∆ΟΜΙΚΗ ΑΠΟΚΑΤΑΣΤΑΣΗ ΚΑΙ ΣΤΑΤΙΚΗ ΣΤΕΡΕΩΣΗ …£ΠΥΡΑΚΟΣ.pdf · ΠΕΡΙΓΡΑΦΗ ΤΩΝ ΒΑΣΙΚΩΝ ΜΕΘΟ∆ΩΝ ΕΛΕΓΧΟΥ ΕΠΙ
Upload
ptriantafylloyCategory
view
57download
12description

Σ T
A Τ
Ι Κ Η
Ι

ΣΤΑΤΙΚΗ ΤΩΝ ΚΑΤΑΣΚΕΥΩΝ -Τόμος Ι: ΘΕΜΕΛΙΩΔΕΙΣ ΑΡΧΕΣ ΚΑΙ ΙΣΟΣΤΑΤΙΚΟΙ ΦΟΡΕΙΣ
ΠΡΟΛΟΓΟΣ Ένα σημαντικό τμήμα της εργασίας του δομοστατικού Πολιτικού Μηχανικού συνίσταται στον υπολογισμό των καταστάσεων έντασης και παραμόρφωσης του φέροντα οργανισμού των κατασκευών υπό στατικά φορτία, προκειμένου αυτές να διαστασιολογηθούν με επαρκή ακρίβεια και ασφάλεια.
• Η Στατική των Κατασκευών παλαιότερα και σήμερα
Οι προς τούτο χρησιμοποιούμενες υπολογιστικές μεθοδολογίες επηρεάζονται άμεσα από την εξέλιξη της τεχνολογίας των δομικών υλικών, της τεχνολογίας κατασκευής των φορέων και της τεχνολογίας των υπολογιστικών μέσων. Ιδιαίτερα καταλυτική υπήρξε κατά τις τελευταίες δεκαετίες η επίδραση της εξέλιξης των ηλεκτρονικών υπολογιστών και της παράλληλης ανάπτυξης των μητρωικών υπολογιστικών μεθόδων, με τη βοήθεια των οποίων εκπονούνται σήμερα στην πράξη όλες οι δομοστατικές μελέτες. Ο μελετητής έχει προ πολλού απαλλαγεί από την ανούσια εκτέλεση αριθμητικών πράξεων και μπορεί πλέον να επικεντρώνει το ενδιαφέρον του σε ουσιαστικότερα θέματα μελέτης με στόχο την επίτευξη μιας ασφαλούς και ταυτόχρονα οικονομικής κατασκευής. Άμεση συνέπεια των παραπάνω είναι η μετάθεση του κέντρου βάρους των απαιτούμενων γνώσεων από τη λεπτομερή εκμάθηση γενικών και ειδικών αριθμητικών διαδικασιών σε άλλα θέματα, όπως: (α) στην εξάσκηση εφαρμογής των βασικών κανόνων σωστής μόρφωσης
του φέροντα οργανισμού της κατασκευής, (β) στην εκμάθηση ρεαλιστικότερων μεθόδων προσομοίωσης και
συνειδητοποίησης των πλεονεκτημάτων και μειονεκτημάτων της κάθε μίας,
(γ) στην εμπέδωση των θεμελιωδών αρχών και των υποκείμενων παραδοχών των χρησιμοποιούμενων θεωριών και μεθόδων υπολογισμού, και - τελευταίο, αλλά σημαντικότατο σήμερα -
(δ) στην εξοικείωση με τους τρόπους ελέγχου των αριθμητικών αποτελεσμάτων που προκύπτουν από τη χρήση του ηλεκτρονικού υπολογιστή.
v
Σ T
A Τ
Ι Κ Η
Ι

ΣΤΑΤΙΚΗ ΤΩΝ ΚΑΤΑΣΚΕΥΩΝ -Τόμος Ι: ΘΕΜΕΛΙΩΔΕΙΣ ΑΡΧΕΣ ΚΑΙ ΙΣΟΣΤΑΤΙΚΟΙ ΦΟΡΕΙΣ
Οι σύγχρονες αυτές απαιτήσεις προδιαγράφουν σε μεγάλο βαθμό και τη διαμόρφωση της ύλης ενός συγγράμματος Στατικής των Κατασκευών, το οποίο στοχεύει στην κάλυψη των βασικών γνώσεων που οφείλει να κατέχει ο Πολιτικός Μηχανικός στο γνωστικό πεδίο της κλασικής στατικής. Αρκετές μέθοδοι επίλυσης φορέων, όπως π.χ. οι θαμιστικές μέθοδοι τύπου Cross και Κani, οι οποίες εξυπηρέτησαν τα μέγιστα τον μηχανικό-μελετητή επί σειρά δεκαετιών κατά την προ του ηλεκτρονικού υπολογιστή εποχή, μπορούν πλέον δικαίως να συνταξιοδοτηθούν, όπως σε προηγούμενη χρονική φάση - με την κυκλοφορία των αρχικά μηχανικών και αργότερα ηλεκτρονικών αριθμομηχανών χεριού - έπαυσαν να χρησιμοποιούνται οι γραφικές μέθοδοι υπολογισμού. Επίσης, μπορούν να αγνοηθούν απλές ή σύνθετες εξειδικευμένες μεθοδολογίες που αναπτύχθηκαν με γνώμονα την εξοικονόμηση αριθμητικών πράξεων για επί μέρους κατηγορίες φορέων (π.χ. η εξίσωση των τριών ροπών για συνεχείς δοκούς ή η μέθοδος των ομάδων υπεραρίθμων μεγεθών για σχάρες δοκών). Περιττεύει έτσι η παρουσίαση πολλών ειδικών περιπτώσεων και υποπεριπτώσεων φορέων και φορτίσεων, με τις οποίες παλαιότερα έπρεπε να εξοικειωθεί ο μηχανικός. Αντίθετα, μεγαλύτερη σημασία από ό,τι παλαιότερα οφείλει να δίνεται στα προαναφερθέντα τέσσερα σημεία (α) έως (δ). Βέβαια, σε ένα σύγγραμμα βασικών γνώσεων Στατικής, όπως το παρόν, το κύριο βάρος πέφτει στα δύο τελευταία σημεία, ενώ η διεξοδική πραγμάτευση των δύο πρώτων επαφίεται σε ειδικότερα συγγράμματα που αναφέρονται στοχευμένα στη μόρφωση και προσομοίωση των δομικών κατασκευών.
• Μητρωική Στατική ↔ Κλασική Στατική
Σε αντίθεση με τη μητρωική (ή αφηρημένη) στατική, η οποία εξ αρχής είναι αποκλειστικά προσανατολισμένη στη χρήση ηλεκτρονικού υπολογιστή, η διδασκαλία της κλασικής στατικής έχει ως κέντρο βάρους τον υπολογισμό των φορέων "με το χέρι". Κι αυτό διότι βασικό σκοπό της αποτελούν όχι αυτοί καθαυτοί οι αριθμητικοί υπολογισμοί, αλλά η εμπέδωση των θεμελιωδών στατικών αρχών, μεθόδων και παραδοχών μέσα από τη "χειρονακτική" επίλυση σχετικά απλών στατικών φορέων, καθώς και η παράλληλη απόκτηση μιας "βιωματικής" αντίληψης της λειτουργίας τους. Προς τούτο, η παρουσίαση των βασικών μεθόδων υπολογισμού των μεγεθών έντασης και παραμόρφωσης γίνεται με τη βοήθεια απλών παραδειγμάτων και ακολουθείται από εφαρμογές σε χαρακτηριστικούς για τη δομική πράξη τύπους φορέων, επίπεδων και χωρικών.
• Ανάδειξη της εσωτερικής δομής της Στατικής
Εξίσου σημαντική με την παραπάνω σκιαγραφηθείσα μετάθεση του κέντρου βάρους των απαιτούμενων από τον σημερινό δομοστατικό Πολιτικό Μηχανικό γνώσεων, θεωρώ και την ανάπτυξη της ύλης με τρόπο που να αναδεικνύει με σαφήνεια την ενότητα και εσωτερική συνοχή της Στατικής των Κατασκευών. Η
vi
Σ T
A Τ
Ι Κ Η
Ι

