Control de Motor Universal
5
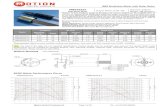
Speed sensor Motor ~Vac neutral TRIAC Zero Cross Detect TRIAC Firing PWM Wait time Speed setting ω r * ASR PI loop + - ω r Interrupt with Timer speed ω r Speed sensor Motor ~Vac neutral TRIAC Zero Cross Detect High Performance DC Chopper Speed and Current Control of Universal Motors Using a Microcontroller Huangsheng Xu, Kevin King, and Yashvant Jani Renesas Technology America, Inc. 450 Holger Way, San Jose, CA 95134 Abstract—This paper introduces a high performance DC chopper speed and current control system for universal motors. Differing from existing TRIAC and DC chopper speed control schemes, the new system adds the inner current control to improve dynamic response, and the motor starts up with closed speed and current control loops. Complete control schemes have been developed and implemented in a low cost Renesas R8C/25 16-bit microcontroller. Through a series of dynamometer tests, it has been shown that the proposed DC chopper control of the universal motor with both speed and current control has good speed regulation and fast response. It also has low acoustic noise, less current harmonics, low motor temperature, more torque and high motor efficiency. The experimental results demonstrate that the developed universal motor control has great potential and practical significance for industrial applications. Keywords – Universal motor; DC chopper control; current control; speed control I. INTRODUCTION The universal motor is a low-cost solution with limited performance. It is used widely in the consumer-products industry, especially for power tools and home appliances such as washers, mixers, vacuum cleaners, etc. This type of motor is called a “universal” motor because it can run on either AC or DC power[1-4]. To implement universal motor speed control, generally a triode AC switch (TRIAC) phase-angle firing control or DC chopper with a speed loop is applied. A TRIAC-based control scheme, as shown in Fig. 1, is a simple and cost-effective solution for controlling the universal motor speed by changing the phase angle. Actual speed, measured with a simple tachometer, is coupled with the desired speed to change the firing time of the TRIAC. This solution has many disadvantages, unfortunately, including high phase current and current harmonics, high motor temperature, noise, and low control frequency. A DC chopper provides a better solution for universal motor speed control. Fig. 2 shows a typical layout for DC chopper control of a universal motor. Driving the universal motor with a PWM signal reduces current ripple and harmonics and therefore results in better performance. Compared to the TRIAC control approach, the DC chopper control method has lower acoustic noise, less current and fewer current harmonics[5-9]. Traditionally the type of DC chopper control shown in Fig. 2 provides speed control only. It does not control the current. The speed is asynchronous, so the regulation frequency is dependent on the speed level. At low and medium speeds, the speed regulation is poor and the average error is large. The speed regulation improves at high speeds. But at Also, the speed dynamic response is somewhat slow. In other words, the control system takes a long time to get back to a steady state when load changes or external disturbances occur. Obviously, a control scheme that responds more quickly to load variations is preferable[10]. Fig. 1: Traditional TRIAC based speed control. Fig. 2: Typical DC chopper speed control. To better meet the requirements of universal motor control, this paper investigates and applies inner current control to the universal motor control system. The motor starts up with the closed speed and current loops. Complete control schemes, which have been developed and implemented in a low cost Renesas R8C/25 microcontroller, are used. A series of experimental tests has been conducted to evaluate and verify the system performance. The results show that the DC chopper with both speed and current control Speed sensor Power MOSFET 1 Motor +Vdc GND Register Counts PWM Voltage Duty cycle Speed setting ω r * ASR PI loop + - ω r Interrupt with Timer speed ω r Speed sensor Power MOSFET 1 Motor +Vdc GND Power MOSFET 1 Motor +Vdc GND 0197-2618/07/$25.00 © 2007 IEEE 701
description
maquinas, controles electricos
Transcript of Control de Motor Universal

TRIACFiring PWMWait time
Speed setting ωr
* ASRPI loop+ -
ωr
Interrupt withTimerspeed ωr
Speed sensor
Motor
~Vac
neutral
TRIAC
Zero Cross Detect
TRIACFiring PWMWait time
Speed setting ωr
* ASRPI loop+ -
ωr
Interrupt withTimerspeed ωr
Speed sensor
Motor
~Vac
neutral
TRIAC
Zero Cross Detect
High Performance DC Chopper Speed and Current Control of Universal Motors Using a Microcontroller
Huangsheng Xu, Kevin King, and Yashvant Jani
Renesas Technology America, Inc. 450 Holger Way, San Jose, CA 95134
Abstract—This paper introduces a high performance DC chopper speed and current control system for universal motors. Differing from existing TRIAC and DC chopper speed control schemes, the new system adds the inner current control to improve dynamic response, and the motor starts up with closed speed and current control loops. Complete control schemes have been developed and implemented in a low cost Renesas R8C/25 16-bit microcontroller. Through a series of dynamometer tests, it has been shown that the proposed DC chopper control of the universal motor with both speed and current control has good speed regulation and fast response. It also has low acoustic noise, less current harmonics, low motor temperature, more torque and high motor efficiency. The experimental results demonstrate that the developed universal motor control has great potential and practical significance for industrial applications.
