Compliant Displacement Amplifier ISSN 2395-1621 and Analysis of Two Stage... · flexure beams 1, 2,...
7
www.ierjournal.org International Engineering Research Journal (IERJ) Special Issue 2 Page 3045-3051, 2015, ISSN 2395-1621 © 2015, IERJ All Rights Reserved Page 1 ISSN 2395-1621 Design and Analysis of Two Stage Compliant Displacement Amplifier #1 S. B. Hebli, #2 S. P. Deshmukh, #3 K. C. More 1 [email protected] 2 [email protected] 3 [email protected] # #13 Flora Institute of Technology, Pune, India #2 Sinhgad Academy of Engineering, Pune, India ABSTRACT ARTICLE INFO The compliant mechanism is a mechanism which gets its motion by the elastic deformation of its links. Paper presents design, analysis and development of XY scanning mechanism using compliant displacement amplifier. Piezoelectric actuators which are used in engineering applications have the disadvantage of having relatively short displacement of 2 mm. This displacement is not sufficient for many engineering applications. This disadvantage can be overcome by the use of a displacement amplification mechanism in connection with the piezoelectric actuators. A compliant displacement amplifier, when used with piezoelectric actuator achieves a long range displacement. The effects of the change in the geometrical dimensions of the compliant displacement amplifier on the amplification ratio are determined in this paper. Finally, the optimum design giving high amplification ratio and comparatively low input force is developed. Keywords— Compliant mechanism, Micro-electro-mechanical system, Micro-leverages mechanism, Piezoelectric actuator, Two stage displacement amplifier. Article History Received :18 th November 2015 Received in revised form : 19 th November 2015 Accepted : 21 st November , 2015 Published online : 22 nd November 2015 I. INTRODUCTION A compliant mechanism is a mechanism which gains its mobility from the elastic deformation of its members called flexures. Elastic deformations are within elastic limit. The compliant mechanisms are popular for their advantages like high precision, a lack of friction and wear at the joints, no need for lubrication and it has monolithic structure. Compliant micro-leverage mechanisms are used in micro- electro-mechanical system (MEMS) to transfer an input force/displacement to an output force/displacement to achieve mechanical (force) and/or geometrical (displacement) advantage. Agarwal et al. described working principles, design steps, synthesis process of compliant mechanism, its advantages and disadvantages, as in [11]. Author stated that the synthesis process was in two steps. First step in synthesis was a ‗topology synthesis‘. In this, a kinematic geometry was required to be constructed that will give the required displacement and force at output. The second step was ‗size and shape optimization‘. Author also stated two types of formulation. First was flexibility stiffness formulation and second energy efficiency formulation. Kota et al. presented a generalized methodology for designing a compliant mechanism. For this, author gave example of design of MEMS multiplier, as in [14]. Lin and Shih proposed technique of the mechanical flexure hinge design. To illustrate this, author gave an example of a compliant micro gripper as in [1]. Su elaborated on compliant micro leverage mechanism for MEMS and its governing laws (force and moment balance), classification (1st, 2nd, 3rd kind and S, D subtype), as in [15]. Author presented design theory of the force amplifier of 2nd kind. Author described about construction of single stage, two stage and multi stage micro leverage mechanisms.
Transcript of Compliant Displacement Amplifier ISSN 2395-1621 and Analysis of Two Stage... · flexure beams 1, 2,...

www.ierjournal.org International Engineering Research Journal (IERJ) Special Issue 2 Page 3045-3051, 2015, ISSN 2395-1621
© 2015, IERJ All Rights Reserved Page 1
ISSN 2395-1621
Design and Analysis of Two Stage
Compliant Displacement Amplifier
#1S. B. Hebli,
#2S. P. Deshmukh,
#3K. C. More
[email protected] [email protected] [email protected]
#
#13Flora Institute of Technology, Pune, India
#2Sinhgad Academy of Engineering, Pune, India
ABSTRACT
ARTICLE INFO
The compliant mechanism is a mechanism which gets its motion by the elastic
deformation of its links. Paper presents design, analysis and development of XY
scanning mechanism using compliant displacement amplifier. Piezoelectric actuators
which are used in engineering applications have the disadvantage of having relatively
short displacement of 2 mm. This displacement is not sufficient for many engineering
applications. This disadvantage can be overcome by the use of a displacement
amplification mechanism in connection with the piezoelectric actuators. A compliant
displacement amplifier, when used with piezoelectric actuator achieves a long range
displacement. The effects of the change in the geometrical dimensions of the compliant
displacement amplifier on the amplification ratio are determined in this paper. Finally,
the optimum design giving high amplification ratio and comparatively low input force is
developed.
