
Anomalous solutions to the Monge Ampère equation in two ...
18
Anomalous solutions to the Monge Amp ` ere equation in two dimensions and pre-strained elasticity Reza Pakzad University of Pittsburgh 11 Mars 2016 Universit ´ e Pierre et Marie Curie, Laboratoire Jacques Louis Lions 1 / 18
Transcript of Anomalous solutions to the Monge Ampère equation in two ...
Anomalous solutions to the Monge Ampereequation in two dimensions and pre-strained
elasticity
Reza Pakzad
University of Pittsburgh
11 Mars 2016Universite Pierre et Marie Curie, Laboratoire Jacques Louis Lions
1 / 18

Motivation
The Monge-Ampere constrained plate model:(Friesecke-James-Muller 2006; Lewicka-Ochoa-P. 2014)
ω⊂ R2, f : ω→ R.
Minimize If (u) =∫
ω|D2u|2 in the class of Monge-Ampere
solutions:MAf := u : ω→ R ; detD2u = f a.e.,
∫ω
|D2u|2 < ∞Main problems:Existence of admissible solutions,(with or without boundary conditions).Uniqueness and regularity of minimizers/ critical points.Study of Sobolev (W 2,2), weak or very weak MA solutions.
2 / 18
Weak solutions to the Monge-Ampere equation:
ω⊂ R2.
Weak Solutions: Weak Hessian Det D(Du) = f ,where for Ψ = (Ψ1,Ψ2) : ω→ R2, the distributional Jacobian is:
Det D(Ψ) := (Ψ1Ψ2,2),1− (Ψ1Ψ2
,1),2.
Well defined for u ∈W 2,ploc , p ≥ 4
3 or u ∈W 2,1loc ∩W 1,∞
loc . Coincideswith det(D2u) when u ∈W 2,2.
Very Weak Solutions: The very weak Hessian determinant foru ∈W 1,2
loc :
DetD2u :=−12
[(|u,1|2),22 + (|u,2|2),11−2(u,1u,2),12
](Iwaniec 2001) DetD2 is weakly sequentially discontinuous onW 1,p for all p ≥ 2 at u0 = 0.
3 / 18

Weak solutions to the Monge-Ampere equation:
ω⊂ R2.
Weak Solutions: Weak Hessian Det D(Du) = f ,where for Ψ = (Ψ1,Ψ2) : ω→ R2, the distributional Jacobian is:
Det D(Ψ) := (Ψ1Ψ2,2),1− (Ψ1Ψ2
,1),2.
Well defined for u ∈W 2,ploc , p ≥ 4
3 or u ∈W 2,1loc ∩W 1,∞
loc . Coincideswith det(D2u) when u ∈W 2,2.
Very Weak Solutions: The very weak Hessian determinant foru ∈W 1,2
loc :
DetD2u :=−12
curltcurl(Du⊗Du)
(Iwaniec 2001) DetD2 is weakly sequentially discontinuous onW 1,p for all p ≥ 2 at u0 = 0.
4 / 18
Rigidity and flexibility for the Monge-Ampere equation
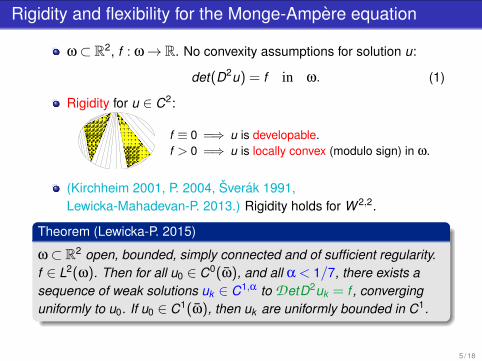
ω⊂ R2, f : ω→ R. No convexity assumptions for solution u:
det(D2u) = f in ω. (1)
Rigidity for u ∈ C2:ON THE SOBOLEV SPACE OF ISOMETRIC IMMERSIONS 51
Figure 1. The inverse images of f .
Remark 1.4. Since ∇f is symmetric, we can write f = ∇φ for someφ ∈ W 2,2(Ω, R) and we have
det(∇2φ) = 0
which is the degenerate Monge-Ampere equation. Note that the graphof φ is a flat surface in R3.
Remark 1.5. An interesting counter example which shows that theconditions are optimal is the radial map x
‖x‖ ∈ W 1,2−ε(B2, R2) for ε > 0.
B. Kirchheim has proved Proposition 1.1 under an extra assumptionof the Lipschitz continuity of f . (See [14], Proposition 2.29.) The proofwe present here for W 1,2 case is essentially the same.
