1.1. Vectors A u juj - Pennsylvania State · PDF file1.1. Vectors (Continued) 1.1.1....
5
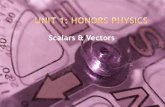
1.1. Vectors (Continued) 1.1.1. Projection of a vector A onto an axis u: |u| = 1. Definition: Proj u A =(|A| cos φ)u. Here φ represents the angle between the two vectors A and u. Figure 1.1.7. Projections with acute and obtuse angles. A u Proj A A u Proj u A Figure 1.1.7. Projections with acute and obtuse angles. φ u If φ is between -π/2 and π/2, then the cos is positive and the projection is in the same direction as u. If φ is between π/2 and 3π/2, the projection is in the opposite direction. We see that if u 1 and u 2 are orthogonal axes, the projection can be used to decompose A: A = Proj u 1 A + Proj u 2 A. For a general nonzero vector B, the projection onto B is Proj B A =(|A| cos φ) B |B| . 1.1.2. Inner product. (a.k.a. scalar product, dot product) Example. Let A = (1, -1, 2), B = (2, 3, -5). Then A · B =1 · 2+(-1) · 3+2 · (-5) = -11. In general, for any two vectors A = a 1 i 1 + a 2 i 2 + a 3 i 3 , B = b 1 i 1 + b 2 i 2 + b 3 i 3 , the inner product is given by A · B = a 1 b 1 + a 2 b 2 + a 3 b 3 . (1)
-
Upload
nguyennguyet -
Category
Documents
-
view
216 -
download
3
Transcript of 1.1. Vectors A u juj - Pennsylvania State · PDF file1.1. Vectors (Continued) 1.1.1....

1.1. Vectors (Continued)
1.1.1. Projection of a vector A onto an axis u: |u| = 1.
Definition: ProjuA = (|A| cos φ)u.
Here φ represents the angle between the two vectors A and u.
Figure 1.1.7. Projections with acute and obtuse angles.
A
u Proj
A
Au
ProjuA
Figure 1.1.7. Projections with acute and obtuse angles.
φ
u
If φ is between −π/2 and π/2, then the cos is positive and the projection is in the
same direction as u. If φ is between π/2 and 3π/2, the projection is in the opposite
direction.
We see that if u1 and u2 are orthogonal axes, the projection can be used to
decompose A:
A = Proju1A + Proju2
A.
For a general nonzero vector B, the projection onto B is
ProjBA = (|A| cos φ)B|B| .
1.1.2. Inner product. (a.k.a. scalar product, dot product)
Example. Let A = (1,−1, 2), B = (2, 3,−5). Then
A ·B = 1 · 2 + (−1) · 3 + 2 · (−5) = −11.
In general, for any two vectors A = a1i1 + a2i2 + a3i3, B = b1i1 + b2i2 + b3i3,
the inner product is given by
A ·B = a1b1 + a2b2 + a3b3. (1)

Properties: A ·B = B ·A, (2A) ·B = 2(A ·B).
Distributive law: A · (B + C) = A ·B + A ·C.Now let us examine an example. Let
i1 = (1, 0, 0), i2 = (0, 1, 0), i3 = (0, 0, 1).
Then,i1 · i1 = 1, i2 · i2 = 1, i3 · i3 = 1,
i1 · i2 = 0, i1 · i3 = 0, i2 · i3 = 0.(2)
If a set of vectors satisfies (2), then the set is called orthonormal. Conditions (2) are
called orthonormal conditions.
Recall the law of cosine from High School trig course:
c2 = a2 + b2 − 2ab cosφ,
where φ is the angle that faces the side c in a triangle with side lengths a, b, c.
Now look at Figure 1.1.8: (Angle and inner product.)
A
Figure 1.1.8. Angle and inner product.
(A, B)B
B−A
Let us use the law of cosine for a = |A|, b = |B|, c = |B−A| in Figure 1.1.8. Do
the calculationc2 = |B−A|2 = (B−A) · (B−A)
= |B|2 + |A|2 − 2B ·A.(3)
Then we see that
A ·B = |A||B| cos(A,B) (4)
where (A,B) is now used to denote the angle between A and B. Although the
inner product in (1) is simple and direct, formula (4) is also a popular, equivalent
definition.
The inner product can be used to express the projection. Formula:
ProjBA =A ·B|B|2 B. (5)
2

We give a one line proof for the formula (5):
ProjBA = (|A| cos φ)B|B| = (|A||B| cos φ)
B|B|2 = (A ·B)
B|B|2 .
Now we see that A and B is orthogonal (defined as φ = ±π/2) if and only if
A ·B = 0, and if and only if ProjBA = 0.
1.1.3. Vector product (a.k.a cross product)
Given two vectors A and B. We define the vector product of A and B to be
a vector C:
C = A×B
where
1. The length of C is the area of the parallelogram spanned by A and B:
|C| = |A||B|| sin(A,B)|;
2. The direction of C is perpendicular to the plane formed by A and B. And
the three vectors A, B, and C follow the right-hand rule. (It will follow the left-
hand rule if the coordinate system is left-handed. We shall always use right-handed
coordinate systems.)
The right-hand rule is: when the four fingers of the right hand turn from A to
B, the thumb points to the direction of C.
(Figure 1.1.3.1. Definition of cross product.)
A
B
C=AxB
Figure 1.1.3.1. Definition of cross product.
Area
Right hand rule
Properties:
A×B = −B×A;
3

A× (B + C) = A×B + A×C;
A‖B is the same as A×B = 0
where the symbol ‖ means parallel.
Example 1.1.3a: Recall the three vectors i1, i2, i3. They follow the right hand
rule. By definition we can find that
i1 × i1 = 0, i2 × i2 = 0, i3 × i3 = 0;
and
i1 × i2 = i3, i2 × i3 = i1, i3 × i1 = i2.
With Example 1.1.3a and the distributive property, we can find a formula for
the product. Let
A = a1i1 + a2i2 + a3i3, B = b1i1 + b2i2 + b3i3.
Then (please do it on your own. you can do it.)
A×B =
∣∣∣∣∣∣∣∣∣i1 i2 i3a1 a2 a3
b1 b2 b3
∣∣∣∣∣∣∣∣∣ .Example 1.1.3b. An electric charge e moving with velocity v in a magnetic
field H experiences a force:
F =e
c(v ×H)
where c is the speed of light.
Example 1.1.3c. The moment M of a force F about a point O is
M = r× F.
(Figure 1.1.3.2. Moment of a force.)
4

Figure 1.1.3.2. The moment of a force.
r
F
M
O
—End of Lecture 2 —
5




![Common hypercyclic vectors for certain families of differential … · 2018-01-12 · arXiv:1506.05241v1 [math.FA] 17 Jun 2015 Common hypercyclic vectors for certain families of](https://static.fdocument.org/doc/165x107/5e2bcf883708263682251b0d/common-hypercyclic-vectors-for-certain-families-of-diierential-2018-01-12-arxiv150605241v1.jpg)