Anna Divoli (Pingar Research) "How taxonomies and facets bring end-users closer to big data" TAW2012
Discrete Mumford-Shah Model: from Image toGraph Analysis
Nelly PustelnikCNRS, Laboratoire de Physique de l’ENS de Lyon
Graph signals : learning and optimization perspectivesMay, 2nd 2019
Context Mumford-Shah D-MS for images D-MS for graphs Conclusions
Motivation
Defi Imag’IN CNRS SIROCCO (2017-2018): Multiphasic flow experimentmodeling gas and liquid in a porous medium.
K
z = η1
z = η2
• Goal : classify gas/liquid + accurate estimation of the perimeter.• Datasize: Image composed with 2.107 pixels. Analysis to be
performed on a sequence of images.2/40
Context Mumford-Shah D-MS for images D-MS for graphs Conclusions
Motivation
Defi Infinity CNRS OptMatGeo (2018): vote transfer matrix estimationbetween two elections
• Goal : clustering the areas with similar transfer matrix (i.e. similarelectoral behaviour) + sharp transitions.
• Datasize: ∼ 2.1073/40
Context Mumford-Shah D-MS for images D-MS for graphs Conclusions
Motivation
K
z = η1
z = η2
• Structured data (e.g. images, graphs).• Clustering + accurate interface detection.• Difficulty to label data.• For Physics or societal applications, the truth is not as sharp as
clustering but it is closer from regression (smooth behaviour) andpossibly sharp transition.
• Huge amount of data.
Goal: Design algorithmic solutions with convergence guarantees to
extract piecewise smooth behaviour.4/40
Context Mumford-Shah D-MS for images D-MS for graphs Conclusions
Mumford-Shah (1989)
minimizeu,K
1
2
∫Ω
(u− z)2dxdy︸ ︷︷ ︸fidelity
+β
∫Ω\K|∇u|2dxdy︸ ︷︷ ︸
smoothness
+λH1(K ∩ Ω)︸ ︷︷ ︸length
• Ω: image domain,• z ∈ L∞(Ω): data,• u ∈W 1,2(Ω): piecewise smooth approximation of z,
W 1,2(Ω) ={u ∈ L2(Ω) ∂u ∈ L2(Ω)
}where ∂ weak derivative operator
• K : set of discontinuities,• H1: Hausdorff measure.
5/40
Context Mumford-Shah D-MS for images D-MS for graphs Conclusions
Discrete Mumford-Shah like models
minimizeu,K
12
∫Ω(u− z)
2dxdy + β∫
Ω\K |∇u|2dxdy + λH1(K ∩ Ω)
• Potts model (1952):[Rudin et al., 1992] [Cai, Steidl, 2013] [Storath, Weinmann, 2014]
minimizeu
1
2‖u− z‖22 + γ‖Du‖0
• Blake-Zisserman problem (1987):[Strekalovskiy, Cremers, 2014] [Hohm et al., 2015]
minimizeu
1
2‖u− z‖22 + γ
∑i
min(|(Du)i |p, αp)
• Ambrosio-Tortorelli (1990)[Foare et al., 2016]
minimizeu,e
1
2‖u− z‖22 + β‖(1− e)� Du‖2 + λ
(ε‖D̃e‖22 +
1
4ε‖e‖22
)6/40
Context Mumford-Shah D-MS for images D-MS for graphs Conclusions
Mumford-Shah like models: summary
Potts Blake-Zisserman Ambrosio-Tortorelli
Smooth estimate X V V
Data-term flexibility X X X
Convergence V X X
Large scale dataset V V X
Open contours X V V
⇒ Revisit Ambrosio-Tortorelli model in order to provide a large-scaleflexible convergent discrete MS like model .