The paper is organised as follows. In Section 2 we give a prove ofProposition 1.1 based on which we prove the developability theoremfor W 2,2 isometric immersions. In Section 3 we prove the main densityresult. The main idea of the proof of Theorem I is to use the developa-bility of the image. We reparameterise the map u ∈ I2,2(Ω, R3) along itsleading curves; the curves in the domain and on the image surface whichare orthogonal to the directions in which one of the principle curvaturesvanish. Then by writing the equations of geodesic and normal curvatureof a leading curve in the image related to its Darboux frame we man-age to reduce the problem to the approximation of these functions by
f ≡ 0 =⇒ u is developable.f > 0 =⇒ u is locally convex (modulo sign) in ω.
(Kirchheim 2001, P. 2004, Sverak 1991,Lewicka-Mahadevan-P. 2013.) Rigidity holds for W 2,2.
Theorem (Lewicka-P. 2015)
ω⊂ R2 open, bounded, simply connected and of sufficient regularity.f ∈ L2(ω). Then for all u0 ∈ C0(ω), and all α < 1/7, there exists asequence of weak solutions uk ∈ C1,α to DetD2uk = f , converginguniformly to u0. If u0 ∈ C1(ω), then uk are uniformly bounded in C1.
5 / 18

Existence of anomalous very weak solutions
An h-principle:
Theorem (Lewicka-P. 2015)
ω⊂ R2 open, bounded, simply connected and of sufficient regularity.f ∈ L2(ω). Then for all u0 ∈ C0(ω), and all α < 1/7, there exists asequence of weak solutions uk ∈ C1,α to DetD2uk = f , converginguniformly to u0. If u0 ∈ C1(ω), then uk are uniformly bounded in C1.
Compare with:
Theorem (Nash and Kuiper 1955)
Let g be a smooth Riemannian metric on ω and y0 : (ω,g)→ R3 be asmooth short immersion:
0 < y∗0 e := (∇y0)t∇y0 < g.
Then there exists a sequence of C1 isometric embeddings of (ω,g)into R3 uniformly converging to y0.
6 / 18
Rigidity/Flexibility of isometric Immersions
(Darboux) Smooth isometric immersions of flat 2d domains intoR3 are developable.(Hilbert) Smooth isometric immersions of the sphere into R3 arerigid motions.(Hartman-Nirenberg 1959) C2 is enough for rigidity.(Pogorelov 1956) C1 with bounded extrinsic curvature is enough.(P. 2004, Hornung-Velcic 2015) Rigidity of Sobolev isometries ofclass W 2,2.(Borisov 2004) Nash-Kuiper scheme yields C1,α isometries,α < 1/13 for analytic metrics, points to α < 1/7.(Conti-De Lellis-Szekelyhidi 2010) Same for α < 1/7.(De Lellis-Inauen-Szekelyhidi 2015) Same for α < 1/5.(Borisov 50’s) Rigidity of isometric immersions of sphere forα > 2/3.(Conti-De Lellis-Szekelyhidi 2010) Same result using a moreanalytical approach: a commutator estimate.Conjectures for critical α: 1/3,1/2,2/3?
7 / 18
Euler equations:
3d incompressible Euler equations:u : T3× [0,T ]→ R3,p : T3× [0,T ]→ R.
∂tu + u ·∇u + ∇p = 0divu = 0
Flexibility below C 0,1/5 (Delellis-Szekelyhidi, Isett): existence ofL∞(0,T ;C α(T3)) solutions compactly supported in time(Buckmaster-Delellis-Isett-Szekelyhidi): existence of solutionswith arbitrary temporal kinetic energy profile;
Rigidity beyond C 0,1/3 (Constantin-E-Titi, Eyink): everyL∞(0,T ;C α(T3)) solution is energy conserving;
Expected threshold: 13 (Onsager’s conjecture)
8 / 18

Euler equations:
3d incompressible Euler equations:u : T3× [0,T ]→ R3,p : T3× [0,T ]→ R.
