Analysis of bifurcations in non-smooth dynamical systems ...Inspired by this model we study a...
1
Analysis of bifurcations in non-smooth dynamical systems with applications to ship maneuvering Research Group Applied Analysis Pattern formation www.anan.math.uni-bremen.de Spectral theory Dynamical systems Funded by Deutsche Forschungsgemeinschaft (RTG π 3 project R2-3) Miriam Steinherr Zazo & Prof. Dr. Jens Rademacher University of Bremen Faculty of Mathematics and Computer Science [email protected] Abstract A general system of non-smooth equations, motivated by models for ship maneuvering, has been analyzed. In particular, a two dimensional system of ODEs with non-smoothnesses of the type |u i |u j has been investigated. A theorem has been obtained providing the existence of a Hopf bifurcation for specific conditions for the coefficients multiplying the non-smooth terms. Furthermore, some results regarding sub- and supercriticality are presented. Motivation and Marine Craft Modeling A marine craft must perform certain maneuvers in order to be certified. Therefore, vessel models are examined in simulations, which involve mathematical analysis. The prediction of maneuvering properties of ships is a fundamental problem in their design. The vectorial representation of the rigid-body equations of motion is M ˙ ν = F (ν ), where • ν is the velocity and ˙ ν is its time derivative. • M is the matrix with the added mass coefficients and the moments of inertia. • F contains the Coriolis term and the contribution forces from the hull, the rudder and the propeller, as well as the hydrodynamic forces. The hydrodynamic forces can be modeled employing second-order modulus terms [1], which are motivated by the drag equation for high-enough Reynolds number: F D = - 1 2 ρC D Au|u|. As a starting point a strongly simplified model is investigated, where products of mixed velocity components appear [2]: m + m uu 0 0 0 m + m vv m vr 0 m rv I z + m rr ˙ u ˙ v ˙ r = mrv + X H + X R + X P -mru + Y H + Y R N H + N R , where X H = 1 2 ρL pp T X 0 u 0 |u 0 | u|u| + X 0 βγ L pp vr , Y H = 1 2 ρL pp T Y 0 β |u|v + Y 0 γ L pp ur + Y 0 β |β | v |v | + Y 0 γ |γ | L 2 pp r |r | + Y 0 β |γ | L pp v |r | + Y 0 |β |γ L pp |v |r + Y 0 ab |u a y v b y | sgn(v )V -a y -b y +2 , N H = 1 2 ρL 2 pp T N 0 β uv + N 0 γ L pp r |u| + N 0 u 0 γc L c n pp |ur c n |V -c n +1 sgn(r )+ N 0 γ |γ | r |r |L 2 pp + N 0 β |β | v |v | + N 0 ββγ rv 2 L pp V -1 + N 0 βγγ vr 2 L 2 pp V -1 sgn(u)+ N 0 ab |u a n v b n |V -a n -b n +2 sgn (uv ) . Inspired by this model we study a general non-smooth 2D system of ODEs, analyzing its Hopf bifurcation and the conditions for sub- and supercriticality. Basic Bifurcation Theory Example of the influence of the absolute value in a 1D system undergoing a pitchfork bifurcation: ˙ u = μu + σu 3 m u s = -1 m u s = 1 Pitchfork bifurcation ˙ u = μu + σu|u| m u s = -1 u m s = 1 Degenerated pitchfork bifurcation Notice that the supercriticality is given for σ = -1 while the subcriticality for σ =1. The green lines correspond to stable points and the red dotted lines to unstable ones. It is well known, [3], that any generic smooth 2D system undergoing a Hopf bifurcation has the following normal form in polar coordinates: ( ˙ r = μr + σr 3 , ˙ ϕ = ω, where σ is called the first Lyapunov coefficient and μ and ω 6=0 are the parameters of the system. In the smooth case σ can be computed from a 2D vector field. Then the sub/supercriticality of the Hopf bifurcation is given by the sign of this coefficient. For the non-smooth case the Lyapunov coefficient can not be computed in this way due to the lack of differentiability. Consequently, new results have been derived in order to identify such bifurcations. Theorem (1st part): Consider the following system: ( ˙ u = μu - ωv - f (u, |u|,v, |v |) , ˙ v = ωu + μv - g (u, |u|,v, |v |) , (1) where f (u, |u|,v, |v |)= a 11 u|u| + a 12 u|v | + a 21 v |u| + a 22 v |v |, g (u, |u|,v, |v |)= b 11 u|u| + b 12 u|v | + b 21 v |u| + b 22 v |v |. If σ # := 2a 11 + a 12 + b 21 +2b 22 6=0, then there exists a Hopf bifurcation in μ where the amplitude of the locally unique