Computing Small-Signal Stability Boundaries for Large
71
Transcript of Computing Small-Signal Stability Boundaries for Large

To appear in IEEE Transactions on Power Systems Vol. 1, No. 2, May 2003
Computing Small-Signal Stability Boundaries for Large-Scale Power
Systems
Sergio Gomes Jr., CEPELNelson Martins, CEPELCarlos Portela, COPPE/UFRJ
Rio de Janeiro - Brazil

2
Acknowledgements
• Herminio Pinto, previously with CEPEL
• Paulo Eduardo M. Quintão, FPLF-PUC/RJ
• Alex de Castro, FPLF-PUC/RJ

3
System Equations Linearized at Singular Point X0
( )( )uy
ux,hx,fxT
==⋅ &
( ) 0xf 0 =
udyu
∆⋅+∆⋅=∆∆⋅+∆⋅=∆⋅
xcbxJxT &

4
Basic Equations for the Hopf Algorithm
( )[ ]1v =⋅
=⋅−⋅c
0vJT pspecλ
•λspec is the specified value for a complex pole, to be reached through an appropriate change to the system parameter “p”
•The second equation defines the norm of the eigenvector “v”
•Solution by Newton-Raphson

5
Small-Signal Stability and Security Boundaries
( ) 0, =ωσB5%15%
25%
σ
jω
Where ζ = 35%
( ) ωζ
ζσωσ ⋅−
+=21
,B
ωσλ j±=

6
Non-Linear Equations for Security Boundary (Modified Hopf) Algorithm
( ) 0=p,xf 0
( )[ ] 0vxJT 0 =⋅−⋅λ p,
1=⋅ vc
( ) 0=ωσ,B

7
Matrix Problem to be Solved at Every Iteration
JT −⋅σ
c
newrev
newimv
σ∆
ω∆
p∆
0
0
1
0
JT −⋅σ
T⋅ω−
T⋅ω
c
σ∂∂B
ω∂∂B
B−
revT ⋅ imvT ⋅−
revT ⋅imvT ⋅
revJp∂∂
−
imvJp∂∂
−
=•

8
Compact Form for Hopf Equations Involving the Prior Factorization of the
System Jacobian Equations
[ ] [ ] [ ]
[ ] [ ] [ ]
−
=
∆
ω∆
σ∆
⋅
ω∂∂
σ∂∂
⋅ℑ⋅ℜ⋅ℑ
⋅ℜ⋅ℑ−⋅ℜ
BpBB
0
1
0
211
211
vcvcvc
vcvcvc

9
Hopf Bifurcations
• Compute parameter values that cause critical eigenvalues to cross small-signal stability boundary
• Hopf bifurcations are computed for:
– Single-parameter changes
– Multiple-parameter changes (minimum distance in the
parameter space)

10
Experience with Inter-Area Oscillation Problems (1/2)
1984Taiwan1982-1983Western Australia
1978Scotland-England1975South East Australia
1971-1974Italy-Yugoslavia-Austria1971-1970Mid-continent Area Power Pool (MAPP)Late 1960’sSweden-Finland-Norway-Denmark1964-1978Western USA (WSCC)1962-1965Saskatchewan-Manitoba-Ontario West
1959Michigan-Ontario-Quebec

11
Experience with Inter-Area Oscillation Problems (2/2)
2000Brazilian North-South1998South-African Cone1998Argentinean Interconnected System (SADI)1992Venezuela-Colombia Interconnection1986Brazilian North-Northeast1985Ontario Hydro
1985-1987Southern Brazil
1985Ghana-Ivory Coast
Original slide from Dr. Prabha Kundur, with thelast five additions by the authors

