
Das Hydrodynamische Modell 1. Einleitung · der Hydrodynamik. Der Massenfluß durch ein...
27
KAPITEL C Das Hydrodynamische Modell 1. Einleitung Der konsequente Weg zur Entwickung von Gleichungen, die das Verhalten von Plasma be- schreiben, geht von der Einteilchenbewegung aus. Über statistische Methoden werden dann Gleichungen für die makroskopischen Größen abgeleitet, d.h. für die Massendichte ρ(r,t), La- dungsdichte ρ e (r,t), das Geschwindigkeitsfeld v(r,t), die Stromdichte j(r,t), das elektrische (E) und magnetische (B) Feld. Alle diese Größen sind im allgemeinen orts- und zeitabhängig und stellen geglättete Mittelwerte dar. Z.B. enthält das elektrische Feld einen stark schwan- kenden Anteil, der sich durchaus in bestimmten Situationen bemerkbar macht, wie z.B. bei der Verbreiterung von Spektrallinien. Das makroskopische Feld stellt einen Mittelwert über diese Schwankungen dar. Im folgenden wird dieser Weg nicht beschritten. Statt dessen werden die Flüssigkeitsglei- chungen intuitiv ausgehend von Kontinuumsvorstellungen hingeschrieben. Die resultierenden Gleichungen sind die Grundlage der Magnetohydrodynamik (MHD). Diese wird angewandt zur Beschreibung der Bewegung flüssiger Metalle in magnetischen und elektrischen Feldern. Sie liefert aber auch gute Ergebnisse bei der Betrachtung von Gleichgewicht und makroskopi- schen Instabilitäten im Plasma. Außerdem können langsame Wellenvorgänge behandelt wer- den. Im Plasma spielt im Gegensatz zur Situation in Flüssigmetallen im allgemeinen die Kompressibilität des Mediums eine Rolle. Ähnlich wie bei Gasströmungen kann man auch im Plasma bei nicht zu hohen Geschwindigkeiten die Kompression vernachlässigen. Bei der Be- trachtung von Pinchexperimenten oder hydromagnetischen Wellen ist im allgemeinen die Komprimierbarkeit des Plasmas entscheidend. Wie bei der Behandlung der Metalle berücksichtigt man in der MHD-Theorie in der Srom- dichte nur den Elektronenstom. Während man in Metallen die magnetischen Eigenschaften über eine relative Permabilität beschreibt, geht man in der MHD-Theorie von der Perma- μ r bilität des Vakuums aus ( μ r =1) und beschreibt die magnetischen Eigenschaften über die Stromdichte im Plasma. Ähnliches gilt zumeist für ε r . 2. Grundgleichungen Die Grundgleichungen der MHD sind die Flüssigkeitsgleichungen, in denen die für Plasmen charakteristischen elektromagnetischen Kräfte berücksichtigt werden. Für die elektromagneti- schen Felder benötigt man die Maxwellgleichungen sowie verallgemeinerte Materialgleichun- gen wie das Ohmsche Gesetz. a) Die Bewegungsgleichung Wir betrachten ein Flüssigkeitselement ∆m, auf das die Kraft ∆F wirkt. Die Bewegungs- gleichung dieses Flüssigkeitselementes ist dann ∆m • v= ∆F 45
Transcript of Das Hydrodynamische Modell 1. Einleitung · der Hydrodynamik. Der Massenfluß durch ein...
KAPITEL C
Das Hydrodynamische Modell
1. EinleitungDer konsequente Weg zur Entwickung von Gleichungen, die das Verhalten von Plasma be-schreiben, geht von der Einteilchenbewegung aus. Über statistische Methoden werden dannGleichungen für die makroskopischen Größen abgeleitet, d.h. für die Massendichte ρ(r,t), La-dungsdichte ρe(r,t), das Geschwindigkeitsfeld v(r,t), die Stromdichte j(r,t), das elektrische(E) und magnetische (B) Feld. Alle diese Größen sind im allgemeinen orts- und zeitabhängigund stellen geglättete Mittelwerte dar. Z.B. enthält das elektrische Feld einen stark schwan-kenden Anteil, der sich durchaus in bestimmten Situationen bemerkbar macht, wie z.B. beider Verbreiterung von Spektrallinien. Das makroskopische Feld stellt einen Mittelwert überdiese Schwankungen dar.Im folgenden wird dieser Weg nicht beschritten. Statt dessen werden die Flüssigkeitsglei-chungen intuitiv ausgehend von Kontinuumsvorstellungen hingeschrieben. Die resultierendenGleichungen sind die Grundlage der Magnetohydrodynamik (MHD). Diese wird angewandtzur Beschreibung der Bewegung flüssiger Metalle in magnetischen und elektrischen Feldern.Sie liefert aber auch gute Ergebnisse bei der Betrachtung von Gleichgewicht und makroskopi-schen Instabilitäten im Plasma. Außerdem können langsame Wellenvorgänge behandelt wer-den. Im Plasma spielt im Gegensatz zur Situation in Flüssigmetallen im allgemeinen dieKompressibilität des Mediums eine Rolle. Ähnlich wie bei Gasströmungen kann man auch imPlasma bei nicht zu hohen Geschwindigkeiten die Kompression vernachlässigen. Bei der Be-trachtung von Pinchexperimenten oder hydromagnetischen Wellen ist im allgemeinen dieKomprimierbarkeit des Plasmas entscheidend.Wie bei der Behandlung der Metalle berücksichtigt man in der MHD-Theorie in der Srom-dichte nur den Elektronenstom. Während man in Metallen die magnetischen Eigenschaftenüber eine relative Permabilität beschreibt, geht man in der MHD-Theorie von der Perma-µr
bilität des Vakuums aus ( µr =1) und beschreibt die magnetischen Eigenschaften über dieStromdichte im Plasma. Ähnliches gilt zumeist für εr.
2. GrundgleichungenDie Grundgleichungen der MHD sind die Flüssigkeitsgleichungen, in denen die für Plasmencharakteristischen elektromagnetischen Kräfte berücksichtigt werden. Für die elektromagneti-schen Felder benötigt man die Maxwellgleichungen sowie verallgemeinerte Materialgleichun-gen wie das Ohmsche Gesetz.a) Die BewegungsgleichungWir betrachten ein Flüssigkeitselement ∆m, auf das die Kraft ∆F wirkt. Die Bewegungs-gleichung dieses Flüssigkeitselementes ist dann
∆m•v= ∆F
45
In Flüssigkeiten ist es sinnvoll, ∆m und ∆F auf das Volumen zu beziehen. Durch Differentia-tion erhält man dann
ρ•v= f
mit ρ = dm/dV (Massendichte) und f = dF/dV (Kraftdichte)
α) Die substantielle und die lokale AbleitungDie Geschwindigkeit ist die des Flüssigkeitselementes, d.h. eines Paketes, das immer die glei-chen Teilchen enthält. ist daher die Beschleunigung, die dieses Paket auf seiner Bahn r(t)
•v
erfährt. Man nennt daher die substantielle Ableitung. Primär ist im allgemeinen das•v= dv
dtGeschwindigkeitsfeld bekannt, wobei ist. Der Zusammenhang zwischen substantiel-
•r (t) = v
ler Ableitung und der lokalen Ableitung des Geschwindigkeitsfeldes erhält man, in-∂v(r, t)
∂tdem man für r die Teilchenbahn r(t) einsetzt:
dvx(r(t), t)dt
= ∂vx
∂t+ ∂vx
∂xdxdt
+ ∂vx
∂ydydt
+ ∂vx
∂zdzdt
...
...
= ∂vx
∂t+ ∂vx
∂xvx + ∂vx
∂yvy + ∂vx
∂zvz
...
...
dvdt
= ∂v∂t
+ (v • ∇)v
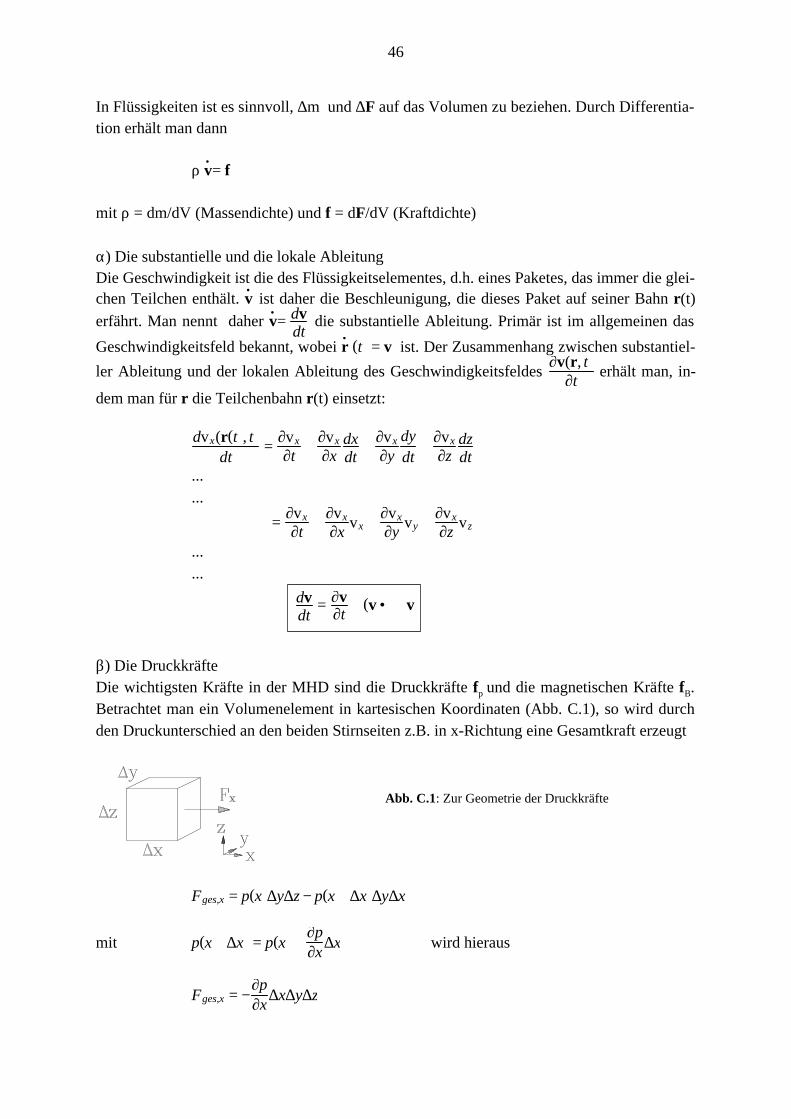
β) Die DruckkräfteDie wichtigsten Kräfte in der MHD sind die Druckkräfte fp und die magnetischen Kräfte fB.Betrachtet man ein Volumenelement in kartesischen Koordinaten (Abb. C.1), so wird durchden Druckunterschied an den beiden Stirnseiten z.B. in x-Richtung eine Gesamtkraft erzeugt
Fges,x = p(x)∆y∆z − p(x + ∆x)∆y∆x
mit wird hierausp(x + ∆x) = p(x) +∂p∂x
∆x
Fges,x = −∂p∂x
∆x∆y∆z
46
Abb. C.1: Zur Geometrie der Druckkräfte
und als Vektor
fp = −∇p
γ) Die magnetischen KräfteDie magnetischen Kräfte haben ihren Ursprung in den Lorentzkräften auf die geladenen Teil-chen, die sich im Magnetfeld bewegen. Die Strömungsgeschwindgiekt v ist im wesentlichendurch die Geschwindigkeit der Ionen gegeben. Bewegen sich Ionen und Elektronen mit dergleichen Geschwindigkeit v, so entstehen keine resultierenden Kräfte auf das Plasma, da sichwegen der Ladungsneutralität Kräfte auf Ionen und Elektronen kompensieren. Haben Elektro-nen eine von der Strömungsgeschwingkeit abweichende Geschwindigkeit
ve,ges = v; + ve
so fließt ein Strom durch die Flüssigkeit mit einer Stromdichte
j = qeneve
Pro Elektron ergibt sich eine Lorentzkraft
Fe = qeve × B
und eine Kraftdichte
fe = neqeve × B
Die Kraftdichte wirkt zunächst auf die Elektronen, wird aber wegen der Ladungsneutralitätsofort auf die Ionen übertragen. Die magnetische Kraftdichte hat also die Form
fB = j × B
δ) Die Bewegungsgleichung in MHD-NäherungElektrostatische Kräfte spielen in der MHD-Näherung aufgrund der Quasineutralität keineRolle. Im Prinzip muß man viskose Kräfte mitnehmen. Wenn man dieses tut, gibt man ihnenmeist die Form, die sie in den Navier-Stokes Gleichungen haben.
