3D Printing in Robotics
27
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3D Εκτύπωση & Εφαρμογές στη Ρομποτική Φώτης Δημέας Μηχανολόγος Μηχανικός - Υποψήφιος Διδάκτορας Τμήμα Μηχανολόγων Μηχανικών & Αεροναυπηγών Πανεπιστήμιο Πατρών [email protected] Μουσείο Επιστημών & Τεχνολογίας 18 Μαρτίου 2014
-
Upload
fotios-dimeas -
Category
Technology
-
view
324 -
download
3
Transcript of 3D Printing in Robotics

..........
.....
.....................................................................
.....
......
.....
.....
.
3D Εκτύπωση & Εφαρμογές στη Ρομποτική
Φώτης Δημέας
Μηχανολόγος Μηχανικός - Υποψήφιος ΔιδάκτοραςΤμήμα Μηχανολόγων Μηχανικών & Αεροναυπηγών
Πανεπιστήμιο Πατρών[email protected]
Μουσείο Επιστημών & Τεχνολογίας18 Μαρτίου 2014

..........
.....
.....................................................................
.....
......
.....
.....
.
Περιεχόμενα
Περί 3D εκτύπωσης
Εφαρμογές στη Λέσχη Ρομποτικής
Γενικές εφαρμογές στη ρομποτική

..........
.....
.....................................................................
.....
......
.....
.....
.
“Προσθετική παραγωγή και 3D εκτύπωση οδηγούν προςτην τρίτη βιομηχανική επανάσταση.”
— The Economist

..........
.....
.....................................................................
.....
......
.....
.....
.
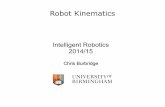
Thingiverse Trend
... ..2008.
2009.
2010.
2011.
2012.
2013.
2014.0 .
0.5
.
1
.
1.5
.
2
.
2.5
.
·105

..........
.....
.....................................................................
.....
......
.....
.....
.
Αξίζει η επένδυση;
Κόστος RepRap: 600€
Σενάριο 1 (Οικιακή χρήση)Χρήση: 1 κομμάτι την εβδομάδα.Περίοδος αποπληρωμής: 4 μήνεςΑπόδοση επένδυσης (ROI) σε 3-5 χρόνια: >200%
Σενάριο 2 (Εργαστηριακή χρήση)Χρήση: 1 κομμάτι τη μέραΠερίοδος αποπληρωμής: ≥1 ημέραROI σε 3-5 χρόνια: >1000%
Life-cycle economic analysis of distributed manufacturing with open-source3-D printers, B.T. Wittbrodt et. al, Mechatronics, Elsevier, 2013

..........
.....
.....................................................................
.....
......
.....
.....
.
Περιεχόμενα
Περί 3D εκτύπωσης
Εφαρμογές στη Λέσχη Ρομποτικής
Γενικές εφαρμογές στη ρομποτική

..........
.....
.....................................................................
.....
......
.....
.....
.
Η Λέσχη Ρομποτικής
▶ Λειτουργία από το 2002 στο τμήμαΜηχανολόγων Μηχανικών παράλληλα με τηνΕρευνητική Ομάδα Ρομποτικής υπό τηνυποστήριξη του καθ. Ν. Ασπράγκαθου.
▶ Σχεδιασμός, κατασκευή & προγραμματισμόςαυτοκινούμενων και βιομηχανικών ρομπότ -μηχανισμών
▶ Παρουσιάσεις, workshops, συμμετοχή σεσυνέδρια - διαγωνισμούς

..........
.....
.....................................................................
.....
......
.....
.....
.
Polymechanon
Αυτόνομο ρομπότ έρευνας και διάσωσης σε αστικό περιβάλλον(Robocup Rescue)

..........
.....
.....................................................................
.....
......
.....
.....
.
Polymechanon

..........
.....
.....................................................................
.....
......
.....
.....
.
Polymechanon

..........
.....
.....................................................................
.....
......
.....
.....
.
Polymechanon
▶ 1 στα 3 μηχανικά εξαρτήματα προέκυψε στον 3D εκτυπωτή▶ Κόστος 3D εξαρτημάτων σε σχέση με συμβατικέςκατεργασίες: 1/10
▶ Απόσβεση του 3D εκτυπωτή σε 1 εβδομάδα▶ Το κέρδος από τα 3D κομμάτια αξιοποιήθηκε σε άλλεςλειτουργίες του ρομπότ

..........
.....
.....................................................................
.....
......
.....
.....
.
Δρομέας (line following)
Ρομπότ αυτόνομης πλοήγησης σε γραμμή. Συμμετοχή στο ITURobot Olympics

..........
.....
.....................................................................
.....
......
.....
.....
.
Δρομέας (line following)

..........
.....
.....................................................................
.....
......
.....
.....
.
Quadcopter
Αυτόνομη πλοήγηση σε εσωτερικό & εξωτερικό περιβάλλον

..........
.....
.....................................................................
.....
......
.....
.....
.
Quadcopter

..........
.....
.....................................................................
.....
......
.....
.....
.
Quadcopter
Κόστος πλαισίου: 10€

..........
.....
.....................................................................
.....
......
.....
.....
.
Rocker Bogie
6-τροχο ρομποτικό όχημα για ανώμαλα εδάφη

..........
.....
.....................................................................
.....
......
.....
.....
.
Rocker Bogie

..........
.....
.....................................................................
.....
......
.....
.....
.
Ρομποτική αρπάγη
Gripper για χειρισμό εύκαμπτων αντικειμένων (υφασμάτων)

..........
.....
.....................................................................
.....
......
.....
.....
.
Ρομποτική αρπάγη

..........
.....
.....................................................................
.....
......
.....
.....
.
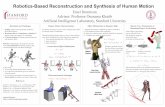
Ρομποτική αρπάγη φράουλας
Συγκομιδή φράουλας με ρομπότ

..........
.....
.....................................................................
.....
......
.....
.....
.
Ρομποτική αρπάγη φράουλας
Κόστος υλικού: 5€

..........
.....
.....................................................................
.....
......
.....
.....
.
Ρομποτική αρπάγη φράουλας
Δημοσιεύσεις:▶ Fotios Dimeas, Dhionis Sako, VassilisMoulianitis, and Nikos Aspragathos. Designand fuzzy control of a robotic gripper forefficient strawberry harvesting (υπόδημοσίευση). Robotica, 2014
▶ Fotios Dimeas, Dhionis Sako, VassilisMoulianitis, and Nikos Aspragathos. Towardsdesigning a robot gripper for efficientstrawberry harvesting. In RAAD 2013

..........
.....
.....................................................................
.....
......
.....
.....
.
Περιεχόμενα
Περί 3D εκτύπωσης
Εφαρμογές στη Λέσχη Ρομποτικής
Γενικές εφαρμογές στη ρομποτική

..........
.....
.....................................................................
.....
......
.....
.....
.
Λοιπές εφαρμογές
▶ Αυτοκινούμενα ρομπότ και τμήματα αυτών▶ Ανθρωποειδή ρομπότ▶ Προσθετική τεχνητών μελών▶ Self-repairing robots

..........
.....
.....................................................................
.....
......
.....
.....
.
Αξία ενός 3D εξαρτήματος
Ρομπότ: 100.000€Αισθητήρας: 2.000€
Σχεδίαση και εκτύπωση 3D εξαρτήματος για τη σύνδεση μέσασε λίγες ώρες: Αξία ανεκτίμητη

..........
.....
.....................................................................
.....
......
.....
.....
.
Σας ευχαριστώ!
robotics.mech.upatras.gr/club
/Polymechanon Team -Λέσχη Ρομποτικής