Cosinus et sinus d'une somme et d'une différenceet...
2
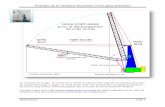
Décombre d'une première S – Cosinus et sinus d'une somme et d'une différence...et conséquences - Un doc de Jérôme ONILLON Page 1 sur 2 Cosinus et sinus d'une somme Dans tout ce qui suit, α et β sont deux réels quelconques. Dans ce premier paragraphe, nous allons chercher à exprimer les cosinus et sinus de la somme α+β en fonction de ceux de α et β. Pour y parvenir, transportons-nous dans le plan que nous supposons muni d'un repère orthonormé direct ( ) O; , i j , et plus précisément plaçons-nous sur le cercle trigonométrique. Sur ce dernier, nous définissons les points suivants : A est le point du cercle trigonométrique associé au réel α. Donc une mesure de l'angle orienté ( ) ,OA i est α. B est l'image du point A par la rotation de centre O et d'angle β. Donc une mesure de l'angle orienté ( ) ( ) ( ) ,OB ,OA OA, OB = + i i est α+β . C est l'image du point A par la rotation de centre O et d'angle 2 π . Donc une mesure de l'angle orienté ( ) OA, OC est 2 π . Et une mesure de l'angle orienté ( ) ( ) ( ) ,OC ,OA OA, OC = + i i est 2 π α+ . Plaçons-nous dans le repère orthonormé direct ( ) O; , i j . Dans celui-ci : Le point A étant associé au réel α sur le cercle trigonométrique, il a pour coordonnées ( ) ( ) ( ) cos ;sin α α . Donc ( ) ( ) OA cos sin = α× + α× i j . B qui est associé au réel α+β , a pour coordonnées ( ) ( ) ( ) cos ;sin α+β α+β . Donc ( ) ( ) OB cos sin = α+β × + α+β × i j . C associé au réel 2 π α+ , a pour coordonnées cos ;sin 2 2 π π α+ α+ . Donc ( ) ( ) OC cos sin sin cos 2 2 π π = α+ × + α+ × =− α× + α× i j i j Changeons de repère ! Plaçons-nous dans le repère orthonormé direct ( ) O;OA,OC . Dans le repère polaire associé ( ) O; OA , le point B a pour coordonnées polaires ( ) 1; β . En effet, le vecteur OB a pour norme 1 et une mesure de l'angle orienté ( ) OA, OB est β. Il vient alors : () () ( ) () () ( ) ( ) () ( ) Or OA et OC ont été exprimés en fonction de et OA OB 1 cos OA sin OC cos OA sin OC cos cos sin sin sin = × β× + β× = β× + β× = β× α× + α× + β×− α i j i j ( ) () ( ) () ( ) () ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) () ( ) ( ) OC cos cos .cos cos .sin sin . sin sin .cos cos .cos sin .sin cos .sin sin .cos × + α× = β α× β α× + β − α × + β α× β α− α β × + α β+ α β × i j i+ j i j = i j Donc, dans le repère ( ) O; , i j , les coordonnées du point ( ) ( ) ( ) B cos ;sin α+β α+β s'écrivent aussi : ( ) ( ) ( ) () ( ) ( ) ( ) ( ) () ( ) cos sin cos .cos sin .sin ;cos .sin sin .cos α+β α+β α β− α β α β+ α β Nous venons d'obtenir les formules que nous recherchions ! Théorème : cosinus et sinus d'une somme (formules d'addition) Pour tous réels α et β, nous avons : ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) () cos cos .cos sin .sin sin sin .cos cos .sin α+β = α β− α β α+β = α β+ α β A partir de ces deux formules, nous pouvons trouver celles donnant les cosinus et sinus d'une différence. Car soustraire, c'est ajouter l'opposé ! Ainsi : ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) () ( ) ( ) () ( ) () Car cosinus est paire et sinus impaire... cos cos cos .cos sin .sin cos .cos sin . sin cos .cos sin .sin α−β = α+ −β = α −β − α −β = α β− α − β = α β+ α β ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) () ( ) ( ) ( ) ( ) ( ) ( ) () Car cosinus est paire et sinus impaire... sin sin sin .cos cos .sin sin .cos cos . sin sin .cos cos .sin α−β = α+ −β = α −β + α −β = α β+ α − β = α β− α β O A B C ⊕ ⊕ ⊕ i j β α ( ) cos α+β ( ) sin α+β ( ) cos β ( ) sin β
-
Upload
nguyennguyet -
Category
Documents
-
view
217 -
download
0
Transcript of Cosinus et sinus d'une somme et d'une différenceet...