ΣΤΑΤΙΚΗ ΤΩΝ ΚΑΤΑΣΚΕΥΩΝ -Τόμος Ι: ΘΕΜΕΛΙΩΔΕΙΣ ΑΡΧΕΣ ΚΑΙ ΙΣΟΣΤΑΤΙΚΟΙ ΦΟΡΕΙΣ
τελευταία δεν αποτελεί ένα απλό σύνολο διαφόρων μεθοδολογιών και υπολογιστικών διαδικασιών που αναπτύχθηκαν κατά διαστήματα και παρατίθενται με κάποια εξυπηρετική για την εκμάθησή τους σειρά, αλλά ένα συνεκτικό θεωρητικό οικοδόμημα, αξιωματικά θεμελιωμένο, με αλληλουχία μεθόδων και διαδικασιών. Ιδιαίτερη έμφαση δίνεται στην παρουσίαση και χρήση των εργικών προτάσεων (αρχές των δυνατών και των συμπληρωματικών δυνατών έργων) και στον συσχετισμό τους με τις συνθήκες ισορροπίας, συμβιβαστού και υλικής συμπεριφοράς. Η κατανόηση των εργικών προτάσεων και η εξοικείωση με αυτές αποδεικνύεται ιδιαίτερα χρήσιμη όχι μόνο μέσα στο πλαίσιο της κλασικής στατικής, αλλά και για την εν συνεχεία μετάβαση στις σύγχρονες μητρωικές μεθόδους που εφαρμόζονται στην πράξη.
• Τα περιεχόμενα του παρόντος τόμου Ι
Στο ανά χείρας βιβλίο, που αποτελεί τον πρώτο τόμο του συγγράμματος "Στατική των Κατασκευών", αναπτύσσονται συστηματικά οι θεμελιώδεις αρχές της στατικής και παρουσιάζεται με όλες τις απαραίτητες επεξηγήσεις η εφαρμογή τους για τον υπολογισμό ισοστατικών φορέων. Μετά από μια σύντομη εισαγωγή, όπου οριοθετείται το αντικείμενο της στατικής και γίνεται μια συνοπτική ανασκόπηση της ιστορικής της εξέλιξης (κεφ. 1), επεξηγούνται οι βασικές παραδοχές και εξιδανικεύσεις που οδηγούν στα γραμμικά προσομοιώματα των πραγματικών κατασκευών (κεφ. 2), τα οποία αποτελούν το αντικείμενο των μεθόδων επίλυσης που θα αναπτυχθούν στα επόμενα κεφάλαια. Παρόλο που τα θέματα προσομοίωσης, δηλαδή αποτύπωσης των μηχανικών χαρακτηριστικών μιας πραγματικής κατασκευής σε ένα στατικό μοντέλο, αποτελούν αντικείμενο ειδικότερων συγγραμμάτων, παρουσιάζονται και εδώ - σε εισαγωγικό βέβαια επίπεδο - αρκετές πτυχές τους, κάνοντας εκτεταμένη χρήση φωτογραφιών που απεικονίζουν είτε ολόκληρες κατασκευές είτε διάφορες λεπτομέρειές τους. Επιδιώκεται έτσι να δημιουργηθεί στον αναγνώστη ήδη από τα πρώτα του βήματα στη Στατική των Κατασκευών ένα σωστό αισθητήριο για τον τρόπο με τον οποίο προσπαθούμε να "συλλάβουμε" την πραγματική μηχανική συμπεριφορά ενός φορέα μέσω απλοποιημένων γραμμικών προσομοιωμάτων. Στο κεφάλαιο 3 αναπτύσσονται οι θεμελιώδεις αρχές της στατικής των γραμμικών φορέων. Οι αρχές αυτές θα αποτελέσουν τη βάση επί της οποίας θα αναπτυχθούν οι μέθοδοι επίλυσης τόσο των ισοστατικών φορέων (στον παρόντα τόμο Ι) όσο και των υπερστατικών φορέων (στον τόμο ΙΙ). Στα δύο επόμενα κεφάλαια 4 και 5 παρουσιάζονται αναλυτικότερα τα συστατικά δομικά στοιχεία από τα οποία συντίθενται οι γραμμικοί φορείς (ακριβέστερα: τα στοιχεία από τα οποία συντίθενται τα γραμμικά προσομοιώματα των πραγματικών φορέων), οι ιδιότητές τους και οι βασικές ιδέες που χρησιμοποιούνται για τον υπολογισμό τους. Με δεδομένα πλέον όλα τα απαιτούμενα βασικά γνωστικά "εργαλεία" αναπτύσσονται στο κεφάλαιο 6 λεπτομερέστερα οι μέθοδοι υπολογισμού των
vii
Σ T
A Τ
Ι Κ Η
Ι

ΣΤΑΤΙΚΗ ΤΩΝ ΚΑΤΑΣΚΕΥΩΝ -Τόμος Ι: ΘΕΜΕΛΙΩΔΕΙΣ ΑΡΧΕΣ ΚΑΙ ΙΣΟΣΤΑΤΙΚΟΙ ΦΟΡΕΙΣ
εντασιακών μεγεθών ισοστατικών φορέων, οι οποίες - χάριν περαιτέρω εμπέδωσής τους - εφαρμόζονται στο κεφάλαιο 7 σε μία σειρά χαρακτηριστικών τύπων ισοστατικών φορέων που συναντάμε συχνά στη δομική πράξη. Οι διάφορες εφαρμογές συνοδεύονται από αρκετές φωτογραφίες, έτσι ώστε να αρχίσει να αναπτύσσεται στον αναγνώστη μια σωστή αίσθηση εγγύτητας των επιλυόμενων στατικών φορέων προς τις πραγματικές κατασκευές που αυτοί προσομοιώνουν. Προκειμένου να αναπτυχθούν στη συνέχεια οι μέθοδοι υπολογισμού των παραμορφωσιακών μεγεθών (κεφ. 9), παρουσιάζονται στο κεφάλαιο 8 οι εργικές και ενεργειακές αρχές και προτάσεις της στατικής, ορισμένες από τις οποίες μπορούν να χρησιμοποιηθούν με πλεονεκτικό τρόπο και για τον υπολογισμό εντασιακών μεγεθών. Τέλος, στα δύο τελευταία κεφάλαια του παρόντος τόμου Ι αναπτύσσονται οι μέθοδοι υπολογισμού γραμμών επιρροής μεγεθών έντασης (κεφ. 10) και μεγεθών παραμόρφωσης (κεφ. 11) ισοστατικών φορέων. Οι υπερστατικοί φορείς και οι σχετικές μέθοδοι υπολογισμού τους αποτελούν, όπως προαναφέρθηκε, αντικείμενο του τόμου ΙΙ του συγγράμματος. Με στόχο την ανετότερη κατανόηση των διαφόρων παρουσιαζόμενων θεμάτων γίνονται σε διάφορα σημεία του κειμένου επί μέρους υπενθυμίσεις (με μικρότερους χαρακτήρες) και συχνά εφιστάται μέσω ιδιαίτερων παρατηρήσεων η προσοχή του αναγνώστη σε αντικείμενα μεγαλύτερης σημασίας. Επίσης, θεωρήθηκε χρήσιμο να συμπεριληφθούν ως υποσημειώσεις αρκετές ιστορικές και σύντομες βιογραφικές αναφορές, οι οποίες προσφέρουν στον αναγνώστη μια (έστω στοιχειώδη) ενημέρωση για τη συνεισφορά των σημαντικότερων ερευνητών στην ιστορική εξέλιξη της Στατικής. Αντίθετα, δεδομένου ότι η αναπτυσσόμενη εδώ ύλη της κλασικής στατικής είναι προ πολλού κωδικοποιημένη επιστημονικά, δεν κρίθηκε αναγκαία η συστηματική παραπομπή σε βιβλιογραφικές πηγές. Εντούτοις, για επί μέρους θέματα ειδικού ενδιαφέροντος γίνονται κατά περίπτωση αναφορές σε πρωτότυπες ή ιδιαίτερα σημαντικές εργασίες, ενώ στο τέλος του βιβλίου αναφέρονται ορισμένα αξιόλογα συγγράμματα προς περαιτέρω εμβάθυνση.
• Επισήμανση προς τους σπουδαστές
Απευθυνόμενος προς τους νέους σπουδαστές θα ήθελα να τονίσω ότι η Στατική δεν μαθαίνεται με απλή ανάγνωση της θεωρίας ή έτοιμων λυμένων ασκήσεων. Αντίθετα, απαιτείται η αυτοδύναμη "χειροκίνητη" επίλυση με χαρτί και με μολύβι μιας αρκετά μεγάλης σειράς αντιπροσωπευτικών προβλημάτων, προκειμένου να συνειδητοποιηθούν πλήρως τόσο οι μέθοδοι επίλυσης και οι παραδοχές τους, όσο και οι τρόποι ελέγχου των αριθμητικών αποτελεσμάτων. Επισημαίνεται επίσης με έμφαση ότι η χρήση σύγχρονων "στατικών προγραμμάτων" στον ηλεκτρονικό υπολογιστή για την επίλυση φορέων και, γενικότερα, για την εκπόνηση μελετών φέροντος οργανισμού στη δομική πράξη καθίσταται επισφαλής χωρίς την επαρκή
viii
Σ T
A Τ
Ι Κ Η
Ι

