Controls Based Q Measurement Report
20
π 2 5 * 10 4 ± 10 4 π 2 8 * 10 5 ± 10 5 8 * 10 5 ± 10 5
-
Upload
louis-gitelman -
Category
Documents
-
view
17 -
download
1
Transcript of Controls Based Q Measurement Report

Project Report: A Control Based System of
Mechanical Loss Measurement for High Quality
Factor Oscillators
Louis Gitelman
11/10/2015
1 Introduction
In this project a controls based system of measuring the quality factor or Q of anoscillator was developed. This system works by locking the phase between theoscillator's exciter and normal mode to π
2 and locking the oscillator's amplitudewith control loops. This allows one to assume that the rate at which energygoes into the oscillator is equal to the rate at which the oscillator loses energyor it's mechanical loss[1]. This system was �rst proposed by Nicolas Smith inhis paper �A Technique for Continuous Measurement of the Quality Factor ofMechanical Oscillators� and it's main intended use is for measuring the qualityfactor of lenses and lens samples that may be used in the LIGO interferometer[1].
So far I have made a proportion Integral Derivative (PID) controller systemcapable of locking both the phase and amplitude of the oscillator to fractionsof a percent on a test oscillator with Q of 5 ∗ 104 ± 104. I have also been ableto lock the phase between the exciter and the LIGO lens sample to π
2 for opticswith quality factors of around 8∗105±105 with only a few degrees of error witha proportional controller. Currently I am redesigning the PID based amplitudeand phase controller to run on the 8∗105±105 Q system. It is important to notethat this project was a collaboration between Greg Harry, Jonathan Newport,Isaac Jafar, Nicolas Smith, Matt Abernathy and myself. Finally, I have onlymentioned the most pertinent lessons, experiments and tests of this project inthis paper and it is meant to be a representation of these things not a completerepresentation of all work I have done on this project.
2 Background
The Laser Interferometer Gravitational Wave Observatory (LIGO) is a NationalScience Foundation funded collaboration that aims to detect gravitational waveswith an interferometer. Unfortunately these waves are weak in comparison to
1

the noise sources in the environment including thermal noise[2]. This thermalnoise is a negligible noise source in many optical systems but is a key source ofnoise in the high precision LIGO interferometer. Low thermal noise is correlatedto a high quality factor. As such, lens samples with high quality factors aredesired for use in LIGO as are systems to e�ciently measure the mechanicalloss of lens samples. Quality factor or Q is essentially the rate at which anoscillating system loses its amplitude of oscillation and mechanical loss is thematerial speci�c analog of this concept [10]. Having e�cient systems of qualityfactor measurement are especially important as alterations to LIGO lens samplesare often made and altered to combat other noise sources such as shot noise andBrownian noise and resultant decreases in the quality factor of the lenses mustbe checked and controlled[6].
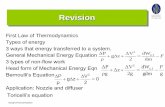
The current system of quality factor measurement employed by many LIGOlens sample testing operations depends on driving lens samples at resonanceuntil they reach a maximum resonance amplitude and then turning o� the driverand allowing the lens sample to ring down while recording amplitude decay overtime. Speci�cally, in the current system employed at American University, when�nding the quality factor of an lens sample we generate and AC signal whosefrequency is the same as the frequency with which we wish to drive the lenssample. This signal originates in the function generator and passes througha voltage ampli�er and into a comb exciter, which is simply a long piece ofwire coiled tightly around a piece of metal and stationed physically close tothe lens sample. As the high AC voltage moves through the wire it creates anelectromagnetic �eld whose amplitude oscillates at the frequency of the functiongenerator. This causes the lens sample to sinusoidally �ex or oscillate at thesaid frequency. This oscillation is observed with a birefringence meter and ismonitored with a spectrum analyzer and oscilloscope. The drive frequencyis altered until one believes they have found a mode based on the frequencyresponse. At this point they turn o� the driver and a computer script analyzesthe decrease in the LIGO lens sample's amplitude over time to �nd the Q. Thesecomponents are organized as seen in �gure 1.
The mathematics that the computer uses to equate decrease in oscillationamplitude over time to Q is described below:
Where E is energy and A is amplitude of an oscillation[5]:
E =1
2kA2 (1)
Where E is energy after time t, E0 is initial energy when the exciter is turnedo�, T is period and Q is quality factor[5]:
E = E0e−t2πTQ (2)
Plugging these two results together we get:
1
2kA2 =
1
2kA2
0e−t2πTQ (3)
This equation can be simpli�ed as shown:
2

