Lecture 27. Relativity of transverse waves and 4-vectors · 2013-10-17 · Relativity of transverse...
27
Lecture 27. Relativity of transverse waves and 4-vectors (Ch. 2-5 of Unit 2 4.05.12) Introducing per-spacetime 4-vector (ω 0 ,ω x ,ω y ,ω z ) =(ω,ck x ,ck y ,ck z ) transformation Reviewing the stellar aberration angle σ vs. rapidity ρ in Epstein’s cosmic speedometer † Reviewing “Sin-Tan Rosetta” geometry Reviewing relativistic quantum Lagrangian-Hamiltonian contact relations Epstein’s space-proper-time (x,cτ) plots (“c-tau” plots) † Time contraction-dilation revisited Length contraction-dilation revisited Twin-paradox revisited Velocity addition revisited Lorentz symmetry effects How it makes momentum and energy be conserved † Lewis Carroll Epstein, Relativity Visualized Insight Press, San Francisco, CA 94107 See also: L. C. Epstein, Thinking Physics Press, Insight Press, San Francisco, CA 94107 1 Thursday, April 5, 2012
Transcript of Lecture 27. Relativity of transverse waves and 4-vectors · 2013-10-17 · Relativity of transverse...
Lecture 27. Relativity of transverse waves and 4-vectors
(Ch. 2-5 of Unit 2 4.05.12)
Introducing per-spacetime 4-vector (ω0,ωx,ωy,ωz) =(ω,ckx,cky,ckz) transformationReviewing the stellar aberration angle σ vs. rapidity ρ in Epstein’s cosmic speedometer†
Reviewing “Sin-Tan Rosetta” geometry Reviewing relativistic quantum Lagrangian-Hamiltonian contact relations
Epstein’s space-proper-time (x,cτ) plots (“c-tau” plots)†
Time contraction-dilation revisitedLength contraction-dilation revisitedTwin-paradox revisitedVelocity addition revisited
Lorentz symmetry effectsHow it makes momentum and energy be conserved
†Lewis Carroll Epstein, Relativity Visualized Insight Press, San Francisco, CA 94107
See also: L. C. Epstein, Thinking Physics Press, Insight Press, San Francisco, CA 94107
1Thursday, April 5, 2012
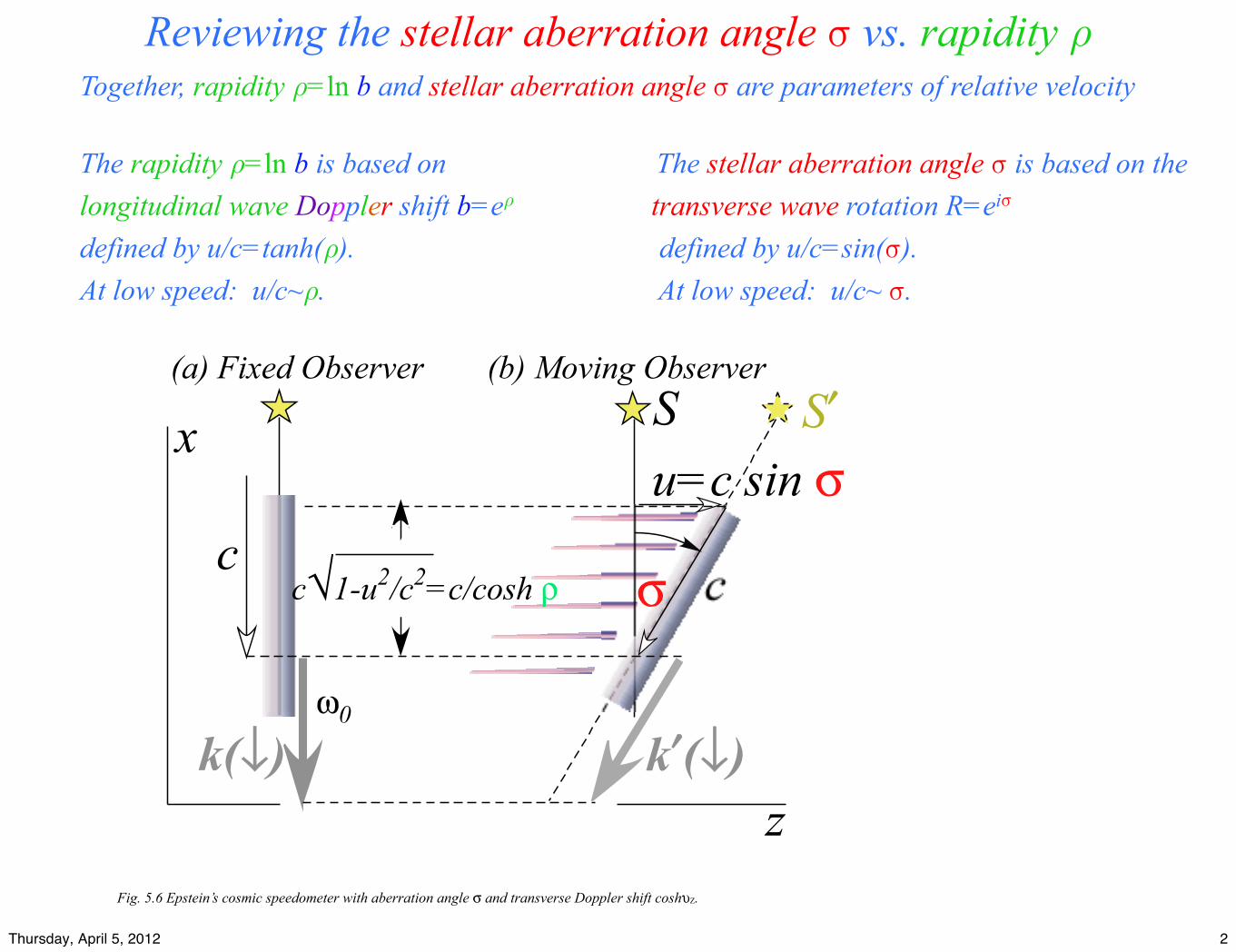
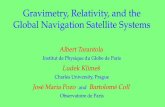
Fig. 5.6 Epstein’s cosmic speedometer with aberration angle σ and transverse Doppler shift coshυZ.
Reviewing the stellar aberration angle σ vs. rapidity ρ Together, rapidity ρ=ln b and stellar aberration angle σ are parameters of relative velocity
The rapidity ρ=ln b is based on The stellar aberration angle σ is based on the longitudinal wave Doppler shift b=eρ transverse wave rotation R=eiσ defined by u/c=tanh(ρ). defined by u/c=sin(σ).At low speed: u/c~ρ. At low speed: u/c~ σ.
u=c sin σ
c
δδ
S S′(a) Fixed Observer (b) Moving Observer
σ
k(↓) k′(↓)
c√1-u2/c2=c/cosh ρ
ω0
c
z
x
2Thursday, April 5, 2012
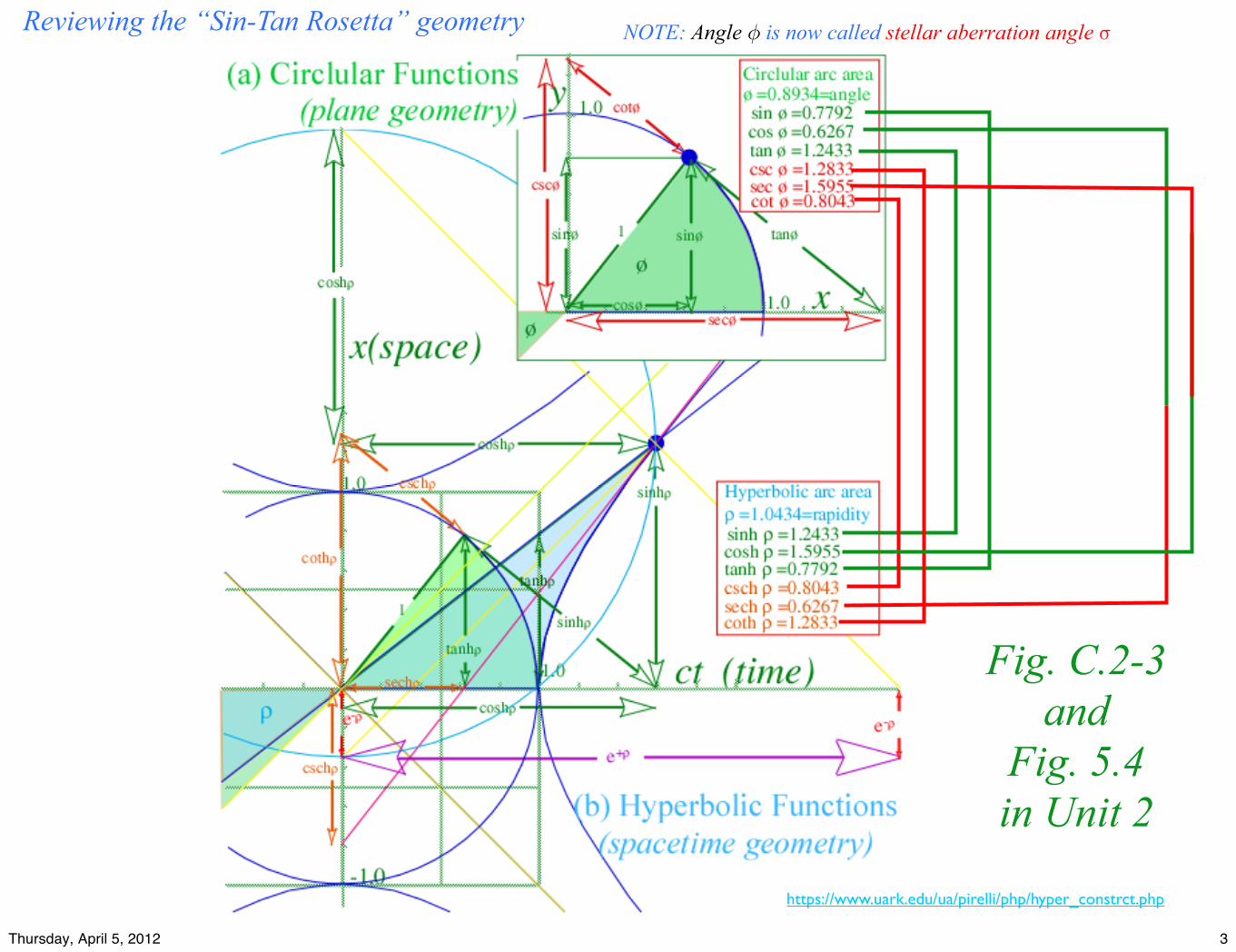