12
North-Northeast Interconnection (1988)
RI O
XINGU
RI O
DAS
A LMA
S
RIO
AR
AGUAIA
RIO
TOCANT
I NS
R IOPA
RA NA
O ANT I NZI NH
RI O
S. F
R
ANCI S
CO
R IO
F OR M
OSO
R I OCOR R E N T E
R I O P AR AGU A C U
OJE Q
U I T I N H ONH
A
RI O
A RA
A I
R I OP R E T O
RIO
TO
CANT
INS
AGUA
S.SIMAOITUMBIARA
S.GOTARDO 2
JAGUARAPORTOMARIMBONDO
IRAPE
PIRAPORA
FSA
MOCAMBINHO
JEQUITINHONHA
ALMEN
S. ANTONIO DE JESUS
ITABAIANINHA
JARDIM
PENEDO
SOBRADINHO
P.BR
BOA ESPERANCA
EUNAPOLIS
ELISEU
PICOS
BOM NOME
COREMAS
ACU
TAP/XIN1
F.3
M.A.GRANDE
MIRADOR
BELEM
S.DIVISA
SALVADOR
SME/TMA
GOV
MASCARENHAS
ALTAMIRA
BELO MONTE
TUCURUI
REP
V. CONDE
IPI/MAR
ESTREITO
MARABA
SERRA QUEBRADA
IMPERATRIZ
FRAGOSO
LAJ/SOB
LAJ/IRE
BARREIRAS
IRECE SOB/SLV
IRE/SLV
MUSSURE
S. LUIS
FORTALEZA
PIRIPIRI
CRATEUSTERESINA
QUIXADA
MILAGRES
RUSSAS
MOSSORO
SOBRAL PENTECOSTES
B. ESP/MIL
SJP/MIL
MIRANDA
PRES. DUTRA
SEC.T/P
SERRA da
S. ROMAO
SME/BJLBOM JESUS
GOV
FUNIL
TRES MARIAS
XAVANTES
BANDEIRANTES
CORUMBA
NOVA PONTE
CAPIM BRANCO
CAMACARI
NIQUELANDIA
LAJ/SJP
SAM/BJL
IR
V.GRANDE
VALADARES
MANGABEIRA
VERMELHA
COLOMBIA
MARTINS
MESA
S.G.PARA TAQUARIL
VARZEADA PALMA
IPATINGA
T.OESTES.LUZIA
MACEIOJAGUARI
NATAL
NATAL II
DA LAPA
S. JOAO DO PIAUI
ICO
BJL/GMB
PERISES
C. PENA
BANABUIU
QUI/REC
RECIFE
MIL/REC
XINGO
ANGELIM
AFONSO
ITABAIANACICERODANTAS
OLINDINA
SENHOR DOBONFIM
JUAZEIRO
ANHANGUERA
EMBORCACAO
M.CLAROS
NEVES MESQUITA
DOURADACACHOEIRA
ITAPEBI
SAMAMBAIA
POMPEU
GU
PERITORO
ITAPARICA
PAULOMOXOTO MESSIAS
RIBEIRAO
BRASILIA GERAL
BARRO ALTO
CATU
DERIVACAO
S. ISABEL
RT.
C
C. GRANDE
TACAIMBOGOIANINHA
PAU FERRO
PAPAGAIO
S.3BLAJEADO
IPUEIRAS
PEIXE
CANA BRAVA
TUPIRATINS
500 kV AC TRANSMISSION REINFORCEMENT ALTERNATIVENORTH-SOUTH INTERCONNECTION
ALTERNATIVES
DCIMPERATRIZ
ACIMPERATRIZ
S. DA MESA S. DA MESA
PEIXE
TUPIRATINS
LEGEND
HYDROELECTRIC PLANT
SUBSTATION
LT 230 kV
LT 500 kV
EletrobrásGRUPO COORDENADOR DE PLANEJAMENTO
DO S S ISTEM AS ELÉTR ICO S - GCPSLT 345 kV
SOUTHEAST
NORTHEAST
NORTH
CENTRAL WEST
Northeast Generation
TucuruíGenerator

13
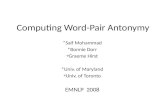
Brazilian N/NE InterconnectionSpontaneous oscillations controlled by operator through MW reduction
Tucurui's Power Plant Recordings (N/NE System)
0 1 2 3 4 5 6 7 8 9 10
Vt=4%
Pe=190 MW
1 s
Efd = 200 V
Peo= 1550 MW
Vto=104%
Time in seconds (s)
Oscillation problem later solved via PSS retuning

Section 7.9 of CIGRE TF 38.02.16 Document“Impact of the Interaction Among P. System Controls”
Field Tests to Determine the Effectiveness of the TCSC Controllers in Damping the
Brazilian North-South Intertie Oscillations
C. Gama L. Ängquist G. Ingeström M. NoroozianEletronorte ABB