∂tu + div(u⊗u) + ∇p = 0divu = 0
Flexibility below C 0,1/5 (Delellis-Szekelyhidi, Isett): existence ofL∞(0,T ;C α(T3)) solutions compactly supported in time(Buckmaster-Delellis-Isett-Szekelyhidi): existence of solutionswith arbitrary temporal kinetic energy profile;
Rigidity beyond C 0,1/3 (Constantin-E-Titi, Eyink): everyL∞(0,T ;C α(T3)) solution is energy conserving;
Expected threshold: 13 (Onsager’s conjecture)
9 / 18
Convex integration for the Monge-Ampere equation
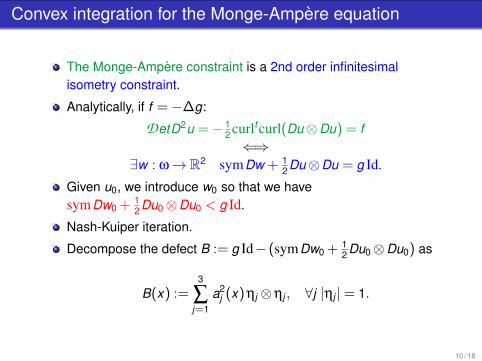
The Monge-Ampere constraint is a 2nd order infinitesimalisometry constraint.
Analytically, if f =−∆g:
DetD2u =−12 curltcurl(Du⊗Du) = f⇐⇒
∃w : ω→ R2 symDw + 12 Du⊗Du = g Id.
Given u0, we introduce w0 so that we havesymDw0 + 1
2 Du0⊗Du0 < g Id.
Nash-Kuiper iteration.
Decompose the defect B := g Id− (symDw0 + 12 Du0⊗Du0) as
B(x) :=3
∑j=1
a2j (x)ηj ⊗ηj , ∀j |ηj |= 1.
10 / 18

Iteration a la Nash & Kuiper 1
Step: Introduce one dimensional oscillations to recompense adefect of the form a2η⊗η.u1(x) := u0(x)+ 1
λa(x)p(t)
Du1(x) = Du0(x)+a(x)p′(t)η + O( 1λ
)w1 = w0− 1
λap(t)Du0+ 1
λa2q(t)η
Dw1 = Dw0−ap′(t)(η⊗Du0)+a2q′(t)(η⊗η) + O( 1λ
)symDw1 + 1
2 Du1⊗Du1
= symDw0 + 12 Du0⊗Du0 +ap′(t)sym(η⊗Du0)
−ap′(t)sym(η⊗Du0) +a2( 12 (p′)2(t)+q′(t))η⊗η +O( 1
λ).
t = λx ·η.Need p,q and their derivatives bounded for all t ∈ R and12 (p′)2 + q′ ≡ 1.
γ = (p,q) ∈ C∞(R,R2)Need γ bounded with bounded derivatives.
γ periodic =⇒∫
γ′(t)dt = (0,0).
Need (0,0) to be in the convex hull of P. Solve for γ′(t) ∈ P11 / 18

Iteration a la Nash & Kuiper 2
Stage: Given (u, w), repeat steps 3 times in three directions ηi
to obtain (u, w) such that for
E := ‖B‖0 =∥∥∥g Id− (symDw +
12
Du⊗Du)∥∥∥
0and λ > 1:
‖u− u‖0 +‖w− w‖0 ≤ C E1/2
λ
‖u− u‖1 +‖w− w‖1 ≤ CE1/2
−→ ‖·‖1 ∼ λ−m/2
‖u− u‖2 +‖w− w‖2 ≤ C(1 +‖u‖2 +‖w‖2)λ3
−→ ‖·‖2 ∼ λ3m
E :=∥∥∥g Id− (symDw +
12
Du⊗Du)∥∥∥
0≤ CEλ
−1
−→ Em ∼ λ−m
Iterate the stages and interpolate to get a sequence(um, wm)→ (u,w) in C1,α.α < 1/7 since 3 steps are needed.Better regularity expected if one can reduce the number of steps.Best to hope through this method α < 1/3.
12 / 18
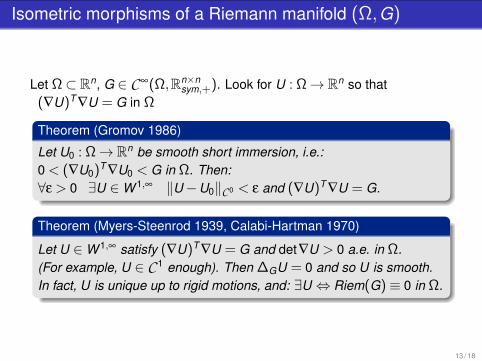
Isometric morphisms of a Riemann manifold (Ω,G)
Let Ω⊂ Rn, G ∈ C ∞(Ω,Rn×nsym,+). Look for U : Ω→ Rn so that
(∇U)T ∇U = G in Ω
Theorem (Gromov 1986)
Let U0 : Ω→ Rn be smooth short immersion, i.e.:0 < (∇U0)T ∇U0 < G in Ω. Then:∀ε > 0 ∃U ∈W 1,∞ ‖U−U0‖C 0 < ε and (∇U)T ∇U = G.