Reviewing the “Sin-Tan Rosetta” geometry
https://www.uark.edu/ua/pirelli/php/hyper_constrct.php
NOTE: Angle φ is now called stellar aberration angle σ
Fig. C.2-3and
Fig. 5.4in Unit 2
3Thursday, April 5, 2012
ρ
ρHHaammiillttoonniiaann ==HH ==BB ccoosshh ρ
--LLaaggrraannggiiaann
--LL ==BB sseecchh ρRReesstt
EEnneerrggyy
BB ==MMcc22
HH
BB
--LL
VVeelloocciittyy aabbeerrrraattiioonn
aannggllee φ
33−
433221100--11
4
--22
BB ccoosshh ρ
BB ee--ρcp
H=E
BB
BB ee++ρ
BB sseecchh ρ
22
11
BBlluuee sshhiiffttRReedd sshhiifftt
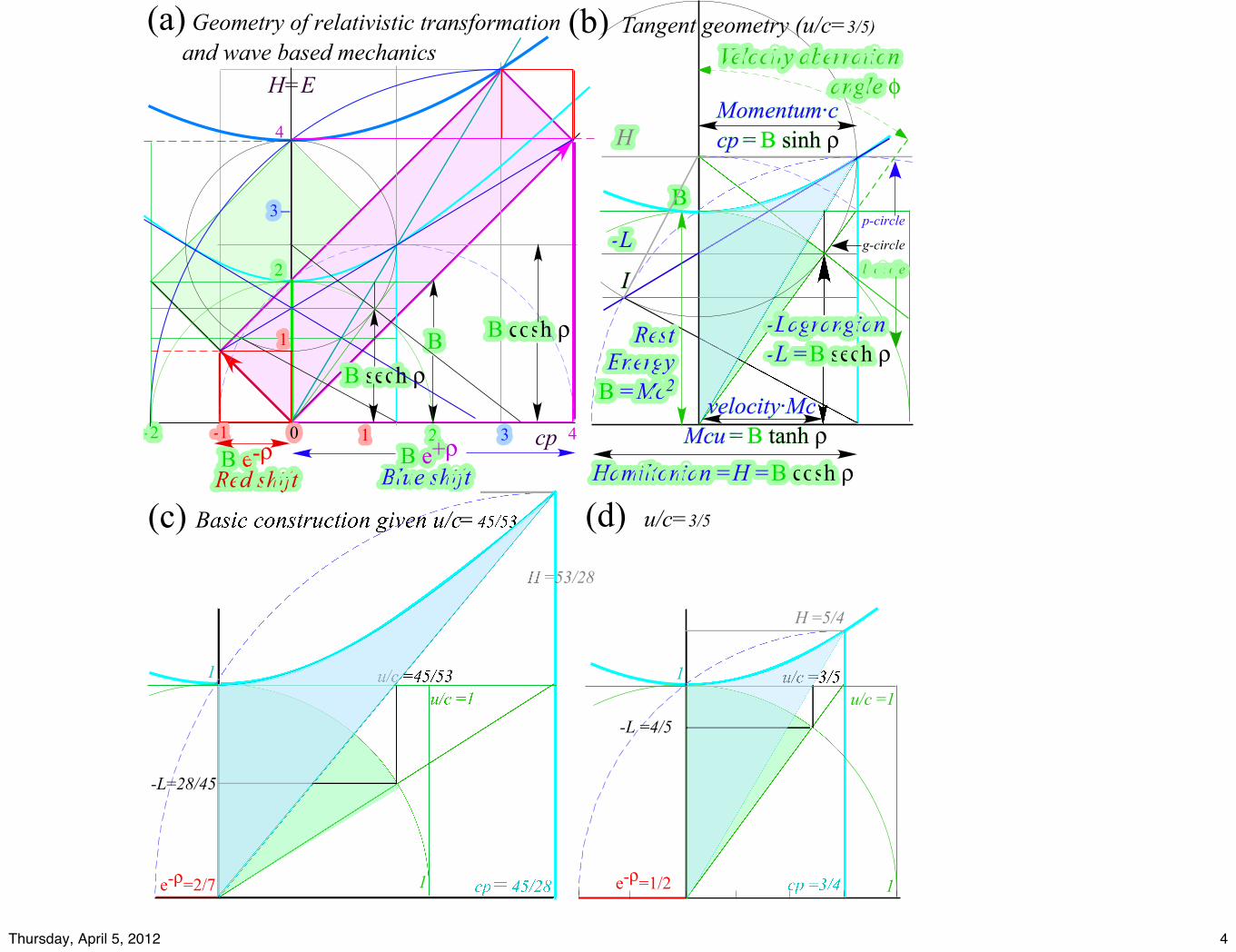
(a) Geometry of relativistic transformationand wave based mechanics
(b) Tangent geometry (u/c=3/5)
(c) Basic construction given u/c=45/53
u/c =3/5u/c =1
cp =3/4
H =5/4
-L =4/5
cp =45/28
H =53/28
-L=28/45
e-ρ=1/2e-ρ=2/7
(d) u/c=3/5
11
1 1
bb--cciirrccllee
g-circle
p-circle
4Thursday, April 5, 2012
-1
-1
+2
0 +1
+1
p-slope=v
dH/dp=+1.0
-1 0 +1
-1
+1
+2
v-slope=p
dL/dv =+1.6
1.6
1
1.0
1
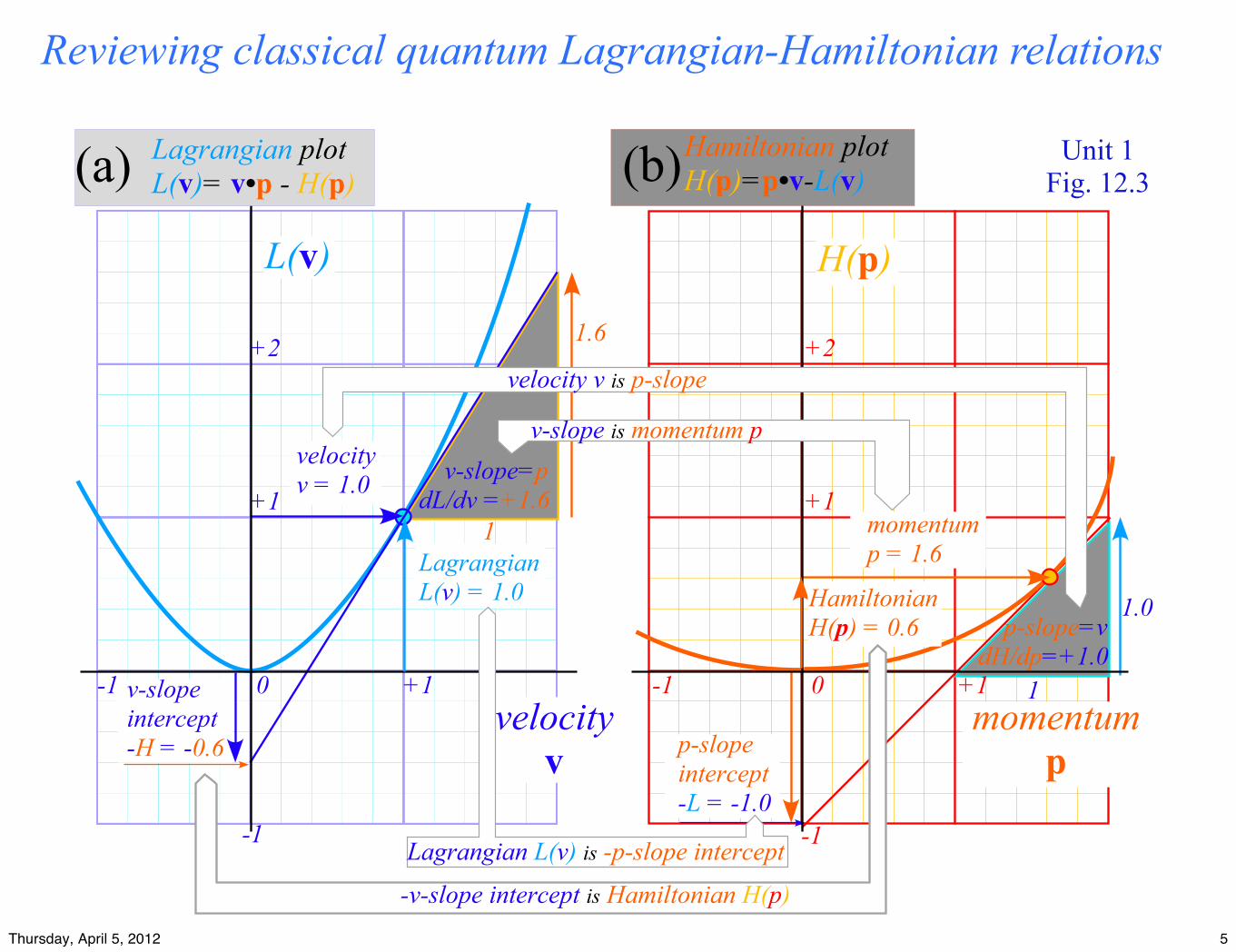
Lagrangian plot
L(v)= v•p - H(p)(a) Hamiltonian plot
H(p)=p•v-L(v)(b)
v-slope
intercept
-H = -0.6 p-slope
intercept
-L = -1.0
Lagrangian
L(v) = 1.0 Hamiltonian
H(p) = 0.6
momentum
pvelocity
v
velocity
v = 1.0
momentum
p = 1.6
L(v) H(p)
v-slope is momentum p
velocity v is p-slope
Lagrangian L(v) is -p-slope intercept
-v-slope intercept is Hamiltonian H(p)
Unit 1Fig. 12.3
Reviewing classical quantum Lagrangian-Hamiltonian relations
5Thursday, April 5, 2012
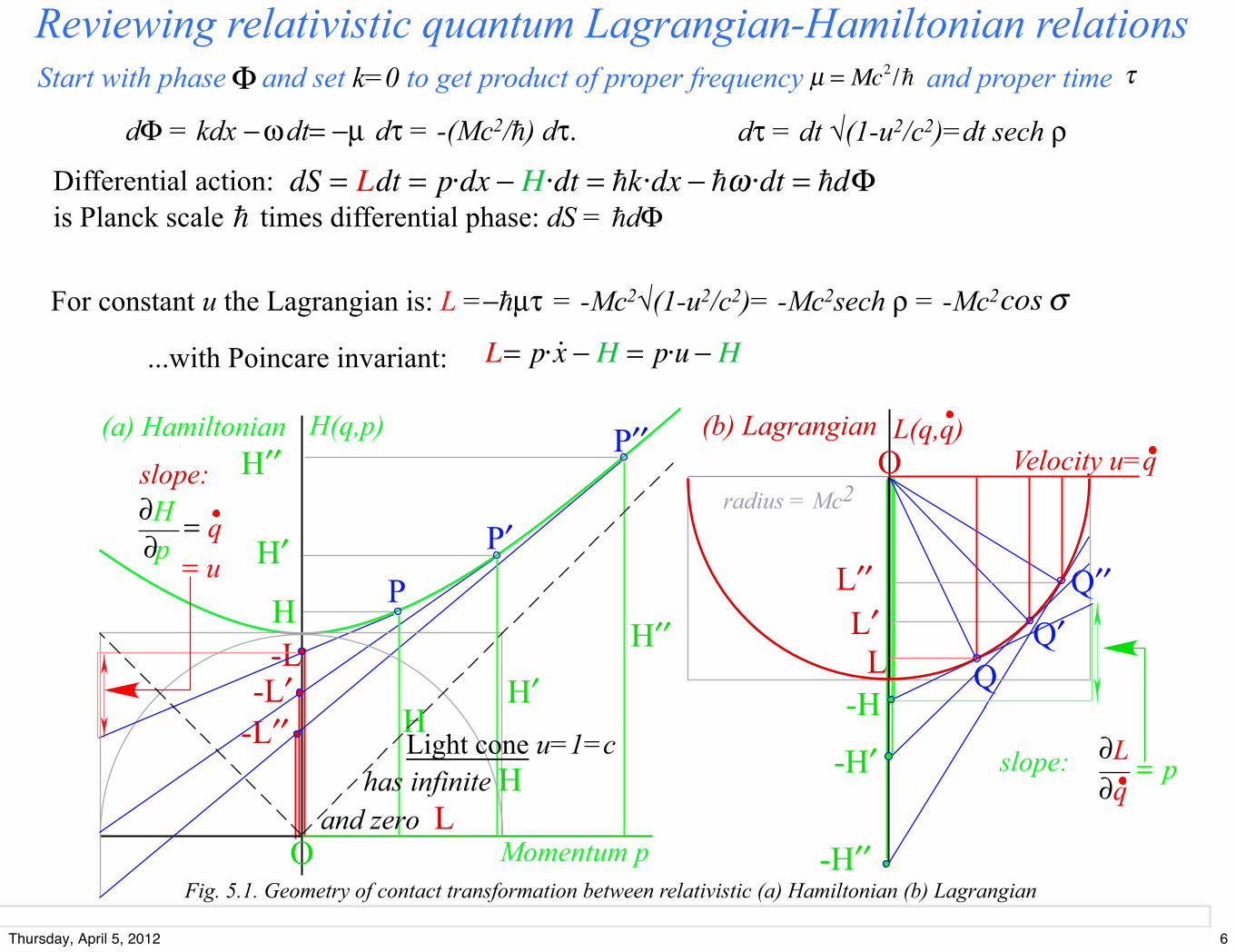
(a) Hamiltonian
Momentum p
PP′
P′′
-L-L′-L′′
L(q,q)
Velocity u=q
QQ′Q′′
-H
-H′
-H′′
HH′
H′′LL′L′′
H
H′
H′′
slope:
slope:
∂H∂p
= q= u
∂L∂q
= p
(b) LagrangianH(q,p)
radius = Mc2
O
O
Light cone u=1=chas infiniteH
and zero L
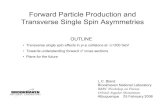
Fig. 5.1. Geometry of contact transformation between relativistic (a) Hamiltonian (b) Lagrangian
Reviewing relativistic quantum Lagrangian-Hamiltonian relations
dΦ = kdx − ω dt= −µ dτ = -(Mc2/) dτ. dτ = dt √(1-u2/c2)=dt sech ρ
Differential action: is Planck scale times differential phase: dS = dΦ
For constant u the Lagrangian is: L =−µτ = -Mc2√(1-u2/c2)= -Mc2sech ρ = -Mc2
Start with phase and set k=0 to get product of proper frequency and proper timeΦ µ = Mc2/ τ
dS = Ldt = p·dx − H·dt = k·dx − ω ·dt = dΦ
cosσ
L= p· x − H = p·u − H...with Poincare invariant:
6Thursday, April 5, 2012
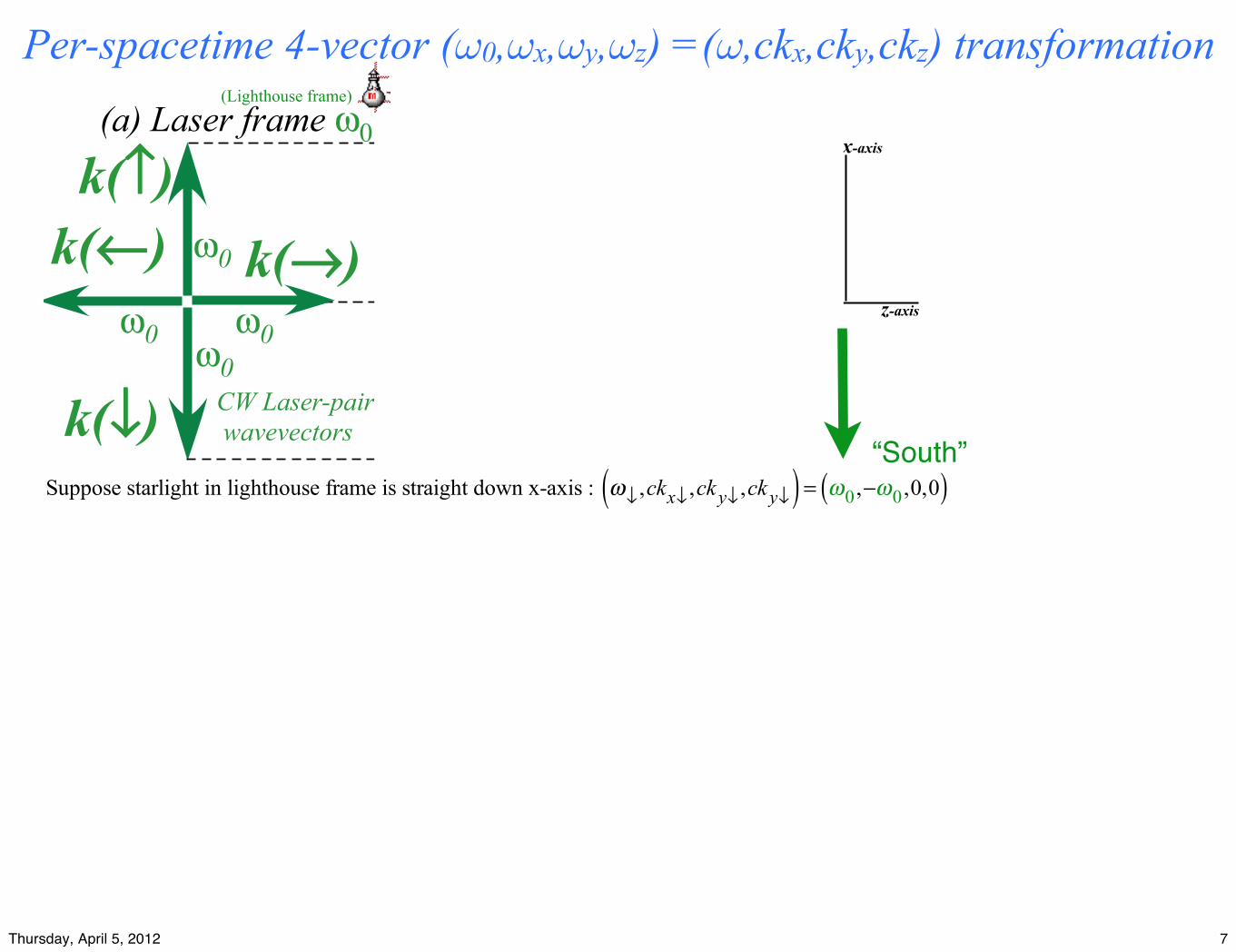
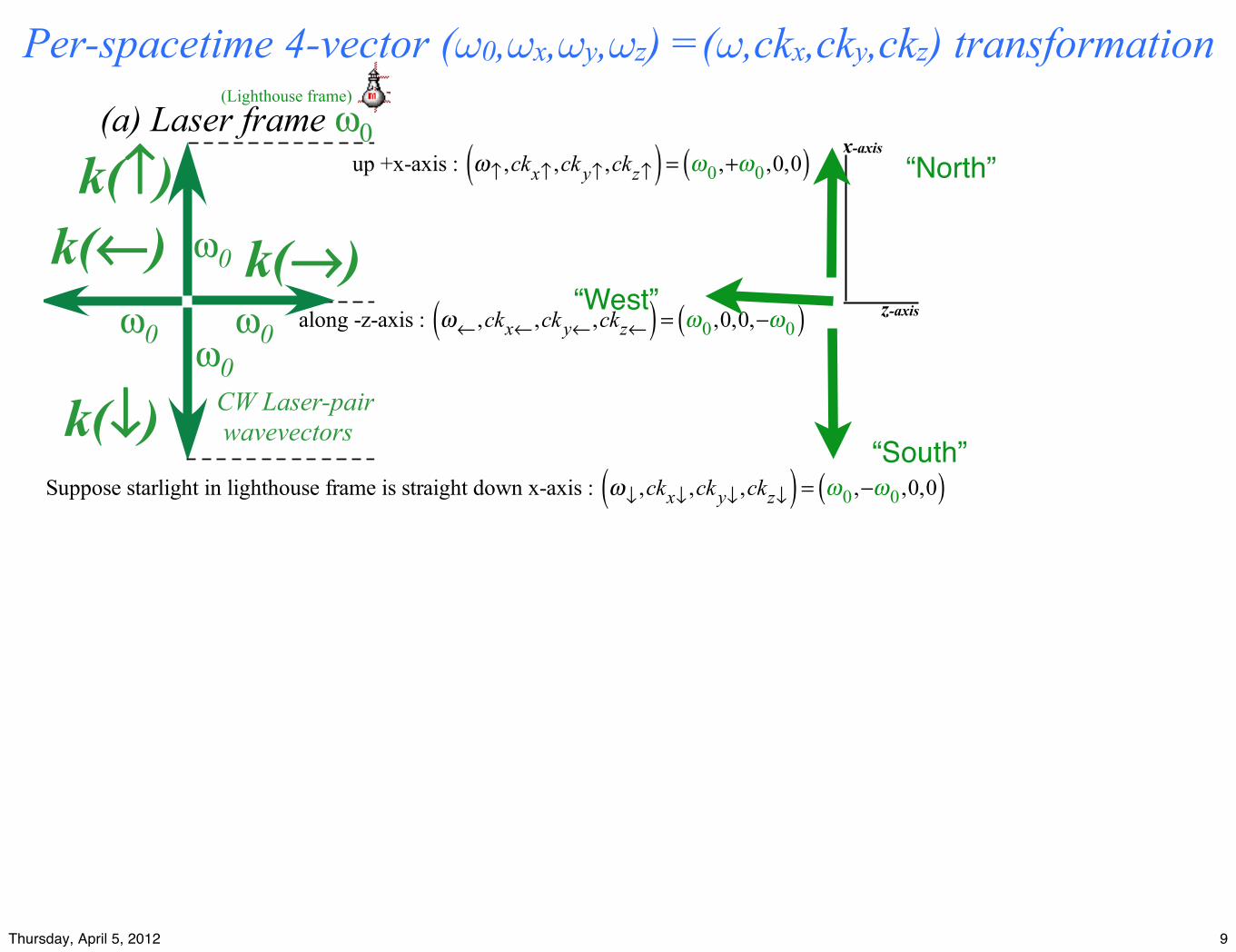
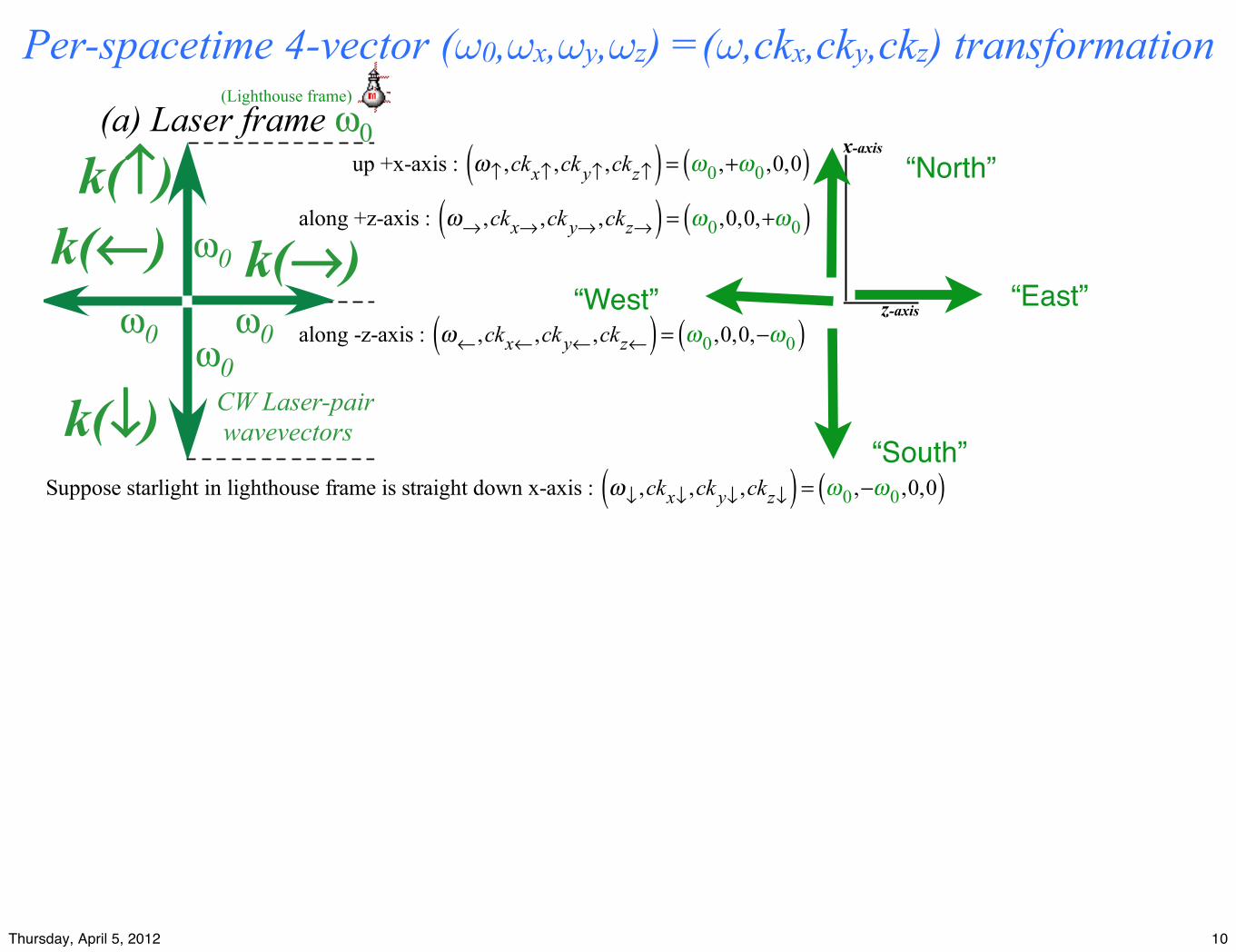
Suppose starlight in lighthouse frame is straight down x-axis : ω↓ ,ckx↓ ,cky↓ ,cky↓( ) = ω0,−ω0,0,0( )
k(→→)k(↑↑)
