arXiv:2104.07859v1 [math.PR] 16 Apr 2021
69
THE BROWN MEASURE OF A FAMILY OF FREE MULTIPLICATIVE BROWNIAN MOTIONS BRIAN C. HALL AND CHING-WEI HO Abstract. We consider a family of free multiplicative Brownian motions bs,τ parametrized by a real variance parameter s and a complex covariance param- eter τ. We compute the Brown measure μs,τ of ubs,τ , where u is a unitary element freely independent of bs,τ . We find that μs,τ has a simple structure, with a density in logarithmic coordinates that is constant in the τ -direction. These results generalize those of Driver–Hall–Kemp and Ho–Zhong for the case τ = s. We also establish a remarkable “model variation phenomenon,” stating that all the Brown measures with s fixed and τ varying are related by push-forward under a natural family of maps. Our proofs use a first-order nonlinear PDE of Hamilton–Jacobi type sat- isfied by the regularized log potential of the Brown measures. Although this approach is inspired by the PDE method introduced by Driver–Hall–Kemp, our methods are substantially different at both the technical and conceptual level. Contents 1. Introduction 2 1.1. Additive and multiplicative models and their large-N limits 2 1.2. Random matrices and the Brown measure 4 1.3. Formula for the Brown measure 5 1.4. Relating different values of τ 7 1.5. The method of proof 8 1.6. Table of notation 8 2. Set-up and statement of results 10 2.1. The free Brownian motions 10 2.2. Main results 12 3. The domains Σ s and Σ s,τ 16 3.1. The domain Σ s 16 3.2. The domain Σ s,τ 18 3.3. Behavior of f s-τ on the boundary of Σ s 19 3.4. Injectivity of f s-τ on the complement of Σ s 23 3.5. The characterization of Σ s,τ 25 4. The PDE for S 26 4.1. The main result 26 4.2. A discussion of our approach 27 4.3. Itˆ o rules 28 4.4. The PDE with respect to r 29 4.5. The PDE with respect to τ 31 5. The Hamilton–Jacobi analysis 31 1 arXiv:2104.07859v2 [math.PR] 5 Jan 2022
Transcript of arXiv:2104.07859v1 [math.PR] 16 Apr 2021
![Page 1: arXiv:2104.07859v1 [math.PR] 16 Apr 2021](https://reader034.fdocument.org/reader034/viewer/2022042718/62676707814e77464c2343d3/html5/thumbnails/1.jpg)
THE BROWN MEASURE OF A FAMILY OF FREE
MULTIPLICATIVE BROWNIAN MOTIONS
BRIAN C. HALL AND CHING-WEI HO
Abstract. We consider a family of free multiplicative Brownian motions bs,τparametrized by a real variance parameter s and a complex covariance param-eter τ. We compute the Brown measure µs,τ of ubs,τ , where u is a unitary
element freely independent of bs,τ . We find that µs,τ has a simple structure,
with a density in logarithmic coordinates that is constant in the τ -direction.These results generalize those of Driver–Hall–Kemp and Ho–Zhong for the case
τ = s.
We also establish a remarkable “model variation phenomenon,” stating thatall the Brown measures with s fixed and τ varying are related by push-forward
under a natural family of maps.
Our proofs use a first-order nonlinear PDE of Hamilton–Jacobi type sat-isfied by the regularized log potential of the Brown measures. Although this
approach is inspired by the PDE method introduced by Driver–Hall–Kemp,our methods are substantially different at both the technical and conceptual
level.
Contents
1. Introduction 21.1. Additive and multiplicative models and their large-N limits 21.2. Random matrices and the Brown measure 41.3. Formula for the Brown measure 51.4. Relating different values of τ 71.5. The method of proof 81.6. Table of notation 82. Set-up and statement of results 102.1. The free Brownian motions 102.2. Main results 123. The domains Σs and Σs,τ 163.1. The domain Σs 163.2. The domain Σs,τ 183.3. Behavior of fs−τ on the boundary of Σs 193.4. Injectivity of fs−τ on the complement of Σs 233.5. The characterization of Σs,τ 254. The PDE for S 264.1. The main result 264.2. A discussion of our approach 274.3. Ito rules 284.4. The PDE with respect to r 294.5. The PDE with respect to τ 315. The Hamilton–Jacobi analysis 31
1
arX
iv:2
104.
0785
9v2
[m
ath.
PR]
5 J
an 2
022
![Page 2: arXiv:2104.07859v1 [math.PR] 16 Apr 2021](https://reader034.fdocument.org/reader034/viewer/2022042718/62676707814e77464c2343d3/html5/thumbnails/2.jpg)
2 BRIAN C. HALL AND CHING-WEI HO
5.1. The complex-time Hamilton–Jacobi formulas 315.2. Ordinary Hamilton–Jacobi method 325.3. Proof of the main theorem 355.4. The ε0 = 0 case 356. Outside the domain 376.1. Outline 376.2. Details 387. Inside the domain 407.1. Outline 407.2. Surjectivity 437.3. Computation of the Brown measure inside the domain 488. Relating different values of τ 528.1. The maps 538.2. The derivative of the density of the Brown measure 558.3. Pushing forward the Brown measure from τ = s 568.4. Proof of the push-forward property 588.5. The proof of Theorem 7.8 59Appendix A. A factorization of bs,τ 60A.1. Factoring with a free unitary Brownian motion 61A.2. Varying τ with s fixed 63A.3. The proof of the main result 66Appendix B. Continuous dependence of bs,τ on τ 67B.1. Acknowledgments 68References 68
1. Introduction
1.1. Additive and multiplicative models and their large-N limits. Themost basic random matrix models, such as the Gaussian unitary ensemble andthe Ginibre ensemble, are described by Gaussian measures. Thus, in light of thecentral limit theorem, such a model can be thought of as arising as the sum of alarge number of small independent, identically distributed random matrices. Moreexplicitly, a Gaussian random matrix model can be described in terms of Brownianmotion in the appropriate vector space of matrices.
It is then natural to consider “multiplicative” random matrix models, whichare constructed as products of independent random matrices that are close to theidentity. More explicitly, we can consider random matrix models arising from a left-invariant Brownian motion in some group of invertible matrices, such as the unitarygroup U(N) or the general linear group GL(N ;C). For such a Brownian motion gt,the multiplicative increments, computed as g−1
s gt for s < t, are independent.In [3], Biane constructed the large-N limit of Brownian motions UNt in U(N),
the so-called free unitary Brownian motion ut, as an element of an operator algebrawith a trace. Biane then computed the law of ut, which is a probability measureνt on the unit circle. Zhong [36] then extended Biane’s result by computing thelaw of uut, where u is an arbitrary unitary element that is freely independent ofut. Meanwhile, in [4], Biane introduced a free multiplicative Brownian motion bt
![Page 3: arXiv:2104.07859v1 [math.PR] 16 Apr 2021](https://reader034.fdocument.org/reader034/viewer/2022042718/62676707814e77464c2343d3/html5/thumbnails/3.jpg)
BROWN MEASURE OF BROWNIAN MOTIONS 3
(denoted Λt in [4]). As conjectured by Biane and proved by Kemp [24], bt is thelarge-N limit, in the sense of ∗-distribution, of a Brownian motion BNt in GL(N ;C).
The paper [13] computed the Brown measure of bt. This Brown measure is sup-ported in a domain Σt introduced by Biane and has a special structure. It is alsorelated to the law νt of the free unitary Brownian motion. The results of [13] werethen extended by Ho and Zhong [23] to compute the Brown measure of ubt, whereu is an arbitrary unitary element freely independent of bt.
It is possible to study also a two-parameter family of Brownian motions inGL(N ;C), where the two parameters control the diffusion rates in the unitaryand positive directions. This family was introduced in the context of the Segal–Bargmann transform in [9, 18] and then used also in the large-N limit of the Segal–Bargmann transform in [11, 24, 22]. This family of Brownian motions was alsostudied from the point of view of random matrix theory (that is, looking at theeigenvalue distribution) in [26] and [21].
In [12], it was then noted that one can naturally include a third parameter thatcontrols the correlation between the unitary and positive diffusions. Accordingto [12, Theorem 3.2], this three-parameter family of Brownian motions is (up tomultiplying by a scalar process) the most general family of Brownian motions thatis invariant under the left action of GL(N ;C) and the right action of U(N). Seealso the work of Chan [8] on the large-N limit of the Segal–Bargmann transformassociated to this three-parameter family.
Following [12], it is convenient to describe these Brownian motions by one realparameter s and one complex parameter τ, where s controls the overall diffusionrate, while the real and imaginary parts of τ control the diffusion rate in the unitarydirection and the correlations between the unitary and positive diffusions. Thecomplex parameter τ is nonzero and satisfies
|τ − s| ≤ s.
See Section 2.1 for details of the parametrization. We therefore obtain a familyBNs,τ (r) of Brownian motions in GL(N ;C), where s and τ are parameters and r isthe time variable. In this paper, we will consider a “free” version bs,τ (r) of theseBrownian motions. For any r > 0, the ∗-distribution of bs,τ (r) is the same as thatof brs,rτ (1). It is therefore sufficient to consider the case r = 1 and we use thenotation
bs,τ := bs,τ (1). (1.1)
The case τ = s gives the “standard” free multiplicative Brownian motion bs, asdefined by Biane and denoted by Λs in [4, Section 4]. When τ is real, results ofKemp [24] show that bs,τ is the large-N limit of BNs,τ in the sense of ∗-distribution.We expect that this result extends in a straightforward way to general values of τ,but this has not been proved.
We then consider an arbitrary unitary element u freely independent of bs,τ (r)and we consider the element
ubs,τ . (1.2)
We let µs,τ denote the “Brown measure” of ubs,τ , as defined in Section 1.2. Webelieve that the Brown measure of ubs,τ coincides with the limiting eigenvalue dis-tribution of any random matrix model of the form UNBNs,τ —where UN is unitary
and limiting eigenvalue distribution of UN is the law of the unitary element u in
![Page 4: arXiv:2104.07859v1 [math.PR] 16 Apr 2021](https://reader034.fdocument.org/reader034/viewer/2022042718/62676707814e77464c2343d3/html5/thumbnails/4.jpg)
4 BRIAN C. HALL AND CHING-WEI HO
Figure 1. Comparison of the Brown measure of ubs,τ (left) with asimulation of the eigenvalues of the corresponding random matrixmodel (right). Shown for s = 1, τ = 1 + i/2, with the law of ugiving equal mass to the four points ±1 and ±i
(1.2)—but we have not proved this. Our belief is supported by numerical simula-tions of UNBNs,τ , as in Figure 1.
In this paper, we will compute the Brown measure µs,τ and find that it hasa remarkably simple structure, with a density in logarithmic coordinates that isconstant in the τ -direction. (See Section 1.3.) We will also establish a “modelvariation phenomenon” as follows. Suppose we vary the free random matrix modelubs,τ by varying τ with s and u fixed. Then the Brown measures µs,τ vary in asimple way: the Brown measures are all related by push-forward under a naturalfamily of maps. (See Section 1.4.) Assuming that the Brown measures are the sameas the limiting eigenvalue distributions of the associated random matrix models,this result represents a new phenomenon in random matrix theory: the limitingeigenvalue distribution of one model can be obtained by applying a plane map tothe eigenvalues of a different random matrix model.
After the first version of this paper was posted on the arXiv, Zhong [37] posteda preprint that obtains similar results in the additive case, using very differentmethods. Actually, Zhong’s results go beyond the additive analog of our results,in that he considers the sum of a rotated elliptic element Z (as in Section 2.1) andanother element that is freely independent of Z but otherwise arbitrary. This is incontrast to our results which rely heavily on the assumption that the element u in(1.2) is unitary.
1.2. Random matrices and the Brown measure. Girko’s method for deter-mining the eigenvalues of a non-normal random matrix Z consists of looking at thefunction
s(λ) :=1
Nlog(|det(Z − λ)|2) =
2
N
N∑j=1
log |λ− λj | ,
where λ1, . . . , λN are the eigenvalues of Z. Since 12π log |λ− λj | is the Green’s func-
tion of the Laplacian in the plane, we find that 14π time the Laplacian of s, computed
![Page 5: arXiv:2104.07859v1 [math.PR] 16 Apr 2021](https://reader034.fdocument.org/reader034/viewer/2022042718/62676707814e77464c2343d3/html5/thumbnails/5.jpg)
BROWN MEASURE OF BROWNIAN MOTIONS 5
in the distribution sense, is just the empirical eigenvalue distribution of Z:
1
4π∆s(λ) =
1
N
N∑j=1
δλj (λ).
It is then an elementary exercise to show that s may also be computed as
s(λ) =1
Ntrace [log((Z − λ)∗(Z − λ))] , (1.3)
where “log” denotes the self-adjoint logarithm of a self-adjoint, positive matrix.Meanwhile, pioneering work of Voiculescu developed an operator-algebra formal-
ism for understanding the large-N limits of random matrix models. Specifically, ifZN is a sequence of N × N random matrices (not necessarily Hermitian or evennormal) one looks for a von Neumann algebra A with a “trace” tr : A → C and anelement z of A such that
limN→∞
E{
1
Ntrace
[p(ZN , (ZN )∗
]}= tr [p(z, z∗)] (1.4)
for every polynomial p in two noncommuting variables. (Here tr is not the tracein the sense of trace-class operators, but is a linear functional having propertiessimilar to the normalized trace of matrices.) One indication of the power of thisapproach is the work of Voiculescu [34, 35], which showed that, under quite generalcircumstances, independent random matrices become freely independent in suchlimits. (See also Chapter 23 of [29] and Section 4.2 of [27].)
If z is an element of a tracial von Neumann algebra (A, tr), one can define theBrown measure of z [6] denoted µz, by imitating the preceding construction formatrices. (See also Chapter 11 of [27].) One first introduces a regularized analogof (1.3),
S(λ, ε) = tr[log((z − λ)∗(z − λ) + ε2)
], ε > 0, (1.5)
and then defines
S0(λ) = limε→0+
S(λ, ε).
The Brown measure µz is then 14π times the distributional Laplacian of S0:
µz =1
4π∆S0.
An important technical issue with this approach is that if even if ZN convergesto z in the sense described in (1.4), the empirical eigenvalue distribution of ZN
need not converge almost surely to the Brown measure of z. On the other hand,tools have been developed to show that, in many interesting cases, µx is indeed thelimiting eigenvalue distribution. We mention here work of Girko [15], Bai [1], Tao–Vu [33], and Guionnet–Krishnapur–Zeitouni [17], among others. (Although theseworks do not explicitly use the Brown measure terminology, they all use Girko’sapproach to computing the eigenvalue distribution in the large-N limit.)
1.3. Formula for the Brown measure. The first main result of this paper is acomputation of the following measure:
µs,τ = Brown measure of ubs,τ ,
where the answer will depend on the choice of the unitary element u. The caseτ = s corresponds to the Brown measure computed in [13, 23].
![Page 6: arXiv:2104.07859v1 [math.PR] 16 Apr 2021](https://reader034.fdocument.org/reader034/viewer/2022042718/62676707814e77464c2343d3/html5/thumbnails/6.jpg)
6 BRIAN C. HALL AND CHING-WEI HO
Figure 2. The Brown measure µs,τ in rectangular coordinates(left) and in logarithmic coordinates (right). Shown with u = 1,s = 3, and τ = 1 + i. The density in logarithmic coordinates isconstant in the τ -direction
We now briefly indicate the structure of the Brown measure, leaving a precisestatement of the results to Section 2. We first identify a certain open set Σs,τcontaining all the mass of the Brown measure µs,τ and then give a formula for thedensity of µs,τ on Σs,τ . We use the notation
τ = τ1 + iτ2, τ1, τ2 ∈ R,and introduce twisted logarithmic coordinates of a nonzero complex number λ,given as
v =1
τ1log |λ| ; δ = arg λ− τ2
τ1log |λ| . (1.7)
Then there is a smooth, increasing function φs,τ such that the Brown measure inΣs,τ is given by the formula
dµs,τ (λ) =1
2πτ1
1
|λ|2dφs,τ (δ)
dδdx dy, (1.8)
where λ = x + iy. The geometric meaning of the function φs,τ is explained inSection 2.2; see Figures 8 and 9 and Notation 2.7. Figure 2 gives a density plots ofan example of the Brown measure.
The formula for µs,τ is more transparent if we write it in logarithmic coordinates,ρ = log r = log |λ| and θ = arg λ. We note that
1
r2dx dy =
1
rdr dθ = dρ dθ,
so that
dµs,τ =1
2πτ1
dφs,τ (δ)
dδdρ dθ.
We then note from (1.7) that the coordinate δ is unchanged if we add τ1 to ρ andτ2 to θ. Thus, the density of µs,τ in logarithmic coordinates is constant in the τ -direction, where we think of the complex number τ as a vector in C ∼= R2. See theright-hand side of Figure 2.
![Page 7: arXiv:2104.07859v1 [math.PR] 16 Apr 2021](https://reader034.fdocument.org/reader034/viewer/2022042718/62676707814e77464c2343d3/html5/thumbnails/7.jpg)
BROWN MEASURE OF BROWNIAN MOTIONS 7
Figure 3. The Brown measure µs,τ with τ = 1 + i/2 and the lawof u putting equal mass at the four points ±1 and ±i. Shown fors = 0.9, s = 1, and s = 1.1
See also Figure 3 for additional examples of Brown measures, showing how theBrown measure changes as s changes with τ fixed.
1.4. Relating different values of τ . Our second main result is that all the Brownmeasures of ubs,τ with s and u fixed and τ varying, are related.
Theorem 1.1. Fix a positive real number s and the unitary element u and considera nonzero complex number τ satisfying |s− τ | ≤ s. Then there is an invertible mapΦs,τ : Σs → Σs,τ with the following properties. First, Φs,τ maps each radial segmentin Σs to a curve with a constant value of the coordinate δ in Σs,τ ; this curve is aportion of an exponential spiral. Second, the associated Brown measures µs,s andµs,τ are related by push-forward:
(Φs,τ )∗(µs,s) = µs,τ .
Furthermore, let Φs denote the limit of Φs,τ as τ tends to zero. Then Φs mapsΣs into the unit circle and the pushforward of µs,s by Φs is the law of uus, whereus is the free unitary Brownian motion and u is as in (1.2).
See Section 8 for details. The map Φs,τ is illustrated in Figure 4. Figure 5 thenshows the domains and Brown measures for a fixed value of s and several differentvalues of τ. Although the different Brown measures in the figure look quite differentfrom one another, they are actually all connected by maps of the form Φs,τ ◦Φ−1
s,τ ′ .In particular, the topology of the closed support of µs,τ is independent of τ with sfixed.
Theorem 1.1 demonstrates what we call a “model variation phenomenon.” Aswe noted in Section 1.1, we believe that the Brown measure µs,τ is the limitingeigenvalue distribution of the random matrix model UNBNs,τ . Assuming this is thecase, Theorem 1.1 tells us that the limiting eigenvalue distribution of one randommatrix model UNBNs,τ can be converted into the limiting eigenvalue distribution
of another random matrix model UNBNs,τ ′ by applying the map Φs,τ ◦ Φ−1s,τ ′ to
the eigenvalues of the first model. As we will explain in the next paragraph, thelimiting case of this result as τ → 0 was established in [13] and [23]. Otherwise, itseems to be a new phenomenon in random matrix theory. (After the first version ofthis paper was posted on the arXiv, Zhong posted a preprint [37] obtaining similarresults in the additive case.)
![Page 8: arXiv:2104.07859v1 [math.PR] 16 Apr 2021](https://reader034.fdocument.org/reader034/viewer/2022042718/62676707814e77464c2343d3/html5/thumbnails/8.jpg)
8 BRIAN C. HALL AND CHING-WEI HO
-1.5 -1.0 -0.5 0.5 1.0 1.5
-1.5
-1.0
-0.5
0.5
1.0
1.5
-1.4 -0.9 -0.4 0.6 1.1 1.6
-1.4
-0.9
-0.4
0.6
1.1
1.6
Figure 4. The map Φs,τ maps radial segments in Σs (left) tospiral segments in Σs,τ (right). Shown for s = 1 and τ = 1 + i/2,with the law of u giving equal mass to the four points ±1 and ±i
The paper [13] showed that the pushforward of the Brown measure of bs,s undera certain map Φs is equal to the law of the free unitary Brownian motion us. Thisresult was extended in [23] to relate the Brown measure of ubs to the law of uus,where u is an arbitrary unitary element freely independent of bs and of us. Themap Φs in [13, 23] is the same as the one in the last part of Theorem 1.1, showingthat the push-forward result in those papers is simply a limiting case (τ → 0) of amuch more general family of results.
1.5. The method of proof. The proofs use a variant of the PDE method intro-duced in [13], which studied the “standard” free multiplicative Brownian motionwith trivial initial condition. (See also [19] for a gentle introduction to the PDEmethod.) In the notation of the present paper, [13] corresponds to taking τ = s andu = 1. The method in [13] was then extended by the second author and Zhong [23]to analyze the standard free multiplicative Brownian motion with arbitrary unitaryinitial condition (τ = s and u is a arbitrary). The method has also been used in[10] and [20] and discussed in the physics literature in [16].
Although the results of the present paper include the results of [13] and [23]as special cases, the PDE we use here does not include the PDE in those papersas a special case. The PDE’s differ because in our PDE we vary τ with s fixed,whereas in [13, 23], τ is always equal to s. This point is discussed in detail in Section4.2. Although the approach we are using has substantial advantages (described inSection 4.2) relative to the approach in [13, 23], it also requires new techniques.Specifically, the technical details associated to analyzing the Brown measure in theregion where it is not zero are substantially different here than in previous papers.See the beginning of Section 7 for a discussion of the relevant differences. Toderive the relevant PDE, we use a factorization result (Theorem 4.3) for elementsof the form bs,τ in (1.1) that is of independent interest. The proof of this result issurprisingly subtle; see Appendix A.
1.6. Table of notation. We collect the following notations.
![Page 9: arXiv:2104.07859v1 [math.PR] 16 Apr 2021](https://reader034.fdocument.org/reader034/viewer/2022042718/62676707814e77464c2343d3/html5/thumbnails/9.jpg)
BROWN MEASURE OF BROWNIAN MOTIONS 9
Figure 5. The domains Σs,τ and associated Brown measures fors = 1 and several different values of τ , with the law of u giving equalmass to the four points ±1 and ±i. The real part of τ increasesfrom left to right and the imaginary part of τ is zero on the bottomrow and increases from bottom to top. The case τ = s is in themiddle of the bottom row
Table of Notationus free unitary Brownian motion starting at 1bs,τ free multiplicative Brownian motion in Notation 2.1u unitary element freely independent of bs,τµ0 law of uµs law of uusµs,τ Brown measure of ubs,τfβ holomorphic function in Definition 2.2
Σs and Σs,τ domains in Definitions 2.3 and 2.5S(s, τ, λ, ε) regularized log potential of ubs,τ in (4.1)S0(s, τ, λ) limiting value of S(s, τ, λ, ε) as ε tends to zero from abovev and δ twisted logarithmic coordinates defined in (1.7)τ1 and τ2 real and imaginary parts of τ
![Page 10: arXiv:2104.07859v1 [math.PR] 16 Apr 2021](https://reader034.fdocument.org/reader034/viewer/2022042718/62676707814e77464c2343d3/html5/thumbnails/10.jpg)
10 BRIAN C. HALL AND CHING-WEI HO
2. Set-up and statement of results
2.1. The free Brownian motions. We now consider a tracial von Neumann al-gebra A. To avoid a conflict of notation with the complex parameter τ, we denotethe trace on A by
tr : A → C,while emphasizing that tr [·] is not the trace in the sense of trace-class operators.Rather, tr [·] is a linear functional that behaves like the normalized trace of matrices.
In free probability, a semicircular element is the large-N limit of a GUE. Moreprecisely, an element X of a tracial von Neumann algebra (A, tr) is semicircularwith variance t if its law is the semicircular measure supported on the interval[−2√t, 2√t]. There then exists a semicircular Brownian motion xt, character-
ized as a continuous process with x0 = 1 and having freely independent incrementssuch that xt− xs is semicircular with variance t− s for all t > s. See Section 1.1 of[3].
We then define a rotated elliptic element to be one of the form
Z = eiθ(aX + ibY ), (2.1)
where X and Y are freely independent semicircular elements, a, b, and θ are realnumbers, and we assume a and b are not both zero. The ∗-distribution of Z isunchanged if we switch the sign of a or b. The ∗-distribution is also unchanged ifwe interchange a and b and then replace θ by θ + π. Finally, if a = b, then Z is acircular element with ∗-distribution independent of θ.
We parametrize rotated elliptic elements by two parameters: a positive varianceparameter s and a complex covariance parameter τ defined by
s = tr [Z∗Z] = s (2.2)
τ = tr [Z∗Z]− tr[Z2]. (2.3)
By the Cauchy–Schwarz inequality for the inner product 〈A,B〉 := tr(A∗B), anyrotated elliptic element must satisfy
|τ − s| ≤ s.We can recover the parameters a, b, and θ—up to the transformations in the pre-vious paragraph—by plugging (2.1) into (2.2) and (2.3), giving
tr [Z∗Z] = a2 + b2 = s
tr[Z2]
= e2iθ(a2 − b2) = s− τ
where we have used that tr[X2]
= tr[Y 2]
= 1 and tr [XY ] = tr [X] tr [Y ] = 0. Ifwe assume a ≥ b ≥ 0, then we easily find
θ =1
2arg(s− τ)
a =
√1
2(s+ |τ − s|)
b =
√1
2(s− |τ − s|). (2.4)
In the special case τ = s, we may take a = b =√s/2 and choose θ is arbitrarily.
If |τ − s| = s, we have a =√s and b = 0, so that Z = eiθ
√sX. In particular, if
τ = 0, then Z is just a semicircular element of variance s.
![Page 11: arXiv:2104.07859v1 [math.PR] 16 Apr 2021](https://reader034.fdocument.org/reader034/viewer/2022042718/62676707814e77464c2343d3/html5/thumbnails/11.jpg)
BROWN MEASURE OF BROWNIAN MOTIONS 11
We then define a free additive (s, τ)-Brownian motion as a continuous pro-cess ws,τ (r) with ws,τ (0) = 0 having freely independent increments such that forall r2 > r1,
ws,τ (r2)− ws,τ (r1)√r2 − r1
(2.5)
is a rotated elliptic element with parameters s and τ. Explicitly, we can constructws,τ (r) as
ws,τ (r) = eiθ(aXr + ibYr)
where a and b are chosen as above and where Xr and Yr are freely independentsemicircular Brownian motions.