7/40
Context Mumford-Shah D-MS for images D-MS for graphs Conclusions
Proposed Discrete Mumford-Shah like (D-MS) model
minimizeu,e
Ψ(u, e) := L(u; z) + β‖(1− e)� Du‖2 + λR(e)
• Ω = {1, . . . ,N1} × {1, . . . ,N2};• z ∈ R|Ω|: input data = image;• u ∈ R|Ω|: piecewise smooth approximation of z;• L: data fidelity term;• D ∈ R|E|×|Ω|: models a finite difference operator;• e ∈ R|E|: edges between nodes whose value is 1 when a contour
change is detected and 0 otherwise;• R: favors sparse solution (i.e.“short |K |”).
8/40
Context Mumford-Shah D-MS for images D-MS for graphs Conclusions
Proposed Discrete Mumford-Shah like (D-MS) model
minimizeu,e
Ψ(u, e) := L(u; z) + β‖(1− e)� Du‖2 + λR(e)
• Ω = {1, . . . ,N1} × {1, . . . ,N2};• z ∈ R|Ω|: input data = image;• u ∈ R|Ω|: piecewise smooth approximation of z;• L: data fidelity term;• D ∈ R|E|×|Ω|: models a finite difference operator;• e ∈ R|E|: edges between nodes whose value is 1 when a contour
change is detected and 0 otherwise;
• R: favors sparse solution (i.e.“short |K |”).
⇒ Identify the assumptions on L and R to design an algorithmicscheme with convergence guarantees (confidence in the solution).
8/40
Context Mumford-Shah D-MS for images D-MS for graphs Conclusions
D-MS: Gauss-Seidel iterations
minimizeu,e
Ψ(u, e) := L(u; z) + β‖(1− e)� Du‖2︸ ︷︷ ︸S(Du,e)
+λR(e)
• Gauss-Seidel scheme = coordinate descentSet e[0] ∈ R|E|.For k ∈ N⌊
u[k+1] ∈ arg minu Ψ(u, e[k])e[k+1] ∈ arg mine Ψ(u[k+1], e)
• Under technical assumptions, convergence of the sequence(u[k], e[k])`∈N to a critical point (u
∗, e∗) of Ψ.
Technical assumptions = minimum is attained at each iteration, e.g.by assuming strict convexity w.r.t one argument.
9/40
Context Mumford-Shah D-MS for images D-MS for graphs Conclusions
D-MS: Gauss-Seidel iterations
minimizeu,e
Ψ(u, e) := L(u; z) + β‖(1− e)� Du‖2︸ ︷︷ ︸S(Du,e)
+λR(e)
• PAM [Attouch et al. 2010]Set e[0] ∈ R|E| and u[0] ∈ R|Ω|.For k ∈ N⌊
u[k+1] ∈ arg minu Ψ(u, e[k]) + ck2 ‖u− u[k]‖2
e[k+1] ∈ arg mine Ψ(u[k+1], e) + dk2 ‖e− e[k]‖2
• Under technical assumptions, the sequence (u[k], e[k])`∈N converges toa critical point (u∗, e∗) of Ψ.
Technical assumptions = closed form of the proximity operator.
10/40
Context Mumford-Shah D-MS for images D-MS for graphs Conclusions
Proximity operator
Definition [Moreau,1965] Let ϕ ∈ Γ0(H) where H denotes a real Hilbertspace. The proximity operator of ϕ at point x ∈ H is the unique pointdenoted by proxϕx such that
(∀x ∈ H) proxϕx = arg miny∈H
ϕ(y) +1
2‖x − y‖2
11/40
Context Mumford-Shah D-MS for images D-MS for graphs Conclusions
Proximity operator
Definition [Moreau,1965] Let ϕ ∈ Γ0(H) where H denotes a real Hilbertspace. The proximity operator of ϕ at point x ∈ H is the unique pointdenoted by proxϕx such that
(∀x ∈ H) proxϕx = arg miny∈H
ϕ(y) +1
2‖x − y‖2
Examples: closed form expression• proxλ‖·‖1 : soft-thresholding with a fixed threshold λ > 0.