k(↓↓)
k′′(→→)k′′(↑↑)
k′′(←←)
k′′(↓↓)
(a) Laser frame ω0 (b) z-(→Moving) shipω0 coshρω0
ω0ω0ω0 ω0 eρ
k(←←)
CW Laser-pairwavevectors
Apparentpositionof k′(↑)source
Apparentpositionof k′(↓)source
ω0 e−ρz-axis
x-axis
Per-spacetime 4-vector (ω0,ωx,ωy,ωz) =(ω,ckx,cky,ckz) transformation
−ω0 sinhρz
ω0 coshρz
−ω0
“South”
(Lighthouse frame)
7Thursday, April 5, 2012
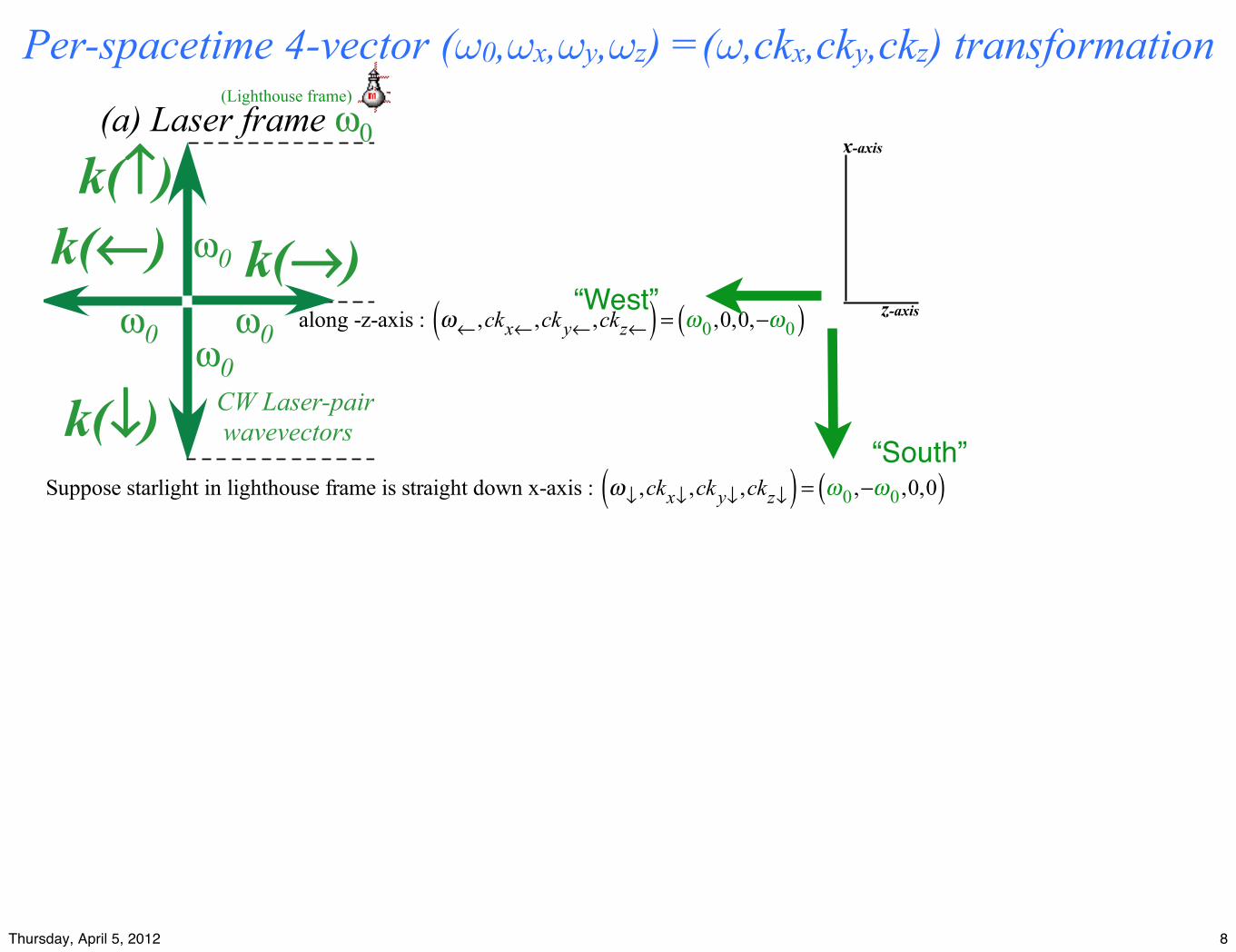
Suppose starlight in lighthouse frame is straight down x-axis : ω↓ ,ckx↓ ,cky↓ ,ckz↓( ) = ω0,−ω0,0,0( )
k(→→)k(↑↑)
k(↓↓)
k′′(→→)k′′(↑↑)
k′′(←←)
k′′(↓↓)
(a) Laser frame ω0 (b) z-(→Moving) shipω0 coshρω0
ω0ω0ω0 ω0 eρ
k(←←)
CW Laser-pairwavevectors
Apparentpositionof k′(↑)source
Apparentpositionof k′(↓)source
ω0 e−ρz-axis
x-axis
Per-spacetime 4-vector (ω0,ωx,ωy,ωz) =(ω,ckx,cky,ckz) transformation
−ω0 sinhρz
ω0 coshρz
−ω0
along -z-axis : ω←,ckx←,cky←,ckz←( ) = ω0,0,0,−ω0( )
“South”
“West”
(Lighthouse frame)
8Thursday, April 5, 2012
Suppose starlight in lighthouse frame is straight down x-axis : ω↓ ,ckx↓ ,cky↓ ,ckz↓( ) = ω0,−ω0,0,0( )
k(→→)k(↑↑)
k(↓↓)
k′′(→→)k′′(↑↑)
k′′(←←)
k′′(↓↓)
(a) Laser frame ω0 (b) z-(→Moving) shipω0 coshρω0
ω0ω0ω0 ω0 eρ
k(←←)
CW Laser-pairwavevectors
Apparentpositionof k′(↑)source
Apparentpositionof k′(↓)source
ω0 e−ρz-axis
x-axis
Per-spacetime 4-vector (ω0,ωx,ωy,ωz) =(ω,ckx,cky,ckz) transformation
−ω0 sinhρz
ω0 coshρz
−ω0
along -z-axis : ω←,ckx←,cky←,ckz←( ) = ω0,0,0,−ω0( )
up +x-axis : ω↑ ,ckx↑ ,cky↑ ,ckz↑( ) = ω0,+ω0,0,0( )
“South”
“West”
“North”
(Lighthouse frame)
9Thursday, April 5, 2012
Suppose starlight in lighthouse frame is straight down x-axis : ω↓ ,ckx↓ ,cky↓ ,ckz↓( ) = ω0,−ω0,0,0( )
k(→→)k(↑↑)
k(↓↓)
k′′(→→)k′′(↑↑)
k′′(←←)
k′′(↓↓)
(a) Laser frame ω0 (b) z-(→Moving) shipω0 coshρω0
ω0ω0ω0 ω0 eρ
k(←←)
CW Laser-pairwavevectors
Apparentpositionof k′(↑)source
Apparentpositionof k′(↓)source
ω0 e−ρz-axis
x-axis
Per-spacetime 4-vector (ω0,ωx,ωy,ωz) =(ω,ckx,cky,ckz) transformation
−ω0 sinhρz
ω0 coshρz
−ω0
along +z-axis : ω→ ,ckx→ ,cky→ ,ckz→( ) = ω0,0,0,+ω0( )
along -z-axis : ω←,ckx←,cky←,ckz←( ) = ω0,0,0,−ω0( )
up +x-axis : ω↑ ,ckx↑ ,cky↑ ,ckz↑( ) = ω0,+ω0,0,0( )
“South”
“West”
“North”
“East”
(Lighthouse frame)
10Thursday, April 5, 2012
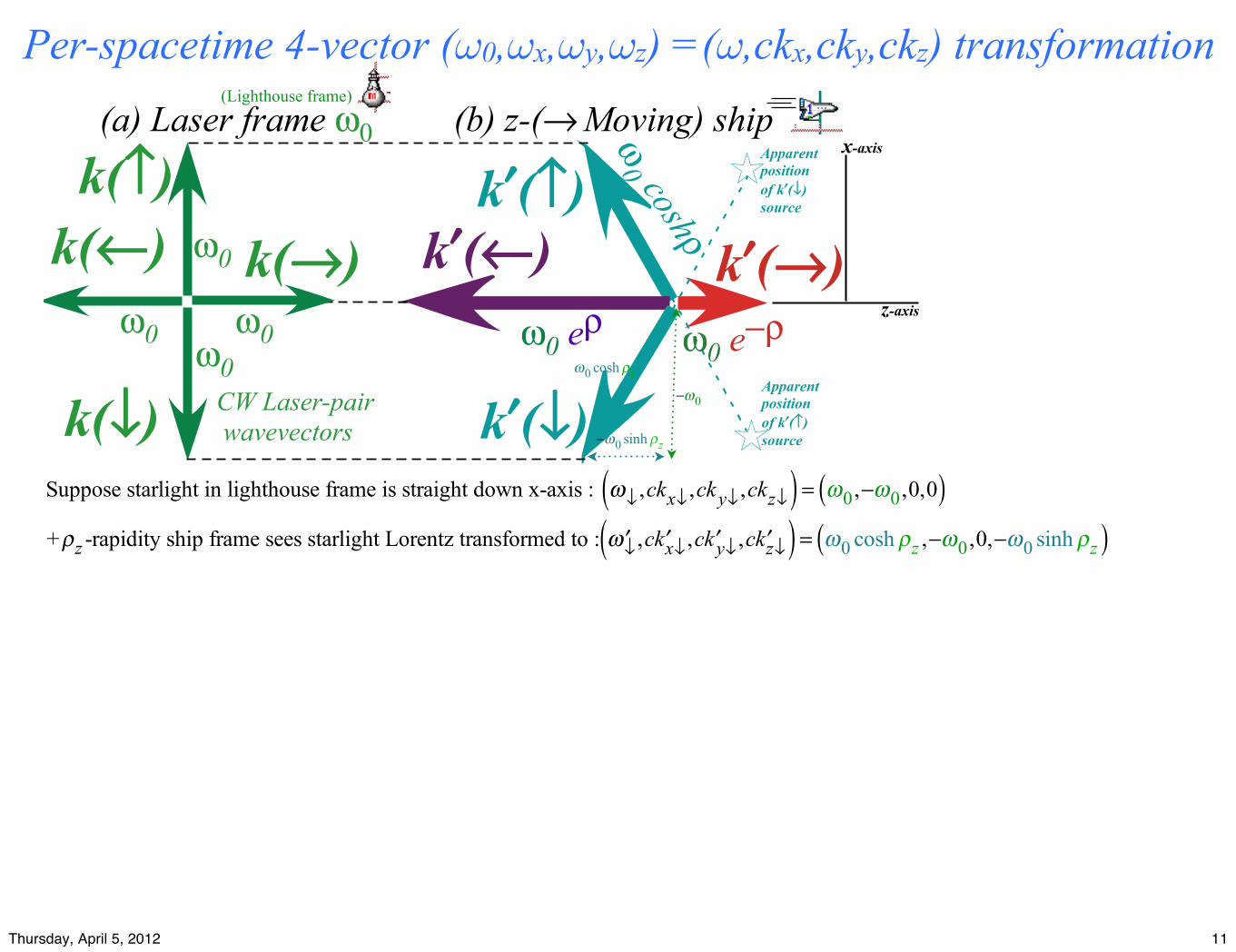
Suppose starlight in lighthouse frame is straight down x-axis : ω↓ ,ckx↓ ,cky↓ ,ckz↓( ) = ω0,−ω0,0,0( )+ρz -rapidity ship frame sees starlight Lorentz transformed to : ′ω↓ ,c ′kx↓ ,c ′ky↓ ,c ′kz↓( ) = ω0 coshρz ,−ω0,0,−ω0 sinhρz( )
k(→→)k(↑↑)
k(↓↓)
k′′(→→)k′′(↑↑)
k′′(←←)
k′′(↓↓)
(a) Laser frame ω0 (b) z-(→Moving) shipω0 coshρω0
ω0ω0ω0 ω0 eρ
k(←←)