15
The North-South Brazilian Interconnection

16
TCSCs Located at the Two Ends of the North-South Intertie

17
System Staged Tests – no PODs on 2 TCSCsBrazilian North-South System goes Unstable!

18
System Staged Tests – with 2 PODsBrazilian North-South System is now stable

19
Large-Scale, Decentralized Oscillation Damping Control Problem

20
Hopf Bifurcations – Test System Utilized
• System Data:– 2400 buses, 3400 lines/transformers, 2520 loads– 120 generators, 120 AVRs, 46 PSSs, 100 speed-governors– 1 HVDC link (6,000 MW)– 4 SVCs– 2 TCSCs
• Jacobian Matrix:– 13.062 lines– 48.521 non-zeros– 1676 states

21
Hopf Bifurcations – Test System Problem
• The TCSCs are located one at each end of the North-South intertieand are equipped with PODs to damp the 0.17 Hz mode
• The Hopf bifurcation algorithms were applied to compute eigenvalue crossings of the security boundary (5% damping ratio)for simultaneous gain changes in the two PODs

22
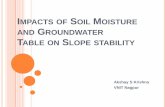
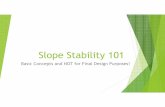
Eigenvalue (Pole) Spectrum for Brazilian North-South System (1,676 eigenvalues)
Poles in window near the origin are shown enlarged in next slides
-16
-12
-8
-4
0
4
12
16
-10 -8 -6 -4 -2 0Real Part (1/s)
Eigenvalue Spectrum
8

23
0.0
0.4
0.8
1.2
1.6
2.0
-0.8 -0.6 -0.4 -0.2 0.
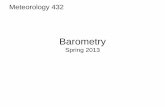
K=0.6
K=0.6
5%
North-Southmode
Adverse controlInteraction mode
Root Locus (focusing on the critical poles within small window) when Reducing the Gains
of the 2 TCSCs

24
0.0
0.4
0.8
1.2
1.6
2.0
-0.8 -0.6 -0.4 -0.2 0.
K=0.6
K=0.6
North-Southmode
Adverse controlInteraction mode
5%
Root Locus (focusing on the critical poles within small window) when Reducing the Gains
of the 2 TCSCs

25
0.0
0.4
0.8
1.2
1.6
2.0
-0.8 -0.6 -0.4 -0.2 0.
K=0.6
K=0.6
North-Southmode
Adverse controlInteraction mode
5%
Root Locus (focusing on the critical poles within small window) when Reducing the Gains
of the 2 TCSCs

26
0.0
0.4
0.8
1.2
1.6
2.0
-0.8 -0.6 -0.4 -0.2 0.
K=0.6
K=0.6
North-Southmode
Adverse controlInteraction mode
5%
Root Locus (focusing on the critical poles within small window) when Reducing the Gains
of the 2 TCSCs

27
0.0
0.4
0.8
1.2
1.6
2.0
-0.8 -0.6 -0.4 -0.2 0.
K=0.6
K=0.6
North-Southmode
Adverse controlInteraction mode
5%
Root Locus (focusing on the critical poles within small window) when Reducing the Gains
of the 2 TCSCs

28
0.0
0.4
0.8
1.2
1.6
2.0
-0.8 -0.6 -0.4 -0.2 0.
K=0.6
K=0.6
K=0
K=0
North-Southmode
Adverse controlInteraction mode
5%
Root Locus (focusing on the critical poles within small window) when Reducing the Gains
of the 2 TCSCs

29
0.0
0.4
0.8
1.2
1.6
2.0
-0.8 -0.6 -0.4 -0.2 0.
K=0.6
K=0.6
North-Southmode
Adverse controlInteraction mode
5%
Root Locus (focusing on the critical poles within small window) when Increasing the Gains of the
2 TCSCs

30
0.0
0.4
0.8
1.2
1.6
2.0
-0.8 -0.6 -0.4 -0.2 0.
K=0.6
K=0.6
North-Southmode
Adverse controlInteraction mode
5%
Root Locus (focusing on the critical poles within small window) when Increasing the Gains of the
2 TCSCs