limit cycle is r = 3π 2σ # μ + O μ 2 , where u = r cos ϕ, v = r sin ϕ. The Hopf bifurcation is then subcritical if sgn(σ # ) < 0 and supercriti- cal if sgn(σ # ) > 0. Let us compare σ # with the first Lyapunov coefficient of a smooth version of (1) with the same symmetry by setting f (u, |u|,v, |v |) 7→ f ( u, u 2 ,v,v 2 ) and g (u, |u|,v, |v |) 7→ g ( u, u 2 ,v,v 2 ) : σ smooth = 1 4ω (3a 11 + a 12 + b 21 +3b 22 ) . There is a qualitatively distinction between both coefficients (not just a scalar variation) and generally sgn(σ # ) 6= sgn(σ smooth ). Whence, the sub/supercriticality can not simply be generalized from the smooth case in this way. Theorem (2nd part): If σ # =0 but α := ∑ ( c ik a ij b kh + d ik a ij a kh + s ik b ij b kh ) 6=0, with c ik ,d ik ,s ik certain constants, then there also occurs a bifurcation of a periodic solution in μ where the amplitude of the unique limit cycle follows r = r - πω α μ + O (μ) . The sub/supercriticality is given by sgn(α). One could also compare α with the second Lyapunov coefficient [4]. Note that the periodic branch is O (1/2) while in the smooth case is O (1/4). Theorem (3rd part): If σ # 6=0, then the same results hold for the more general system with quadratic and cubic terms ( ˙ u = μu - ωv - f (u, |u|,v, |v |)+ f q (u, v )+ f c ( u, u 2 ,v,v 2 ) , ˙ v = ωu + μv - g (u, |u|,v, |v |)+ g q (u, v )+ g c ( u, u 2 ,v,v 2 ) . In particular, f q , g q , f c and g c do not change σ # . Poincar´ e Map We use polar coordinates and introduce a new time parametrization to the system (1). We also perform the Taylor expansion to get the following system: r 0 := dr dϕ = μr -r 2 F (ϕ) ω +r Ω(ϕ) = μ ω r - r 2 F (ϕ) ω + μΩ(ϕ) ω 2 + O(r 3 ), ϕ 0 := dϕ dϕ =1, (2) where F (ϕ)= F (cos ϕ, |cos ϕ|, sin ϕ, |sin ϕ|) and Ω(ϕ) = Ω(cos ϕ, |cos ϕ|, sin ϕ, |sin ϕ|). We study the full dynamics by computing the Poincar ´ e map. Since the system is non-smooth (absolute values), one computes four expressions (one for each quadrant), as it is shown in the following picture. u v r 4 r (4; r ) 1 1 ~ r (4; r ) 2 2 ~ r (4; r ) 3 3 ~ r (4; r ) 0 0 ~ r 0 r 1 r 2 r 0 r 3 Afterwards one composes these expressions to get the Poincar´ e map ˜ r 3 (2π ; r 0 ). The Poincar ´ e section is defined as S = {(u, 0) | u ∈ R >0 } and the initial condition is (ϕ, r ) = (0,r 0 ). We write then ˜ r i (ϕ; r i )= α 1,i (ϕ)r i + α 2,i (ϕ)r 2 i + O(r 3 i ) (3) since ˜ r i (ϕ; 0) = 0 ∀i ∈{0,..., 3} holds. With the corresponding initial conditions one computes α 1,i (ϕ) and α 2,i (ϕ) substituting (3) in r 0 of (2), and solving the resulting expression. Finally, one calculates r 3 in terms of r 0 . Then, the next iteration of r 0 is given by ˜ r 3 (2π ; r 0 )=¯ r 0 . The periodic orbit of the original system (1) corresponds to the smallest positive solution (due to the leading order term) of r * =˜ r 3 (2π ; r * ) , which is approximately the one obtained by the theorem. The sub/supercriticality is investigated as always, which certainly coincides with the result of the theorem. Forthcoming Research Theorem in 3D: the variables of the initial model (1) will be related to degrees of freedom of a vessel and the system will be extended to a 3D model in order to compare results with [2]. To consider certain maneuvers as boundary value problems. To add control (multi-objective optimization). ← for the straight motion there exist already results for stability References [1] T. I. Fossen. Handbook of Marine Craft Hydrodynamics and Motion Control. John Wily & Sons, 2011. [2] M. Apri, N. Banagaaya, J. B. van den Berg, R. Brussee, D. Bourne, T. Fatima, F. Irzal, J. Rademacher, B. Rink, F. Veerman and S. Verpoort. Analysis of a Model for Ship Maneuvering. Proc. 79th Europ. Study Group ”Mathematics and Industry” Vrije Univ. Amst., pages 83-116, 2011. [3] Y. A. Kuznetsov. Elements of Applied Bifurcation Theory, Second Edition. Springer, New York (U.S.A), 1998. [4] J. Guckenheimer and Y. A. Kuznetsov (2007), Scholarpedia, 2(5):1853. http://www.scholarpedia.org/ article/Bautin_bifurcation
Transcript of Analysis of bifurcations in non-smooth dynamical systems ...Inspired by this model we study a...