fV = η∇2v
In vielen Fällen läßt man die viskosen Kräfte weg. Die Bewegungsgleichungen haben danndie Form
47

(C.1)ρ
∂v∂t
+ (v • ∇)v = −∇p + j × B
Für B = 0 ergeben sich die Eulerschen Gleichungen.
b) Das Ohmsche Gesetzα) Ohne MagnetfeldAuch das ohmsche Gesetz muß auf lokale Größen umgeschrieben werden. Betrachtet man dasVolumenselement in Abb. C.2
und greift zunächst die x-Richtung heraus, so wird aus ∆U = IR
jx = IAx
= 1R
∆UAx
Da , wenn σ die Leitfähtigkeit des Materials ist, wirdR = 1σ
lA
jx = σ∆U∆x = σEx
insgesamt j = σE
β) Durch Bewegung des Schwerpunktes im B-Feld induziertes Ev
Dadurch, daß sich der Schwerpunkt der Flüssigkeit im Magnetfeld bewegt, wirkt auf Elektro-nen und Ionen eine entgegengesetzt gleiche Lorentzkraft
Fa = qav × B
Die Ladungstrennung kommt zum Stillstand, wenn das entstehende Feld gleich der Lorentz-kraft ist
Ev = Faqa
= v × B
Diese Feldstärke muß bei einer Strömung der Flüssigkeit im Magnetfeld mit berücksichtigtwerden. Das Ohmsche Gesetz, das für die MHD im engeren Sinne maßgeblich ist, hat daherdie Form
48
Abb. C.2: Geometrie zum allgemeineren ohmschen Gesetzes
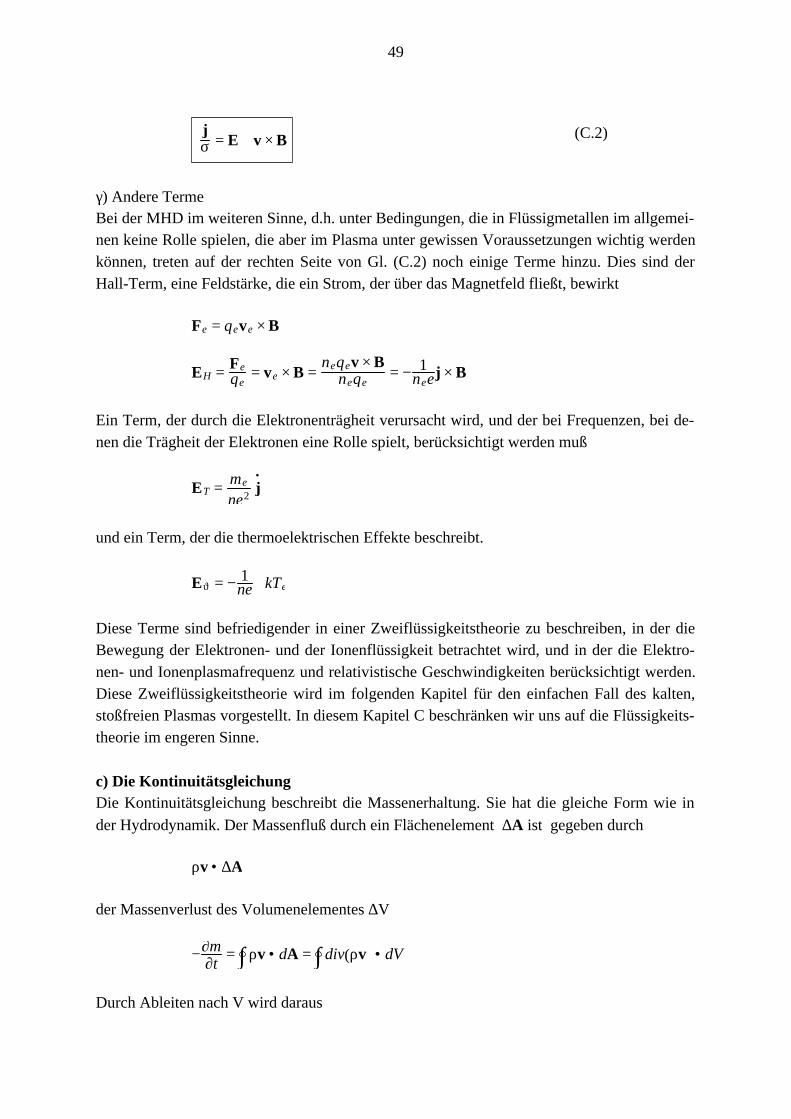
(C.2)jσ = E + v × B
γ) Andere TermeBei der MHD im weiteren Sinne, d.h. unter Bedingungen, die in Flüssigmetallen im allgemei-nen keine Rolle spielen, die aber im Plasma unter gewissen Voraussetzungen wichtig werdenkönnen, treten auf der rechten Seite von Gl. (C.2) noch einige Terme hinzu. Dies sind derHall-Term, eine Feldstärke, die ein Strom, der über das Magnetfeld fließt, bewirkt
Fe = qeve × B
EH = Feqe
= ve × B =neqev × B
neqe= − 1
neej × B
Ein Term, der durch die Elektronenträgheit verursacht wird, und der bei Frequenzen, bei de-nen die Trägheit der Elektronen eine Rolle spielt, berücksichtigt werden muß
ET = me
ne2
•j
und ein Term, der die thermoelektrischen Effekte beschreibt.
Eϑ = − 1ne∇kTe
Diese Terme sind befriedigender in einer Zweiflüssigkeitstheorie zu beschreiben, in der dieBewegung der Elektronen- und der Ionenflüssigkeit betrachtet wird, und in der die Elektro-nen- und Ionenplasmafrequenz und relativistische Geschwindigkeiten berücksichtigt werden.Diese Zweiflüssigkeitstheorie wird im folgenden Kapitel für den einfachen Fall des kalten,stoßfreien Plasmas vorgestellt. In diesem Kapitel C beschränken wir uns auf die Flüssigkeits-theorie im engeren Sinne.
c) Die KontinuitätsgleichungDie Kontinuitätsgleichung beschreibt die Massenerhaltung. Sie hat die gleiche Form wie in
der Hydrodynamik. Der Massenfluß durch ein Flächenelement ∆A ist gegeben durch
ρv • ∆A
der Massenverlust des Volumenelementes ∆V
−∂m∂t
= ∫ ρv • dA = ∫ div(ρv) • dV
Durch Ableiten nach V wird daraus
49

(C.3)−∂ρ∂t
= div(ρv)
Bei einer inkompressiblen Flüssigkeit ist ρ = ρ0 und damit div v = 0.
d) Die MaxwellgleichungenDie Felder, Strom- und Ladungsdichten hängen über die Maxwellgleichungen miteinanderzusammen. Wir benutzen sie in der Form
divE =ρe
ε0
divB = 0
rotE = −∂B∂t
rotB = µ0j
Der Verschiebungsstrom kann, wenn die charakteristischen Geschwindigkeiten klein1c2
•E
gegen die Lichtgeschwindigkeit sind, ähnlich wie in elektrotechnischen Problemen fortgelas-sen werden. Um dies zu zeigen, nehmen wir an, daß die typischen Phänomene durch einenWellenansatz beschrieben werden können
B = B0e i(ωt−k•r)
E = E0e i(ωt−k•r)
Wir schätzen den Term gegen rot B ab:1c2
•E
1c2
•E ; ∼ ω
c2E
Da wird kE ~ ωB, E ~ (ω/k)BrotE = −•B
1c2
•E;∼ ω2
kc2B
Andererseits
rot B ~ kB
Der Verschiebungsstrom ist also zu vernachlässigen, wenn
50
ω2
kc2<< k
ω2
k2c2<< 1
vc
2
<< 1
3. Die Diffusion des Magnetfeldesa) DiffusionsgleichungWir betrachten zunächst ein ruhendes Plasma (bei einem bewegten transformieren wir in dasSchwerpunktsystem des Plasmas). Im Außenraum wird ein Magnetfeld angelegt, dessen Zeit-verlauf an der Oberfläche des Körpers bekannt ist. Das Magnetfeld induziert aufgrund des In-duktionsgesetzes ein elektrisches Feld
rotE = −•B
das über das Ohmsche Gesetz
(für v = 0)j = σE
einen Strom zur Folge hat, der über das Ampèresche Gesetz
rotB = µ0j
mit dem Magnetfeld verknüpft ist. j kann direkt über die letzte Gleichung eliminiert werden.Zur Elimination von E muß einmal die Rotation gebildet werden. Man erhält dann eine Diffe-rentialgleichung für B
.rotrotB = −µ0σ•B
Mit der Vektoridentität
rotrotB = ∇(∇ • B) − ∇2B
und ergibt sich die Diffusionsgleichung∇ • B = 0
(C.4)∇2B; = µ0σ•B
Diese ist analog aufgebaut zu anderen Diffusionsgleichungen, z.B. der Wärmediffusionsglei-chung
51
•T= κ∇2T
Anmerkung:Auch für ein bewegtes Plasma kann j und E wie oben eliminiert werden. Man erhält aus derBewegungsgleichung und dem allgemeinen Ohmschen Gesetz zwei Gleichungen für die Va-riablen B und v, die die Dynamik von leitfähigen Flüssigkeiten in Magnetfeldern beschreiben
(C.5)ρdvdt
= −∇p + 1µ0
(rotB) × B
(C.6)1µ0σrotrotB = −
•B +rot(v × B)
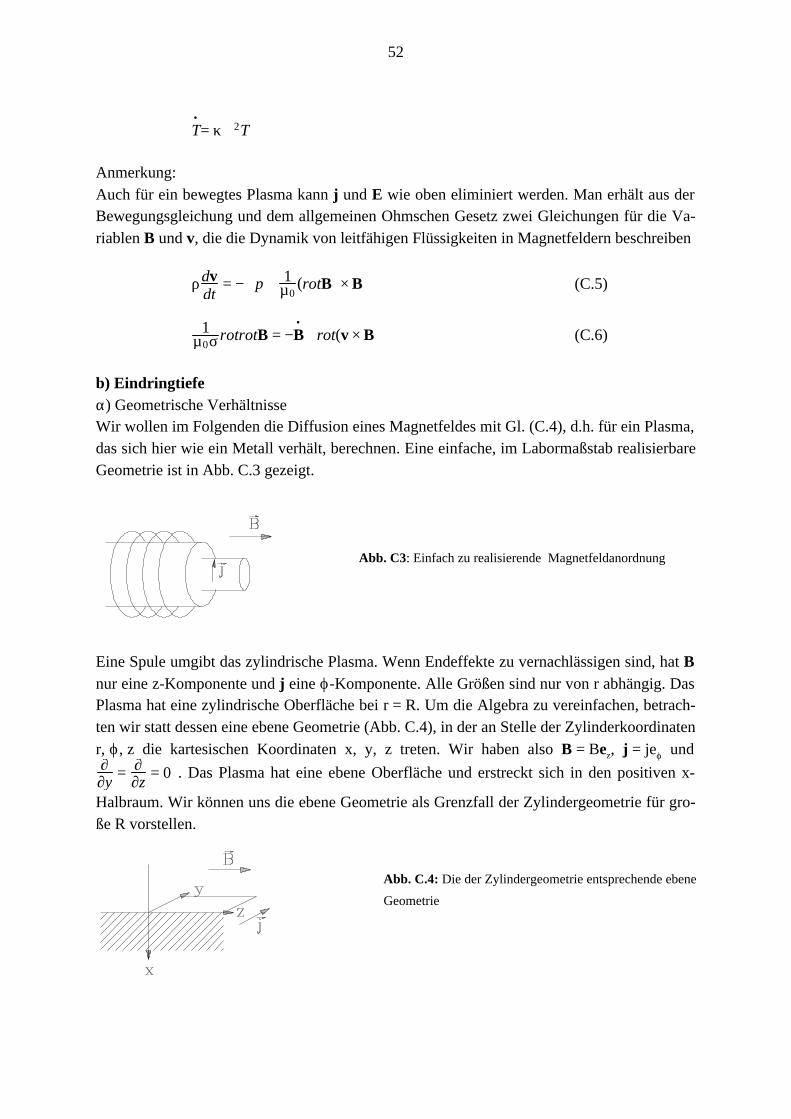
b) Eindringtiefeα) Geometrische VerhältnisseWir wollen im Folgenden die Diffusion eines Magnetfeldes mit Gl. (C.4), d.h. für ein Plasma,das sich hier wie ein Metall verhält, berechnen. Eine einfache, im Labormaßstab realisierbareGeometrie ist in Abb. C.3 gezeigt.