Theorem (Myers-Steenrod 1939, Calabi-Hartman 1970)
Let U ∈W 1,∞ satisfy (∇U)T ∇U = G and det∇U > 0 a.e. in Ω.(For example, U ∈ C 1 enough). Then ∆GU = 0 and so U is smooth.In fact, U is unique up to rigid motions, and: ∃U ⇔ Riem(G)≡ 0 in Ω.
13 / 18
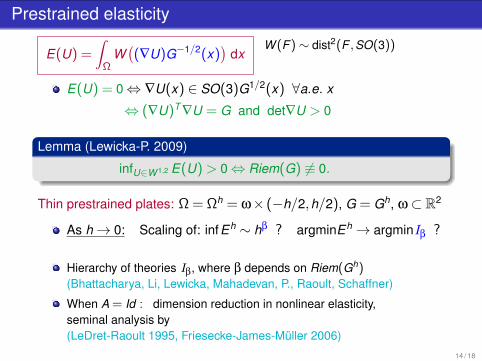
Prestrained elasticity
E(U) =∫
ΩW((∇U)G−1/2(x)
)dx
W (F)∼ dist2(F ,SO(3))
E(U) = 0⇔ ∇U(x) ∈ SO(3)G1/2(x) ∀a.e. x
⇔ (∇U)T ∇U = G and det∇U > 0
Lemma (Lewicka-P. 2009)
infU∈W 1,2 E(U) > 0⇔ Riem(G) 6≡ 0.
Thin prestrained plates: Ω = Ωh = ω× (−h/2,h/2), G = Gh, ω⊂ R2
As h→ 0: Scaling of: infEh ∼ hβ ? argminEh→ argminIβ ?
Hierarchy of theories Iβ, where β depends on Riem(Gh)(Bhattacharya, Li, Lewicka, Mahadevan, P., Raoult, Schaffner)
When A = Id : dimension reduction in nonlinear elasticity,seminal analysis by(LeDret-Raoult 1995, Friesecke-James-Muller 2006)
14 / 18
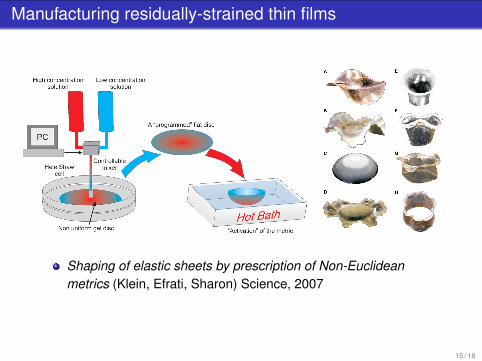
Manufacturing residually-strained thin films
Shaping of elastic sheets by prescription of Non-Euclideanmetrics (Klein, Efrati, Sharon) Science, 2007
15 / 18
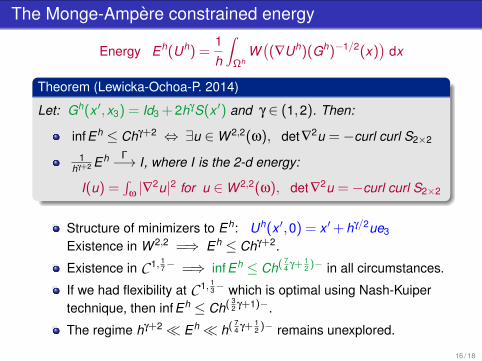
The Monge-Ampere constrained energy
Energy Eh(Uh) =1h
∫Ωh
W((∇Uh)(Gh)−1/2(x)
)dx
Theorem (Lewicka-Ochoa-P. 2014)
Let: Gh(x ′,x3) = Id3 + 2hγS(x ′) and γ ∈ (1,2). Then:
infEh ≤ Chγ+2 ⇔ ∃u ∈W 2,2(ω), det∇2u =−curl curl S2×2
1hγ+2 Eh Γ−→ I, where I is the 2-d energy:
I(u) =∫
ω|∇2u|2 for u ∈W 2,2(ω), det∇2u =−curl curl S2×2
Structure of minimizers to Eh: Uh(x ′,0) = x ′+ hγ/2ue3
Existence in W 2,2 =⇒ Eh ≤ Chγ+2.
Existence in C 1, 17− =⇒ infEh ≤ Ch( 7
4 γ+ 12 )− in all circumstances.