Analysis of bifurcations in non-smooth dynamical systems withapplications to ship maneuvering
Research GroupApplied Analysis
Pattern formation
www.anan.math.uni-bremen.de
Spectral theory
Dynamical systems
Funded by Deutsche Forschungsgemeinschaft (RTG π3 project R2-3)
Miriam Steinherr Zazo & Prof. Dr. Jens Rademacher
University of BremenFaculty of Mathematics and Computer Science
AbstractA general system of non-smooth equations, motivated by models for ship maneuvering, has been analyzed. In
particular, a two dimensional system of ODEs with non-smoothnesses of the type |ui|uj has been investigated. Atheorem has been obtained providing the existence of a Hopf bifurcation for specific conditions for the coefficientsmultiplying the non-smooth terms. Furthermore, some results regarding sub- and supercriticality are presented.
Motivation and Marine Craft ModelingA marine craft must perform certain maneuvers in order to be certified. Therefore, vessel modelsare examined in simulations, which involve mathematical analysis. The prediction of maneuveringproperties of ships is a fundamental problem in their design.
The vectorial representation of the rigid-body equations of motion is Mν = F (ν), where• ν is the velocity and ν is its time derivative.•M is the matrix with the added mass coefficients and the moments of inertia.• F contains the Coriolis term and the contribution forces from the hull, the rudder and the propeller,
as well as the hydrodynamic forces.The hydrodynamic forces can be modeled employing second-order modulus terms [1], which aremotivated by the drag equation for high-enough Reynolds number: FD = −1
2ρCDAu|u|.
As a starting point a strongly simplified model is investigated, where products of mixed velocitycomponents appear [2]:m + muu 0 0
0 m + mvv mvr
0 mrv Iz + mrr
uvr
=
mrv + XH + XR + XP−mru + YH + YR
NH + NR
, where
XH =1
2ρLppT
(X ′u′|u′|u|u| + X ′βγLppv r
),
YH =1
2ρLppT
(Y ′β|u|v + Y ′γLppur + Y ′β|β|v|v| + Y ′γ|γ|L
2ppr|r| + Y ′β|γ|Lppv|r| + Y ′|β|γLpp|v|r + Y ′ab |uayvby| sgn(v)V −ay−by+2
),
NH =1
2ρL2
ppT(N ′βuv + N ′γLppr|u| + N ′u′γcL
cnpp|urcn|V −cn+1 sgn(r) + N ′γ|γ|r|r|L2
pp + N ′β|β|v|v| + N ′ββγr v2LppV
−1
+ N ′βγγv r2L2ppV
−1 sgn(u) + N ′ab|uanvbn|V −an−bn+2 sgn (uv)).
Inspired by this model we study a general non-smooth 2D system of ODEs, analyzing its Hopfbifurcation and the conditions for sub- and supercriticality.
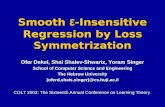
Basic Bifurcation TheoryExample of the influence of the absolute value in a 1D system undergoing a pitchfork bifurcation:
u = µu + σu3
m
u
s = -1
m
u
s = 1
Pitchfork bifurcation
u = µu + σu|u|
m
u
s = -1
u
m
s = 1
Degenerated pitchfork bifurcation
Notice that the supercriticality is given for σ = −1 while the subcriticality for σ = 1. The green linescorrespond to stable points and the red dotted lines to unstable ones.
It is well known, [3], that any generic smooth 2D system undergoing a Hopf bifurcation has thefollowing normal form in polar coordinates:
r = µr + σr3,
ϕ = ω,
where σ is called the first Lyapunov coefficient and µ and ω 6= 0 are the parameters of the system. Inthe smooth case σ can be computed from a 2D vector field. Then the sub/supercriticality of the Hopfbifurcation is given by the sign of this coefficient.
For the non-smooth case the Lyapunov coefficient can not be computed in this way due to the lack ofdifferentiability. Consequently, new results have been derived in order to identify such bifurcations.
Theorem (1st part):
Consider the following system:u = µu− ωv − f (u, |u|, v, |v|) ,v = ωu + µv − g (u, |u|, v, |v|) ,
(1)
where
f (u, |u|, v, |v|) = a11u|u| + a12u|v| + a21v|u| + a22v|v|,g (u, |u|, v, |v|) = b11u|u| + b12u|v| + b21v|u| + b22v|v|.
