayabilmek için kütle atalet kuvvetlerinin dengelenmesi gerekmektedir. Rotorlar iki sınıfa ayrılır : 1.) Rijit Rotor : Dönme hareketi esnasında hiçbir deformasyon yapmadığı kabul edilir. 2.) Elastik Rotor : Dönme hareketi esnasında azda olsa üzerinde deformasyonların oluştuğu kabul edilen rotor. 2 din k F m = ρω Eksen kaçıklığı
Transcript of Doç. Dr. Rahmi GÜÇLÜ, Makine Dinami i Ders Notları …guclu/DengelemeRG.pdf · DENGELEME 1.)...

Doç. Dr. Rahmi GÜÇLÜ, Makine Dinamiği Ders Notları
1
m=sistemin kütlesi
om
Fdin
kama yuvası
ρ
2)
1) ρmk
G
Rijit dst=0
≡
Kons. el.
mk:dengesizliği oluşturan kütle (kama yuvasının ağırlığı)
n
Fdin=mkρω²
Elastik dst≠0
DENGELEME 1.) Kütle dengelemesi (Rotor) 2.) Periyodik çevrimli makinaların dengelenmesi (Krank-Biyel) 3.) Güç dengelenmesi (Volan)
1.) Kütle Dengelenmesi : Makine mühendisliğinde bütün dönen makine parçalarının adına rotor denilmektedir. Örneğin; miller, dişli çarklar, kasnaklar vs. Bütün bu elemanların dönme ekseni ile ağırlık merkezinden geçen eksenin çakışması gerekir. Aksi takdirde dönme hızları arttıkça kütle atalet kuvvetleri (merkezkaç kuvvetleri, santrifüj kuvvetleri) ve bunların meydana getirecekleri eğilme momentleri ile dönme momentleri konstrüksiyon için büyük problemler oluştururlar. Bundan dolayı, rotorların dönme ekseni ile ağırlık merkezinden geçen eksenin çakışmasını sağlayabilmek için kütle atalet kuvvetlerinin dengelenmesi gerekmektedir. Rotorlar iki sınıfa ayrılır : 1.) Rijit Rotor : Dönme hareketi esnasında hiçbir deformasyon yapmadığı kabul edilir. 2.) Elastik Rotor : Dönme hareketi esnasında azda olsa üzerinde deformasyonların oluştuğu kabul edilen rotor.
2
din kF m= ρω Eksen kaçıklığı

Doç. Dr. Rahmi GÜÇLÜ, Makine Dinamiği Ders Notları
2
L1
Fdin=mkρω²
A
Fden=mdρdω²
L2
B
Fiziksel Model
kuvvet) (santrifüj .... 22 ωυρ emmFdin ==
==eρ eksen kaçıklığı
=ρ.m dengelenmemiş büyüklük
( ) snrad
30
.nπωυ ==
Ağırlık merkezi kaydığından dolayı bu rotor üzerinde dengesizlik meydana gelecektir. Dolayısıyla bu dengelenmemiş büyüklüğün bir dengeleme büyüklüğü ile dengelenmesi gerekmektedir.
=ddm ρ. dengeleme büyüklüğü
( ) ( ) ( ) ( )ddkddk
dindindendin
din
mmmm
BAFF
FBA
ρρωρωρ .. ....
0 22 =→=
==→=
=+
Pratikte dönen elemanların meydana getirdikleri kütle atalet kuvvetleri, yataklarda dinamik kuvvet olarak ortaya çıkacaktır. Bu durumda, yatak kuvvetlerini sıfır ( 0== dindin BA )
yapabildiğimiz takdirde ideal (en mükemmel) dengeleme yapılmış olacaktır.
0 0 == dindin BA
33ρm
22 ρm
11ρm
44 ρm
A B

