A Brief Introduction to Magnetotellurics and Controlled ...
75
A Brief Introduction to Magnetotellurics and Controlled Source Electromagnetic Methods Frank Morrison U.C. Berkeley With the help of: David Alumbaugh Erika Gasperikova Mike Hoversten Andrea Zirilli
Transcript of A Brief Introduction to Magnetotellurics and Controlled ...

A Brief Introduction to Magnetotellurics andControlled Source Electromagnetic Methods
Frank Morrison U.C. Berkeley
With the help of:
David AlumbaughErika Gasperikova
Mike HoverstenAndrea Zirilli

A few equations for MT and CSEM
Ohm’s Law: EJ σ= ED ε=
tEE
∂∂
+= εσtDJH
∂∂
+=×∇Ampere’s Law:
For most rocks and for frequencies less than 1.0 MHztEE
∂∂
⟩⟩ εσ
tHE 0 ∂
∂−=×∇ µFaraday’s Law:
These equations may be combined to yield:
0tEE 0
2 =∂∂
−∇ σµ A diffusion equation


The MT Method
The ratio of electric (E) to magnetic (H) fields at a frequency ω is related to the resistivity of the ground by:
E Z (impedance)iρωµ= =H
2E1aρ =From which:
Hωµ
L
VVL
Ex =Jx
Hy (t)

The fields at the surface attenuate rapidly as they diffuse downward.
0He0H
δThe depth at which they fall to 1/e their value at the surface is the skin depth, δ.
µσω2 ρδ = = 500
f

Low frequencies penetrate more deeply than high frequencies, so ρA calculated from a range of frequencies produces a “sounding”.
ρ high
ρ low
ρ high
ρa
Frequency

y
Strik
e di
rect
ion
2-D
stru
ctur
eTE (YX)
TM (XY)
xProfile direction
TM mode: ZXY = EX/HY
TE mode: ZYX = EY/HX

In general the impedance is a tensor. The tensor can be diagonalized over a 2-D structure into the principal TE and TM modes.

)(H)(Z)(H)(Z)(E
)(H)(Z)(H)(Z)(E
yyyxyxy
yxyxxxx
ωω+ωω=ω
ωω+ωω=ω
y
x
yyyx
xyxx
y
x
HH
ZZZZ
EE
⋅=

The vertical contact illustrates some basic behavior of TE and TM modes and the role of boundary conditions in the results.
Tangential E and H must be continuous.Normal J must be continuous and so normal E must be discontinuous.Consequently the TE mode apparent resistivity must varysmoothly across the contact while the TM mode is discontinuous.Also because there can be no vertical current then
forces Hy to be constant for the TM modefor 2-D models. All the apparent resistivity response is from variations in E.
tDJH
∂∂
+=×∇

-2000 0 2000Distance (m)
1
10
100
1000
App
aren
t Res
istiv
ity (O
hm-m
)
TM-response
TE-response
-2000 0 2000 (meters)
100 Ohm-m10 Ohm-m
0
1000
Dep
th (m
)
Vertical contact

Vertical contact - TM response

Vertical contact - TE response

The apparent resistivity, and the phase between E and H, for both modes are normally plottedvs. frequency and horizontal location.These sections have a useful relationship to the actual resistivity variations and are more intuitively satisfying than the impedances themselves. They show:
For a conductive dike: The TE mode shows the result of the increased currentflow in the dike which causes an increased magnetic field over the dike. At low frequenciesthe effect goes away. The TM mode shows almost no response; the effect of a thin conductivezone normal to current flow is negligible.
For a resistive dike: The TE mode shows no response. The dike has no effecton currents flowing parallel to it. The TM mode has essentially no inductive response athigh frequencies but does reveal the essentially dc blocking effect of the dike at low frequencywhen current is forced to flow up and over the dike. Again, H is constant over the dike, the only response is from E.
A general rule for thin resistive layers is that they only have a useful response whenthe current is normal to them, and conductive layers only when the current is parallel. Thus,resistive horizontal layers in a sedimentary section are relatively invisible in MT soundings.