We then construct a free multiplicative (s, τ)-Brownian motion bs,τ (r) asthe solution to the free stochastic differential equation
dbs,τ (r) = bs,τ (r)
(i dws,τ (r)− 1
2(s− τ) dr
), (2.6)
with
bs,τ (0) = 1.
The dr term on the right-hand side of (2.6) is an “Ito term” equal to half thesquare of i dws,τ (r), computed using the Ito rules in Section 4.3. Existence anduniqueness of the solution to (2.6) follows from a standard Picard iteration argu-ment, as in Proposition A.1 of [7]. (The key making the Picard iteration workis the Burkholder–Davis–Gundy estimate for the norm of a free stochastic inte-gral, as in [5, Theorem 3.2.1] or [30, Theorem 3.1.12].) It follows from (2.5) thatws,τ (r) ∼= wrs,rτ (1), where ∼= indicates that the two elements have the same ∗-distribution. It is then not hard to see that
bs,τ (r) ∼= brs,rτ (1),
We will therefore usually assume that r = 1, without loss of generality.We also fix a unitary element u that is freely independent of bs,τ (r).
Notation 2.1. For s > 0 and |τ − s| ≤ s, we use bs,τ to denote the value of bs,τ (r)at r = 1:
bs,τ := bs,τ (1).
Then we define
µs,τ = Brown measure of ubs,τ .
When τ = 0, we may take θ = 0, a =√s, and b = 0 in (2.4) so that ws,τ (r) =√
sXr. In that case, the SDE (2.6) becomes
dbs,τ (r) = bs,τ (r)
(i√s dXr −
1
2s dr
),
and the solution is a free unitary Brownian motion, with time-parameter scaled bys. We express this result as
bs,τ (r)|τ=0∼= usr, (2.7)
where us is a free unitary Brownian motion with initial condition 1, as introducedby Biane in [3].
![Page 12: arXiv:2104.07859v1 [math.PR] 16 Apr 2021](https://reader034.fdocument.org/reader034/viewer/2022042718/62676707814e77464c2343d3/html5/thumbnails/12.jpg)
12 BRIAN C. HALL AND CHING-WEI HO
2.2. Main results. Throughout the paper, we will assume that τ is a nonzerocomplex number satisfying |τ − s| ≤ s . We always write τ in the form
τ = τ1 + iτ2, τ1, τ2 ∈ R.We also assume that the unitary element u is fixed and we define a probabilitymeasure µ0 on the unit circle by
µ0 = law of u. (2.8)
That is to say, µ0 is the unique probability measure on S1 such that∫S1
ξk dµ0(ξ) = tr[uk]
for every integer k. Although most of the objects defined below depend on themeasure µ0, we do not indicated this dependence in the notation. We also considerthe free unitary Brownian motion us introduced in [3] and let
µs = law of uus.
The measure µs was computed by Zhong in [36]. In particular, Proposition 3.6 ofZhong states that µs is absolutely continuous with respect to the Lebesgue measureon the circle.
Definition 2.2. For any complex number β, we define a function fβ by
fβ(z) = z exp
{β
2
∫S1
ξ + z
ξ − zdµ0(ξ)
}for any z for which the integral is absolutely convergent.
In the case that µ0 is the δ-measure at 1 and β = s > 0, the function fs reducesto the one defined by Biane in [4] and used in [13] to compute the Brown measureof bs,s. The general definition of fs was given by Zhong in [36] and was used in [23]to compute the Brown measure of ubs,s. In general, the function fβ is certainlydefined and holomorphic on the open set C\ supp(µ0), where supp(µ0) is the closedsupport (in S1) of the measure µ0. In this paper, the motivation for Definition 2.2is that the characteristic curves of a certain family of PDE’s will be expressed interms of functions of the form fβ ; see Remark 2.6.
It is easily verified that for any positive real number s, the function fs satisfies
fs(z) =(f(1/z)
)−1
. (2.9)
By Proposition 2.3 of [36] (drawing on results of [2]), fs has a right inverse functionχs defined on the unit disk. We may then extend χs holomorphically to the set ofz such that |z| 6= 1 by defining
χs(z) =(χs (1/z)
)−1
, (2.10)
for |z| > 1. By (2.9), this extended χs is still a right inverse to fs. Then by [36,Theorem 3.8], χs extends by continuity to a neighborhood of any point ξ in theunit circle outside the closed support of the measure µs. Then χs is holomorphicon C \ supp(µs) by the Schwarz reflection principle and satisfies
fs(χs(z)) = z, z ∈ C \ supp(µs).
We then define a domain Σs as the interior of the complement of the image ofχs, as follows.
![Page 13: arXiv:2104.07859v1 [math.PR] 16 Apr 2021](https://reader034.fdocument.org/reader034/viewer/2022042718/62676707814e77464c2343d3/html5/thumbnails/13.jpg)
BROWN MEASURE OF BROWNIAN MOTIONS 13
supp(μs)
Σs
χs
Figure 6. The map χs = f−1s maps the complement of the sup-
port of µs (left) to the complement of the closure of Σs (right).Shown for s = 2 and µ0 = δ1
Definition 2.3. For any s > 0, we define sets Σs and Σs by
Σs = [χs(C \ supp(µs))]c
Σs = interior of Σs.
Since Proposition 2.4 will show that Σs is the closure of Σs, we will subsequentlyuse the notation Σs in place of Σs. See Figure 6.
In Section 3.1, we will give the following characterization of the domain Σs.
Proposition 2.4. There is a unique continuous function rs on the unit circlesatisfying 0 < rs(θ) ≤ 1 such that∣∣fs(rs(θ)eiθ)∣∣ = 1
and such that the domains Σs and Σs may be computed as
Σs = {reiθ∣∣ rs(θ) < r < 1/rs(θ)}.
Furthermore, we have
Σs = Σs.
We also have that
fs(rs(θ)eiθ) = fs(rs(θ)
−1eiθ).
We now introduce a domain Σs,τ , which we define by specifying its complement.
Definition 2.5. Fix a positive real number s and a nonzero complex number τ with|s− τ | ≤ s. Let Σs,τ be the domain defined by
(Σs,τ )c = fs−τ (Σcs) = fs−τ (χs(C\ supp(µs))) (2.11)
Σs,τ = interior of Σs,τ . (2.12)
We will see in Section 3 that Σs,τ is the closure of Σs,τ , so we will subsequently
use the notation Σs,τ in place of Σs,τ . See Figure 7. In the case that τ is real andu = 1, the domain Σs,τ and the map fs−τ ◦χs were studied in the paper [22] of thesecond author.
![Page 14: arXiv:2104.07859v1 [math.PR] 16 Apr 2021](https://reader034.fdocument.org/reader034/viewer/2022042718/62676707814e77464c2343d3/html5/thumbnails/14.jpg)
14 BRIAN C. HALL AND CHING-WEI HO
Σs Σs,τ
fs -τ
Figure 7. The map fs−τ maps the complement of the closure ofΣs (left) to the complement of the closure of Σs,τ (right). Shownfor s = 2 and µ0 = δ1
Remark 2.6. The way (the complement of) the domain Σs,τ arises in this pa-per is the following. To compute the Brown measure µs,τ of ubs,τ , we considerthe regularized logarithmic potential S of ubs,τ (as in (1.5)). We will derive (Sec-tion 4) a partial differential equation for S and then analyze this equation by theHamilton–Jacobi method. In this method (Section 5), we compute S along certain“characteristic curves” λ(τ) and ε(τ), which depend on a choice of λ0 and ε0.
Since the definition of the Brown measure involves letting ε tend to zero, we willtry to choose λ0 and ε0 so that ε(τ) = 0. The condition ε(τ) = 0 can be achievedby taking ε0 = 0—but with the restriction that λ0 cannot be in the closed supportsupp(µs) of the measure µs in (2.8). (This restriction arises because the initialmomenta in the problem become undefined if λ0 ∈ supp(µs).) In Section 6, we willsee that the Brown measure µs,τ is zero in a neighborhood of any point of the formλ(τ) computed with ε0 = 0 and λ0 ∈ C \ supp(µs).
Now, if we compute λ(τ) with ε0 = 0 and λ0 outside supp(µs), we will find(Proposition 5.6) that
λ(τ) = fs−τ (χs(λ0)).
Thus, by (2.11), we find that Σs,τ is the interior of the complement of the set ofpoints of the form λ(τ) = fs−τ (χs(λ0)). Since the Brown measure is zero neareach point of the form λ(τ), we see that the closed support of µs,τ is contained in
Σs,τ = Σs,τ .
We now introduce “twisted logarithmic coordinates” v and δ for a nonzero com-plex number λ, which are real numbers satisfying
λ = evτeiδ,
We can compute v and δ explicitly as
v =1
τ1log |λ| ; δ = arg λ− τ2
τ1log |λ| , (2.13)
where arg λ is the argument of λ and where τ = τ1 + iτ2. If we fix δ and let v vary,log λ varies along a straight line in the τ -direction in the plane, while λ itself variesalong an exponential spiral that intersects the unit circle at angle δ.
![Page 15: arXiv:2104.07859v1 [math.PR] 16 Apr 2021](https://reader034.fdocument.org/reader034/viewer/2022042718/62676707814e77464c2343d3/html5/thumbnails/15.jpg)
BROWN MEASURE OF BROWNIAN MOTIONS 15
fs
fsθ
ϕ
Figure 8. The dependence of φ on θ. Shown for s = 2 and µ0 = δ1
eiδ
fs -τ
fs -τθ
Figure 9. The dependence of δ on θ. Shown for s = 2, τ = 32 + 1
2 i,and µ0 = δ1
We will show that for each δ, if an exponential spiral {evτeiδ}v∈R intersects Σs,τ ,this spiral intersects the boundary of Σs,τ in exactly two points, corresponding tov = v1(δ) and v = v2(δ), with v1(δ) < v2(δ). For any two such boundary points,we will show that there is a unique pair rs(θ)e
iθ and rs(θ)−1eiθ of points on the
boundary of Σs such that
fs−τ (rs(θ)eiθ) = ev1(δ)τeiδ; fs−τ (rs(θ)
−1eiθ) = ev2(δ)τeiδ. (2.14)
Proposition 2.4 then tells us that fs maps the points rs(θ)eiθ and rs(θ)
−1eiθ to thesame point eiφ on the unit circle. Thus, to each such δ, we associate first an angleθ and then an angle φ. The relationship among φ, θ, and δ is shown in Figures 8and 9.
![Page 16: arXiv:2104.07859v1 [math.PR] 16 Apr 2021](https://reader034.fdocument.org/reader034/viewer/2022042718/62676707814e77464c2343d3/html5/thumbnails/16.jpg)
16 BRIAN C. HALL AND CHING-WEI HO
Notation 2.7. Fix a δ such that the exponential spiral evτeiδ intersects Σs,τ . Letθ be the angle such that (2.14) holds. Then define φs,τ (δ) by
φs,τ (δ) = arg fs(rs(θ)eiθ)
= arg fs(rs(θ)−1eiθ).
We are now ready to state our main result.
Theorem 2.8. All the mass of the Brown measure µs,τ is concentrated on the openset Σs,τ . The measure µs,τ has a density on Σs,τ given by
dµs,τ (λ) =1
2πτ1
1
|λ|2dφs,τ (δ)
dδdx dy, (2.15)
where λ = x + iy. In logarithmic coordinates ρ = log |λ| and θ = arg λ, (2.15)becomes
dµs,τ (λ) =1
2πτ1
dφs,τ (δ)
dδdρ dθ,
so that the density in logarithmic coordinates is constant in the τ -direction.
Here, when we say “constant in the τ -direction,” we are thinking of the complexnumber τ as a vector in C ∼= R2. See the right-hand side of Figure 2.
Let us consider what happens to (2.15) in the case τ = s. In that case, fs−τ (z) =f0(z) = z, so that Σs,τ = Σs and in Figure 9, δ is equal to θ. Thus, writing θ inplace of δ and s in place of τ, we have
dµs,s(λ) =1
2πs
1
|λ|2dφs,s(θ)
dθdx dy.
This formula agrees with the result previously obtained in Theorem 2.2 and Propo-sition 8.5 of [13] (in the case µ0 = δ1) and Proposition 4.24 and Theorem 4.28 of[23] (in general).
3. The domains Σs and Σs,τ
3.1. The domain Σs. In this section, we study the domain Σs in Definition 2.3.As in [13, Equation (4.1)] and [23, Equation (4.32)], we define a function T :
C→ R by
T (λ) =log(|λ|2)
|λ|2 − 1
(∫S1
1
|λ− ξ|2dµ0(ξ)
)−1
, (3.1)
where we give T the value 0 if the integral in the definition has the value +∞. Thefunction T is positive for λ outside the closed support of the measure µ0. If |λ| = 1,
we interpret log(|λ|2)/(|λ|2 − 1) as having the value 1 in accordance with the limitlimx→1 log(x)/(x−1) = 1. The motivation for this definition is this: If |z| 6= 1, thenfor any real number s, we can easily compute that
|fs(z)| = 1⇐⇒ T (z) = s. (3.2)
(In [13, 23], the function T also gives the small-ε0 lifetime to a solution of a certainsystem of ODE’s.) By [23, Lemma 4.15], T satisfies T (reiθ) = T (r−1eiθ) andT (reiθ) is a decreasing function of r for 0 < r < 1 with θ fixed.
As in [23, Equation (2.16)], we then define a function rs by
rs(θ) =
{the unique r < 1 such that T (reiθ) = s if such an r exists
1 if no such r exists.
![Page 17: arXiv:2104.07859v1 [math.PR] 16 Apr 2021](https://reader034.fdocument.org/reader034/viewer/2022042718/62676707814e77464c2343d3/html5/thumbnails/17.jpg)
BROWN MEASURE OF BROWNIAN MOTIONS 17
In light of (3.2), we may equivalently say that rs(θ) is the unique r < 1 for which∣∣fs(reiθ)∣∣ = 1, or 1 if no such r exists. Since |fs(z)| = 1 when |z| = 1, we see that∣∣fs(rseiθ)∣∣ = 1 (3.3)
for all θ, whether rs(θ) < 1 or rs(θ) = 1. The function rs is continuous everywhereand analytic when rs(θ) < 1 [23, Remark 2.8]. As a consequence of (2.9) and (3.3),we also have the relation
fs(rs(θ)eiθ) = fs(rs(θ)
−1eiθ). (3.4)
The following result is a strengthening of Proposition 2.4.
Proposition 3.1. The domain Σs in Definition 2.3 can be computed as
Σs =
{reiθ
∣∣∣∣rs(θ) < r <1
rs(θ)
}(3.5)
and also as
Σs = {z ∈ C|T (z) < s} . (3.6)
Finally, if z is outside of Σs then T (z) > s and z is outside the closed support ofµ0.
Proof. The set C \ supp(µs) consists of three parts: the set {|z| < 1} , the set{|z| > 1} , and S1 \ supp(µs). According to [36, Theorem 3.2], we have
χs({|z| < 1}) = {reiθ∣∣ r < rs(θ)}.
Then by (2.10),
χs({|z| > 1}) ={reiθ
∣∣ r > rs(θ)−1}.
Then by Proposition 3.7 and Theorem 3.8 of [36], the image of S1 \ supp(µs) isthe set of points eiθ in the unit circle for which rs ≡ 1 near θ. Thus, in light ofDefinition 2.3, Σs is the complement of the union of these three images. It is easyto see that Σs is the closure of the set on the right-hand side of (3.5). Then Σs,
defined as the interior of Σs, is simply the set on the right-hand side of (3.5), so
that Σs = Σs. Theorem 4.10 of [23] then gives the alternative characterization ofΣs in (3.6) and shows that T > s outside the closure of Σs. That points outside theclosure of Σs are outside the closed support of µ0 follows by the same argument asin the proof of Lemma 6.3 of [20]. �
We will use the following notation.
Definition 3.2. We define a continuous function φs from S1 to S1 by the relation
eiφs(θ) = fs(rs(θ)e
iθ) = fs(rs(θ)−1eiθ).
Here we have used the identity (3.4). The notation is illustrated in Figure 8.According to [36, Proposition 3.7], the map φs defines a homeomorphism of theunit circle to itself.
![Page 18: arXiv:2104.07859v1 [math.PR] 16 Apr 2021](https://reader034.fdocument.org/reader034/viewer/2022042718/62676707814e77464c2343d3/html5/thumbnails/18.jpg)
18 BRIAN C. HALL AND CHING-WEI HO
3.2. The domain Σs,τ . We study the domain Σs,τ in Definition 2.5. We willuse the twisted logarithmic coordinates introduced in (1.7). Recall that the (v, δ)-coordinates of a nonzero complex number z may be obtained by writing z as
z = evτeiδ,
with v and δ in R.We let J denote the Herglotz integral of µ0, given by
J(z) =
∫S1
ξ + z
ξ − zdµ0(ξ), (3.7)
which appears in Definition 2.2 defining the function fβ . Using the Cauchy–Schwarzinequality, we compute that
|J(z)| =∣∣∣∣1 + 2z
∫1
ξ − zdµ0(ξ)
∣∣∣∣≤ 1 + 2 |z|
(∫S1
1
|ξ − z|2dµ0(ξ)
)1/2
.
Thus, J(z) is defined and finite whenever the integral in the definition (3.1) of thefunction T is finite.
If there is some s > 0 for which z is outside Σs, then by (3.6), T (z) 6= 0 andJ(z) will be defined and finite. Furthermore,
|J(z1)− J(z2)| = 2 |z1 − z2|∣∣∣∣∫S1
ξ
(ξ − z1)(ξ − z2)dµ0(ξ)
∣∣∣∣≤ 2 |z1 − z2|
(∫S1
1
|ξ − z1|2dµ0(ξ)
∫S1
1
|ξ − z2|2dµ0(ξ)
)1/2
.
(3.8)
From this and (3.6), we can easily verify that J is continuous on the complementof Σs, for every s > 0.
We will prove the following results. One of the results concerns the δ-coordinateof fs−τ (rs(θ)e
iθ); the other gives a characterization of Σs,τ .
Theorem 3.3. Fix a positive real number s and a nonzero complex number τsatisfying |τ − s| ≤ s.
(1) Define a function δs,τ : R→ R by
δs,τ (θ) = θ +s− |τ |2 /τ1
2Im
[∫S1
(ξ + rs(θ)e
iθ
ξ − rs(θ)eiθ
)dµ0(ξ)
]. (3.9)
Then δs,τ is continuous and strictly increasing and satisfies
δs,τ (θ + 2π) = δs,τ (θ) + 2π.
Furthermore, the δ-coordinate of fs−τ (rs(θ)eiθ) may be computed as
δ(fs−τ (rs(θ)eiθ)) = δs,τ (θ).
(2) For each δ ∈ R, choose θ ∈ R so that δs,τ (θ) = δ, which is possible by Point1. Then define vs,τ1 (δ) and vs,τ2 (δ) to be the v-coordinates of fs−τ (rs(θ)e
iθ)and fs−τ (rs(θ)
−1eiθ), respectively, so that
fs−τ (rs(θ)eiθ) = eτv
s,τ1 (δ)eiδ; fs−τ (rs(θ)
−1eiθ) = eτvs,τ2 (δ)eiδ. (3.10)
![Page 19: arXiv:2104.07859v1 [math.PR] 16 Apr 2021](https://reader034.fdocument.org/reader034/viewer/2022042718/62676707814e77464c2343d3/html5/thumbnails/19.jpg)
BROWN MEASURE OF BROWNIAN MOTIONS 19
-1 1 2 3 4 5
-3
-2
-1
1
2
3
Σs-2 -1 1 2 3 4
-3
-2
-1
1
2
3
Σs,τ
Figure 10. The domains Σs (left) and Σs,τ (right). The com-plement of each domain in the Riemann sphere consists of twotopological disks (dark and light gray), which may overlap on theboundary. The map fs−τ takes each disk on the left homeomor-phically to the corresponding disk on the right. Shown for µ0 = δ1,s = 2, and τ = 3
2 + 12 i
Then vs,τ1 (δ) ≤ vs,τ2 (δ) for all δ and the domain Σs,τ may be computed as
{evτeiδ∣∣ vs,τ1 (δ) < v < vs,τ2 (δ)} (3.11)
and Σs,τ = Σs,τ .
Note that if vs,τ1 (δ) = vs,τ2 (δ), then there are no points Σs,τ of the form evτeiδ.Point 1 of the theorem is proved in Section 3.3. Section 3.4 then shows that fs−τ
is injective on the complement of Σs. The characterization of the domain in (3.11) isthen given in Section 3.5. We briefly outline the argument for this characterization.The complement of Σs in the Riemann sphere can be computed as the union oftwo closed topological disks, {reiθ| r ≤ rs(θ)} and {reiθ| r ≥ rs(θ)−1}∪{∞}, whichintersect at the points (if any) where rs(θ) = 1. These two disks are shown in darkgray and light gray, respectively, on the left-hand side of Figure 10. We will showthat fs−τ maps these disks to two closed topological disks, namely
{eτveiδ|v ≤ vs,τ1 (δ)} ∪ {0} (3.12)
and
{eτveiδ|v ≥ vs,τ2 (δ)} ∪ {∞}. (3.13)
These disks are shown in dark gray and light gray, respectively, on the right-handside of Figure 10. Since the disks (3.12) and (3.13) cover v ≤ vs,τ1 (δ) and v ≥ vs,τ2 (δ),the complement of their union is the set in (3.11) where vs,τ1 (δ) < v < vs,τ2 (δ). Once
this result is established, we can easily compute Σs,τ := [fs−τ ((Σs)c)]c and verify
that Σs,τ := int(Σs) is the set in (3.11).
3.3. Behavior of fs−τ on the boundary of Σs. Throughout the section, weassume that s is a positive real number and τ is a nonzero complex number satisfying
![Page 20: arXiv:2104.07859v1 [math.PR] 16 Apr 2021](https://reader034.fdocument.org/reader034/viewer/2022042718/62676707814e77464c2343d3/html5/thumbnails/20.jpg)
20 BRIAN C. HALL AND CHING-WEI HO
|τ − s| ≤ s. As usual, we let τ1 and τ2 denote the real and imaginary parts of τ,respectively.
3.3.1. Proof of Point 1 of Theorem 3.3. We now work our way toward the proof ofthe first part of Theorem 3.3. We define Rs(θ) and Is(θ) as the real and imaginaryparts of the Herglotz function J in (3.7), on the curve rs(θ)e
iθ:
Rs(θ) = Re[J(rs(θ)eiθ)]; Is(θ) = Im[J(rs(θ)e
iθ)]. (3.14)
Lemma 3.4. The δ-coordinate of the point fs−τ (rs(θ)eiθ) may be computed as in
(3.9) and we have the inequality
0 <|τ |2
sτ1≤ 2. (3.15)
Proof. We may easily compute that fs−τ (z) = fs(z)e− τ2 J(z). Since
∣∣fs(rs(θ)eiθ)∣∣equals 1, we must have
fs(rs(θ)eiθ) = ei(θ+
s2 Is(θ)). (3.16)
Thus,
fs−τ (rs(θ)eiθ) = exp
{iθ + i
s
2Is(θ)
}exp
{−τ
2Rs(θ)
}exp
{− iτ
2Is(θ)
}.
Now, multiplying a complex number z by eiα, α ∈ R, just adds α to the δ-coordinateof z, while multiplying z by evτ , v ∈ R, does not change the δ-coordinate of z. Thus,
δ(fs−τ (rs(θ)e
iθ))
= θ +s
2Is(θ) + δ
(exp
{− iτ
2Is(θ)
})= θ +
s
2Is(θ)−
|τ |2
2τ1Is(θ),
where the second equality is a direct computation using the definition (1.7) of δ.This expression is the claimed result (3.9).
Since τ is nonzero and satisfies |τ − s| ≤ s, both |τ |2 and τ1 are positive, so that
0 < |τ |2 /τ1. The inequality |τ |2 /(2τ1) ≤ s follows from the assumption |τ − s|2 ≤s2, after writing |τ − s|2 as |τ |2 − 2sτ1 + s2. �
Next, we estimate the derivative of δs,τ (θ) at points θ where rs(θ) < 1.
Proposition 3.5. The function δs,τ in (3.9) is differentiable at every point θ forwhich rs(θ) < 1, and at every such point, we have
0 <dδs,τ
dθ< 2.
Proof. If Is is as in (3.14), then (3.9) says that
δs,τ (θ) = θ +s− |τ |2 /τ1
2Is(θ). (3.17)
Meanwhile, the relation (3.16) shows that the function φs in (3.2) can be computedas
φs(θ) = θ +s
2Is(θ). (3.18)
If we solve for Is in (3.18), substitute into (3.17), and differentiate, we get
dδs,τ (θ)
dθ=|τ |2
sτ1+
(1− |τ |
2
sτ1
)dφs
dθ.
![Page 21: arXiv:2104.07859v1 [math.PR] 16 Apr 2021](https://reader034.fdocument.org/reader034/viewer/2022042718/62676707814e77464c2343d3/html5/thumbnails/21.jpg)
BROWN MEASURE OF BROWNIAN MOTIONS 21
Now, [23, Lemma 4.20] shows that for every θ with rs(θ) < 1, the function φs
is differentiable at θ with the estimate 0 < dφs/dθ < 2. Then if |τ |2 /(sτ1) < 1, weget
|τ |2
sτ1<dδs,τ
dθ< 2− |τ |
2
sτ1,
and if |τ |2 /(sτ1) > 1, we get
2− |τ |2
sτ1<dδs,τ
dθ<|τ |2
sτ1,
while if |τ |2 /(sτ1) = 1, we get
dδs,τ (θ)
dθ=|τ |2
sτ1= 1.
In all cases, the inequality (3.15) shows that the lower bound on dδs,τ/dθ is greaterthan or equal to zero and the upper bound is less than or equal to 2. �
Proposition 3.6. The function δs,τ is strictly increasing on {θ ∈ R|rs(θ) = 1}.That is, if θ2 > θ1 and rs(θ1) = rs(θ2) = 1, then δs,τ (θ2) > δs,τ (θ1).