Doç. Dr. Rahmi GÜÇLÜ, Makine Dinamiği Ders Notları
3
G
oρ
Rotorların dengelenmesi sonucunda dengeleyemediğimiz kalıcı artık kütle atalet kuvvetleri olacaktır. Bu durumda, standartlar atalet kuvvetlerinin doğurduğu titreşimlerin hızlarının sınırlarını belirlemiştir. Bu hız sınırı aşağıda verilmiştir.
Titreşim hızı ( ) ωρυ .mm/s . ==dt
dxe
Rotor Titreşim Hızı ( υ.e ) Otomobil tekerleği 40 mm/s Santrifüj pompa 6,5 mm/s Uçak tahrik sist. rotoru 2,5 mm /s Taşlama tezgahı mili 0,4 mm/s I.) Statik Dengeleme ( 0M ve0F ≠=∑ ∑ )
Dengelenmemiş ρ.m büyüklüğünü dengelemek için karşısına aynı doğrultuda ddm ρ.
dengeleme büyüklüğünü yerleştirmek ve böylece dengelemeyi gerçekleştirmek her zaman mümkün olmayabilir. (Örnek: Kam Mili)
νA
L1
Fden=mdρdν²I d1
Fdin=mρν²m
ρ
s
L2
md
ρdB A
me
L
B

Doç. Dr. Rahmi GÜÇLÜ, Makine Dinamiği Ders Notları
4
Adin=0
md
Bdin=0
∑
∑
==→≠
=→=
=→=
sFsFMM
mmmm
FFF
dendine
dddd
dendin
.. 0
.. ....
022 ρρυρυρ
2121
2
22121
...
...).().(
ll
sF
ll
smBA
smsFllBllAM
din
bindin
dindindine
+=
+==
==+=+=
υρ
υρ
Tek düzlemde dengeleme yapıldığından burada mükemmel dengeleme yapılamamıştır. Yalnız kuvvetler dengelenmiş olup momentler dengelenmemiştir. Dolayısıyla, 0 0 ≠≠ dindin BA dır.
Bu şekilde, ideal dengelemenin olmadığı duruma statik dengeleme denilir. II.) Dinamik Dengeleme : 0M ve0F ==∑ ∑
A) s=0 (Aynı düzlemde dengeleme)
dendd Fm =2ωρ
dinFm =2ρω
dd
dendin
dindin
mm
FF
MF
BA
ρρ =
=
==
==
∑ ∑ 0 , 0
0 , 0
B) s≠0 (Farklı düzlemde dengeleme - Kam mili mekanizması) Sistem, üzerinde bulunan kütlelerin durumuna göre 1 veya 2 dengeleme düzlemi ile
dengeleme yapılır.
(mdρd)1
Adin=0
(mdρd)2
a
s1
mρ
s2Bdin=0
b
d2d1
n

Doç. Dr. Rahmi GÜÇLÜ, Makine Dinamiği Ders Notları
5
∑ ∑ ==
==
0 , 0
0 , 0
MF
BA bindin
Dengeleme düzlemlerinin ( )21 ve dd yeri, 21 ve ss olarak seçilerek, ( ) ( )ıı1
. ve. dddd mm ρρ
dengeleme büyüklükleri hesaplanır.
( ) ( )
( ) ( ) bulunur. . 0)(.... 0
.... . . 0
ıı212
ıı2
11
22ıı
21
ddddd
dddd
mssmsmM
mmmF
ρωρωρ
ωρωρωρ
⇒=+−⇒=
=+⇒=
∑
∑
( ) ( )
ıı1 . . 0 dddd mmmF ρρρ −=⇒=∑ olarak hesaplanır.
Örnek:
G=100N n=1200 d/dak
a) Tekerlek üzerinde yataklara gelen dinamik kuvvetleri hesaplayınız? b) Bu sistemin dengelenmesini gerçekleştiriniz?
Çözüm:
a)
N 25,12072
N 5,2414
30
1200..10.15.
81,9
100
..2
3
2
===
=
=
=
−
din
dindin
din
din
din
FBA
F
F
mF
π
υρ
a=150mm
nA
e=15mm
b=150mm
1000mm
G
jant
o B
A
Fdin=mρν²
a
mρ
Bb

Doç. Dr. Rahmi GÜÇLÜ, Makine Dinamiği Ders Notları
6
1000mm
G
o
md
e
b) I-) İlave kütle koyarak dengeleme :
dendd Fm =2ωρ
dinFm =2ρω
kg 315,0
485,0.10.15.81,9
100 .. .... 322
=
=⇒=⇒= −
d
ddddd
m
mmemmem ρυρυ
Eksen kaçıklığının tam karşısına kg 315,0=dm değerinde bir dengeleyici kütle (kurşun)
konularak sistem dengelenmiş olur. II-) Kütle çıkararak dengeleme: Bu konstrüksiyonda kütle çıkarma sistemin mukavemetini azaltabilir. Ancak, aşağıda verilen bir konstrüksiyon tarzında kütle çıkarma mümkün olabilir.
R=
5m
bosaltilan kütle
Gρd
o