0 0.5 1 1.5 2 2.5
×104
-10
-8
-6
-4
-2
0
2
4
6
8
10
Identity
Soft-thresholding
λ
-λ
αi
• prox‖·‖1,2 [Peyré,Fadili,2011].• prox‖‖pp with p = {
43 ,
32 , 2, 3, 4}[Chaux et al.,2005].
• proxDKL [Combettes,Pesquet,2007].• prox∑
g∈G ‖·‖q with overlapping groups [Jenatton et al., 2011]
• Composition with a linear operator: proxϕ◦L closed form if LL∗ = νId[Pustelnik et al., 2016]
11/40
Context Mumford-Shah D-MS for images D-MS for graphs Conclusions
Proximity operator
Definition [Moreau,1965] Let ϕ ∈ Γ0(H) where H denotes a real Hilbertspace. The proximity operator of ϕ at point x ∈ H is the unique pointdenoted by proxϕx such that
(∀x ∈ H) proxϕx = arg miny∈H
ϕ(y) +1
2‖x − y‖2
Examples: closed form expression• proxλ‖·‖1 : soft-thresholding with a fixed threshold λ > 0.• prox‖·‖1,2 [Peyré,Fadili,2011].• prox‖‖pp with p = {
43 ,
32 , 2, 3, 4}[Chaux et al.,2005].
• proxDKL [Combettes,Pesquet,2007].
• prox∑g∈G ‖·‖q with overlapping groups [Jenatton et al., 2011]
• Composition with a linear operator: proxϕ◦L closed form if LL∗ = νId[Pustelnik et al., 2016]
11/40
Context Mumford-Shah D-MS for images D-MS for graphs Conclusions
Proximity operator
Definition [Moreau,1965] Let ϕ ∈ Γ0(H) where H denotes a real Hilbertspace. The proximity operator of ϕ at point x ∈ H is the unique pointdenoted by proxϕx such that
(∀x ∈ H) proxϕx = arg miny∈H
ϕ(y) +1
2‖x − y‖2
Examples: closed form expression• proxλ‖·‖1 : soft-thresholding with a fixed threshold λ > 0.• prox‖·‖1,2 [Peyré,Fadili,2011].• prox‖‖pp with p = {
43 ,
32 , 2, 3, 4}[Chaux et al.,2005].
• proxDKL [Combettes,Pesquet,2007].• prox∑
g∈G ‖·‖q with overlapping groups [Jenatton et al., 2011]
• Composition with a linear operator: proxϕ◦L closed form if LL∗ = νId[Pustelnik et al., 2016]
11/40
Context Mumford-Shah D-MS for images D-MS for graphs Conclusions
Proximity operator
Definition [Moreau,1965] Let ϕ ∈ Γ0(H) where H denotes a real Hilbertspace. The proximity operator of ϕ at point x ∈ H is the unique pointdenoted by proxϕx such that
(∀x ∈ H) proxϕx = arg miny∈H
ϕ(y) +1
2‖x − y‖2
Examples: closed form expression• proxλ‖·‖1 : soft-thresholding with a fixed threshold λ > 0.• prox‖·‖1,2 [Peyré,Fadili,2011].• prox‖‖pp with p = {
43 ,
32 , 2, 3, 4}[Chaux et al.,2005].
• proxDKL [Combettes,Pesquet,2007].• prox∑
g∈G ‖·‖q with overlapping groups [Jenatton et al., 2011]
• Composition with a linear operator: proxϕ◦L closed form if LL∗ = νId[Pustelnik et al., 2016]
11/40
Context Mumford-Shah D-MS for images D-MS for graphs Conclusions
Proximity operator → nonconvex setting
Proximal map for nonconvex functions [Rockafellar,Wets,1998]
Let f : RN →] −∞,+∞] be a proper, l.s.c function with infRN f > −∞.Given x ∈ RN and γ > 0, the proximal map associated to f is defined as
proxγf (x) = arg min1
2‖x − u‖22 + γf (u)
• The set proxγf (x) is nonempty and compact.• The set proxγf (x) is a set-valued map.• If f is also convex: unicity of proxγf (x).