Proof. Denote |τ |2 /τ1 by t and let θ2 > θ1. Note that (ξ+ eiθj )/(ξ− eiθj ), j = 1, 2,are purely imaginary. If rs(θj) = 1, we compute that
δs,τ (θ2)− δs,τ (θ1)
=
(θ2 −
s− t2
Is(θ)
)−(θ1 −
s− t2
Is(θ)
)=(θ2 − θ1)
(1− (s− t)e
iθ2 − eiθ1θ2 − θ1
∫ξ dµ0(ξ)
(ξ − eiθ2)(ξ − eiθ1)
). (3.19)
Since θ1 6= θ2, we have ∣∣∣∣eiθ2 − eiθ1θ2 − θ1
∣∣∣∣ =
∣∣∣∣ sin[(θ2 − θ1)/2]
(θ2 − θ1)/2
∣∣∣∣ < 1. (3.20)
Now, since rs(θj) = 1, j = 1, 2, Proposition 2.4 tells us that the point eiθj is notin Σs. Thus, by Proposition 3.1, T (eiθj ) ≥ s, or∫
1
|ξ − eiθj |2dµ(ξ) ≤ 1
s
log rs(θj)2
rs(θj)2 − 1=
1
s.
We thus obtain, using the Cauchy–Schwarz inequality, that∣∣∣∣∫ ξ dµ0(ξ)
(ξ − eiθ2)(ξ − eiθ1)
∣∣∣∣ ≤ 1
s. (3.21)
By (3.15), we have 0 < t ≤ 2s or −s < t − s < s. It then follows from (3.20) and(3.21) that ∣∣∣∣(s− t)eiθ2 − eiθ1θ2 − θ1
∫ξ dµ0(ξ)
(ξ − eiθ2)(ξ − eiθ1)
∣∣∣∣ < 1.
Plugging this estimate into (3.19) shows that δs,τ (θ2)− δs,τ (θ1) > 0. �
![Page 22: arXiv:2104.07859v1 [math.PR] 16 Apr 2021](https://reader034.fdocument.org/reader034/viewer/2022042718/62676707814e77464c2343d3/html5/thumbnails/22.jpg)
22 BRIAN C. HALL AND CHING-WEI HO
Proof of Point 1 of Theorem 3.3. We have already shown (Lemma 3.4) that δs,τ isa local continuous version of the δ-coordinate of fs−τ (rs(θ)e
iθ) for θ in a neighbor-hood of θ0. By (3.8), fs−τ is continuous on Σcs, so δs,τ is continuous.
Next, we show that δs,τ is strictly increasing on R. Let θ1 < θ2. We consider fourcases, corresponding to whether rs(θ1) and rs(θ2) are 1 or less than 1. If both rs(θ1)and rs(θ2) are both 1, Proposition 3.6 shows that δs,τ (θ1) < δs,τ (θ2). If rs(θ1) = 1but rs(θ2) < 1, then let α be the infimum of the interval I around θ2 on which rs ispositive, so that rs(α) = 1 and θ1 ≤ α. Then δs,τ (θ1) ≤ δs,τ (α) by Proposition 3.6and δs,τ (α) < δs,τ (θ2) by the positivity of dδ/dθ on I in Proposition 3.5. Theremaining cases are similar; the case where both rs(θ1) and rs(θ2) are less than 1can be subdivided into two cases depending on whether or not θ1 and θ2 are in thesame interval where rs is less than 1.
Meanwhile, from (3.9), we can see that δs,τ (θ)− θ is 2π-periodic and continuouson R. Since also δs,τ is strictly increasing, it defines a homeomorphism of S1 toS1. �
3.3.2. The functions v1 and v2. In the following lemma, we show that the functionfs−τ maps the points rs(θ)e
iθ and rs(θ)−1eiθ to a pair of points lying on the same
exponential spiral; the point at which this spiral crosses the unit circle is eiδs,τ (θ).
Recall the definition of the functions vs,τ1 and vs,τ2 in (3.10).
Lemma 3.7. The points fs−τ (rs(θ)eiθ) and fs−τ (rs(θ)
−1eiθ) have the same δ-coordinate, which we denote as δs,τ (θ). Furthermore, we have that vs,τ1 (δs,τ (θ)) <vs,τ2 (δs,τ (θ)) if and only if rs(θ) < 1. In fact,
vs,τ2 (δs,τ (θ))− vs,τ1 (δs,τ (θ)) = −2
slog rs(θ). (3.22)
Proof. The Herglotz integral J(z) in (3.7) is easily seen to satisfy
J(1/z) = −J(z), (3.23)
so that
fs−τ (z) = fs(z)e− τ2 J(z)
fs−τ (1/z) = fs(1/z)e− τ2 J(1/z) =
(fs(z)
)−1
eτ2 J(z).
If we evaluate at z = rs(θ)eiθ where |fs(z)| = 1 and use the notation Rs(θ) and
Is(θ) defined in (3.14), we obtain
fs−τ (rs(θ)eiθ) = fs(rs(θ)e
iθ) exp{−τ
2Rs(θ)
}exp
{−i τ
2Is(θ)
}fs−τ (rs(θ)
−1eiθ) = fs(rs(θ)eiθ) exp
{τ2Rs(θ)
}exp
{−i τ
2Is(θ)
}.
Since multiplying a complex number by evτ for v ∈ R does not change the δ-coordinate, fs−τ (rs(θ)e
iθ) and fs−τ (rs(θ)−1eiθ) have the same δ-coordinates.
Meanwhile, recalling that the v-coordinate of a point λ is computed as log |λ| /τ1,we find that the difference of the v-coordinates is Rs(θ). But using the identity∣∣fs(rs(θ)eiθ∣∣ = 1, we may compute that
Rs(θ) = −2
slog rs(θ),
giving the claimed formula (3.22). �
![Page 23: arXiv:2104.07859v1 [math.PR] 16 Apr 2021](https://reader034.fdocument.org/reader034/viewer/2022042718/62676707814e77464c2343d3/html5/thumbnails/23.jpg)
BROWN MEASURE OF BROWNIAN MOTIONS 23
3.4. Injectivity of fs−τ on the complement of Σs. In this section, we provethe following result. We continue to assume s is a positive real number and τ is anonzero complex number with |τ − s| ≤ s.
Theorem 3.8. The map fs−τ is injective on the complement of Σs, including onthe boundary.
We begin with the following lemma, whose proof is deferred until the end of thissection.
Lemma 3.9. For all complex numbers w1 and w2, we have∣∣∣∣ew1 − ew2
w1 − w2
∣∣∣∣2 ≤ (e2 Rew1 − 1)(e2 Rew2 − 1)
(2 Rew1)(2 Rew2). (3.24)
Here all fractions are interpreted as having their limiting values when the denomi-nator is zero. Equality holds in (3.24) only if w2 = −w1.
Proof of Theorem 3.8. Suppose, towards a contradiction, that fs−τ (z1) = fs−τ (z2)for two distinct points z1 and z2 outside of Σs. Since fs−τ (z) = 0 if and only ifz = 0, we may assume z1 and z2 are nonzero. Using the definition of fs−τ and abit of algebraic manipulation, we obtain
z1
z2= exp
{(s− τ) (z2 − z1)
∫ξ
(ξ − z1)(ξ − z2)dµ0(ξ)
}.
We can then find some choice of a logarithm of z1 and a logarithm of z2 such thattaking the log of both sides gives
log z1 − log z2
z1 − z2= −(s− τ)
∫ξ
(ξ − z1)(ξ − z2)dµ0(ξ). (3.25)
Applying the Cauchy–Schwarz inequality, we find that, since ξ ∈ S1, we have∣∣∣∣∫ ξ
(ξ − z1)(ξ − z2)dµ0(ξ)
∣∣∣∣≤
(∫1
|ξ − z1|2dµ0(ξ)
∫1
|ξ − z1|2dµ0(ξ)
)1/2
. (3.26)
Now, since z1 and z2 are outside the domain Σs, Proposition 3.1 tells us thatT (zj) ≥ s, j = 1, 2, and T (zj) > s unless zj is in the boundary of Σs. Thus,∫
S1
1
|ξ − zj |2dµ0(ξ) ≤ 1
s
log(|zj |2)
|zj |2 − 1, (3.27)
and the inequality is strict unless zj is in the boundary of Σs.Assume at least one of z1 and z2 is not in the boundary of Σs and use (3.26)
and (3.27) to get∣∣∣∣∫ ξ
(ξ − z1)(ξ − z2)dµ0(ξ)
∣∣∣∣ < 2
s
(log |z1| log |z2|
(|z1|2 − 1)(|z2|2 − 1)
)1/2
. (3.28)
By taking the absolute value of (3.25) and using (3.28) and the assumption |τ − s| ≤s, we get ∣∣∣∣ log z1 − log z2
z1 − z2
∣∣∣∣ < 2
(log |z1| log |z2|
(|z1|2 − 1)(|z2|2 − 1)
)1/2
. (3.29)
![Page 24: arXiv:2104.07859v1 [math.PR] 16 Apr 2021](https://reader034.fdocument.org/reader034/viewer/2022042718/62676707814e77464c2343d3/html5/thumbnails/24.jpg)
24 BRIAN C. HALL AND CHING-WEI HO
We now let w1 = log z1 and w2 = log z2, square both sides of (3.29), and takereciprocals, giving ∣∣∣∣ew1 − ew2
w1 − w2
∣∣∣∣2 > (e2 Rew1 − 1)(e2 Rew2 − 1)
(2 Rew1)(2 Rew2). (3.30)
What we have shown is that if fs−τ (z1) = fs−τ (z2) for two distinct points z1
and z2 outside Σs with at least one of z1 and z2 not in ∂Σs, then there exist somechoices w1 and w2 of the logarithms of z1 and z2, respectively, for which (3.30)holds. But (3.30) contradicts Lemma 3.9.
It remains, then, to address the case in which both z1 and z2 are on the boundaryof Σs. By Proposition 3.1, any point z on the boundary of Σs must have the formz = rs(θ)e
iθ or rs(θ)−1eiθ. If z1 and z2 have the same value of θ, then they must
have the form z = rs(θ)eiθ and rs(θ)
−1eiθ with rs(θ) < 1, in which case Lemma 3.7tells us that the v-coordinates of fs−τ (z1) and fs−τ (z2) are different. If z1 and z2
have different values of θ, then Point 1 of Theorem 3.3 tells us that the δ-coordinatesof fs−τ (z1) and fs−τ (z2) are different. �
We note that if τ = 0, Lemma 3.7 does not make sense as written, becausethe coordinate v is defined as log |λ| /τ1. But if we rewrite the lemma using thecoordinate ρ = log |λ| , we find that ρs,τ2 (δs,τ (θ)) = ρs,τ1 (δs,τ (θ)) when τ = 0. Thus,when τ = 0, injectivity of fs−τ = fs fails on the boundary of Σs, as we have alreadyobserved in (3.4).
We conclude this section by supplying the proof of Lemma 3.9.
Proof. If we let a = (w1 + w2)/2 and b = (w1 − w2)/2, we can compute that∣∣∣∣ew1 − ew2
w1 − w2
∣∣∣∣2 = e2 Re(a)
∣∣∣∣ sinh(b)
b
∣∣∣∣2 . (3.31)
We now claim that ∣∣∣∣ sinh(b)
b
∣∣∣∣2 ≤ ( sinh(Re b)
Re b
)2
, (3.32)
with equality only if b is real. To verify (3.32), we first compute that with b = x+iy,we have
|sinh(b)|2 = sinh2(x) + sin2(y).
We then use the elementary inequalities
sinh2(x) ≥ x2; sin2(y) ≤ y2,
which hold with equality only at x = 0 and y = 0, respectively. These inequalitiesgive ∣∣∣∣ sinh(b)
b
∣∣∣∣2 ≤ sinh2(x) + y2
x2 + y2≤ sinh2(x)
x2, (3.33)
with equality only if x = 0 or y = 0. This result establishes the inequality (3.32). Ifequality holds in (3.32), the equality holds in (3.33), so that either y = 0—meaningthat b is real—or x = 0. But if x = 0, (3.32) says that |sin y/y| ≤ 1, and equalityholds there only if y = 0.
![Page 25: arXiv:2104.07859v1 [math.PR] 16 Apr 2021](https://reader034.fdocument.org/reader034/viewer/2022042718/62676707814e77464c2343d3/html5/thumbnails/25.jpg)
BROWN MEASURE OF BROWNIAN MOTIONS 25
Combining (3.31) and (3.32), we see that∣∣∣∣ew1 − ew2
w1 − w2
∣∣∣∣2 ≤ e2 Re a
(sinh(Re b)
Re b
)2
= eRew1+Rew2
(sinh((Rew1 − Rew2)/2)
(Rew1 − Rew2)/2
)2
, (3.34)
with equality only if Im b = 0, that is, if Imw1 = Imw2. Now, the functionlog(sinh(x)/x) is strictly convex on the real line, which we can prove by computingits second derivative as 1/x2 − 1/ sinh2 x, which is positive for all x. Thus,
sinh2(u+v
2
)(u+v
2
)2 ≤ sinhu
u
sinh v
v
with equality only when u = v. Applying this with u = Rew1 and v = −Rew2
gives (sinh((Rew1 − Rew2)/2)
(Rew1 − Rew2)/2
)2
≤ sinh(Rew1)
Rew1
sinh(Rew2)
Rew2, (3.35)
with equality only if Rew2 = −Rew1. Plugging (3.35) back into (3.34) and simpli-fying give the claimed formula. �
3.5. The characterization of Σs,τ . Finally, we are ready to prove Point 2 ofTheorem 3.3, using the strategy indicated in Figure 10. We use the followingelementary topological result.
Lemma 3.10. Suppose D1 and D2 are closed topological disks in C and f is aninjective, continuous map of D1 into C. Suppose f maps at least one point inthe interior of D1 into the interior of D2 and that f maps the boundary of D1
homeomorphically onto the boundary of D2. Then the image of D1 is contained inD2 and f is a homeomorphism of D1 onto D2.
Proof. Pick z1 in the interior of D1 mapping to the interior of D2. If some z2 inthe interior of D1 maps outside of D2, connect z1 to z2 by a continuous path inthe interior of D1. The image of this path then travels from the interior of D2 tothe complement of D2 and must cross ∂D2. Thus, there is some z3 in the interiorof D1 mapping to ∂D2. But f maps ∂D1 onto ∂D2, so there is z4 in ∂D1 withf(z4) = f(z3), contradicting the injectivity of f.
Meanwhile, f maps ∂D1 to a curve that winds exactly once around each pointin the interior of D2. It then follows easily that f must map D1 onto D2. �
Proof of Point 2 of Theorem 3.3. The claim that v1(δ) ≤ v2(δ) follows from Lemma3.7. To establish the characterization of Σs,τ , we apply the lemma with f = fs−τ ,with D1 = {reiθ
∣∣ 0 ≤ r < rs(θ)}, and with D2 = {eτveiδ| −∞ ≤ v ≤ vs,τ1 (δ)}. (Wedefine the v-coordinate of 0 to be −∞.) Theorem 3.8 tells us that fs−τ is injectiveon D1. Furthermore, fs−τ maps the point 0 in D1 to the point 0 in D2. Finally,Point 1 of Theorem 3.3, together with the definition (3.10), tells us that fs−τ maps∂D1 homeomorphically onto ∂D2. Thus, Lemma 3.10 tells us that fs−τ maps D1
into D2 and is a homeomorphism. A similar argument shows that fs−τ maps thedisk
{reiθ∣∣ r ≥ rs(θ)−1} ∪ {∞}
![Page 26: arXiv:2104.07859v1 [math.PR] 16 Apr 2021](https://reader034.fdocument.org/reader034/viewer/2022042718/62676707814e77464c2343d3/html5/thumbnails/26.jpg)
26 BRIAN C. HALL AND CHING-WEI HO
in the Riemann sphere onto the disk
{evτeiδ∣∣ v ≥ vs,τ2 (δ))} ∪ {∞}.
We therefore conclude that
fs−τ (Σcs) = {eτveiδ| −∞ ≤ v ≤ vs,τ1 (δ) or v ≥ vs,τ2 (δ)}.
Now, the boundary of Σs consists of points of the form rs(θ)eiθ and rs(θ)
−1eiθ wherers(θ) < 1, together with limits of such points. By (3.10) and Lemma 3.7, fs−τ willmap ∂Σs to points with v-coordinates vs,τ1 (δ) or vs,τ2 (δ) where vs,τ1 (δ) < vs,τ2 (δ),together with limits of such points. Then as in the proof of Proposition 3.1, we caneasily see that Σs is the closure of the set in (3.11), so that Σs is the set in (3.11)
and Σs = Σs. �
4. The PDE for S
4.1. The main result. Recall the definition of bs,τ in (1.1) and recall that u is aunitary element freely independent of bs,τ .
Definition 4.1. Define a function S by
S(s, τ, λ, ε) = tr[log((ubs,τ − λ)∗(ubs,τ − λ) + ε2)
](4.1)
for all s > 0, τ ∈ C with |τ − s| ≤ s, λ ∈ C, all ε > 0.
We call S the regularized log potential of ubs,τ . Note that we regularize thelogarithm on the right-hand side of (4.1) by ε2. By contrast, [13] and [23] use ε.
Theorem 4.2. The function S in Definition 4.1 satisfies the PDE
∂S
∂τ=
1
8
[1−
(1− ε∂S
∂ε− 2λ
∂S
∂λ
)2]. (4.2)
for all λ ∈ C, all ε > 0, and all τ > 0 satisfying |τ − s| < s, with the initialcondition at τ = 0 given by
S(s, 0, λ, ε) = tr[log((uus − λ)∗(uus − λ) + ε2)
],
where us is the free unitary Brownian motion. More explicitly, we have
S(s, 0, λ, ε) =
∫S1
log(|ξ − λ|2 + ε2) dµs(ξ), (4.3)
where µs is the law of the unitary element uus.
This result is proved in Section 4.5. Note that although in Definition 4.1 weallow |τ − s| ≤ s, Theorem 4.2 only asserts that the PDE (4.2) holds for τ in theopen set |τ − s| < s.
Note that S takes positive real values and therefore cannot be holomorphic in τor λ (unless it is independent of that variable). Thus, the derivative with respectto τ in (4.2) should be interpreted as the usual complex partial derivative
∂
∂τ=
1
2
(∂
∂τ1− i ∂
∂τ2
),
where τ = τ1 + iτ2, and similarly for ∂/∂λ.
![Page 27: arXiv:2104.07859v1 [math.PR] 16 Apr 2021](https://reader034.fdocument.org/reader034/viewer/2022042718/62676707814e77464c2343d3/html5/thumbnails/27.jpg)
BROWN MEASURE OF BROWNIAN MOTIONS 27
4.2. A discussion of our approach. Recall that the three-parameter free multi-plicative Brownian motion bs,τ is defined as the solution bs,τ (r) to a the free SDE(2.6) evaluated at r = 1 (Notation 2.1). The reader might then naturally expectthat we would analyze the Brown measure of ubs,τ by deriving a PDE for the reg-ularized logarithmic potential S of ubs,τ (r), with r playing the role of the timevariable. Indeed, this is the approach taken in [13] and [23] in the case τ = s. Al-though we will, in fact, derive such a PDE—see (4.4) below—it is not the PDE wewill actually use to compute the Brown measure. Instead, to compute the Brownmeasure, we will use the PDE (4.2) in Theorem 4.2, in which we differentiate theregularized log potential S of ubs,τ with respect to τ while keeping s fixed.
This approach can be motivated by the work of the first author with Driverand Kemp on the complex-time Segal–Bargmann transform [12]. In that paper,the space of L2 functions on U(N) with respect to a heat kernel measure ρs aretransformed unitarily into holomorphic L2 functions on GL(N ;C) with respect toa heat kernel measure νs,τ by means of the heat operator with complex time τ.The measure νs,τ is just the law of the finite-N Brownian motion BNs,τ (1) and theappearance of the heat operator with time τ makes it natural to differentiate in τwith s fixed.
Regardless of that motivation, there are several advantages to differentiatingwith respect to τ with s fixed. First, the PDE in (4.2) is simpler the one obtainedby differentiating in r, which reads
∂S
∂r=
[τ
4
(1−
(1− ε∂S
∂ε− 2λ
∂S
∂λ
)2)]
+ s
[λ2
(∂S
∂λ
)2
− λ∂S∂λ
+|λ|2
4
(∂S
∂ε
)2]. (4.4)
(Apply Theorem 4.4 below with (s, τ) replaced by (0, 0) and (s′, τ ′) replaced by(s, τ).) Although the first term on the right-hand side of (4.4) is closely related to(4.2), there is a complicated second term. Second, in the PDE (4.2), it is possible(at least formally) to set ε = 0 and obtain a self-contained PDE for
S0(s, τ, λ) := S(s, τ, λ, ε).
That is to say, if we set ε = 0 in (4.2), all derivatives with respect to ε alsodisappear, which is not the case for the second term in the PDE (4.4). Since we areultimately interested in setting ε = 0, this property of the PDE will prove useful.Third, related to the second, differentiating with respect to τ with s fixed will helpus understand a crucial property of the Brown measures µs,τ , namely that thereis close relationship between two Brown measures with the same value of s butdifferent values of τ. To understand this property from the PDE perspective, wefirst set ε = 0, after justifying that this is allowed. As we have noted, putting ε = 0gives a self-contained PDE for the un-regularized log potential S0 of ubs,τ . We willthen apply the Laplacian to both sides of this equation, obtaining a formula forhow the Brown measure µs,τ changes as τ changes with s fixed. See Section 8.
One disadvantage of differentiating in τ with s fixed is that the initial condition—computed from ubs,τ at τ = 0—is not “trivial.” Specifically, when τ = 0, we have
ubs,0 = uus,
![Page 28: arXiv:2104.07859v1 [math.PR] 16 Apr 2021](https://reader034.fdocument.org/reader034/viewer/2022042718/62676707814e77464c2343d3/html5/thumbnails/28.jpg)
28 BRIAN C. HALL AND CHING-WEI HO
where us is Biane’s free unitary Brownian motion and u is our unitary element,assumed to be freely independent of us. By contrast, if we differentiated bs,τ (r)with respect to r, then the initial condition would be computed from the value ofubs,τ (r) at r = 0, which is simply u. Fortunately, Zhong [36] has computed the lawof uus in terms of the law of u using Biane’s computation of the law of us and thetechnique of free multiplicative convolution. We will use Zhong’s results in Section5.4 (and then indirectly in Sections 6 and 7).
Although our PDE is in many ways simpler than the one in [13] and [23], theanalysis of it requires new techniques. Thus, the technical details involved in com-puting the Brown measure are completely different here as compared to those earlierpapers. See the beginning of Section 7 for more information.
4.3. Ito rules. The theory of stochastic integration with respect to a semicircularBrownian motion was developed by Biane and Speicher [5]. This paper is founda-tional to the whole theory of free stochastic calculus and gave the first version of afree Ito formula [5, Proposition 4.3.4]. We will need an extension of that result toa pair of freely independent semicircular Brownian motions. If xr and xr are twofreely independent semicircular Brownian motions, they satisfy the following freeIto rules for a continuous adapted process Ar:
tr[Ar dxr] = tr[Ar dxr] = 0
dxr Ar dxr = dxr Ar dxr = tr[Ar] dr
dxr Ar dxr = dxr Ar dxr = 0
dxr Ar dr = dr Ar dxr = 0, (4.5)
together with a stochastic product rule for processes m1r and m2
r satisfying SDE’sinvolving xr and xr
d(m1m2)r = dm1rm
2r +m1
1 dm2r + (dm1
r)(dm2r). (4.6)
These rules are widely used in the literature and were established by Kummererand Speicher in the setting of the Cuntz algebra [25]. We will use a general form ofthese rules developed by Nikitopoulos [30, Theorem 3.2.5], stated in an equivalentform for a circular Brownian motion and its adjoint.
The following Ito rules for the Brownian motions ws,τ introduced in Section 2.1can be obtained easily from (4.5):
tr[Ar dws,τ (r)] = tr[Ar dw∗s,τ (r)] = 0, (4.7)
and
dws,τ (r)Ar dw∗s,τ (r) = dw∗s,τ (r)Ar dws,τ (r) = s tr[Ar] dr
dws,τ (r)Ar dws,τ (r) = (s− τ) tr[Ar] dr
dw∗s,τ (r)Ar dw∗s,τ (r) = (s− τ) tr[Ar] dr (4.8)
and
dws,τ (r) Ar dr = dr Ar dws,τ (r) = 0
dw∗s,τ (r) Ar dr = dr Ar dw∗s,τ (r) = 0. (4.9)
![Page 29: arXiv:2104.07859v1 [math.PR] 16 Apr 2021](https://reader034.fdocument.org/reader034/viewer/2022042718/62676707814e77464c2343d3/html5/thumbnails/29.jpg)
BROWN MEASURE OF BROWNIAN MOTIONS 29
4.4. The PDE with respect to r. We will make use of the following result.
Theorem 4.3 (Factorization Theorem). Choose s, s′ ≥ 0 and τ, τ ′ ∈ C so that|τ − s| ≤ s and |τ ′ − s′| ≤ s′. Let bs,τ and b′s′,τ ′ be two elements constructed as
in Notation 2.1 but chosen to be freely independent. Then bs+s′,τ+τ ′ and bs,τ b′s′,τ ′
have the same ∗-distribution.
The proof of Theorem 4.3 is subtle and is deferred to Appendix A.Define
g = ubs,τ b′s′,τ ′(r)
and then set
P (r, λ, ε) = tr[log((g − λ)∗(g − λ) + ε2)], (4.10)
where b′s′,τ ′(r) is freely independent of bs,τ and u and where s, s′, τ, and τ ′ are
fixed. By Theorem 4.3 and the fact that bs′,τ ′(r) has the same ∗-distribution asbrs′,rτ ′(1), we see that
P (r, λ, ε) = S(s+ rs′, τ + rτ ′, λ, ε). (4.11)
We note that the process ubs,τ b′s′,τ ′(r) satisfies the same SDE as b′s′,τ ′(r), but with
a different initial condition.