Décombre d'une première S – Cosinus et sinus d'une somme et d'une différence...et conséquences - Un doc de Jérôme ONILLON Page 1 sur 2
Cosinus et sinus d'une somme
Dans tout ce qui suit, α et β sont deux réels quelconques. Dans ce premier paragraphe, nous allons chercher à exprimer les cosinus et sinus de la
somme α +β en fonction de ceux de α et β. Pour y parvenir, transportons-nous dans le plan que nous supposons muni d'un repère
orthonormé direct ( )O; ,i j� �
, et plus précisément plaçons-nous sur le cercle
trigonométrique. Sur ce dernier, nous définissons les points suivants :
� A est le point du cercle
trigonométrique associé au réel α. Donc une mesure de l'angle orienté
( ),OAi�����
est α.
� B est l'image du point A par la
rotation de centre O et d'angle β. Donc une mesure de l'angle orienté
( ) ( ) ( ),OB ,OA OA,OB= +i i���� ���� ���� ����� �
est α +β . � C est l'image du point A par la
rotation de centre O et d'angle 2
π.
Donc une mesure de l'angle orienté
( )OA,OC���� ����
est 2
π.
Et une mesure de l'angle orienté ( ) ( ) ( ),OC ,OA OA,OC= +i i���� ���� ���� ����� �
est 2
πα + .
Plaçons-nous dans le repère orthonormé direct ( )O; ,i j� �
. Dans celui-ci :
� Le point A étant associé au réel α sur le cercle trigonométrique, il a pour
coordonnées ( ) ( )( )cos ;sinα α . Donc ( ) ( )OA cos sin= α × + α ×i j���� � �
.
� B qui est associé au réel α +β , a pour coordonnées ( ) ( )( )cos ;sinα +β α +β .
Donc ( ) ( )OB cos sin= α +β × + α +β ×i j���� � �
.
� C associé au réel 2
πα + , a pour coordonnées cos ;sin
2 2
π π α + α +
.
Donc ( ) ( )OC cos sin sin cos2 2
π π = α + × + α + × = − α × + α ×
i j i j
���� � � � �
Changeons de repère ! Plaçons-nous dans le repère orthonormé direct ( )O;OA,OC���� ����
.
Dans le repère polaire associé ( )O;OA����
, le point B a pour coordonnées polaires ( )1;β .
En effet, le vecteur OB����
a pour norme 1 et une mesure de l'angle orienté ( )OA,OB���� ����
est β.
Il vient alors :
( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( )Or OA et OC ont été exprimés en fonction de et
OA
OB 1 cos OA sin OC cos OA sin OC
cos cos sin sin sin
= × β × + β × = β × + β ×
= β × α × + α × + β × − α
i j
i j
���� ���� � �
����
���� ���� ���� ���� ����
��������������������
� �
������������������
( )
( ) ( ) ( ) ( ) ( ) ( )( ) ( ) ( )( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )
OC
cos
cos .cos cos .sin sin . sin sin .cos
cos .cos sin .sin cos .sin sin .cos
× + α ×
= β α × β α × + β − α × + β α ×
β α − α β × + α β + α β ×
i j
i + j i j
= i j
����
� �
��������������������
� � � �
� �
Donc, dans le repère ( )O; ,i j� �
, les coordonnées du point ( ) ( )( )B cos ;sinα +β α +β
s'écrivent aussi :
( ) ( ) ( ) ( )( )
( ) ( ) ( ) ( )( )cos sin
cos .cos sin .sin ;cos .sin sin .cos
α+β α+β
α β − α β α β + α β ����������������������� �����������������������
Nous venons d'obtenir les formules que nous recherchions !
Théorème : cosinus et sinus d'une somme (formules d'addition)
Pour tous réels α et β, nous avons :
( ) ( ) ( ) ( ) ( )( ) ( ) ( ) ( ) ( )
cos cos .cos sin .sin
sin sin .cos cos .sin
α +β = α β − α β
α +β = α β + α β
A partir de ces deux formules, nous pouvons trouver celles donnant les cosinus et sinus
d'une différence. Car soustraire, c'est ajouter l'opposé ! Ainsi :
( ) ( )( ) ( ) ( ) ( ) ( )( ) ( ) ( ) ( )( ) ( ) ( ) ( ) ( )
Car cosinus est paire et sinus impaire...
cos cos cos .cos sin .sin
cos .cos sin . sin cos .cos sin .sin
α −β = α + −β = α −β − α −β
= α β − α − β = α β + α β��������������������������
�
( ) ( )( ) ( ) ( ) ( ) ( )( ) ( ) ( ) ( )( ) ( ) ( ) ( ) ( )Car cosinus est paire et sinus impaire...