Eine Spule umgibt das zylindrische Plasma. Wenn Endeffekte zu vernachlässigen sind, hat Bnur eine z-Komponente und j eine ϕ-Komponente. Alle Größen sind nur von r abhängig. DasPlasma hat eine zylindrische Oberfläche bei r = R. Um die Algebra zu vereinfachen, betrach-ten wir statt dessen eine ebene Geometrie (Abb. C.4), in der an Stelle der Zylinderkoordinatenr, ϕ, z die kartesischen Koordinaten x, y, z treten. Wir haben also B = Bez, j = jeϕ und
. Das Plasma hat eine ebene Oberfläche und erstreckt sich in den positiven x-∂∂y
= ∂∂z
= 0
Halbraum. Wir können uns die ebene Geometrie als Grenzfall der Zylindergeometrie für gro-ße R vorstellen.
52
Abb. C3: Einfach zu realisierende Magnetfeldanordnung
Abb. C.4: Die der Zylindergeometrie entsprechende ebene
Geometrie

β) Der SkineffektDer Skineffekt ist die Lösung des Diffusionsproblems für den Fall, daß an der Plasma- (bzw.Metall-) oberfläche ein Wechselfeld vorliegt. Diese Randbedingungen führen zu einer der we-nigen analytischen Lösungen der Diffusionsgleichung. Wir setzen die in Abb. C.4 skizzierteeindimensionale Geometrie mit
∂∂y
= ∂∂z
= 0, B;=
00
B(x, t)
voraus. Das Magnetfeld am Rande des Plasmas ist vorgegeben
B(0, t) = B0e iωt
Die Diffusionsgleichung hat dann die Form
d2B(x, t)dx2
= B //(x, t) = µ0σ•B (x, t)
Mit dem Ansatz
B(x, t) = B(x)e iωt
wird daraus B(x, t) // = µ0σiωB(x)
mit dem Ansatz B(x) = B0eαx
erhält man α = ± µ0σω i
Die Amplitude wird B0 gesetzt, um die Randbedingung bei x = 0 zu erfüllen. Um bei x → ∞ kein unendliches Feld zu erhalten, muß das Vorzeichen vom Realteil von α negativ sein:Re(α) < 0.Die Lösung wird damit
B = B0eiωt− µ0σω/2 x
e− µoσω/2 x
Der erste Faktor beschreibt eine Welle, die in das Plasma läuft, der zweite deren abnehmendeAmplitude. Die Amplitude nimmt exponentiell ab mit der Skintiefe d als 1/e Tiefe
(C.7)d = 1
µ0σω/2
53

Für Kupfer gilt die Faustformel
dmm = 66
ν/Hz
Ähnliche Erscheinungen spielen sich in den Eiskappen der Pole bezüglich der Wärmediffusi-on ab. An der Oberfläche ist die Temperatur im Jahresrhythmus periodisch.
γ) AbschätzungsformelAus Dimensionsgründen muß der funktionale Zusammenhang zwischen Eindringtiefe l0 und
charakteristischer Frequenz ω0 oder Zeit t0 für alle möglichen Diffusionsprobleme eines Ma-gnetfeldes in einem Plasma bis auf einen konstanten Faktor, von dem wir hoffen, daß er vonder Größenordnung 1 ist, die Form von Gl. (C.7) haben, z.B. für die Eindringzeit t0 bis zu ei-ner Tiefe l0
(C.8)t0 = l02µ0σ
Die Abschätzformel Gl. (C.8) kann auf eine etwas allgemeinere Art gewonnen werden: Wirschreiben die Diffusionsgleichung
∂2B∂x2
= µ0σ∂B∂t
dimensionslos, indem wir alle Größen auf charakteristische Größen des Experimentesbeziehen
B / = BBo
, x / = xxo
, t / = tt0
Wählen wir für B0, x0 typische Werte des Experimentes, so ergibt sich t0 zwangsläufig aus derForderung, daß die Dimensionen der Diffusionsgleichung rechts und links gleich sind
B0
l02
= µ0σB0
t0, t0 = l0
2µ0σ
Ersetzt man jetzt B, x und t durch ihre dimensionslosen Entsprechungen B', x', t', so hat dieDiffusionsgleichung eine von Orts-, Zeitskalen und speziellen Konstanten freie Form
∂2B /
∂x /2= ∂B /
∂t /
Von dieser Form würde man auch für numerische Berechnungen ausgehen. Wir stellen unsvor, wir hätten die dimensionslose Diffusionsgleichung gelöst. Für die Zeit, die das
54
Magnetfeld benötigt in eine Tiefe x' = 1 einzudringen, würde man vermutlich t' = 1 bis auf ei-ne Konstante der Größe 1 herausbekommen, da die Gleichung keine anderen Konstanten ent-hält. Umrechnen auf die ursprünglichen dimensionsbehafteten Größen führt sofort zu unsererAbschätzformel Gl. (C.8). Um diese für praktische Fälle anwenden zu können, benötigen wireine Abschätzung für die Leitfähigkeit. Unter Vorgriff auf Kap. E setzen wir für ein Plasmader Temperatur Te (in eV) unabhängig von der Teilchendichte
(C.9)σΩ−1m−1
≈ 1, 5
Te
eV
3/2
103
δ) BeispieleFür ein typisches Laborplasma mit Te = 100 eV und l0 = 0,01 m wird die Zeit, in der ein Ma-gnetfeld das Plasma durchdringt
tE = µ0σl02 = 4π ⋅ 10−7 ⋅ 1, 5 ⋅ 106 ⋅ 10−4 = 2 ⋅ 10−4 = 2 ⋅ 10−4s
Wenn man Zeiten betrachtet, die kürzer als 100 µs sind, kann das Magnetfeld nicht durch dasPlasma diffundieren, umgekehrt kann das Plasma als im Magnetfeld eingeschlossen betrach-tet werden.Bei einem großen Fusionsexperiment mit Te = 104 eV und l0 = 1 m ist diese Zeit 2 · 103 s. Be-obachtet wird im Tokamak t0 ~ 0,1 s. Man kann daraus folgern, daß die Gl. (C.9) die Leitfä-higkeit in einem Tokamakplasma nicht korrekt wiedergibt.Bei einem Himmelskörper der Größe und Leitfähigkeit der Sonne kommt man auf Eindring-zeiten, die der Größenordnung des Alters der Welt entsprechen. Man erkennt, daß die Frage,
ob ein Magnetfeld in einen Körper eindringt, von der gegenseitigen Größe von t0, l0, und σ ab-hängt. Bei sehr großen Objekten oder sehr kurzen Zeiten kann das Magnetfeld nicht durch einPlasma diffundieren, selbst wenn die Leitfähigkeit nicht besonders groß ist. Man kann einMagnetfeld in ein Plasma bringen, indem man es in der Entstehungsphase anlegt, während dieLeitfähigkeit gering ist. Bei genügend hoher Leitfähigkeit ist das Plasma dann in das Magnet-feld "eingefroren" d.h. die Magnetfeldlinien können sich nicht über das Plasma bewegen.