Theorem 4.4. The function P satisfies the PDE
∂P
∂r= Re
[τ ′
4
(1−
(1− ε∂T
∂ε− 2λ
∂T
∂λ
)2)]
+ s′Re
[λ2
(∂T
∂λ
)2
− λ∂T∂λ
+|λ|2
4
(∂T
∂ε
)2]. (4.12)
Remark 4.5. If we take s = τ = 0 and s′ = τ ′ = 1, then the function P in (4.10)becomes S(r, r, λ, ε), which is the function considered in [13] and [23]—except thatthose papers regularize with ε instead of ε2. In this case, the PDE (4.12) simplifiesto
∂P
∂r=∂P
∂ε
(ε
2+
(|λ|2 − ε2
4
)∂P
∂ε− ε
2
(x∂P
∂x+ y
∂P
∂y
))where λ = x + iy. This is just the PDE in [13] and [23], after making the changeof variable ε 7→ ε2 to account for the difference in regularization (ε in [13] and [23]and ε2 here).
We will prove Theorem 4.4 after establishing some preliminary results. We usethe notation
g = ubs,τ b′s′,τ ′(r)
gλ = g − λmr = g∗λgλ
R = (mr + ε2)−1.
Note that
P (r, λ, ε) = tr[log(mr + ε2)]. (4.13)
![Page 30: arXiv:2104.07859v1 [math.PR] 16 Apr 2021](https://reader034.fdocument.org/reader034/viewer/2022042718/62676707814e77464c2343d3/html5/thumbnails/30.jpg)
30 BRIAN C. HALL AND CHING-WEI HO
Proposition 4.6. We have
∂
∂rP (r, λ, ε) =
tr [R dmr]
dr− 1
2
tr [R dmr R dmr]
dr(4.14)
where
tr [R dmr]
dr= −s− τ
2tr [Rg∗gλ]− s− τ
2tr [Rg∗λg] + s tr [g∗g] tr [R] (4.15)
and
tr [R dmr R dmr]
dr= −2 Re {(s− τ) tr [Rg∗λg] tr [Rg∗λg]}
+ 2s tr [R] tr [Rg∗λgg∗gλ] . (4.16)
Observe that the right-hand sides of (4.15) and (4.16) involve g and g∗ in additionto gλ = g−λ and g∗λ = (g−λ)∗. Since the derivatives of Sτ with respect to λ and ε(Lemma 4.7) involve only gλ and g∗λ, we will eventually need to rewrite g as gλ + λand simplify in (4.15) and (4.16).
Proof. Using (4.13), we can see that the expression (4.14) is a consequence of Eq.(33) in Example 3.5.5 of [30]. To compute more explicitly, we use the stochasticproduct rule (4.6) to obtain
dmr = (dg∗)gλ + g∗λ(dg) + (dg∗)(dg), (4.17)
and then compute dg and dg∗ (thinking of r as the time variable) using the SDE(2.6) for bs′,τ ′(r). When computing tr [R dmr] /dr, we use (4.7) and (4.9), whichtell us that we keep only the dr terms in the formulas for dg and dg∗ in the first twoterms on the right-hand side of (4.17), but that we can drop the dr terms in the lastterm on the right-hand side of (4.17). Three terms will remain, which correspondto the three terms in (4.15).
We then compute that
tr [Rdmr Rdmr] = tr {R [(dg∗)gλ + g∗λ(dg)]R [(dg∗)gλ + g∗λ(dg)]} , (4.18)
where we note that the (dg∗)(dg) term in (4.17) does not contribute here. Further-more, the dr terms in the formula for dg and dg∗ do not contribute. We are thenleft with four terms, which we compute using (4.8) to obtain (4.16). �
Lemma 4.7. We have
∂P
∂ε= 2ε tr [R] ;
∂P
∂λ= − tr [Rg∗λ] ;
∂P
∂λ= − tr [Rgλ] .
Proof. Direct calculation using Lemma 1.1 in Brown’s paper [6], which states that
d
dutr [log(f(u))] = tr
[f(u)−1 df
du
]for any smooth function f(u) taking values in the set of strictly positive elementsof A. �
We now provide the proof of Theorem 4.4.
Proof of Theorem 4.4. Our strategy is (1) to simplify the results in (4.15) and (4.16)using the relations g = gλ + λ, g∗ = g∗λ + λ, and
Rg∗λgλ = R(g∗λgλ + ε− ε) = 1− εR,
![Page 31: arXiv:2104.07859v1 [math.PR] 16 Apr 2021](https://reader034.fdocument.org/reader034/viewer/2022042718/62676707814e77464c2343d3/html5/thumbnails/31.jpg)
BROWN MEASURE OF BROWNIAN MOTIONS 31
and (2) to express the resulting expressions in terms of derivatives of P with respectto λ and ε using Lemma 4.7. There is, however, a difficulty with this approach,namely that the last term in (4.15) and the last term in (4.16) will give rise to“bad” terms (such as tr [g∗λgλ]) that do not show up in Lemma 4.7. Fortunately,the bad terms arising from (4.15) cancel with the bad terms arising from (4.16).We omit the details of the argument, which is similar to the proof of Theorem 2.8in Section 5 of [13]. �
4.5. The PDE with respect to τ . We now prove Theorem 4.2, establishing thePDE (4.2).
Proof of Theorem 4.2. Recall the definition of P in (4.10) that
P (r, λ, ε) = S(s+ rs′, τ + rτ ′, λ, ε).
If we differentiate both sides of this relation with respect to r at r = 0, using thechain rule, we obtain
∂P
∂r
∣∣∣∣r=0
= s′∂S
∂s(s, τ, λ, ε) + τ ′
∂S
∂τ(s, τ, λ, ε) + τ ′
∂S
∂τ ′(s, τ, λ, ε).
We can then compute ∂S/∂τ as
∂S
∂τ=
∂
∂τ ′
(∂P
∂r
∣∣∣∣r=0
).
If we evaluate the PDE (4.12) at r = 0 and then differentiate the right-hand sidewith respect to τ ′, we obtain (4.2). �
5. The Hamilton–Jacobi analysis
5.1. The complex-time Hamilton–Jacobi formulas. We now analyze solu-tions to the PDE (4.2). We introduce the complex-valued Hamiltonian function byreplacing ∂S/∂λ by pλ and ∂S/∂ε by pε on the right-hand side of (4.2), with anoverall minus sign:
H(λ, ε, pλ, pε) = −1
8
[1− (1− εpε − 2λpλ)
2]. (5.1)
Here the variables λ and pλ are complex valued and the variables ε and pε are realvalued. Define
pλ,0 =∂
∂λ0S(s, 0, λ0, ε0) (5.2)
pε,0 =∂
∂ε0S(s, 0, λ0, ε0). (5.3)
Writing S(s, 0, λ0, ε0) as in (4.3), we obtain
pλ,0 = −∫S1
ξ − λ|ξ − λ0|2 + ε2
0
dµs(ξ) (5.4)
and
pε,0 =
∫S1
1
|ξ − λ0|2 + ε20
dµs(ξ). (5.5)
![Page 32: arXiv:2104.07859v1 [math.PR] 16 Apr 2021](https://reader034.fdocument.org/reader034/viewer/2022042718/62676707814e77464c2343d3/html5/thumbnails/32.jpg)
32 BRIAN C. HALL AND CHING-WEI HO
Then define curves λ(τ), ε(τ), pλ(τ), and pε(τ) by
λ(τ) = λ0 exp{τ
2(ε0pε,0 + 2λ0pλ,0 − 1)
}(5.6)
ε(τ) = ε0 exp{
Re[τ
2(ε0pε,0 + 2λ0pλ,0 − 1)
]}(5.7)
pλ(τ) = pλ,0 exp{−τ
2(ε0pε,0 + 2λ0pλ,0 − 1)
}(5.8)
pε(τ) = pε,0 exp{−Re
[τ2
(ε0pε,0 + 2λ0pλ,0 − 1)]}
(5.9)
Note that λ(τ) and pλ(τ) are complex valued, while ε(τ) and pε(τ) are real valued.We now derive Hamilton–Jacobi formulas for solutions to the PDE (4.2).
Theorem 5.1. For all τ with |τ − s| ≤ s, we have the first Hamilton–Jacobi for-mula
S(s, τ, λ(τ), ε(τ)) = S(s, 0, λ0, ε0) + 2 Re[τH0] +1
2Re [τ(ε0pε,0 + 2λ0pλ,0)] , (5.10)
where H0 = H(λ0, ε0, pλ,0, pε,0), and the second Hamilton–Jacobi formulas
∂S
∂λ(s, τ, λ(τ), ε(τ)) = pλ(τ) (5.11)
∂S
∂ε(s, τ, λ(τ), ε(τ)) = pε(τ). (5.12)
Note that the ordinary Hamilton–Jacobi method is not directly applicable tothe PDE (4.2), because the “time” variable τ in that equation is complex. Ourmethod for proving Theorem 5.1 will then be to reduce the problem to an ordinaryHamilton–Jacobi PDE with real time variable.
5.2. Ordinary Hamilton–Jacobi method. Our strategy for proving Theorem5.1 is to consider the function
Sτ (s, t, λ, ε) := S(s, tτ, λ, ε), (5.13)
where t is a positive real number. Note that on the right-hand side of (5.13), weare scaling the complex number τ by the positive real number t. With τ fixed,Sτ (s, t, λ, ε) is defined for all t such that |tτ − s| ≤ s.
Proposition 5.2. The function Sτ satisfies the PDE
∂Sτ
∂t= Re
[τ
4
(1−
(1− ε∂S
τ
∂ε− 2λ
∂Sτ
∂λ
)2)]
(5.14)
for all t such that |tτ − s| < s, with the initial condition at t = 0 given by
Sτ (s, 0, λ, ε) = tr[log((uus − λ)∗(uus − λ) + ε2)] (5.15)
The PDE for Sτ is of ordinary Hamilton–Jacobi type with respect to the realtime variable t. Note that the coefficients of the PDE in (5.14) do not depend ons; the s-dependence in the problem is only in the initial condition (5.15).
Proof. Using the chain rule in the definition (5.13) of Sτ , we find that
∂Sτ
∂t= τ
∂S
∂τ+ τ
∂S
∂τ.
The result now follows from the PDE (4.2) for S. �
![Page 33: arXiv:2104.07859v1 [math.PR] 16 Apr 2021](https://reader034.fdocument.org/reader034/viewer/2022042718/62676707814e77464c2343d3/html5/thumbnails/33.jpg)
BROWN MEASURE OF BROWNIAN MOTIONS 33
We will analyze the function Sτ using the Hamilton–Jacobi method. The fol-lowing proposition recalls the general Hamilton–Jacobi method.
Proposition 5.3. Fix an open set U ⊂ Rn, a time-interval [0, T ], and a functionH(x,p) : U × Rn → R. Consider a function S(t,x) satisfying
∂S
∂t= −H(x,∇xS), x ∈ U, t ∈ [0, T ].
Consider a curve (x(t),p(t)) with x(t) ∈ U, p(t) ∈ Rn, and t ranging over aninterval [0, T1] with T1 ≤ T. Assume this curve satisfies Hamilton’s equations:
dxjdt
=∂H
∂pj(x(t),p(t));
dpjdt
= − ∂H∂xj
(x(t),p(t)) (5.16)
with initial conditions of the special form
x(0) = x0; p(0) = (∇xS)(0,x0). (5.17)
Then we have
S(t,x(t)) = S(0,x0)− t H(x0,p0) +
∫ t
0
p(s) · dxds
ds (5.18)
and(∇xS)(t,x(t)) = p(t). (5.19)
See the proof of Proposition 5.3 in [13] for a self-contained proof and see alsoSection 3.3 in the book [14] of Evans.
We now record how this general result looks in the case of the function Sτ (s, t, λ, ε),taking the open set U to be the set of (s, λ, ε) with ε > 0. Recall that we writeλ = x+ iy. We use the notation
pλ =1
2(px − ipy)
pλ =1
2(px + ipy). (5.20)
This is a convenient notation, so that pλ and pλ correspond to ∂Sτ/∂λ and ∂Sτ/∂λ,respectively, in the PDE and in the second Hamilton–Jacobi formula. We thencompute that (
∂
∂px+ i
∂
∂py
)pλ = 1;
(∂
∂px− i ∂
∂py
)pλ = 0;(
∂
∂px+ i
∂
∂py
)pλ = 0;
(∂
∂px− i ∂
∂py
)pλ = 1. (5.21)
The Hamiltonian, read off (with a minus sign) from the PDE (5.14), is
Hτ = −τ14
+ Re[τ
4(εpε + 2λpλ − 1)2
], (5.22)
where τ1 is the real part of τ.We now use the notation λτ , ετ , pτλ, and pτε for solutions to Hamilton’s equations
with Hamiltonian Hτ .
Proposition 5.4. Suppose (λτ (t), ετ (t), pτλ(t), pτε (t)) satisfies the Hamilton’s equa-tions (5.16) with Hamiltonian Hτ , with ετ (t) > 0 and initial conditions computedas in (5.17). Then for all t > 0 such that |tτ − s| < s, we have
Sτ (s, t, λτ (t), ετ (t)) = Sτ (s, 0, λ0, ε0) + tHτ0 + tRe
[τ2
(ε0pε,0 + 2λ0pλ,0)], (5.23)
![Page 34: arXiv:2104.07859v1 [math.PR] 16 Apr 2021](https://reader034.fdocument.org/reader034/viewer/2022042718/62676707814e77464c2343d3/html5/thumbnails/34.jpg)
34 BRIAN C. HALL AND CHING-WEI HO
where Hτ0 is the value of the Hamiltonian at t = 0. Furthermore,
∂Sτ
∂λ(s, t, λτ (t), ετ (t)) = pτλ(t)
∂Sτ
∂λ(s, t, λτ (t), ετ (t)) = pτλ(t)
∂Sτ
∂ε(s, t, λτ (t), ετ (t)) = pτε (t). (5.24)
Proof. In the general Hamilton–Jacobi method, we note that dxj/ds = ∂H/∂pj , sothat p(s) · dx/ds = p(s) · ∇pH(x(s),p(s)). We then note that the operator p · ∇p
is the homogeneity operator in the p variables, acting as k times the identity ona function that is homogeneous of degree k in p. We then write the Hamiltonian(5.22) as Hτ = H2 +H1, with
H2 = Re[τ
4(εpε + 2λpλ)2
]; H1 = −Re
[τ2
(εpε + 2λpλ)],
where H2 and H1 are homogeneous of degrees 2 and 1, respectively, in p. (Theterms of degree zero in p cancel.) Thus,
p · ∇pHτ = 2H2 +H1 = 2Hτ −H1.
It is then easy to check that Hτ and H1 are both constants of motion, so that∫ t0
p(s)·dx/ds ds equals t times the value of 2Hτ−H1 at t = 0. The claimed formula(5.10) then follows easily. Meanwhile, (5.11) and (5.12) follows immediately fromthe general formula (5.19), together with the definitions (5.20) of pλ and pλ. �
Proposition 5.5. Suppose τ is a nonzero complex number such that |τ − s| = s.Then the Hamilton–Jacobi formulas (5.23) and (5.24) continue to hold at t = 1.
Note that in the borderline case |τ − s| = s, we have only established that thePDE (5.14) holds for t < 1. (See Theorem 5.2.) The Proposition says that theHamilton–Jacobi formulas nevertheless remain valid at t = 1.
Proof. We will show in Appendix B that the element bs,τ in Notation 2.1 dependscontinuously (in the operator norm topology) on the parameter τ, for all τ satisfying|τ − s| ≤ s. (See Theorem B.2.) Let us then fix a nonzero τ with |τ − s| = s. Wewill use the continuity of the operator logarithm on strictly positive self-adjointoperators, which may be established by expanding the function log x in a Taylorseries based at a, for some large positive a. It is then easily verified that the functionSτ (s, t, λ, ε) in and its derivatives with respect to λ and ε (computed in Lemma 4.7)depend continuously on the operator bs,τ and therefore also on τ, even up to theboundary. We may therefore let t tend to 1 on both sides of the Hamilton–Jacobiformulas (5.23) and (5.24). �
Following the general Hamilton–Jacobi method (as in (5.17)), the initial momen-tum pλ,0 is computed as
pλ,0 =∂
∂λ0Sτ (s, 0, λ0, ε0).
Since Sτ (s, 0, λ0, ε0) = S(s, 0, λ0, ε0), we see that the initial momentum pλ,0 asso-ciated to Sτ agrees with the initial momentum pλ,0 associated to S, as in (5.2). Asimilar statement applies to the initial momentum pε,0.
![Page 35: arXiv:2104.07859v1 [math.PR] 16 Apr 2021](https://reader034.fdocument.org/reader034/viewer/2022042718/62676707814e77464c2343d3/html5/thumbnails/35.jpg)
BROWN MEASURE OF BROWNIAN MOTIONS 35
5.3. Proof of the main theorem. We now prove Theorem 5.1.
Proof of Theorem 5.1. From the definition (5.13) of Sτ , we have
S(s, τ, λ, ε) = Sτ (s, t, λ, ε)|t=1 . (5.25)
Thus, to compute S(s, τ, λ, ε), we will apply the Hamilton–Jacobi analysis in theprevious subsection and then evaluate at t = 1. It is therefore natural to define
λ(τ) = λτ (t)|t=1 ; ε(τ) = ετ (t)|t=1 ;
pλ(τ) = pτλ(t)|t=1 ; pε(τ) = pτε (t)|t=1 . (5.26)
As noted in the previous subsection, the initial momenta pλ,0 and pε,0 associatedto pτλ and pτε agree with the initial momenta in the statement of the complex-timeHamilton–Jacobi formulas, as in (5.2) and (5.3), because Sτ (s, 0, λ, ε) coincideswith S(s, 0, λ, ε).
We now show that the curves in (5.26) are given by the formulas in (5.6)-(5.9).We have, for example,
dλτ
dt=dxτ
dt+ i
dyτ
dt=
(∂
∂pτx+ i
∂
∂pτy
)Hτ .
Then in (5.22), we write the real part as half the sum of the indicated expressionand its conjugate. Using (5.21), this gives
dλτ
dt=τ
2(ετpτε + 2λτpτλ − 1)λτ .
Since λτpτλ and ετpτε are constants of motion, as the reader may easily verify, wefind
λτ (t) = λ0 exp
{tτ
2(ε0pε,0 + 2λ0pλ,0 − 1)
}.
Setting t = 1 gives the curve in (5.6). The verifications for the remaining curvesare extremely similar.
Using (5.25), we can easily see that the Hamilton–Jacobi formulas (5.10), (5.11),and (5.12) are just restatements of (5.23) and (5.24) using the curves defined in(5.26). By Proposition 5.5, the formulas continue to hold in the borderline case|τ − s| = s. �
5.4. The ε0 = 0 case. We now wish to look at what happens to the curves λ(τ) andε(τ) in the limit as ε0 approaches zero from above. (We are not currently claimingthat the Hamilton–Jacobi formulas remain valid up to ε0 = 0; we are merely lookingat the limiting behavior of the curves.) In the formulas (5.6) and (5.7), the limit isobtained by simply setting ε0 = 0, provided that the initial momenta pε,0 and pλ,0remain defined in this limit. But looking at the formulas in (5.4) and (5.5), we seethat if ε0 = 0 and λ0 belongs to the closed support supp(µs) of µs, then the integralsdefining pε,0 and pλ,0 may be divergent. We therefore assume λ0 /∈ supp(µs) in thefollowing result.
Proposition 5.6. Suppose λ0 /∈ supp(µs). Then with ε0 = 0, we have
2λ0pλ,0 − 1 = −∫S1
ξ + λ0
ξ − λ0dµs(ξ), (ε0 = 0). (5.27)
![Page 36: arXiv:2104.07859v1 [math.PR] 16 Apr 2021](https://reader034.fdocument.org/reader034/viewer/2022042718/62676707814e77464c2343d3/html5/thumbnails/36.jpg)
36 BRIAN C. HALL AND CHING-WEI HO
We also have the alternative formula
2λ0pλ,0 − 1 = −∫S1
ξ + χs(λ0)
ξ − χs(λ0)dµ0(ξ), (ε0 = 0), (5.28)
where χs is the inverse function to fs. Note that the integral in (5.27) is with respectto µs (the law of uus) while the integral in (5.28) is with respect to µ0 (the law ofu).
When ε0 = 0, the formula for λ(τ) in (5.6) becomes
λ(τ) = fs−τ (χs(λ0)), (5.29)
while the formula for ε(τ) in (5.7) becomes
ε(τ) ≡ 0.
Corollary 5.7. For each fixed τ, consider the map
λ0 7→ λ(τ)
where λ(τ) is computed with λ(0) = λ0 and ε0 = 0. Then this map is a biholomor-phism of C \ supp(µs) onto (Σs,τ )c.
Proof. By Definition 2.3, χs maps C \ supp(µs) to the complement of Σs = Σsand by the last point in Proposition 3.1, the complement of Σs does not intersectsupp(µs). Thus, the Herglotz integral J in (3.7) is defined and holomorphic onthe complement of supp(µs) and also on the complement of Σs. Thus, the right-hand side of (5.29) is a holomorphic function of λ0. The claimed bijectivity of themap then follows from the definitions of the domains in Definitions 2.3 and 2.5,the injectivity of fs−τ in Theorem 3.8, and the fact that Σs,τ is the closure of itsinterior. (This last point follows from the proof of Theorem 3.3 in Section 3.5.) �
Proof of Proposition 5.6. From the definition (5.20) of pλ, we have
pλ,0 =∂
∂λ0S(s, 0, λ0, ε0).
If we then specialize to the case ε0 = 0, we have
2λ0pλ,0 − 1 = 2λ0∂
∂λ0
∫S1
log(|λ0 − ξ|2) dµs(ξ)− 1
= 2
∫S1
λ0
λ0 − ξdµs(ξ)− 1
= −∫S1
ξ + λ0
ξ − λ0dµs(ξ),
provided that λ0 is outside the closed support of µs, establishing (5.27).We now apply results from Zhong’s paper [36], specifically, the relation ηµt(z) =
ηµ(ηt(z)) on p. 1357, after Theorem 2.1, along with Eq. (2.1) and the relationΦt,µ(ηρt(z)) = z following Lemma 2.2. The relation ηµt(z) = ηµ(ηt(z)) implies alsothat ψµt(z) = ψµ(ηt(z)), where ψµ is defined on p. 1356 of [36]. If we apply thislast result with Zhong’s µ corresponding to our µ0 (the pushforward of µ0 underthe complex-conjugation map) and Zhong’s µt corresponding to our µs, we findthat Zhong’s function ηt corresponds to our χs and we get the relation∫
S1
ξ + λ0
ξ − λ0dµs(ξ) =
∫S1
ξ + χs(λ0)
ξ − χs(λ0)dµ0(ξ), (5.30)
![Page 37: arXiv:2104.07859v1 [math.PR] 16 Apr 2021](https://reader034.fdocument.org/reader034/viewer/2022042718/62676707814e77464c2343d3/html5/thumbnails/37.jpg)
BROWN MEASURE OF BROWNIAN MOTIONS 37
establishing (5.28). The identity (5.30) initially holds for |λ0| < 1, but extends to|λ0| > 1 by the identities (3.23) and (2.9) and then to λ0 /∈ supp(µs) by continuity.
Meanwhile, when ε0 = 0, we have ε0pε,0 = 0 and (5.28) applies, so that theformula for λ(τ) in (5.6) becomes
λ(τ) = λ0 exp
{−τ
2
∫S1
ξ + χs(λ0)
ξ − χs(λ0)dµ0(ξ)
}.
Now, we can compute that
fs−τ (z) = fs(z) exp
{−τ
2
∫S1
ξ + z
ξ − zdµ0(ξ)
}.
Applying this result with z = χs(λ0) and recalling that χs is a right inverse of fsgives the claimed formula (5.29). �
6. Outside the domain
6.1. Outline. Our goal is to compute the function
S0(s, τ, λ) := limε→0+
S(s, τ, λ, ε), (6.1)
using the Hamilton–Jacobi formulas (5.10), (5.11), and (5.12). We wish to choosethe initial conditions λ0 and ε0—with the initial momenta given by (5.4) and (5.5)—so that λ(τ) is very close to λ and ε(τ) is very close to zero. From the formula(5.7), we see that if ε0 approaches zero, then ε(τ) will also approach zero.
The obstruction to letting ε0 approach 0 is that if ε0 = 0 and λ0 is in the closedsupport of the measure µs (inside the unit circle), then the integrals (5.4) and (5.5)defining the initial momenta may be singular. Thus, in this section, we alwaysassume that λ0 is outside supp(µs).
For λ0 ∈ supp(µs)c, we have already analyzed in Section 5.4 the behavior the
solution λ(τ) in the limit as ε0 approaches zero. Let us then assume that we cansimply set ε0 = 0 in the second Hamilton–Jacobi formulas (5.11) and (5.12). Notethat we are not really allowed to do this, because S(s, τ, λ, ε) is not known aheadof time to be smooth up to ε = 0; this is a point we will need to return to later. Ifwe multiply (5.11) by λ(τ) and set ε0 = 0, then ε(τ) = 0 and we obtain
λ(τ)∂S
∂λ(s, τ, λ(τ), 0) = λ(τ)pλ(τ) = λ0pλ,0,
where the second equality is evident from the formulas (5.6) and (5.8) for λ(τ) andpλ(τ).
Now, since ε0 = 0, the formula (5.29) in Proposition 5.6 applies:
λ(τ) = fs−τ (χs(λ0)).
Furthermore, Corollary 5.7 tell us that fs−τ ◦ χs maps supp(µs)c injectively onto
(Σs,τ )c. Thus, for λ ∈ (Σs,τ )c, we may choose
λ0 = (fs−τ ◦ χs)−1(λ), (6.2)
so that λ0 depends holomorphically on λ. Thus, we obtain
λ∂S
∂λ= λ0pλ,0|λ0=(fs−τ◦χs)−1(λ) , λ ∈ (Σs,τ )c. (6.3)
Finally, we note from (5.27) in Proposition 5.6 that λ0pλ,0 depends holomorphi-cally on λ0, for λ0 outside supp(µs). Thus, we conclude from (6.3) that λ∂S/∂λ
![Page 38: arXiv:2104.07859v1 [math.PR] 16 Apr 2021](https://reader034.fdocument.org/reader034/viewer/2022042718/62676707814e77464c2343d3/html5/thumbnails/38.jpg)
38 BRIAN C. HALL AND CHING-WEI HO
is a holomorphic function of λ, for λ outside Σs,τ . Thus, ∂S/∂λ is also holomor-
phic outside Σs,τ , except possibly at the origin. But we will see below that the
singularity at the origin is removable, so ∂S/∂λ is holomorphic on all of (Σs,τ )c.Thus,
∆λS0(s, τ, λ) = 4∂
∂λ
∂S0
∂λ= 0 (6.4)
for λ outside of Σs,τ , showing that the Brown measure is zero there.In the next section, we will make the argument sketched here rigorous.