31
0.0
0.4
0.8
1.2
1.6
2.0
-0.8 -0.6 -0.4 -0.2 0.
K=0.6
K=0.6
North-Southmode
Adverse controlInteraction mode
5%
Root Locus (focusing on the critical poles within small window) when Increasing the Gains of the
2 TCSCs

32
0.0
0.4
0.8
1.2
1.6
2.0
-0.8 -0.6 -0.4 -0.2 0.
K=0.6
K=0.6
North-Southmode
Adverse controlInteraction mode
5%
Root Locus (focusing on the critical poles within small window) when Increasing the Gains of the
2 TCSCs

33
0.0
0.4
0.8
1.2
1.6
2.0
-0.8 -0.6 -0.4 -0.2 0.
K=0.6
K=0.6
North-Southmode
Adverse controlInteraction mode
5%
Root Locus (focusing on the critical poles within small window) when Increasing the Gains of the
2 TCSCs

34
0.0
0.4
0.8
1.2
1.6
2.0
-0.8 -0.6 -0.4 -0.2 0.
K=0.6
K=0.6
North-Southmode
Adverse controlInteraction mode
5%
Root Locus (focusing on the critical poles within small window) when Increasing the Gains of the
2 TCSCs

35
0.0
0.4
0.8
1.2
1.6
2.0
-0.8 -0.6 -0.4 -0.2 0.
K=0.6
K=0.6
North-Southmode
Adverse controlInteraction mode
5%
Root Locus (focusing on the critical poles within small window) when Increasing the Gains of the
2 TCSCs

36
0.0
0.4
0.8
1.2
1.6
2.0
-0.8 -0.6 -0.4 -0.2 0.
K=0.6
K=0.6
North-Southmode
Adverse controlInteraction mode
5%
Root Locus (focusing on the critical poles within small window) when Increasing the Gains of the
2 TCSCs

37
0.0
0.4
0.8
1.2
1.6
2.0
-0.8 -0.6 -0.4 -0.2 0.
K=0.6
K=0.6
North-Southmode
Adverse controlInteraction mode
5%
Root Locus (focusing on the critical poles within small window) when Increasing the Gains of the
2 TCSCs

38
0.0
0.4
0.8
1.2
1.6
2.0
-0.8 -0.6 -0.4 -0.2 0.
K=0.6
K=0.6
North-Southmode
Adverse controlInteraction mode
5%
Root Locus (focusing on the critical poles within small window) when Increasing the Gains of the
2 TCSCs

39
0.0
0.4
0.8
1.2
1.6
2.0
-0.8 -0.6 -0.4 -0.2 0.
K=0.6
K=0.6
North-Southmode
Adverse controlInteraction mode
5%
Root Locus (focusing on the critical poles within small window) when Increasing the Gains of the
2 TCSCs

40
0.0
0.4
0.8
1.2
1.6
2.0
-0.8 -0.6 -0.4 -0.2 0.
K=0.6
K=0.6
North-Southmode
Adverse controlInteraction mode
5%
Root Locus (focusing on the critical poles within small window) when Increasing the Gains of the
2 TCSCs

41
0.0
0.4
0.8
1.2
1.6
2.0
-0.8 -0.6 -0.4 -0.2 0.
K=0.6
K=0.6
North-Southmode
Adverse controlInteraction mode
5%
Root Locus (focusing on the critical poles within small window) when Increasing the Gains of the
2 TCSCs

42
0.0
0.4
0.8
1.2
1.6
2.0
-0.8 -0.6 -0.4 -0.2 0.
K=0.6
K=0.6
K=2.16
K=2.16
North-Southmode
Adverse controlInteraction mode
5%
Root Locus (focusing on the critical poles within small window) when Increasing the Gains of the
2 TCSCs

43
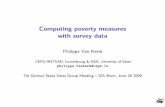
North-South System with no TCSCs
Interarea Mode: λ = −0,0335 + j 1,0787 (f = 0,17 Hz, ζ = 3,11 %)
Step Response (N-S Tie line Power)
-1.0-0.8-0.6-0.4-0.20.00.2
0 4 8 12 16 20Tempo (s)
NNE
SSE
Mode Shape for Generator Rotor Speeds