Keywords – Universal motor; DC chopper control; current control; speed control
I. INTRODUCTION
The universal motor is a low-cost solution with limited performance. It is used widely in the consumer-products industry, especially for power tools and home appliances such as washers, mixers, vacuum cleaners, etc. This type of motor is called a “universal” motor because it can run on either AC or DC power[1-4].
To implement universal motor speed control, generally a triode AC switch (TRIAC) phase-angle firing control or DC chopper with a speed loop is applied. A TRIAC-based control scheme, as shown in Fig. 1, is a simple and cost-effective solution for controlling the universal motor speed by changing the phase angle. Actual speed, measured with a simple tachometer, is coupled with the desired speed to change the firing time of the TRIAC. This solution has many disadvantages, unfortunately, including high phase current and current harmonics, high motor temperature, noise, and low control frequency.
A DC chopper provides a better solution for universal motor speed control. Fig. 2 shows a typical layout for DC chopper control of a universal motor. Driving the universal motor with a PWM signal reduces current ripple and harmonics and therefore results in better performance. Compared to the TRIAC control approach, the DC chopper control method has lower acoustic noise, less current and fewer current harmonics[5-9].
Traditionally the type of DC chopper control shown in Fig. 2 provides speed control only. It does not control the
current. The speed is asynchronous, so the regulation frequency is dependent on the speed level. At low and medium speeds, the speed regulation is poor and the average error is large. The speed regulation improves at high speeds. But at Also, the speed dynamic response is somewhat slow. In other words, the control system takes a long time to get back to a steady state when load changes or external disturbances occur. Obviously, a control scheme that responds more quickly to load variations is preferable[10].
Fig. 1: Traditional TRIAC based speed control.
Fig. 2: Typical DC chopper speed control.
To better meet the requirements of universal motor control, this paper investigates and applies inner current control to the universal motor control system. The motor starts up with the closed speed and current loops. Complete control schemes, which have been developed and implemented in a low cost Renesas R8C/25 microcontroller, are used. A series of experimental tests has been conducted to evaluate and verify the system performance. The results show that the DC chopper with both speed and current control
Register Counts
PWMVoltage Duty cycle
Speed setting ωr*
ASRPI loop
+- ωr
Interrupt withTimerspeed ωr
Speed sensor
Power MOSFET
1
Motor
+Vdc
GND
Register Counts
PWMVoltage Duty cycle
Speed setting ωr*
ASRPI loop
+- ωr
Interrupt withTimerspeed ωr
Speed sensor
Power MOSFET
1
Motor
+Vdc
GND
Power MOSFET
1
Motor
+Vdc
GND
0197-2618/07/$25.00 © 2007 IEEE 701

provides good speed regulation and fast response. This proposed universal motor control system has great potential and much practical significance for industrial applications.