c) Magnetische ReynoldszahlDie Frage, wie weit ein Magnetfeld in einen Körper eindringt, wird durch die magnetischeReynoldszahl Rm beschrieben. Rm ist eine dimensionslose Zahl, die gleich dem Quadrat desVerhältnisses von typischer Länge der Anordnung zur Eindringtiefe ist. Setzt man z.B. dieFormel für den Skineffekt voraus, so ist
(C.10)Rm = µ0σωlo2
Bei einer Strömung eines Plasmas in einem Magnetfeld mit der Geschwindigkeit v = l0/t0 hatman
55
Rm =vl0µ0σ
Man gelangt zu der Reynoldszahl in der Hydrodynamik, indem man
µ0σ = 1η/ρ
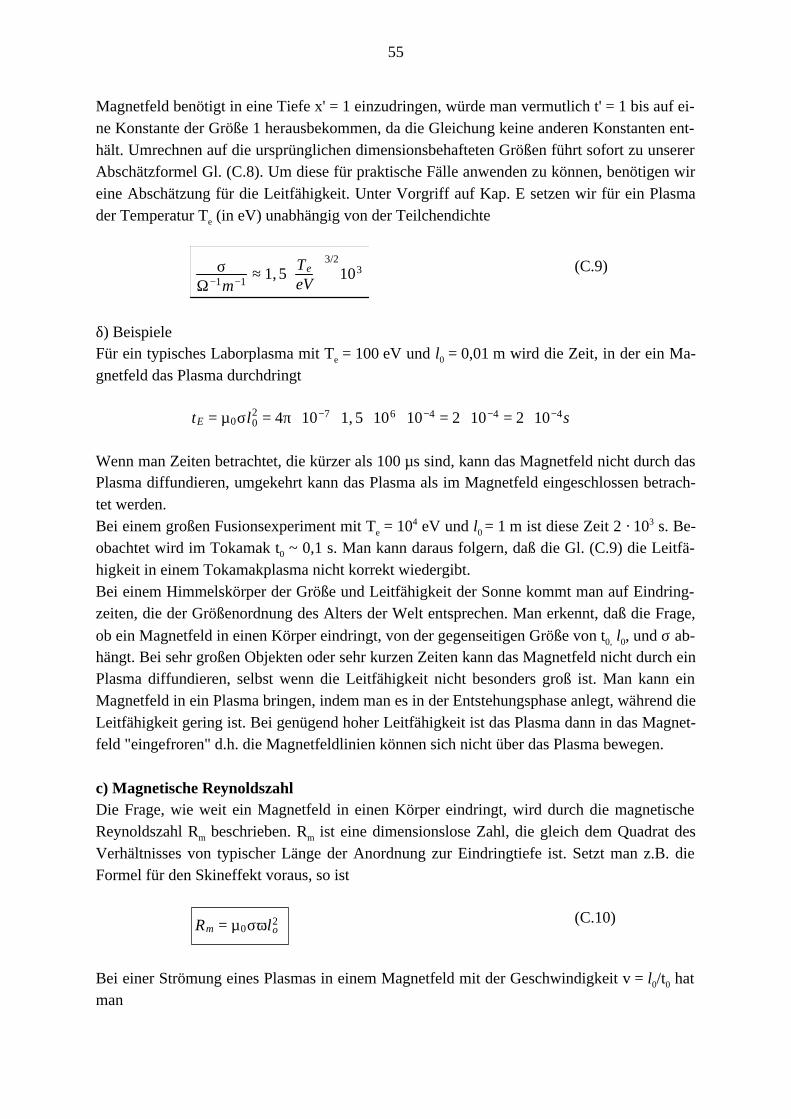
setzt. η ist die Viskosität und η/ρ die kinematische Viskosität. Eine andere mit der obigenDefinition Gl. (C.10) identische Interpretation der magnetischen Reynoldszahl besagt, daß siedas Verhältnis vom Magnetfeld durch Ströme im Plasma zum Vakuumfeld angibt. Abb. C.5zeigt z.B. ein magnetisches Dipolfeld, das von einem Plasma angeströmt wird. Im oberen Fallist Rm << 1, d.h. das Magnetfeld bleibt das Vakuumfeld, unten ist Rm ~ 1, d.h. das Magnetfeld
wird verzerrt.
Wenn man die Magnetfeldlinien in Abb. C.5 durch Isothermen in einer Flüssigkeitsströmung
ersetzt, übernimmt die Piclet Zahl die Rolle der magnetischen Reynoldszahl. Bei Rm>> 1 fin-det keine Diffusion statt. Die Materie ist an das Magnetfeld gebunden. Man sagt, das Magnet-feld ist eingefroren. Eine Flußröhre, d,h, eine Röhre, deren Oberfläche aus Magnetfeldliniengebildet wird, enthält immer die gleichen Teilchen. Dies ist ein Ergebnis, das wir schon im
Einteilchenmodell im stoßfreien Fall gewonnen hatten.
56
Abb. C.5: Bei Rm << 1(oben) bleibt das Vakuumfeld
ungestört. Bei Rm >> 1 (unten) verursachen Ströme im
Plasma eine starke Verzerrung des Vakuumfeldes.
Abb. C.6: Eine Flußröhre ist eine röhrenförmige Fläche, deren Mantel
Feldlinien bilden. Die Flußröhre enthält bei unendlicher Leitfähigkeit
immer die gleichen Teilchen.
Abb. C.7: Ein Plasmaball
wird aus der Sonnenober-
fläche ausgestoßen.
Man kann also in diesem Fall aus der Bewegung des Plasmas auf die Verformung des Ma-gnetfeldes schließen oder umgekehrt. Z.B. wird bei Eruptionen der Sonnenoberfläche Ma-gnetfeld mit dem Plasma mitgerissen. Die Feldlinien dehnen sich wie Gummibänder und rei-ßen schließlich ab, so daß sich ihre Topologie ändert (reconnection).
4. Gleichgewichta) GrundgleichungenUm Plasma durch Magnetfelder einzuschließen, muß zunächst einmal die Diffusion genü-gend klein sein, d.h. die Leitfähigkeit genügend groß. Darüber hinaus muß ein Gleichgewichtzwischen den Druckkräften des Plasmas und den magnetischen Kräften herrschen. Im Falledes Gleichgewichts ruht das Plasma, und alle Zeitableitungen verschwinden. Mit den Voraus-setzungen
v = 0, σ = ∞, ∂∂t
= 0
bleiben von den Grundgleichungen der MHD, Gl. (C.1) - (C.3) und den Maxwellgleichungenübrig
(C.11)j × B = ∇p
rotB = µ0j
Dies sind die Grundgleichungen für den magnetischen Einschluß. Alle grundlegenden theore-tischen und numerischen Untersuchungen basieren auf diesen Gleichungen. In der Gleichge-wichtstheorie für den Tokamak entwickelt man aus ihnen eine Differentialgleichung für dieFlußfunktion Ψ (r, z)
D(Ψ(r, z)) = 0
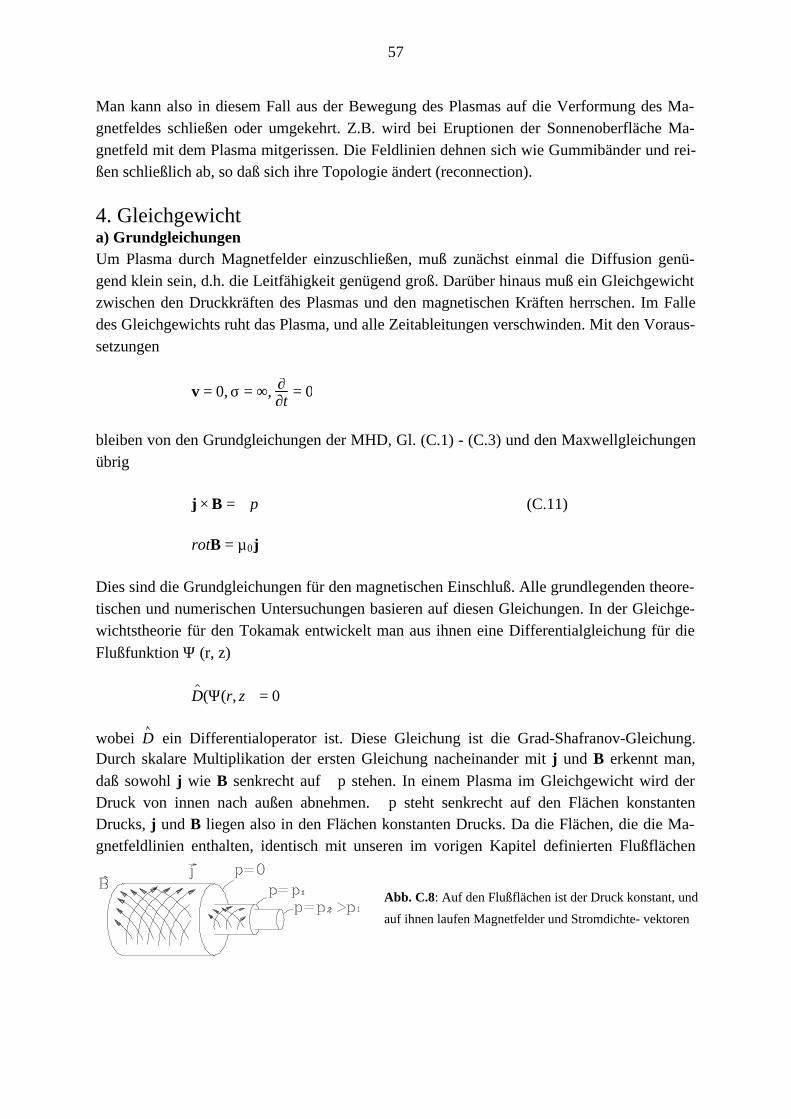
wobei ein Differentialoperator ist. Diese Gleichung ist die Grad-Shafranov-Gleichung.DDurch skalare Multiplikation der ersten Gleichung nacheinander mit j und B erkennt man,daß sowohl j wie B senkrecht auf ∇p stehen. In einem Plasma im Gleichgewicht wird derDruck von innen nach außen abnehmen. ∇p steht senkrecht auf den Flächen konstantenDrucks, j und B liegen also in den Flächen konstanten Drucks. Da die Flächen, die die Ma-gnetfeldlinien enthalten, identisch mit unseren im vorigen Kapitel definierten Flußflächen
57
Abb. C.8: Auf den Flußflächen ist der Druck konstant, und
auf ihnen laufen Magnetfelder und Stromdichte- vektoren
sind, folgt, daß auf den Flußflächen der Strom fließt, die magnetischen Feldlinien liegen undder Plasmadruck konstant ist. (Abb. C.8)
In typischen Einschlußexperimenten ist am Rand der Plasmadruck p = 0.
