Development of innovative magnetic field sensors with ...
1
The detection range is the following: [1μT-2T] Student: Valentina Maria Sinatra Tutor: Prof. Ing. Salvatore Baglio Academic Year: 2017/2018 Dottorato di Ricerca in Ingegneria dei Sistemi, Energetica, Informatica e delle Telecomunicazioni XXXII Ciclo Development of innovative magnetic field sensors with tuning features for a wide operative range RESEARCH TOPIC The goal of this research activity consists in the development of integrated magnetic field sensors with a wide and “tunable” operating range and a constant resolution throughout the whole operating range. Two applications are planned for the sensors to be developed: ➢ detection of parking slot occupancy through the sensing of the alterations induced to the local strength of the geomagnetic field due to the presence of metallic targets such as cars or trucks. ➢mapping of the magnetic field dispersed in a particle accelerator. This Ph.D. project is focused BOTH toward industrial and scientific applications, it is expected to develop and test the sensor prototypes both at the research company and research entity involved, each for its own context. THE LORENTZ FORCE MAGNETOMETER: WORKING PRINCIPLE AND PiezoMUMPs TECHNOLOGY This typology of sensor is based on the interaction between an unknown external magnetic field to be estimated and a known current generated into an U-shaped cantilever beam. If the current I is driven into the cantilever, the interaction between this current and the magnetic field B produces the Lorentz force, F, whose amplitude is: F= I·B·L . MODEL ANALYSIS IN MATLAB – SIMULINK Fig. 1 : Schematic representation Fig. 2 : Cross sectional view FEM ANALYSIS IN COMSOL MULTIPHYSICS FURTHER ACTIVITIES At the moment the research activity is engaged in the study and the simulation of circuit conditioning for both readout strategies. The following steps will be focused on the characterization of MEMS devices and on the preparation for sensor applications, in details at CERN and Paradox Engineering. Different topologies of the U-shaped beam cantilever have been considered in order to investigate static and dynamic model and to evaluate the displacement. It seemed evident that the more the effective length of the arms is, the lower the stiffness is with a consequence increase of the displacement. The best architecture, shown in Fig. 5, has been selected and has been compared with the simple U-shaped beam cantilever having the same geometrical characteristics. where L quantity is the length of cantilever subjected to perpendicular B. The measurand to be evaluated is converted in a voltage through the use of a piezo-electric material composing the MEMS device. Indeed for fabricating the sensor prototype the PiezoMUMPs technology has been selected where an AlN (Aluminum Nitride) piezoelectric layer is used to generate an electric output: : this aspect represents the most important advantage in this process, because an electric signal is directly available in the output of the sensor. Fig. 5 : Meander architecture Fig. 3 : Topology 1 Fig. 4 : Topology 5 In order to obtain a complete overview of the device in terms of the displacement and the stress, a FEM analysis has been examined and the geometry has been implemented taking account into the PiezoMUMPs technology (Fig.2). The geometry has been divided in two domains to achieve an optimized mesh (fitted and normal). Fig. 7 : Displacement Fig. 8: von Mises stress LAYOUT THROUGH THE MEMSPRO CAD Fig. 6 : Optimized mesh Two layouts have been implemented using the MEMSPro CAD to reproduce the PiezoMUMPs technology. They have been realized in order to have to different readout strategies: piezoelectric and capacitive. They have been sent to the MEMSCAP foundry. The idea is to compare the performance of the new architecture with the U-shaped beam cantilever. In Fig. 11 a second proof mass has been inserted to improve the sensitivity. Fig. 9 : Simple U-shaped beam cantilever Anchor Pad Electrodes Fig. 10 : Details Fig. 11 : Meander structure
Transcript of Development of innovative magnetic field sensors with ...

The detection range is the following:
[1μT-2T]
Student: Valentina Maria SinatraTutor: Prof. Ing. Salvatore Baglio Academic Year: 2017/2018
Dottorato di Ricerca in Ingegneria dei Sistemi, Energetica,
Informatica e delle Telecomunicazioni XXXII Ciclo
Development of innovative magnetic field sensors with tuning features for a wide operative range
RESEARCH TOPICThe goal of this research activity consists in the development ofintegrated magnetic field sensors with a wide and “tunable”operating range and a constant resolution throughout the wholeoperating range. Two applications are planned for the sensors to bedeveloped:
➢ detection of parking slot occupancy through the sensing of thealterations induced to the local strength of the geomagnetic field dueto the presence of metallic targets such as cars or trucks.➢mapping of the magnetic field dispersed in a particle accelerator.
This Ph.D. project is focused BOTH toward industrialand scientific applications, it is expected to developand test the sensor prototypes both at the researchcompany and research entity involved, each for its owncontext.
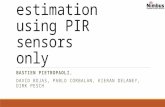
THE LORENTZ FORCE MAGNETOMETER: WORKING PRINCIPLE AND PiezoMUMPs TECHNOLOGY
This typology of sensor is based on the interaction between an unknown external magnetic field to be estimated and a known currentgenerated into an U-shaped cantilever beam. If the current I is driven into the cantilever, the interaction between this current and the magneticfield B produces the Lorentz force, F, whose amplitude is:
F= I·B·L
.
MODEL ANALYSIS IN MATLAB – SIMULINK
Fig. 1 : Schematic representation
Fig. 2 : Cross sectional view
FEM ANALYSIS IN COMSOL MULTIPHYSICS
FURTHER ACTIVITIESAt the moment the research activity is engaged in the study and the simulation of circuit conditioning for both readout strategies. The following steps will be focused on the characterization ofMEMS devices and on the preparation for sensor applications, in details at CERN and Paradox Engineering.
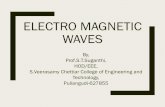
Different topologies of the U-shaped beam cantilever have been considered in order to investigate static and dynamic model and to evaluate the displacement. It seemed evident that the morethe effective length of the arms is, the lower the stiffness is with a consequence increase of the displacement. The best architecture, shown in Fig. 5, has been selected and has been comparedwith the simple U-shaped beam cantilever having the same geometrical characteristics.
where L quantity is the length of cantilever subjected to perpendicular B. Themeasurand to be evaluated is converted in a voltage through the use of a piezo-electricmaterial composing the MEMS device.
Indeed for fabricating the sensor prototype the PiezoMUMPs technology has beenselected where an AlN (Aluminum Nitride) piezoelectric layer is used to generate anelectric output: : this aspect represents the most important advantage in this process,because an electric signal is directly available in the output of the sensor.
Fig. 5 : Meander architecture Fig. 3 : Topology 1 Fig. 4 : Topology 5
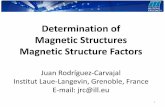
In order to obtain a complete overview of the device in terms of the displacement and the stress, a FEM analysis has been examined and the geometry has beenimplemented taking account into the PiezoMUMPs technology (Fig.2). The geometry has been divided in two domains to achieve an optimized mesh (fitted andnormal).
Fig. 7 : Displacement Fig. 8: von Mises stress
LAYOUT THROUGH THE MEMSPRO CAD
Fig. 6 : Optimized mesh
Two layouts have been implemented using the MEMSPro CAD toreproduce the PiezoMUMPs technology. They have been realized inorder to have to different readout strategies: piezoelectric andcapacitive. They have been sent to the MEMSCAP foundry.
The idea is to compare the performance of the new architecturewith the U-shaped beam cantilever.
In Fig. 11 a second proof mass has been inserted to improve thesensitivity.
Fig. 9 : Simple U-shaped beam cantilever
Anchor
Pad Electrodes
Fig. 10 : Details Fig. 11 : Meander structure