Keywords— Compliant mechanism, Micro-electro-mechanical system, Micro-leverages
mechanism, Piezoelectric actuator, Two stage displacement amplifier.
Article History
Received :18th
November
2015
Received in revised form :
19th
November 2015
Accepted : 21st
November ,
2015
Published online :
22nd
November 2015
I. INTRODUCTION
A compliant mechanism is a mechanism which gains its
mobility from the elastic deformation of its members called
flexures. Elastic deformations are within elastic limit. The
compliant mechanisms are popular for their advantages like
high precision, a lack of friction and wear at the joints, no
need for lubrication and it has monolithic structure.
Compliant micro-leverage mechanisms are used in micro-
electro-mechanical system (MEMS) to transfer an input
force/displacement to an output force/displacement to
achieve mechanical (force) and/or geometrical
(displacement) advantage.
Agarwal et al. described working principles, design steps,
synthesis process of compliant mechanism, its advantages
and disadvantages, as in [11]. Author stated that the synthesis
process was in two steps. First step in synthesis was a
‗topology synthesis‘. In this, a kinematic geometry was
required to be constructed that will give the required
displacement and force at output. The second step was ‗size
and shape optimization‘. Author also stated two types of
formulation. First was flexibility stiffness formulation and
second energy efficiency formulation. Kota et al. presented a
generalized methodology for designing a compliant
mechanism. For this, author gave example of design of
MEMS multiplier, as in [14]. Lin and Shih proposed
technique of the mechanical flexure hinge design. To
illustrate this, author gave an example of a compliant micro
gripper as in [1].
Su elaborated on compliant micro leverage mechanism for
MEMS and its governing laws (force and moment balance),
classification (1st, 2nd, 3rd kind and S, D subtype), as in
[15]. Author presented design theory of the force amplifier of
2nd kind. Author described about construction of single
stage, two stage and multi stage micro leverage mechanisms.

www.ierjournal.org International Engineering Research Journal (IERJ) Special Issue 2 Page 3045-3051, 2015, ISSN 2395-1621
© 2015, IERJ All Rights Reserved Page 2
Author also presented detail synthesis of resonant output
accelerometer.
Many literatures discussed about the topology design but
not the size and shape optimization, so I decided to work on
design and synthesis of a two stage compliant displacement
amplifier connected to XY mechanism. Objective of the
paper was to design a compliant amplifier in two stages for
geometrical advantage around 6. It was optimized for its
maximum amplification factor.
Paper presents design, analysis and development of
compliant amplifier based XY mechanism. Section 2
presents concept of displacement amplification and design of
compliant displacement amplifier with XY mechanism.
Section 3 presents synthesis of mechanism and results of
analytical analysis are compared with FEA analysis. Section
4 presents experimental implementation and its validation.
Section 5 presents conclusion and futures scope of work.
II. XY COMPLIANT MECHANISM
A XY compliant mechanism design is shown in Fig.1.
Flexure units 1, 2, 3 and 4 are the beams. There are four
stages in this mechanism. These are (i) fixed stage, (ii) the
motion stage, and (iii) (iv) two intermediate stages. The
necessary force (Fx and Fy) is applied at two intermediate
stages by the actuators. This gives motion to the motion
stage in two perpendicular directions (as X and Y directions).
Fig. 1 XY mechanism
2.1 Displacement Amplifier
Compliant displacement amplifier consists of lever arm, a
pivot with a pivot beam, output system with output
connection beam and input system. The lever is a rigid
member while pivot beam and connection beam are
compliant members. They are further classified as
1) Single stage
2) Two stage
3) Multi stage.