b) Magnetischer Druckα) FragestellungDie j x B Kraft in einem Plasma läßt sich im Gleichgewicht alleine aus dem Magnetfeldver-lauf ausrechnen. Dazu setzt man die erste Gleichung von Gl. (C.11) in die zweite ein, manerhält
∇p + 1µ0
(B × rotB) = 0
Wir folgern, daß wie ∇p eine Kraftdichte darstellt. Weiter unten werden wir se-1µ0
(B × rotB)
hen, daß man diesen Term durch Vektorumformungen in die Form
∇=P
bringen kann. ist ein Tensor, der die Dimension eines Druckes hat, und heißt Tensor des=P
magnetischen Druckes. Wir machen uns die Form und die Bedeutung des Drucktensors an
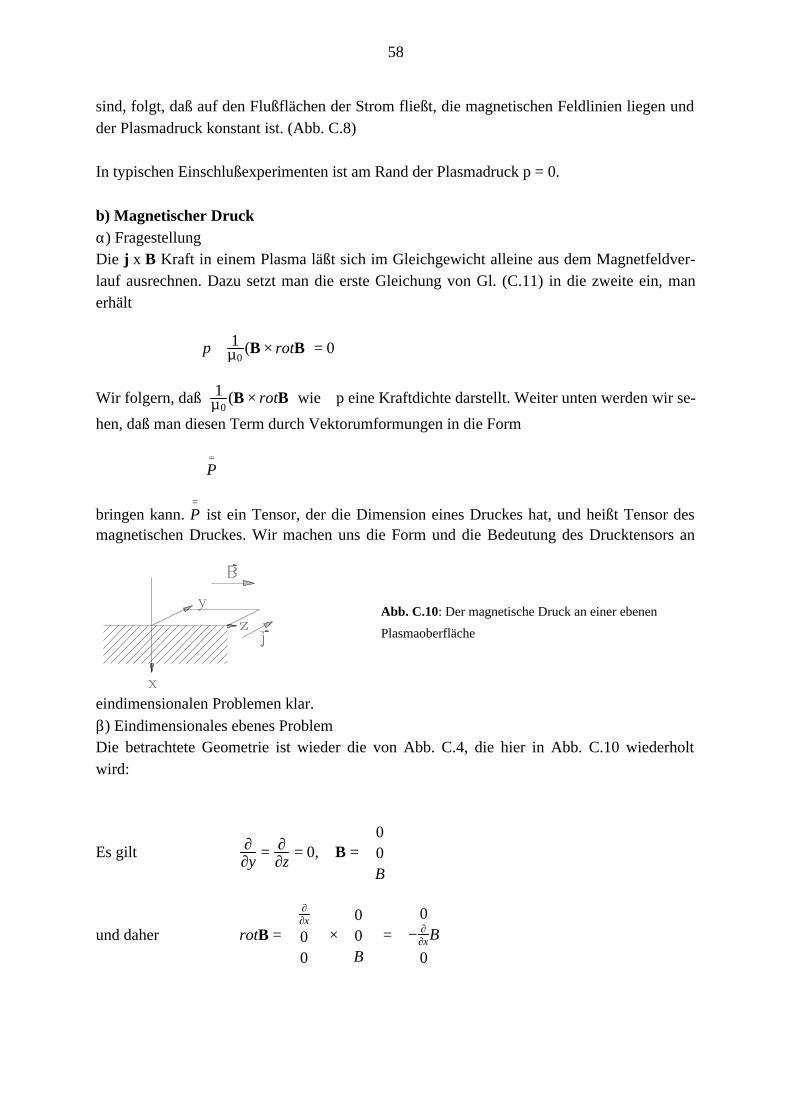
eindimensionalen Problemen klar.β) Eindimensionales ebenes ProblemDie betrachtete Geometrie ist wieder die von Abb. C.4, die hier in Abb. C.10 wiederholtwird:
Es gilt ∂∂y
= ∂∂z
= 0, B =
00B
und daher rotB =
∂∂x
00
×
00B
=
0− ∂
∂xB
0
58
Abb. C.10: Der magnetische Druck an einer ebenen
Plasmaoberfläche

B × rotB =
00B
×
0−∂B
∂x
0
=
B∂B∂x
00
= ∂∂x
B2
2
00
Man kann also, wie oben für den allgemeinen Fall behauptet, in der Gleichgewichtsgleichungden Term, der das Magnetfeld enthält, als Gradient eines Druckes schreiben
∂p∂x
+ ∂∂x
B2
2µ0
(C.12)pm = B2
2µ0
pm heißt der magnetische Druck.
γ) Der DrucktensorWir suchen einen Tensor P, für den gilt
−j×B= 1µ0
B × rotB = ∇=P
Zur Umformung des B x rot B Terms gehen wir von der Vektoridentität aus
B × (∇ × B) = 12
∇B2 − (B • ∇)B
Der zweite Term auf der rechten Seite wird umgeformt mit
∇ • (BB) = B(∇ • B) + (B • ∇)B
Der erste Term rechts fällt wegen fort. BB ist ein Tensorprodukt in Matrizen dar-∇ • B = 0stellbar durch
BB =
Bx
By
Bz
Bx By Bz
=
BxBx BxBy BxBz
ByBx ByBy ByBz
BzBx BzBy BzBz
Damit ist die Aufgabe, den Gradienten vorzuziehen erreicht
1µ0
B × rotB = 1µ0
12
∇B2 − ∇ • (BB)
Der erste Term in der Klammer muß lediglich mit der Einheitsmatrix multipliziert werden.Der Drucktensor hat dann die Form:
59
=P=
p + 1µ0
12B2 − B2
− 1µ0
BxBy − 1µ0
BxBz
− 1µ0
ByBx p + 1µ0
12B2 − By
2 − 1
µ0ByBz
− 1µ0
BzBx − 1µ0
BzBy p + 1µ0
12B2 − Bz
2
Durch Einführen eines lokalen Koordinatensystems, dessen z-Achse mit der Magnetfeldrich-tung zusammenfällt, vereinfacht sich der Tensor
C.13=P=
p + 12µ0
B2 0 0
0 p + 12µ0
B2 0
0 0 p − 12µ0
B2
Durch Multiplizieren mit einem Flächenelement und Gradientenbildung erhält man die Kraftin Richtung der Flächennormalen. Man erkennt, daß senkrecht zur Magnetfeldrichtung (x undy-Richtung) zum thermischen Druck ein Druck hinzukommt, in Magnetfeldrichtung (z-Rich-tung) ein Druck abgezogen wird. Man kann sich diese zusätzlichen Terme als Seitendruckund Längszug der Feldlinie vorstellen.
c) Einschluß eines zylindrischen Plasmas
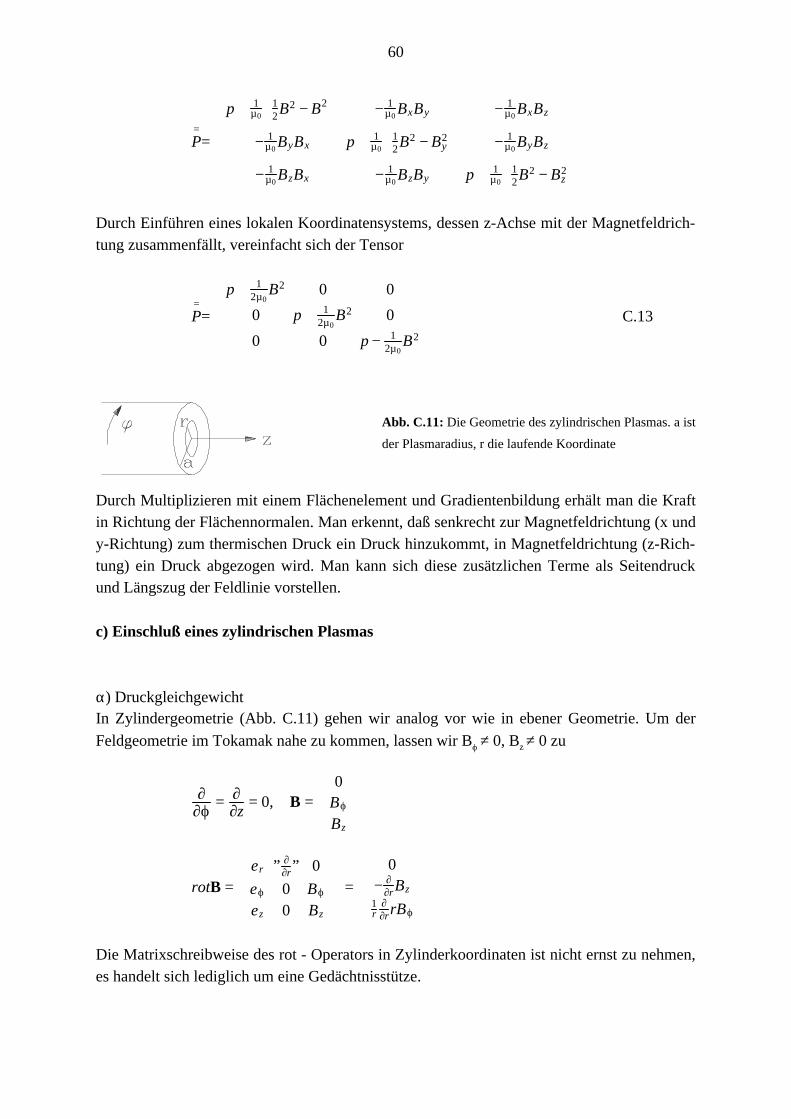
α) DruckgleichgewichtIn Zylindergeometrie (Abb. C.11) gehen wir analog vor wie in ebener Geometrie. Um der
Feldgeometrie im Tokamak nahe zu kommen, lassen wir Bϕ ≠ 0, Bz ≠ 0 zu
∂∂ϕ = ∂
∂z= 0, B =
0Bϕ
Bz
rotB =
er ” ∂∂r” 0
eϕ 0 Bϕ
ez 0 Bz
=
0− ∂
∂rBz1r
∂∂rrBϕ
Die Matrixschreibweise des rot - Operators in Zylinderkoordinaten ist nicht ernst zu nehmen,es handelt sich lediglich um eine Gedächtnisstütze.
60
Abb. C.11: Die Geometrie des zylindrischen Plasmas. a ist
der Plasmaradius, r die laufende Koordinate

0Bϕ
Bz
×
0− ∂
∂rBz1r
∂∂rrBϕ
=
Bϕ1r
∂∂rrBϕ + Bz
∂∂rBz
00
Die Gleichung für das Druckgleichgewicht lautet also
1µ0
Bϕ
∂∂r
Bϕ + 1r Bϕ
2 + Bz∂∂r
Bz + ∂
∂rp = 0
1µ0
∂∂r
12
Bϕ2 + ∂
∂r12
Bz2 + 1
r Bϕ2
+ ∂∂r
p = 0
Bϕ und Bz sind Funktionen des Radius.Man integriert über die Querschnittsfläche ( ) und führt eine partielle Integration∫0
ar2drdϕ
durch. Als Resultat ergibt sich eine Gleichung für das Druckgleichgewicht
(C.14)Bϕ(a)2
2µ0+ Bz(a)2
2µ0=
Bz(r)2
2µ0+ ⟨p⟩
Auf der linken Seite steht der Magnetfelddruck des gesamten Magnetfeldes am Plasmarand.Rechts steht der Mittelwert über den Querschnitt, z.B.
Bz(r)2 =∫0
a Bz2(r)rdrdϕπa2
Bemerkenswert ist, daß das poloidale Feld im Plasma keinen Beitrag liefert.