Figure 1: A diagram of the components used in American University's systemfor computing Q values by the ring down technique.
3

A = Ae−t2πTQ
0
A = A0e−t2πTQ
A
A0= e
−t2πTQ
ln(A
A0) =−t2πTQ
(4)
Q =−t2π
T ∗ ln( AA0)
(5)
Although this system is functional it has some �aws. It requires the highQ lens samples to be driven at a resonance frequency which can be challenginggiven the inverse proportionality of bandwidth and quality factor, Q as shownin equation 6.
Where FWHM=The width of the frequency band at half the maximumamplitude[5]:
FWHM =w0
Q(6)
Also for some LIGO lens samples whose Qs can run in the millions havingto wait for a lens sample to lose most of its amplitude can take a long time.For instance, for a lens sample that has a �rst mode frequency of 2690 which isabout average for LIGO lens samples and Q of 8 ∗ 106to decay its oscillation to5 percent of its original maximum oscillation amplitude, making a measurementwith a minimum of 5% fractional uncertainty possible, will take:
From Equation 4:
ln(A
A0) =−t2πTQ
simplifying
1
t=
−2πT ∗Q ∗ ln( AA0
)
and simplifying further, where A0 = 1 and A = .05, or 5% of the original,and T = 1
f = 12850 = .000350877 is
t ≈.000350877 ∗ 3 ∗ 106 ∗ ln( .051 )
−2π≈ 502(seconds) ≈ 8.4(minutes)
4

This is troublesome given that this system can only measure lens sampleswith quality factors in the millions with at best 10 or 20% error[8]. Necessitatingrepeated ringing.
The slowness and inaccuracy of this system of Q measurement necessitatesthe system of control loops which may be quicker and more accurate and ishighly automated making automation of this measurement process less laborintensive.
The controls system of Q measurement depends on several other key ideas.First is phase, which in this case refers to the phase between the harmonicdriver, and harmonic oscillator or lens sample. At the point at which phaseequals π
2 or the phase where driver and oscillator are completely out of phaseall the energy of the driver goes to the oscillator[5].
It is common for mode frequencies of LIGO tests mass modes to drift soquickly that if one wants to repeatedly measure the Q of a lens sample, by thetime the lens sample has been rung down so the Q may be recorded the modefrequency has shifted. As one can see from Equation 6 the full width at halfmax of a mode frequency of a LIGO lens sample, which often have Qs upwardsof 106 and a �rst mode frequency of 2690 may be very small [8]. Because of thissmall bandwidth even a slight shift in ω0 can mean one observes a much lowerfrequency response if one drives at the old ω0. The feedback based system willcontinuously close this error and track ω0 and continuously drive at this mode.
One positive of this system is that it is a second system of Q measurementand it can give conformation for the current system of Q measurement we al-ready have. This constant amplitude also means that the signal strength isconstant, which will give a constant signal to noise ratio. This feedback systemalso allows one to simultaneously derive Q values from more than one mode.This is possible with a ring down but is very hard. This feedback system also willallow people to investigate the e�ect of oscillation amplitude on mechanical loss.In the ring down technique system of quality factor measurement the mechan-ical loss must be measured as a re�ection of a variety of di�erent amplitudes,because a ring down is a change in amplitude. Feedback Q measurement wouldmake amplitude dependent mechanical loss measurement possible. Althoughno one has ever made a continuous Q measuring system capable of measure theQ of oscillator whose Qs are in the 105 range Mathew Winchester created acontinuous Q measurement system capable of measuring Qs of magnitude 104
using Nicolas Smiths method.Another idea key to understanding this controls system of Q measurement
is knowledge of a proportion, Integral, derivative (PID) controller. A PID con-troller takes the error signal which is the di�erence between the set point ordesired system value and the actual state of the system to create the error sig-nal. A PID controller then performs three operations with this error signal.Firstly, it multiplies this error by a given proportion and sends this signal as acorrection factor to the actuator, which in this case is an oscillator, altering itsbehavior to bring its output to the set point. Simultaneously the integral termwhich is the integral of error with respect to time over either all time or a setperiod of time, which is essentially an average error is calculated and multiplied
5