Fig. 2 Single stage displacement amplifier
If L is distance between pivot and input and l is distance
between pivot and output The amplification factor of single
stage displacement amplifier as shown in fig. 2, is given by
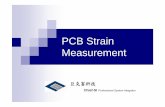
y/x =l/L. The selected amplifier is a two stage displacement
amplifier connected to XY mechanism as shown in
photograph in fig. 3. The amplification factor of two stage
displacement amplifier is given by y/x = (l1/L1) X (l2/L2). It
has lever length fixed to 90 mm. L = 25 mm, l = 65 mm and
amplification ratio of 2.6 per stage (l/L), giving overall
theoretical amplification ratio as 2.6 X 2.6 = 6.76. For
amplifier, pivot beams and output connection beams are
around 0.5 mm thick, 10 mm in width, length 25 mm with
circular arc cut (radius 18 mm) along length and giving
minimum width at center of length as 4 mm.
2.2 Design of XY Mechanism
XY mechanism is connected with two stage displacement
amplifier at X and Y directions as shown in fig. 3. The
flexure beams 1, 2, 3, 4 are of 10 mm width and around 0.5
mm thick.
Fig. 3 Photograph of the model
First maximum output displacement (δout) at motion stage
and required force ‗W‘ for XY mechanism i.e. output force
Fout is calculated then calculations are done from output to
input in reverse direction. For amplifier design, first, second
stage (top) is designed. Then first stage (bottom) is designed.
Finally input force and input displacement is found out.

www.ierjournal.org International Engineering Research Journal (IERJ) Special Issue 2 Page 3045-3051, 2015, ISSN 2395-1621
© 2015, IERJ All Rights Reserved Page 3
I. 3. SYNTHESIS
Synthesis of a compliant mechanism is different than a traditional mechanism and also it is difficult.
3.1 Displacement Amplifier
In a compliant mechanism, the total strain energy is the
summation of the strain energies of the individual parts of
the entire mechanism. The work done (Uin(Total)) by the input
force (Fin1) is equal to the tensile/compression strain energy
(Uvo, Uvp, Uxy) at output connection beam, pivot beam and
beams of the XY mechanism and the moment-bending strain
energy at the output connection beam, pivot beam, xy
mechanism (Uθc, Uθp , Uxy). It is shown in the following
equations.
Uvo = Fout*δout, / 2
(1)
Uvp = Kvp*δ2/2
(2)
Uθp= Kθp*θ2 /2
(3)
Uxy = Kθo* θxy(actual)2 /2
(4)
Uin (Total) = Uvo1+Uvp1+Uθp1+Uθc1+ Uvo+Uvo2+Uvp2 +Uθp2 +
Uθc2 + Uxy (5)
Fin1=2*Uin (Total) / δin,1
(6)
Where,
δin,1 = Input displacement at first stage
δout = Output displacement
δ = Elongated/compressed length of pivot beam
θ = The rotation angle of the lever arm when loaded
θxy = The rotation angle of the beam of the xy mechanism
K = stiffness of pivot beam (Kvp, Kθp)/output connection
beam (Kvc, Kθc )/output system (Kθo), either vertical or
rotational
3.1.1 Calculation of input displacement δin,1 and output
displacement δout,2 ( For inward direction of input force)
δx p1= lp1-x p1
(7)
Similar calculations for Second stage pivot beam P2.
For certain output displacement, input displacement is given
by,
δin, 1 (actual) = 90/65(δx p1+25*δx p2/65) + δin, 1 (theoretical)
(8)
3.1.2 Calculation of input displacement δin,1 and output displacement δout,2 ( For outward direction of input force)
In this case output connection beam C1 is in compression. Due to compression and bending (considering cantilever loading) its length is reduced and so the actual displacements are reduced. Beams under tension are ignored.
Input displacement is given by,
δin, 2 (actual) = δout, 2 (actual)*L2 / l2
(9)
δout,1 (actual) = δin,2 (actual) + ( Reduction in length of output
connection beam C1)
(10)
δin, 1 (actual) = δout, 1 (actual)*L1 / l1
(11)
3.2 XY Mechanism
First maximum load (W(max)) and maximum deflection
(δxy(max)) on XY mechanism is calculated. Then vertical (kvo)
and rotational (kθo) spring constants of XY mechanism i.e.
external output system are calculated.
Vertical spring constant and bending spring constant of XY mechanism is given by
kvo = W (max) /δxy (max)
(12)
kθo 1 = E*Ixy1 / lxy1 (13)
kθo 2 = E*Ixy2 / lxy2 (14)
kθo = kθo 1 + kθo 2 (15)
3.3 Results
For the proposed displacement amplifier connected to XY
mechanism, the analytical calculations are done for requited
output displacement and corresponding input displacement,
input force and maximum stress is calculated as presented in
Table I.