12/40
https://www.springer.com/us/book/9783540627722
Context Mumford-Shah D-MS for images D-MS for graphs Conclusions
D-MS: PAM iterations
minimizeu,e
Ψ(u, e) := L(u; z) + β ‖(1− e)� Du‖2︸ ︷︷ ︸S(Du,e)
+λR(e)
• PAM [Attouch et al. 2010]Set e[0] ∈ R|E| and u[0] ∈ R|Ω|.For k ∈ N⌊
u[k+1] ∈ arg minu Ψ(u, e[k]) + ck2 ‖u− u[k]‖2
e[k+1] ∈ arg mine Ψ(u[k+1], e) + dk2 ‖e− e[k]‖2
• Under technical assumptions, the sequence (u[k], e[k])`∈N converges toa critical point (u∗, e∗) of Ψ.
Difficulty = proximity operator of a sum of two functions.
13/40
Context Mumford-Shah D-MS for images D-MS for graphs Conclusions
D-MS: PAM iterations
minimizeu,e
Ψ(u, e) := L(u; z) + β ‖(1− e)� Du‖2︸ ︷︷ ︸S(Du,e)
+λR(e)
• PAM [Attouch et al. 2010]Set e[0] ∈ R|E| and u[0] ∈ R|Ω|.For k ∈ N⌊
u[k+1] ∈ prox 1ck
Ψ(·,e[k])(u[k])
e[k+1] ∈ arg mine Ψ(u[k+1], e) + dk2 ‖e− e[k]‖2
• Under technical assumptions, the sequence (u[k], e[k])`∈N converges toa critical point (u∗, e∗) of Ψ.
Difficulty = proximity operator of a sum of two functions.
13/40
Context Mumford-Shah D-MS for images D-MS for graphs Conclusions
D-MS: PAM iterations
minimizeu,e
Ψ(u, e) := L(u; z) + β ‖(1− e)� Du‖2︸ ︷︷ ︸S(Du,e)
+λR(e)
• PAM [Attouch et al. 2010]Set e[0] ∈ R|E| and u[0] ∈ R|Ω|.For k ∈ N⌊
u[k+1] ∈ prox 1ckL(·;z)+ β
ckS(D·,e)(u
[k])
e[k+1] ∈ arg mine Ψ(u[k+1], e) + dk2 ‖e− e[k]‖2
• Under technical assumptions, the sequence (u[k], e[k])`∈N converges toa critical point (u∗, e∗) of Ψ.
Difficulty = proximity operator of a sum of two functions.
13/40
Context Mumford-Shah D-MS for images D-MS for graphs Conclusions
D-MS: PAM iterations
minimizeu,e
Ψ(u, e) := L(u; z) + β ‖(1− e)� Du‖2︸ ︷︷ ︸S(Du,e)
+λR(e)
• PAM [Attouch et al. 2010]Set e[0] ∈ R|E| and u[0] ∈ R|Ω|.For k ∈ N u[k+1] ∈ prox 1ck L(·;z)+ βck S(D·,e)(u[k])
e[k+1] ∈ prox 1dkβS(Du[k+1],·)+ λ
dkR(e
[k])
• Under technical assumptions, the sequence (u[k], e[k])`∈N converges toa critical point (u∗, e∗) of Ψ.
Difficulty = proximity operator of a sum of two functions.
13/40
Context Mumford-Shah D-MS for images D-MS for graphs Conclusions
Proximity operator of a sum of two functions
proxϕ1+ϕ2 = proxϕ2 ◦ proxϕ1 ?
• [Combettes-Pesquet, 2007] N = 1, ϕ2 = ιC of a non-empty closedconvex subset of C and ϕ1 is differentiable at 0 with h
′(0) = 0.
• [Chaux-Pesquet-Pustelnik,2009] C and ϕ2 are separable in the samebasis.