by a constant. This signal is also sent to the actuator to appropriately alter itsbehavior to bring its output to the set point. Also simultaneously the derivativeterm of the PID which is the derivative or rate of change of error over all orsome of the system's run time is calculated and multiplied by a constant andsent to the actuator to appropriately alter its behavior to bring its output tothe set point. These mechanisms are mathematically described below in theequation. Where e(t) is the error signal, u(t) is the total correction signal, τis the time over which the error is intergraded, Kpis the constant altering thelevel of e�ect of the proportional term, Kiis the constant altering the level ofe�ect of the integral term and Kdis the constant altering the level of e�ect ofthe derivative term. [3]:
u(t) = Kpe(t) +Ki
t�
0
e(τ)dτ +Kdde
dt(7)
A last key concept to understanding the methods and results found in thislab is a brief overview of a lock-in ampli�er. A lock-in ampli�er can be usedto �nd a signal whose amplitude is below the noise �oor and �nd the phasebetween a reference signal and the experimentally derived input signal. In mycase the Vac, the experimentally derived signal is the signal determined by thebirefringence meter's interaction with the lens sample and Vref, the referencesignal is the drive signal.
Where: V0 is the amplitude of the unknown signal,Vac is the electric signalcoming from the experiment with known gain from the lock-in's preampli�erofGac, amplitude V0, and angular frequency w0,Vref is a experimenter gener-ated and de�ned signal with amplitude V1, angular frequency w1and a phasedi�erence of φ from Vac, Equation 1 shows the experimentally generated signalV0Sin(w0t) multiplied by a gain from the lock-in's preampli�er Gac
Vac = GacV0Sin(w0t) (8)
Vref = V1Sin(w1t+ φ) (9)
The two signals are sent into a multiplicative mixer.
VrefVac = GacV0V1Sin(w0t)∗Sin(w1t+φ) =GacV0V1
2[Cos(w0t−w1t−φ)−Cos(w0t+w1t+φ)]
(10)Where:
w0 = w1 (11)
GacV0V12
[Cos((w0−w0)t−φ)−Cos((w0+w0)t+φ)] =GacV0V1
2[Cos(φ)−Cos((2w0t)+φ)] =
6

GacV0V12
Cos(φ)− GacV0V12
Cos((2w0t) + φ) (12)
With an integrator or low pass �lter of high capacitance AC signals areattenuated to ground leaving:
GacV0V12
Cos(φ)
V1, Vref and Gac are known. Therefore by multiplying these known termsthrough wecan �nd the hitherto unknown experimental signal amplitude V0.
GacV0V12
∗ 2
GacV1= V0Cos(φ) = X (13)
Simultaneously in a 2nd branch of the circuit the reference signal is phaseshifted 90 degrees resulting in a 2nd reference signal, Vref2 = V1Sin(w1t +(φ + 90)). Vref2 and Vsig are combined as described for Vref and Vsig and theresulting in the output is:
GacV0V12
Cos(φ+ 90)
and
GacV0V12
Cos(φ+ 90) ∗ 2
GacV1= V0Cos(φ+ 90) = Y
Geometrically wecan see the phase φ is:
φ = tan−(Y
X) = tan−(
V0Cos(φ+ 90)
V0Cos(φ))
And the signal amplitude is:
R =√X2 + Y 2 =
√(V0Cos(φ))2 + (V0Cos(φ+ 90))2
3 Method
In his paper Nicolas Smith set Q in terms of the output of a driven amplitudeand phase locked system as:
ϕ = Q−1 =2ωU {a}cHUω0
(14)
Where ϕ = mechanical loss, ω0= natural frequency, HU =feedback gain atunity gain frequency, c =amplitude set point, ωU= unity gain frequency and{a}= the integral or average of the control signal of amplitude over time.
I approached this project as three distinct tasks. The �rst task was to createa phase locked loop, which locked the phase between the lens sample and the
7