sin sin sin .cos cos .sin
sin .cos cos . sin sin .cos cos .sin
α −β = α + −β = α −β + α −β
= α β + α − β = α β − α β��������������������������
�
O
A
B
C ⊕⊕⊕⊕
i�
j�
β
α
( )cos α +β
( )sin α +β
( )cos β ( )sin β

Décombre d'une première S – Cosinus et sinus d'une somme et d'une différence...et conséquences - Un doc de Jérôme ONILLON Page 2 sur 2
Théorème : cosinus et sinus d'une différence
Pour tous réels α et β, nous avons :
( ) ( ) ( ) ( ) ( )( ) ( ) ( ) ( ) ( )
cos cos .cos sin .sin
sin sin .cos cos .sin
α −β = α β + α β
α −β = α β − α β
En s'appuyant sur ces formules et les valeurs remarquables des fonctions
trigonométriques, nous pouvons calculer les valeurs des cosinus et sinus de 12 3 4
π π π= − .
cos cos cos .cos sin .sin12 3 4 3 4 3 3
1 2 3 2 2 6
2 2 2 2 4
π π π π π π π = − = +
+= × + × =
�
sin sin sin .cos sin .cos12 3 4 3 4 3 3
3 2 1 2 6 2
2 2 2 2 4
π π π π π π π = − = −
−= × − × =
�
Formules de duplication des cosinus et sinus
On appelle ainsi les formules des cosinus et sinus du double. Pour tout réel α, nous avons :
� ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )2 2cos 2. cos cos .cos sin .sin cos sin α = α +α = α α − α α = α − α
De plus, comme ( ) ( )2 2cos sin 1 α + α = , alors il vient :
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
2 2 2
2 2 2
cos 2. 1 sin sin 1 2 sin
cos 2. cos 1 cos 2 cos 1
α = − α − α = − × α
α = α − − α = × α −
� ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )sin 2. sin sin .cos cos .sin 2.sin .cosα = α +α = α α + α α = α α
Théorèmes : formules de duplication des sinus et cosinus
Pour tout réel α, nous avons :
( ) ( ) ( ) ( ) ( )2 2 2 2cos 2. cos sin 2 cos 1 1 2 sinα = α − α = × α − = − × α
( ) ( ) ( )sin 2. 2.sin .cosα = α α
Des deux dernières formules de duplication du cosinus, on déduit :
Théorème : deux formules pour déterminer les cosinus et sinus de la moitié
Pour tout réel α, nous avons :
( ) ( )2 1 cos 2.cos
2
+ αα = ( ) ( )2 1 cos 2.
sin2
− αα =
Avec ces deux formules, nous pouvons déterminer les cosinus et sinus de 8
πα = .
�
22 2 21 cos 2 1 cos 1
2 28 4 2 2cos8 2 2 2 2 4
π π ++ × + + π + = = = = =
�
22 2 21 cos 2 1 cos 1
2 28 4 2 2sin8 2 2 2 2 4
π π −− × − − π − = = = = =
Comme 8
π appartient à l'intervalle 0;
2
π
, alors ses cosinus et sinus sont positifs. Ainsi :
2 2cos
8 4
π + =
2 2sin
8 4
π − =
Tangentes d'une somme, d'une différence et d'un double
Pour tous réels α et β non congrus à 2
π modulo π (ainsi que leur somme), nous avons:
( ) ( )( )
( ) ( ) ( ) ( )( ) ( ) ( ) ( )
( ) ( )( ) ( )
( ) ( )( ) ( )
( ) ( )( ) ( )
( ) ( )( ) ( )
( )( )
( )( )
( )( ) ( )
( ) ( )( ) ( )
sin sin .cos cos .sin
cos cos .cos sin .sin
sin .cos cos .sin sin sin
cos .cos cos .cos cos cos
cos .cos sin .sin sin sin(b)1
cos .cos cos
tan
tan tan
1 ta
.cos cos
n t
cos
an
α +β α β + α β= =
α +β α β − α β
α β α β α β+ +
α β α β α β= = =
α β α β α− − ×
α β α β α
α +β
α + β
− α ×
β
β
On en déduit alors :
� ( ) ( )( ) ( ) ( )( ) ( )
( ) ( )( ) ( )
Car tangente est une fonction impaire
tan tantan
1 tan tan
tan tantan
1 tan tan
α + −β= α + −β = =
− α × −β
α − βα −β
+ α × β��������������������������������
� ( ) ( ) ( ) ( )( ) ( )
( )( )2
tan tantan
1 tan tan
2 tantan 2.
1 tan
α + α= α +α = =
−
× α
−α × αα
α
On divise numérateur
et dénominateur par cos(a).cos(b)