ΣΤΑΤΙΚΗ ΤΩΝ ΚΑΤΑΣΚΕΥΩΝ -Τόμος Ι: ΘΕΜΕΛΙΩΔΕΙΣ ΑΡΧΕΣ ΚΑΙ ΙΣΟΣΤΑΤΙΚΟΙ ΦΟΡΕΙΣ
συνειδητοποίηση των διαδικασιών επίλυσης και κυρίως των υποκείμενων παραδοχών τους.
• Ευχαριστίες
Στο σημείο αυτό θα ήθελα να ευχαριστήσω τον επί πολλά έτη συνεργάτη μου και συν-συγγραφέα των δύο τόμων ασκήσεων που πλαισιώνουν τους δύο τόμους θεωρίας του παρόντος συγγράμματος Δρ Πολιτικό Μηχανικό Κ. Ε. Μορφίδη τόσο για την επιστημονική, όσο και για την πολύτιμη τεχνική συνδρομή του στην ολοκλήρωση του ανά χείρας τόμου. Θερμές ευχαριστίες εκφράζω επίσης προς τον συνάδελφο στο Εργαστήριο Στατικής και Δυναμικής των Κατασκευών του Τμήματος Πολιτικών Μηχανικών του ΑΠΘ Χάρη Ξενίδη, αναπληρωτή καθηγητή, προς τους πολιτικούς μηχανικούς Κώστα Κωστινάκη, Γρηγόρη Μανούκα και Βασίλη Τσιγγέλη, υποψήφιους διδάκτορες στο Εργαστήριο Στατικής και Δυναμικής των Κατασκευών, και προς την Κωνσταντίνα Αναστασιάδου, μεταπτυχιακή φοιτήτρια, για τη σημαντική βοήθειά τους στον έλεγχο του τελικού χειρογράφου. Tον Βασίλη Τσιγγέλη ευχαριστώ ιδιαιτέρως και για τον συστηματικό έλεγχο των αριθμητικών παραδειγμάτων. Ευχαριστώ επίσης τον πολιτικό μηχανικό Μανώλη Μπάμπουκα για την παραχώρηση ορισμένων φωτογραφιών από έργα που μελέτησε και επέβλεψε. Τέλος, επιθυμώ να ευχαριστήσω τον εκδοτικό οίκο "Σοφία", για τη φροντίδα με την οποία ανέλαβε την έκδοση του παρόντος τόμου.
Θεσσαλονίκη, Μάιος 2009
ix
Σ T
A Τ
Ι Κ Η
Ι

ΣΤΑΤΙΚΗ ΤΩΝ ΚΑΤΑΣΚΕΥΩΝ -Τόμος Ι: ΘΕΜΕΛΙΩΔΕΙΣ ΑΡΧΕΣ ΚΑΙ ΙΣΟΣΤΑΤΙΚΟΙ ΦΟΡΕΙΣ
x
Σ T
A Τ
Ι Κ Η
Ι

ΣΤΑΤΙΚΗ ΤΩΝ ΚΑΤΑΣΚΕΥΩΝ -Τόμος Ι: ΘΕΜΕΛΙΩΔΕΙΣ ΑΡΧΕΣ ΚΑΙ ΙΣΟΣΤΑΤΙΚΟΙ ΦΟΡΕΙΣ
ΠΙΝΑΚΑΣ ΠΕΡΙΕΧΟΜΕΝΩΝ
σελ.
ΕΠΕΞΗΓΗΜΑΤΙΚΟ ΣΗΜΕΙΩΜΑ ....................................................................... xxv
ΚΑΤΑΛΟΓΟΣ ΣΥΜΒΟΛΩΝ .............................................................................. xxvi
1. ΤΟ ΑΝΤΙΚΕΙΜΕΝΟ ΤΗΣ ΣΤΑΤΙΚΗΣ ΤΩΝ ΚΑΤΑΣΚΕΥΩΝ ...................... 1-1
1.1 Ο ρόλος της Στατικής στον σχεδιασμό των κατασκευών .................... 1-3
1.1.1 Οι τρεις θεμελιώδεις απαιτήσεις της Δομικής Τέχνης .................................... 1-3
1.1.2 Η ασφάλεια των Κατασκευών ως κοινωνική απαίτηση και η Στατική Μελέτη .... 1-3
1.1.3 Τα αντικείμενα της Στατικής των Κατασκευών .............................................. 1-5
1.1.4 Αρχιμάστορας - Αρχιτέκτονας - Πολιτικός Μηχανικός: Παρελθόν και παρόν ... 1-6
1.2 Η Στατική ως υποσύνολο της Μηχανικής ............................................. 1-10
1.2.1 Aπαρχές και θεμελίωση της Μηχανικής και της Στατικής των Κατασκευών ...... 1-10
1.2.2 Υποδιαιρέσεις της Μηχανικής .................................................................... 1-13
1.3 Το αντικείμενο και οι υποδιαιρέσεις της Στατικής των Κατασκευών . 1-15
1.4 Ο ρόλος του ηλεκτρονικού υπολογιστή και του λογισμικού ............... 1-17
2. ΟΙ ΚΑΤΑΣΚΕΥΕΣ ΚΑΙ ΤΑ ΠΡΟΣΟΜΟΙΩΜΑΤΑ ΤΟΥΣ ............................. 2-1
2.1 Το δομικό σύστημα και το υπολογιστικό του προσομοίωμα ............. 2-3
2.1.1 Ορισμός του δομικού συστήματος .............................................................. 2-3
2.1.2 Μηχανικό και υπολογιστικό προσομοίωμα .................................................. 2-4
2.1.3 Η αρχή της αρμονικής ακρίβειας ................................................................ 2-4
2.1.4 Απλοποιημένο παράδειγμα μηχανικού προσομοιώματος .............................. 2-5
2.1.5 Προσομοιώσεις υλικών σωμάτων ............................................................... 2-8
2.2 Τα είδη των δομικών στοιχείων και η γεωμετρική εξιδανίκευσή τους 2-9
2.2.1 Μονοδιάστατα ή ραβδόμορφα ή γραμμικά στοιχεία .................................. 2-9
2.2.2 Δισδιάστατα ή επιφανειακά στοιχεία ........................................................ 2-10
2.2.3 Τρισδιάστατα στοιχεία ή στοιχεία όγκου .................................................. 2-10
2.3 Τα φέροντα χαρακτηριστικά των δομικών στοιχείων .......................... 2-11
2.3.1 Γραμμικά στοιχεία .................................................................................. 2-11
2.3.2 Επιφανειακά στοιχεία ............................................................................. 2-19
2.3.3 Στοιχεία όγκου ....................................................................................... 2-21
2.4 Η προσομοίωση συνδέσεων και στηρίξεων .......................................... 2-23
2.4.1 Συνδέσεις δομικών στοιχείων .................................................................. 2-24
A. Μονολιθικές συνδέσεις ............................................................................ 2-24
xi
Σ T
A Τ
Ι Κ Η
Ι

ΣΤΑΤΙΚΗ ΤΩΝ ΚΑΤΑΣΚΕΥΩΝ -Τόμος Ι: ΘΕΜΕΛΙΩΔΕΙΣ ΑΡΧΕΣ ΚΑΙ ΙΣΟΣΤΑΤΙΚΟΙ ΦΟΡΕΙΣ
B. Αρθρωτές συνδέσεις και ενδόσιμες συνδέσεις ............................................ 2-26
2.4.2 Στηρίξεις γραμμικών στοιχείων στα θεμέλια και στο έδαφος ..................... 2-37
A. Η προσομοίωση του εδάφους θεμελίωσης ................................................. 2-38
B. Η προσομοίωση του φορέα θεμελίωσης .................................................... 2-39
Γ. Μονολιθικές, αρθρωτές και ελαστικές στηρίξεις ........................................... 2-41
2.5 Στατικά συστήματα δομικών φορέων - Εισαγωγική παρουσίαση .... 2-51
2.5.1 Γραμμικοί δομικοί φορείς και τα προσομοιώματά τους ............................. 2-51
Α. Δοκοί ενός ή περισσότερων ανοιγμάτων .................................................... 2-51
Β. Δικτυωτοί φορείς ..................................................................................... 2-57
Γ. Πλαισιακοί φορείς .................................................................................... 2-61
Δ. Εσχάρες δοκών ...................................................................................... 2-66
Ε. Τοξωτοί φορείς ....................................................................................... 2-68
ΣΤ. Δοκοί ενισχυμένες με συρμούς ράβδων ................................................... 2-74
Ζ. Καλωδιωτοί φορείς .................................................................................. 2-76
2.5.2 Επιφανειακοί φορείς, φορείς όγκου και μικτοί φορείς ............................... 2-87
Α. Δίσκοι - Πλάκες - Μικτοί κτιριακοί φορείς ................................................... 2-87
Β. Ισοδύναμα γραμμικά προσομοιώματα μικτών κτιριακών φορέων .................. 2-94
Γ. Πτυχωτοί / πολυεδρικοί φορείς .................................................................. 2-98
Δ. Κελυφωτοί φορείς ................................................................................... 2-99
Ε. Πνευστές κατασκευές - Μεμβράνες ........................................................... 2-102
ΣΤ. Φορείς όγκου ........................................................................................ 2-103
2.5.3 Η εξέλιξη των κατασκευών - Σύντομη ιστορική επισκόπιση ...................... 2-105
Α. Από την αρχαιότητα έως την πτώση της ρωμαϊκής αυτοκρατορίας (476 μ.Χ.) .. 2-105
Β. Η μεσαιωνική περίοδος (~500-1450) ......................................................... 2-108
Γ. Η περίοδος της Αναγέννησης (~1450-1700) ............................................... 2-109
Δ. Η περίοδος της βιομηχανικής επανάστασης (~1700-1850) ........................... 2-111
Ε. Η σύγχρονη περίοδος (~1850-σήμερα) ...................................................... 2-133
2.6 Οι φορτίσεις των κατασκευών και το υπολογιστικό τους προσομοίωμα ......................................................................................... 2-115
2.6.1 Κατηγορίες δράσεων .............................................................................. 2-115
2.6.2 Η υπολογιστική προσομοίωση των δράσεων .......................................... 2-118
Α. Χαρακτηριστικές τιμές των δράσεων ......................................................... 2-118
Β. Οριακές καταστάσεις ............................................................................... 2-118
Γ. Συνδυασμοί δράσεων .............................................................................. 2-118
Δ. Σχετικά με την εξιδανίκευση των φορτίσεων ............................................... 2-118
2.7 Οι στόχοι και η πορεία μιας δομοστατικής μελέτης ............................. 2-123
2.8 Οριοθέτηση του περιεχομένου του βιβλίου .......................................... 2-125
xii
Σ T
A Τ
Ι Κ Η
Ι