Figure 2: A diagram of the circuit inside the crystal oscillator simulator.
driver to π2 . The second task was to create an amplitude locked loop that chose
a set point and locked the amplitude of the lens sample's oscillation while it'sphase was locked to π
2 . The third task was to �nd a system of continuouslymeasuring unity gain frequency and feedback gain at unity gain frequency.
Accomplishing each task made accomplishing the next task possible and pro-vided more of the parameters needed to compute Q with equation 13. Lockingphase to π
2 made it possible to �nd the �rst mode natural frequency ω0 or be-cause ω0 is the drive frequency where phase equals π
2 . It also made lockingamplitude pertinent because until phase=π
2 not all of the driver's energy is be-ing transferred to the oscillator and one should not expect that the energy intothe system is equal to the energy out of the system. Locking amplitude madeit possible to �nd the error of the amplitude lock and c, the set point of theamplitude. Locking the amplitude makes it possible to �nd the feedback gainof the system at the unity gain frequency because the feedback system needs toexist before one can �nd it's feedback gain at its unity gain frequency.
Before any actual construction could begin it was necessary to create a theo-retical model for how the components of this system of feedback controls shouldinteract to lock phase and amplitude of a LIGO lens sample. This concept hasstayed fairly constant throughout the project. The essential components consistof a plant which creates a signal which functions both as a drive signal and areference signal. The displacement as a function of time output signal derivedfrom the driven oscillator is then sent to the amplitude and phase detector whereit is compared to the reference/drive signal to see the phase between the oscil-lator and the drive signal and �nd the driven oscillator's amplitude. The phaseand amplitude detector then outputs the phase and amplitude signals whichare compared to the set point values to create an amplitude error signal anda phase error signal. As discussed above once the phase has been locked to π
2the amplitude lock may begin to act but not before. The error signals are thenprocessed by the amplitude feedback function and phase feedback function tocreate phase and amplitude correction signals. These signals are then used toreset the plant's output frequency and phase. This process is shown in Figure3.
The next task was to translate this ideal system into a physical reality usingthe components I have at my disposal. Comparing the components of the old Qmeasurement system seen in �gure 1 to the components of my new theoretical
8

Figure 3: A block diagram of theoretical components of this feedback system.
system the function generator; ampli�er and electromagnetic comb actuatorfunction as my plant. The signal the LIGO lens sample makes in conjunctionwith the birefringence meter, and band pass �lter function as the oscillator andthe lock-in is my phase and amplitude detector. The computer functions as theset point holder, error signal generator and feedback function generator. Thisnext set up is shown in �gure 4. Much like the theoretical infrastructure of thisproject the physical incarnation of this system has not changed much over thecourse of this project.
4 Results
Some of the most informative results of this project was the development ofthe feedback functions of the phase lock and the amplitude lock. Throughoutthe project my phase and amplitude locks functioned as single input singleoutput, feedback controls whose inputs were amplitude and phase from the lock-in ampli�er and returned new voltages and frequencies to which the computerset the function generator's output[11]. I also found that the phase at which allenergy was being transferred from the actuator to the oscillator was −π2 insteadof π2 which also transfers all of the driver's energy to the oscillator as one cansee from �gure 5 [5]. This meant that as I approached ω0 from 0 driving at eachfrequency and observing frequency
response wewould have a negative error signal because:Where x > −90:
−90− x > 0
And where x < −90:
−90− x < 0
This means when my error signal was less than 0 I needed to add a positivefrequency correction signal to my current drive frequency and when error signalwas greater than 0 I needed to add a negative correctional signal to my currentfrequency.
9

Figure 4: The physical system used in this project.
10

Figure 5: Frequency response and phases at various drive frequencies.
11

Figure 6: This is the pseudo code of the phase locking function which shiftedphase by shifting frequency by a set increment.
The �rst attempts to create a phase lock were conducted on the low Qtest oscillator as outlined in the methods section. This controller had a simplemechanism in which if phase error was negative the frequency was increasedby an assigned increment and if phase error was positive the frequency wasdecreased by the assigned increment. A sample of this code can be seen in�gure 6 and the resultant phase lock can be seen in �gure 7. As one can seefrom the two order of magnitude di�erence in band width between the lowQ oscillator and the LIGO lens sample, the increments of frequency changeneeded to be much smaller to lock to phase to −π2 . Also the frequency responsewas much slower at this order of magnitude higher Q as one might expect fromequation two. As one can see from �gure 5 as phase approaches −π2 each changein frequency has more of an e�ect on phase. This means that it is impossible tocreate a controller that is both quick to get to −π2 quickly and accurate enoughto drive directly at frequency −π2 .
Two strategies were tried to address this issue. First every time the fre-quency was changed the old increment of change was decreased or increased bya constant as can been seen in the code in �gure 8, the resultant phase error ona low Q system can be seen in �gure 9. This failed to work on the LIGO lenssample because the corrective ability was not a direct function of the amount ofcorrection needed. The more e�ective strategy was to rede�ne the increment offrequency change in terms of the components of equation 6, ω0 and Q and phaseerror every time the frequency was readjusted to re�ect both the band width ofthe mode and the amount of correction needed for the driver to drive at π2 . Theold frequency that the function generator has been assigned to generate wasstored and the newly de�ned change increment was added to the old frequencyand this new frequency was assigned to be become the output of the functiongenerator and the process was repeated. This error and bandwidth based termwas then multiplied by a constant which was altered and tested many timesuntil the system behaved satisfactorily. An example of this can be seen in codein �gure 10. This strategy resulted in a phase lock capable of locking the phasewithin 4 degrees of −π2 on the LIGO lens sample. A graph of the output of thisphase controller can be seen in �gure 11.
12