β) Der Parameter βBei Gültigkeit von Gl. C.14 definiert man
β =⟨p⟩
Ba2/2µ0
wobei . Nach C.14 ist dannBa2 = Bϕ
2 (a) + Bz2(a)
β = 1 − ⟨Bz2(r)⟩Ba
2
61
Abb. C.12: Bei β = 1 enthält ein Plasma im Gleichgewicht kein
Magnetfeld, bei β << 1 ist das Magnetfeld innerhalb des Plas-
mas fast so stark wie außerhalb
β = 1 heißt also . Das Plasma ist frei von Magnetfeld. Der magnetische Druck⟨Bz2(r)⟩ = 0
wirkt in der äußersten Randschicht. (Abb. C.12 oben)
β << 1 heißt, daß der innere Magnetfelddruck fast gleich dem äußeren ist. Bei vorgegebenemPlasmadruck <p> wird Ba am kleinsten bei β = 1. Da bei großen Einschlußexperimenten dieHerstellung des äußeren Magnetfeldes ein erheblicher Kostenfaktor ist, strebt man aus ökono-mischen Gründen ein möglichst großes β an. Andererseits unterstützt ein inneres Magnetfelddie Stabilität (s. Abschnitt f). Da das Stabilitätsproblem zunächst das gravierendste Problem
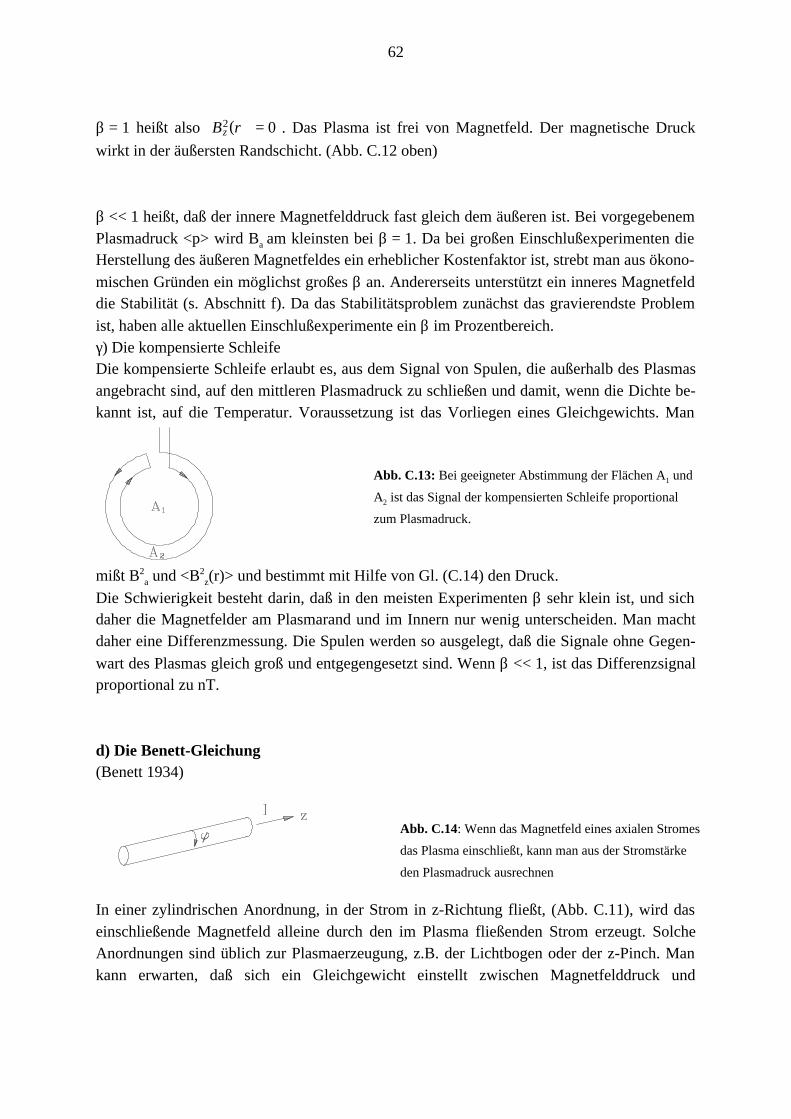
ist, haben alle aktuellen Einschlußexperimente ein β im Prozentbereich.γ) Die kompensierte SchleifeDie kompensierte Schleife erlaubt es, aus dem Signal von Spulen, die außerhalb des Plasmasangebracht sind, auf den mittleren Plasmadruck zu schließen und damit, wenn die Dichte be-kannt ist, auf die Temperatur. Voraussetzung ist das Vorliegen eines Gleichgewichts. Man
mißt B2a und <B2
z(r)> und bestimmt mit Hilfe von Gl. (C.14) den Druck.
Die Schwierigkeit besteht darin, daß in den meisten Experimenten β sehr klein ist, und sichdaher die Magnetfelder am Plasmarand und im Innern nur wenig unterscheiden. Man machtdaher eine Differenzmessung. Die Spulen werden so ausgelegt, daß die Signale ohne Gegen-
wart des Plasmas gleich groß und entgegengesetzt sind. Wenn β << 1, ist das Differenzsignalproportional zu nT.
d) Die Benett-Gleichung(Benett 1934)
In einer zylindrischen Anordnung, in der Strom in z-Richtung fließt, (Abb. C.11), wird daseinschließende Magnetfeld alleine durch den im Plasma fließenden Strom erzeugt. SolcheAnordnungen sind üblich zur Plasmaerzeugung, z.B. der Lichtbogen oder der z-Pinch. Mankann erwarten, daß sich ein Gleichgewicht einstellt zwischen Magnetfelddruck und
62
Abb. C.13: Bei geeigneter Abstimmung der Flächen A1 und
A2 ist das Signal der kompensierten Schleife proportional
zum Plasmadruck.
Abb. C.14: Wenn das Magnetfeld eines axialen Stromes
das Plasma einschließt, kann man aus der Stromstärke
den Plasmadruck ausrechnen
Plasmadruck, so daß man durch Vorgabe des Stroms das erreichbare n · T ausrechnen kann(Benett - Gleichgewicht).
Die Gleichgewichtsbedingung lautet hier
Bϕa2
2µ0= nkT
Das Amperesche Gesetz besagt
Bϕa =µ0I2πa
d.h.µ0
8π2a2I2 = nkT
kT =µ0
8π(nπa2)I2
nπa2 ist die Teilchendichte pro Länge, die sogenannte Liniendichte. Für einen Strom vonI = 105 A und eine Liniendichte nπa2 = 1019m-1 erhält man eine Temperatur von T = 25·106 K.Ströme von 105 A sind durch Kondensatorentladungen leicht zu erzeugen. Das Problem liegtin der mangelnden Stabilität des Plasmafadens (s. Abschnitt f).
e) Gleichgewicht im TorusMan behandelt getrennt das Gleichgewicht bezüglich kleinen (a) und großen (R) Radius.
Bezüglich kleinem Radius kann man in erster Näherung die Betrachtungen am Zylinder über-
tragen. Für ein typisches β = 0,1 ergibt sich aus der Gleichgewichtsbedingung
Ba2
2µ0= 10nkT = 20nekT
für typische Werte ne = 1020 m-3 und T = 108 K benötigt man B ~ 3 T. In JET hat das Toroidal-
feld eine Stärke von 3,4 T. Dies entspricht einem Druck von . DamitB2
µ0= 3 ⋅ 105Pa ≈ 3bar
verbunden sind gewaltige Probleme, nicht nur der Stromversorgung, sondern auch der
63
Abb. C.15: Kleiner und großer Radius im Torus
Festigkeit. Bei JET enthält die Toroidalfeldspule 380 t Kupfer, der Eisenkern des Transfor-mators zur Induzierung des toroidalen Stroms wiegt 1500 t. Die Leistung zur Speisung derToroidalfeld - Spulen beträgt 250 MW.Ein Plasmaring würde sich ohne weitere Maßnahmen ausdehnen. Jeder Stromring erfährt auf-grund der Tatsache, daß innen der Magnetfelddruck größer als außen ist, eine radial nach au-ßen wirkende Kraft. In die gleiche Richtung wirken die thermischen Kräfte. Man fügt daher
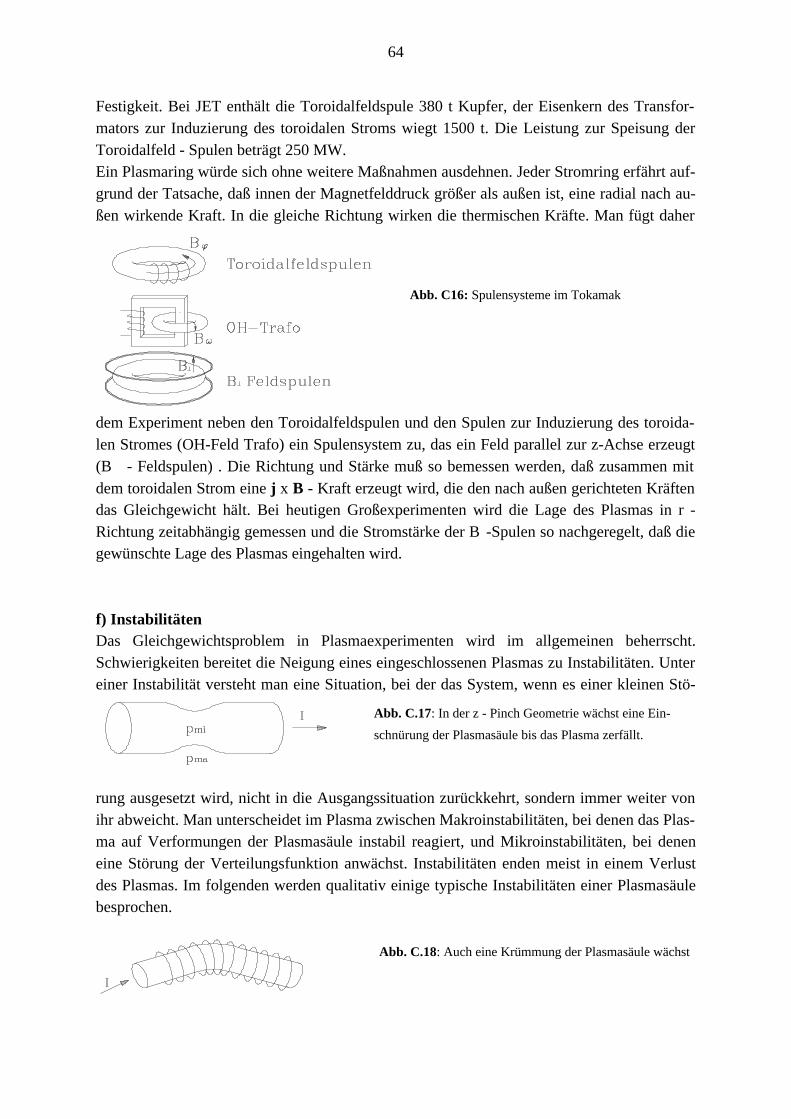
dem Experiment neben den Toroidalfeldspulen und den Spulen zur Induzierung des toroida-len Stromes (OH-Feld Trafo) ein Spulensystem zu, das ein Feld parallel zur z-Achse erzeugt(B⊥ - Feldspulen) . Die Richtung und Stärke muß so bemessen werden, daß zusammen mitdem toroidalen Strom eine j x B - Kraft erzeugt wird, die den nach außen gerichteten Kräftendas Gleichgewicht hält. Bei heutigen Großexperimenten wird die Lage des Plasmas in r -Richtung zeitabhängig gemessen und die Stromstärke der B⊥-Spulen so nachgeregelt, daß diegewünschte Lage des Plasmas eingehalten wird.
f) InstabilitätenDas Gleichgewichtsproblem in Plasmaexperimenten wird im allgemeinen beherrscht.Schwierigkeiten bereitet die Neigung eines eingeschlossenen Plasmas zu Instabilitäten. Untereiner Instabilität versteht man eine Situation, bei der das System, wenn es einer kleinen Stö-
rung ausgesetzt wird, nicht in die Ausgangssituation zurückkehrt, sondern immer weiter vonihr abweicht. Man unterscheidet im Plasma zwischen Makroinstabilitäten, bei denen das Plas-ma auf Verformungen der Plasmasäule instabil reagiert, und Mikroinstabilitäten, bei deneneine Störung der Verteilungsfunktion anwächst. Instabilitäten enden meist in einem Verlustdes Plasmas. Im folgenden werden qualitativ einige typische Instabilitäten einer Plasmasäulebesprochen.
64
Abb. C16: Spulensysteme im Tokamak
Abb. C.17: In der z - Pinch Geometrie wächst eine Ein-
schnürung der Plasmasäule bis das Plasma zerfällt.