ΣΤΑΤΙΚΗ ΤΩΝ ΚΑΤΑΣΚΕΥΩΝ -Τόμος Ι: ΘΕΜΕΛΙΩΔΕΙΣ ΑΡΧΕΣ ΚΑΙ ΙΣΟΣΤΑΤΙΚΟΙ ΦΟΡΕΙΣ
3. ΘΕΜΕΛΙΩΔΕΙΣ ΑΡΧΕΣ ΤΗΣ ΣΤΑΤΙΚΗΣ ΤΩΝ ΓΡΑΜΜΙΚΩΝ ΦΟΡΕΩΝ 3-1
3.1 Εισαγωγή ................................................................................................. 3-3
3.1.1 Σχεδιασμός. προσομοίωση και υπολογισμός δομικών φορέων ............... 3-3
3.1.2 Η αξιωματική θεμελίωση της Στατικής ..................................................... 3-4
3.1.3 Η Στατική των Γραμμικών Φορέων και η Γραμμική Στατική ...................... 3-7
3.1.4 Τα βασικά στατικά μεγέθη ...................................................................... 3-8
3.1.5 Οι τρεις βασικές συνθήκες της Στατικής ................................................. 3-9
3.2 Οι συνθήκες ισορροπίας ........................................................................ 3-10
3.2.1 Περί δυνάμεων και συστημάτων αναφοράς ............................................. 3-10
3.2.2 Τα αξιώματα της Στερεοστατικής ............................................................ 3-12
A. Αξίωμα αδράνειας (1ο αξίωμα του Νεύτωνα) .............................................. 3-12
B. Αξίωμα της ολισθησιμότητας των δυνάμεων (Aρχή του Varignon) ................ 3-12
Γ. Αξίωμα της ισότητας δράσης και αντίδρασης (3ο αξίωμα του Νεύτωνα) ......... 3-13
Δ. Αρχή του παραλληλογράμμου για τη σύνθεση δυνάμεων (Nόμος του Stevin) 3-14
3.2.3 Δυνάμεις, ροπές και συνθήκες ισορροπίας .............................................. 3-14
Α. Συνθήκες ισορροπίας ενός υλικού σημείου ................................................ 3-15
Β. Η έννοια της ροπής και του ζεύγους δυνάμεων .......................................... 3-15
Γ. Συνθήκες ισορροπίας ενός υλικού σώματος ............................................... 3-17
Δ. Η ισορροπία ενός δομικού φορέα - Εξωτερικά εντασιακά μεγέθη .................. 3-18
3.2.4 Η στήριξη ενός δομικού φορέα ............................................................... 3-21
Α. Η στήριξη του δίσκου στο επίπεδο ............................................................ 3-21
Β. Η στήριξη του σώματος στον χώρο ........................................................... 3-34
Γ. Εποπτικός, υπολογιστικός και σχεδιαστικός έλεγχος της στερεότητας στήριξης 3-51
Δ. Στήριξη σύνθετων δομικών φορέων ......................................................... 3-51
Ε. Σημείωση σχετικά με την ορολογία ........................................................... 3-52
3.2.5 Τα εξωτερικά εντασιακά μεγέθη γραμμικών φορέων ................................ 3-53
Α. Τα εξωτερικά φορτία γραμμικών φορέων ................................................... 3-53
Β. Οι αντιδράσεις στήριξης ........................................................................... 3-58
Γ. Ο υπολογισμός των αντιδράσεων στήριξης ενός δίσκου/σώματος ................ 3-62
Δ. Απλά αριθμητικά παραδείγματα και συμπληρωματικές παρατηρήσεις .......... 3-64
Ε. Υπολογιστικός έλεγχος της στερεότητας στήριξης ενός δίσκου/σώματος ...... 3-82
3.2.6 Εσωτερικά εντασιακά μεγέθη γραμμικών φορέων ................................... 3-84
Α. Η μέθοδος των διαχωριστικών τομών ....................................................... 3-84
Β. Τα φορτία διατομής γραμμικών στοιχείων .................................................. 3-87
Γ. Φορτία διατομής συνοριακών διατομών και αντιδράσεις στηρίξεων ............... 3-93
Δ. Υπολογισμός φορτίων διατομής με τις συνθήκες ισορροπίας ....................... 3-94
Ε. Τα διαγράμματα των φορτίων διατομής - Υπολογισμός και σχεδίαση ............ 3-101
3.2.7 Η διάκριση μεταξύ ισοστατικών και υπερστατικών φορέων ...................... 3-105
3.2.8 Θεωρία 1ης τάξης και θεωρίες ανωτέρων τάξεων ..................................... 3-106
3.2.9 Η αρχή της επαλληλίας ......................................................................... 3-110
xiii
Σ T
A Τ
Ι Κ Η
Ι

ΣΤΑΤΙΚΗ ΤΩΝ ΚΑΤΑΣΚΕΥΩΝ -Τόμος Ι: ΘΕΜΕΛΙΩΔΕΙΣ ΑΡΧΕΣ ΚΑΙ ΙΣΟΣΤΑΤΙΚΟΙ ΦΟΡΕΙΣ
3.2.10 Οι διαφορικές εξισώσεις ισορροπίας του γραμμικού στοιχείου ............... 3-112
Α. Η κατάστρωση των διαφορικών εξισώσεων 1ης τάξης ................................. 3-112
Β. Η αποσύζευξη της κάμψης-διάτμησης από τη διάταση και τη στρέψη ........... 3-116
Γ. Ιδιότητες των διαγραμμάτων φορτίων διατομής .......................................... 3-116
Δ. Η ολοκλήρωση των διαφορικών εξισώσεων ισορροπίας .............................. 3-116
Ε. Τα μητρώα μεταβίβασης φορτίων διατομής ................................................ 3-120
ΣΤ. Ανεξάρτητα και εξαρτημένα φορτία διατομής ............................................ 3-122
3.3 Οι συνθήκες συμβιβαστού ...................................................................... 3-124
3.3.1 Εξωτερικά παραμορφωσιακά μεγέθη γραμμικών φορέων ........................ 3-124
3.3.2 Oι έννοιες του μηχανικού έργου και της εργικής ανταπόκρισης ................ 3-126
3.3.3 Οι παραμορφώσεις των υλικών σωμάτων ............................................... 3-131
3.3.4 Οι συνθήκες συμβιβαστού των παραμορφώσεων υλικών σωμάτων ......... 3-132
3.3.5 Τα εσωτερικά παραμορφωσιακά μεγέθη γραμμικών φορέων ................... 3-135
Α. Αμιγής διάταση - Επιμήκυνση/επιβράχυνση ............................................... 3-135
Β. Αμιγής κάμψη - Καμπύλωση .................................................................... 3-135
Γ. Αμιγής διάτμηση - Ολίσθηση .................................................................... 3-138
Δ. Αμιγής στρέψη - Συστροφή ...................................................................... 3-139
Ε. Σύνοψη εργικώς ανταποκρινόμενων εσωτερικών μεγεθών .......................... 3-140
ΣΤ. Παθητικό και ίδιο εσωτερικό έργο παραμόρφωσης ................................... 3-140
3.3.6 Οι διαφορικές εξισώσεις συμβιβαστού του επίπεδου γραμμικού στοιχείου 3-142
Α. Η σχέση βύθισης - στροφής (w-φ) για τη δοκό Bernoulli .............................. 3-143
Β. Η σχέση βύθισης-στροφής-ολίσθησης (w-φ-γ) για τη δοκό Timoshenko ........ 3-144
Γ. Η ολοκλήρωση των διαφορικών εξισώσεων ............................................... 3-146
Δ. Τα μητρώα μεταβίβασης μετακινήσεων ..................................................... 3-147
Ε. Σύγκριση των μητρώων μεταβίβασης φορτίων διατομής και των μητρώων μεταβίβασης μετακινήσεων ...................................................................... 3-148
3.3.7 Καταναγκασμένα παραμορφωσιακά μεγέθη γραμμικών φορέων ............. 3-149
Α. Καταναγκασμένες μετακινήσεις στηρίξεων ................................................ 3-149
Β. Καταναγκασμένες παραμορφώσεις .......................................................... 3-151
3.4 Οι συνθήκες υλικής συμπεριφοράς ...................................................... 3-154
3.4.1 Η πραγματική υλική συμπεριφορά των δομικών υλικών .......................... 3-154
Α. Πείραμα εφελκυσμού σε δοκίμια χάλυβα ................................................... 3-154
Β. Πείραμα θλίψης σε δοκίμια σκυροδέματος ................................................. 3-157
3.4.2 Η γραμμικώς ελαστική υλική συμπεριφορά ............................................. 3-159
3.4.3 Οι νόμοι γραμμικώς ελαστικής συμπεριφοράς γραμμικών στοιχείων ........ 3-164
Α. Αμιγής διάταση ...................................................................................... 3-164
Β. Αμιγής κάμψη ........................................................................................ 3-164
Γ. Αμιγής διάτμηση ..................................................................................... 3-166
Δ. Αμιγής στρέψη ........................................................................................ 3-172
3.4.4 Υλική συμπεριφορά λόγω θερμοκρασιακών μεταβολών .......................... 3-173
xiv
Σ T
A Τ
Ι Κ Η
Ι