44
North-South System with 2 TCSCs
Inter-area mode without TCSCs: λ = −0,0335 + j 1,0787 (ζ = 3,11%)
Inter-area mode with TCSCs: λ = −0,318 + j 1,044 (ζ = 29,14 %)
-1.0-0.8-0.6-0.4-0.20.00.2
0 2 4 6 8 10 12 14 16 18 20Tempo (s)
Step Response (N-S Tie line Power)

45
Computation of S. Signal Stability Boundaries
• Different algorithms, heuristics, parameter limits and boundaries– Change of a single parameter (Newton)– Change of multiple parameters (Lagrange)– Step-length control– Maximum and minimum limits for parameter values– Small-signal security boundaries
• Cases investigated by the authors– Simultaneous change in the gains of the 2 TCSCs– Independent changes in the gains of the 2 TCSCs– Varying other system parameters

46
Hopf Bifurcation Results
0.0
0.4
0.8
1.2
1.6
2.0
-0.8 -0.6 -0.4 -0.2 0.
K=0.6
K=0.6
North-Southmode
Adverse controlInteraction mode
5%Determining Kmin for 5% Security Boundary

47
Hopf Bifurcation Results
0.0
0.4
0.8
1.2
1.6
2.0
-0.8 -0.6 -0.4 -0.2 0.
K=0.6
K=0.6
North-Southmode
Adverse controlInteraction mode
5%Determining Kmin for 5% Security Boundary

48
Hopf Bifurcation Results
0.0
0.4
0.8
1.2
1.6
2.0
-0.8 -0.6 -0.4 -0.2 0.
K=0.6
K=0.6
North-Southmode
Adverse controlInteraction mode
5%Determining Kmin for 5% Security Boundary

49
Hopf Bifurcation Results
0.0
0.4
0.8
1.2
1.6
2.0
-0.8 -0.6 -0.4 -0.2 0.
K=0.6
K=0.6
North-Southmode
Adverse controlInteraction mode
5%Determining Kmin for 5% Security Boundary

50
Hopf Bifurcation Results
0.0
0.4
0.8
1.2
1.6
2.0
-0.8 -0.6 -0.4 -0.2 0.
K=0.6
K=0.6
North-Southmode
Adverse controlInteraction mode
5%
K=0.0647
Determining Kmin for 5% Security Boundary

51
Hopf Bifurcation Results
0.0
0.4
0.8
1.2
1.6
2.0
-0.8 -0.6 -0.4 -0.2 0.
K=0.6
K=0.6
North-Southmode
Adverse controlInteraction mode
5%Determining Kmax for 5% Security Boundary

52
Hopf Bifurcation Results
0.0
0.4
0.8
1.2
1.6
2.0
-0.8 -0.6 -0.4 -0.2 0.
K=0.6
K=0.6
North-Southmode
Adverse controlInteraction mode
5%Determining Kmax for 5% Security Boundary

53
Hopf Bifurcation Results
0.0
0.4
0.8
1.2
1.6
2.0
-0.8 -0.6 -0.4 -0.2 0.
K=0.6North-South
mode
Adverse controlInteraction mode
5%Determining Kmax for 5% Security Boundary
K=0.6

54
Hopf Bifurcation Results
0.0
0.4
0.8
1.2
1.6
2.0
-0.8 -0.6 -0.4 -0.2 0.
K=0.6North-South
mode
Adverse controlInteraction mode
5%Determining Kmax for 5% Security Boundary
K=0.6

55
Hopf Bifurcation Results
0.0
0.4
0.8
1.2
1.6
2.0
-0.8 -0.6 -0.4 -0.2 0.
K=0.6North-South
mode
Adverse controlInteraction mode
5%Determining Kmax for 5% Security Boundary
K=0.6

56
Hopf Bifurcation Results
0.0
0.4
0.8
1.2
1.6
2.0
-0.8 -0.6 -0.4 -0.2 0.
K=0.6North-South
mode
Adverse controlInteraction mode
5%Determining Kmax for 5% Security Boundary
K=0.6

57
Hopf Bifurcation Results
0.0
0.4
0.8
1.2
1.6
2.0
-0.8 -0.6 -0.4 -0.2 0.
K=0.6North-South
mode
Adverse controlInteraction mode
5%Determining Kmax for 5% Security Boundary
K=0.6