CW Laser-pairwavevectors
Apparentpositionof k′(↑)source
Apparentpositionof k′(↓)source
ω0 e−ρz-axis
x-axis
Per-spacetime 4-vector (ω0,ωx,ωy,ωz) =(ω,ckx,cky,ckz) transformation
−ω0 sinhρz
ω0 coshρz
−ω0
(Lighthouse frame)
11Thursday, April 5, 2012
′ω↓c ′kx↓c ′ky↓
c ′kz↓
⎛
⎝
⎜⎜⎜⎜⎜⎜
⎞
⎠
⎟⎟⎟⎟⎟⎟
=
coshρz ⋅ ⋅ −sinhρz⋅ 1 ⋅ ⋅⋅ ⋅ 1 ⋅
−sinhρz ⋅ ⋅ coshρz
⎛
⎝
⎜⎜⎜⎜⎜
⎞
⎠
⎟⎟⎟⎟⎟
ω↓ckx↓cky↓
ckz↓
⎛
⎝
⎜⎜⎜⎜⎜⎜
⎞
⎠
⎟⎟⎟⎟⎟⎟
=
coshρz ⋅ ⋅ −sinhρz⋅ 1 ⋅ ⋅⋅ ⋅ 1 ⋅
−sinhρz ⋅ ⋅ coshρz
⎛
⎝
⎜⎜⎜⎜⎜
⎞
⎠
⎟⎟⎟⎟⎟
ω0−ω0
00
⎛
⎝
⎜⎜⎜⎜⎜
⎞
⎠
⎟⎟⎟⎟⎟
=
ω0 coshρz−ω0
0−ω0 sinhρz
⎛
⎝
⎜⎜⎜⎜⎜
⎞
⎠
⎟⎟⎟⎟⎟
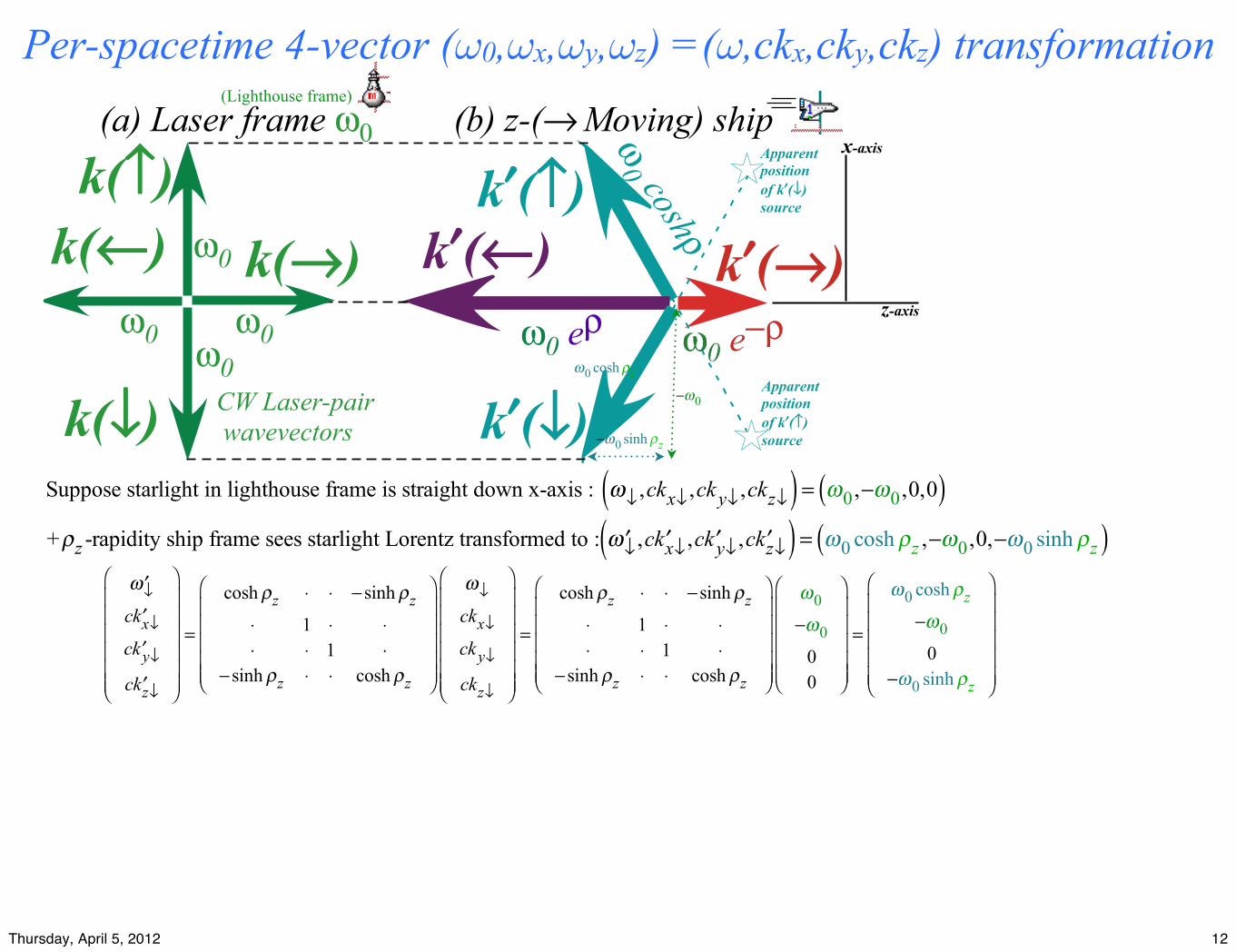
Suppose starlight in lighthouse frame is straight down x-axis : ω↓ ,ckx↓ ,cky↓ ,ckz↓( ) = ω0,−ω0,0,0( )+ρz -rapidity ship frame sees starlight Lorentz transformed to : ′ω↓ ,c ′kx↓ ,c ′ky↓ ,c ′kz↓( ) = ω0 coshρz ,−ω0,0,−ω0 sinhρz( )
k(→→)k(↑↑)
k(↓↓)
k′′(→→)k′′(↑↑)
k′′(←←)
k′′(↓↓)
(a) Laser frame ω0 (b) z-(→Moving) shipω0 coshρω0
ω0ω0ω0 ω0 eρ
k(←←)
CW Laser-pairwavevectors
Apparentpositionof k′(↑)source
Apparentpositionof k′(↓)source
ω0 e−ρz-axis
x-axis
Per-spacetime 4-vector (ω0,ωx,ωy,ωz) =(ω,ckx,cky,ckz) transformation
−ω0 sinhρz
ω0 coshρz
−ω0
(Lighthouse frame)
12Thursday, April 5, 2012
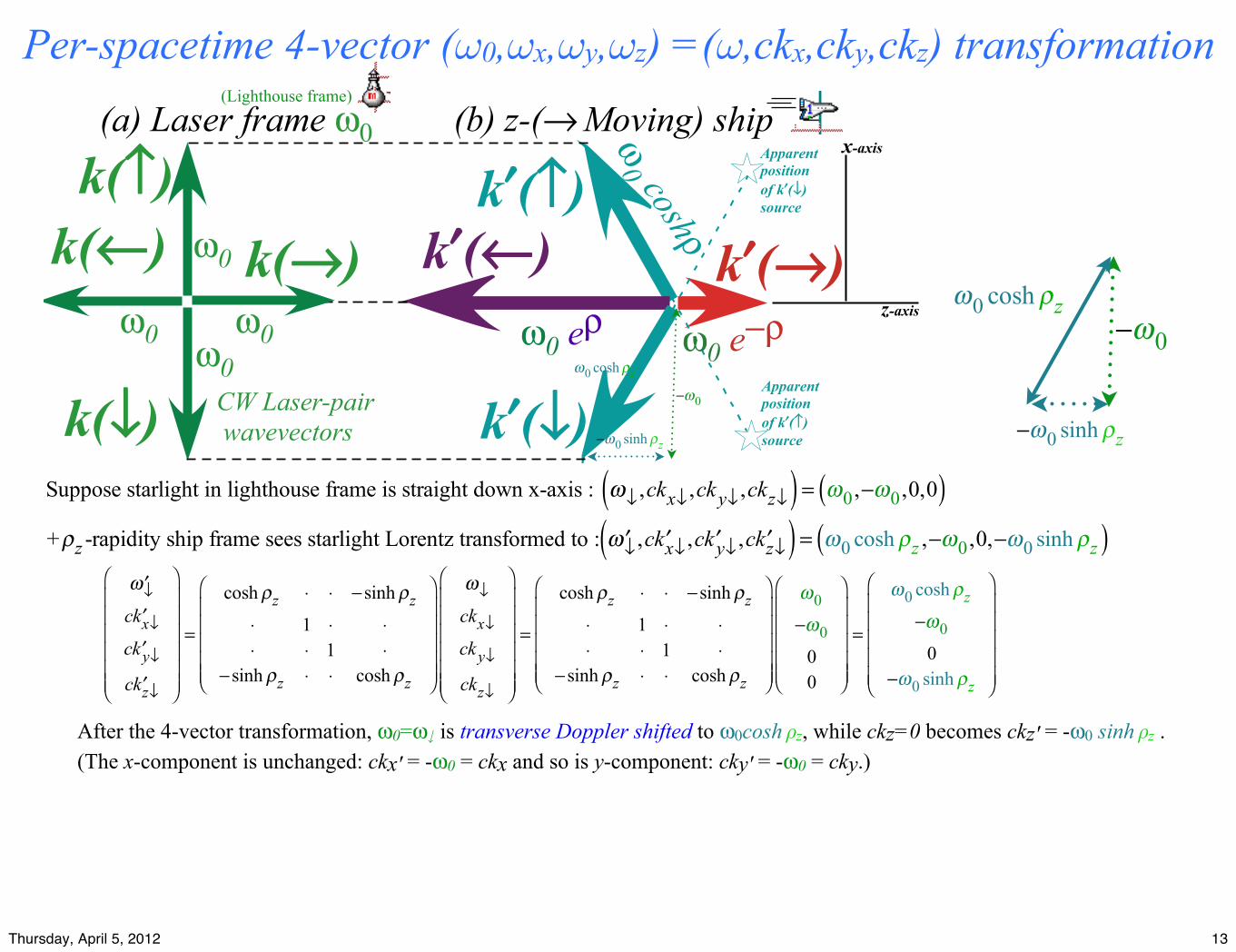
After the 4-vector transformation, ω0=ω↓ is transverse Doppler shifted to ω0cosh ρz, while ckz=0 becomes ckz' = -ω0 sinh ρz .(The x-component is unchanged: ckx' = -ω0 = ckx and so is y-component: cky' = -ω0 = cky.)
′ω↓c ′kx↓c ′ky↓
c ′kz↓
⎛
⎝
⎜⎜⎜⎜⎜⎜
⎞
⎠
⎟⎟⎟⎟⎟⎟
=
coshρz ⋅ ⋅ −sinhρz⋅ 1 ⋅ ⋅⋅ ⋅ 1 ⋅
−sinhρz ⋅ ⋅ coshρz
⎛
⎝
⎜⎜⎜⎜⎜
⎞
⎠
⎟⎟⎟⎟⎟
ω↓ckx↓cky↓
ckz↓
⎛
⎝
⎜⎜⎜⎜⎜⎜
⎞
⎠
⎟⎟⎟⎟⎟⎟
=
coshρz ⋅ ⋅ −sinhρz⋅ 1 ⋅ ⋅⋅ ⋅ 1 ⋅
−sinhρz ⋅ ⋅ coshρz
⎛
⎝
⎜⎜⎜⎜⎜
⎞
⎠
⎟⎟⎟⎟⎟
ω0−ω0
00
⎛
⎝
⎜⎜⎜⎜⎜
⎞
⎠
⎟⎟⎟⎟⎟
=
ω0 coshρz−ω0
0−ω0 sinhρz
⎛
⎝
⎜⎜⎜⎜⎜
⎞
⎠
⎟⎟⎟⎟⎟
Suppose starlight in lighthouse frame is straight down x-axis : ω↓ ,ckx↓ ,cky↓ ,ckz↓( ) = ω0,−ω0,0,0( )+ρz -rapidity ship frame sees starlight Lorentz transformed to : ′ω↓ ,c ′kx↓ ,c ′ky↓ ,c ′kz↓( ) = ω0 coshρz ,−ω0,0,−ω0 sinhρz( )
k(→→)k(↑↑)
k(↓↓)
k′′(→→)k′′(↑↑)
k′′(←←)
k′′(↓↓)
(a) Laser frame ω0 (b) z-(→Moving) shipω0 coshρω0
ω0ω0ω0 ω0 eρ
k(←←)
CW Laser-pairwavevectors
Apparentpositionof k′(↑)source
Apparentpositionof k′(↓)source
ω0 e−ρz-axis
x-axis
Per-spacetime 4-vector (ω0,ωx,ωy,ωz) =(ω,ckx,cky,ckz) transformation
−ω0 sinhρz
ω0 coshρz
−ω0
−ω0 sinhρz
−ω0 ω0 coshρz
(Lighthouse frame)
13Thursday, April 5, 2012
After the 4-vector transformation, ω0=ω↓ is transverse Doppler shifted to ω0cosh ρz, while ckz=0 becomes ckz' = -ω0 sinh ρz .(The x-component is unchanged: ckx' = -ω0 = ckx and so is y-component: cky' = -ω0 = cky.)
