5 Electric Motor
13
1 ME20013 Syst ems and Control 5. ELECTRIC MOTOR POSITION CONTROL CASE STUDY
description
SYSTEMS AND CONTROLUNIVERSITY OF BATH LECTURE NOTES2ND YEAR MECHANICAL ENGINEERING
Transcript of 5 Electric Motor
7/18/2019 5 Electric Motor
http://slidepdf.com/reader/full/5-electric-motor 1/13
1
ME20013 Systems and Control
5. ELECTRIC MOTOR POSITION CONTROL
CASE STUDY
7/18/2019 5 Electric Motor
http://slidepdf.com/reader/full/5-electric-motor 2/13
2
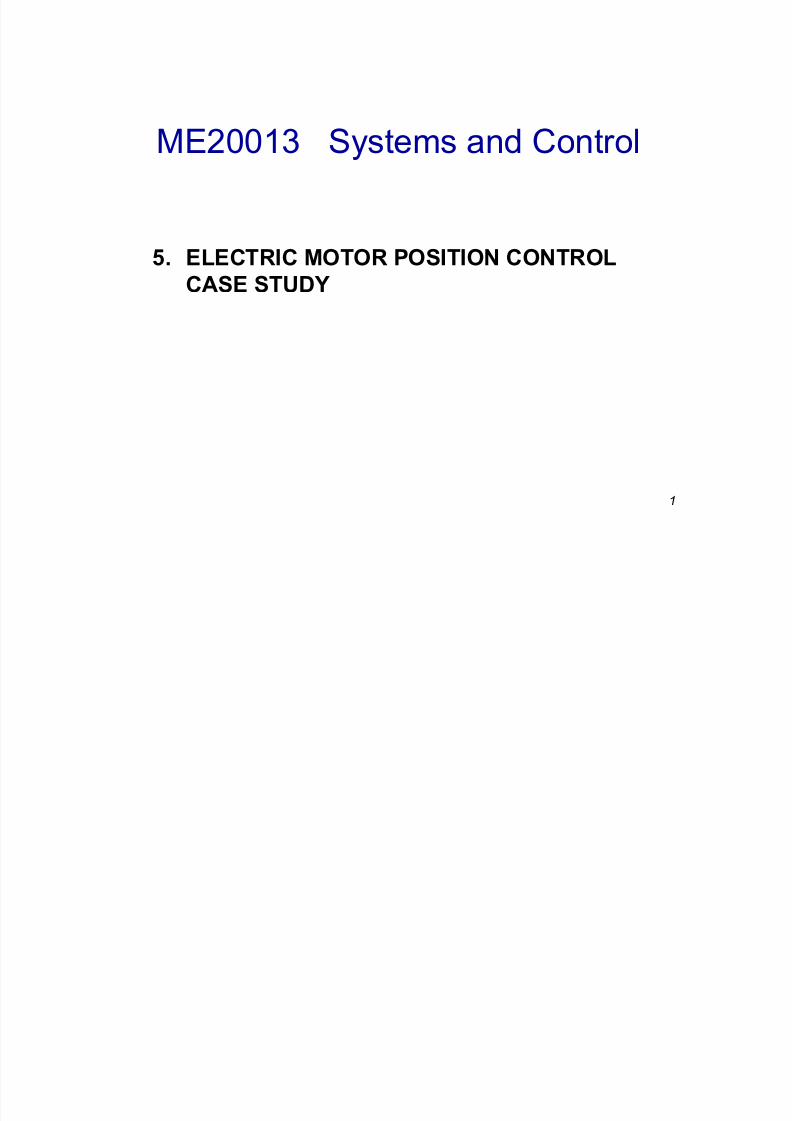
DC Motor
Encoder
Power amplifier
PIC Microcontroller
Inertial load
Encoder interface
7/18/2019 5 Electric Motor
http://slidepdf.com/reader/full/5-electric-motor 3/13
3
7/18/2019 5 Electric Motor
http://slidepdf.com/reader/full/5-electric-motor 4/13
4
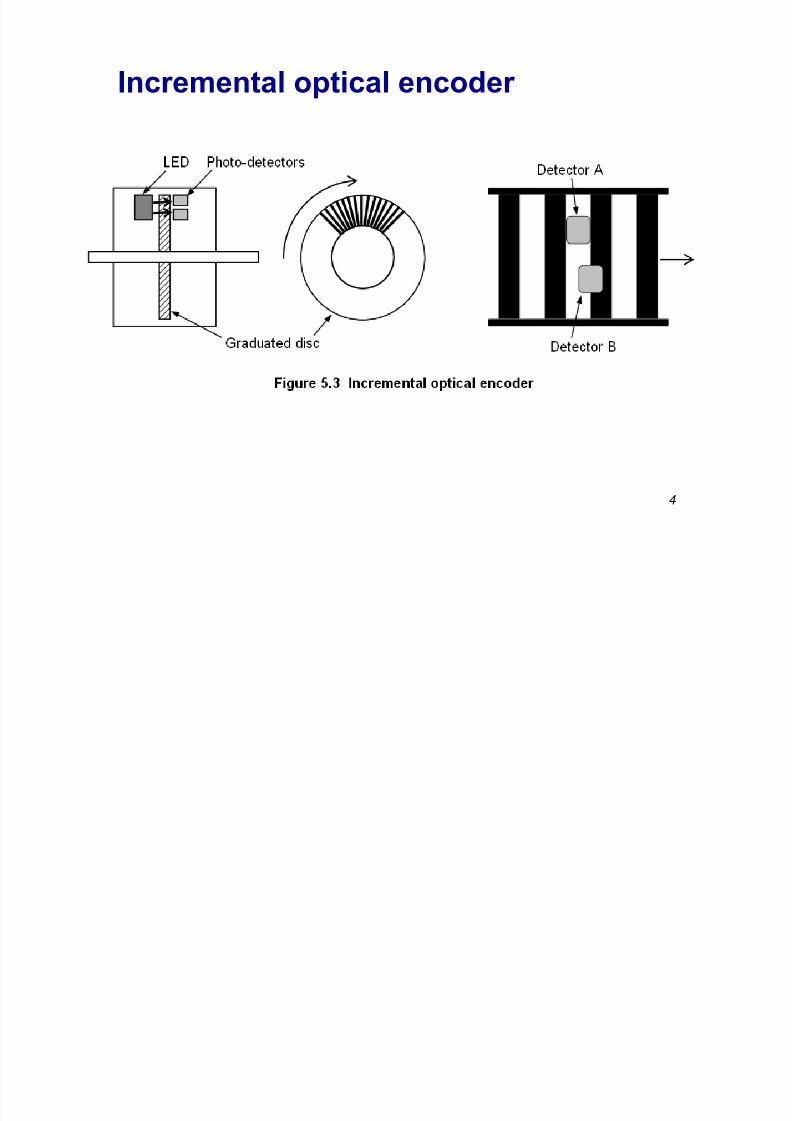
Incremental optical encoder
7/18/2019 5 Electric Motor