58
Hopf Bifurcation Results
0.0
0.4
0.8
1.2
1.6
2.0
-0.8 -0.6 -0.4 -0.2 0.
K=0.6North-South
mode
Adverse controlInteraction mode
5%
K=2.1172
Determining Kmax for 5% Security Boundary
K=0.6

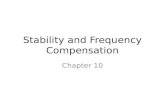
59
Hopf Bifurcations Results
• Two crossings of the security boundary were found, for POD gains far away from the nominal values (Knom = 0.6 pu):
2.1172 > K > 0.0647
• Computational cost of Hopf bifurcation algorithm
– Single-parameter changes : 0.16 s (per iteration)
– Multiple-parameter changes : 0.35 s (per iteration)

60
Step Responses for Different TCSC Gains: Knom = 0.6 and Kmin = 0.06471
-0.9
-0.8
-0.7
-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0.
0.1
0. 5. 10. 15. 20.Time (s)
Nominal Gain Minimum Gain
ξ = 5 %
Freq = 0.171 Hz

61
Step Responses for Different TCSC Gains:Knom = 0.6 and Kmax = 2.1172
-0.9
-0.8
-0.7
-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0.
0.1
0. 5. 10. 15. 20.Time (s)
Nominal Gain Maximum Gain
ξ = 5 %
Freq = 0.0788 Hz

62
Jacobian Matrix for Brazilian System Model (13, 062 equations with 48,626 non-zeros )

63
Eigenvalue (Pole) Spectrum for Brazilian North-South System (1,676 eigenvalues)
-16
-12
-8
-4
0
4
8
12
16
-10 -8 -6 -4 -2 0Real Part (1/s)
Eigenvalue Spectrum

64
Hopf Matrix and its LU Factors (26,127 lines)
256,915 non-zeros108,288 non-zeros

65
Convergence Performance of the Hopf Algorithm (Kmin Solution)
0.0647119-0.053749 + j 1.073660.0647119-0.053749 + j 1.073650.0646849-0.053750 + j 1.073640.0596167-0.053862 + j 1.07593
0.00911156-0.055743 + j 1.113520.264483-0.049219 + j 0.9831510.600000-0.31793 + j 1.04370
Gains of the two PODsEigenvalue EstimateIteration

66
Convergence Performance of the Hopf Algorithm (Kmax Solution)
52.11725-0.024789 + j 0.49516752.11759-0.024790 + j 0.49518652.04841-0.024886 + j 0.497105
11.301.59247-0.059773 + j 0.52549421.301.14716-0.12364 + j 0.56710331.300.864511-0.19803 + j 0.60087241.300.727598-0.28045 + j 0.61841151.300.600000-0.34641 + j 0.579610
ζ (%)POD GainsEigenvalue EstimateIteration

67
Pole Spectrum of 1,676-State System
Small window near the origin is shown enlarged in next 3 slides
-16
-12
-8
-4
0
4
12
16
-10 -8 -6 -4 -2 0Real Part (1/s)
Eigenvalue Spectrum
8

68
Enlarged View of Small Window in the 1676-Pole Spectrum, for Knom = 0.6
0.00
0.40
0.80
1.20
1.60
2.00
-0.80 -0.60 -0.40 -0.20 0.00Real Part (1/s)
-0.31793 + 1.04375j

69
Enlarged View of Small Window in the 1676-Pole Spectrum, for Kmin = 0.06471
0.00
0.40
0.80
1.20
1.60
2.00
-0.8 -0.6 -0.4 -0.2 0Real Part (1/s)
-0.053777 + 1.0736j

70
Enlarged View of Small Window in the 1676-Pole Spectrum, for Kmax = 2.1172
0.00
0.40
0.80
1.20
1.60
2.00
-0.8 -0.6 -0.4 -0.2 0Real Part (1/s)
-0.024777 + 0.495155j

71
Conclusions
• Developed Hopf algorithm showed robust performance for large-scale systems
• Ensuring that all crossings of the security border have been determined is not an easy task for large-scale problems
• Finding the closest bifurcation point in the multi-parameter space requires optimization techniques (Minimum Distance to Hopf)
• Hopf algorithms and Minimum Distance to Hopf algorithms may be useful in the design of decentralized, non-linear controllers in power systems
• The authors have also been applying these algorithms to other problem areas.