Doç. Dr. Rahmi GÜÇLÜ, Makine Dinamiği Ders Notları
7
(mdρd)
150
A
I
150 150
II
a
B
Örnek: Şekilde verilmiş dengelenmemiş kütlelerin iki düzlemde dengelenmesi istenmektedir.
a) Yatak kuvvetlerini bulunuz? b) Verilenlere göre dengeleme büyüklüğünü bulunuz? n= 900 d/dak
311 10.9 −=ρm
3
22 10.3 −=ρm Çözüm: a)
N 94,79
30
900..10.9
..
1
2
31
2111
=
=
=
−
din
din
din
F
F
mF
π
υρ
N 64,26
30
900..10.3
..
2
2
32
2222
=
=
=
−
din
din
din
F
F
mF
π
υρ
NBA
BA
mBmA
F
7,52
)30.(10.6
....
0
23
211
222
=−
=−
+=+
=
−
∑
π
υρυρ
NAA
NB
B
M A
44 7,52)68,8(
68,8
0450.300.64,26150.94,79
0
=⇒=−−
−=
=+−
=∑
b) I. çözüm : II. düzlem olarak, ( )22 ρm ’nin düzlemi ve dengeleme büyüklüğü seçilerek, I
düzleminin yeri ve dengeleme büyüklüğü bulunabilir. ( )
( )
mmaa
amamM
kgmm
mmmF
d
dd
dd
75 0)150.(10.310.9-
0)150(.....- 0
10.610.310.9.
... .. 0
33
222
2111
333ı
211
222
2ı
=⇒=++
=++⇒=
=−=
=+⇒=
−−
−−−
∑
∑
υρυρ
ρ
υρυρυρ

Doç. Dr. Rahmi GÜÇLÜ, Makine Dinamiği Ders Notları
8
II. çözüm : I ve II düzlemlerinin yeri seçilerek dengeleme büyüklükleri bulunur.
( ) ( )
( ) ( )
( )
( )
( ) ( ) 10.5,510.5,010.6. 10.5,0.
0.350.250.10.3100.10.9-
0350..250..100..- 0
10.610.310.9..
..... .. 0
33311
322
2233
2222111
333ıı22ı11
211
2ıı22
222
2ı11
kgmmkgmm
m
mmmM
kgmmm
mmmmF
ıddııdd
dd
ddd
dddd
dddd
−−−−
−−
−−−
=−==
=++
=++⇒=
=−=+
=++⇒=
∑
∑
ρρ
ρ
ρρρ
ρρ
υρυρυρυρ
(mdρd)Ι
100Adin=0 50
I
m2ρ2
150
m1ρ1
(mdρd)ΙΙ
50100
II
Bdin=0

Doç. Dr. Rahmi GÜÇLÜ, Makine Dinamiği Ders Notları
9
Farklı Düzlemlerdeki Kütlelerin Dengelenmesi: Şekil 1)
Şekil 2)
Şekil 3)
A
dΙ
a
I
Zm2ρ2
önden
m1ρ1
b
dΙΙ
II
XBY
A
dΙ
X
Y
IZ
m2ρ2
B
m1ρ1 m3ρ3
α3
dΙΙ m2ρ2
Y
α2
α1
m3ρ3II
Z
(referans ekseni)X
m1ρ1
dΙ
A
dΙΙ
Im1ρ1 m2ρ2 II
m3ρ3
B
m2ρ2
m1ρ1
Ysoldan
Z
X

Doç. Dr. Rahmi GÜÇLÜ, Makine Dinamiği Ders Notları
10
Şekil 4) Şekil 5)
(mρ)z
Y
A
mρ
B(mρ)y
(mρ)x
β
α
Z
mρ
X
A
D1 D2
B
D1
Z
X
D2
Z
X