6.2. Details. We use Definitions 2.3 and 2.5 along with Theorem 3.3 and theinjectivity of fs−τ (Theorem 3.8) and the injectivity of χs (from the relationfs(χs(z)) = z). These results tell us that fs−τ ◦ χs maps supp(µs)
c injectivelyonto (Σs,τ )c. Our main objective in this section is to rigorize the argument pre-
sented in Section 6.1, showing that the Brown measure µs,τ is zero outside Σs,τ .Our first main result is a refinement of (6.3). Recall the definition (6.1) of S0.
Theorem 6.1. For all λ outside Σs,τ , we have
λ∂S0
∂λ(s, τ, λ) = χs−τ (λ)
∫S1
1
χs−τ (λ)− ξdµ0(ξ) (6.5)
and the Brown measure µs,τ is zero outside Σs,τ . Here, χs−τ is the inverse functionto fs−τ , which exists by Definition 2.5 and Theorem 3.8.
The reason that the argument in Section 6.1 is not rigorous is that we are notallowed to put ε0 = 0—which results in ε(τ) = 0 for all τ—in the Hamilton–Jacobiformulas (5.10), (5.11), and (5.12). After all, S(s, τ, λ, ε) is only defined for ε > 0and is not known ahead of time to have a smooth extension up to ε = 0.
Our strategy will then be to prove that S(s, τ, λ, ε) does have a smooth extensionto ε = 0, for λ ∈ (Σs,τ )c. To do this, we look at the map (λ0, ε0) 7→ (λ(τ), ε(τ)) for afixed τ. This map is defined by solving the Hamilton’s equations with Hamiltonian(5.22) and, as we will see, it makes perfect sense for ε0 = 0, provided λ0 is outsidethe closed support of the measure µs. We will show that this map has a smoothinverse at (λ0, 0) and then use the inverse function theorem and the first Hamilton–Jacobi formula to construct the smooth extension of S.
Proposition 6.2. Consider a map Ψτ mapping C× (0,∞) into C× (0,∞) givenby
Ψτ (λ0, ε0) = (λ(τ), ε(τ)),
where λ(τ) and ε(τ) are computed with λ(0) = λ0, ε(0) = ε0, and the initial mo-menta given by (5.4) and (5.5). Then for all λ0 ∈ supp(µs)
c, the map extendssmoothly to ε0 = 0 and the Jacobian of Ψτ at (λ0, 0) is invertible.
Proof. As long as λ0 is outside the closed support of µs, the formulas (5.4) and (5.5)defining the initial momenta pλ,0 and pε,0 remain well defined and smooth even ifε0 = 0. The formulas (5.6) and (5.7) for λ(τ) and ε(τ) then depends smoothly onλ0 and ε0.
We then compute the Jacobian of Ψτ at (λ0, 0), writing λ0 = x0 + iy0. If wedifferentiate (5.7) and then evaluate at ε0 = 0, the leading factor of ε0 in the formulagives a simple result:
∂ε
∂x0= 0;
∂ε
∂x0= 0;
∂ε
∂ε0= exp
{Re[τ
2(2λ0pλ,0 − 1)
]}. (6.6)
![Page 39: arXiv:2104.07859v1 [math.PR] 16 Apr 2021](https://reader034.fdocument.org/reader034/viewer/2022042718/62676707814e77464c2343d3/html5/thumbnails/39.jpg)
BROWN MEASURE OF BROWNIAN MOTIONS 39
Meanwhile, when ε0 = 0, we may use the formula (5.29): λ(τ) = fs−τ (χs(λ0)).Thus, the Jacobian of Ψτ at (λ0, 0) has the form(
J ∗0 ∂ε
∂ε0
),
where J is the 2× 2 Jacobian of the map fs−τ ◦ χs and the value of ∗ is irrelevant.Since, by the identity fs(χs(z)) = z and Theorem 3.8, fs−τ ◦ χs is an injectiveholomorphic map, its complex derivative cannot be zero and therefore J must beinvertible. Since, also, ∂ε/∂ε0 is positive by (6.6), we find that the Jacobian of Ψτ
is invertible. �
Proposition 6.3. Fix τ with |τ − s| ≤ s and a point λ ∈ (Σs,τ )c. Then the map
(λ, ε) 7→ S(s, τ, λ, ε),
initially defined for ε > 0, has a smooth extension defined for (λ, ε) in a neighbor-
hood of (λ, 0).
Proof. We define a function HJ(τ, λ0, ε0) by the right-hand side of the first Hamilton–Jacobi formula (5.10), namely
HJ(s, τ, λ0, ε0) = S(s, 0, λ0, ε0) + 2 Re[τH0] +1
2Re [τ(ε0pε,0 + 2λ0pλ,0)] ,
where it is understood that the initial momenta pλ,0 and pε,0 are always computed
as functions of λ0 and ε0 as in (5.4) and (5.5). Fix λ in (Σs,τ )c. As in (6.2), we
can find λ0 in supp(µs)c so that with ε0 = 0, we have λ(τ) = λ. By Proposition
6.2 and the inverse function theorem, Ψτ is invertible near (λ0, 0). Since, by (5.7),ε(τ) always has the same sign as ε0, we see that the ε0-component of Ψ−1
τ (λ, ε) ispositive whenever ε is positive. We then consider the function
S(s, τ, λ, ε) = HJ(s, τ,Ψ−1τ (λ, ε)),
which is a smooth function. Since the first Hamilton–Jacobi formula tells us thatS agrees with S when ε > 0, we see that S is the desired extension. �
Proof of Theorem 6.1. We fix λ in (Σs,τ )c and we use choose λ0 ∈ supp(µs)c so
that with ε0 = 0, we get λ(τ) = λ and ε(τ) = 0. (Such a λ0 exists by Corollary5.7.) We now multiply the second Hamilton–Jacobi formula (5.11) by λ(τ), usingthis value of λ0 and, initially, ε0 > 0:
λ(τ)∂S
∂λ(s, τ, λ(τ), ε(τ)) = λ(τ)pλ(τ) = λ0pλ,0.
As ε0 tends to zero, λ(τ) tends to λ and ε(τ) tends to 0. Thus, by the regularityof S established in Proposition 6.3, we may let ε0 tend to zero and obtain
λ∂S0
∂λ(s, τ, λ) = λ0pλ,0.
We now apply the formula (5.28), from which we can easily solve for λ0pλ,0, toget
λ∂S0
∂λ(s, τ, λ) = χs(λ0)
∫S1
1
χs(λ0)− ξdµ0(ξ). (6.7)
Finally, we recall that λ = fs−τ (χs(λ0)), so that (recalling that χs is the inversefunction to fs), λ0 = fs(χs−τ (λ)). Plugging this value for λ0 into (6.7) gives theclaimed formula (6.5) for λ∂S/∂λ. If we divide (6.5) by λ and note that χs−τ (0) = 0,
![Page 40: arXiv:2104.07859v1 [math.PR] 16 Apr 2021](https://reader034.fdocument.org/reader034/viewer/2022042718/62676707814e77464c2343d3/html5/thumbnails/40.jpg)
40 BRIAN C. HALL AND CHING-WEI HO
we see that ∂S/∂λ has a removable singularity at the origin. Thus, ∂S/∂λ is aholomorphic function of λ ∈ (Σs,τ )c, so that as in (6.4), the Brown measure µs,τ is
zero on (Σs,τ )c. �
7. Inside the domain
We now briefly summarize the way the computation of the Brown measure “inthe domain” (that is, where it is not zero) works in the present paper, since this isthe main way our paper differs from earlier ones. In the present paper, as in earlierworks such as [13], [23], [10], and [20], one initially attempts to achieve the desiredcondition ε(τ) = 0 by taking ε0 = 0, leading to a determination of the region wherethe Brown measure is zero. But the way the idea of letting ε0 tend to zero fails towork is different here than in the previous works. In the just-cited papers, lettingε0 tend to 0 fails at points λ0 where, with ε0 = 0, the solution ceases to exist beforeone gets to the τ -value one is interested in. For each such λ0, one must look for apositive value of ε0 that gives ε(τ) = 0, and then compute the associated λ(τ).
The situation in the present paper is different in that the lifetime of the pathsis always infinite, even if ε0 tends to zero. (As a result, we are able to avoid theinvolved analysis of the lifetime of solutions in Sections 6.3 and 6.4 of [13] andSection 4.3 of [23].) In this paper, letting ε0 tend to 0 fails at points λ0 for whichthe initial momenta pε,0 and pλ,0 become ill defined in this limit. The set of suchpoints is one dimensional, consisting of the support of the measure µs inside theunit circle.
For points eiφ in supp(µs), we will let λ0 approach eiφ while simultaneouslyletting ε0 tend to zero. A key point is that approaching (eiφ, 0) along different pathsin (λ0, ε0)-space give different limiting values of λ(τ). Thus, although supp(µs) isone dimensional, the set of λ(τ)’s obtained will be two dimensional, consisting ofthe entire domain Σs,τ .
7.1. Outline. Recall the function φs introduced in Definition 3.2 and the functionδs,τ introduced in Theorem 3.3. For a point λ in Σs,τ with δ-coordinate δ, we letφs,τ (δ) be as in Notation 2.7, which means that
φs,τ (δ) = φs(θs,τ (δ)),
where θs,τ is the inverse function to δs,τ . This definition means simply that φ =φs,τ (δ) is related to δ as in Figures 8 and 9.
In this section, we provide an outline of the computation of the Brown measureµs,τ inside the domain Σs,τ , including a brief (but not entirely rigorous) derivationof the formula (1.8) for the Brown measure.
7.1.1. Mapping into the domain. Suppose we take ε0 = 0 and λ0 = eiφ, where thedensity of the measure µs at eiφ is positive. Then the initial momenta pλ,0 andpε,0 become ill defined, because the integrals (5.4) and (5.5) defining them are notabsolutely convergent. Now, if we take ε0 = 0 and we let λ0 approach such a pointeiφ, either from inside or from outside the unit circle, we get two different limitingvalues of λ(τ), both lying on the boundary of the domain Σs,τ . Specifically, thelimiting values of χs(λ0) will be rs(θ)e
iθ and rs(θ)−1eiθ, which are the two circled
points on the left-hand side of Figure 8; see [36, Proposition 2.3 and Proposition3.7]. The limiting values of λ(τ) = fs−τ (χs(λ0)) will then be as on the right-handside of Figure 9. To get limiting values of λ(τ) in the interior of Σs,τ , we will choose
![Page 41: arXiv:2104.07859v1 [math.PR] 16 Apr 2021](https://reader034.fdocument.org/reader034/viewer/2022042718/62676707814e77464c2343d3/html5/thumbnails/41.jpg)
BROWN MEASURE OF BROWNIAN MOTIONS 41
a family of paths in (λ0, ε0)-space approaching (eiφ, 0) so that the limiting value ofε(τ) is always zero, but value of λ(τ) depends on the path.
We compute the initial momenta in (untwisted) logarithmic coordinates ρ =log |λ| and θ = arg λ, so that the initial momenta are pρ,0, pθ,0, and pε,0, that is,the derivatives of S(s, 0, λ0, ε0) with respect to ρ, θ, and ε0. We will find paths in(λ0, ε0)-space approaching (eiφ, 0) so that: (1) ε0pε,0 always approaches zero, (2)pθ,0 approaches a single number independent of the choice of path, and (3) pρ,0 canapproach a whole range of different values, depending on the choice of path. Alongall paths, the value of ε(τ) will approach 0. We then compute the value of λ(τ) intwisted logarithmic coordinates and we find that the range of possible values forpρ,0 gives a range of possible values for the v-component of λ(τ), so that the valuesof λ(τ) trace out a segment of an exponential spiral in Σs,τ . As φ varies over allpoints where the density of φ is positive, these spiral segments will trace out thewhole domain Σs,τ . See Section 7.2 for details of this argument.
7.1.2. Computing the Brown measure. In this section, we use the twisted logarith-mic coordinates v and δ introduced previously:
v =1
τ1log |λ| ; δ = arg λ− τ2
τ1log |λ| .
We may easily verify the following formulas for the derivatives of S in those coor-dinates:
∂S
∂v= 2 Re
[τ λ
∂S
∂λ
]∂S
∂δ= −2 Im
[λ∂S
∂λ
], (7.1)
where, as usual, τ1 and τ2 are the real and imaginary parts of τ. We recall thenotation S0 for the function
S0(s, τ, λ) = limε→0+
S(s, τ, λ, ε).
We now use the second Hamilton–Jacobi formula (5.11), which gives a formulafor ∂S/∂λ at the point (s, τ, λ(τ), ε(τ)). As (λ0, ε0) approaches (eiφ, 0) along ourspecially chosen paths, ε(τ) tends to zero and λ(τ) tends to a point λ in Σs,τ . As-suming that S has a C1 extension to a neighborhood of (s, τ, λ, 0), we can multiplyby λ and let ε0 tend to zero in the second Hamilton–Jacobi formula to obtain
λ∂S0
∂λ(s, τ, λ) = λ(τ)pλ(τ) = λ0pλ,0, (7.2)
where the second equality follows directly from the formulas (5.6) and (5.8).Meanwhile, let us take the formula (5.6) for λ(τ) and evaluate the v-coordinates
of this point in our limiting case, where ε0 = 0 and |λ0| = 1. We obtain
v(τ) =1
τ1Re[τ
2(2λ0pλ,0 − 1)
]=
1
τ1Re
[τ
2
(2λ∂S0
∂λ− 1
)]=
1
2τ1
∂S0
∂v− 1
2, (7.3)
![Page 42: arXiv:2104.07859v1 [math.PR] 16 Apr 2021](https://reader034.fdocument.org/reader034/viewer/2022042718/62676707814e77464c2343d3/html5/thumbnails/42.jpg)
42 BRIAN C. HALL AND CHING-WEI HO
where we have used (7.2) and (7.1). A key point here is that v(τ) does not dependon the value of λ0, provided λ0 is in the unit circle.
We can solve (7.3) for ∂S0/∂v as
∂S0
∂v= 2τ1v + τ1. (7.4)
There are two remarkable features of this formula: first, that it is very simple andexplicit, and second that (inside the domain) ∂S0/∂v depends only on v and noton δ. We can then take another derivative and obtain
∂2S0
∂v2= 2τ1.
We now compute the δ-coordinate of λ(τ) (with ε0 = 0 and |λ0| = 1). After
computing that the δ-coordinate of eiθeτz is θ + |τ |2τ1
Im(z), we obtain
δ(τ) = arg λ0 +|τ |2
τ1Im [λ0pλ,0]
= arg λ0 −1
2
|τ |2
τ1
∂S0
∂δ,
from which we obtain∂S0
∂δ=
2τ1
|τ |2(arg λ0 − δ). (7.5)
This formula is not as explicit as the formula (7.4) for ∂S0/∂v because the resultdepends on the argument of the point λ0 in the unit circle.
Now, as discussed in Section 7.1.1, the point λ0 on the unit circle is related tothe point λ in Σs,τ as in Figures 8 and 9, so that arg λ0 = φs,τ (δ). Thus, taking asecond derivative, we obtain
∂2S0
∂δ2=
2τ1
|τ |2
(dφs,τ (δ)
dδ− 1
).
We then observe from (7.4) that ∂S0/∂v is independent of δ, so that the mixedderivative ∂2S0/∂δ∂v is zero. Using the easily computed formula for the Laplacianin (v, δ) coordinates, we obtain
∆λS0 =1
|λ|2
(1
τ21
∂2S
∂v2− 2
τ2τ21
∂2S
∂δ∂v+|τ |2
τ21
∂2S
∂δ2
)
=2
τ1
1
|λ|2dφ
dδ.
Conclusion 7.1. If the preceding argument can be made rigorous, the Brown mea-sure µs,τ in Σs,τ is given by
1
2πτ1
1
|λ|2dφ
dδdx dy
where λ = x+ iy. Here φ and δ are related as in Notation 2.7 or Figures 8 and 9.We therefore recover the claimed formula (1.8) for the Brown measure.
![Page 43: arXiv:2104.07859v1 [math.PR] 16 Apr 2021](https://reader034.fdocument.org/reader034/viewer/2022042718/62676707814e77464c2343d3/html5/thumbnails/43.jpg)
BROWN MEASURE OF BROWNIAN MOTIONS 43
-1.0 -0.5 0.5 1.0
-1.0
-0.5
0.5
1.0
eiϕc
-1 1 2
-1
1
2
Figure 11. A point eiφ is “blown up” into an interval by ap-proaching eiφ along curves of the form (7.6) with different valuesof c (left). This interval them maps to a portion of an exponentialspiral in Σs,τ (right). As φ varies over points where the density ofms is positive and c varies over R, the entire domain Σs,τ is sweptout
7.2. Surjectivity. In this section, we provide the details of the strategy outlinedin Section 7.1.1, consisting of letting ε0 approach zero while simultaneously lettingλ0 approach a point eiφ in the support of µs. By letting (λ0, ε0) approach (eiφ, 0)along different paths, we will get different limiting values of λ(τ), while still ensuringthat ε(τ) approaches 0. The following theorem shows that for any λ in Σs,τ , wecan find a point eiφ and a path in (λ0, ε0)-space approaching (eiφ, 0) so that thelimiting value of λ(τ) is λ.
We use the notationλ(τ ;λ0, ε0); ε(τ ;λ0, ε0)
to denote the curves λ(τ) and ε(τ) in (5.6) and (5.7) with the indicated initialconditions and with the initial momenta given by (5.4) and (5.5).
Theorem 7.2. Pick a point eiφ in S1 where the density of the measure µs is positiveand choose λ0 to have the form
λ0 = (1 + cε0)eiφ, c ∈ R. (7.6)
Then for all c ∈ R, we have
limε0→0+
ε(τ ; (1 + cε0)eiφ, ε0) = 0.
Furthermore, as c varies over R, the value of
λ(τ) = limε0→0+
λ(τ ; (1 + cε0)eiφ, ε0)
traces out a curve in Σs,τ with δ-coordinate fixed and v-coordinate varying betweenvs,τ1 (δ) and vs,τ2 (δ). As eiφ varies over all points where the density of µs is positiveand c varies over R, the value of λ(τ) fills out the entire domain Σs,τ .
Theorem 7.2 is illustrated in Figure 11.The key to proving Theorem 7.2 is to understand how the initial momenta—
that is, the derivatives of S(s, τ, λ0, ε0) at τ = 0—behave as (λ0, ε0) approaches(eiφ, 0) along a curve of the form (7.6). If we set τ = ε0 = 0, the resulting function
![Page 44: arXiv:2104.07859v1 [math.PR] 16 Apr 2021](https://reader034.fdocument.org/reader034/viewer/2022042718/62676707814e77464c2343d3/html5/thumbnails/44.jpg)
44 BRIAN C. HALL AND CHING-WEI HO
-2 -1 1 2
1
2
3
4
Figure 12. Schematic plots of S0(s, 0, eρ+iφ) (bottom) andS(s, 0, eρ+iφ, ε0), ε0 > 0 (top), as functions of ρ with φ fixed
S0(s, 0, λ0) is the logarithmic potential of the measure µs. This function has afold-type singularity along the portion of the unit circle where the density of µs ispositive.
The radial derivative of S0(s, 0, λ0) therefore has a jump discontinuity on portionsof the unit circle, while the angular derivative of S0(s, 0, λ0) is continuous. Butas soon as ε0 becomes positive, S(s, 0, λ0, ε0) becomes smooth in λ0, so that theradial derivative takes on a continuous range of values, as shown in Figure 12. Itis then plausible that for any number p between the “inner” and “outer” valuesof ∂
∂ρS0(s, 0, eiφ), we can find a ρ close to 0 and an ε0 close to zero for which∂∂ρS(s, 0, eρ+iφ, ε0) is close to p; this claim is verified in Proposition 7.4.
We start by recording what happens when ε0 = 0 and λ0 approaches the unitcircle.
Proposition 7.3. Fix a point eiφ in the unit circle where the density of µs ispositive. Then the limits of ∂S0/∂ρ(s, 0, λ0) as λ0 approaches eiφ from inside andoutside the unit circle, respectively, exist and are finite. We denote these limits as
∂S0
∂ρ(s, 0, eiφ)in and
∂S0
∂ρ(s, 0, eiφ)out.
Furthermore the limit of ∂S0/∂θ(s, 0, λ0) as λ0 approaches eiφ from points not inthe unit circle exists. We denote this limit as
∂S0
∂θ(s, 0, eiφ).
We will compute these limits and show that, in general, ∂S0/∂ρ(s, 0, eiφ)in and∂S0/∂ρ(s, 0, eiφ)out are not equal. We now turn to the limiting values of the mo-menta along the curves of the form (7.6).
Proposition 7.4. Fix a point eiφ in the unit circle where the density of µs ispositive. First, we have
limε0→0+
∂S
∂θ(s, 0, (1 + cε0)eiφ, ε0) =
∂S0
∂θ(s, 0, eiφ), (7.7)
independent of c. Second, we have
limε0→0
ε0∂S
∂ε0(s, 0, (1 + cε0)eiφ, ε0) = 0 (7.8)
![Page 45: arXiv:2104.07859v1 [math.PR] 16 Apr 2021](https://reader034.fdocument.org/reader034/viewer/2022042718/62676707814e77464c2343d3/html5/thumbnails/45.jpg)
BROWN MEASURE OF BROWNIAN MOTIONS 45
for all c. Third, we have
limε0→0+
∂S
∂ρ(s, 0, (1 + cε0)eiφ, ε0) =
1
2
(1− c√
1 + c2
)∂S0
∂ρ(s, 0, eiφ)in
+1
2
(1 +
c√1 + c2
)∂S0
∂ρ(s, 0, eiφ)out. (7.9)
Thus, as c varies from −∞ to ∞, the limiting value of ∂S/∂ρ varies continuouslyfrom ∂S0/∂ρ(s, 0, eiφ)in to ∂S0/∂ρ(s, 0, eiφ)out.
It is convenient to related the initial momenta in the preceding propositions tothe Herglotz integral of the measure µs. (Replace µ0 by µs in (3.7).) We will firstuse this idea to verify the statements in Propositions 7.3 and 7.4 about ∂S/∂θ.
Proof of results about ∂S/∂θ. We will try to achieve the equality
∂S
∂θ(s, 0, r0e
iφ, ε0) = Im
[∫S1
eiφ′+ qeiφ
eiφ′ − qeiφdµs(e
iφ′)
], (7.10)
where the left-hand side is computed in terms of the measure µs using (4.3). Aftercomputing both sides, (7.10) becomes∫
S1
2 sin(φ− φ′)(r2
0 + 1 + ε20)/r0 − 2 cos(φ− φ′)
dµs(eiφ′)
=
∫S1
2 sin(φ− φ′)(q + 1/q)− 2 cos(φ− φ′)
dµs(eiφ′), (7.11)
which gives
q +1
q=r20 + 1 + ε2
0
r0. (7.12)
We first consider the case ε0 = 0, which gives q = r0 or q = 1/r0, so that as r0
tends to 1, q also tends to 1. Suppose qeiφ approaches a point on the unit circlewhere the density of µs is positive, from inside the circle. Then since the density isanalytic where it is positive [36, Proposition 3.6], we can rewrite the integral on theright-hand side of (7.10) as a contour integral and deform the contour to see thatthe limit exists. The limit from outside the circle similarly exists and the two limitsare equal because the right-hand side of (7.10), as computed on the right-hand sideof (7.11), is invariant under q 7→ 1/q. This establishes the claim about ∂S0/∂θ inProposition 7.3.
We next consider the case r0 = 1 + cε0, in which case the right-hand side of(7.12) equals 2 + α, where
α =(1 + c2)ε2
0
1 + cε0. (7.13)
The two solutions to (7.12) are reciprocals of one another and the one with q < 1is given by
q = 1 +α
2− 1
2
√α2 + 4α. (7.14)
(Here we assume α > 0, which is always the case if ε0 is small enough.) As ε0 tendsto zero with c fixed, α tends to 0 and q tends to 1. Thus,
limε0→0+
∂S
∂θ(s, 0, (1 + cε0)eiφ, ε0) = lim
q→1−Im
[∫S1
eiφ′+ qeiφ
eiφ′ − qeiφdµs(e
iφ′)
],
![Page 46: arXiv:2104.07859v1 [math.PR] 16 Apr 2021](https://reader034.fdocument.org/reader034/viewer/2022042718/62676707814e77464c2343d3/html5/thumbnails/46.jpg)
46 BRIAN C. HALL AND CHING-WEI HO
which is the same limit as we obtained with ε0 = 0 and r0 approaching 1, verifying(7.7). �
We now turn to ∂S/∂ρ.
Proof of results about ∂S/∂ρ. Since ∂/∂ρ = r∂/∂r, we may compute that
∂S
∂ρ(s, 0, r0e
iφ, ε0) = 1 +r20 − 1− ε2
0
r0
∫S1
1
(r20 + 1 + ε2
0)/r0 − 2 cos(φ− φ′)dµs(e
iφ′).
Meanwhile, we compute that
Re
[∫S1
eiφ′+ qeiφ
eiφ′ − qeiφdµs(e
iφ′)
]= −
(q − 1
q
)∫S1
1
q + 1/q − 2 cos(φ− φ′)dµs(e
iφ′).