In further analytical analysis, the lever ratio l / L i.e. lever
ratio 65 / 25 was kept constant. Only the sizes of both pivot
beams and both connection beams i.e. length, thickness and
width were varied one by one. Analysis was done for three
parameters that are output displacement means amplification
ratio, input force and maximum stress. For all this analysis,
the output displacement was kept constant and equal to 2
mm. Analysis was done for both inward and outward
direction of input force. The graphs were plotted for each and
every calculation.
TABLE I
ANALYTICAL RESULTS FOR INWARD DIRECTION OF INPUT
FORCE
δout
(mm)
δin
(mm)
Input
Force
(N)
Amplification
Ratio
Max
Stress
(N/mm2)
0.17 0.03 3.03 5.16 16.19
0.68 0.13 12.05 5.12 64.77
1.09 0.21 19.24 5.09 103.83
2.17 0.43 38.17 5.01 206.72
3.17 0.64 55.96 4.94 302.01
4.16 0.85 74.17 4.87 396.38
5.02 1.04 90.71 4.82 478.39
5.8 1.22 106.46 4.76 552.81

www.ierjournal.org International Engineering Research Journal (IERJ) Special Issue 2 Page 3045-3051, 2015, ISSN 2395-1621
© 2015, IERJ All Rights Reserved Page 4
Amplifier size was optimized for maximum amplification
ratio, minimum input force and minimum maximum stress.
Table II presents the optimum amplifier sizes and some
of the properties that the various beams should possess for
the maximum output displacement and minimum input force.
TABLE III
OPTIMUM SIZE OF THE AMPLIFIER
Size
(mm)
Out-
ward
Remark In-
ward
Remark Property
lc2 50 High 50 High
compliant tc2 0.1 Low 0.4 Low
bc2 0.5 Low 1 Low
lp2 30 High 40 High
compliant tp2 0.1 Low 0.4 Low
bp2 0.5 Low 3 Low
lc1 30
Low /
Medium 200 High Medium
stiff –
outward
compliant
– inward tc1 1.5
High /
Medium 0.1 Low
bc1 10
High /
Medium 0.5 Low
lp1
any
(25) any 15
Low/
Medium Medium
stiff –
inward
compliant
–
outward
tp1 0.4 Low 1
High /
Medium
bp1
any
(10) any 20
High /
Medium
3.4 FEA Results
FEA modeling and analysis was done on ansys software.
It was done only on actual model for applying input force as
a variable. Force was applied in both directions i.e. inward
and outward. The parameters to be checked were input
displacement, output displacement, amplification ratio,
maximum stresses (Von Misses stresses) developed and its
location. The following readings were observed on ansys
and are presented in Table III. The readings are exactly
same for both inward and outward direction of input force.
TABLE IIIII
ANSYS RESULTS FOR BOTH DIRECTIONS OF INPUT FORCE
δout
(mm)
δin
(mm)
Amplific-
ation
ratio
Input
Force
(N)
Max
Stress
(N/mm2)
0.1 0.02 5.76 4 15
0.52 0.09 5.76 20 75
1.02 0.18 5.76 40 150
1.55 0.27 5.76 60 225
2.05 0.36 5.76 80 301
2.6 0.45 5.76 100 376
3.1 0.54 5.76 120 451
3.4 0.59 5.76 130 489
Ansys analysis shows the same values of input
displacement, amplification ratio and maximum stress for
both inward as well as outward direction of input force.
Ansys also shows that maximum output displacement
possible is 3.4 mm only.
Fig. 4 Amplification ratio Vs input displacement graph for
FEA results
Graph in fig. 4 shows that amplification ratio remains
constant and equals to 5.76, for both directions of input
force.
III. EXPERIMENTATION
The model was manufactured from material stainless steel.
It was fabricated as a monolithic structure and cut from a
single metal plate of 10 mm thick on wire cutting electro
discharge machine.
4.1 Experimental set up
Force was applied in both directions i.e. inward and
outward directions. For loading in outward direction, the
pan was attached to input point by string and weights were
added in it as input force as shown in Fig. 5. The input
displacement was measured by dial gauge and output
displacement was measured by micrometer head. For
inward direction of input force, force measurement was not
taken. Only input and output displacements were measured.