Doç. Dr. Rahmi GÜÇLÜ, Makine Dinamiği Ders Notları
11
Dinamik Dengeleme İşlemi:
0
0
=
=
din
din
B
A
0
0
=Σ
=Σ
M
Fdin
1-) En genel durumda matematik olarak dengelemeyi yapabilmek için mil üzerinde
dengelenmemiş kütlelerin bulunduğu bölge dışında iki dengeleme düzlemi seçilir.
2-) Seçilen dengeleme düzlemlerinin konstrüksiyon için uygun olup olmadığı araştırılır. Eğer,
kütlelerin bölgesi dışında dengeleme düzlemleri seçilmemesi gerekiyorsa konstrüksiyona uygun
olacak tarzda ara yerde dengeleme düzlemleri seçilerek dengeleme gerçekleştirilir.
3-) Dengelenmemiş her kütle, bulundukları düzlemde ayrı ayrı I ve II no’lu dengeleme
düzlemleri kullanılarak dengelenir.
4-) Dengeleme düzlemlerinde ortaya çıkan dengeleme büyüklüklerinin bileşke vektörü ve açısı
bulunur. Yani, önce I no’lu dengeleme düzlemine konulan dengeleme büyüklüklerinin x ve z
yönündeki bileşenleri bulunur. Sonra bileşkesi alınarak bu düzleme konulması gereken bileşke
dengeleme büyüklüğü 22 )()()( IdzdzIdxdxIdd mmm ρρρ +=
bulunur. Bu büyüklüğün yeri de )/( IdIdI xFzFArctg=α
olarak hesaplanır. Aynı işlemler, II no’lu dengeleme düzleminde tekrar edilerek oradaki
22 )()()( IIdzdzIIdxdxIIdd mmm ρρρ +=
dengeleme büyüklüğü ve )/( IIdIIdII xFzFArctg=α
açısı hesaplanır.

Doç. Dr. Rahmi GÜÇLÜ, Makine Dinamiği Ders Notları
12
a
A
I
B
b
II
BA
a b
I II
I
x
zII
z
x
a b
A B
I II z
x
y
x
z
Örnek:
11ρm 11ρm
22 ρm 22 ρm
Z ekseni X ekseni
11ρm
22 ρm
( )Idxdxm ρ ( )
IIdxdxm ρ
( )Idzdzm ρ ( )
IIdzdzm ρ ( )IdxF ( )
IIdxF
( )IdzF ( )
IIdzF
I nolu dengeleme düzlemi II nolu dengeleme düzlemi
( )Idxdxm ρ ( )
IIdxdxm ρ
1α 2α
( )Idzdzm ρ ( )
IIdzdzm ρ
( )Iddm ρ ( )
IIddm ρ

Doç. Dr. Rahmi GÜÇLÜ, Makine Dinamiği Ders Notları
13
I nolu dengeleme düzleminde oluşturulan dengeleme kuvveti. 22 )()()( IdxIdzId FFF +=
II nolu dengeleme düzleminde oluşturulan dengeleme kuvveti. 22 )()()( IIdxIIdzIId FFF +=
I nolu dengeleme düzlemindeki dengeleme büyüklüğü
22 )()()( IdzdzIdzdIdd mmm ρρρ +=
II nolu dengeleme düzlemindeki dengeleme büyüklüğü
22 )()()( IIdzdzIIdxdxIIdd mmm ρρρ +=
Idxdx
Idzdz
Id
IdI
m
mArctg
xF
zFArctg
)(
)(
)(
)(
ρ
ρα ==
IIdxdx
IIdzdz
IId
IIdII
m
mArctg
xF
zFArctg
)(
)(
)(
)(
ρ
ρα ==
Problem1
d/d 1500 m, 3.0 m, 2.0 kg, 1.5 kg, 3 kg, 0.5 kg, 1 214321 ======= nrrmmmm
a) Dengelenmemiş durumda, A ve B yatak kuvvetlerini bulunuz?
b) Bu sistemde ideal dengelemeyi gerçekleştirerek, I ve II nolu dengeleme düzlemlerine
konulacak dengeleme büyüklüklerini ve açılarını bulunuz?
nA 100 150 200 150 250
I IIz
m1
xB
D2D1
z
x
y
m2D1
r2
m2D2
m3
xr1