• [Yu, 2013][Shi et al., 2017] ∂ϕ2(x) ⊂ ∂ϕ2(proxϕ1(x)).• Other recent results [Pustelnik, Condat, 2017][Yukawa, Kagami,
2017][del Aguila Pla, Jaldén, 2017]
14/40
Context Mumford-Shah D-MS for images D-MS for graphs Conclusions
D-MS: PALM iterations
minimizeu,e
Ψ(u, e) := L(u; z) + β‖(1− e)� Du‖2︸ ︷︷ ︸S(Du,e)
+λR(e)
• PALM [Bolte, Sabach, Teboulle, 2013]Set u[0] ∈ R|Ω| and e[0] ∈ R|E|.For k ∈ N
Set γ > 1 and ck = γχ(e[k])
u[k+1] = prox 1ckL(·;z)
(u[k] − 1ck∇uS
(Du[k], e[k]
))Set δ > 1 and dk = δν(u
[k+1])
e[k+1] = prox 1dkλR
(e[k] − 1dk∇eS
(Du[k+1], e[k]
))• Under technical assumptions, the sequence (u[k], e[k])`∈N converges to
a critical point (u∗, e∗) of Ψ.
15/40
Context Mumford-Shah D-MS for images D-MS for graphs Conclusions
Proposed D-MS and algorithmic solution
minimizeu,e
Ψ(u, e) := L(u; z) + β‖(1− e)� Du‖2︸ ︷︷ ︸S(Du,e)
+λR(e),
• Proposed Semi Linearized PAM (SL-PAM)
[Foare, Pustelnik, Condat, 2017]
Set u[0] ∈ R|Ω| and e[0] ∈ R|E|.For ` ∈ N
Set γ > 1 and ck = γχ(e[k]).
u[k+1] = prox 1ckL(·;z)
(u[k] − 1ck∇uS
(Du[k], e[k]
))Set dk > 0.
e[k+1] = prox 1dkλR+S(Du[k+1],·)
(e[k])
16/40
Context Mumford-Shah D-MS for images D-MS for graphs Conclusions
Proposed D-MS and algorithmic solution
Proposition [Foare, Pustelnik, Condat, 2017]
The sequence (u[k], e[k])k∈N generated by SL-PAM converges to a criticalpoint of Ψ if
1. the updating steps of u[k+1] and e[k+1] have closed form expressions;
2. the sequence (u[k], e[k])k∈N generated by SL-PAM is bounded;
3. L(A·, z), R and Ψ(·, ·) are bounded below;4. Ψ is a Kurdyka- Lojasiewicz function;
5. ∇u and ∇e are globally Lipschitz continuous with moduli ν(e)
and
ε(u)
respectively, and for all k ∈ N, ν(e[k])
and ε(u[k])
are boundedby positive constants.
17/40
Context Mumford-Shah D-MS for images D-MS for graphs Conclusions
Proposed D-MS and algorithmic solution
minimizeu,e
Ψ(u, e) := L(u; z) + β‖(1− e)� Du‖2︸ ︷︷ ︸S(Du,e)
+λR(e),
• Proposed Semi Linearized PAM (SL-PAM)[Foare, Pustelnik, Condat, 2017]
Set u[0] ∈ R|Ω| and e[0] ∈ R|E|.For ` ∈ N
Set γ > 1 and ck = γχ(e[k]).
u[k+1] = prox 1ckL(·;z)
(u[k] − 1ck∇uS
(Du[k], e[k]
))Set dk > 0.
e[k+1] = prox 1dkλR+S(Du[k+1],·)
(e[k])
• The sequence (u[k], e[k])`∈N converges to a critical point (u∗, e∗) of Ψ⇒ Difficulty: Computation prox 1
dkλR+S(Du[k+1],·)
18/40
Context Mumford-Shah D-MS for images D-MS for graphs Conclusions
Proposed D-MS and algorithmic solution
Proposition [Foare, Pustelnik, Condat, 2017]We assume that S is separable, i.e,
(∀e=(ei )1≤i≤|E|) R(e) =|E|∑i=1
σi (ei ),
where σi :R|E|→]−∞; +∞] with a closed form proximity operator expres-sion.Let dk > 0, then
prox 1dkλR+S(Du[k+1],·)(e
[k]) =
(prox λσi
2β(Du[k])2i
+dk
β(Du[k+1])2i + dke[k]i2β(Du[k+1])2i +
dk2
)i∈E
19/40
Context Mumford-Shah D-MS for images D-MS for graphs Conclusions
Proposed D-MS and algorithmic solution
minimizeu,e
L(u; z) + β‖(1− e)� Du‖2 + λR(e)
• R: favors sparse solution (i.e.“short |K |”) and convex.