′ω↓c ′kx↓c ′ky↓
c ′kz↓
⎛
⎝
⎜⎜⎜⎜⎜⎜
⎞
⎠
⎟⎟⎟⎟⎟⎟
=
coshρz ⋅ ⋅ −sinhρz⋅ 1 ⋅ ⋅⋅ ⋅ 1 ⋅
−sinhρz ⋅ ⋅ coshρz
⎛
⎝
⎜⎜⎜⎜⎜
⎞
⎠
⎟⎟⎟⎟⎟
ω↓ckx↓cky↓
ckz↓
⎛
⎝
⎜⎜⎜⎜⎜⎜
⎞
⎠
⎟⎟⎟⎟⎟⎟
=
coshρz ⋅ ⋅ −sinhρz⋅ 1 ⋅ ⋅⋅ ⋅ 1 ⋅
−sinhρz ⋅ ⋅ coshρz
⎛
⎝
⎜⎜⎜⎜⎜
⎞
⎠
⎟⎟⎟⎟⎟
ω0−ω0
00
⎛
⎝
⎜⎜⎜⎜⎜
⎞
⎠
⎟⎟⎟⎟⎟
=
ω0 coshρz−ω0
0−ω0 sinhρz
⎛
⎝
⎜⎜⎜⎜⎜
⎞
⎠
⎟⎟⎟⎟⎟
=
ω0 secσ
−ω00
−ω0 tanσ
⎛
⎝
⎜⎜⎜⎜⎜
⎞
⎠
⎟⎟⎟⎟⎟
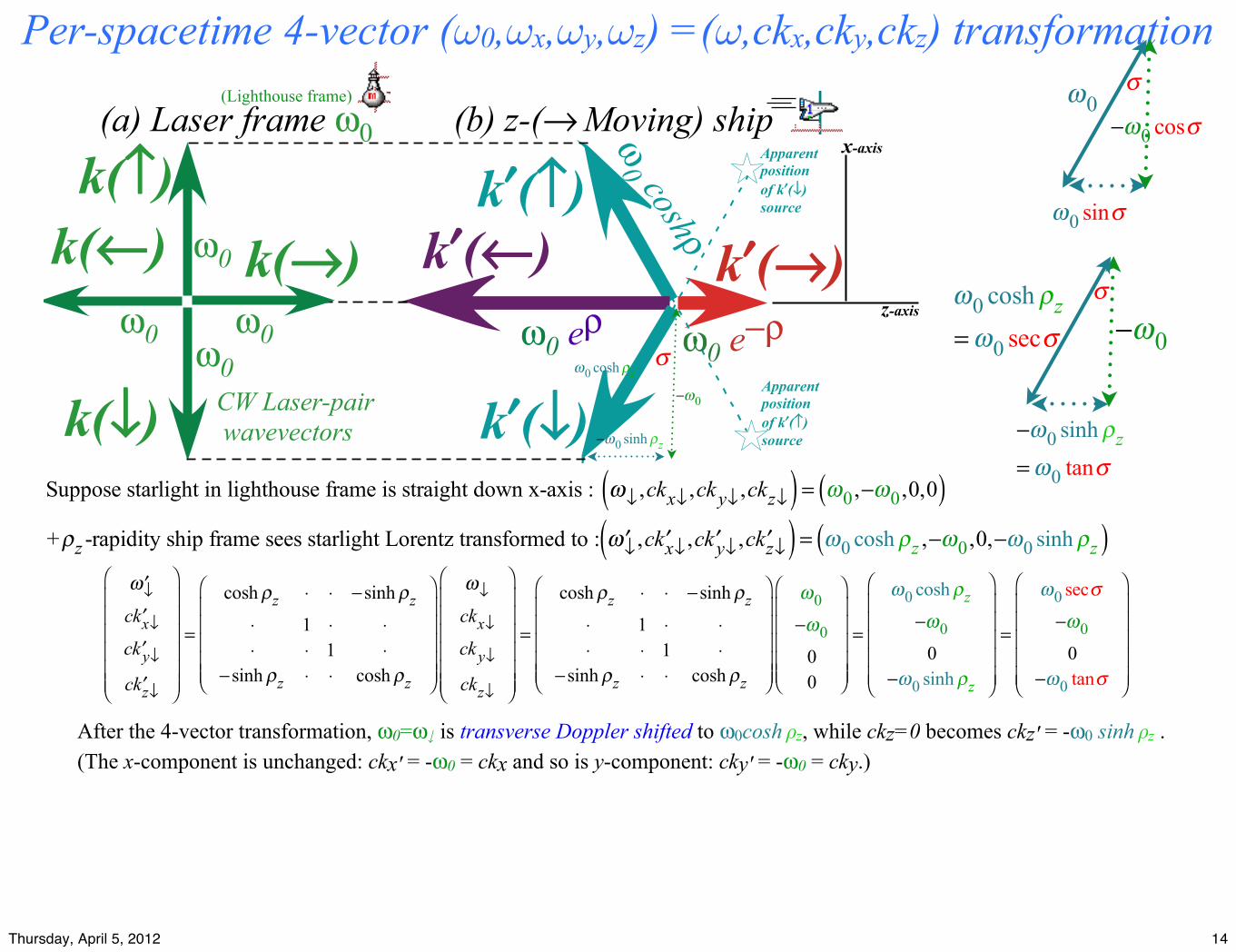
Suppose starlight in lighthouse frame is straight down x-axis : ω↓ ,ckx↓ ,cky↓ ,ckz↓( ) = ω0,−ω0,0,0( )+ρz -rapidity ship frame sees starlight Lorentz transformed to : ′ω↓ ,c ′kx↓ ,c ′ky↓ ,c ′kz↓( ) = ω0 coshρz ,−ω0,0,−ω0 sinhρz( )
k(→→)k(↑↑)
k(↓↓)
k′′(→→)k′′(↑↑)
k′′(←←)
k′′(↓↓)
(a) Laser frame ω0 (b) z-(→Moving) shipω0 coshρω0
ω0ω0ω0 ω0 eρ
k(←←)
CW Laser-pairwavevectors
Apparentpositionof k′(↑)source
Apparentpositionof k′(↓)source
ω0 e−ρz-axis
x-axis
Per-spacetime 4-vector (ω0,ωx,ωy,ωz) =(ω,ckx,cky,ckz) transformation
−ω0 sinhρz
ω0 coshρz
−ω0
−ω0 sinhρz=ω0 tanσ
−ω0
ω0 coshρz=ω0 secσ
ω0 sinσ
−ω0 cosσ ω0
σ
σ
σ
(Lighthouse frame)
14Thursday, April 5, 2012
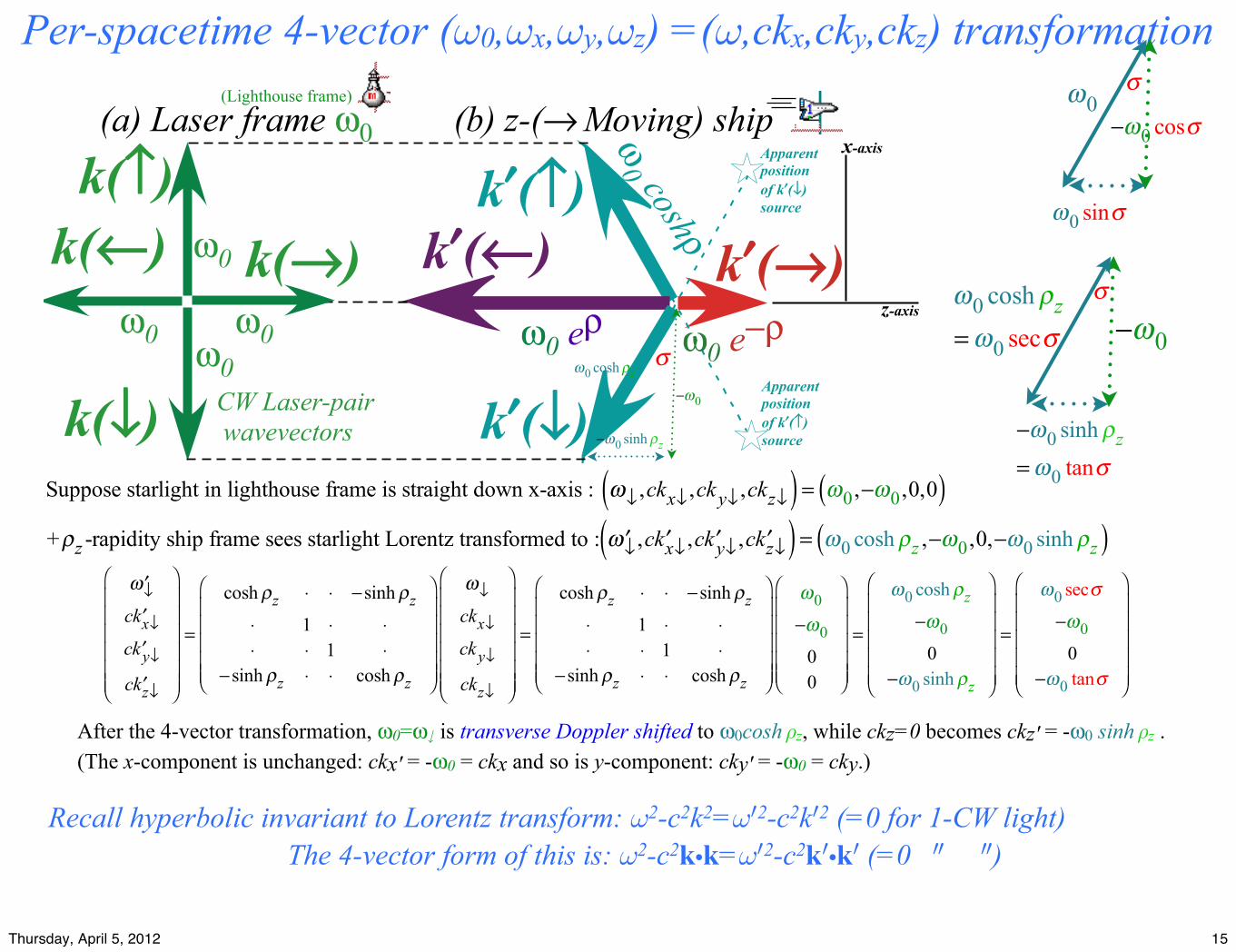
After the 4-vector transformation, ω0=ω↓ is transverse Doppler shifted to ω0cosh ρz, while ckz=0 becomes ckz' = -ω0 sinh ρz .(The x-component is unchanged: ckx' = -ω0 = ckx and so is y-component: cky' = -ω0 = cky.)
′ω↓c ′kx↓c ′ky↓
c ′kz↓
⎛
⎝
⎜⎜⎜⎜⎜⎜
⎞
⎠
⎟⎟⎟⎟⎟⎟
=
coshρz ⋅ ⋅ −sinhρz⋅ 1 ⋅ ⋅⋅ ⋅ 1 ⋅
−sinhρz ⋅ ⋅ coshρz
⎛
⎝
⎜⎜⎜⎜⎜
⎞
⎠
⎟⎟⎟⎟⎟
ω↓ckx↓cky↓
ckz↓
⎛
⎝
⎜⎜⎜⎜⎜⎜
⎞
⎠
⎟⎟⎟⎟⎟⎟
=
coshρz ⋅ ⋅ −sinhρz⋅ 1 ⋅ ⋅⋅ ⋅ 1 ⋅
−sinhρz ⋅ ⋅ coshρz
⎛
⎝
⎜⎜⎜⎜⎜
⎞
⎠
⎟⎟⎟⎟⎟
ω0−ω0
00
⎛
⎝
⎜⎜⎜⎜⎜
⎞
⎠
⎟⎟⎟⎟⎟
=
ω0 coshρz−ω0
0−ω0 sinhρz
⎛
⎝
⎜⎜⎜⎜⎜
⎞
⎠
⎟⎟⎟⎟⎟
=
ω0 secσ
−ω00
−ω0 tanσ
⎛
⎝
⎜⎜⎜⎜⎜
⎞
⎠
⎟⎟⎟⎟⎟
Suppose starlight in lighthouse frame is straight down x-axis : ω↓ ,ckx↓ ,cky↓ ,ckz↓( ) = ω0,−ω0,0,0( )+ρz -rapidity ship frame sees starlight Lorentz transformed to : ′ω↓ ,c ′kx↓ ,c ′ky↓ ,c ′kz↓( ) = ω0 coshρz ,−ω0,0,−ω0 sinhρz( )
k(→→)k(↑↑)
k(↓↓)
k′′(→→)k′′(↑↑)
k′′(←←)
k′′(↓↓)
(a) Laser frame ω0 (b) z-(→Moving) shipω0 coshρω0
ω0ω0ω0 ω0 eρ
k(←←)
CW Laser-pairwavevectors
Apparentpositionof k′(↑)source
Apparentpositionof k′(↓)source
ω0 e−ρz-axis
x-axis
Per-spacetime 4-vector (ω0,ωx,ωy,ωz) =(ω,ckx,cky,ckz) transformation
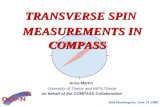
Recall hyperbolic invariant to Lorentz transform: ω2-c2k2=ω′2-c2k′2 (=0 for 1-CW light) The 4-vector form of this is: ω2-c2k•k=ω′2-c2k′•k′ (=0 ″ ″)
−ω0 sinhρz
ω0 coshρz
−ω0
−ω0 sinhρz=ω0 tanσ
−ω0
ω0 coshρz=ω0 secσ
ω0 sinσ
−ω0 cosσ ω0
σ
σ
σ
(Lighthouse frame)
15Thursday, April 5, 2012
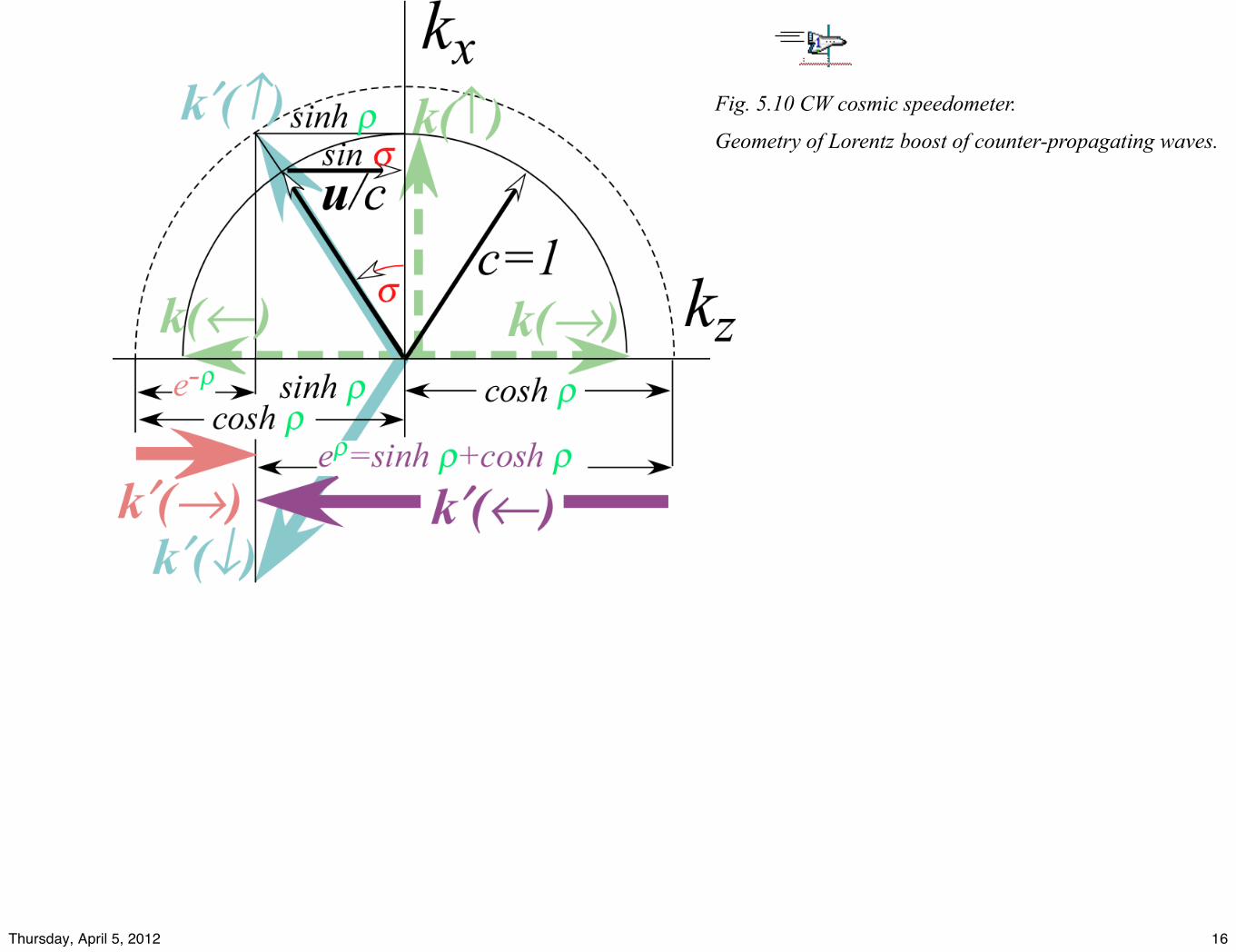
Fig. 5.10 CW cosmic speedometer.
Geometry of Lorentz boost of counter-propagating waves.