Input displacement was given by micrometer head and also
measured by the same. Output displacement was measured
by dial gauge.

www.ierjournal.org International Engineering Research Journal (IERJ) Special Issue 2 Page 3045-3051, 2015, ISSN 2395-1621
© 2015, IERJ All Rights Reserved Page 5
Fig. 5 Photograph of experimental set up
4.1 Results
Experimental observations for outward direction of input
force are presented in Table IV.
TABLE IVV
EXPERIMENTAL OBSERVATIONS FOR OUTWARD DIRECTION OF
INPUT FORCE
δout
(mm)
δin
(mm)
Input
force
(N)
Amplification
ratio
0.08 0.02 3.53 3.91
0.55 0.14 11.38 3.89
1.03 0.27 27.07 3.87
1.53 0.4 40.22 3.84
1.78 0.46 52 3.83
The following graphs show the comparison between
analytical, ansys and experimental results.
4.1.1 Comparison between input force (For outward
direction of input force)
Fig. 6 Comparison between input force (For outward
direction of input force)
Graph in fig. 6 shows that analytical values of input force
are at lower side and values by ansys are at higher side of
that of experimental results.
4.1.2 Comparison between amplification ratio (For outward
direction of input force)
Fig. 7 Comparison between amplification ratio (For outward
direction of input force). (Graphs of analytical and
experimental coincide)
Graphs of analytical and experimental values of
amplification ratios in fig. 7 coincide and are around 3.9 and
are constant. Ansys shows high amplification ratio and is
5.76.
4.1.3 Comparison between input force (For inward
direction of input force)
Graph in fig. 8 shows that ansys gives higher values than
analytical one and both graphs are linearly increasing.
Experimental reading for input force was not taken.

www.ierjournal.org International Engineering Research Journal (IERJ) Special Issue 2 Page 3045-3051, 2015, ISSN 2395-1621
© 2015, IERJ All Rights Reserved Page 6
Fig. 8 Comparison between input force
(For inward direction of input force)
4.1.4 Comparison between amplification ratio (For
inward direction of input force)
Fig. 9. Comparison between amplification ratio
(For inward direction of input force)
shown in fig. 9, the graph of experimental values of
amplification ratio is at lower side at the beginning. It
coincides with analytical values after 2 mm of output
displacement. It may be due to predominant bending of the
pivot beams at the beginning.As
IV. CONCLUSIONS
The investigations have been done for two stage
displacement amplifier with XY mechanism. The simulated
and analytical results are in agreement with experimental
results. The ideal amplification ratio was 6.76 and was
found to be 4.85 by experiment for inward direction of input
force and 3.86 by experiment for outward direction of input
force. The amplification ratio was found to be 5.0 and 3.9
for inward and outward direction of input force respectively
analytically, which is 1% to 3% greater than the
experimental one. It also shows that the required input force
is more than the theoretical one. Maximum stress was found
at 3.4 mm of output displacement by FEA and 5 mm of
output displacement by analytical method and at the same
location i.e. output connection beam of second stage.
It concludes that the first stage must be stiff than the
second stage to have maximum amplification. At the same
time the first stage should be compliant enough to reduce
the input force requirement. The first stage geometry is
affecting severely on the input force, amplification ratio and
maximum stress of the amplifier.
In this paper length, width, thickness of beams are varied
and its effect on amplification ratio, input force, maximum
stress is studied but not of the lever ratio (l/L). In future, the
effect of lever ratio (l/L) can be studied and optimum lever
ratio (l/L) can be found out. Pivot beam and connection
beam have radius and they are acting as a hinges. Hinge
design also required to be studied.
ACKNOWLEDGMENT
I am thankful to Dr. Atul S. Padalkar, Principal, Flora
Institute of Technology, for guiding me for the technical
structure of the paper and helping me for the successful
completion of this paper. At the same time I express my
gratefulness towards Prof. Sudheendra Subramanya, Head
of Department, Mechanical Engineering Department, Flora
Institute of Technology, for the cooperation.
I have to mention my sincere thanks to Prof Sushant
Mulay and Prof Sujeetkumar Patil of Cad Cam Guru, for
giving me software support. Many thanks go to Mr. Vijay
Jadhav for helping me in fabrication of project model on
wire cutting electro discharge machine. Also thanks goes to
Mr. Pravin Hawaldar who helped me in constructing
experimental setup of this dissertation.