(7.15)We therefore find that if q satisfies (7.12), then
∂S
∂ρ(s, 0, r0e
iφ, ε0)
= 1− 1
q − 1/q
r20 − 1− ε2
0
r0Re
[∫S1
eiφ′+ qeiφ
eiφ′ − qeiφdµs(e
iφ′)
]. (7.16)
We start with the case ε0 = 0, in which case we may take q = r0 in (7.12) and(7.16) reduces to
∂S
∂ρ(s, 0, r0e
iφ, 0)
= 1− Re
[∫S1
eiφ′+ r0e
iφ
eiφ′ − r0eiφdµs(e
iφ′)
]. (7.17)
As in the previous proof, if we let r0eiφ approach a point on the unit circle where
the density of µs is positive, the limit from inside the disk exists, giving
∂S0
∂ρ(s, 0, eiφ)in = 1− lim
r0→1−Re
[∫S1
eiφ′+ r0e
iφ
eiφ′ − r0eiφdµs(e
iφ′)
]= 1−ms(φ), (7.18)
where ms is the density of the measure µs with respect to the normalized Lebesguemeasure on S1. (The second equality is obtained by recognizing the right-hand sideof (7.15) as the Poisson integral of µs, evaluated at qeiφ.) The limit from outsidethe disk also exists but is not equal to the limit from inside, because the right-handside of (7.15) changes sign if q is replaced by 1/q, giving
∂S0
∂ρ(s, 0, eiφ)out = 1 + lim
r0→1−Re
[∫S1
eiφ′+ r0e
iφ
eiφ′ − r0eiφdµs(e
iφ′)
]= 1 +ms(φ). (7.19)
Meanwhile, if we take r0 = 1 + cε0 in (7.16) and choose q as in (7.14), we maycompute that
1
q − 1/q
r20 − 1− ε2
0
r0=
ε0 − c(2 + cε0)√(1 + c2)(4 + ε0(ε0 + c(4 + cε0)))
. (7.20)
![Page 47: arXiv:2104.07859v1 [math.PR] 16 Apr 2021](https://reader034.fdocument.org/reader034/viewer/2022042718/62676707814e77464c2343d3/html5/thumbnails/47.jpg)
BROWN MEASURE OF BROWNIAN MOTIONS 47
The right-hand side of this expression tends to −c/√
1 + c2 as ε0 tends to zero.Meanwhile, as ε0 tends to zero, the quantity α in (7.13) also tends to zero, so thatthe quantity q in (7.14) tends to 1 from below. Thus,
limε→0+
∂S
∂ρ(s, 0, (1 + cε0)eiφ, ε0) = 1 +
c√1 + c2
ms(φ). (7.21)
Using this result and (7.18) and (7.19), we can easily check that the left-hand sideof (7.9) agrees with the right-hand side. �
We finally verify (7.8).
Proof. We compute that
∂S
∂ε0(s, 0, r0e
iφ, ε0) = 2ε0
∫S1
1
(r20 + 1 + ε2
0)/r0 − 2 cos(φ− φ′)dµs(e
iφ′),
so that, if q satisfies (7.12), we get
∂S
∂ε0(s, 0, r0e
iφ, ε0) = − ε0
q − 1/qRe
[∫S1
eiφ′+ qeiφ
eiφ′ − qeiφdµs(e
iφ′)
]. (7.22)
After checking that q − 1/q =√α2 + 4α, we can easily check that the leading
coefficient on the right-hand side of (7.22) remains finite as ε0 tends to zero. Thus,after multiplying by ε0, the limit becomes zero. �
Proof of Theorem 7.2. According to Proposition 7.4, the quantity ε0pε,0 tends tozero along the path λ0 = (1 + cε0)eiφ. Meanwhile, we can easily compute from(5.2) that
2λ0pλ,0 − 1 =
(∂S
∂ρ− i∂S
∂θ
)∣∣∣∣τ=0
− 1, (7.23)
where the limiting behavior of ∂S/∂ρ and ∂S/∂θ was worked out in Proposition7.4. We then use the formulas (5.7) and (5.6) for ε(τ) and λ(τ). From (5.7), we seethat in the limit, since ε0 is tending to zero and the initial momenta remain finite,ε(τ) tends to zero. We then apply (5.6), using (7.23) and recalling that ε0pε,0 goesto zero, giving
λ(τ) = λ0 exp{τ
2(2λ0pλ,0 − 1)
}= λ0e
−τ/2 exp
{−i τ
2
∂S
∂θ
∣∣∣∣τ=0
}exp
{τ
2
∂S
∂ρ
∣∣∣∣τ=0
}. (7.24)
According to Proposition 7.4, the limiting value of ∂S/∂θ is independent of thevalue of c, while the value of ∂S/∂ρ varies between ∂S/∂ρin and ∂S/∂ρout.
If we substitute the formulas (7.7) and (7.9) from Proposition 7.4 into (7.24), wesee that
limc→−∞
λ(τ) = λ0 exp{τ
2(2λ0pλ,0 − 1)
}in
= fs−τ (χins (eiφ));
limc→+∞
λ(τ) = λ0 exp{τ
2(2λ0pλ,0 − 1)
}out
= fs−τ (χouts (eiφ)), (7.25)
where χs(eiφ)in and χs(e
iφ)out denote the limiting value of χs(λ0) as λ0 approacheseiφ from inside and outside the unit disk, respectively. These two limiting valuesof λ(τ) then lie on the boundary of Σs,τ and their δ-coordinate is related to φ asin Figures 8 and 9. Meanwhile, a curve of the form zeτx, where z is fixed and x
![Page 48: arXiv:2104.07859v1 [math.PR] 16 Apr 2021](https://reader034.fdocument.org/reader034/viewer/2022042718/62676707814e77464c2343d3/html5/thumbnails/48.jpg)
48 BRIAN C. HALL AND CHING-WEI HO
varies over R, is an exponential spiral along which the δ-coordinate is constant andthe v-coordinate is varying. (Recall the definition (1.7).) Thus, as c varies with φfixed, the value of λ(τ) in (7.24) moves along a segment of an exponential spiralconnecting the two limiting values in (7.25). (See Figure 11.) By [36, Theorem3.8], as φ varies over all points where the density of µs is positive, θ will vary overall angles where rs(θ) < 1, so that (Lemma 3.7), δ will vary over all angles forwhich vs,τ1 (δ) < vs,τ2 (δ). Thus, as φ varies over all points where the density of µs ispositive, the spiral segments will fill up the whole of Σs,τ . �
7.3. Computation of the Brown measure inside the domain. In this sec-tion, we justify the computation of the Brown measure in Σs,τ outlined in Section7.1.2. The computation given there is mostly rigorous, except that we need to showS(s, τ, λ, ε) extends smoothly up to ε = 0.
7.3.1. Regularity of S at ε = 0. In this section, we establish the regularity forS(s, τ, λ, ε) near ε = 0 that is needed to rigorize the computation of the Brownmeasure. We will show that the function
(λ, ε) 7→ S(s, τ, λ, ε),
initially defined for ε > 0, has a C1 extension to a neighborhood of (λ, 0), for any
λ in Σs,τ . (See Theorem 7.6 below.)We consider points (λ0, ε0), where at first we require ε0 > 0. We label such points
using the coordinates
ε0; φ = arg(λ0); c =|λ0| − 1
ε0.
Now, if we let ε0 tend to zero with a fixed value of c, the value |λ0| will approach1 and λ0 itself will approach eiφ. In this limit, λ0 is approaching a single pointeiφ, independent of c—and yet the limiting value of λ(τ), computed in the previoussubsection, does depend on c (Theorem 7.2). It is therefore natural to consider a“blown up” domain in which we consider all non-negative values of ε0 and all realvalues of c. The point here is that even when ε0 = 0, we count points with the samevalue of φ but different values of c as being different.
To establish the desired C1 extension of S, we need to allow the variable ε0 tobe negative. Our blown up domain then consists of triples (ε0, c, φ), where φ isan angle and ε0 and c are real numbers with 1 + cε0 > 0. We may then defineλ0 in terms of (ε0, c, φ) as λ0 = (1 + cε0)eiφ. Note that if ε0 = 0, then λ0 = eiφ;hence, |λ0| must equal 1 when ε0 = 0. The blown up domain can be understoodgeometrically as in Figure 13. The variable c is the slope of a line in the (ε0, |λ0|)plane passing through the point (0, 1) and we decree that we obtain different pointsif we approach (0, 1) along lines lines of different slope.
The first main result of this section is that the map sending λ0 and ε0 to λ(τ) andε(τ), viewed as a map on the blown up domain, has a C1 extension with nonsingularJacobian up to (and a little beyond) ε0 = 0. Once this result is established, we willuse the first Hamilton–Jacobi formula to obtain the desired C1 extension of S.
Theorem 7.5. Fix τ and consider the map
(λ0, ε0) 7→ (λ(τ), ε(τ)),
![Page 49: arXiv:2104.07859v1 [math.PR] 16 Apr 2021](https://reader034.fdocument.org/reader034/viewer/2022042718/62676707814e77464c2343d3/html5/thumbnails/49.jpg)
BROWN MEASURE OF BROWNIAN MOTIONS 49
ε0
λ0
Figure 13. For each φ, points in the (ε0, |λ0|) plane obtained byapproaching (0, 1) along lines with dfferent slope c are consideredto be different
initially defined for λ0 ∈ C and ε0 > 0. We compute using the coordinates (ε0, φ, c)on the domain side and (ε, δ, v) on the range side, giving a map
Ψτ (ε0, φ, c) = (ε, δ, v),
initially defined for ε0 > 0, φ ∈ [−π, π), and c ∈ R. Pick a point φ with ms(φ) > 0and a real number c. Then (1) Ψτ extends to a C1 function defined for (ε0, φ, c)
in a neighborhood of (0, φ, c) inside R3, and (2) the Jacobian of Ψτ at (0, φ, c) isinvertible.
We separate the proof into two parts, the proof of smoothness and the compu-tation of the Jacobian.
Proof (smoothness). The formulas for λ(τ) and ε(τ) in (5.6) and (5.7) are smoothfunctions of λ0, ε0, and the quantities ε0pε,0 and λ0pλ,0. Since λ0 = (1 + cε0)eiφ
is a smooth function of (ε0, φ, c), it suffices to verify that ε0pε,0 and λ0pλ,0 areC1 functions of (ε0, φ, c). In light of (7.23), it then suffices to verify smoothnessof ε0pε,0, ∂S(s, 0, λ0, ε0)/∂ρ, and ∂S(s, 0, λ0, 0)/∂θ as functions of ε0, φ, and c.To obtain the desired smoothness, we use the expressions (7.22), (7.16) (togetherwith (7.20)), and (7.10). We then use the previously noted “deform the contour”argument to show that all these expressions extend smoothly as functions of q pastq = 1. Finally, we can easily check that q itself, as given in (7.12), extends smoothlypast ε0 = 0. �
Proof (Jacobian). From (5.6) and (5.7), we have
ε = ε0|λ||λ0|
= ε0|λ|
1 + cε0. (7.26)
Since we have shown that |λ| is a smooth function of (ε0, φ, c), the leading factorof ε0 in (7.26) easily gives that
∂ε
∂ε0
∣∣∣∣ε0=0
= |λ| ; ∂ε
∂φ
∣∣∣∣ε0=0
=∂ε
∂c
∣∣∣∣ε0=0
= 0.
![Page 50: arXiv:2104.07859v1 [math.PR] 16 Apr 2021](https://reader034.fdocument.org/reader034/viewer/2022042718/62676707814e77464c2343d3/html5/thumbnails/50.jpg)
50 BRIAN C. HALL AND CHING-WEI HO
Let us now evaluate λ(τ) at ε0 = 0—that is, using fixed values of c and φ andletting ε0 tend to zero as in Proposition 7.4. Using (7.21), we obtain
λ(τ)|ε0=0 = λ0 exp{τ
2(2λ0pλ,0 − 1)in
}exp
{τ
2
(1 +
c√1 + c2
)ms(φ)
},
where ms is the density of φs, or, by Proposition 5.6,
λ(τ) = fs−τ (χs(λ0))in exp
{τ
2
(1 +
c√1 + c2
)ms(φ)
}. (7.27)
Here the superscript “in” means that we evaluate the relevant quantity with ε0 = 0in the limit as λ0 approaches eiφ from inside the unit circle.
We see, then, that the factor of fs−τ (χs(λ0))in depends only on φ and not onc. Furthermore, because the final exponential factor in (7.27) has the form eaτ forsome real number a, this factor only affects the value of v and not the value of δ.Thus, the value of δ comes from fs−τ (χs(λ0))in, which does does not depend on c,and we see that ∂δ/∂c = 0 and we find, using (7.26) that the Jacobian at ε0 = 0has the form |λ| 0 0
∗ ∂δ∂φ 0
∗ ∗ ∂v∂c
.
Now, since the value of δ comes from fs−τ (χs(λ0))in, we see that δ depends on φas in Figures 8 and 9. Thus, by Proposition 3.5 and the estimate [23, Lemma 4.20]for dφ/dθ, we see that ∂δ/∂φ is positive. Furthermore, ∂v/∂c is easily computed(from the final exponential factor in (7.27)) to be positive, provided we evaluate at
φ = φ, with ms(φ) > 0. Finally, we recall that the point λ = 0 is never in Σs,τ andwe can see that the determinant of the Jacobian is positive. �
Theorem 7.6. Pick a point λ ∈ Σs,τ . Then the map
(λ, ε) 7→ S(s, τ, λ, ε),
initially defined for ε > 0, has a C1 extension defined for (λ, ε) in a neighborhood
of (λ, 0).
We emphasize that for ε < 0, the C1 extension of S(s, τ, λ, ε) is not given bythe formula (4.1). Indeed, since ε(τ)pε(τ) is independent of τ (from the formulas(5.7) and (5.9)), we can compute pε(τ) as pε,0ε0/ε(τ). If λ0 = (1 + cε0)eiφ, withms(φ) > 0, then as ε0 tends to zero, both pε,0 and ε0/ε(τ) tend to nonzero limits.(For pε,0, use (7.22) and for ε0/ε(τ), use (5.7).) Using the second Hamilton–Jacobiformula (5.12), we find that ∂S/∂ε evaluated at ε = 0 is nonzero, so that a C1
extension of S cannot be an even function of ε. To put it differently, if we diddefine S by the same formula (4.1) even for ε < 0, then S would not be C1 butwould have a singularity of absolute-value type as a function of ε near ε = 0.
Corollary 7.7. Consider the function S0 given by S0(s, τ, λ) = limε→0+ S(s, τ, λ, ε).Then for τ satisfying |τ − s| < s and λ in Σs,τ , the function S0 satisfies the PDEobtained by formally setting ε = 0 in (4.2), namely
∂S0
∂τ= −1
2
(λ2
(∂S0
∂λ
)2
− λ∂S0
∂λ
). (7.28)
![Page 51: arXiv:2104.07859v1 [math.PR] 16 Apr 2021](https://reader034.fdocument.org/reader034/viewer/2022042718/62676707814e77464c2343d3/html5/thumbnails/51.jpg)
BROWN MEASURE OF BROWNIAN MOTIONS 51
Furthermore, suppose we define curves λ(τ) and pλ(τ) by taking the curves in (5.6)and (5.8) with λ0 = (1 + cε0)eiφ as in (7.6) and letting ε0 tend to zero. Then S0
satisfies the first Hamilton–Jacobi formula
S0(s, τ, λ(τ)) = S0(s, 0, λ0) + 2 Re[τH0] + Re [τλ0pλ,0] (7.29)
and the second Hamilton–Jacobi formula
∂S0
∂λ(s, τ, λ(τ)) = pλ(τ), (7.30)
where H0 is the value of the Hamiltonian H in (5.1) with εpε = 0 and λpλ replacedby λ0pλ,0.
Proof. Theorem 7.6 justifies formally setting ε = 0 in the PDE. Using Theorem 7.6again along with Proposition 7.4 allow us to let ε0 tend to zero in the Hamilton–Jacobi formulas (5.10), (5.11), and (5.12). �
Proof of Theorem 7.6. We define a function HJ(s, τ, λ0, ε0) by the right-hand sideof the first Hamilton–Jacobi formula, namely
HJ(s, τ, λ0, ε0) = S(s, 0, λ0, ε0) + 2 Re[τH0] +1
2Re [τ(ε0pε,0 + 2λ0pλ,0)]
where it is understood that the initial momenta pε,0 and pλ,0 are always computedas functions of λ0 and ε0 as in (5.4) and (5.5). We express (λ0, ε0) in terms of thecoordinates (ε0, c, φ) and work in the blown up domain. Then the proof of Theorem7.5 shows that ε0pε,0 and λ0pλ,0 extend to C1 functions of these variables defined
near (0, c, φ). A similar argument shows that S(s, 0, λ0, ε0), which is the regularizedlog potential of the measure µs, also has a C1 extension.
We now appeal to Theorem 7.5 and the inverse function theorem to constructan inverse to the map Ψτ near (0, δ, v). Since the extended map Ψτ uses the sameformula (5.7) for ε(τ), but with C1 extensions of the momenta, we see that the signof ε is always the same as the sign of ε0. Thus, the ε0-component of Ψ−1
τ (ε, δ, v) ispositive when ε is positive. We then consider
S(s, τ, λ, ε) = HJ(s, τ,Ψ−1τ (ε, δ, v)),
which is a C1 function. The first Hamilton–Jacobi formula tells us that S agreeswith S when ε > 0. Thus, S is the desired extension. �
7.3.2. The Brown measure. We now rigorize the argument outlined in Section 7.1.2.
Proof of Conclusion 7.1. Choose an arbitrary point λ in Σs,τ . By Theorem 7.2, wecan find φ and c so that if λ0 = (1 + cε0)eiφ, then as ε0 tends to zero, ε(τ) tends tozero and λ(τ) tends to λ. As shown in the proof of Theorem 7.2, the δ-coordinate ofλ is then related to φ as in Figures 8 and 9. Thus, as in Section 7.1.2, the limitingvalue of arg λ0 is φs,τ (δ).
We then apply the second Hamilton–Jacobi formula (5.11) with this choice ofλ0, where we initially require ε0 > 0. After multiplying by λ, we have
λ∂S
∂λ(s, τ, λ(τ), ε(τ)) = λ(τ)pλ(τ) = λ0pλ,0, (7.31)
where the second equality follows from the formulas (5.6) and (5.8) for λ(τ) andpλ(τ). Theorem 7.6 allows us to let ε0 tend to zero on the left-hand side of (7.31)to obtain ∂
∂λS0(s, τ, λ). Meanwhile, Proposition 7.4 tells us that as ε0 tends to zero,λ0pλ,0 approaches some finite number, which we continue to call λ0pλ,0, and we
![Page 52: arXiv:2104.07859v1 [math.PR] 16 Apr 2021](https://reader034.fdocument.org/reader034/viewer/2022042718/62676707814e77464c2343d3/html5/thumbnails/52.jpg)
52 BRIAN C. HALL AND CHING-WEI HO
obtain the claimed formula (7.2). The computation of ∂S0/∂v and ∂S0/∂δ thenproceeds as in Section 7.1.2, leading to the formulas (7.4) and (7.5) for ∂S0/∂v and∂S0/∂δ.
From these formulas, we can see that the partial derivatives of S0(s, τ, λ) arethemselves continuously differentiable. We may therefore compute the Laplacianof S0(s, τ, λ) in the pointwise sense, and the rest of the derivation in Section 7.1.2may be applied without change. �
We have already shown (Theorem 6.1) that the Brown measure µs,τ is zerooutside the closure of Σs,τ and we have computed µs,τ on the open set Σs,τ . Itremains only to show that µs,τ does not give mass to the boundary of Σs,τ .
Theorem 7.8. The Brown measure µs,τ assigns measure 1 to the open set Σs,τ .Thus, µs,τ has no mass on the boundary of Σs,τ .
Intuitively, the mass of the boundary should be zero if the limiting values ofS0(s, τ, λ) and its first derivatives are the same when approaching ∂Σs,τ from inside
Σs,τ as when approaching ∂Σs,τ from outside Σs,τ . And, indeed, these limitingvalues are the same. This claim can be verified by using the first and secondHamilton–Jacobi formulas (5.10), (5.11), and (5.12) and checking that λ0 and pλ,0can be computed as continuous functions of λ over all of C, even when λ is in theboundary of Σs,τ . (Check that the “inside” values of λ0 and pλ,0 in Section 7.2agree with the “outside” values of λ0 and pλ,0 in Section 6 when λ approaches apoint on the boundary of Σs,τ .)
If we then integrate S0(s, τ, λ) against ∆χ(λ) for some test function λ, we maysplit the integral into integrals over Σs,τ and its complement. We may then hope tointegrate by parts using Green’s second identity. Since S0 and its first derivatives arecontinuous up to the boundary, the boundary terms from inside and from outsideshould cancel, giving the integral of (∆S0)χ over Σs,τ and the integral of (∆S0)χover Σcs,τ . Since the “outside” integral is zero by Theorem 6.1, we would be left withthe integral of (∆S0)χ over Σs,τ , showing that the Brown measure is supported onΣs,τ . This argument is carried out the case τ = s and µ0 = δ1 in [13, Proposition7.13].
The difficulty with carrying this argument out in general is that we would have tojustify the use of Green’s second identity, using, say, Federer’s theorem [28, Section12.2]. But to use Federer’s theorem, we would need to know that the boundaryΣs,τ is a rectifiable curve, which we do not know if µ0 is a completely arbitraryprobability measure on the unit circle. (By contrast, if µ0 = δ1, as in [13], then theboundary of Σs,τ is smooth, except possibly at a single point.)
We will therefore use an indirect approach, similar to the one developed in [23,Lemma 4.25] and used also in [20, Theorem 7.9]. In [23, Proposition 4.31], it isshown that when τ = s, the Brown measure µs,s gives mass one to the domainΣs,s = Σs. In Section 8, we will use a pushforward result to prove that µs,τ assignsmass 1 to Σs,τ , for all nonzero τ with |τ − s| ≤ s. See Section 8.5 for the details ofthis argument.
8. Relating different values of τ
The goal of this section is to prove Theorem 1.1, which states that the Brownmeasure µs,τ is the push-forward of µs,s under a certain map Φs,τ : Σs → Σs,τ .
![Page 53: arXiv:2104.07859v1 [math.PR] 16 Apr 2021](https://reader034.fdocument.org/reader034/viewer/2022042718/62676707814e77464c2343d3/html5/thumbnails/53.jpg)
BROWN MEASURE OF BROWNIAN MOTIONS 53
(λ0,pθ,0,pρ,0)
λ(s)λ(τ)
Φs,τ
Figure 14. To compute Φs,τ (λ), we choose initial conditions(λ0, pθ,0, pρ,0) so that λ(s) = λ and then set Φs,τ (λ) equal to λ(τ),computed with the same initial conditions
Recall the notation
S0(s, τ, λ) = limε→0+
S(s, τ, λ, ε),
so that the Brown measure µs,τ is the distributional Laplacian of S0(s, τ, λ) withrespect to λ.
8.1. The maps. Throughout this section, we assume that µ0 (the law of the uni-tary element u in the expression ubs,τ ) is fixed. Recall the “characteristic curves”λ(τ) defined in (5.6). We will define the map Φs,τ in terms of these curves and thencompute the map more explicitly in Proposition 8.3.
Definition 8.1. Fix a positive real number s and a nonzero complex number τ suchthat |τ − s| ≤ s. For each λ ∈ Σs, define λ0 in the unit circle by
λ0 = exp {iφs(θ)} ,
where θ = arg λ and φs is as in Definition 3.2. Let pθ,0 = ∂S0/∂θ(0, λ0, 0) becomputed from λ0 as in Proposition 7.3. By Theorem 7.2, we can choose pρ,0between ∂S0/∂ρ
in and ∂S0/∂ρout so that with initial conditions (λ0, pθ,0, pρ,0)—and
with ε0pε,0 = 0—we have
λ(s) = λ. (8.1)
Then define a map Φs,τ : Σs → Σs,τ by setting
Φs,τ (λ) = λ(τ),
where λ(τ) is computed using the same initial conditions (λ0, pθ,0, pρ,0) (withε0pε,0 = 0) that give (8.1).
See Figure 14. The following is the main result about the maps Φs,τ .
Theorem 8.2. Fix a positive real number s and a nonzero complex number τsuch that |τ − s| ≤ s. Then Φs,τ is a homeomorphism of Σs onto Σs,τ and a
![Page 54: arXiv:2104.07859v1 [math.PR] 16 Apr 2021](https://reader034.fdocument.org/reader034/viewer/2022042718/62676707814e77464c2343d3/html5/thumbnails/54.jpg)
54 BRIAN C. HALL AND CHING-WEI HO
diffeomorphism of Σs onto Σs,τ . Furthermore, the Brown measure µs,τ is the push-forward of the Brown measure µs,s under the map Φs,τ .
Note that we have already established (Theorem 6.1) that the Brown measureµs,s is zero outside Σs = Σs,s. It is therefore meaningful to speak of pushing forward
µs,s by a map that is only defined on Σs. The homeomorphism and diffeomorphismproperties of Φs,τ are established in Proposition 8.3 in this section. The proof ofthe push-forward property is given in Section 8.4.
In [13, Proposition 2.5] and [23, Corollary 4.30], a map Φs from Σs into the unitcircle is constructed with the property that the pushforward of the Brown measureµs,s is the measure µs, the law of uus, where us is the free unitary Brownian motionand u is the unitary element in the expression ubs,τ , taken to be freely independentof us. Now, uus is just the limit in ∗-distribution of ubs,τ as τ tends to zero (see(2.7) and Appendix B), and we will show in Proposition 8.3 that Φs is the the limitof Φs,τ as τ tends to zero. Theorem 8.2 thus shows that the relationship betweenµs,s and µs in [13, 23] is a limiting case of a whole family of relationships amongthe measures µs,τ with s fixed and τ varying.
Of course, it follows from Theorem 8.2 that the push-forward of µs,τ1 under themap Φs,τ2 ◦ Φ−1
s,τ1 is µs,τ2 , for any two nonzero complex numbers τ1 and τ2 with|τ1 − s| ≤ s and |τ2 − s| ≤ s.
We now compute the map Φs,τ more explicitly.
Proposition 8.3. Fix a positive number s and a nonzero complex number τ satis-fying |τ − s| ≤ s. Then for all λ = reiθ in Σs, we may compute Φs,τ (λ) as
Φs,τ (reiθ) =
(r
rs(θ)
)τ/sfs−τ (rs(θ)e
iθ). (8.2)
In particular, Φs,τ agrees with fs−τ on the boundary of Σs and maps each radialsegment to a portion of an exponential spiral (a curve of the form u 7→ ceuτ forsome c ∈ C) in Σs,τ . From these formulas, we can verify that Φs,τ homeomorphism
of Σs onto Σs,τ and a diffeomorphism of Σs onto Σs,τ . Furthermore, we have
limτ→0
Φs,τ (λ) = Φs(λ), (8.3)
where, as in [13, 23], Φs : Σs → S1 is given by
Φs(reiθ) = fs(rs(θ)e
iθ). (8.4)
See Figure 4. We note that Φs,τ (λ) depends holomorphically on τ with λ and sfixed; this property of Φs,τ will be used in Section 8.3. On the other hand, Φs,τ (λ)does not depend holomorphically on λ with s and τ fixed.