ΣΤΑΤΙΚΗ ΤΩΝ ΚΑΤΑΣΚΕΥΩΝ -Τόμος Ι: ΘΕΜΕΛΙΩΔΕΙΣ ΑΡΧΕΣ ΚΑΙ ΙΣΟΣΤΑΤΙΚΟΙ ΦΟΡΕΙΣ
3.4.5 Χρονικώς μεταβαλλόμενη υλική συμπεριφορά ........................................ 3-175
3.4.6 Σύνοψη .................................................................................................. 3-178
3.5 Οι υπολογιστικές θεωρίες της Στατικής ................................................ 3-182
3.5.1 Ταξινόμηση των υπολογιστικών θεωριών βάσει των παραδοχών γραμμικοποίησης …............................................................................... 3-182
Α. Θεωρία 1ης τάξης ................................................................................. 3-182
Β. Θεωρία 2ης τάξης ................................................................................. 3-186
Γ. Θεωρία 3ης τάξης .................................................................................. 3-187
Δ. Ελαστική ευστάθεια ............................................................................... 3-187 3.5.2 Οι επιλύουσες διαφορικές εξισώσεις της ελαστικής θεωρίας 1ης τάξης για
επίπεδους γραμμικούς φορείς .......................................................... 3-189
3.5.3 Η ειδική περίπτωση των άτμητων γραμμικών φορέων ............................. 3-191
3.5.4 Η ειδική περίπτωση των ατενών γραμμικών φορέων ............................... 3-192
3.5.5 Η ειδική περίπτωση των ατενών και άτμητων γραμμικών φορέων ........... 3-193
3.5.6 Ακριβείς, προσεγγιστικές, αναλυτικές και αριθμητικές επιλύσεις ............... 3-193
3.6 Οι εργικές προτάσεις - Εισαγωγική παρουσίαση ................................ 3-195
3.6.1 Εισαγωγή .............................................................................................. 3-195
3.6.2 Έργο και ενέργεια .................................................................................. 3-197
3.6.3 Δυνατά έργα και συμπληρωματικά δυνατά έργα ...................................... 3-203
3.6.4 Η αρχή των δυνατών έργων (ΑΔΕ) ή δυνατών μετακινήσεων .................. 3-210
Α. Διατύπωση της ΑΔΕ ................................................................................ 3-210
Β. Εποπτική ερμηνεία και απόδειξη της ΑΔΕ .................................................. 3-212
Γ. Παράδειγμα υπολογισμού μεγέθους έντασης με την ΑΔΕ ............................ 3-214
3.6.5 Η αρχή των συμπληρωματικών δυνατών έργων (ΑΣΔΕ) ή δυνατών φορτίων 3-218
Α. Διατύπωση της ΑΣΔΕ .............................................................................. 3-218
Β. Εποπτική ερμηνεία και απόδειξη της ΑΣΔΕ ................................................ 3-220
Γ. Παράδειγμα υπολογισμού μεγέθους παραμόρφωσης με την ΑΣΔΕ ............... 3-221 3.6.6 Βασικές συνθήκες της Στατικής - Εργικές προτάσεις - Υπολογισμός στατικών μεγεθών
3-224
4. ΣΥΣΤΑΤΙΚΑ ΣΤΟΙΧΕΙΑ ΚΑΙ ΣΥΝΘΕΣΗ ΓΡΑΜΜΙΚΩΝ ΦΟΡΕΩΝ ........... 4-1
4.1 Τα συστατικά στοιχεία σύνθετων γραμμικών φορέων ........................ 4-3
4.1.1 Δομική κατασκευή, φέρων οργανισμός και στατικό προσομοίωμα .......... 4-3
4.1.2 Γραμμικά δομικά στοιχεία ....................................................................... 4-6
4.1.3 Συνδέσεις (κόμβοι, αρθρώσεις) γραμμικών φορέων ................................ 4-7
4.1.4 Στηρίξεις γραμμικών φορέων .................................................................. 4-10
4.2 Σύνθεση και είδη γραμμικών φορέων ................................................... 4-14
4.2.1 Χωρικοί και επίπεδοι γραμμικοί φορείς ................................................... 4-14
4.2.2 Ταξινόμηση γραμμικών φορέων ............................................................. 4-18
4.2.3 Περιγραφή του υπολογιστικού προσομοιώματος ..................................... 4-21
4.2.4 Η στερεότητα σύνθετων γραμμικών φορέων ........................................... 4-22
xv
Σ T
A Τ
Ι Κ Η
Ι

ΣΤΑΤΙΚΗ ΤΩΝ ΚΑΤΑΣΚΕΥΩΝ -Τόμος Ι: ΘΕΜΕΛΙΩΔΕΙΣ ΑΡΧΕΣ ΚΑΙ ΙΣΟΣΤΑΤΙΚΟΙ ΦΟΡΕΙΣ
5. ΒΑΣΙΚΕΣ ΙΔΙΟΤΗΤΕΣ ΚΑΙ ΜΕΘΟΔΟΙ ΥΠΟΛΟΓΙΣΜΟΥ ΓΡΑΜΜΙΚΩΝ
ΦΟΡΕΩΝ ...................................................................................................... 5-1
5.1 Κινηματικές ιδιότητες (στερεότητα, χαλαρότητα) ................................ 5-3
5.1.1 Το πρόβλημα της στερεής στήριξης ενός δομικού φορέα ……….…........... 5-3
5.1.2 Η στερεή στήριξη (στερεότητα) δίσκων και σωμάτων ................................ 5-3
5.1.3 Η στερεότητα σύνθετων γραμμικών φορέων ............................................ 5-4
5.1.4 Η εσωτερική στερεότητα σύνθετων γραμμικών φορέων ............................ 5-4
5.1.5 Μέθοδοι διαπίστωσης του βαθμού στερεότητας ενός γραμμικού φορέα ... 5-6
5.2 Στατικές ιδιότητες (ισοστατικότητα, υπερστατικότητα) ....................... 5-7
5.2.1 Υπενθύμιση του ορισμού της υπερστατικότητας ........................................ 5-7
5.2.2 Οι δύο πηγές υπερστατικότητας ................................................................ 5-7
5.2.3 Αποσαφήνιση της έννοιας του 'βαθμού στερεότητας' ενός φορέα ............. 5-8
5.2.4 Μέθοδοι προσδιορισμού του βαθμού υπερστατικότητας ........................... 5-10
5.2.5 Τα πλεονεκτήματα των υπερστατικών φορέων …………………………...... 5-10
5.3 Μέθοδοι προσδιορισμού του βαθμού στερεότητας γραμμικών φορέων 5-11
5.3.1 Η σταδιακή οικοδόμηση / αποδόμηση του στατικού φορέα ...................... 5-11
Α. Η σταδιακή οικοδόμηση ........................................................................... 5-11
Β. Η σταδιακή αποδόμηση ........................................................................... 5-16
Γ. Παραδείγματα ......................................................................................... 5-16
5.3.2 Η μέθοδος εναλλαγής ράβδων ............................................................... 5-29
Α. Η βασική ιδέα της μεθόδου ...................................................................... 5-29
Β. Εναλλαγή μιας (δεσμικής) ράβδου ............................................................ 5-31
Γ. Εναλλαγή δύο ή περισσοτέρων (δεσμικών) ράβδων ................................... 5-38
5.3.3 Η κινηματική μέθοδος και το διάγραμμα των πόλων στροφής .................. 5-41
Α. Η χρησιμότητα της κινηματικής μεθόδου .................................................... 5-41
Β. Απειροστές μετακινήσεις - Δυνατές (νοητές) μετακινήσεις ............................ 5-42
Γ. Η κινηματική του μεμονωμένου στερεού δίσκου .......................................... 5-45
Δ. Η κινηματική των χαλαρών φορέων .......................................................... 5-46
Ε. Το διάγραμμα των πόλων στροφής ενός μονοκινηματικού φορέα ................. 5-49
ΣΤ. Η ερμηνεία του διαγράμματος των πόλων στροφής .................................. 5-55
Z. Λογιστικός πίνακας για τον προσδιορισμό των πόλων στροφής ................... 5-58
Η. Η σχεδίαση των δυνατών μετακινήσεων ενός μονοκινηματικού φορέα .......... 5-59
Θ. Η γραμμή βυθίσεων ενός μονοκινηματικού φορέα .......... 5-60
Ι. Παραδείγματα διαγραμμάτων πόλων στροφής και δυνατών μετακινήσεων ..... 5-63
5.3.4 Τα κριτήρια απαρίθμησης ....................................................................... 5-67
Α. Τα κριτήρια απαρίθμησης για δικτυώματα .................................................. 5-67
Β. Τα κριτήρια απαρίθμησης για πλαισιακού τύπου φορείς .............................. 5-70
5.4 Γεωμετρικές ιδιότητες (ισογεωμετρικότητα, υπεργεωμετρικότητα) .. 5-75
5.4.1 Σχετικά με τη διάκριση των φορέων σε ισοστατικούς και υπερστατικούς .. 5-75
xvi
Σ T
A Τ
Ι Κ Η
Ι