1. Ambrosio-Tortorelli approximation:
R(e) = ε‖De‖22 +1
4ε‖e‖22 with ε > 0
2. `1-norm: R(e) = ‖e‖1
3. Quadratic `1:[Foare, Pustelnik, Condat, 2017]
R(e) =∑|E|
i=1 max
{|ei |,
e2i4ε
}.
20/40
Context Mumford-Shah D-MS for images D-MS for graphs Conclusions
Proposed D-MS and algorithmic solution
Proposition [Foare,Pustelnik,Condat, 2017]For every η ∈ R and τ, � > 0
proxτ max{|.|, |.|
2
4�}(η) = sign(η) max
{0,min
[|η| − τ,max
(4�,
|η|τ2� + 1
)]}
21/40
Context Mumford-Shah D-MS for images D-MS for graphs Conclusions
Experiments
1. Visual results (proposed versus state-of-the-art) whenL(u; z) = 12‖u− z‖
22
2. Convergence comparisons (proposed versus PALM).
3. Sensitivity to the initialization.
4. Visual results when L(u; z) = 12‖Au− z‖22.
22/40
Context Mumford-Shah D-MS for images D-MS for graphs Conclusions
Experiments
23/40
Context Mumford-Shah D-MS for images D-MS for graphs Conclusions
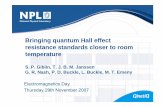
Experiments 1
TV (Strekalovskiy, Discret AT Quadratic-`1Cremers, 2014) (Foare et al., 2016)
24/40
Context Mumford-Shah D-MS for images D-MS for graphs Conclusions
Experiments 2
Convergence PALM versus SL-PALM: Ψ(u[`], e[`]) w.r.t. iterations `
25/40
Context Mumford-Shah D-MS for images D-MS for graphs Conclusions
Experiments 3
26/40
Context Mumford-Shah D-MS for images D-MS for graphs Conclusions
Experiments 4
27/40
Context Mumford-Shah D-MS for images D-MS for graphs Conclusions
D-MS for images: conclusions
• Efficient (convergence guarantees and time) algorithm for solving ageneric D-MS model.
• Flexibility in the data-term: possibility to handle many imagedegradation to improve interface detection (Poisson noise, blur,...).
• Flexibility in the choice of the discrete difference operator consideredhere.
28/40
Context Mumford-Shah D-MS for images D-MS for graphs Conclusions
D-MS for mixing matrix estimation
• V ={v (n)
∣∣ n ∈ {1, . . . ,N}} set of vertices = objects
• E ={e(n,m)
∣∣ (n,m) ∈ E} set of edges = object relationships
• directed nonreflexive graph:|E| ≤ N(N − 1)
• Goal: For each node n, estimation of a mixing matrice Mn ∈ RP×Qsuch that sn = Mnzn with (zn, sn) known.