Abb. C.18: Auch eine Krümmung der Plasmasäule wächst
α) "Sausage"-Instabilität
Bei einer Plasmasäule, durch die ein axialer Strom fließt, erhöht sich der Magnetfelddruck amPlasmarand, wenn dieser an einer Stelle eingeschnürt wird. Die Einschnürung wächst alsound das Plasma zerfällt wie eine Kette von Würsten, daher "Sausage"-Instabilität. Das Plasmakann durch ein inneres Magnetfeld Bz stabilisiert werden. Wegen der Flußkonstanz ist dann
Bzr2 = const, d.h. das innere Feld geht mit das äußere mit , so daß bei einerB i ∼ 1
r2Ba ∼ 1
rEinschnürung der innere Magnetfelddruck stärker zunimmt als der äußere.
β) Kink-InstabilitätBei einer Krümmung einer Plasmasäule erhält man - wie in Abb. C.18 veranschaulicht - eineErhöhung des Magnetfeldes an der Innenseite des Knicks. D.h. auch hier verstärkt sich derEffekt selbst. Ähnlich wie bei der Sausage-Instabilität wirkt ein inneres Feld stabilisierend.Man erkennt, daß ein z - Pinch außerordentlich instabil ist und eine Verschraubung der Feld-
linien, wie wir sie vom axialsymmetrischen Torus her kennen, stabilisierend wirkt.Bei der Kompression einer Plasmasäule durch ein äußeres Magnetfeld liegt eine ähnliche Si-tuation vor wie bei der von Flüssigkeiten her bekannten Rayleigh-Taylor Instabilität, die auf-tritt, wenn man über eine relativ leichte Flüssigkeit eine schwere schichtet. Eine zylindrischeSäule verformt sich dann sternförmig. Man nennt auch diese Instabilität Rayleigh-TaylorInstabilität.
5. Anwendungen aus der Dynamika) Kompressions Alfvén-Welle
65
Abb. C.19: Querschnitt eines Plasmas mit Rayleigh - Tay-
lor Instabilität
Abb. C.20: Anregungsgeometrie für die Kompressions-
und die Scherwelle.
Als Anwendung eines dynamischen Vorgangs, bei dem beide Gleichungen (C.5) und (C.6)wesentlich sind, wird die Kompressions-Alfvén betrachtet. Eine systematische Behandlungder Plasmawellen erfolgt im nächsten Kapitel.
α) GeometrieEs gibt zwei Typen von Alfvénwellen: die Kompressions- und die Scherwelle. Im Labor regtman sie in zylindrischer Geormetrie wie in Abb. C.20 an:
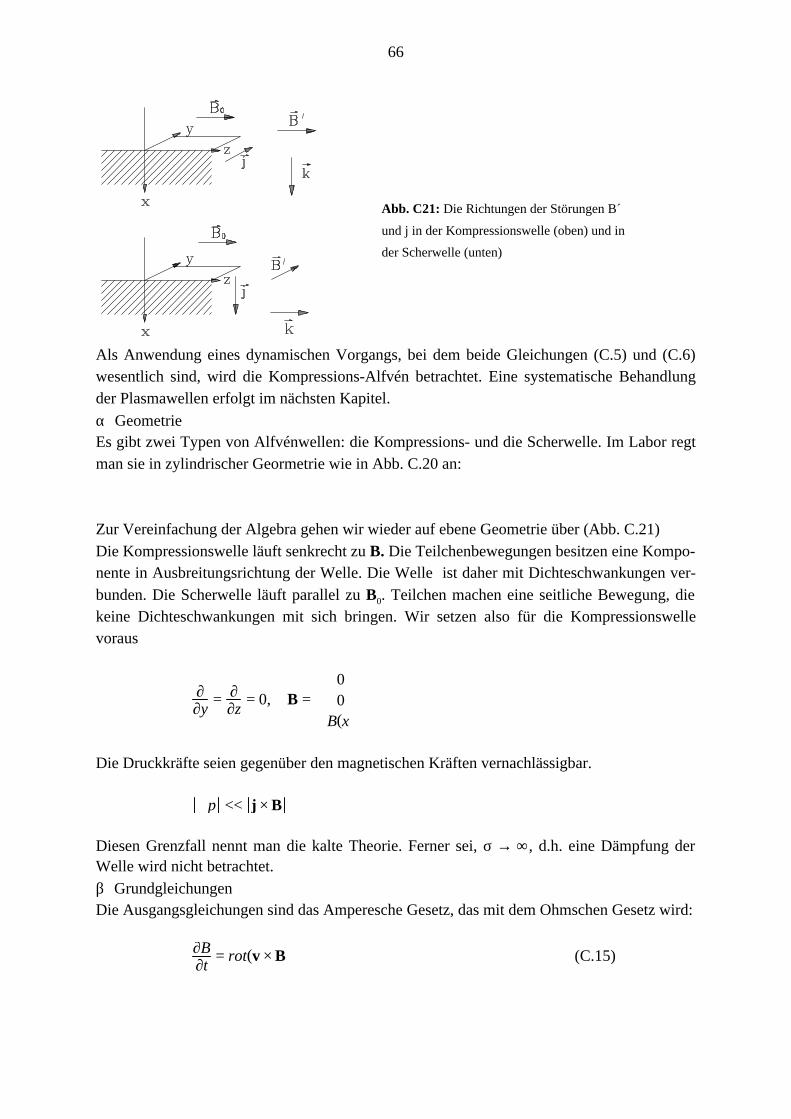
Zur Vereinfachung der Algebra gehen wir wieder auf ebene Geometrie über (Abb. C.21)Die Kompressionswelle läuft senkrecht zu B. Die Teilchenbewegungen besitzen eine Kompo-nente in Ausbreitungsrichtung der Welle. Die Welle ist daher mit Dichteschwankungen ver-bunden. Die Scherwelle läuft parallel zu B0. Teilchen machen eine seitliche Bewegung, diekeine Dichteschwankungen mit sich bringen. Wir setzen also für die Kompressionswellevoraus
∂∂y
= ∂∂z
= 0, B =
00
B(x)
Die Druckkräfte seien gegenüber den magnetischen Kräften vernachlässigbar.
∇p << j × B
Diesen Grenzfall nennt man die kalte Theorie. Ferner sei, , d.h. eine Dämpfung derσ → ∞Welle wird nicht betrachtet.β) GrundgleichungenDie Ausgangsgleichungen sind das Amperesche Gesetz, das mit dem Ohmschen Gesetz wird:
(C.15)∂B∂t
= rot(v × B)
66
Abb. C21: Die Richtungen der Störungen B´
und j in der Kompressionswelle (oben) und in
der Scherwelle (unten)

und die Euler-Gleichung
(C.16)ρ
∂v∂t
+ (v • ∇)v = j × B = 1
µ0rotB × B
B(x) und v(x) sind nur von x abhängig.γ) LinearisierungDie Ausgangsgleichungen sind nicht linear. Wir können also eine einfache Lösung nur erwar-ten, wenn wir linearisieren, d.h. wir betrachten alle Größen als zusammengesetzt aus einemorts- und zeitunabhängigen Teil und einem viel kleineren zeitlich veränderlichen Teil, dessenx,t - Abhängigkeit es zu berechnen gilt.
B = B0 + εB(x, t) (εB << B0)
...ρ = ρ0 + ερ(x, t)
v = ;εv(x, t)
v0 = 0, da die Flüssigkeit im Mittel ruhen soll. Gl. C.15 wird dann z.B.
ε∂B∂t
= εrot(v × B0) + ε2rot(v × B)
Terme mit ε2 werden weggelassen. Die Grundgleichungen haben also die Form
C.15 ∂B∂t
= rot(v × B0)
C.16 ρ0∂v∂t
= 1µ0
(rotB) × B0
δ) WellengleichungIn Komponenten
rotB =
∂∂x
00
×
00B
=
0− ∂
∂xB
0
rotB × B0 =
0− ∂
∂xB
0
×
00
B0
=
−B0∂∂xB
00
Aus der zweiten Gleichung folgt, daß und da v keine konstanten Terme enthalten soll∂v∂t
auch v nur eine r-Komponente besitzt:
67

(v × B0) =
v00
×
00
B0
=
0−vB0
0
=
00
−B0∂∂xv
Damit werden die Gleichungen
(C.15): ∂B∂t
= −B0∂∂x
v
(C.16): ρ0∂v∂t
= − 1µ0
B0∂B∂x
Durch Ableitung der ersten nach t, der zweiten nach x wird v´ eliminiert
∂2B∂t2
=B0
2
µ0ρ∂2B∂x2
Es ergibt sich also eine Wellengleichung für eine dispersionsfreie Welle, die in x-Richtung(senkrecht zum Magnetfeld) mit einer Phasengeschwindigkeit
vA =B0
2
µ0ρ
der sogenannten Alfvéngeschwindigkeit läuft. Aus der Kontinuitätsgleichung
•ρ +div(ρv) = 0
•ρ +ρ0
∂v∂x
= 0
folgt, da , daß die Dichte sich zeitlich ändert. Es handelt sich also um eine Kompressi-∂v∂x
≠ 0
onswelle. Den Ausbreitungsmechanismus veranschaulichen wir uns mit der Schallwelle. DenSchalldruck nimmt hier der magnetische Druck ein.
b) Der MHD Generator
68
Abb. C.22: Im MHD - Generator fließt eine leitfähige
Flüssigkeit durch ein Magnetfeld. Seitlich kann Strom
abgenommen werden.
Wir gehen von homogenen E und B-Feldern und durch äußeren Druck vorgegebener Strö-mungsgeschwindigkeit aus. Die Betriebsbedingungen hängen von der Belastung im äußerenStromkreis ab. Für endliche Leitfähigkeit sind im stationären Fall die Grundgleichungen
jσ = E + v × B
ρ(v • ∇)v = −∇p + j × B
rotB = µ0j
Im Leerlauf (j = 0) erhält man das Raumladungsfeld E aus der ersten Gleichung.
E + v × B = 0
den notwendigen Druckgradienten aus der zweiten:
(v • ∇)v = −∇p
Für Kurzschluß wird E = 0.
jσ = v × B
ergibt den Kurzschlußstrom. Die zweite Gleichung liefert wieder den notwendigen Druckgra-dienten. Der MHD Generator dient zur Direktumwandlung von mechanischer Energie inelektrische.