100 m 10 Ohm-m
50 m 1 Ohm-m
100 Ohm-m
100 m 10 Ohm-m
100 Ohm-m
-2000 -1000 0 1000 2000Distance (m)
Freq
uenc
y (H
z)
Resitivity (Ohm-m)
1000
100
10
1
0.1
0.01
0.001
100
30
10
3
1
-2000 -1000 0 1000 2000Distance (m)
Freq
uenc
y (H
z)
-155
-150
-145
-140
-135
Phase (deg)
1000
100
10
1
0.1
0.01
0.001
TE response of conductive dike

100 m 10 Ohm-m
50 m 1 Ohm-m
100 Ohm-m
100 m 10 Ohm-m
100 Ohm-m
-2000 -1000 0 1000 2000Distance (m)
Freq
uenc
y (H
z)
25
30
35
40
45
Phase (deg)
1000
100
10
1
0.1
0.01
0.001
-2000 -1000 0 1000 2000Distance (m)
Freq
uenc
y (H
z)
Resitivity (Ohm-m)
1000
100
10
1
0.1
0.01
0.001
100
30
10
3
1
TM response of conductive dike

100 m 10 Ohm-m
50 m 1000 Ohm-m
100 Ohm-m
100 m 10 Ohm-m
50 m 1000 Ohm-m
100 Ohm-m
100 m 10 Ohm-m
50 m 1000 Ohm-m
100 Ohm-m
-2000 -1000 0 1000 2000Distance (m)
Freq
uenc
y (H
z)
-155
-150
-145
-140
-135
Phase (deg)
1000
100
10
1
0.1
0.01
0.001
-2000 -1000 0 1000 2000Distance (m)
Freq
uenc
y (H
z)
Resitivity (Ohm-m)
1000
100
10
1
0.1
0.01
0.001
1000
100
300
30
10
TE response of resistive dike

100 m 10 Ohm-m
50 m 1000 Ohm-m
100 Ohm-m
-2000 -1000 0 1000 2000Distance (m)
Freq
uenc
y (H
z)
Resitivity (Ohm-m)
1000
100
10
1
0.1
0.01
0.001
1000
100
300
30
10
-2000 -1000 0 1000 2000Distance (m)
Freq
uenc
y (H
z)25
30
35
40
45
Phase (deg)
1000
100
10
1
0.1
0.01
0.001
TM response of resistive dike

MT and CSEM data are interpreted by the process of inversion:1) A model is chosen to represent the subsurface resistivity
distribution.2) The parameters of the model are systematically varied in
a numerical calculation of the response of the em system to the modeluntil the numerical ‘data’ match the observed data.
A common generic model is the representation of the resistivitydistribution by a discrete volume element grid or mesh:
ijσ

Smooth vs. Sharp InversionSmooth vs. Sharp Inversion
ρijBoundary 2
Boundary 3
ρ2, j-1 ρ
2, j ρ2, j+1
Node jNode j-1
Node j+1
ρ3, j-1
ρ3,j
ρ3,j+1
•• Smooth inversion Smooth inversion -- smoothing on smoothing on ρ ρ of adjacent cellsof adjacent cells•• Sharp inversion Sharp inversion -- smoothing on node z & lateral smoothing on node z & lateral ρ ρ within a within a
regionregion

3D View of Gemini Salt Structure

MMT Survey Line
Shaded Area Represents Salt Thickness > 500m

Occam TM-mode Inversion

SBI TM-mode Inversion

The MT response over the well known Eloise ore body in Australia is an excellent example of the behavior of the TE and TM modes over a buried vertical conductive body.

0 500 1000Distance (m)
0
20
6010
0.1
1
0.01
Freq
uenc
y (H
z)
Resistivity (Ohm-m)
100 0 500 1000
Distance (m)
0
20
40
60
10
0.1
1
0.01
Freq
uenc
y (H
z)
Phase (deg
100
Eloise - TM response

0 500 1000Distance (m)
0
20
6010
0.1
1
0.01
Freq
uenc
y (H
z)
Resistivity (Ohm-m)
100
0 500 1000Distance (m)
188
200
212
22410
0.1
1
0.01 Fr
eque
ncy
(Hz)
Phase (deg
100
Eloise - TE response

0 500 1000Distance (m)
-1000
-500
0
Dep
th (m
)
0
20
60
Resistivity (Ohm-m)
Eloise - RRI TM & TE Inversion

Controlled Source EM(CSEM)

Controlled source methods usually employ either two current electrodes, an electric dipole, or a loop of current carrying wire, a magnetic dipole. In the following figure the changing magnetic field from a horizontal loop source induces horizontal loop currents in the ground. As we have seen these currents would be unaffected by a thin horizontal resistive layer but would respond to a thin conductive layer. The electric dipole produces largely vertical current flow at dc and low frequency. As the frequency increasesthe changing magnetic field of the injected current produces counter fields which oppose the inducing fields and have the effect of distorting the current pattern and forcing it closer to the surface (see current flow vectors in later slide). The thin resistive layer has a big effect on the response because it blocks the vertical current flow.