Doç. Dr. Rahmi GÜÇLÜ, Makine Dinamiği Ders Notları
14
Çözüm:
a)
kgmm
kgmm
Z
X
5.15.0360cos
6.2866.0330cos
33
33
=×==
=×==
rd/s 5030
1500.π
πν ==
D2 →Z ekseninde
05.15.134 =−=− Zmm
Z Ekseni X Ekseni
NrmBA ZZ 4.2467212 ==+ ν ∑ =+−→= 06002500 2
12 zz BrmMA ν
NBz 1028600
250.616850== NAz 3.1439=
2
112
23 νν rmBrmA xxx +=+ 8.49347.19245 +=+ xx BA
NAB xx 8.14310=− ∑ =+−→= 06004502500 223
211 xxx BrmrmMA νν
NBx 13.12378600
8.7426877== NAx 77.1932−=
NAAAZX 8.240922
=+=
NBBB ZX 74.1242022=+=
m3x
m4
z
m3zm3
x
Az Bz
m2
350 250250 r1
Ax
m3x
Bx
m1
r1
200 150 250250 r2

Doç. Dr. Rahmi GÜÇLÜ, Makine Dinamiği Ders Notları
15
b)
Z Ekseni X Ekseni
Z Ekseni
∑ +=→= IIZIZz mmrmF )()(0 12 ρρ
IIZIZ mm )()(1.0 ρρ +=
∑ =+−→= 0750)(1500 12 IIZz mrmMI ρ
kgm 08.0)(m
kgm 02.0)(
IZ =
=
ρ
ρ IIZm
X Ekseni
∑ =++→= 2311 .)()(0 rmmrmmF XIIXIXX ρρ
58.0)()(
78.0)(2,0)(
=+
=++
IIXIX
IIXIX
mm
mm
ρρ
ρρ
0750)(350150.0 2311 =+−→=∑ IIXXX mrmrmMI ρ
kgm 256.0)(m
kgm 323,0)(
IX =
=
ρ
ρ IIXm
I nolu dengeleme düzlemi
kgm 268.0)()()( 22=+= IZIXI mmm ρρρ
o
IX
IZI
m
mArctg 35.17
)(
)(==
ρ
ρα 3. Bölgede
ooo
I 35.19735.17180 =+=α
2.)( ϖρ IdenI mF =
NFdenI 93.6605=

Doç. Dr. Rahmi GÜÇLÜ, Makine Dinamiği Ders Notları
16
z
x
I II
x
z
II nolu dengeleme düzlemi
kgm 324.0)()()( 22=+= IIZIIXII mmm ρρρ
o
IIX
IIZII
m
mArctg 53.3
)(
)(==
ρ
ρα 3. Bölgede
ooo
II 53.18353.3180 =+=α
2.)( ϖρ IIdenII mF =
8001=denIIF N
( ) 256,0=Ix
mρ ( ) 323,0=IIx
mρ
1α 11α
( ) 08,0=Iz
mρ ( ) 02,0=IIz
mρ
( ) 268,0=I
mρ ( ) 324,0=II
mρ

Doç. Dr. Rahmi GÜÇLÜ, Makine Dinamiği Ders Notları
17
n100A 150
I
200 150250
II
100B
z
x
Problem 2:
( )2ρm ( )3ρm ( )2ρm ( )3ρm
( )1ρm ( )1ρm
d/d 1200 kgm, 4.1 kgm, 0.8 kgm, 2.1 332211 ==== nmmm ρρρ
a) A ve B yatak kuvvetlerini bulunuz?
b) Tam dengelemeyi gerçekleştiriniz? (Dengeleme büyüklüklerini ve açılarını bulunuz?)
Çözüm:
a)
7.0 ,69.0 ,848.0
40 ,21.1 ,4.0 ,848.0
332211
332211
===
====
ZZZ
XX
mmm
mmmX
ρρρ
πνρρρ
X Ekseni Z Ekseni
∑ = 0XF
XXXXX BmmmA ++=+ 222
211
233 νρνρνρ
NBA XX 600)40(038.0 2 ==− π