16Thursday, April 5, 2012
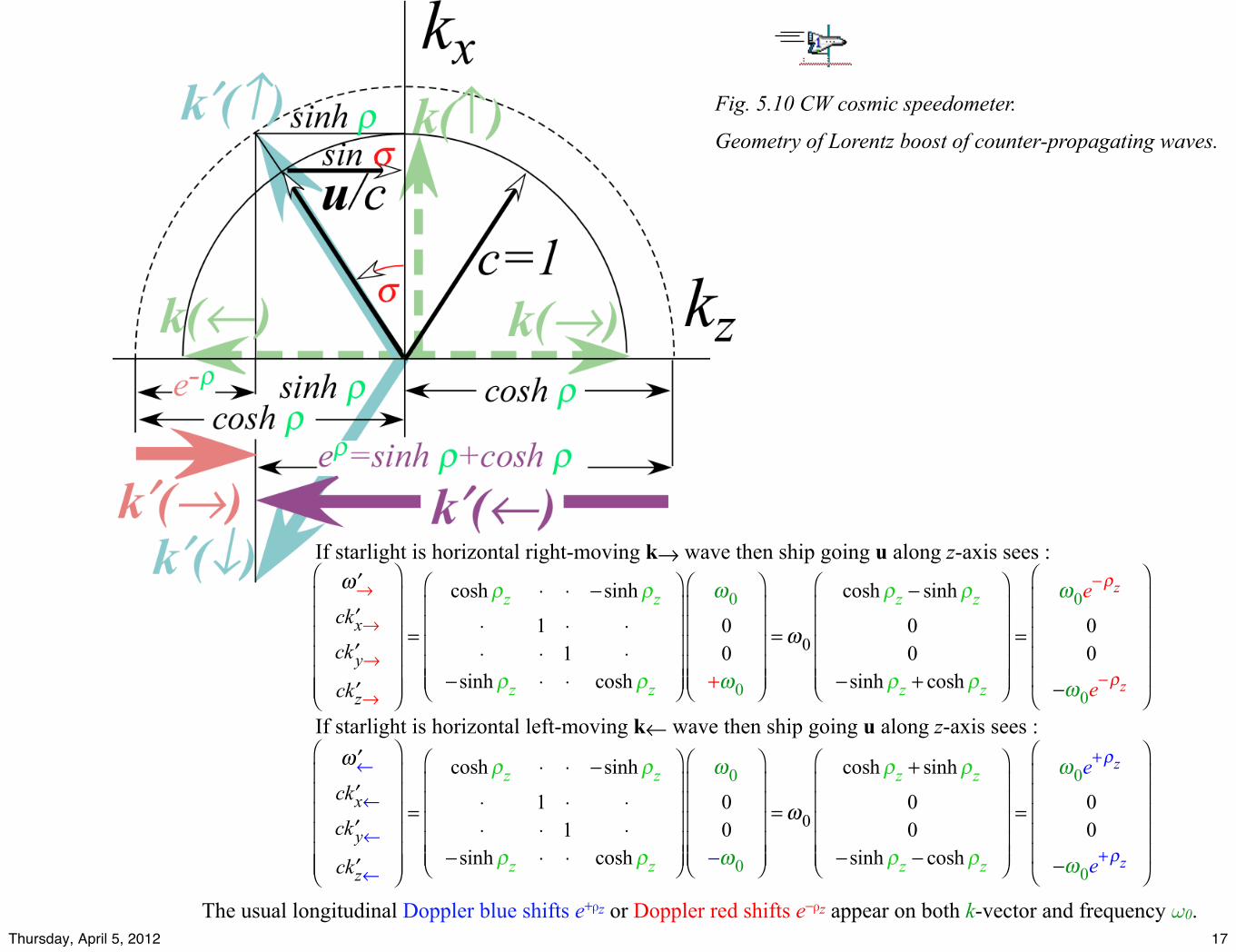
Fig. 5.10 CW cosmic speedometer.
Geometry of Lorentz boost of counter-propagating waves.
′ω→c ′kx→c ′ky→
c ′kz→
⎛
⎝
⎜⎜⎜⎜⎜⎜
⎞
⎠
⎟⎟⎟⎟⎟⎟
=
coshρz ⋅ ⋅ −sinhρz⋅ 1 ⋅ ⋅⋅ ⋅ 1 ⋅
−sinhρz ⋅ ⋅ coshρz
⎛
⎝
⎜⎜⎜⎜⎜
⎞
⎠
⎟⎟⎟⎟⎟
ω000
+ω0
⎛
⎝
⎜⎜⎜⎜⎜
⎞
⎠
⎟⎟⎟⎟⎟
=ω0
coshρz − sinhρz00
−sinhρz + coshρz
⎛
⎝
⎜⎜⎜⎜⎜
⎞
⎠
⎟⎟⎟⎟⎟
=
ω0e−ρz
00
−ω0e−ρz
⎛
⎝
⎜⎜⎜⎜⎜
⎞
⎠
⎟⎟⎟⎟⎟
If starlight is horizontal right-moving k→ wave then ship going u along z-axis sees :
The usual longitudinal Doppler blue shifts e+ρz or Doppler red shifts e−ρz appear on both k-vector and frequency ω0.
If starlight is horizontal left-moving k← wave then ship going u along z-axis sees :
′ω←c ′kx←c ′ky←
c ′kz←
⎛
⎝
⎜⎜⎜⎜⎜⎜
⎞
⎠
⎟⎟⎟⎟⎟⎟
=
coshρz ⋅ ⋅ −sinhρz⋅ 1 ⋅ ⋅⋅ ⋅ 1 ⋅
−sinhρz ⋅ ⋅ coshρz
⎛
⎝
⎜⎜⎜⎜⎜
⎞
⎠
⎟⎟⎟⎟⎟
ω000
−ω0
⎛
⎝
⎜⎜⎜⎜⎜
⎞
⎠
⎟⎟⎟⎟⎟
=ω0
coshρz + sinhρz00
−sinhρz − coshρz
⎛
⎝
⎜⎜⎜⎜⎜
⎞
⎠
⎟⎟⎟⎟⎟
=
ω0e+ρz
00
−ω0e+ρz
⎛
⎝
⎜⎜⎜⎜⎜
⎞
⎠
⎟⎟⎟⎟⎟
17Thursday, April 5, 2012
σ
Proper timecτ=√(ct)2-x2
Coordinate timect=√(cτ)2+x2
Coordinatex=(u/c) ct
cτ
xLight (never ages)x=ct
ο
(Age)
(Distance)
PP
γ
Particle going u in (x,ct)is going speed c in (x, cτ)
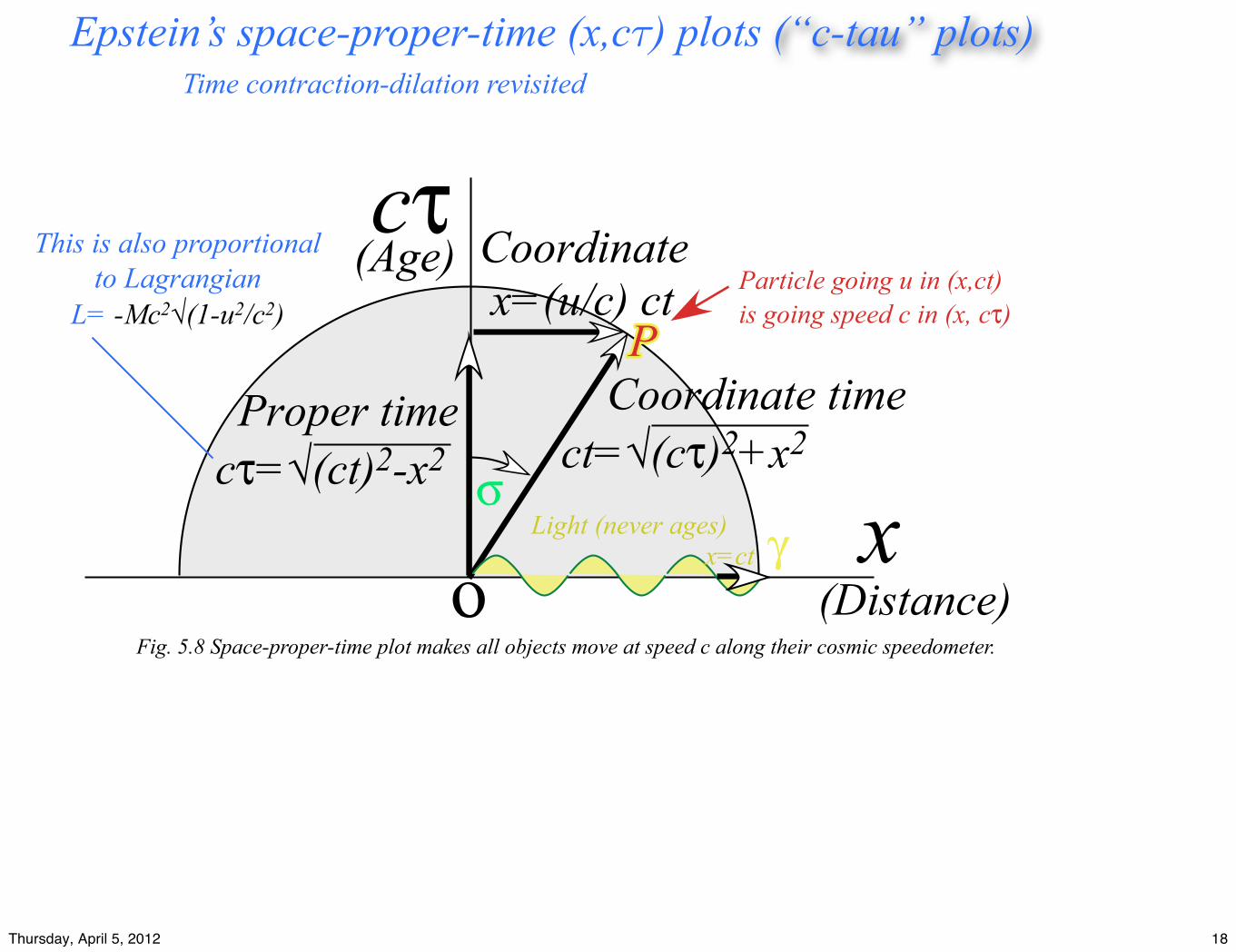
Epstein’s space-proper-time (x,cτ) plots (“c-tau” plots)
Fig. 5.8 Space-proper-time plot makes all objects move at speed c along their cosmic speedometer.
Time contraction-dilation revisited
This is also proportionalto Lagrangian
L= -Mc2√(1-u2/c2)
18Thursday, April 5, 2012
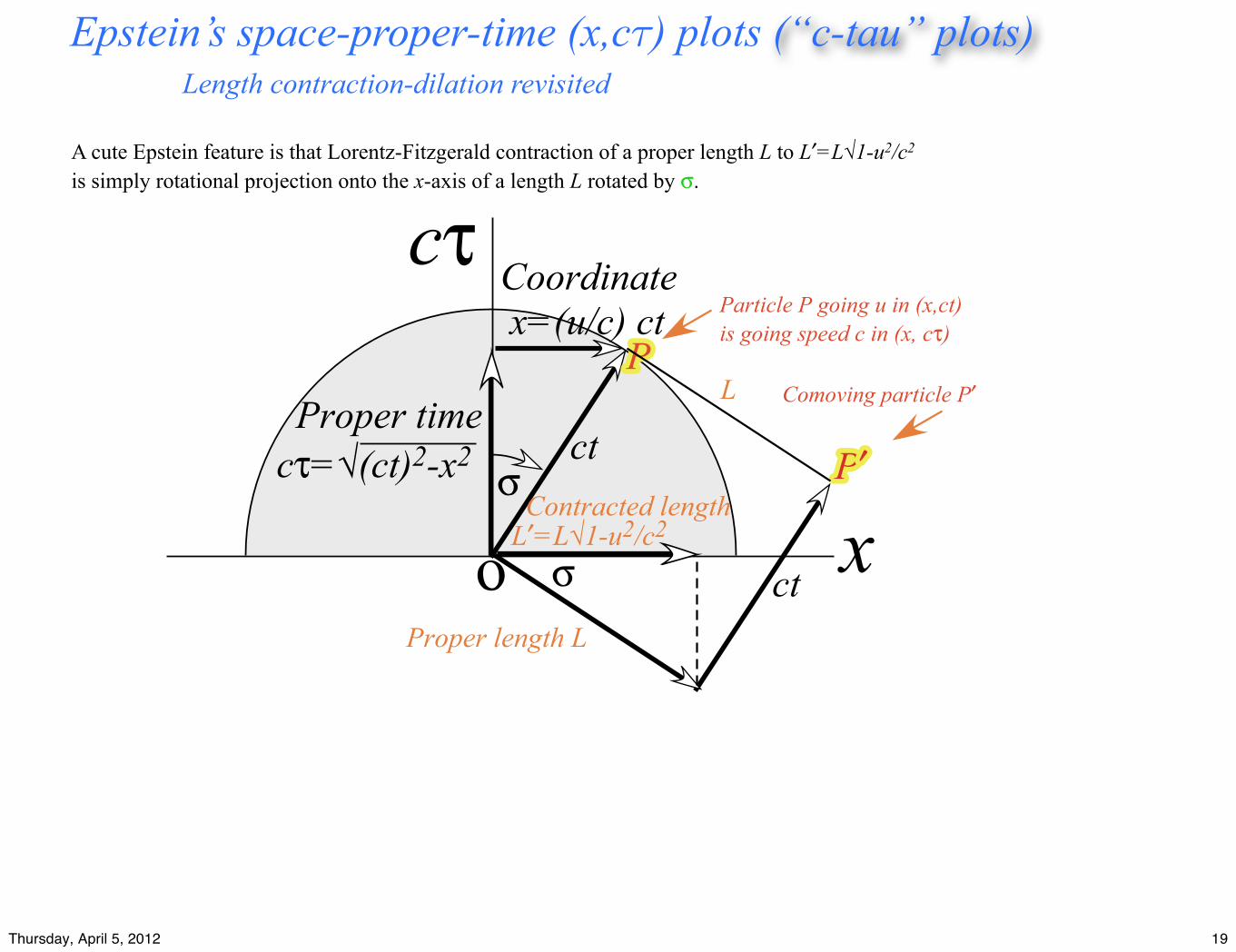
A cute Epstein feature is that Lorentz-Fitzgerald contraction of a proper length L to L′=L√1-u2/c2 is simply rotational projection onto the x-axis of a length L rotated by σ.