Example: vote transfer matrix estimation withN : number of vote location
zn/sn : number of vote for each candidate at the first/second tour
Mn : vote postponement
29/40
Context Mumford-Shah D-MS for images D-MS for graphs Conclusions
D-MS for mixing matrix estimation
• Goal: For each node n, estimation of a mixing matrice Mn ∈ RP×Qsuch that sn = Mnzn with (zn, sn) known.Example: vote transfer matrix estimation withN : number of vote location
zn/sn : number of vote for each candidate at the first/second tour
Mn : vote postponement29/40
Context Mumford-Shah D-MS for images D-MS for graphs Conclusions
D-MS for mixing matrix estimation
minimizeM,e
Ψ(M, e) :=N∑
n=1
‖zn −Mnsn‖2︸ ︷︷ ︸L(M;z,s)
+N∑
n=1
ιC (Mn)
+ β∑
(n,m)∈E
(1− en,m)2‖Mn −Mm‖2F︸ ︷︷ ︸S(M,e)
+λR(e)
Simplified notations:
minimizeM,e
Ψ(M, e) := L(M; z, s) + ιC (M) + βS(M, e) + λR(e)
30/40
Context Mumford-Shah D-MS for images D-MS for graphs Conclusions
D-MS for mixing matrix estimation
minimizeM,e
Ψ(M, e) :=N∑
n=1
‖zn −Mnsn‖2︸ ︷︷ ︸L(M;z,s)
+N∑
n=1
ιC (Mn)
+ β∑
(n,m)∈E
(1− en,m)2‖Mn −Mm‖2F︸ ︷︷ ︸S(M,e)
+λR(e)
Simplified notations:
minimizeM,e
Ψ(M, e) := L(M; z, s) + ιC (M) + βS(M, e) + λR(e)
30/40
Context Mumford-Shah D-MS for images D-MS for graphs Conclusions
HL-PAM for mixing matrice estimation
minimizeM,e
Ψ(M, e) := L(M; z, s) + ιC (M) + βS(M, e) + λR(e)
• Proposed HL-PAM for mixing matrice estimationSet M[0] ∈ RP×Q×N and e[0] ∈ R|E|.For k ∈ N
Set γ > 1 and ck = γχ(e[k]).
M[k+1] ∈ prox 1ckL(·;z;s)+ιC
(M[k] − 1ck∇1S
(M[k], e[k]
))Set dk > 0.
e[k+1] ∈ prox 1dkλR+S(M[k]+1,·)
(e[k])
⇒ Difficulty : Not a closed form expression for prox 1ckL(·;z;s)+ιC
31/40
Context Mumford-Shah D-MS for images D-MS for graphs Conclusions
Proposed algorithm for mixing matrice estimation
minimizeM,e
Ψ(M, e) := L(M; z, s) + ιC (M) + βS(M, e) + λR(e)
• Proposed HL-PAM for mixing matrice estimationSet M[0] ∈ RP×Q×N and e[0] ∈ R|E|.For k ∈ N
Set γ > 1 and ck = γχ(e[k]).
M[k+1] ∈ PC(
M[k] − 1ck∇1S(M[k], e[k]
)− 1ck∇L(M
[k]; z; s))
Set dk > 0.
e[k+1] ∈ prox 1dkλR+S(M[k]+1,·)
(e[k])
• The sequence (M[k], e[k])`∈N converges to a critical point (∗, e∗) of Ψ.[Kaloga, Foare, Pustelnik, Jensen, 2019]
32/40
Context Mumford-Shah D-MS for images D-MS for graphs Conclusions
Proposed algorithm for mixing matrice estimation
minM,e
Ψ(M, e) :=∑n
(Ln(Mn; zn, sn) + ιCn(Mn) + βSn(Mn, en)
)+ λR(e)
• Proposed Block HL2-PAM for mixing matrice estimationSet M
[0]n ∈ Cn and e[0] ∈ R|E|.
For k ∈ N
Set χn(e[k]) the Lipschitz constant of ∇1S(·, e[k]
)+∇L(·; z; s);
Set γ > 1 , dk > 0 and ck,n = γχn(e[k]), .