Doç. Dr. Rahmi GÜÇLÜ, Makine Dinamiği Ders Notları
18
∑ = 0XMA
0950850500150 233
222
211 =+−+ XXXX Bmmm νρνρνρ
NA
NB
X
X
35.12257
35.11657
=
=
∑ = 0ZF
ZZZZZ BmmmA ++=+ 222
211
233 νρνρνρ
NAB ZZ 9.9558)40(542.0 2 ==− π
∑ = 0ZMA
0950850500150 233
222
211 =+−+ ZZZZ Bmmm νρνρνρ
NA
NB
Z
Z
56.4951
76.13510
=
=
NAAAZX 8.1321922
=+= NBBB ZX 73.1784422=+=
b) X Ekseni Z Ekseni
∑ = 0XF
IIXXXXIX mmmmm )()( 221133 ρρρρρ ++=+
038.0)()( =− IIXIX mm ρρ
∑ = 0XMI
0600450)(250100 332211 =−++− XIIZXX mmmm ρρρρ
kgm 617.1)(
kgm 58.1)(
=
=
IX
IIX
m
m
ρ
ρ

Doç. Dr. Rahmi GÜÇLÜ, Makine Dinamiği Ders Notları
19
∑ = 0ZF
ZZIZIIZIZ mmmmm 33221 )()( ρρρρρ ++=+
542.0)()( =− IZIIZ mm ρρ
∑ = 0ZMI
0600450)(250100 332211 =−++− ZIIZZZ mmmm ρρρρ
kgm 963.0)(
kgm 5.1)(
=
=
IZ
IIZ
m
m
ρ
ρ
I nolu dengeleme düzlemi
kgm 882.1)()()( 22=+= IZIXI mmm ρρρ
o
IX
IZI
m
mArctg 77.30
)(
)(==
ρ
ρα 1. Bölge
II nolu dengeleme düzlemi
kgm 178.2)()()( 22=+= IIZIIXII mmm ρρρ
o
IIX
IIZII
m
mArctg 5.43
)(
)(==
ρ
ρα 3. Bölge
ooo
II 5.2235.43180 =+=α

Doç. Dr. Rahmi GÜÇLÜ, Makine Dinamiği Ders Notları
20
Problem 3:
n=1848 dev/dak
a) Dinamik yatak kuvvetlerini hesaplayınız?
b) Bu sistemi dinamik olarak dengeleyiniz?
KRANK - BİYEL MEKANİZMASININ DENGELENMESİ
Peryodik çevrimli makinelerin en basiti olmak üzere tek silindirli bir motorun dengelenmesi ele
alınacaktır. Çünkü, böyle bir sistem mühendislik açısından motorların kullanıldığı her durumda
karşımıza çıkan bir problem olup, mutlaka dengelenmesi gerekmektedir. Çünkü, gerek gaz
kuvvetleri gerekse gidip gelen ve dönen parçaların bulunması sistem üzerinde dengelenmemiş
kütle ve kuvvetleri doğuracaktır.
Y
X
Z

Doç. Dr. Rahmi GÜÇLÜ, Makine Dinamiği Ders Notları
21
Ao
A
B
1 2
Lr
G1 G2
krank
biyel
ϕpiston
Ao
Ao
AL B
Piston
Biyel
Krank
mb
mb
r
ψ
Krank biyel mekanizmalarında gaz kuvvetleri oluşurken dönen ve gidip gelen kütleler ise atalet
kuvvetlerini oluştururlar. Bu sistemin dengelenebilmesi için ana yataklara intikal eden atalet
kuvvetlerinin sıfır veya sıfıra yakın bir değerde olması gerekmektedir. Bunun için kinetik analiz
yapılarak hız ve ivme değerleri bulunur. Daha sonra dinamik analiz için kütle atalet kuvvetleri
dengeleme büyüklükleri, yatak büyüklükleri hesaplanır. Kütle atalet kuvvetleri bulunarak
bunların dengelenmesi yapılacaktır. Biyel kütlesi iki parçaya ayrılır ve bunlar A ve B
noktalarına indirgenir. Aynı şekilde, krank kütlesi de iki parçaya ayrılarak, A ve A0 noktalarına
indirgenebilir.