Magnetic and Electric Sources for CSEM
+I –I
Current
Current Loop
B field line
Current

Magnetic and Electric Sourceswith thin resistive layer
Current Loop
B field line
Current
+I –I

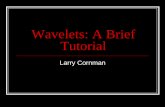
The response of a submerged electric dipole is described by the superposition of the source dipole and an image dipole located an equal distance above the interface. In the following slide the figure on the left shows the Ex fields as a transmitter comes closer to the surface from within a uniform conducting half space. At depth we see the initial 1/R3 falloff transitioning to the exponential falloff as induction kicks in (with a little image effect at the greatest separation). As the dipole approaches the surface the image dipole acts to increase the subsurface fields and so to lessen their fall-off until we get to the halfspace fall off when the depth is zero. The second figure on the rightshows the modification to the response when there is an ocean layer over a slightly more resistive bottom. The shape of the decay is modified but the general halfspace-image dipole character is unchanged.
The second figure also shows the distortion in the E response, for a seawater layer of 1.0 km, caused by a resistive layer in the ocean bottom.

E-field amplitude as a function of offset

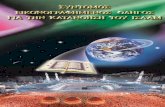
The effects of the thin resistive layer can be summarized in plots of the percentage change in the field caused by the introduction of the layer as a function of frequency and transmitter-receiver offset for a given depth of sea water.

Percent difference in E-field w/without resistive layer
2000 6000 10000 14000 18000Offset, r (m)
Freq
uenc
y (H
z)
% Difference -30 0 30 60 90 120 150 180
10
1
0.1
0.01
0.001
100 m 10 Ohm-m1 km 0.3 Ohm-m
1 km 1 Ohm-m
1 Ohm-m
50 m 100 Ohm-m
T r Ex

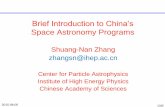
Current flow vectorsSea water over half space
0.3 Ohm-m 1.0 km
0.7 Ohm-m

f=1x10-3 Hz

f=1x10-2 Hz

f=2.15x10-2 Hz

f=4.64x10-2 Hz

f=1x10-1 Hz

f=2.15x10-1 Hz

f=4.64x10-1 Hz

f=1Hz

Current flow vectorsSea water over half space
with resistive layer
0.3 Ohm-m 1.0 km
0.7 Ohm-m
100 Ohm-m50 m

f=1x10-3 Hz

f=1x10-2 Hz

f=2.15x10-2 Hz

f=4.64x10-2 Hz

f=1x10-1 Hz

f=2.15x10-1 Hz

f=4.64x10-1 Hz

f=1Hz

Comparison of current flow vectors without and with resistive layer

f=1x10-6 Hz

f=1x10-6 Hz

f=1x10-3 Hz

f=1x10-3 Hz

f=1x10-2 Hz

f=1x10-2 Hz

f=2.15x10-2 Hz

f=2.15x10-2 Hz

f=4.64x10-2 Hz

f=4.64x10-2 Hz

f=1x10-1 Hz

f=1x10-1 Hz

f=2.15x10-1 Hz

f=2.15x10-1 Hz

f=4.64x10-1 Hz

f=4.64x10-1 Hz

f=1Hz

f=1Hz


A few References
Chave, A. D., Constable, S. C. and Edwards, R. N., 1991, Electrical exploration methods for the seafloor: in Nabighian, M. N., Ed., Electromagnetic methods in applied geophysics, 02, Soc. of Expl. Geophys., 931-966
Constable, S.C., Orange, A., Hoversten, G.M., and Morrison, H.F., 1998, Marine magnetotellurics for petroleum exploration, part 1 : A marine equipment system: Geophysics, 63, 816-825
Hoversten,G. M., Morrison, H.F., and Constable, S.C., 1998, Marine magnetotellurics for petroleum exploration, part 2: Numerical analysis of subsaltresolution: Geophysics, 63, 826-840
Hoversten, G.M., Constable, S., and Morrison, H.F., 2000, Marinemagnetotellurics for base salt mapping: Gulf of Mexico field test at the Geministructure: Geophysics, 65, 1476-1488
Smith,T., Hoversten, M., Gasperikova, E., and Morrison, H.F., 1998, Sharp Boundary Inversion of 2D Magnetotelluric Data: Geophysical Prospecting, 47,469-486