For n = 1, . . . ,N
bM[k+1]n ∈ PC(
M[k]n − 1ck,n∇1S
(M
[k]n , e[k]
)− 1ck∇L(M
[k]n ; zn; sn)
)e[k+1] ∈ prox 1
dkλR+S(M[k]+1,·)
(e[k])
• The sequence (M[k], e[k])`∈N converges to a critical point (z∗, e∗) ofΨ. [Kaloga, Foare, Pustelnik, Jensen, 2019]
33/40
Context Mumford-Shah D-MS for images D-MS for graphs Conclusions
Experiments
1. Visual results of the estimation.
2. Convergence comparisons (block versus global).
3. Sensitivity to the initialization.
34/40
Context Mumford-Shah D-MS for images D-MS for graphs Conclusions
Experiments 1
Original Estimated
35/40
Context Mumford-Shah D-MS for images D-MS for graphs Conclusions
Experiments 2
36/40
Context Mumford-Shah D-MS for images D-MS for graphs Conclusions
Experiments 3
37/40
Context Mumford-Shah D-MS for images D-MS for graphs Conclusions
Take home messages
• Proximal alternate scheme with linearization fit D-MS model.• Design of a new algorithm with convergence guarantees for
minimization problem of the form
minimizeu,e
L(u; z) + β‖(1− e)� Du‖2 + λR(e)
when R is a separable function and L(·; z) has a closed formexpression.
• Design of a new algorithm with convergence guarantees forminimization problem of the form
minimizeM,e
Ψ(M, e) := L(M; z, s) + ιC (M) + βS(M, e) + λR(e)
when R is a separable function, L is a differentiable with gradientLipschitz function, and PC has a closed form expression.
• Flexibility in the objective function design.38/40
Context Mumford-Shah D-MS for images D-MS for graphs Conclusions
Open questions
minimizeu,e
L(u; z) + β‖(1− e)� Du‖2 + λR(e)
• Acceleration of this algorithmic schemes.• From MS to semi-supervised learning.• Robustness to the initialization → stronger results in the biconvex
case ?
• Discretization scheme to improve interface detection (choice of D).Convergence to the true MS model (cf. [Belz, Bredies;2019]) ?
• Selection of the hyperparameters (λ, β) using a Bayesian formulation.
39/40
Context Mumford-Shah D-MS for images D-MS for graphs Conclusions
ReferencesM. Foare, N. Pustelnik, and L. Condat, Semi-linearized proximal alternatingminimization for a discrete Mumford-Shah model, preprint, 2018.
Y. Kaloga, M. Foare, N. Pustelnik, and P. Jensen, Discrete Mumford-Shah ongraph for mixing matrix estimation, accepted to IEEE Signal Processing Letters,2019.
N. Pustelnik, L. Condat, Proximity Operator of a Sum of Functions; Application toDepth Map Estimation, IEEE Signal Processing Letters, vol. 24, no. 12, pp. 1827 -1831, Dec. 2017.
M. Foare, N. Pustelnik, L. Condat A new proximal method for joint imagerestoration and edge detection with the Mumford-Shah model, IEEE ICASSP,Calgary, Alberta, Canada, Apr. 15-20, 2018.
B. Pascal, N. Pustelnik, P. Abry, M. Serres, V. Vidal Joint estimation of localvariance and local regularity for texture segmentation. Application to multiphaseflow characterization, IEEE ICIP, Athens, Greece, Oct. 7-10, 2018.
40/40





![THE MUMFORD CONJECTURE [after Madsen and Weiss] …andyp/teaching/2011FallMath541/PowellSurvey.pdf · THE MUMFORD CONJECTURE [after Madsen and Weiss] by Geoffrey POWELL 1. INTRODUCTION](https://static.fdocument.org/doc/165x107/5e7a09cb7334ee1c0922902b/the-mumford-conjecture-after-madsen-and-weiss-andypteaching2011fallmath541.jpg)


![ΕΚΠΑΙΔΕΥΣΗ ΜΟΥΣΟΥΛΜΑΝΟΠΑΙΔΩΝ 2002-2004repository.edulll.gr/edulll/bitstream/10795/654/2/654.pdf · mumford, 1997 [1952], σ. 22-23, 28, 38 Πρόλογος](https://static.fdocument.org/doc/165x107/5ec68ac25f9a03785a279587/-oeoe-2002-mumford-1997-1952.jpg)