σ
Proper timecτ=√(ct)2-x2
Coordinatex=(u/c) ct
cτ
xο
PPParticle P going u in (x,ct)is going speed c in (x, cτ)
PP′′
ctσProper length L
Contracted lengthL′=L√1-u2/c2
L
ctComoving particle P′
Epstein’s space-proper-time (x,cτ) plots (“c-tau” plots)Length contraction-dilation revisited
19Thursday, April 5, 2012
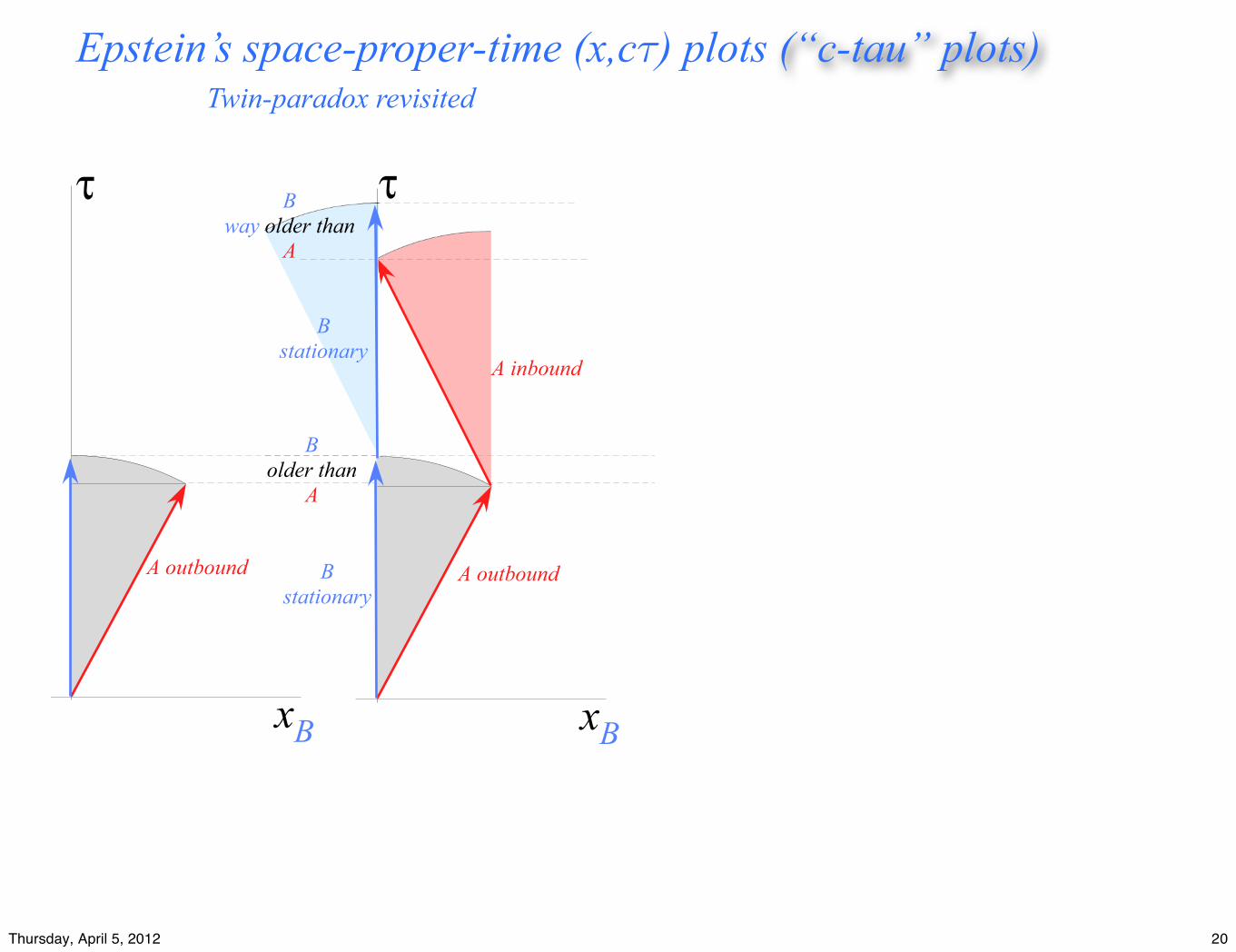
Epstein’s space-proper-time (x,cτ) plots (“c-tau” plots)Twin-paradox revisited
τ
xB xB
τ
A outboundA outbound
A inbound
Bolder than
A
Bstationary
Bstationary
Bway older than
A
20Thursday, April 5, 2012
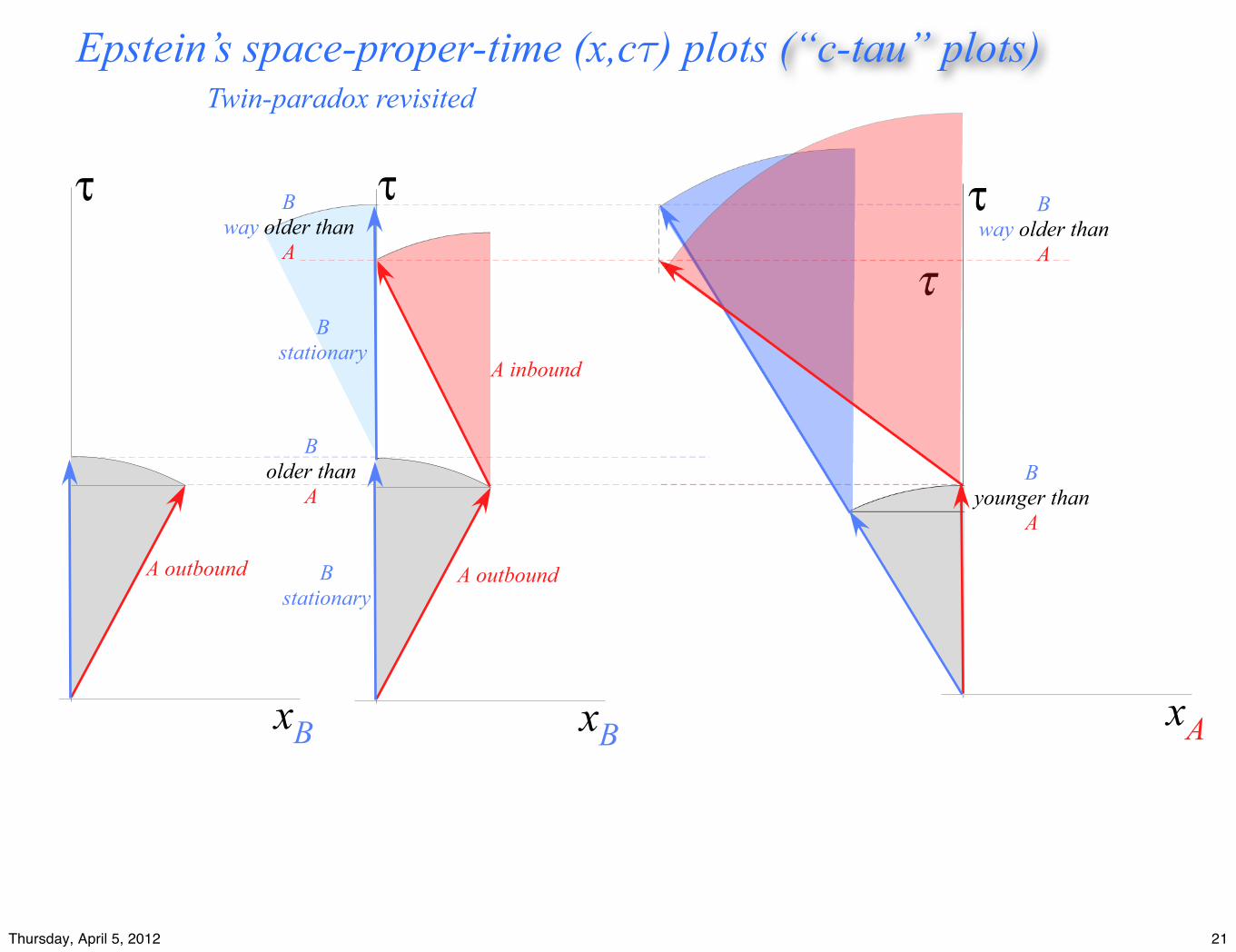
τ
xB xAxB
τ τ
A outboundA outbound
A inbound
Bolder than
A
Bstationary
Bstationary
Bway older than
A
Byounger than
A
Bway older than
A
Epstein’s space-proper-time (x,cτ) plots (“c-tau” plots)Twin-paradox revisited
21Thursday, April 5, 2012
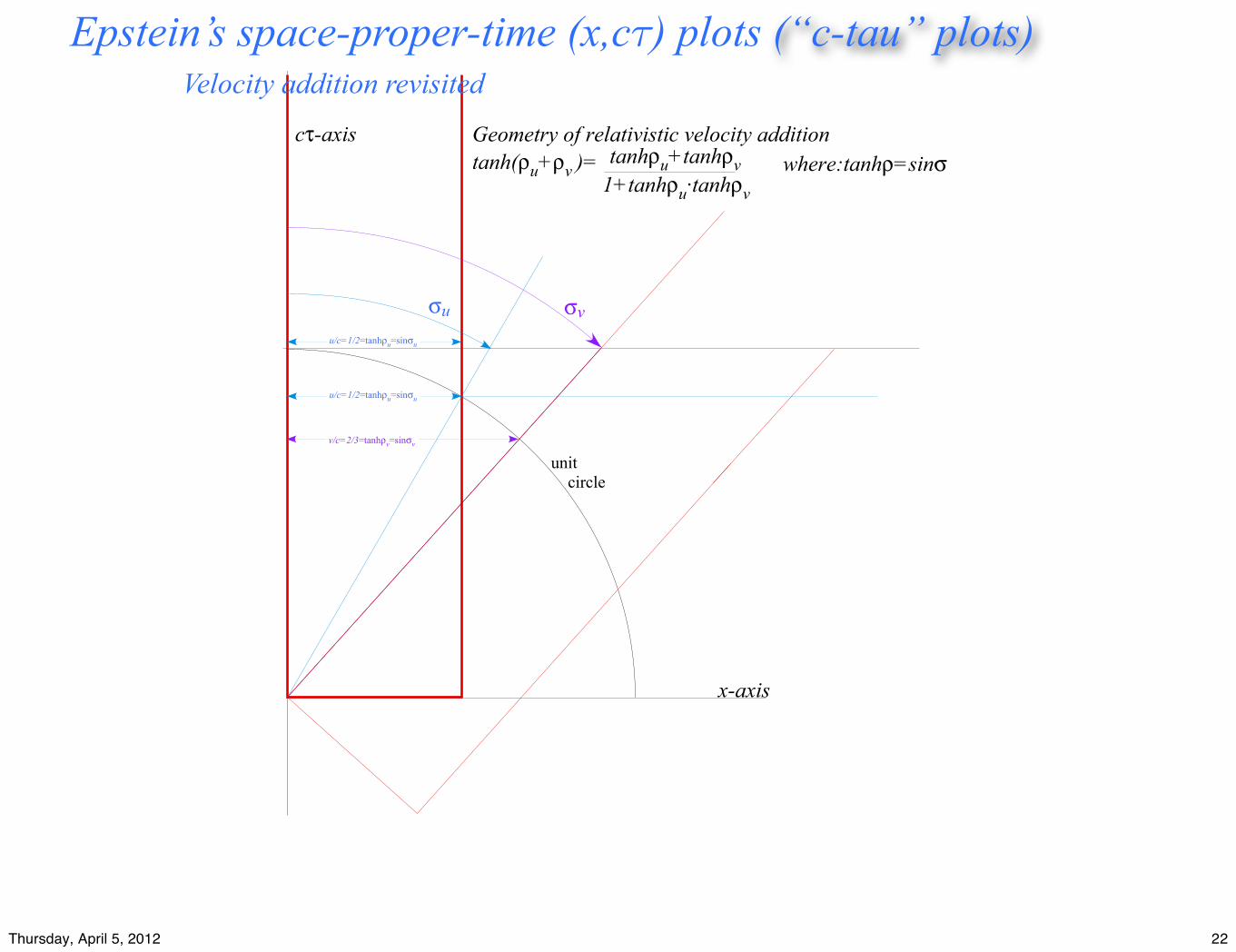
u/c=1/2=tanhρu=sinσu
u/c=1/2=tanhρu=sinσu
v/c=2/3=tanhρv=sinσv
σu σv
unitcircle
x-axis
cτ-axis Geometry of relativistic velocity additiontanh(ρu+ρv )= tanhρu+tanhρv
1+tanhρu·tanhρvwhere:tanhρ=sinσ
Epstein’s space-proper-time (x,cτ) plots (“c-tau” plots)Velocity addition revisited
22Thursday, April 5, 2012
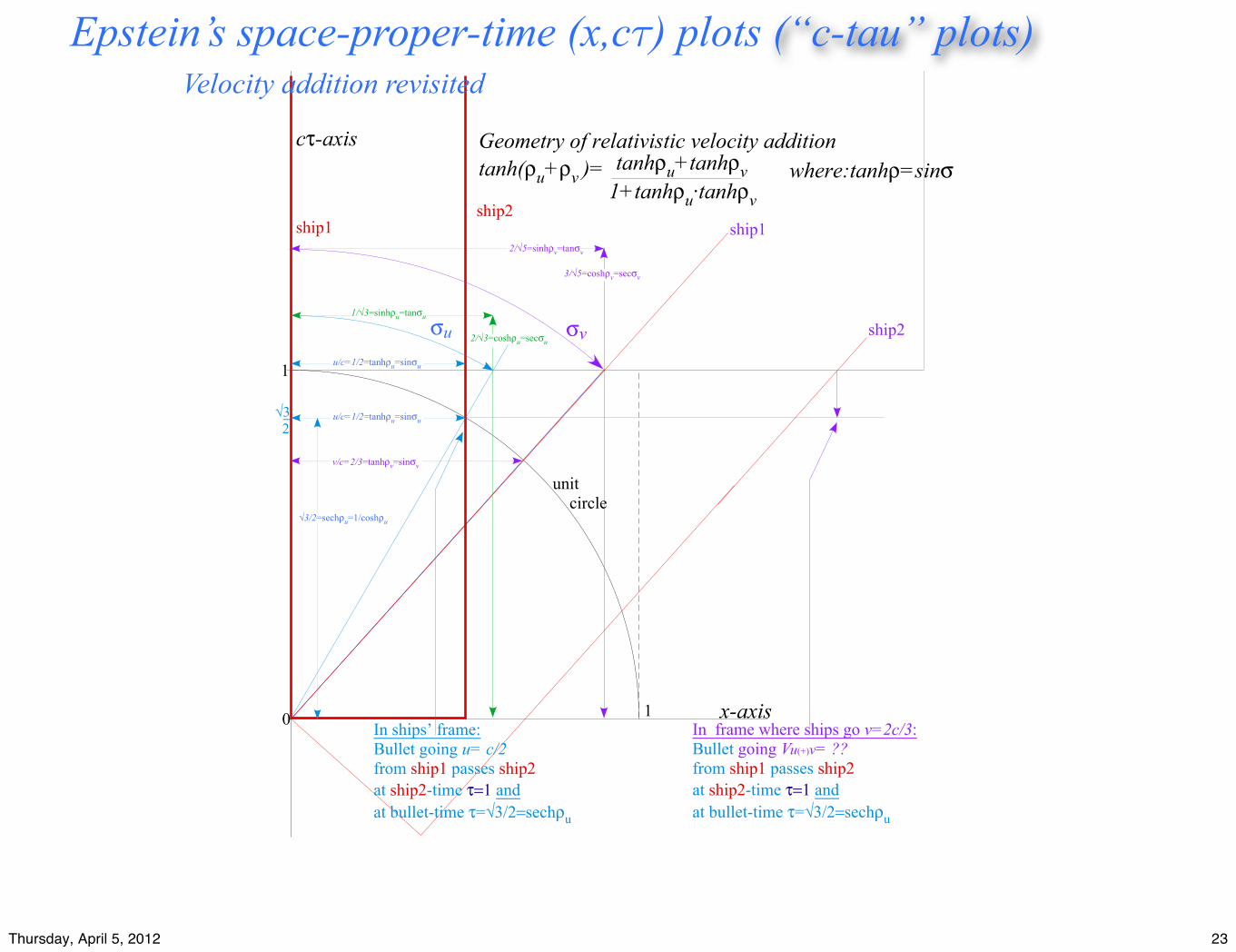
u/c=1/2=tanhρu=sinσu
u/c=1/2=tanhρu=sinσu
v/c=2/3=tanhρv=sinσv
σu σv1/√3=sinhρu=tanσu
√3/2=sechρu=1/coshρu
unitcircle
1
0 1 x-axis
cτ-axis
2/√5=sinhρv=tanσv
3/√5=coshρv=secσv
2/√3=coshρu=secσu
In frame where ships go v=2c/3:Bullet going Vu(+)v= ??from ship1 passes ship2at ship2-time τ=1 andat bullet-time τ=√3/2=sechρu
In ships’ frame:Bullet going u= c/2from ship1 passes ship2at ship2-time τ=1 andat bullet-time τ=√3/2=sechρu
ship1ship2
ship1
ship2
√32
Geometry of relativistic velocity additiontanh(ρu+ρv )= tanhρu+tanhρv
1+tanhρu·tanhρvwhere:tanhρ=sinσ
Epstein’s space-proper-time (x,cτ) plots (“c-tau” plots)Velocity addition revisited
23Thursday, April 5, 2012
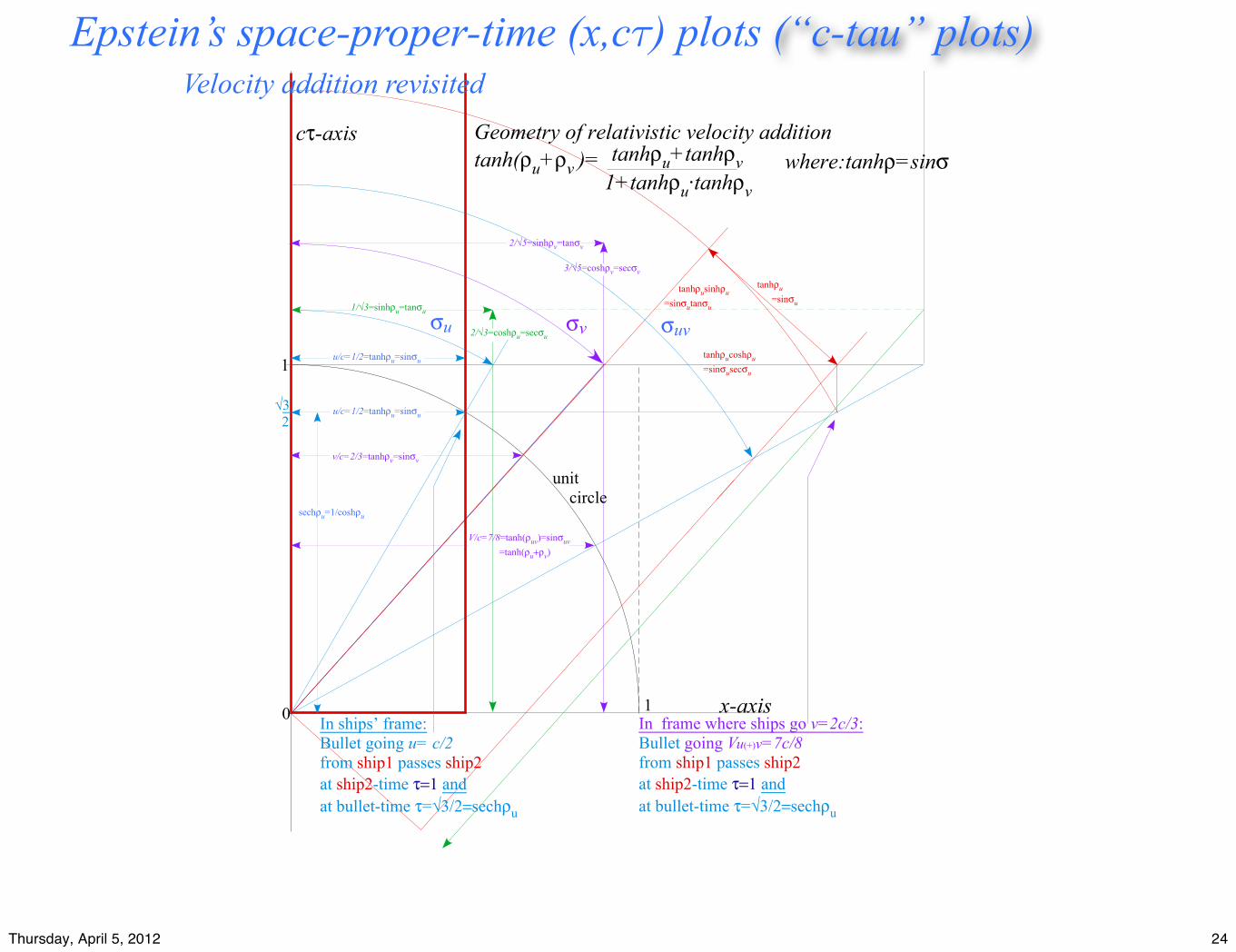
u/c=1/2=tanhρu=sinσu
u/c=1/2=tanhρu=sinσu
v/c=2/3=tanhρv=sinσv
V/c=7/8=tanh(ρuv)=sinσuv=tanh(ρu+ρv)
tanhρu=sinσu
tanhρusinhρu=sinσutanσu
tanhρucoshρu=sinσusecσu
σu σv σuv1/√3=sinhρu=tanσu
sechρu=1/coshρu
unitcircle
1
0 1 x-axis
cτ-axis
2/√5=sinhρv=tanσv
3/√5=coshρv=secσv
2/√3=coshρu=secσu
In frame where ships go v=2c/3:Bullet going Vu(+)v=7c/8from ship1 passes ship2at ship2-time τ=1 andat bullet-time τ=√3/2=sechρu
In ships’ frame:Bullet going u= c/2from ship1 passes ship2at ship2-time τ=1 andat bullet-time τ=√3/2=sechρu
√32
Geometry of relativistic velocity additiontanh(ρu+ρv )= tanhρu+tanhρv
1+tanhρu·tanhρvwhere:tanhρ=sinσ
Epstein’s space-proper-time (x,cτ) plots (“c-tau” plots)Velocity addition revisited
24Thursday, April 5, 2012
u/c=1/2=tanhρu=sinσu
u/c=1/2=tanhρu=sinσu
v/c=2/3=tanhρv=sinσv
V/c=7/8=tanh(ρuv)=sinσuv=tanh(ρu+ρv)
tanhρu=sinσu
tanhρusinhρu=sinσutanσu
tanhρucoshρu=sinσusecσu
σu σv σuv1/√3=sinhρu=tanφu
sechρu=1/coshρu
unitcircle
1
0 1 x-axis
cτ-axis
2/√5=sinhρv=tanσv
3/√5=coshρv=secσv
2/√3=coshρu=secφu
cosh(ρu+ρv)
sinh(ρu+ρv)