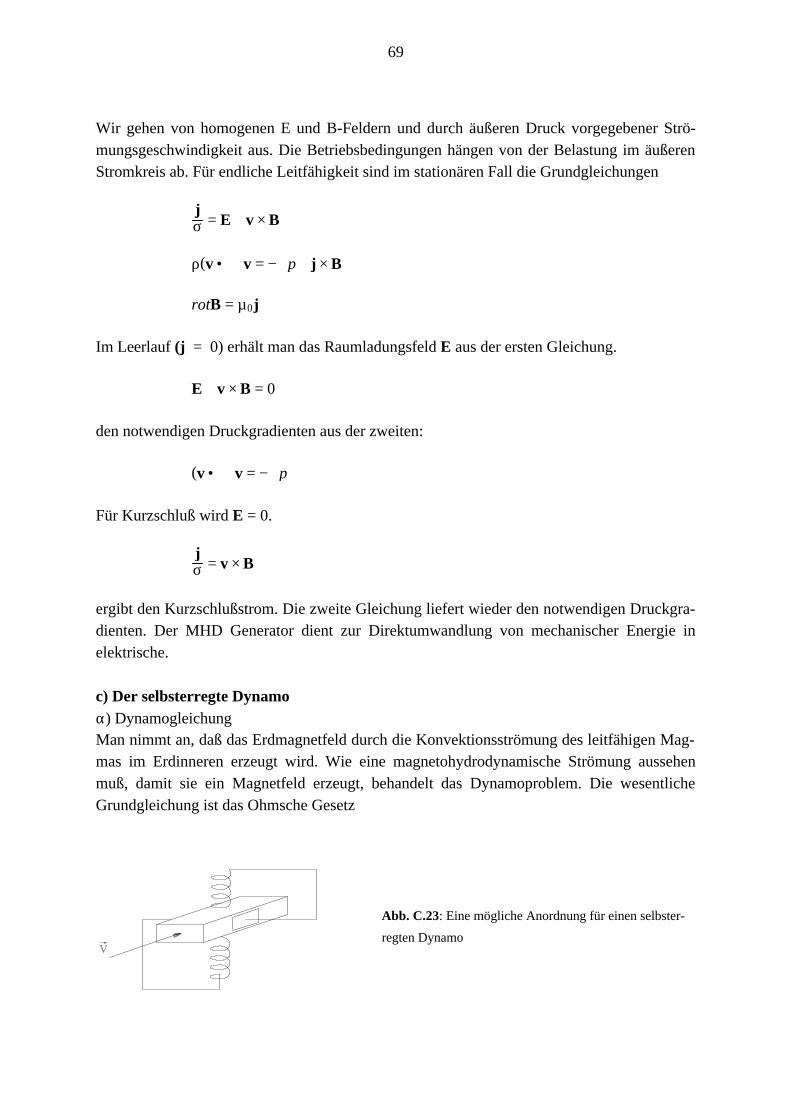
c) Der selbsterregte Dynamoα) DynamogleichungMan nimmt an, daß das Erdmagnetfeld durch die Konvektionsströmung des leitfähigen Mag-mas im Erdinneren erzeugt wird. Wie eine magnetohydrodynamische Strömung aussehenmuß, damit sie ein Magnetfeld erzeugt, behandelt das Dynamoproblem. Die wesentlicheGrundgleichung ist das Ohmsche Gesetz
69
Abb. C.23: Eine mögliche Anordnung für einen selbster-
regten Dynamo
jσ = E + v × B
Man bildet hiervon die Rotation, setzt ein und beachtet, daß im stationä-j = 1µ0
rotB ∂B∂t
= 0
ren Zustand. Die Grundgleichung hat dann die Form
1µ0σ∇2B + rot(v × B) = 0
Man nennt dies die Dynomogleichuung. Sie erlaubt bei gegebenem v B auszurechnen. Eineeinfache Geometrie für einen rückgekoppelten Dynamo zeigt Abb. C.23. Er beruht auf demPrinzip des MHD Generators.Das Prinzip des Erddynamos ist heute im wesentlichen verstanden. Wichtig ist die spiraligeStruktur des Geschwindigkeitsfeldes unter dem Einfluß der Corioliskraft. Interessant ist, daßselbsterregte Dynamos ein Anfangsfeld benötigen, das sie dann verstärken. Das Anfangsfeldkann auf sehr kleinen Schwankungen beruhen. Wenn ein Dynamo erlischt, hängt die entste-hende Feldrichtung also vom Zufall ab.
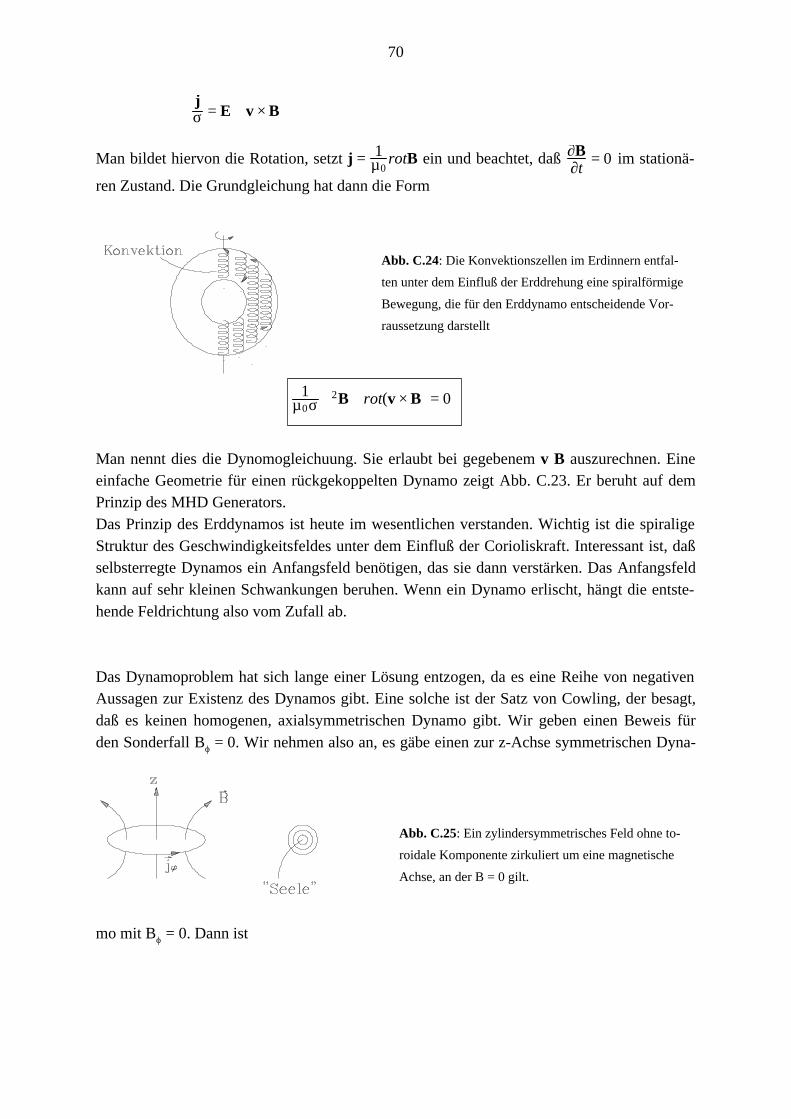
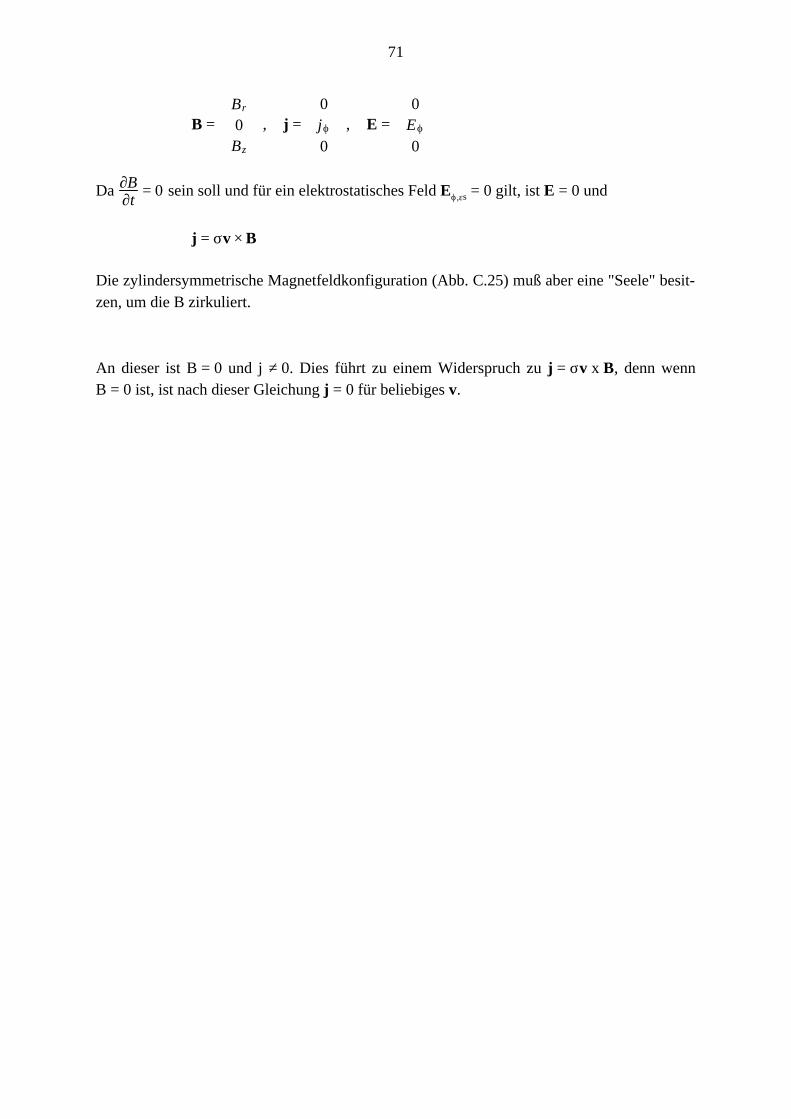
Das Dynamoproblem hat sich lange einer Lösung entzogen, da es eine Reihe von negativenAussagen zur Existenz des Dynamos gibt. Eine solche ist der Satz von Cowling, der besagt,daß es keinen homogenen, axialsymmetrischen Dynamo gibt. Wir geben einen Beweis fürden Sonderfall Bϕ = 0. Wir nehmen also an, es gäbe einen zur z-Achse symmetrischen Dyna-
mo mit Bϕ = 0. Dann ist
70
Abb. C.24: Die Konvektionszellen im Erdinnern entfal-
ten unter dem Einfluß der Erddrehung eine spiralförmige
Bewegung, die für den Erddynamo entscheidende Vor-
raussetzung darstellt
Abb. C.25: Ein zylindersymmetrisches Feld ohne to-
roidale Komponente zirkuliert um eine magnetische
Achse, an der B = 0 gilt.
B =
Br
0Bz
, j =
0jϕ
0
, E =
0Eϕ
0
Da sein soll und für ein elektrostatisches Feld Eϕ,εs = 0 gilt, ist E = 0 und∂B∂t
= 0
j = σv × B
Die zylindersymmetrische Magnetfeldkonfiguration (Abb. C.25) muß aber eine "Seele" besit-zen, um die B zirkuliert.
An dieser ist B = 0 und j ≠ 0. Dies führt zu einem Widerspruch zu j = σv x B, denn wennB = 0 ist, ist nach dieser Gleichung j = 0 für beliebiges v.
71
![Die Untersuchung der Zerfallsrate und der ...philipsen/theses/alikhani...Der β−Zerfall konnte zun¨achst gut durch die Fermi-Theorie beschrieben werden [4][12][13]. In dieser Theorie](https://static.fdocument.org/doc/165x107/61289eb387b1fe0e690fc1e6/die-untersuchung-der-zerfallsrate-und-der-philipsenthesesalikhani-der-azerfall.jpg)












![Die große Zusammenschau…. - ... · Lewis-Symbole ↔ Beschreibung durch Valenzelektronen z.B. Schwefel: Elektronenkonfiguration [Ne] 3s2 3p4 vgl. PSE: besondere Stabilität der](https://static.fdocument.org/doc/165x107/5cfd5c9f88c993f90b8d8858/die-grosse-zusammenschau-lewis-symbole-beschreibung-durch-valenzelektronen.jpg)