ΣΤΑΤΙΚΗ ΤΩΝ ΚΑΤΑΣΚΕΥΩΝ -Τόμος Ι: ΘΕΜΕΛΙΩΔΕΙΣ ΑΡΧΕΣ ΚΑΙ ΙΣΟΣΤΑΤΙΚΟΙ ΦΟΡΕΙΣ
5.4.2 Η έννοια της γεωμετρικής αοριστίας και των βαθμών ελευθερίας ενός φορέα ……………………………………………………………………………. 5-76
5.4.3 Περαιτέρω διευκρίνιση της έννοιας του βαθμού ελευθερίας …………….... 5-78
5.5 Μέθοδοι υπολογισμού στατικά ορισμένων φορέων ……………...…... 5-79
5.5.1 Μέθοδοι υπολογισμού των εντασιακών μεγεθών ..................................... 5-79
5.5.2 Μέθοδοι υπολογισμού των παραμορφωσιακών μεγεθών ........................ 5-79
5.6 Μέθοδοι υπολογισμού στατικά/γεωμετρικά αόριστων φορέων …..... 5-80
5.6.1 Η μέθοδος των υπεραρίθμων δυνάμεων ................................................. 5-80
5.6.2 Η μέθοδος των υπεραρίθμων μετακινήσεων ........................................... 5-81
5.7 Στιβαρότητα και ενδοσιμότητα ………………………………..…………... 5-85
5.7.1 Γενικοί ορισμοί ....................................................................................... 5-85
5.7.2 Τα είδη στιβαρότητας και ενδοσιμότητας σε γραμμικούς φορείς ............... 5-86
6. ΥΠΟΛΟΓΙΣΜΟΣ ΕΝΤΑΣΙΑΚΩΝ ΜΕΓΕΘΩΝ ΙΣΟΣΤΑΤΙΚΩΝ ΦΟΡΕΩΝ .. 6-1
6.1 Οι μέθοδοι υπολογισμού εντασιακών μεγεθών ................................... 6-3
6.2 Υπολογισμός εντασιακών μεγεθών με τη μέθοδο των διαχωριστικών τομών και τις συνθήκες ισορροπίας ........................... 6-4
6.2.1 H μέθοδος των επιλεγμένων διαχωριστικών τομών (Κατάστρωση ισορροπίας σε ολόκληρο τον φορέα ή σε τμήματά του) ....... 6-6
Α. Υπολογισμός των αντιδράσεων στήριξης ενός φορέα που ως ελεύθερο σώμα αποτελεί έναν στερεό δίσκο ..................................................................... 6-6
Β. Υπολογισμός των αντιδράσεων στήριξης και των ενδιάμεσων αντιδράσεων ενός φορέα που ως ελεύθερο σώμα δεν αποτελεί στερεό δίσκο ................... 6-10
Γ. Υπολογισμός των φορτίων διατομής ......................................................... 6-11
Δ. Παράδειγμα ........................................................................................... 6-13
Ε. Σχετικά με την 'έξυπνη' επιλογή των διαχωριστικών τομών .......................... 6-17
6.2.2 Η μέθοδος των κομβικών διαχωριστικών τομών ...................................... 6-20
6.2.3 Αξιολόγηση των μεθόδων και αριθμητικό παράδειγμα ............................ 6-25
Α. Επίλυση με τη μέθοδο των επιλεγμένων διαχωριστικών τομών .................... 6-26
Β. Επίλυση με τη μέθοδο των κομβικών διαχωριστικών τομών ........................ 6-29
6.3 Υπολογισμός εντασιακών μεγεθών με ολοκλήρωση των διαφορικών εξισώσεων ισορροπίας ..................................................... 6-33
6.4 Υπολογισμός εντασιακών μεγεθών με την αρχή των δυνατών έργων ........................................................................................................ 6-34
6.4.1 Η AΔE για απολύτως στερεούς δίσκους .................................................. 6-34
Α. Η έννοια της δυνατής μετακίνησης ............................................................ 6-34
Β. Γενική διατύπωση της ΑΔΕ ...................................................................... 6-35
Γ. Αναλυτική διατύπωση και απόδειξη της ΑΔΕ για τον απολύτως στερεό δίσκο 6-36
6.4.2 Η κινηματική μέθοδος (επιβολή δυνατών μετακινήσεων στον χαλαρό φορέα) .................................................................................................. 6-39
xvii
Σ T
A Τ
Ι Κ Η
Ι

ΣΤΑΤΙΚΗ ΤΩΝ ΚΑΤΑΣΚΕΥΩΝ -Τόμος Ι: ΘΕΜΕΛΙΩΔΕΙΣ ΑΡΧΕΣ ΚΑΙ ΙΣΟΣΤΑΤΙΚΟΙ ΦΟΡΕΙΣ
6.4.3 Παραδείγματα εφαρμογής της κινηματικής μεθόδου ................................ 6-42
6.4.4 Επιβολή δυνατών εσωτερικών παραμορφώσεων στον ισοστατικό φορέα . 6-48
6.5 Τα διαγράμματα των φορτίων διατομής ............................................... 6-51
6.5.1 Υπενθύμιση ορισμών και συμβάσεων .................................................... 6-51
6.5.2 Ιδιότητες των διαγραμμάτων των φορτίων διατομής ................................ 6-52
6.5.3 Υπολογισμός της μέγιστης/ελάχιστης τιμής της ροπής κάμψης ................ 6-58
6.5.4 Η ομόλογη δοκός ................................................................................... 6-61
6.5.5 Παραδείγματα ........................................................................................ 6-61
6.6 Aξιοποίηση της συμμετρίας δομικών φορέων ..................................... 6-63
6.6.1 Υπενθύμιση της μαθηματικής έννοιας της συμμετρίας ............................. 6-63
6.6.2 Ορισμός του συμμετρικού φορέα ............................................................ 6-66
6.6.3 Συμμετρική και αντισυμμετρική φόρτιση .................................................. 6-68
6.6.4 Ιδιότητες φορτίων διατομής συμμετρικών φορέων υπό συμμετρική και υπό αντισυμμετρική φόρτιση ............................................................. 6-71
6.6.5 Παραδείγματα ........................................................................................ 6-76
6.7 Έλεγχοι αποτελεσμάτων ........................................................................ 6-79
6.7.1 Γενικά περί λαθών και ελέγχων .............................................................. 6-79
6.7.2 Λάθη κατά την αριθμητική επίλυση του στατικού φορέα ........................... 6-79
6.7.3 Έλεγχοι των αποτελεσμάτων της αριθμητικής επίλυσης .......................... 6-80
Α. Έλεγχοι ισορροπίας ................................................................................ 6-80
Β. Έλεγχοι συμβιβαστού .............................................................................. 6-80
7. ΧΑΡΑΚΤΗΡΙΣΤΙΚΟΙ ΤΥΠΟΙ ΙΣΟΣΤΑΤΙΚΩΝ ΦΟΡΕΩΝ …………………... 7-1
7.1 Αμφιέρειστες δοκοί ................................................................................. 7-4
7.2 Πρόβολοι .................................................................................................. 7-15
7.3 Μονο- και αμφιπροέχουσες δοκοί ........................................................ 7-22
7.4 Αρθρωτές δοκοί (δοκοί Gerber) ............................................................ 7-25
7.4.1 Εισαγωγή ............................................................................................. 7-25
7.4.2 Μόρφωση αρθρωτών δοκών .................................................................. 7-26
7.4.3 Μέθοδοι υπολογισμού αρθρωτών δοκών ................................................. 7-30
Α. Η μέθοδος των πρόσθετων συνθηκών ισορροπίας .......................................... 7-31
Β. Η μέθοδος των αντιδράσεων στήριξης στις αρθρώσεις .................................... 7-35
Γ. Η μέθοδος της προσαρμοζόμενης κλείουσας ................................................... 7-38
7.4.4 "Γενικευμένες" δοκοί Gerber .................................................................... 7-41
7.5 Πλαισιακοί και τοξωτοί φορείς ................................................................. 7-45
7.5.1 Αμφιέρειστα πλαίσια και τόξα ................................................................. 7-45
Α. Πλαίσια ............................................................................................................ 7-45
Β. Τόξα ................................................................................................................ 7-47
xviii
Σ T
A Τ
Ι Κ Η
Ι