Figure 7: Phase with constant increment of phase shift
Figure 8: This graph shows the code informing a variable frequency shift incre-ment controller the code for which can be seen in �gure 8. The resultant phaseerror can be seen in �gure 9.
13

Figure 9: This graph shows phase error of a variable frequency shift incrementcontroller, operating on a low Q oscillator the code for which can be seen in�gure 8.
Although this was a step forward I knew that in order to maximize the accu-racy of the input parameters used to compute Q I needed to tighten our phaselock. Also this version of the phase lock loop was incapable of simultaneouslylocking the amplitude. In order to make a PID controller and thereby a strongerphase lock, integral and derivative functions returning variables equal to the in-tegral and derivative of error over the number of error steps were written intomy script. The output of the proportional feedback was assigned a variable,then these proportional, integral and derivative variables were then added to-gether to create the control signal. The integral function as computed using themathematics of Taylor's Equation for average:
xm =x1+x2+···+xN
N=
∑xiN
(15)
Where N is the number of entries in a number set, xm is the mean of thenumber set and x1toN and xi are all the entries in the data set [7].
And the derivative function was developed with a mathematical basis fromTaylor's equation for slope, Where x is the x axis x coordinate of a given point,and y is the y coordinate of a given point [7]:
Slope =N∑xy −
∑x∑y
N∑x2 − (
∑x)2
(16)
Figures 12 and 13 show the code of the integral and derivative functions.
14

Figure 10: Phase error with a proportional controller on a high Q LIGO lenssample. Although the phase error may not look much better than that shownin �gure 9 generated with the variable increment phase lock. Figure 9 wasgenerated on the low system with a band width two orders of magnitude greater.
Figure 11: Proportional feedback code used to generate the phase error on thehigh Q LIGO lens sample.
15

Figure 12: The code of the integral function.
A PID controller has 5 parameters. These are the constants by which eachterm is multiplied putting a gain on each terms e�ect on the overall feedbackand the amount of time over which the derivative and integrals are computed.In my case instead of computing the error over time I computed error over stepsor changes in frequency which happened once every time my computerized loopcompleted its run. In order to do this a list of errors was established and thislist was maintained at a prescribed length. The integrals and derivatives werethen computed from the data points in these lists. These list lengths werethis project's analogue of the amount of time over which the derivatives andintegral were computed. Although PID controllers are highly e�ective, tuningall �ve of these parameters to work e�ectively in concert is a hard task. Thesefunctions were then used in the phase lock loop and amplitude lock loop feedbackfunctions, allowing the low Q oscillator to lock both phase and amplitude withonly minimal error as one can see in �gure 14. Currently I am recon�guringthe parameters of the amplitude and phase lock loop so the PID controllers canwork e�ectively on the LIGO lens sample.
Some of the other work that was done as part of this project was testing thelock-in time constant that would allow the feedback loops to most e�ectivelycontrol the phase. my most successful locks were seen with a time constant of onesecond. However, these tests took place while I was using incremental correctioncontrol. On some later tests when phase was within 30 degrees either side ofπ2 and the time constant was set to one second, phase increased and decreasedas much as 30 degrees while the drive frequency was held constant. While anoverall decrease or increase in phase may be indicative of a high Q system with aslow frequency response, as per equation two, coming into phase with the driver,seemingly random �uctuations seem to be more indicative of a noisy signal. So
16

Figure 13: The code of the derivative function.
17

Figure 14: Error in phase and amplitude of the working amplitude and phaselock loop running on the low Q oscillator. Note the amplitude set point was.0407946 V.
Figure 15: Percent error in amplitude lock loop working on the low Q oscillator.Notice that it is very low at all points.
18