(coshρv+tanhρusinhρv)(coshρv+tanhρusinhρv)coshρu=coshρucoshρv+sinhρvsinhρv=cosh(ρu+ρv)=8/√15
coshρusinhρv+sinhρvcoshρv=sinh(ρu+ρv)=7/√15
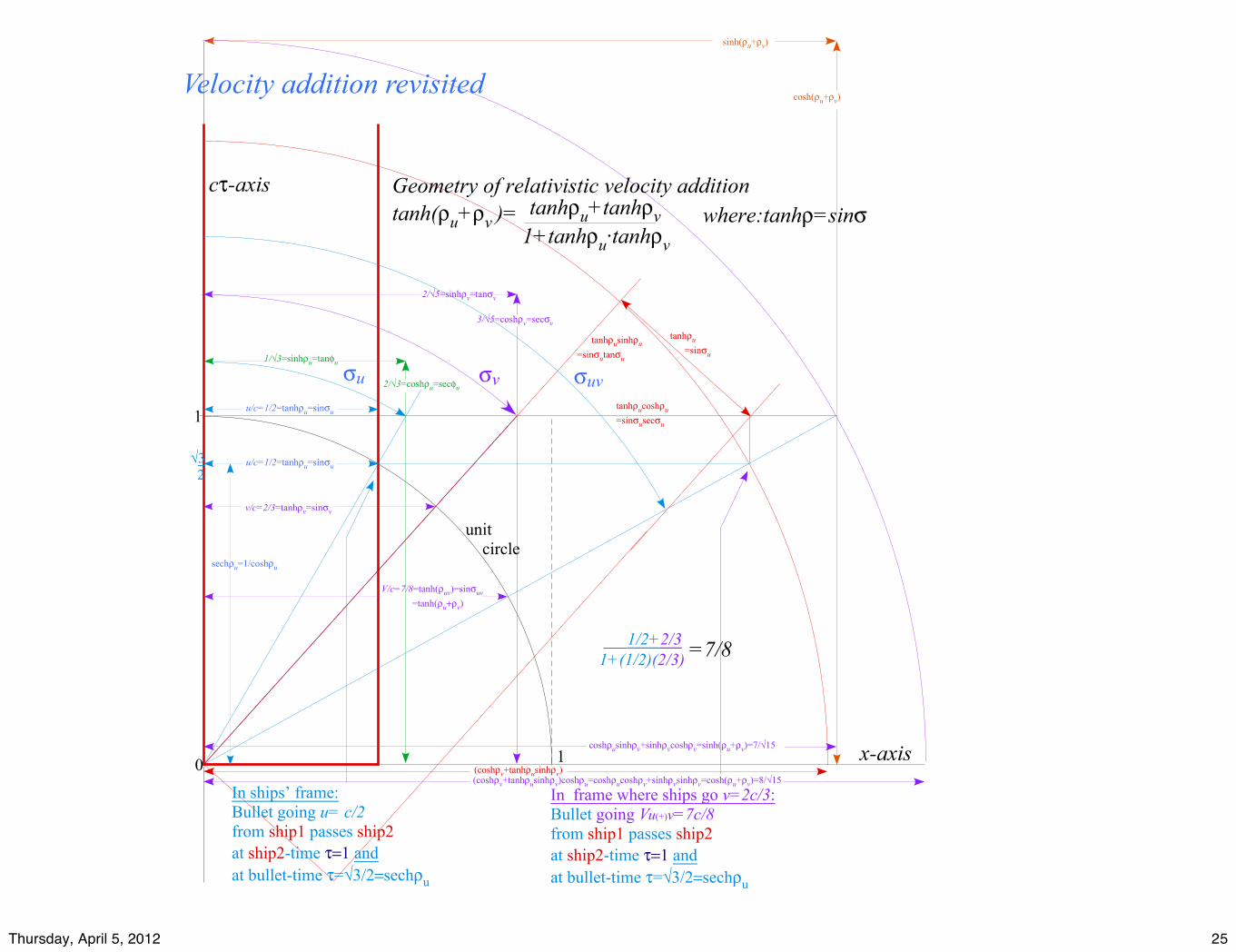
In frame where ships go v=2c/3:Bullet going Vu(+)v=7c/8from ship1 passes ship2at ship2-time τ=1 andat bullet-time τ=√3/2=sechρu
In ships’ frame:Bullet going u= c/2from ship1 passes ship2at ship2-time τ=1 andat bullet-time τ=√3/2=sechρu
1/2+2/31+(1/2)(2/3) =7/8
√32
Geometry of relativistic velocity additiontanh(ρu+ρv )= tanhρu+tanhρv
1+tanhρu·tanhρvwhere:tanhρ=sinσ
Velocity addition revisited
25Thursday, April 5, 2012
u/c=1/2=tanhρu=sinφu
u/c=1/2=tanhρu=sinφu
v/c=2/3=tanhρv=sinφv
V/c=7/8=tanh(ρuv)=sinφuv=tanh(ρu+ρv)
tanhρu=sinφu
tanhρusinhρu=sinφutanφu
tanhρucoshρu=sinφusecφu
φu φv φuv1/√3=sinhρu=tanφu
√3/2=sechρu=1/coshρu
unitcircle
1
0 1 x-axis
cτ-axis
2/√5=sinhρv=tanφv
3/√5=coshρv=secφ v
2/√3=coshρu=secφu
(coshρv+tanhρusinhρv)(coshρv+tanhρusinhρv)coshρu=coshρucoshρv+sinhρvsinhρv=cosh(ρu+ρv)=8/√15
cosh(ρu+ρv)
sinh(ρu+ρv)
coshρusinhρv+sinhρvcoshρv=sinh(ρu+ρv)=7/√15
In frame where ships go v=2c/3:Bullet going Vu(+)v=7c/8from ship1 passes ship2at ship2-time τ=1 andat bullet-time τ=√3/2=sechρu
In ships’ frame:Bullet going u= c/2from ship1 passes ship2at ship2-time τ=1 andat bullet-time τ=√3/2=sechρu
√32
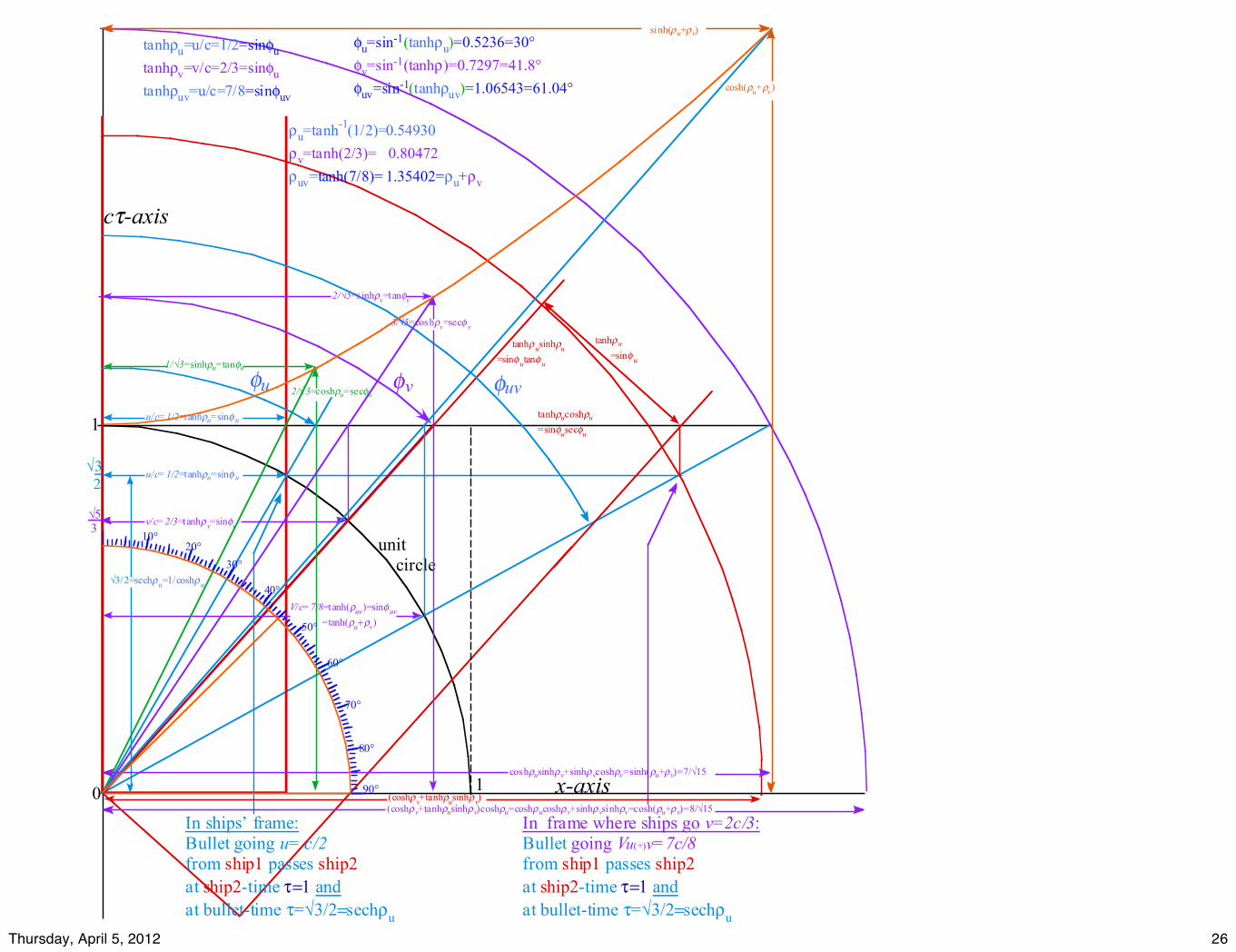
ρu=tanh-1(1/2)=0.54930
ρv=tanh(2/3)= 0.80472ρuv=tanh(7/8)= 1.35402=ρu+ρv
tanhρu=u/c=1/2=sinφutanhρv=v/c=2/3=sinφutanhρuv=u/c=7/8=sinφuv
φu=sin-1(tanhρu)=0.5236=30°
φv=sin-1(tanhρ)=0.7297=41.8°
φuv=sin-1(tanhρuv)=1.06543=61.04°
10°20°
30°
40°
50°
60°
70°
80°
90°
√53
26Thursday, April 5, 2012
A strength (and also, weakness) of CW axioms (1.1-2) is that they are symmetry principles
due to the Lorentz-Poincare isotropy of space-time (invariance to space-time translation in the vacuum).
Operator has plane wave eigenfunctions with roots-of-unity eigenvalues . (5.18a) (5.18b)
This also applies to 2-part or “2-particle” product states where exponents add (k,ω)-values of
each constituent to K=k1+k2 and Ω=ω1+ω2, and -eigenvalues also have that form .
Matrix of T-symmetric evolution U is zero unless and .
T(δ ,τ )
T ψ k ,ω = Aei(kx−ω t) ei(k⋅δ −ω⋅τ )
T ψ k ,ω = ei(k ⋅δ −ω ⋅τ ) ψ k ,ωψ k ,ω T† = ψ k ,ω e−i(k ⋅δ −ω ⋅τ )
ΨK ,Ω =ψ k1,ω1ψ k2 ,ω2
T(δ ,τ ) ei(K ⋅δ −Ω⋅τ )
′Ψ ′K , ′Ω U ΨK ,Ω ′K = ′k1 + ′k2 = K ′Ω = ′ω1 + ′ω2 = Ω
′Ψ ′K , ′Ω U ΨK ,Ω = ′Ψ ′K , ′Ω T†(δ ,τ )UT(δ ,τ ) ΨK ,Ω (if UT = TU for all δ and τ )
= e− i( ′K ⋅δ − ′Ω ⋅τ )ei(K⋅δ −Ω⋅τ ) ′Ψ ′K , ′Ω U ΨK ,Ω = 0 unless: ′K = K and: ′Ω =Ω
Lorentz symmetry effectsHow it makes momentum and energy be conserved
That’s momentum (P=hK) and energy (E=hW) conservation!
27Thursday, April 5, 2012



![Relativity and electromagnetism - University of Oxfordsmithb/website/coursenotes/rel_B.pdf · Chapter 6 Relativity and electromagnetism [Section omitted in lecture-note version.]](https://static.fdocument.org/doc/165x107/5a7eaec47f8b9ae9398eac73/relativity-and-electromagnetism-university-of-oxford-smithbwebsitecoursenotesrelbpdfchapter.jpg)