If σ# := 2a11 + a12 + b21 + 2b22 6= 0, then there exists a Hopf bifurcation in µ where the amplitude ofthe locally unique limit cycle is
r =3π
2σ#
µ +O(µ2),
where u = r cosϕ, v = r sinϕ. The Hopf bifurcation is then subcritical if sgn(σ#) < 0 and supercriti-cal if sgn(σ#) > 0.
Let us compare σ# with the first Lyapunov coefficient of a smooth version of (1) with the samesymmetry by setting f (u, |u|, v, |v|) 7→ f
(u, u2, v, v2
)and g (u, |u|, v, |v|) 7→ g
(u, u2, v, v2
):
σsmooth =1
4ω(3a11 + a12 + b21 + 3b22) .
There is a qualitatively distinction between both coefficients (not just a scalar variation) and generallysgn(σ#) 6= sgn(σsmooth). Whence, the sub/supercriticality can not simply be generalized from thesmooth case in this way.
Theorem (2nd part):
If σ# = 0 but α :=∑(
cikaijbkh + dikaijakh + sikbijbkh)6= 0, with cik, dik, sik certain constants,
then there also occurs a bifurcation of a periodic solution in µ where the amplitude of the unique limitcycle follows
r =
√−πωαµ +O (µ) .
The sub/supercriticality is given by sgn(α).
One could also compare α with the second Lyapunov coefficient [4].Note that the periodic branch is O (1/2) while in the smooth case is O (1/4).
Theorem (3rd part):
If σ# 6= 0, then the same results hold for the more general system with quadratic and cubic termsu = µu− ωv − f (u, |u|, v, |v|) + fq (u, v) + fc
(u, u2, v, v2
),
v = ωu + µv − g (u, |u|, v, |v|) + gq (u, v) + gc(u, u2, v, v2
).
In particular, fq, gq, fc and gc do not change σ#.
Poincare MapWe use polar coordinates and introduce a new time parametrization to the system (1). We also performthe Taylor expansion to get the following system:r′ := dr
dϕ =µr−r2F (ϕ)ω+rΩ(ϕ)
= µωr − r
2(F (ϕ)ω +
µΩ(ϕ)ω2
)+O(r3),
ϕ′ := dϕdϕ = 1,
(2)
where F (ϕ) = F (cosϕ, |cosϕ|, sinϕ, |sinϕ|) and Ω(ϕ) = Ω(cosϕ, |cosϕ|, sinϕ, |sinϕ|).
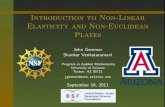
We study the full dynamics by computing the Poincare map. Since the system is non-smooth (absolutevalues), one computes four expressions (one for each quadrant), as it is shown in the following picture.
u
v
r4
r (4; r )11~
r (4; r )22~ r (4; r )33
~
r (4; r )00~
r 0
r 1
r 2 r 0
r3
Afterwards one composes these expressions to get thePoincare map r3 (2π; r0).The Poincare section is defined as S = (u, 0) | u ∈ R>0and the initial condition is (ϕ, r) = (0, r0).We write then
ri(ϕ; ri) = α1,i(ϕ)ri + α2,i(ϕ)r2i +O(r3
i ) (3)
since ri(ϕ; 0) = 0 ∀i ∈ 0, . . . , 3 holds.
With the corresponding initial conditions one computes α1,i(ϕ) and α2,i(ϕ) substituting (3) in r′ of (2),and solving the resulting expression. Finally, one calculates r3 in terms of r0. Then, the next iterationof r0 is given by r3 (2π; r0) = r0.
The periodic orbit of the original system (1) corresponds to the smallest positive solution (due to theleading order term) of
r∗ = r3 (2π; r∗) ,
which is approximately the one obtained by the theorem. The sub/supercriticality is investigated asalways, which certainly coincides with the result of the theorem.
Forthcoming Research Theorem in 3D: the variables of the initial model (1) will be related to degrees of freedom of a vessel
and the system will be extended to a 3D model in order to compare results with [2]. To consider certain maneuvers as boundary value problems. To add control (multi-objective optimization). ← for the straight motion there exist already results for stability
References[1] T. I. Fossen. Handbook of Marine Craft Hydrodynamics and Motion Control. John Wily & Sons, 2011.
[2] M. Apri, N. Banagaaya, J. B. van den Berg, R. Brussee, D. Bourne, T. Fatima, F. Irzal, J. Rademacher, B. Rink, F.Veerman and S. Verpoort. Analysis of a Model for Ship Maneuvering. Proc. 79th Europ. Study Group ”Mathematicsand Industry” Vrije Univ. Amst., pages 83-116, 2011.
[3] Y. A. Kuznetsov. Elements of Applied Bifurcation Theory, Second Edition. Springer, New York (U.S.A), 1998.
[4] J. Guckenheimer and Y. A. Kuznetsov (2007), Scholarpedia, 2(5):1853. http://www.scholarpedia.org/article/Bautin_bifurcation