http://slidepdf.com/reader/full/5-electric-motor 5/13
5
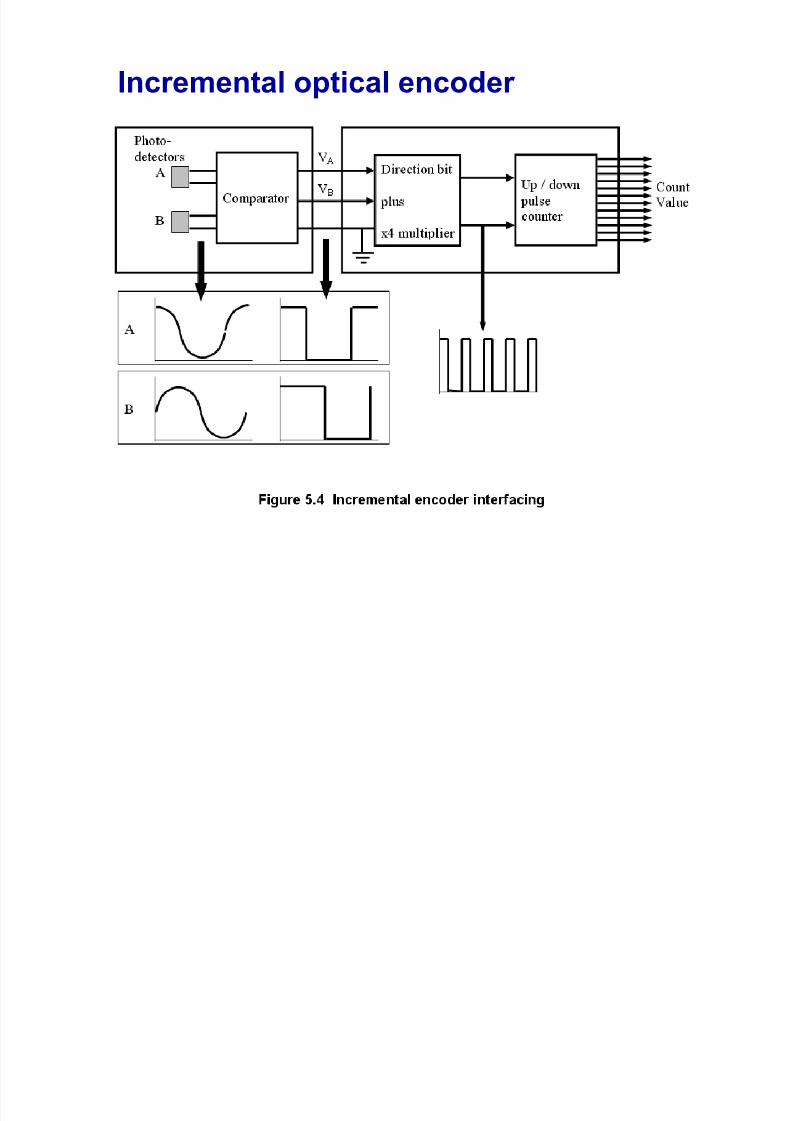
Incremental optical encoder
7/18/2019 5 Electric Motor
http://slidepdf.com/reader/full/5-electric-motor 6/13
6
7/18/2019 5 Electric Motor
http://slidepdf.com/reader/full/5-electric-motor 7/13
7
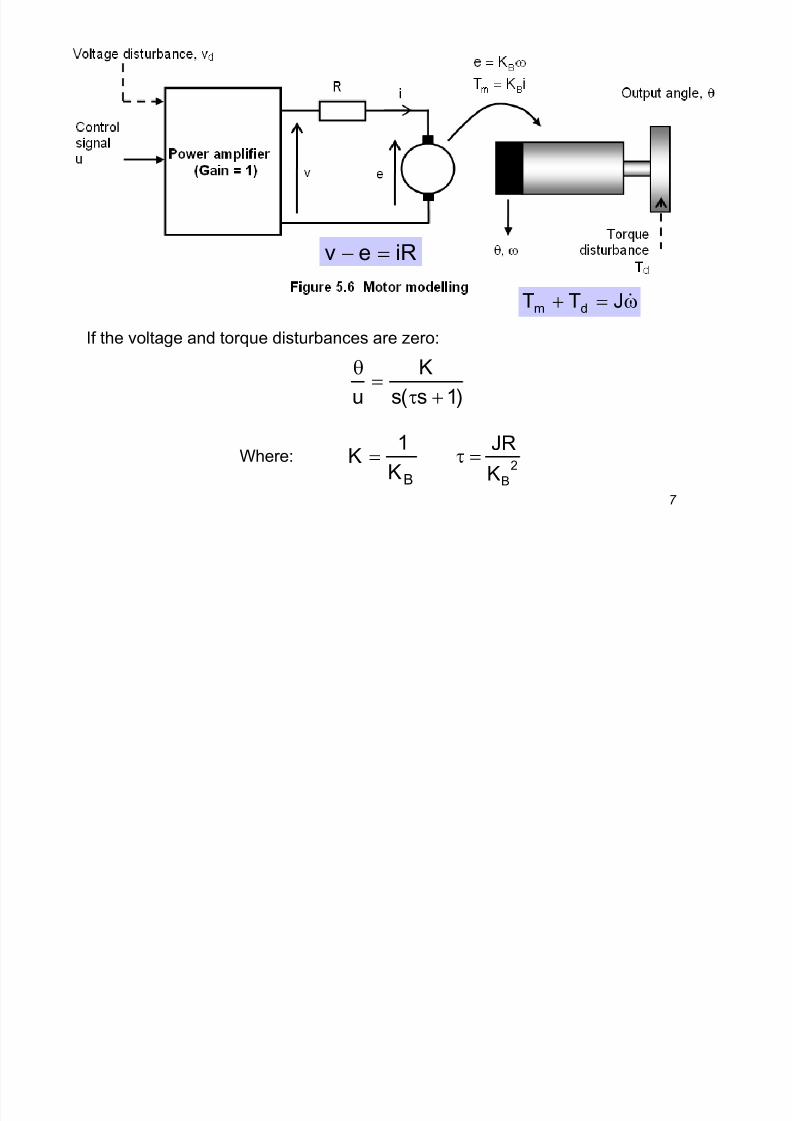
iRev =−
ω=+ JTT dm
)1s(s
K
u +τ=
θ
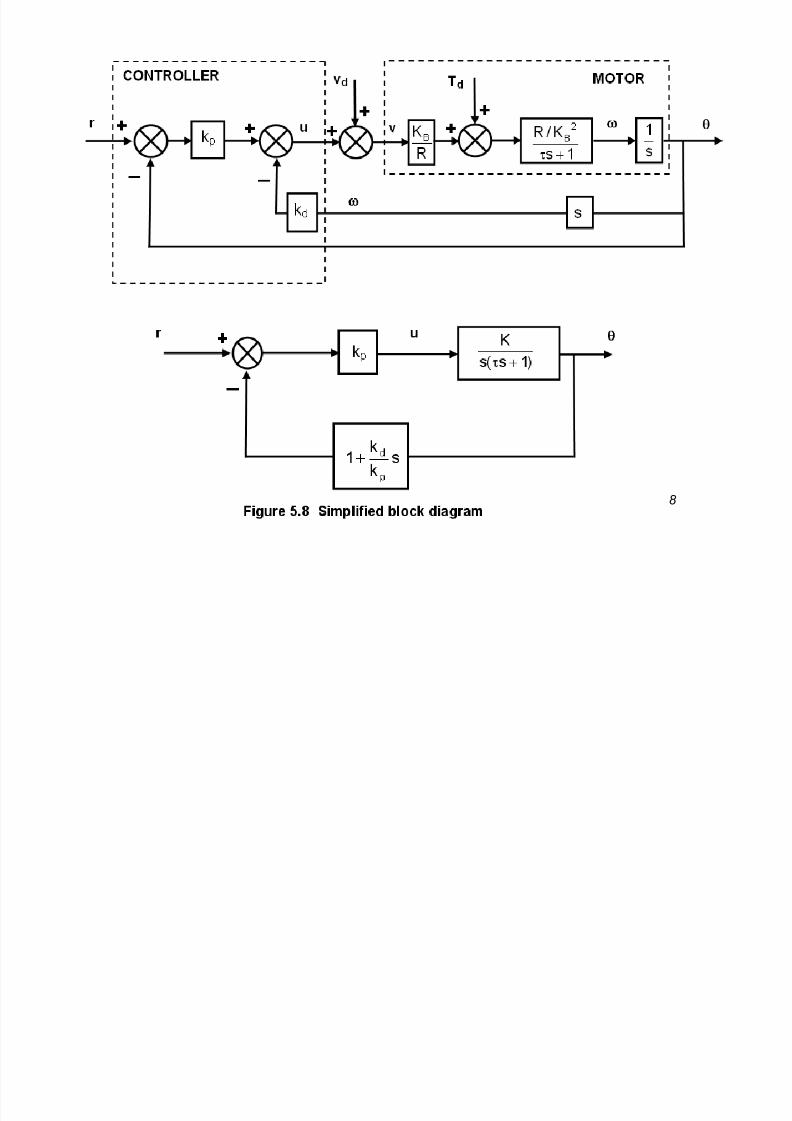