ΣΤΑΤΙΚΗ ΤΩΝ ΚΑΤΑΣΚΕΥΩΝ -Τόμος Ι: ΘΕΜΕΛΙΩΔΕΙΣ ΑΡΧΕΣ ΚΑΙ ΙΣΟΣΤΑΤΙΚΟΙ ΦΟΡΕΙΣ
7.5.2 Τριαρθρωτά πλαίσια και τόξα ................................................................. 7-50
7.5.3 Τριαρθρωτά πλαίσια και τόξα με ελκυστήρα ............................................ 7-57
7.5.4 Τριαρθρωτά τόξα με επίσαξη δοκών ή με ανάρτηση δοκών/ελκυστήρων .. 7-60
7.5.5 Τόξα με γεωμετρία γραμμής στήριξης ……………………………………… 7-62
7.5.6 Χωροπλαίσια .......................................................................................... 7-66
7.5.7 Εσχάρες δοκών ...................................................................................... 7-71
7.6 Ενισχυμένες δοκοί .....................................................................................7-75
7.6.1 H μόρφωση του στατικού φορέα ............................................................. 7-75
7.6.2 Ο υπολογισμός ενισχυμένων δοκών με ενδιάμεση άρθρωση .................... 7-81
7.6.3 Αριθμητικά παραδείγματα ........................................................................ 7-83
7.7 Δικτυώματα ................................................................................................ 7-89
7.7.1 Ορισμός, φέρουσα συμπεριφορά και προσομοίωση δικτυωμάτων …....... 7-89
7.7.2 Η μόρφωση των επίπεδων δικτυωμάτων ................................................. 7-103
Α. Κανόνες μόρφωσης απλών και σύνθετων επίπεδων δικτυωμάτων ................ 7-103
Β. Η κινηματική ευστάθεια (στερεότητα) των επίπεδων δικτυωμάτων .................7-109
Γ. Τυπικές μορφές δικτυωμάτων της δομικής πράξης ..................................... 7-109
7.7.3 Η μόρφωση των χωρικών δικτυωμάτων ................................................... 7-115
Α. Κανόνες μόρφωσης απλών και σύνθετων χωρικών δικτυωμάτων ................ 7-115
Β. Η κινηματική ευστάθεια (στερεότητα) των χωροδικτυωμάτων ....................... 7-120
Γ. Αναγωγή χωροδικτυωμάτων σε επίπεδα δικτυώματα .................................. 7-120
Δ Διάφορα χωροδικτυώματα της δομικής πράξης ......................................... 7-122
7.7.4 Mέθοδοι υπολογισμού δικτυωμάτων ........................................................ 7-127
Α. Επίπεδα δικτυώματα ............................................................................... 7-128 Α1. Η μέθοδος Ritter (Μέθοδος των επιλεγμένων διαχωριστικών τομών) ............ 7-128 Α2. Η μέθοδος των κομβικών διαχωριστικών τομών ........................................ 7-134
Β. Χωροδικτυώματα ..................................................................................... 7-140 Β1. Η μέθοδος Ritter (Μέθοδος των επιλεγμένων διαχωριστικών τομών) ............ 7-143 Β2. Η μέθοδος των κομβικών διαχωριστικών τομών ....................................... 7-149
Γ. Σύνοψη τρόπων υπολογισμού δικτυωμάτων ............................................... 7-154
8. ΕΡΓΙΚΕΣ ΚΑΙ ΕΝΕΡΓΕΙΑΚΕΣ ΑΡΧΕΣ ΚΑΙ ΠΡΟΤΑΣΕΙΣ ......................... 8-1
8.1 Γενικευμένη διατύπωση του έργου παραμόρφωσης γραμμικών φορέων....................................................................................................... 8-3
Α. Το έργο παραμόρφωσης μοναχικών και συνεχών φορτίων ............................ 8-3 Β. Το έργο παραμόρφωσης σε ένα επίπεδο γραμμικό στοιχείο .......................... 8-5 Γ. Το έργο παραμόρφωσης σε ένα χωρικό γραμμικό στοιχείο ........................... 8-11 Δ. Το έργο παραμόρφωσης σε έναν γραμμικό φορέα ....................................... 8-12
8.2 Ίδιο έργο παραμόρφωσης ελαστικών γραμμικών φορέων ................ 8-13
8.3 Παθητικό έργο παραμόρφωσης γραμμικών φορέων .......................... 8-19
xix
Σ T
A Τ
Ι Κ Η
Ι

ΣΤΑΤΙΚΗ ΤΩΝ ΚΑΤΑΣΚΕΥΩΝ -Τόμος Ι: ΘΕΜΕΛΙΩΔΕΙΣ ΑΡΧΕΣ ΚΑΙ ΙΣΟΣΤΑΤΙΚΟΙ ΦΟΡΕΙΣ
8.4 Η αρχές των δυνατών έργων και των συμπληρωματικών δυνατών έργων ....................................................................................... 8-22
8.4.1 Η αρχή των δυνατών έργων (ΑΔΕ) ......................................................... 8-22 8.4.2 Η αρχή των συμπληρωματικών δυνατών έργων (ΑΣΔΕ) ......................... 8-32
8.5 Η γενική εργική ή ενεργειακή πρόταση της Ελαστοστατικής ……….. 8-38 Α. Η γενική εργική πρόταση για τα ίδια έργα παραμόρφωσης …………………… 8-38 Β. Η γενική εργική πρόταση για τα παθητικά έργα παραμόρφωσης ……………….. 8-39
8.6. To θεώρημα του Betti και οι τρεις προτάσεις αμοιβαιότητας …….. 8-40 Α. Το θεώρημα του Betti …………………………………………………………… 8-41 Β. Η πρόταση Maxwell-Mohr (1η πρόταση αμοιβαιότητας) ………………….……... 8-44 Γ. Η αντίστροφη πρόταση Maxwell-Mohr (2η πρόταση αμοιβαιότητας) ……….…… 8-47 Δ. Η πρόταση Krohn-Land (3η πρόταση αμοιβαιότητας) ……………………….… 8-52
8.7 Οι έννοιες του δυναμικού και του συμπληρωματικού δυναμικού …... 8-57 Α. Έργο και ενέργεια ………………………………………………………………….…. 8-57 Β. Το εσωτερικό δυναμικό (ενέργεια παραμόρφωσης) ……………………………….... 8-57 Γ. Το εξωτερικό δυναμικό (δυναμικό των εξωτερικών φορτίων) ……….....…………... 8-58 Δ. Το ολικό δυναμικό ενός φορέα …………………………………………...……………. 8-59 Ε. Το συμπληρωματικό ολικό δυναμικό ενός φορέα …….………………..………….… 8-59
8.8 Οι αρχές της στάσιμης και της ελάχιστης τιμής του δυναμικού ….…. 8-63 Α. Επαναδιατύπωση της ΑΔΕ ………………….………………………………… 8-63 Β. Η αρχή της στάσιμης τιμής του δυναμικού ………………………………………. 8-65 Γ. Η αρχή της ελάχιστης τιμής του δυναμικού ……………………………………. 8-66
8.9 Το 1ο θεώρημα του Castigliano .............................................................. 8-70
8.10 Οι αρχές της στάσιμης και της ελάχιστης τιμής του συμπληρωματικού δυναμικού .............................................................. 8-73 Α. Επαναδιατύπωση της ΑΣΔΕ .......................................................................... 8-73 Β. Η αρχή της στάσιμης τιμής του συμπληρωματικού δυναμικού ........................... 8-75 Γ. Η αρχή της ελάχιστης τιμής του συμπληρωματικού δυναμικού ........................... 8-76
8.11 Το 1ο θεώρημα του Engesser και το 2ο θεώρημα του Castigliano . 8-78
8.12 To 2ο θεώρημα του Engesser και η πρόταση του Menabrea ............ 8-81
8.13 Σύνοψη εργικών/ενεργειακών αρχών και προτάσεων ……………... 8-82
9. ΥΠΟΛΟΓΙΣΜΟΣ ΠΑΡΑΜΟΡΦΩΣΙΑΚΩΝ ΜΕΓΕΘΩΝ ΙΣΟΣΤΑΤΙΚΩΝ ΦΟΡΕΩΝ ............................................................................ 9-1
9.1 Μέθοδοι υπολογισμού παραμορφωσιακών μεγεθών ......................... 9-3
9.2 Υπολογισμός μετακινήσεων με ολοκλήρωση των διαφορικών εξισώσεων ................................................................................................ 9-6
9.3 Υπολογισμός μετακινήσεων με τη βοήθεια ενεργειακών μεθόδων ... 9-6
xx
Σ T
A Τ
Ι Κ Η
Ι