II. DESRIPTION AND ANALYSIS OF A UNIVERSAL
MOTOR CONTROL SYSTEM
A universal motor consists of three main parts: (1) a stator with field windings to generate magnetic flux; (2) a rotor with armature windings supplied with current via the carbon brushes to generate magnetic flux; and (3) brushes for mechanical linking of the power supply and rotor windings. If the universal motor is connected to a DC power supply, it behaves like a DC motor with a direction.
The equivalent circuit of a proposed universal motor with speed and current control is shown in Fig. 3.
fR
aR
aL
fi ai
e
fv
av
MOSFET
PWM
MCUnesascontrollerchopperDC
Re
DC
Fig.3: Equivalent circuit of universal motor with DC chopper controller.
The model of the proposed universal motor control can be described mathematically as:
(1)
af ii = (2)
aike ω1−= (3)
Where e is the motor back EMF; 1k is the motor constant dependent on the motor characteristics.
Because the universal motor is a serial excitation motor, the motor torque is proportional to the square of the motor current.
212 aLe ikkJpTT −=++= ωω (4)
The overall control system is composed of a speed proportional-integral (PI) regulator, a current PI controller, a speed measurement sensor, and a pulse width modulation (PWM) generator, as shown in Fig. 4. The system has two control loops: an inner current loop and an outer speed loop.
Both the speed and current controller use a typical PI control-loop format. The speed PI loop outputs the reference current required for the proper torque. The current PI control loop generates the voltage necessary to maintain the torque.
Whenever a reference speed r∗ω is given, the control
system automatically compares that reference speed to the motor’s actual speed rω , which is directly measured from the speed sensor. Based on the equation for the motor’s mechanical motion, the speed error rω∆ is the torque profile. Therefore, the output of the speed controller can be considered as the torque or the current reference value ∗i . An adjustment is made so that the motor speed rω follows the given reference value r
∗ω , and the motor achieves a steady state quickly. The current PI controller regulates the motor’s real current i and the reference current ∗i , and tracks the reference current ∗i and load in time. The output of the current controller is the PWM duty ratio, which directly controls the MOSFET ON or OFF states.
The current control loop is designed to be much faster than the speed control, so that the proposed DC chopper control system has a fast dynamic response to load changes and system variations. For this reason the addition of current control is crucial to the application.
Fig.4: Block diagram of proposed speed and current DC chopper control.
III. MICROCONTROLLER CONFIGURATION AND
IMPLEMENTATION
The proposed speed and current DC chopper for universal motor control has been implemented using a low-cost, low-pin-count 16-bit Renesas R8C/25 microcontroller to regulate both speed and current in the system.
The R8C/25 operates at a 20 MHz clock speed and has 16KB of on-chip flash memory and 1KB of RAM. It also provides useful on-chip peripherals including an I2C-bus interface (IIC)/chip-select clock synchronous serial interface (SSU), 10-bit A/D converter (ADC), output-compare timer, voltage-detection circuit, power-on reset circuit, high/low-speed on-chip oscillator, sub-clock generation circuit, and LIN module hardware. The R8C/25-based microcontroller configuration is shown in Fig. 5.
Register Counts
PWM
VDuty cycle
Speed setting ωr
* CurrentPI loop+ -
ωr
Interrupt withTimerspeed ωr
Speed sensorPower
MOSFET
1
Motor
+Vdc
GND
SpeedPI loop
Current measurement
+
-
ADCShuntOrDCCT
RefCurrent
Register Counts
PWM
VDuty cycle
Speed setting ωr
* CurrentPI loop+ -
ωr
Interrupt withTimerspeed ωr
Speed sensorPower
MOSFET
1
Motor
+Vdc
GND
SpeedPI loop
Current measurement
+
-
ADCShuntOrDCCT
RefCurrent
+−
+=
a
f
aa
ff
a
f
ii
pLRkpLR
vv
ω1
0
702

Four interrupts in the control scheme are designed to ensure time-critical performance. Motor speed is measured by means of a sensor interrupt and timer RB. This speed is calculated as the weighted average over 32 samples. Motor current is sampled every carrier frequency using an ADC interrupt and averaged over two measurements. The PWMs are generated by the timer RD PWM interrupt to provide voltage to the motor.