If we had flexibility at C 1, 13− which is optimal using Nash-Kuiper
technique, then infEh ≤ Ch( 32 γ+1)−.
The regime hγ+2 Eh h( 74 γ+ 1
2 )− remains unexplored.
16 / 18
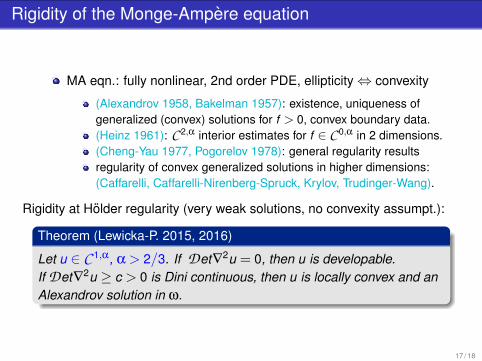
Rigidity of the Monge-Ampere equation
MA eqn.: fully nonlinear, 2nd order PDE, ellipticity⇔ convexity
(Alexandrov 1958, Bakelman 1957): existence, uniqueness ofgeneralized (convex) solutions for f > 0, convex boundary data.(Heinz 1961): C 2,α interior estimates for f ∈ C 0,α in 2 dimensions.(Cheng-Yau 1977, Pogorelov 1978): general regularity resultsregularity of convex generalized solutions in higher dimensions:(Caffarelli, Caffarelli-Nirenberg-Spruck, Krylov, Trudinger-Wang).
Rigidity at Holder regularity (very weak solutions, no convexity assumpt.):
Theorem (Lewicka-P. 2015, 2016)
Let u ∈ C 1,α, α > 2/3. If Det∇2u = 0, then u is developable.If Det∇2u ≥ c > 0 is Dini continuous, then u is locally convex and anAlexandrov solution in ω.
17 / 18
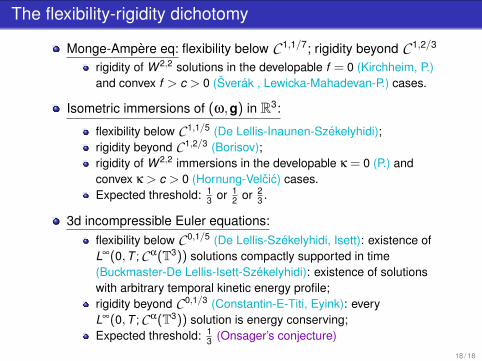
The flexibility-rigidity dichotomy
Monge-Ampere eq: flexibility below C 1,1/7; rigidity beyond C 1,2/3
rigidity of W 2,2 solutions in the developable f = 0 (Kirchheim, P.)and convex f > c > 0 (Sverak , Lewicka-Mahadevan-P.) cases.
Isometric immersions of (ω,g) in R3:
flexibility below C 1,1/5 (De Lellis-Inaunen-Szekelyhidi);rigidity beyond C 1,2/3 (Borisov);rigidity of W 2,2 immersions in the developable κ = 0 (P.) andconvex κ > c > 0 (Hornung-Velcic) cases.Expected threshold: 1
3 or 12 or 2
3 .
3d incompressible Euler equations:flexibility below C 0,1/5 (De Lellis-Szekelyhidi, Isett): existence ofL∞(0,T ;C α(T3)) solutions compactly supported in time(Buckmaster-De Lellis-Isett-Szekelyhidi): existence of solutionswith arbitrary temporal kinetic energy profile;rigidity beyond C 0,1/3 (Constantin-E-Titi, Eyink): everyL∞(0,T ;C α(T3)) solution is energy conserving;Expected threshold: 1
3 (Onsager’s conjecture)
18 / 18




![arXiv:0907.4490v1 [math.CV] 27 Jul 2009 · X is of the form µ= Tnfor some T∈ T (X,ω) with full Monge-Amp`ere mass, which is furthermore unique as was later shown in this generality](https://static.fdocument.org/doc/165x107/5b8527557f8b9ae5498dd27c/arxiv09074490v1-mathcv-27-jul-2009-x-is-of-the-form-tnfor-some-t.jpg)









![Diogo Boito - SAIFR · 2015. 11. 10. · Diogo Boito-- M Beneke, DB, Y.-M. Wang, JHEP 1411 (2014) [arXiv:1406.1361] Anomalous Higgs couplings in angular asymmetries of H → Z+−](https://static.fdocument.org/doc/165x107/5ff957eac5859365a122dcb5/diogo-boito-2015-11-10-diogo-boito-m-beneke-db-y-m-wang-jhep-1411.jpg)