Proof. Suppose we take ε0pε,0 = 0, fix a point λ0 = eiφ in the support of µs inthe unit circle, and take pθ,0 as in Proposition 7.3. Then the proof of Theorem7.2 shows that as pρ,0 varies between ∂S/∂ρin and ∂S/∂ρout, the point λ(s) willrange over a radial segment inside Σs connecting the inner and outer boundaries.Similarly, λ(τ) will range over a spiral segment in Σs,τ connecting two boundarypoints with the same value of δ. Thus, Φs,τ maps the radial segment in Σs to thespiral segment in Σs,τ .
We then check that the formula in (8.2) captures this behavior. We can verifythat the right-hand side of (8.2) agrees with fs−τ (reiθ) both on the inner boundaryat r = rs(θ) (trivially) and on the outer boundary at r = rs(θ)
−1 (using Lemma
![Page 55: arXiv:2104.07859v1 [math.PR] 16 Apr 2021](https://reader034.fdocument.org/reader034/viewer/2022042718/62676707814e77464c2343d3/html5/thumbnails/55.jpg)
BROWN MEASURE OF BROWNIAN MOTIONS 55
3.7). It follows that the endpoints of the radial segment map to the endpoints ofthe spiral segment. Since as r varies, the right-hand side of (8.2) traces out anexponential spiral with a constant value of δ, (8.2) agrees with the map in theprevious paragraph.
That Φs,τ is a homeomorphism of Σs onto Σs,τ follows from the bijective natureof the correspondence between θ and δ (Point 1 of Theorem 3.3), together withLemma 3.7, which tells us that a radial segment in Σs cannot collapse to a singlepoint in Σs,τ . That Φs,τ is a diffeomorphism on Σs follows by using polar coordinates(r, θ) in Σs and twisted logarithmic coordinates (v, δ) in Σs,τ . Then δ depends onlyon θ and Proposition 3.5, dδ/dθ > 0. Furthermore, ∂v/∂r > 0 from the explicitformula in (8.2). Thus, the Jacobian of Φs,τ in these coordinates is upper triangularwith positive entries on the diagonal.
Finally, the expression on the right-hand side of (8.2) is continuous up to τ = 0and
limτ→0
Φs,τ (reiθ) = fs(rs(θ)eiθ),
as claimed in (8.3) and (8.4). �
We now begin working toward the proof of Theorem 8.2. In Section 8.2, we willcompute how the Brown measure µs,τ varies as τ varies. Then in Section 8.3, wewill compute how the push-forward of µs,s by Φs,τ varies as τ varies. The proof(Section 8.4) will be based on a similarity between these two computations. Theproof does not rely on the formula for the Brown measure obtained in Section 7 butinstead uses only that the log potential of the Brown measure satisfies the ε = 0PDE in Corollary 7.7.
8.2. The derivative of the density of the Brown measure. We let W (s, τ, λ)denote the density (in Σs,τ ) of the Brown measure µs,τ . We begin by computinghow W (s, τ, λ) varies as τ varies with s fixed. Recall that S0(s, τ, λ) is the limitof S(s, τ, λ, ε) as ε tends to zero from above and that the density W of the Brownmeasure is 1
4π times the Laplacian of S0 with respect to λ.
Theorem 8.4. For all s > 0, the function W satisfies the equation
∂W
∂τ= − ∂
∂λ
[λ
(λ∂S0
∂λ− 1
2
)W
](8.5)
for all τ with |τ − s| < s and all λ in Σs,τ .
Note that (8.5) is not a self-contained PDE for W, since the right-hand sideinvolves S0 as well as W.
Proof. According to Corollary 7.7, S0 satisfies the ε = 0 version of the PDE (4.2)inside Σs,τ , as given in (7.28). We now apply the operator
1
4π∆λ =
1
π
∂2
∂λ∂λ
to both sides of (7.28), leaving the λ-derivative on the right-hand side unevaluated.This gives
1
π
∂2
∂λ∂λ
∂S0
∂τ= −1
2
1
π
∂
∂λ
(2λ2 ∂S0
∂λ
∂2S0
∂λ∂λ− λ ∂
2S0
∂λ∂λ
). (8.6)
After interchanging the τ -derivative with the λ- and λ-derivatives on the left-handside of (8.6), we get the claimed result. �
![Page 56: arXiv:2104.07859v1 [math.PR] 16 Apr 2021](https://reader034.fdocument.org/reader034/viewer/2022042718/62676707814e77464c2343d3/html5/thumbnails/56.jpg)
56 BRIAN C. HALL AND CHING-WEI HO
8.3. Pushing forward the Brown measure from τ = s. It is shown in Lemma4.25 and Theorem 4.28 of [23] that the Brown measure µs,s has full mass on theopen set Σs. (This statement is stronger than what we have proved in Theorem6.1, which tells us only that µs,s has full mass on Σs.) In this section, we startwith the Brown measure µs,s on Σs and push it forward to each domain of theform Σs,τ , with τ 6= 0 and |τ − s| ≤ s. We then compute how the density of thepushed-forward measure varies with τ. Thus, we define
µs,τ = push-forward of µs,s by Φs,τ
and we let W (s, τ, λ) denote the density (in Σs,τ ) of µs,τ .
Theorem 8.5. For each fixed s > 0, the function W satisfies the same equation asthe function W in Theorem 8.4, namely
∂W
∂τ= − ∂
∂λ
[λ
(λ∂S0
∂λ− 1
2
)W
],
for all τ with |τ − s| < s.
We begin by computing ∂W/∂τ in a general way. The following result doesnot rely on the specific form of the map Φs,τ but only on one crucial property ofit—that Φs,τ (λ) depends holomorphically on τ with λ fixed.
Proposition 8.6. For each fixed s > 0, and all τ with |τ − s| < s, we have
∂W
∂τ= − ∂
∂λ
[QW
],
where
Q(s, τ, λ) =∂
∂τ ′Φs,τ ′(Φ
−1s,τ (λ))
∣∣∣∣τ ′=τ
. (8.7)
Before proving the proposition, we establish a useful lemma.
Lemma 8.7. Suppose fr is a family of diffeomorphisms such that fr and f−1r
depend smoothly on r, α is a fixed differential form, and we define βr as the pull-back of α by f−1
r . Thendβrdr
= −LXrβr, (8.8)
where Xr is the vector field given by
Xr(m) =d
dr′fr′(f
−1r (m))
∣∣∣∣r′=r
.
Proof. We write α locally as α = g dx1 ∧ · · · ∧ dxn, so that
βr = (g ◦ f−1r )d[x1 ◦ f−1
r ] ∧ · · · ∧ d[xn ◦ f−1r ],
from which an elementary calculation shows
dβrdr
= Yr(g ◦ f−1r )d[x1 ◦ f−1
r ] ∧ · · · ∧ d[xn ◦ f−1r ]
+∑j
(g ◦ f−1r )d[x1 ◦ f−1
r ] ∧ · · · ∧ d[Yr(xj ◦ f−1r )] ∧ · · · ∧ d[xn ◦ f−1
r ]
= LYrβr,
![Page 57: arXiv:2104.07859v1 [math.PR] 16 Apr 2021](https://reader034.fdocument.org/reader034/viewer/2022042718/62676707814e77464c2343d3/html5/thumbnails/57.jpg)
BROWN MEASURE OF BROWNIAN MOTIONS 57
where
Yr(m) = (fr)∗
(d
drf−1r (m)
).
We then differentiate the identity fr(f−1r (m)) = m with respect to r to show that
Yr = −Xr. �
Proof of Proposition 8.6. It will be convenient to use the symbol “vect” to converta complex number to a vector in the plane; that is,
vect(α+ iβ) = (α, β). (8.9)
Consider a curve of the form
τ(r) = τ + rτ ′ (8.10)
and define a vector field Vr by
Vr(λ) = vect
(d
dr′Φs,τ(r′)(Φ
−1s,τ(r)(λ))
∣∣∣∣r′=r
). (8.11)
Since Φs,τ (λ) depends holomorphically on τ with λ fixed, we may compute
d
dr′Φs,τ(r′)(Φ
−1s,τ(r)(λ))
∣∣∣∣r′=r
=∂Φs,τ∂τ
(Φ−1s,τ(r)(λ))
dτ
dr
= τ ′∂Φs,τ∂τ
(Φ−1s,τ(r)(λ))
∣∣∣∣τ=τ(r)
. (8.12)
Now, since W (s, τ(r), ·) is the density of the push-forward of µs,s by Φs,τ(r), the
associated differential form W (s, τ(r), λ) dx∧dy is the pull-back of W (s, s, λ) dx∧dyby the inverse map Φ−1
s,τ(r). By Lemma 8.7, we obtain
d
drW (s, τ(r), λ) dx ∧ dy = −LVr [W (s, τ(r), λ) dx ∧ dy].
We now compute LVr using Cartan’s formula, one term of which is zero because
W dx ∧ dy is a top-degree form. Now, using (8.12), we find that the vector fieldVr in (8.11) is equal to vect(τ ′Q(s, τ(r), λ)), where Q is as in (8.7). We may theneasily compute that
LVr [W dx ∧ dy] = τ ′∂
∂λ(QW ) + τ ′
∂
∂λ(QW ).
We now argue as in the proof of Theorem 4.2. Recalling that τ(r) = τ + rτ ′, wefind that
∂
∂rW (s, τ(r), λ)
∣∣∣∣r=0
=∂W
∂τ(s, τ, λ)τ ′ +
∂W
∂τ(s, τ, λ)τ ′.
Thus,
∂W
∂τ(s, τ, λ) =
∂
∂τ ′
(∂
∂rW (s, τ(r), λ)
∣∣∣∣r=0
)= − ∂
∂λ(Q(s, τ(r), λ)W )
∣∣∣∣r=0
,
as claimed. �
To prove Theorem 8.5, we simply need to compute the function Q in Proposition8.6.
![Page 58: arXiv:2104.07859v1 [math.PR] 16 Apr 2021](https://reader034.fdocument.org/reader034/viewer/2022042718/62676707814e77464c2343d3/html5/thumbnails/58.jpg)
58 BRIAN C. HALL AND CHING-WEI HO
Proof of Theorem 8.5. To compute Φ−1s,τ (λ), we choose our initial conditions so that
λ(τ) = λ, and then Φ−1s,τ (λ) is equal to λ(s). Then to compute Φs,τ ′(Φ
−1s,τ (λ)), we
continue to use the same initial conditions—since they give λ(s) = Φ−1s,τ (λ)—and
then Φs,τ ′(Φ−1s,τ (λ)) is equal to λ(τ ′). Thus, the values Φs,τ ′(Φ
−1s,τ (λ)) have the form
λ(τ ′), where all curves are computed using a fixed set of initial conditions. We thendifferentiate the formula (5.6) for λ(τ) with ε0pε,0 = 0, and find that
dλ(τ)
dτ= λ(τ)
(λ0pλ,0 −
1
2
).
Since λ(τ)pλ(τ) is independent of τ (from the formulas (5.6) and (5.7)) and usingthe second Hamilton–Jacobi formula (7.30) for S0, we get
dλ(τ)
dτ= λ(τ)
(λ(τ)
∂S0
∂z(s, τ, λ(τ))− 1
2
). (8.13)
Thus,
Q(s, τ, λ) = λ
(λ∂S0
∂z(s, τ, λ)− 1
2
)and Theorem 8.5 follows from Proposition 8.6. �
8.4. Proof of the push-forward property. We now prove our main push-forwardresult, Theorem 8.2. The proof is based on the fact that W (the density of the mea-
sure µs,τ ) and W (the density of the push-forward of µs,s by Φs,τ ) satisfy the samePDE with the same initial condition at r = 0. (In both equations, recorded in The-
orems 8.4 and 8.5, we regard S0 as a known quantity and try to solve for W or W .)The agreement between the PDE’s, in turn, relies on an agreement between theexpression for dλ/dτ in (8.13) and the coefficient of W inside the square bracketson the right-hand side of (8.5).
Now, the quantity in square brackets in (8.5), comes from applying 1π∂/∂λ to
the right-hand side of the PDE (7.28), while the formula for ∂λ/∂τ comes from theHamilton–Jacobi analysis of the same PDE. While we will refrain from stating aprecise result, one could develop a general theory whenever a real-valued functionS0 satisfies a PDE of the form
∂S0
∂τ= F
(λ,∂S0
∂λ
),
where F is a holomorphic of two complex variables.
Proof of Theorem 8.2. We will prove that the function W in Section 8.2 and thefunction W in Section 8.3 are equal, showing that the push-forward of µs,s by Φs,τagrees with µs,τ(r) on the open set Σs,τ(r). Then since the set Σs has measure 1with respect to µs,s [23, Lemma 4.25 and Theorem 4.28], the set Σs,τ(r) must havemeasure 1 with respect to µs,τ(r). Thus, the push-forward of µs,s by Φs,τ is actuallyequal to µs,τ .
We treat the function S0 as a known quantity, and note that this function occursboth in the PDE for W (Theorem 8.4) and in the identical PDE for W (Theorem
8.5). We can then solve this PDE for W (or W ) by differentiating along thecharacteristic curves λ(τ). We compute that
∂
∂τW (s, τ, λ(τ)) =
∂W
∂τ(s, τ, λ(τ)) +
∂W
∂λ(s, τ, λ(τ))
∂λ
∂τ.
![Page 59: arXiv:2104.07859v1 [math.PR] 16 Apr 2021](https://reader034.fdocument.org/reader034/viewer/2022042718/62676707814e77464c2343d3/html5/thumbnails/59.jpg)
BROWN MEASURE OF BROWNIAN MOTIONS 59
Then using the PDE (8.5) and the formula (8.13) for ∂λ/∂τ, we obtain, after notinga cancellation and dividing both sides by W :
∂
∂τlogW (s, τ, λ(τ)) = − ∂
∂λ
[λ
(λ∂S0
∂λ− 1
2
)].
We now consider a nonzero τ with |τ − s| ≤ s and consider the curve τ(r) =s + r(τ − s), which is simply the curve in (8.10) with τ = s and τ ′ = (τ − s). Wethen wish to show that
W (s, τ(r), λ) = W (s, τ(r), λ) (8.14)
for all 0 ≤ r ≤ 1, where equality at r = 1 shows that W = W . We then computethat for 0 ≤ r < 1, we have
d
drlogW (s, τ(r), λ(τ(r))) =
∂
∂τlogW (s, τ(r), λ(τ(r)))
dτ
dr
+∂
∂τlogW (s, τ(r), λ(τ(r)))
dτ
dr= −2 Re [(τ − s)Hr(λ(τ(r)))] (8.15)
where
Hr(λ) = − ∂
∂λ
[λ
(λ∂S0
∂λ(τ(r), λ)− 1
2
)].
Of course, W satisfies the same equation with W changed to W everywhere. Weimpose the restriction r < 1 because in the borderline case |τ − s| = s, the PDE’s
for W and W are not known to hold at τ.At r = 0, both functions equal the density of the Brown measure µs,s. We may
then integrate in (8.15) to obtain
logW (s, τ, λ(τ(r))) = log W (s, τ, λ(τ(r)))
= logW (s, s, 0)− 2
∫ r
0
Re [(τ − s)Hr′(λ(τ(r′)))] dr′,
for r < 1. We now wish to let r tend to 1. This is only a problem if |τ − s| = s. (If
|τ − s| < s, the PDE’s for W and W are applicable even a little beyond r = 1.) Aslong as τ 6= 0, all the estimates in Section 3.3 concerning the boundary behaviorof fs−τ remain applicable even when |τ − s| = s, from which good behavior of the
map Φs,τ follows. Thus, we can see that W (s, τ, λ(τ(r))) is continuous up to r = 1.The analysis in Section 7.3.1 of S at ε = 0 is similarly applicable for τ 6= 0 and|τ − s| = s, from which we can see that W (s, τ, λ(τ(r))) is continuous up to r = 1.
Thus, (8.14) holds at r = 1, showing that W = W . �
8.5. The proof of Theorem 7.8. The theorem in question says that the Brownmeasure µs,τ gives full mass to the open set Σs,τ . This is a strengthening of Theorem
6.1, which says that µs,τ gives full mass to the closed set Σs,τ . As discussed after thestatement of Theorem 7.8 in Section 7.3.2, if the boundary of Σs,τ is a rectifiablecurve, Theorem 7.8 follows from the agreement between the first derivatives of S0
as we approach the boundary from inside and from outside the domain—but we donot know that rectifiability of the boundary holds in general.
We actually have already proved Theorem 7.8 in general as part of the proofof Theorem 8.2 in the previous subsection. The proof relies on a result of Ho and
![Page 60: arXiv:2104.07859v1 [math.PR] 16 Apr 2021](https://reader034.fdocument.org/reader034/viewer/2022042718/62676707814e77464c2343d3/html5/thumbnails/60.jpg)
60 BRIAN C. HALL AND CHING-WEI HO
Zhong [23, Lemma 4.25 and Theorem 4.28], that the Brown measure of µs,s has fullmass on Σs. Then the push-forward result on the open domains then tells us that
µs,τ (Σs,τ ) = µs,s(Φ−1s,τ (Σs,τ )) = µs,s(Σs) = 1.
Now, the proof of the just-cited result of Ho and Zhong also relies on a push-forward result. Recall that µs denotes the law of the unitary element uus, which isknown [36, Proposition 3.6] to have a continuous density with respect to Lebesguemeasure on the unit circle. The push-forward result of Ho and Zhong (implicit intheir Lemma 4.25 and stated explicitly in Proposition 4.31) asserts that the push-forward of the restriction of µs,s to Σs coincides with the restriction of µs to acertain open set Vs in the unit circle. By Theorems 2.11 and 4.10 in [23], the setVs is precisely the set where the density of µs is positive, so that µs(Vs) equals 1.It then follows that µs,s(Σs) equals 1 as well.
Intuitively, the push-forward result in [23] can be understood as the τ → 0 limitof Theorem 8.2 in the present paper, but their result does not actually follow fromour result, without additional effort.
Appendix A. A factorization of bs,τ
In this section, we establish the factorization result in Theorem 4.3 for elementsof the form bs,τ (Notation 2.1). This result is used in the derivation of the PDE forS in Section 4.
One could prove similar result in the finite-N setting of [12], replacing, say, bs,τ (r)by the corresponding Brownian motion in GL(N ;C). According to the equationbetween Eq. (1.13) and Eq. (1.14) in [12], the generator of the (s, τ)-Brownianmotion in GL(N ;C) is the operator s∆−τ∂2− τ ∂2, where ∆, ∂2, and ∂2 are certainleft-invariant differential operators on GL(N ;C). In this setting, the factorizationresult holds because all three of these operators commute with one another [12,Corollary 5.7].
One obvious strategy for trying to prove Theorem 4.3 in the free setting is to tryto prove that bs,τ (r)b′s′,τ ′(r) and bs+s′,τ+τ ′(r) have the same ∗-distribution for all r.We may then try to show that both sets of ∗-moments satisfy the same differentialequation with respect to r, with the same trivial initial condition at r = 0. Thisapproach does not, however, work in general. Actually, we will implement preciselythis strategy in Section A.1 in the special case where τ ′ = 0. In the τ ′ = 0 case, weget bs′,0(r) = urs′ , where u· is the free unitary Brownian motion, and the unitarityof urs′ is used in an essential way in the analysis. (See, specifically, the derivationof (A.9) in the proof of Proposition A.1.)
To show that the ∗-moments of bs,τ b′s′,τ ′ and bs+s′,τ+τ ′ are the same, we follow a
three-step process. In Step 1, we will prove this result (as we have just discussed) inthe case τ ′ = 0. In Step 2, we will determine how the ∗-moments of bs,τ (multipliedon the left and right by freely independent elements) change as we vary τ withs fixed. To determine this, we will need to use the factorization result in Step 1.Finally, in Step 3, we will use Step 2 to show that the ∗-moments of
bs,tτ bs′,tτ ′ and bs+s′,t(τ+τ ′)
satisfy the same differential equation in t, with the same value at t = 0. We willthen conclude the ∗-moments are equal for all t; setting t = 1 gives the factorizationtheorem.
![Page 61: arXiv:2104.07859v1 [math.PR] 16 Apr 2021](https://reader034.fdocument.org/reader034/viewer/2022042718/62676707814e77464c2343d3/html5/thumbnails/61.jpg)
BROWN MEASURE OF BROWNIAN MOTIONS 61
A.1. Factoring with a free unitary Brownian motion. In this section, wecarry out Step 1 in the proof of Theorem 4.3, corresponding to the special caseτ ′ = 0. In this case, the free multiplicative Brownian motion b′s′,0(r) is computableas
b′s′,0(r) = urs′ ,
where u· is a free unitary Brownian motion freely independent of bs,τ (r). The uni-tarity of u· gives us the identities
bs,τ (r)bs,τ (r)∗ = (bs,τ (r)urs′)(bs,τ (r)urs′)∗
u∗rs′urs′ = 1, (A.1)
which of course do not hold if urs′ is replaced by a generic element of the formb′s′,τ ′(r). These identities will play an essential role in the proof of the followingresult.
Proposition A.1. Choose s > 0, s′ > 0, and τ ∈ C so that |τ − s| ≤ s. Let u· bea free unitary Brownian motion that is freely independent of bs,τ (r). Then for anyr > 0, the random variables bs+s′,τ (r) and
as,s′,τ (r) := bs,τ (r)urs′ (A.2)
have the same ∗-distribution.
We will prove Proposition A.1 using the free Ito rules. If we think of urs′ as afree stochastic process with time-variable r, we obtain the scaled version of the freeSDE for ut, namely
durs′ = urs′
(i√s′ dxs −
s′
2dr
).
Using this result, the SDE (2.6) for bs,τ (r), and the stochastic product rule (4.6),we find that the process as,s′,τ (r) satisfies the following free SDE:
das,s′,τ (r) = i√s′as,s′,τ (r) dxr
+ ibs,τ (r) dws,τ (r) urs′ −1
2(s+ s′ − τ)as,s′,τ (r) dr, (A.3)
where xr is a semicircular Brownian motion that is freely independent of ws,τ (r).
Proof of Proposition A.1. In this proof, we assume s0, s, and τ are fixed and usethe notations
br = bs+s′,τ (r); wr = ws+s′,τ (r);
br = bs,τ (r); ar = as,s′,τ (r); wr = ws,τ (r). .
We prove the result by induction on the length of the ∗-moment. It is clear thatbr and ar have the same zeroth-order ∗-moments. Suppose that all the ∗-momentsof order less than n of br and ar are equal and consider a ∗-moment of length n,which we write as tr [bε1r · · · bεnr ] or tr[aε1r · · · aεnr ], with εj ∈ {1, ∗}.
In the case of the ∗-moment of br, the stochastic product rule tells us that
d tr [bε1r · · · bεnr ] =∑j
tr [bε1r · · · dbεjr · · · bεnr ] +∑j<k
tr [bε1r · · · dbεjr · · · dbεkr · · · bεnr ] ,
![Page 62: arXiv:2104.07859v1 [math.PR] 16 Apr 2021](https://reader034.fdocument.org/reader034/viewer/2022042718/62676707814e77464c2343d3/html5/thumbnails/62.jpg)
62 BRIAN C. HALL AND CHING-WEI HO
where the sum over j < k is empty (having a value of 0) if n = 1. Using the SDE(2.6) of br and the Ito rules (4.8), we may easily compute that
d
drtr [bε1r · · · bεnr ] = −1
2tr [bε1r · · · bεnr ]
∑j
(s+ s′ − τεj )
−∑
εj=εk=1
(s+ s′ − τ) tr [bε1r · · · bεjr bεk+1r · · · bεnr ] tr [bεj+1
r · · · bεkr ]
−∑
εj=εk=∗(s+ s′ − τ) tr [bε1r · · · bεjr bεk+1
r · · · bεnr ] tr [bεj+1r · · · bεkr ]
+∑
εj=1, εk=∗(s+ s′) tr [bε1r · · · bεjr bεkr · · · bεnr ] tr [bεj+1
r · · · bεk−1r ]
+∑
εj=∗, εk=1
(s+ s′) tr [bε1r · · · bεj−1r bεk+1
r · · · bεnr ] tr [bεjr · · · bεkr ] ,
(A.4)
where in the last four lines, each sum is over all pairs (j, k) with j < k and εj andεk satisfying the indicated conditions. In the first line, we take τεj = τ if εj = ∗.
The first term on the right-hand side of (A.4) is a multiple of the ∗-moment onthe left-hand side of the equation. All the remaining terms on the right-hand sideof (A.4) are either multiples of the left-hand side (e.g., the term j = k − 1 in thesecond sum on the right-hand side) or products of ∗-moments of b of lower degree.Thus, (A.4) has the form
d
drtr [bε1r · · · bεnr ] = C tr [bε1r · · · bεnr ] + f(r), (A.5)
where f(r) may be considered, inductively, as a known quantity. The equation(A.5) may then be solved by the method of integrating factors.
We now show that tr [aε1r · · · aεnr ] satisfies the same ODE in (A.5). By the sto-chastic product rule,
d tr [aε1r · · · aεnr ] =∑j
tr [aε1r · · · daεjr · · · aεnr ] +∑j<k
tr [aε1r · · · daεjr · · · daεkr · · · aεnr ] .
(A.6)By the SDE (A.3) of a and the free Ito rules (4.5) and (4.8), the first term on theright-hand side of (A.6) is simply
− 1
2tr [aε1r · · · aεnr ]
∑j
(s+ s′ − τεj ). (A.7)
This term is the same as the first term in the right-hand side of (A.4), after replacingthe br by ar.