I believe moving forward it would be good to test the controllers at higher timeconstants which means more noise will be averaged out but updates on phaseand amplitude will come less quickly[4].
Another important result of this research was the creation of a piece ofscript that detected modes. The script set the function generator to variousfrequencies and recorded the amplitude response. This script maintained a listof frequency responses excluding the most recent ones and took the average ofthis list and compared it to the current frequency response. When the currentfrequency response became su�ciently greater than the average of past responsesthe phase lock loop was triggered to being locking. Although this was a goodpiece of code, on tests of the phase and amplitude locks in which I am roughlyaware of the modes frequency, which take place often, it is entirely irrelevant.In future work I would like to encapsulate this part of the script so it is easierto turn o�.
Because I still have to tune the PID until the amplitude lock loop and phaselock work e�ectively on the LIGO lens sample and I still need to develop a systemof �nding unity gain frequency and thereby �nd the feedback gain this projectcan't really be called an unmitigated success. Non the less a lot of progress hasbeen made. Hopefully it has set the ground work for actually measuring the Qof a LIGO mirror in spring of 2016 when I will continue this work as I begin myrole as a research assistant for my advisor and supervisor Professor Greg Harry.
Appendix: Propagation of Error
According to equation 3.8 of Taylor [4]:
q =x ∗ . . . ∗ zu ∗ . . . ∗ z
,δq
|q|≈ δx
|x|+ . . .+
δz
|z|+δu
|u|+ . . .+
δw
|w|
and
δq = |q| δq|q|
References
[1] Smith, Nicolás D. "A Technique for Continuous Measurement of the QualityFactor of Mechanical Oscillators." Review of Scienti�c Instrumentation.Review of Scienti�c Instruments 86.5 (2015):
[2] Abramovici, A., W. E. Althouse, R. W. P. Drever, Y. Gursel, S. Kawa-mura, F. J. Raab, D. Shoemaker, L. Sievers, R. E. Spero, K. S. Thorne,R. E. Vogt, R. Iiss, S. E. Whitcomb, and M. E. Zucker. "LIGO: The LaserInterferometer Gravitational-Wave Observatory." Science 256.5055 (1992):325-33. Ib.
19

[3] Bechhoefer, John. "Feedback for Physicists: A Tutorial Essay on Control."Reviews of Modern Physics Rev. Mod. Phys. 77.3 (2005): 783-836. Ib.
[4] MODEL SR830 DSP Lock-In Ampli�er. Vol. 2.5. Sunnyvale, California:Stanford Research Systems, 2011. Print.
[5] Smith, Walter Fox. Waves and Oscillations: A Prelude to Quantum Me-chanics. New York: Oxford UP, 2010. Print
[6] Nawrodt, R., A. Zimmer, T. Koettig, C. Schwarz, D. Heinert, M. Hudl,R. Neubert, M. Thürk, S. Nietzsche, W. Vodel, P. Seidel, and A. Tünner-mann. "High Mechanical Q-factor Measurements on Silicon Bulk Samples."Jmynal of Physics: Conference Series 122 (2008): 012008. Print.
[7] Taylor, John R. An Introduction to Error Analysis: The Study of Uncer-tainties in Physical Measurements. Sausalito, CA: U Science, 1997. Print.
[8] C. Zhao, D.G. Blair, P. Barrigo, J. Degallaix, J-C Dumas, Y. Fan, S. Gras,L. Ju, B. Lee, S. Schediwy, Z. Yan. J. Munch, P.J. Veitch, D. Mudge, A.Brooks, and D. Hosken C. D.E. McClelland, S.M. Scott, M.B. Gray, A.C.Searle, S. Gossler, B.J.J. Slagmolen, J. Dickson, K. McKenzie, C. M. GinginHigh Optical Power Test Facility. IOP Science 32 (2006): 368-73. Print.
[9] Graf, Rudolf F. Modern Dictionary of Electronics. Boston: Newnes, 1999.Print.
[10] Nilsson, James William., and Susan A. Riedel. Electric Circuits. Reading,MA: Addison-Isley, 1996. Print.
[11] Åström, Karl J., and Richard M. Murray. Feedback Systems: An Introduc-tion for Scientists and Engineers. Princeton: Princeton UP, 2008. Print.
20