The hall sensor interrupt has the highest priority, and the rate varies from 240 Hz to 1200 Hz. The ADC interrupt has the second highest priority, and the rate is identical to the PWM rate because it is triggered in the PWM interrupt. The PWM interrupt is ranked third in priority and occurs at the 12 kHz carrier frequency.
Fig.5: R8C25 based universal motor control configuration.
IV. EXPERIMENTAL TEST RESULTS AND ANALYSIS
To verify the proposed speed and current DC chopper control, a series of experimental tests was conducted on the dynamometer. The dynamometer setup consists of the following: a universal motor, brake (with max torque of 3.25 Nm and max speed of 15,000 rpm) and Magtrol DSP6001 dynamometer controller. The entire speed range with the maximum load was evaluated.
Fig. 6 shows the motor startup and the speed ramp-up from 0 rpm to around 134,000 rpm. The motor speed is shown to be stable for the entire speed range.
A speed deviation of less than 2% was required. To determine whether the proposed DC chopper control system satisfied this requirement, the system was verified using a step maximum load. Figs. 7 and 8 compare the speed and speed response of the proposed (“developed”) speed-and-current DC chopper control system with an existing speed-loop-only DC chopper control system. Both examples use the same step load at a low speed of 2,200 rpm.
Fig. 7 shows that the speed of the developed control system is stable. The system has little drop when the load is
added, and minimum overshoot when the step load is removed. Also, the speed fluctuation in this case is small, only 1-2 rpm at the steady state. The test data for this system show that the speed deviation is less than 2% at all speeds. By contrast, Fig. 8 shows that the speed of the existing control system varies more. In particular, the motor speed jumps more than 800 rpm when the load is removed. Additionally, with the existing control system the speed takes longer to recover from sudden changes in the load.
Figs. 9 and 10 give the speed and speed response at the highest speed of 13,500 rpm. Fig. 9 shows that the speed provided by the developed DC chopper control remains relatively stable even with the 32oz-in load. Also, the speed stays constant. On the other hand, the speed provided by the existing control system drops 200 rpm under the same load condition.
Universal Motor Speed1-10 and Torque by RTA DC Chopper Control
0
2000
4000
6000
8000
10000
12000
14000
1 21 41 61 81 101 121 141 161 181 201
Time (tic = 0.25 sec)
Spee
d (R
PM)
Fig.6: Motor startup and all speeds from 0 to 13,000rpm.
Universal Motor Speed and Torque by RTA DC Chopper Control
0
500
1000
1500
2000
2500
3000
3500
1 21 41 61 81
Time (tic = 0.25 sec)
Spee
d (R
PM)
0
50
100
150
200
250
300
Torq
ue (o
z-in
)
Fig.7: Speed and speed response for developed control at speed of 2,200rpm.
Timer RD Complimentary
as well as selectable
outputs
Timer RB
INT0
Hall Sensor
Up
Vp
Wp
Un
Vn
Wn
U
V
IPM f1
R8C/25 Group
16bit-PWM
Emergency ShutDown
Error Pulse
DC Brushless
Motor
AN0
AN2
AN3
AN4
P14
P15
P16
AN1
Current Sensor Input
(Display) LED3
LED2
LED1
Speed Setting Input
Temperature Input
Motor Speed Detection
703

Universal Motor Speed1 and Torque by existing Control
0
500
1000
1500
2000
2500
3000
3500
1 21 41 61 81 101 121 141
Time (tic = 0.25 sec)
Spee
d (R
PM)
0
50
100
150
200
250
300
Torq
ue (o
z-in
)
Fig.8: Speed and speed response for existing control at speed of 2,200rpm.
Universal Motor Speed10 and Torque by RTA DC Chopper Control
0
2000
4000
6000
8000
10000
12000
14000
1 21 41 61 81 101 121 141 161 181 201 221 241 261
Time (tic = 0.25 sec/sample point)
Spee
d (R
PM)
0
10
20
30
40
50
60
70
80
90
100
Torq
ue (o
z-in
)
Fig.9: Speed and speed response for developed control at speed of 13,500rpm.
