A Linear Regulator with Fast Digital Control for Biasing of Integrated DC-DC Converters A-VLSI class...
21
A Linear Regulator with Fast Digital Control for Biasing of Integrated DC-DC Converters A-VLSI class presentation Adopted from isscc Presented by: Siamak Mehrnami
-
Upload
barry-lucas -
Category
Documents
-
view
218 -
download
1
Transcript of A Linear Regulator with Fast Digital Control for Biasing of Integrated DC-DC Converters A-VLSI class...

A Linear Regulator with Fast Digital Control for Biasing of Integrated
DC-DC Converters
A-VLSI class presentationAdopted from isscc
Presented by:
Siamak Mehrnami

2
Outline
● Integrated DC-DC converters
● Linear regulator with digital control
● Implementation details
● measurements
● Conclusions

3
Integrated DC-DC Converters
● Demonstrated at 100MHz, η=87.7%
Ref.: [3]

4
Problem: Low Input Voltage
● The CMOS process limits the DC-DC converter input voltage to 1.2-1.4V
Ref: [1]

5
Doubling of Input Voltage Range
● VIN is across two transistors in series
● Need a ½-rail linear regulator
Ref.: [4]

6
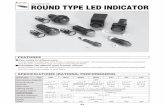
High tension power delivery through implicit voltage conversion ref:[2]
16-by-16multiplier
16-by-16multiplier
Linearregulator
1 to 3levelshift
3 to 1levelshift
3VDD
Vhigh
Vlow
1-logic 3-logic 3-logic 1-logic
16-by-16multiplier
1 to 2levelshift
2 to 1levelshift
1-logic 2-logic 2-logic 1-logic
Linearregulator
Vhigh
Vlow
1-logic 1-logic
2VDD
VDD
2VDD system 3VDD system
16-by-16multiplier
16-by-16multiplier
Linearregulator
1 to 2levelshift
2 to 1levelshift
2VDD
Vhigh
Vlow
1-logic 2-logic 2-logic 1-logic
VDD
1-logic 1-logic

7
Auxiliary Regulator Requirements
● Calculate Figure of Merit– single value to measure performance Ref:[1]

8
Auxiliary Regulator Figure of Merit
● Best known regulator had FOM=22ps– Rajapandian, et al., 2005 ISSCC, p. 298
● Need same speed at 3X lower power ref:[1]

9
Traditional Linear Regulators
● Class-A buffer has poor slew rate● Class-AB buffer degrades stability ref:[1]

10
Regulator with Digital Control
● Digital buffers (inverters) are perfect class-AB circuits, fast and low power
ref:[1]

11
Push-Pull ½-Rail Regulatorref:[1]

12
Template Cell Design for Matching
ref:[1]

13
Customized Inverter Cells
ref:[1]

14
Floorplan of Matched Invertersref:[1]

15
Regulator Test Chip in 90nm CMOSref:[1]

16
Input-Output DC Characteristicref:[1]

17
Output DC Characteristicref:[1]

18
Load Step Response (5ns/div)ref:[1]

19
Performance Comparisonref:[1]

20
Conclusions
● Digital buffers (inverters) are more power-efficient than analog buffers
● Achieved 3.64X lower quiescent current at 28% slower response– FOM is 2.84X better than the prior art
● The power bottleneck moved from the analog buffer to the error amplifier– matching requirements influence
transistor sizes and the quiescent current ref:[1]

21
References:● 1-P.Hazucha, “A Linear Regulator With
Fast Digital Control For Biasing Integrated DC-DC Converters” ISSCC dig. tech. papers 29.2 feb.2006
● 2-S. Rajapandian, et al., “High-Tension Power Delivery- Operating 0.18µm CMOS Digital Logic at 5.4v,” ISSCC dig. Tech. papers,pp.298299,Feb., 2005 [page 6]
● 3- Hazucha, et al.,2004 VLSI Symposium, p. 256.
● 4-Xiao, et al.,2004 ISSCC, p. 280.