For the second sum on the right-hand side of (A.6), we separate the computationinto four cases of (εj , εk) ∈ {1, ∗}2. If (εj , εk) = (1, 1), then, after dropping termsthat are equal to zero, we get
tr [aε1r · · · daεjr · · · daεkr · · · aεnr ] = −s′ tr [aε1r · · · aεjr dxr · · · aεkr dxr · · · aεnr ]
+ tr[aε1r · · · (ibr dwr urs′) · · · (ibr dwr urs′) · · · aεn
].
(A.8)
![Page 63: arXiv:2104.07859v1 [math.PR] 16 Apr 2021](https://reader034.fdocument.org/reader034/viewer/2022042718/62676707814e77464c2343d3/html5/thumbnails/63.jpg)
BROWN MEASURE OF BROWNIAN MOTIONS 63
We then apply the Ito rules (4.5) and (4.8). The second term on the right-hand
side of (A.8) is the crucial one: after using (4.8), the br to the left of the first dwrand the urs′ to the right of the second dwr combine to form ar = a
εjr . Meanwhile,
after a cyclic permutation inside the trace, the urs′ to the right of first dwr and thebr to the left of second dwr also combine to form ar = aεkr . After combining terms,we end up with
tr [aε1r · · · daεjr · · · daεkr · · · aεnr ]
= −(s+ s′ − τ) tr [aε1r · · · aεjr aεk+1r · · · aεnr ] tr [aεj+1
r · · · aεkr ] .
This result matches the εj = εk = 1 term in (A.4). The case where (εj , εk) = (∗, ∗)similarly matches the corresponding term in (A.4).
We now turn to the case (εj , εk) ∈ (1, ∗). We compute
tr [aε1r · · · daεjr · · · daεkr · · · aεnr ] = s′ tr [aε1r · · · aεjr dx′ · · · dx′aεkr · · · aεnr ]
+ tr[aε1 · · · br dwr urs′ · · ·u∗rs′ dw∗r b∗r · · · aεn
].
Using the Ito rules (4.5) and (4.8), we obtain
tr [aε1r · · · daεjr · · · daεkr · · · aεnr ]
= s′ tr [aε1r · · · aεjr aεkr · · · aεnr ] tr [aεj+1r · · · aεk−1
r ]
+ s tr[aε1r · · · br b∗r · · · aεnr
]tr [urs′a
εj+1r · · · aεk−1
r u∗rs′ ]
= (s+ s′) tr [aε1r · · · aεjr aεkr · · · aεnr ] tr [aεj+1r · · · aεk−1
r ] , (A.9)
where, in the last equality, we have used both lines of (A.1). Note that the unitarityof urs′ is used in an essential way here. The result of (A.9) matches the εj = 1,εk = ∗ term in (A.4). The case (εj , εk) = (∗, 1) is similar. Summing up all thefour cases and (A.7), we see that tr
[aε1r · · · da
εjr · · · daεkr · · · aεnr
]satisfies the same
equation as in (A.4), after changing br to ar.By the induction hypothesis, all the lower-order ∗-moments of ar and br are
equal. Thus, tr [aε1r · · · aεnr ] satisfies the same ODE as tr [bε1r · · · bεnr ] as in (A.5),with the same constant C and the same function f . Since, also, both functionsequal 1 at r = 0, they are equal for all r. �
A.2. Varying τ with s fixed. In this section, we carry out Step 2 in the proof ofTheorem 4.3, by looking at how the ∗-moments of bs,τ—multiplied on the left andright by freely independent elements—vary as τ varies with s fixed. When doingthe calculation, we will obtain a convenient cancellation that eliminates certainproblematic terms, a cancellation that would not occur if we were varying both sand τ simultaneously. This computation supports the overall philosophy of thispaper, that we obtain the nicest results when τ is varied while keeping s fixed.
Lemma A.2. Fix s and τ with |τ − s| ≤ s and fix a sequence (ε1, . . . , εn) withvalues in {1, ∗}. Suppose a1, a2 ∈ A and bs,tτ (r) are all freely independent. Define
B = a1bs,tτa2
and
f(s, t) = tr[Bε1 · · ·Bεk ].
![Page 64: arXiv:2104.07859v1 [math.PR] 16 Apr 2021](https://reader034.fdocument.org/reader034/viewer/2022042718/62676707814e77464c2343d3/html5/thumbnails/64.jpg)
64 BRIAN C. HALL AND CHING-WEI HO
Then for all t < 1, we have
∂f
∂t=f(s, t)
2
∑j
τεj −∑εj=εk
τεj tr[Bε1 · · ·BεjBεk+1 · · ·Bεn ] tr[Bεj+1 · · ·Bεk ],
(A.10)where τεj = τ if εj = ∗ and where the second sum on the right-hand side of (A.10)is over all pairs j < k with εj = εk.
We emphasize that the second sum on the right-hand side of (A.10) containsonly terms where εj = εk; the terms with εj 6= εk cancel out in the process ofcomputing the derivative with respect to t.
Proof. Let Br = a1bs,tτ (r)a2, so that B = B1. Since bs,tτ (r) has the same ∗-distribution as brs,rtτ , we have
f(rs, rt) = tr[Bε1r · · ·Bεkr ]. (A.11)
Then by the chain rule, we have
d
drf(rs, rt) = s
∂f
∂s(rs, rt) + t
∂f
∂t(rs, rt).
Solving this for the ∂f/∂t term and setting r = 1 gives
∂f
∂t(s, t) =
1
t
d
drf(rs, rt)
∣∣∣∣r=1
− s
t
∂f
∂s(s, t). (A.12)
We now proceed to compute each of the two terms on the right-hand side of (A.12).We first differentiate f(rs, rt) with respect to r, using (A.11). Using the sto-
chastic product rule and the Ito formulas, we easily obtain
d
drf(rs, rt) =
∑j
tr[Bε1r · · · dBεjr · · ·Bεnr ]
dr+∑j<k
tr[Bε1r · · · dBεjr · · · dBεkr · · ·Bεnr ]
dr
= −f(rs, rt)∑j
s− tτεj2
+∑j<k
tr[Bε1r · · · dBεjr · · · dBεkr · · ·Bεnr ]
dr.
(A.13)
We will analyze the last sum in (A.13) in a moment.We next differentiate f(s, t) with respect to s. Since |tτ − s| < s for any t < 1,
we can choose s0 < s such that |tτ − s0| < s. Then by Proposition A.1, the element
Us := a1bs0,tτus−s0a2
has the same ∗-distribution as a1bs,tτa2. We then calculate
∂f
∂s(s, t) =
∑j
tr[Uε1s · · · dUεjs · · ·Uεns ]
ds+∑j<k
tr[Uε1s · · · dUεjs · · · dUεks · · ·Uεns ]
ds
= −n2f(s, t) +
∑j<k
tr[Uε1s · · · dUεjs · · · dUεks · · ·Uεns ]
ds, (A.14)
where we have computed the first sum as
n∑j=1
tr[Uε1s · · · dUεjs · · ·Uεns ]
ds= −1
2
n∑j=1
tr[Uε1s · · ·Uεns ] = −n2f(s, t).
![Page 65: arXiv:2104.07859v1 [math.PR] 16 Apr 2021](https://reader034.fdocument.org/reader034/viewer/2022042718/62676707814e77464c2343d3/html5/thumbnails/65.jpg)
BROWN MEASURE OF BROWNIAN MOTIONS 65
Using (A.12) together with (A.13) and (A.14), we obtain
∂f
∂t− f(s, t)
2
∑j
τεj
=∑j<k
(1
t
tr[Bε1r · · · dBεjr · · · dBεkr · · ·Bεnr ]
dr
∣∣∣∣r=1
− s
t
tr[Uε1s · · · dUεjs · · · dUεks · · ·Bεnr ]
ds
). (A.15)
We then analyze the sum on the right-hand side of (A.15) case by case, startingwith the critical cases where (εj , εk) equals (1, ∗) or (∗, 1). If (εj , εk) = (1, ∗), then
tr[Bε1r · · · dBεjr · · · dBεkr · · ·Bεnr ]
= tr[Bε1r · · · (a1bs,tτ (r) dwr a2) · · · (a∗2 dw∗r bs,tτ (r)∗a∗1) · · ·Bεnr ]
= s tr[Bε1r · · · a1bs,tτ (r)bs,tτ (r)∗a∗1 · · ·Bεnr ] tr[a2Bεj+1r · · ·Bεk−1
r a∗2] dr
where tr[a2Bεj+1r · · ·Bεk−1
r a2] means tr[a2a∗2] if k = j + 1. Similarly,
tr[Uε1s · · · dUεjs · · · dUεks · · ·Uεns ]
= tr[Uε1s · · · (a1bs0,tτus−s0 dxsa2) · · · (a∗2dxsu∗s−s0b∗s0,tτa
∗1) · · ·Uεns ]
= tr[Uε1s · · · (a1bs0,tτ b∗s0,tτa
∗1) · · ·Uεns ] tr[a2U
εj+1s · · ·Uεk−1
s a∗2] ds. (A.16)
In the last line of (A.16), we note that bs0,tτ b∗s0,tτ = (bs0,tτus−s0)(bs0,tτus−s0)∗.
Then after recalling the factorization result in Proposition A.1, we get a cancella-tion:
1
t
tr[Bε1r · · · dBεjr · · · dBεkr · · ·Bεnr ]
dr
∣∣∣∣r=1
− s
t
tr[Uε1s · · · dUεjs · · · dUεks · · ·Uεns ]
ds= 0.
The above equality also holds for the case (εj , εl) = (∗, 1) by a similar computationthat again uses the unitarity of us−s0 .
We now consider the case εj = εl = 1. In this case, we can directly verify that
1
t
tr[Bε1r · · · dBεjr · · · dBεkr · · ·Bεnr ]
dr
∣∣∣∣r=1
=s− tτt
tr[Bε1 · · ·BεjBεk+1 · · ·Bεnr ] tr[Bεj+1 · · ·Bεk ]
and
s
t
tr[Uε1s · · · dUεjs · · · dUεks · · ·Uεns ]
ds=s
ttr[Uε1s · · ·Uεjs Uεk+1
s · · ·Uεns ] tr[Uεj+1s · · ·Uεks ]
=s
ttr[Bε1 · · ·BεjBεk+1 · · ·Bεn ] tr[Bεj+1 · · ·Bεk ].
Subtracting these equations gives a cancellation of the terms involving s/t. Theabove equations hold in the case εj = εl = ∗, except with s− tτ replaced by s− tτin the first line. Combining the four cases in (A.15), we obtain the result claimedin the proposition. �
![Page 66: arXiv:2104.07859v1 [math.PR] 16 Apr 2021](https://reader034.fdocument.org/reader034/viewer/2022042718/62676707814e77464c2343d3/html5/thumbnails/66.jpg)
66 BRIAN C. HALL AND CHING-WEI HO
A.3. The proof of the main result. We are now ready for the proof of our mainfactorization result.
Proof of Theorem 4.3. Write
At,t′ = bs,tτ bs′,t′τ ′
Bt = bs+s′,t(τ+τ ′).
We want show that At,t and Bt have the same ∗-moments by mathematical in-duction on the order n of ∗-moments, starting from the trivial case n = 0. In theinduction step, we will obtain differential equations for the ∗-moments of At,t andBt with respect to t.
Assume all the ∗-moments of length less than n are equal, consider a sequence(ε1, . . . , εn) taking values in {1, ∗}, and consider the functions
f(t) = tr[Aε1t,t · · ·Aεkt,t]
and
g(t) = tr[Bε1t · · ·Bεkt ].
Since usu′s′ has the same ∗-distribution as us+s′ where u and u′ are freely inde-
pendent free unitary Brownian motions, f(0) = g(0). Our goal is to show thatf(t) = g(t) for 0 ≤ t ≤ 1.
Let
h(t, t′) = tr[Aε1t,t′ · · ·Aεt,t′ ].
Applying Lemma A.2 with a1 = 1, a2 = bs,tτ , we have
∂h
dt=h(t, t′)
2
∑j
τεj −∑εj=εk
τεj tr[Aε1t,t′ · · ·Aεjt,t′A
εk+1
t,t′ · · ·Aεnt,t′ ] tr[A
εj+1
t,t′ · · ·Aεkt,t′ ].
Similarly, by applying Lemma A.2 with a1 = bs,tτ , a2 = 1, and with s′, τ ′ in placeof s, τ , we have
∂h
dt′=h(t, t′)
2
∑j
(τ ′)εj −∑εj=εk
(τ ′)εj tr[Aε1t,t′ · · ·Aεjt,t′A
εk+1
t,t′ · · ·Aεnt,t′ ] tr[A
εj+1
t,t′ · · ·Aεkt,t′ ].
Since f(t) = h(t, t), the chain rule tells us that
df
dt=∂h
∂t(t, t) +
∂h
∂t′(t, t)
=f(t)
2
∑j
(τ + τ ′)εj
−∑εj=εk
(τ + τ ′ )εj tr[Aε1t,t · · ·Aεjt,tA
εk+1
t,t · · ·Aεnt,t] tr[A
εj+1
t,t · · ·Aεkt,t]. (A.17)
Meanwhile, by directly applying Lemma A.2, we find that the function g satisfiesthe same formula as in (A.17), but with At,t replaced by Bt everywhere. Now, bythe induction hypothesis, all the lower moments of At,t and Bt are equal. Wetherefore conclude that f and g satisfy the same first-order linear ODE. Since wealso have f(0) = g(0), as we have noted, we conclude that f(t) = g(t) for all t < 1.Equality also holds when t = 1 by the continuous dependence of bs,τ on τ (SectionB). This completes the proof using mathematical induction, and we conclude thatAt,t and Bt have the same ∗-distribution. �
![Page 67: arXiv:2104.07859v1 [math.PR] 16 Apr 2021](https://reader034.fdocument.org/reader034/viewer/2022042718/62676707814e77464c2343d3/html5/thumbnails/67.jpg)
BROWN MEASURE OF BROWNIAN MOTIONS 67
Appendix B. Continuous dependence of bs,τ on τ
We consider a free SDE of the form
dbr = br(α dxr + β dxr + γ dr)
with initial condition b0, where α, β, and γ are fixed complex numbers. In integralform, this reads as
br = b0 + α
∫ r
0
bu dxu + β
∫ r
0
bu dxu + γ
∫ r
0
bu du. (B.1)
We will show that the solution depends continuously on the constants α, β, and γ.We first give an a priori bound on the size of the solutions.
Proposition B.1. Given any r0 > 0, we have the inequality
‖br‖2 ≤ ‖b0‖2(
1 + (2√
2(|α|+ |β|) + r0|γ|)2)e(1+(2
√2(|α|+|β|)+r0|γ|)2)r
for all r ≤ r0.
Proof. We take the norm of both sides of (B.1) and apply the free Burkholder–Davis–Gundy inequality [5, Theorem 3.2.1], giving
‖br‖ ≤ ‖b0‖+ 2√
2(|α|+ |β|)(∫ r
0
‖bu‖2 du)1/2
+ |γ|∫ r
0
‖bu‖ du. (B.2)
Using the Cauchy–Schwarz inequality twice (once for the last integral in (B.2) andonce for numbers) we have
‖br‖ ≤ ‖b0‖+ (2√
2(|α|+ |β|) + |γ|r0)
(∫ r
0
‖bu‖2du)1/2
≤(‖b0‖2 +
∫ r
0
‖bu‖2du)1/2 (
1 + (2√
2(|α|+ |β|) + r0|γ|)2)1/2
. (B.3)
If we square both sides of (B.3) and apply Gronwall’s inequality [31, Theorem 1.2.2],we obtain
‖br‖2 ≤ ‖b0‖2(
1 + (2√
2(|α|+ |β|) + r0|γ|)2)e(1+(2
√2(|α|+|β|)+r0|γ|)2)r
for all r ≤ r0, as desired. �
Now consider br and b′r satisfying (B.1) with constants α, β, γ and α′, β′, γ′,respectively, and define
v(r) = ‖br − b′r‖.Then we have the following estimate, showing that br is close to b′r when (α, β, γ)is close to (α′, β′, γ′).
Theorem B.2. Fix r0 and assume α, β, γ, α′, β′, γ′ lie in a disk of some fixedradius. Then there exists a constant C > 0 such that
v(r)2 ≤ C(
2√
2(|α− α′|+ |β − β′|) + r0 |γ − γ′|)2
eCr, r ≤ r0.
In particular, v(r)→ 0 uniformly in r ∈ [0, r0] as (α, β)→ (α′, β′).
![Page 68: arXiv:2104.07859v1 [math.PR] 16 Apr 2021](https://reader034.fdocument.org/reader034/viewer/2022042718/62676707814e77464c2343d3/html5/thumbnails/68.jpg)
68 BRIAN C. HALL AND CHING-WEI HO
Proof. We compute
bt − b′t =
∫ t
0
[(α− α′)br + α′(br − b′r)] dxr +
∫ t
0
[(β − β′)br + β′(br − b′r)] dxr
+
∫ t
0
[(γ − γ′)br + γ′(br − b′r)] dr.
By the free Burkholder–Davis–Gundy inequality,
v(r) ≤ 2√
2
(∫ r
0
[(|α− α′|+ |β − β′|)‖bu‖+ (|α′|+ |β′|)v(u)]2 du
)1/2
+
∫ r
0
(|γ − γ′| ‖bu‖+ |γ′| v(u)) du.
We now apply the Minkowski inequality to the first integral and Cauchy–Schwarzinequalities to the second integral and collect terms to obtain
v(r) ≤(
2√
2(|α− α′|+ |β − β′|) + r |γ − γ′|)(∫ r
0
‖bu‖2du)1/2
+(
2√
2(|α′|+ |β|) + r0 |γ′|)(∫ r
0
v(u)2 du
)1/2
.
Applying the two-dimensional Cauchy–Schwarz inequality to the above estimate,we have
v(r)2 ≤[(
2√
2(|α− α′|+ |β − β′|) + r0 |γ − γ′|)2
+
∫ r
0
v(u)2du
]×[∫ r
0
‖bu‖2du+(
2√
2(|α′|+ |β′|) + r0 |γ′|)2]. (B.4)
We may now bound the second factor on the right-hand side of (B.4) by a constant Cusing Proposition B.1. Applying Gronwall’s inequality gives the claimed estimate.
�
B.1. Acknowledgments. The authors thank Hari Bercovici, Guillaume Cebron,Bruce Driver, Todd Kemp, Vaki Nikitopoulos, and Ping Zhong for useful discus-sions. We especially thank Bruce Driver for showing us the proof of Lemma 8.7.
References
[1] Z. D. Bai, Circular law, Ann. Probab. 25 (1997), 494–529.
[2] S. T. Belinschi and H. Bercovici, Partially defined semigroups relative to multiplicative free
convolution, Int. Math. Res. Not. 2005, 65–101.[3] P. Biane, Free Brownian motion, free stochastic calculus and random matrices. In Free prob-
ability theory (Waterloo, ON, 1995), 1–19, Fields Inst. Commun., 12, Amer. Math. Soc.,Providence, RI, 1997.
[4] P. Biane, Segal–Bargmann transform, functional calculus on matrix spaces and the theory of
semicircular and circular systems, J. Funct. Anal. 144 (1997), 232–286.
[5] P. Biane and R. Speicher, Stochastic calculus with respect to free Brownian motion andanalysis on Wigner space, Probab. Theory Related Fields 112 (1998), 373–409.
[6] L. G. Brown, Lidskiı’s theorem in the type II case. In Geometric methods in operator algebras(Kyoto, 1983), 1–35, Pitman Res. Notes Math. Ser., 123, Longman Sci. Tech., Harlow, 1986.
[7] M. Capitaine and C. Donati-Martin, Free Wishart processes, J. Theoret. Probab. 18 (2005),
413–438.[8] A. Z. Chan, The Segal-Bargmann transform on classical matrix Lie groups, J. Funct. Anal.
278 (2020), Article 108430, 59 pp.
![Page 69: arXiv:2104.07859v1 [math.PR] 16 Apr 2021](https://reader034.fdocument.org/reader034/viewer/2022042718/62676707814e77464c2343d3/html5/thumbnails/69.jpg)
BROWN MEASURE OF BROWNIAN MOTIONS 69
[9] B. K. Driver, B. C. Hall, Yang-Mills theory and the Segal-Bargmann transform, Comm.
Math. Phys. 201 (1999), 249–290.
[10] N. Demni and T. Hamdi, Support of the Brown measure of the product of a free unitaryBrownian motion by a free self-adjoint projection, J. Funct. Anal., to appear.
[11] B. K. Driver, B. C. Hall, and T. Kemp, The large-N limit of the Segal-Bargmann transform
on UN , J. Funct. Anal. 265 (2013), 2585–2644.[12] B. K. Driver, B. C. Hall, and T. Kemp, The complex-time Segal-Bargmann transform, J.
Funct. Anal. 278 (2020), Article 108303, 42 pp.
[13] B. K. Driver, B. C. Hall, and T. Kemp, The Brown measure of the free multiplicative Brow-nian motion, arXiv:1903.11015 [math.PR].
[14] L. C. Evans, Partial differential equations. Second edition. Graduate Studies in Mathematics,
19. American Mathematical Society, Providence, RI, 2010. xxii+749 pp.[15] V. L. Girko, The circular law, Theory Probab. Appl. 29 (1984), 694–706.
[16] Jacek Grela, Maciej A. Nowak, Wojciech Tarnowski, Eikonal formulation of large dynamicalrandom matrix models, Phys. Rev. E 104 (2021), Article 054111, 12 pp.
[17] A. Guionnet, M. Krishnapur, and O. Zeitouni, The single ring theorem, Ann. of Math. (2)
174 (2011), 1189–1217.[18] B. C. Hall, A new form of the Segal-Bargmann transform for Lie groups of compact type,
Canad. J. Math. 51 (1999), 816–834.
[19] B. C. Hall, PDE methods in random matrix theory. In Harmonic analysis and applications(M. T. Rassias, Ed.), 77-124, Springer 2021.
[20] B. C. Hall and C.-W. Ho, The Brown measure of the sum of a self-adjoint element and an
imaginary multiple of a semicircular element, preprint arXiv:2006.07168 [math.PR][21] B. C. Hall, and T. Kemp, Brown measure support and the free multiplicative Brownian
motion, Adv. Math. 355 (2019), Article 106771, 36 pp.
[22] C.-W. Ho, The two-parameter free unitary Segal-Bargmann transform and its Biane-Gross-Malliavin identification, J. Funct. Anal. 271 (2016), 3765–3817.
[23] C.-W. Ho and P. Zhong, Brown Measures of free circular and multiplicative Brownian motionswith self-adjoint and unitary initial conditions, J. Europ. Math. Soc., to appear.
[24] T. Kemp, The large-N limits of Brownian motions on GLN , Int. Math. Res. Not., (2016),
4012–4057.[25] B. Kummerer and R. Speicher, Stochastic integration on the Cuntz algebra O∞, J. Funct.
Anal. 103 (1992), 372–408.
[26] R. Lohmayer, H. Neuberger, T. Wettig, Possible large-N transitions for complex Wilson loopmatrices, J. High Energy Phys. (2008), Article 053, 44 pp.
[27] J. A. Mingo and R. Speicher, Free probability and random matrices. Fields Institute Mono-
graphs, 35. Springer, New York; Fields Institute for Research in Mathematical Sciences,Toronto, ON, 2017.
[28] F. Morgan, Geometric measure theory. A beginner’s guide. Fifth edition. Illustrated by James
F. Bredt. Elsevier/Academic Press, Amsterdam, 2016.[29] A. Nica and R. Speicher, Lectures on the combinatorics of free probability. London Mathe-
matical Society Lecture Note Series, 335. Cambridge University Press, Cambridge, 2006.[30] E. A. Nikitopoulos, Ito’s formula for noncommutative C2 functions of free Ito processes with
respect to circular Brownian motion, preprint arXiv:2011.08493 [math.OA].
[31] B. B. Pachpatte, Inequalities for differential and integral equations. Mathematics in Scienceand Engineering, 197. Academic Press, Inc., San Diego, CA, 1998.
[32] W. Rudin, Real and complex analysis. Third edition. McGraw-Hill Book Co., New York,1987.
[33] T. Tao and V. Vu, Random matrices: universality of ESDs and the circular law. With an
appendix by Manjunath Krishnapur, Ann. Probab. 38 (2010), 2023–2065.
[34] D. V. Voiculescu, Limit laws for random matrices and free products, Invent. Math. 104(1991), 201–220.
[35] D. V. Voiculescu, A strengthened asymptotic freeness result for random matrices with appli-cations to free entropy, Internat. Math. Res. Notices 1998, 41–63.
[36] P. Zhong, On the free convolution with a free multiplicative analogue of the normal distribu-
tion, J. Theoret. Probab. 28 (2015), 1354–1379
[37] P. Zhong, Brown measure of the sum of an elliptic operator and a free random variable in afinite von Neumann algebra, preprint arXiv:2108.09844 [math.OA]





![arXiv:1005.0402v1 [math.PR] 3 May 2010 · arXiv:1005.0402v1 [math.PR] 3 May 2010 THE DISTRIBUTION OF EIGENVALUES OF RANDOMIZED PERMUTATION MATRICES JOSEPH NAJNUDEL AND ASHKAN NIKEGHBALI](https://static.fdocument.org/doc/165x107/5eab1fa51da2f83d0455dbf2/arxiv10050402v1-mathpr-3-may-2010-arxiv10050402v1-mathpr-3-may-2010-the.jpg)

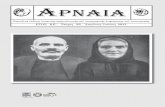




![Let arXiv:2004.06968v1 [math.PR] 15 Apr 2020 › pdf › 2004.06968.pdfAND MARTIN BOUNDARY PHILIP A. ERNST AND SANDRO FRANCESCHI Abstract. Let ˇbe the occupancy density of an obliquely](https://static.fdocument.org/doc/165x107/60be1798ffb31049fb5b77bf/let-arxiv200406968v1-mathpr-15-apr-2020-a-pdf-a-200406968pdf-and-martin.jpg)
![FeiPu arXiv:2008.08267v3 [math.PR] 1 Nov 2020 · arXiv:2008.08267v3 [math.PR] 1 Nov 2020 Gaussian fluctuation for spatial average of parabolic Anderson model with Neumann/Dirichlet/periodic](https://static.fdocument.org/doc/165x107/60c96c3295781761cd34edc8/feipu-arxiv200808267v3-mathpr-1-nov-2020-arxiv200808267v3-mathpr-1-nov.jpg)

