The Dynamics of the Pendulum By Tori Akin and Hank Schwartz.

Assignment 2Modeling of Kapitza pendulum
Edvin Listo [email protected]
920625-2976
August 28, 2014
Co-workers: Emma Ekberg, Sofia Toivonen

1 Q1 - Frequency and stabilityThe movement of a Kapitza pendulum can be described by the differentialequation
θ = −[g +Aω2 cos(ωt)]sin θ
l. (1)
This is a nonlinear differential equation due to the sin θ factor. We let z = ωtto arrive at a non-dimensional form. This gives us the Mathieu equation:
d2θ
dz2= −[a− ε cos(z)] sin θ (2)
where a = glω2 and ε = A
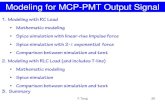
l . Numerically we found that for ω close to 157 thependulum was stable with initial values close to θ = π and θ = 0. The length wasl = 0.5 m, amplitude A = 0.02 m. Gravity was set at g = 9.81 m/s2 throughoutthe whole assignment.
Figure 1: ω = 100 Figure 2: ω = 150
Figure 3: ω = 157 Figure 4: ω = 200
1

2 Q2 - Destabilization of the downward orienta-tion
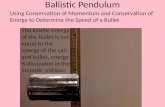
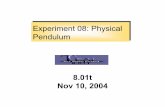
In this question we investigated wheter or not we could make the downwardposition of the Kapitza pendulum destabilize. We started at θ = 0.1 and θ = 0.1.This time we had the length l = 3 m and the amplitude A = 0.1 m. We finallyfound that for ω > 37 the pendulum swung more than π radians. In figures 5,6, 7 one can see the stable and unstable conditions.
Figure 5: ω = 20 Figure 6: ω = 37
Figure 7: ω = 40
3 Q3 - Stability of solutions to Mathieu equationEquation 2 may be exact, it is however not solveable analytically. That is whywe get rid of the nonlinearity by approximating it with linearization. Letting
2

sin θ = θ near the fixed points θ = 0 and θ = π gives us the Mathieu equation:
x+ (a− ε cos t)x = 0 . (3)
We solved this differential equation in MATLAB for many different a and ε andused the Floqet theory to create a fundamental matrix Φ(t), where Φ(0) is theidentity matrix. We then calculated the monodromy matrix M = Φ−1(0)Φ(T ),with T = 2π. The characteristic multipliers of the system are eigenvalues of themonodromy matrix, resulting in the equation below:
µ2 − (Trace(Φ(T )) + det(Φ(T )) = 0 (4)
Equation 4 has the solutions γ(a, ε) = Trace(Φ(T )), µ1,2 = 12 [γ ±
√γ2 − 4].
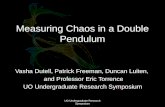
Since the system is stable for characteristic multipliers less than one we look fora trace less than two. We now plotted a on one axis and ε on the other.
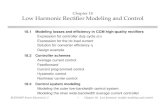
Figure 8: Stability diagram for the downward and upward positions. The en-closed region of the blue circles show where the system is stable.
The only difference between the upward and downward equations is a plus/mi-nus sign in the Mathieu equation. One can see that for the downward position,the system is stable for larger a than for the upward position. This result co-incides with the previous, numerical results for ω for the different positions ofthe pendulum.
3

4 Matlab codev1=[1,0];v2=[0,1];
t=linspace(0,2*pi,50);a=linspace(-1,5,50);epsilon=linspace(-3,3,50);
E=cell(2,length(a));
for k=1:length(a)for j=1:length(epsilon)
[T,Q1]=ode45(@(t2,v)mathieu(t2,v,a(k),epsilon(j)),t,v1);[T,Q2]=ode45(@(t2,v)mathieu(t2,v,a(k),epsilon(j)),t,v2);
E{j}=[Q1(end,:);Q2(end,:)]; % This is the monodromy matrix
% Here we calculate the characteristic multipliers,% i.e. the eigenvaluesmy_1(k,j)=1/2*(trace(E{j}))+(sqrt((((1/2)*trace(E{j}))^2-det(E{j}))));my_2(k,j)=1/2*(trace(E{j}))-(sqrt((((1/2)*trace(E{j}))^2-det(E{j}))));
% Here we check the stability conditionsif (abs(my_1(k,j)) <= 1 && abs(my_2(k,j)) <=1 )
plot(a(k),epsilon(j),’o’);hold on
elseif abs(trace(E{j}))<=2plot(a(k),epsilon(j),’o’);hold on
endend
end
xlabel(’a’)ylabel(’\epsilon’)axis([-1,5,-3,3])
4