Doç. Dr. Rahmi GÜÇLÜ, Makine Dinamiği Ders Notları
22
Ao ϕ=ωt
r
piston
A
1 2biyelL
B
krankmp
mö
xmb
ϕ
H
y
md
xψ
G1 G2
1G ( Krankın ağırlık merkezi)
2G ( Biyelin ağırlık merkezi)
İ2=AG2.G2B (Biyel atalet yarıçapı)
İ2=A0G1.G1A (Krank atalet yarıçapı)
ϕω sin... 2rmd 2.. ωrmd
ϕω cos... 2rmd
md = dönen kütle (krank miline indirgenmiş kütle)
mö = ötelenen kütle (piston miline indirgenmiş kütle)
mp = piston kütlesi
mA(1)
= (1) nolu krank elemanından A’ya indirgenen kütle
mA(2)
= (2) nolu biyel elemanından A’ya indirgenen kütle
mB(2)
= (2) nolu biyel elemanından B’ye indirgenen kütle
2
)2(
)2()1(
)sin(1cossinsin
sin.sin.
/sin ve/sin
cos.cos.
..
ϕψϕψ
ψϕ
ψϕ
ψϕ
L
r
L
r
LrAH
LAHrAH
Lrx
BHHAx
mmm
mmm
o
Bpö
AAd
−=→=
==
==
+=
+=
+=
+=

Doç. Dr. Rahmi GÜÇLÜ, Makine Dinamiği Ders Notları
23
r/L<1 olmak üzere Binom açılımı uygulanacak olursa;
)sin2
11( cos.
.....sin2
11sin1
2
2
2
2
2
22/1
2
2
2
ϕϕ
ϕϕ
L
rLrx
L
r
L
r
−+=
+−=
−
x=xB pistonun hareketi olduğuna göre pistonun hızı ;
)2sin2
1(sin
cos.sin22sin ve
cos.sin2
12sin.
2
ϕϕ
ϕϕϕϕ
ϕϕϕ
ϕϕ
L
rrwv
wdt
d
dt
d
L
r
dt
dr
dt
dxv
B
B
+−=
==
−−==
Ba (B noktasının ivmesi)
)2cos(cosa Bdt
d
L
r
dt
drw
dt
dvB ϕϕ
ϕϕ +−==
)2cos(cos2 ϕϕL
rrwaB +−=
Pistondaki kütle mö=mp+mB(2) olduğuna göre atalet kuvveti (x doğrultusunda) hareketin ters
yönünde aşağıdaki formülden bulunur.
ϕϕ 2cos).(..cos... 2.
2
L
rwrmwrmamF ööböB +==
x yönündeki toplam atalet kuvveti Fx , y yönündeki atalet kuvveti Fy olmak üzere yataklara
gelen dinamik kuvvetler:
ydy
xöödx
AwrmF
AL
rwrmwrmmF
)(sin..
)(2cos)(..cos..).(
02
022
==
=++=
ϕ
ϕϕ
Herhangi bir t anında sistemde oluşan atalet kuvvetleri, bu şekilde yataklar vasıtasıyla sisteme
iletilmiş olur.

Doç. Dr. Rahmi GÜÇLÜ, Makine Dinamiği Ders Notları
24
mb
r
Ao
r'
md
II. mertebeden atalet kuvvetlerinin )2cos)(..( 2 ϕL
rwrmö ihmal edilmesi istendiği durumlarda
yataktaki bileşke dinamik kuvvet ( F∑ ),
[ ] 2/12222220 )sin..()cos..)(( ϕϕ wrmwrmmFyFxFA död ++=+=∑=
Dengeleme (Balans) Kütlesinin Değeri )( bm
Seçilecek mb (balans kütlesi) dengeleyici kütle, yerleştirileceği mesafe ve açısal konuma göre Fx
ve Fy dinamik kuvvetlerini belirli ölçüde etkileyecektir.
En genel halde, dengeleyici kütle mb ve 'r mesafesi ise:
ϕϕϕ
ϕϕ
cos'..2cos..cos..).(
sin'.sin..
222
2.
2
wrmL
rwrmwrmmFx
wrmwrmFy
bööd
bd
−++=
−=
çalışma şartlarına ve parametrelere göre '.rmb değeri tespit edilir.
1-) mb=md ve 'rr = olarak şekildeki konumda seçilsin
rmrm db ='.
düşeyde 0 .sin).w.r'm-.r( 2b == ϕdmFy
yatayda ϕϕϕϕ coscos2co .cos.. 2222.r'.wm..r.wms
L
rr.wmwrmFx bdöö −++=
)2cos(cos..
2cos....cos...
2
22
ϕϕ
ϕϕ
L
rwrmFx
L
rwrmwrmFx
ö
öö
+=
+=