If the voltage and torque disturbances are zero:
BK
1K =
2
BK
JR=τWhere:
7/18/2019 5 Electric Motor
http://slidepdf.com/reader/full/5-electric-motor 8/13
8
The controller structure is called a derivative feedback or velocity
feedback controller. The controller gains are:
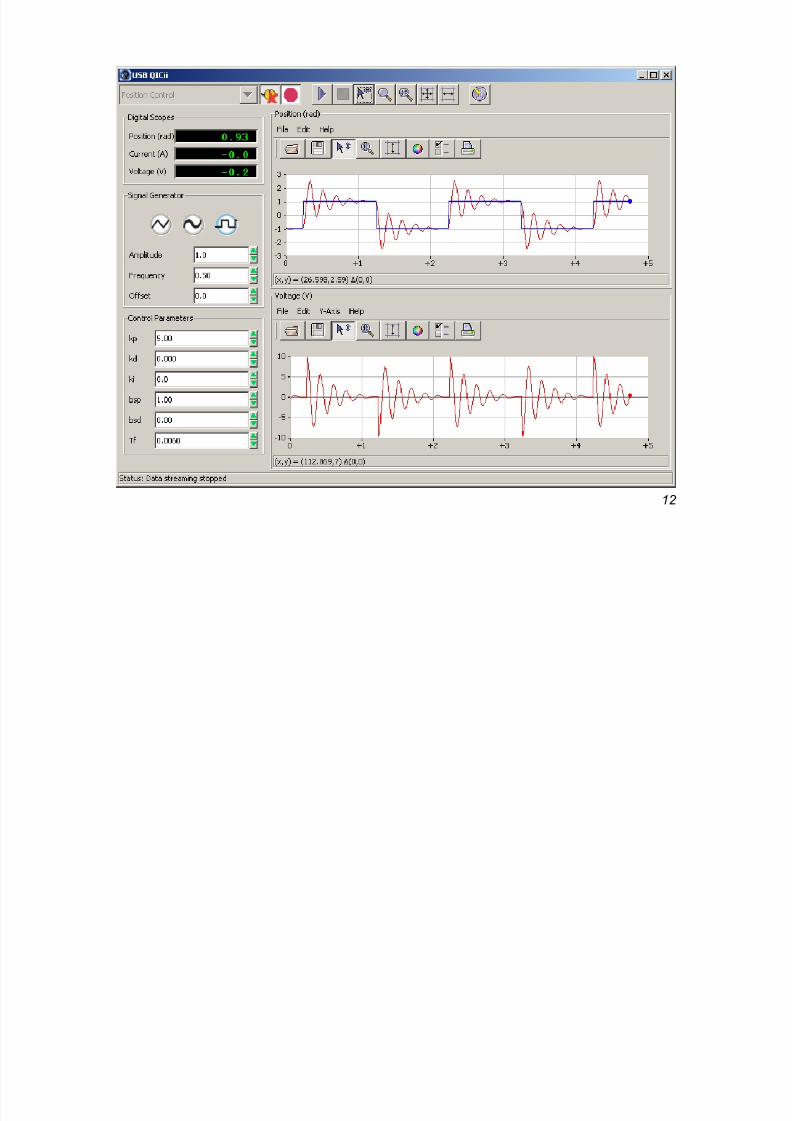
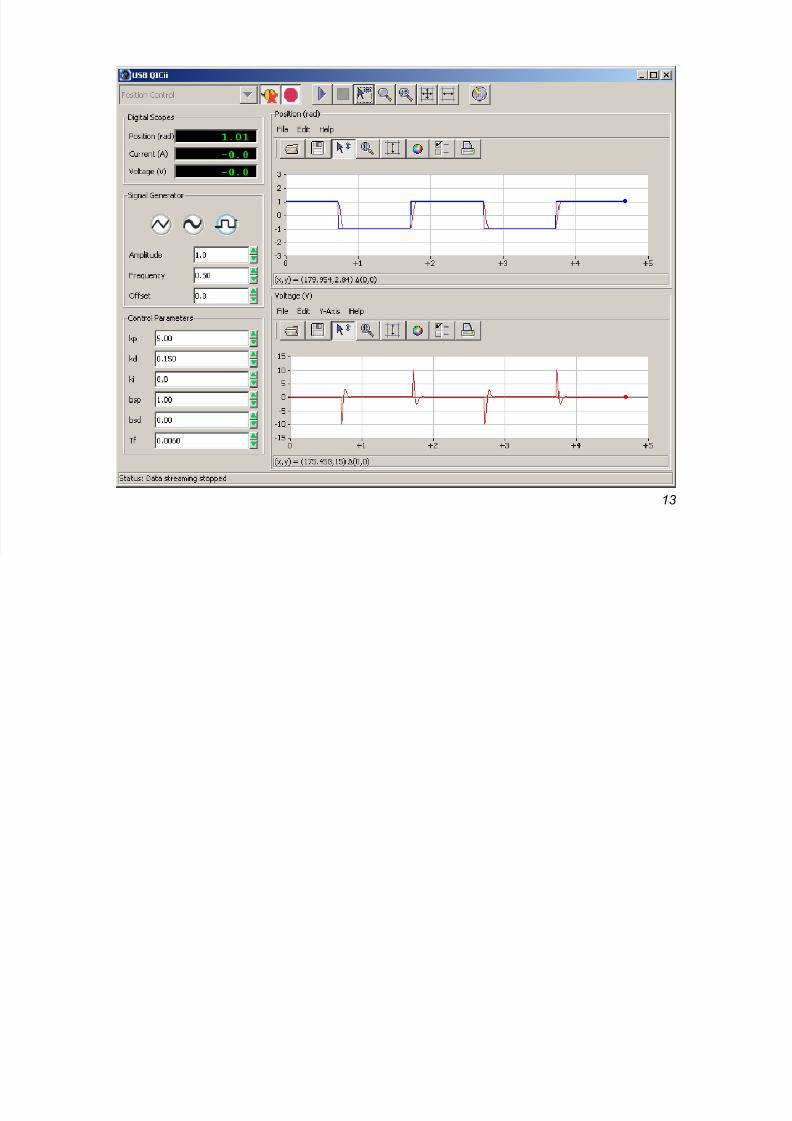
•Proportional gain, kp
•Velocity gain, kd

7/18/2019 5 Electric Motor
http://slidepdf.com/reader/full/5-electric-motor 9/13
9
τ+τ
++
τ=
θ
Kk
s)Kk1(
s
/Kk
r pd2
p
Closed loop transfer function:
2nn
2
2n
s2s
k
r ω+ςω+
ω=
θ
Compare with standard form for second order lag:

7/18/2019 5 Electric Motor
http://slidepdf.com/reader/full/5-electric-motor 10/13
10

7/18/2019 5 Electric Motor
http://slidepdf.com/reader/full/5-electric-motor 11/13
11
7/18/2019 5 Electric Motor
http://slidepdf.com/reader/full/5-electric-motor 12/13
12
7/18/2019 5 Electric Motor
http://slidepdf.com/reader/full/5-electric-motor 13/13
13

![Part6.2 Electrical Motor [Kompatibilitätsmodus] · Source: International Electrotechnical Commission (IEC) and motor suppliers data. ... Rating factors for motor power: Nameplate](https://static.fdocument.org/doc/165x107/5b7d4b587f8b9a9d078d0e60/part62-electrical-motor-kompatibilitaetsmodus-source-international-electrotechnical.jpg)