Universal Motor Speed10 and Torque by existing Control
0
2000
4000
6000
8000
10000
12000
14000
1 21 41 61 81 101 121 141
Time (tic = 0.25 sec)
Spee
d (R
PM)
0
10
20
30
40
50
60
70
80
90
100
Torq
ue (o
z-in
)
Fig.10: Speed and speed response for existing control at speed of 13,500rpm
Fig. 11 shows the speed-torque curves for the proposed control and existing control systems under the same speed and load. The blue curve is for the developed control system and the pink curve is for the existing control system. It is apparent that the developed speed-and-current DC chopper control system generates more torque—nearly 20% more—across the entire speed range.
Speed_torque Comparison for RTA Control and Production Control
0
200
400
600
800
1000
1200
1400
1600
0 2000 4000 6000 8000 10000 12000 14000
speed
torq
ue
Fig.11: Speed and torque comparison between developed DC chopper control and existing control.
Figs. 12 and 13 show the motor phase currents generated by the proposed DC chopper control system without and with the load. The motor current shows little variation even under the maximum load condition. This results in fewer current harmonics and, thus, less EMI.
Fig.12: Motor current by proposed DC chopper control without load.
704

Fig.13: Motor current by proposed DC chopper control with maximum load.
V. CONCLUSIONS
A DC chopper-based system for speed and current control of universal motors has been developed successfully. The system can deliver maximum torque in the entire speed range, from 2,000 rpm to 13,000 rpm. Compared to traditional TRIAC systems and systems that use DC chopper control with a speed loop only, the newly developed speed-and-current DC chopper control system offers significantly improved performance.
It provides the known mechanical advantages of a DC chopper over a TRIAC system—including more efficient motor operation (low power usage, low temperature operation), elimination of audible “dimmer switch” noise, and overall reduced acoustic noise. Moreover, tests show that the DC chopper speed and current control system offers the following benefits:
• better speed regulation; • speed and current loop combination for faster
response to load changes and external disturbances; • more torque available to the motor (about 20% more
estimated).
These experimental results suggest that the proposed universal motor control has great practical significance for industrial applications.
REFERENCES
[1] H. Toliyat, G. Kliman, Handbook of Electric Motors, 2nd edition, Marcel Dekker, 2003.
[2] P. Vas, Sensorless Vector and Direct Torque Control, Oxford Science Publications, New York, 1998.
[3] D. Novotny and T.A. Lipo, Vector Control and Dynamics of AC Drives, Oxford University Press, New York, 1996.
[4] W. Leonhard, Control of Electric Drives, Springer-Verlag, New York, 1996.
[5] J. Cros, P. Viarouge, Y. Chalifour, and J. Figueroa, “A new structure of universal motor using soft magnetic composite”, IEEE Proc. IAS – Thirty-Sixth annual meeting, 2001, vol. 1, page(s): 75-82.
[6] C. Ozturk, B. Gok, H. Acikgoz, and A. Balikicioglu, “ Noise emission of universal motor drives”, IEEE industry applications magazine, vol. 4, issue 4, 1998, page(s): 49-66.
[7] H. Bodur, A. Bakan, and M. Sarul, “Universal motor speed control with current controlled PWM AC chopper using a microcontroller”, IEEE Proc. industrial technology 2000, vol. 1, page(s): 394-398.
[8] A. S. Zein El Din, M. El-Shebiny, and M. Khater, “Microcomputer- controlled universal motor”, IEEE Proc. Induratial electronics, 1996, Vol. 2, page(s): 653-658.
[9] A. Di Gerlando, R. Perini, and G. Rapi, “Equivalent circuit for the performance analysis of universal motors”, IEEE Trans. on Energy Conversion, vol.19, issue 1, March 2004, page(s): 18-27.
[10] R. N. Lea, and Y. Jani, “Design and performance comparison of fuzzy logic based tracking controllers”, IEEE Proc. industrial fuzzy control and intelligent systems, and NASA joint tech., Dec. 1994, page(s): 340-344.
705