Finally I am grateful to all those who have assisted me in
accomplishing this paper, directly or indirectly.
REFERENCES
[1] C. F. Lin, and C. J. Shih, ―A post design of topology optimization for mechanical complaint amplifier in MEMS,‖ Tamkang J. of Sci. and Eng., Vol. 9, No. 3, pp. 215-222, 2006.
[2] G. Krishnan, and G. K. Ananthasuresh, ―Evaluation and design of displacement amplifying compliant mechanism for sensor applications,‖ J. Mech. Design, Vol. 130, pp.102304-1 – 102304-9, Oct. 2008.
[3] J. Li, Z. S. Liu, C. Lu, Q. X. Zang, and A. Q. Liu, ―A self limited large displacement ratio micromechanical amplifier,‖ in 13th International Conference on Solid State Sensors, Actuators and Micro systems, Seoul, Korea, 2005, pp. 725-728.
[4] J. M. Acob, P. Vangjel and P. R. Ouyang, ―Optimization of a compliant mechanical amplifier based on symmetric five bar topology,‖ in 5th International Conference, ICIRA, Montreal, Canada, 2012, pp323-332.

www.ierjournal.org International Engineering Research Journal (IERJ) Special Issue 2 Page 3045-3051, 2015, ISSN 2395-1621
© 2015, IERJ All Rights Reserved Page 7
[5] K. J. Lu and S. Kota, ―Design of complaint mechanisms for morphing structural shapes,‖ J. Intell. Mater. Syst. and Structures, Vol. 14, pp. 379-391, 2003.
[6] M. Grossard, C. Rotinat-Libersa and N. Chaillet, ―Gramian based optimal design of a dynamic stroke amplifier compliant micro mechanism,‖ in Intelligent Robots and Systems, San Diego, CA, 2007, pp. 40007-4012.
[7] M. Grossward, C. Rotinat-Libersa, M. Boukallel, and N. Chaillet, ―A new topological optimization method for the mechanical and control oriented design of compliant piezoelectric devices,‖ in 8th World Congress on Structural and Multidisciplinary Optimization, Lisbonne, Portugal, 2009, pp. 1-10.
[8] N. Lobontiu and G. Ephrahin, (2003, July 24), ―Analytical model of displacement amplification and stiffness optimization for a class of flexure based compliant mechanism,‖ (1
st ed.) [Online]. Available:
http://www.sciencedirect.com.
[9] P. R. Ouyang, W. J. Zang and M. M. Gupta, ―A new complaint mechanical amplifier based on symmetric five bar topology,‖ J. Mech. Design, Vol. 130, pp.104501-1 - 104501-5, Oct. 2008.
[10] P. R. Oyuyang, W. J. Zhang and M. M. Gupta, ―Design of a new complaint mechanical amplifier,‖ in International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Long Beach, California, 2005, pp. 1-10.
[11] R. Agarwal, B. Shah, and E. Zimney, ―Compliant mechanisms and MEMS,‖ North Western Univ., Evanston, IL, Rep. ME 381, Dec. 3, 2004.
[12] S. Awtar, ―Synthesis and Analysis of Parallel Kinematic XY Flexure Mechanisms,‖ Ph.D. Dissertation, Dept. Mech. Eng., Massachusetts Institute of Technology, Cambridge, M.A., 2003.
[13] S. Bharati, and M. Frecker, ―Complaint mechanical amplifier design, using multiple optimally placed actuator,‖ in International Mechanical Engineering Congress, Washington, D.C., 2003, pp. 1-8.
[14] S. Kota, J. Hetrick, Z. Li and L. Saggere, ―Tailoring unconventional actuators using complaint transmissions design methods and applications,‖ IEEE/ASME Trans. Mechatron., , Vol. 4, No. 4, pp. 396-408, Dec. 1999.
[15] S. X. Su, ―Compliant lever arm mechanism design for MEMS applications,‖ Ph.D. Dissertation, Dept. Mech. Eng., Univ. of California, Berkeley, 2001.
[16] Z. Dan, G. Zen, M. Matteo and C. Gianmarc, ―A novel flexure parallel micromanipulator based on multilevel displacement amplifier,‖ in 3rd International Conference on Sensor Device Technologies and Applications, Rome, Italy, 2012, pp. 31-37.