Doç. Dr. Rahmi GÜÇLÜ, Makine Dinamiği Ders Notları
25
Görülüyor ki dengeleyici kütle olarak ilave edilen karşı ağırlık mb, düşey kuvveti yok ederken
yatay kuvveti de azaltır. Dengeleyici kuvvet arttıkça eksenel kuvvette azalır. Ancak, bu durumda
bu sefer düşey yöndeki Fy kuvvetinin değeri sıfır olmaz artar.
2-) mb = md + mö ve II. derece atalet kuvveti ihmal edilirse
yatayda Fx=0
düşeyde ϕϕϕ sin..sin.).(sin.. 222wrmwrmmwrmFy öödd −=+−=
3-) ,...)5
4,
3
2,
3
1,
2
1(,...)
5
3,
3
2,
3
1,
2
1( ödb mmm +=
Örnek :
Tek silindirli bir motorda;
ddn
mmL
mmr
kgm
kgm
kgm
krank
biyel
krank
krank
biyel
piston
2000
292
65
178,0
203,0
142,0
=
=
=
=
=
=
olduğuna göre:
a) Dengelenmemiş olan atalet kuvvetlerinin x,y eksenleri üzerindeki bileşenlerini krank
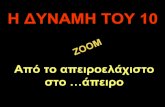
dönme açısı φ=0,90,180,270,360 derecelerde hesaplayınız ve grafiğini çiziniz?
b) 'rr = ve ödbalans mmm += konulduğu takdirde Fx ve Fy kuvvetlerini bularak,
grafiğini çiziniz?
c) 'rr = ve ödbalans mmm3
2+= konulduğu takdirde Fx ve Fy kuvvetlerini bularak,
grafiğini çiziniz?

Doç. Dr. Rahmi GÜÇLÜ, Makine Dinamiği Ders Notları
26
25mm
40mm
Ao
G1
krank
1
biyel
G2
2
170mm
122mm
mp=0.142 kg
)1(A )2(
A
)2(B
Krank ya da biyel üzerinde bir ağırlık merkezi verilmediği takdirde, kütle yarı yarıya alt ve üst
noktaya indirgenir.
a) ∑ = 0krankF
kgmkgm
mmm
mmm
AA
AAG
krankAA
109,0 068,0
25.40. 0
178,0
)1(
)1(
1
)1(
0
0
0
==
=⇒=
==+
∑
kgmkgm
mmm
mmm
F
BA
BAG
biyelBA
biyel
085,0 118,0
170.122. 0
203,0
0
)2()2(
)2()2(
2
)2()2(
==
=⇒=
==+
=
∑
∑
ϕω
ϕωϕω
ππω
sin...F
2cos)..(..cos..).(F
snrad 209,43
30
2000.
30
.n
226,0
227,0
2Y
22x
)2(
)2()1(
rm
L
rrmrmm
mkgmmm
mkgmmm
d
ööd
BBpö
AAAd
=
++=
===
==+=
==+=

Doç. Dr. Rahmi GÜÇLÜ, Makine Dinamiği Ders Notları
27
3
2
4
1
5 Fx
y
-143
647
1435
-647
-1148
1 2 3 4 5
φ 00 090 0180 0270 0360
Fx (N) 1435 -143 -1148 -143 1435
Fy (N) 0 647 0 -647 0
ΣF (N) 1435 662 1148 662 1435
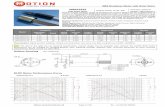
b)
'rr
mmm ödbalans
=
+=
ϕω
ϕωϕωϕω
2cos)..(..F
cos..).(2cos)..(..cos..).(F
2x
222x
L
rrm
rmmL
rrmrmm
ö
ödööd
=
+−++=
ϕωϕωϕω sin...sin..).(sin...F 222y rmrmmrm öödd −=+−=

Doç. Dr. Rahmi GÜÇLÜ, Makine Dinamiği Ders Notları
28
4
1,3,5 Fx
2
Fy
-143
644
-644
1 2 3 4 5
φ 00 090 0180 0270 0360
Fx (N) 143 -143 143 -143 143
Fy (N) 0 -644 0 644 0
ΣF (N) 143 660 143 660 143

Doç. Dr. Rahmi GÜÇLÜ, Makine Dinamiği Ders Notları
29
3
4
1
5
Fx
2
y
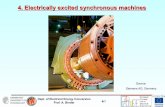
c)
'rr = ve ödbalans mmm3
2+=