ΣΤΑΤΙΚΗ ΤΩΝ ΚΑΤΑΣΚΕΥΩΝ -Τόμος Ι: ΘΕΜΕΛΙΩΔΕΙΣ ΑΡΧΕΣ ΚΑΙ ΙΣΟΣΤΑΤΙΚΟΙ ΦΟΡΕΙΣ
9.4 Υπολογισμός μετακινήσεων με την ΑΣΔΕ ............................................ 9-8 9.4.1 Εξειδικευμένη διατύπωση της ΑΣΔΕ για τον υπολογισμό μοναχικών μετακινήσεων ......................................................................................... 9-8 9.4.2 Ο συνυπολογισμός των εσωτερικών και εξωτερικών καταναγκασμών ...... 9-11 9.4.3 Ο συνυπολογισμός ελαστικών στηρίξεων/πακτώσεων …………………… 9-15 9.4.4 Σύντομη επανάληψη και αναλυτική διατύπωση της ΑΣΔΕ για τον υπολογισμό μοναχικών μετακινήσεων γραμμικών ελαστικών φορέων ….. 9-16 Α. Επίπεδοι φορείς ..................................................................................... 9-17 Β. Χωρικοί φορείς ....................................................................................... 9-19 Γ. Εξειδικευμένες μορφές της ΑΣΔΕ .............................................................. 9-21 Δ. Παρατηρήσεις ........................................................................................ 9-22 9.4.5 Βασικές περιπτώσεις υπολογισμού μετακινήσεων ................................... 9-23 9.4.6 Ο υπολογισμός των ολοκληρωμάτων του εσωτερικού συμπληρωματικού δυνατού έργου ....................................................................................... 9-26 9.4.7 Φορείς με μεταβλητή διατομή ................................................................. 9-28 9.4.8 Αριθμητικά παραδείγματα ....................................................................... 9-30 Α. Παράδειγμα 1: Πρόβολος με συνεχές φορτίο - Η επιρροή της διάτμησης …. 9-31 B. Παράδειγμα 2: Τριαρθρωτό πλαίσιο - Η επιρροή της διάτασης ……………. 9-35 Γ. Παράδειγμα 3: Ελαστικές στηρίξεις και καταναγκασμοί ……………………. 9-38 Δ. Παράδειγμα 4: Επίπεδο δικτύωμα …………………………………………. 9-41 Ε. Παράδειγμα 5: Κυκλικό αμφιέρειστο τόξο - Αναλυτική ολοκλήρωση …….. 9-43 ΣΤ. Παράδειγμα 6: Πρόβολος μεταβλητής διατομής - Αριθμητική ολοκλήρωση .. 9-44
9. 5 Υπολογισμός ελαστικών γραμμών ………………………………………. 9-47 9.5.1 Ορισμός της ελαστικής γραμμής και η σκοπιμότητα υπολογισμού της ...... 9-47 9.5.2 Οι μέθοδοι υπολογισμού ελαστικών γραμμών ………………………….. 9-49 9.5.3 Υπενθύμιση και σύνοψη των διαφορικών εξισώσεων …………………….. 9-50 Α. Οι διαφορικές εξισώσεις της άτμητης δοκού υπό εγκάρσια φόρτιση ………… 9-50 Β. Συμπερίληψη των μη ελαστικών παραμορφώσεων …………………………. 9-51 Γ. Η επιρροή των διατμητικών παραμορφώσεων ………………………………. 9-53 9.5.4 Αναλυτική ολοκλήρωση των διαφορικών εξισώσεων ............................... 9-54 Α. Παράδειγμα 1: Άτμητος πρόβολος υπό τριγωνικό φορτίο …………………… 9-55 Β. Παράδειγμα 2: Ελαστική γραμμή προβόλου λόγω διατμητικών παραμορφώσεων ……………………………………………. 9-57 Γ. Παράδειγμα 3: Υπερστατική (αμφίπακτη) δοκός υπό ομοιόμορφο φορτίο και ανομοιόμορφη θερμοκρασιακή φόρτιση Δt ………………. 9-58 Δ. Παράδειγμα 4: Πρόβολος υπό ανομοιόμορφη θερμοκρασιακή φόρτιση Δt … 9-61 9.5.5 Υπολογισμός με τη μέθοδο των συναρτήσεων ω και την ΑΣΔΕ ................ 9-62 A. Πινακοποίηση της ελαστικής γραμμής ενός ευθύγραμμου τμήματος με ομογενείς συνοριακές συνθήκες (αμφιέρειστη δοκός) ………………………. 9-62 Β. Παράδειγμα υπολογισμού των πινακοποιημένων τιμών ……………………. 9-63 Γ. Εφαρμογή των συναρτήσεων ω για σύνθετες φορτίσεις ……………………. 9-63 Δ. Εφαρμογή σε περιπτώσεις μη ομογενών συνοριακών συνθηκών ………….. 9-65
xxi
Σ T
A Τ
Ι Κ Η
Ι

ΣΤΑΤΙΚΗ ΤΩΝ ΚΑΤΑΣΚΕΥΩΝ -Τόμος Ι: ΘΕΜΕΛΙΩΔΕΙΣ ΑΡΧΕΣ ΚΑΙ ΙΣΟΣΤΑΤΙΚΟΙ ΦΟΡΕΙΣ
Ε. Σύνοψη της μεθόδου ………………………………………………………... 9-68 ΣΤ. Αριθμητικό παράδειγμα ……………………………………...……………. 9-69 9.5.6 Yπολογισμός με την αναλογία του Mohr ................................................. 9-72 A. Η αναλογία μορφής των διαφορικών εξισώσεων ισορροπίας και συμβιβαστού ……………………………………………………………….. 9-72 Β. Ο καθορισμός του ομόλογου φορέα ……………………………………….. 9-73 Γ. Αριθμητικά παραδείγματα …………………………..………………………... 9-76
9.6 Αξιοποίηση της συμμετρίας δομικών φορέων …………………………. 9-80
10. ΓΡΑΜΜΕΣ ΕΠΙΡΡΟΗΣ ΕΝΤΑΣΙΑΚΩΝ ΜΕΓΕΘΩΝ ................................ 10-1
10.1 Κινητά φορτία και η επιρροή τους στα στατικά μεγέθη ενός φορέα 10-3
10.2 Η έννοια της γραμμής επιρροής .......................................................... 10-4 Α. Εισαγωγική θεώρηση .............................................................................. 10-4 Β. Γενικευμένη θεώρηση ..................................................................................... 10-6 Γ. Διευκρινιστικές παρατηρήσεις ................................................................... 10-8
10.3 Υπολογισμός ΓΕ μεγεθών έντασης με τις συνθήκες ισορροπίας …. 10-12 10.3.1 Διαδικασία υπολογισμού και γενικές παρατηρήσεις ............................... 10-12 10.3.2 Παραδείγματα ΓΕ για κινητά κατακόρυφα φορτία Pz .............................. 10-12 10.3.3 Παραδείγματα ΓΕ για κινητές ροπές ML ………………………………..… 10-14
10.4 Υπολογισμός ΓΕ μεγεθών έντασης με την κινηματική μέθοδο (πρόταση Κrohn-Land) ……………………………………………………. 10-16
10. 4.1 Διατύπωση του βασικού σκεπτικού και γενικές παρατηρήσεις ............... 10-16 10.4.2 Τα βήματα υπολογισμού ΓΕ με την κινηματική μέθοδο .......................... 10-19 10.4.3 Πρακτικός τρόπος προσδιορισμού ΓΕ εντασιακών μεγεθών με την πρόταση Krohn-Land ……………………………………………………… 10-23 10.4.4 Σύνοψη χαρακτηριστικών ιδιοτήτων ΓΕ εντασιακών μεγεθών ................ 10-25
10.5 ΓΕ για έμμεση δράση των κινητών φορτίων ...................................... 10-26
10.6 Παραδείγματα ........................................................................................ 10-29 10.6.1 Δοκός Gerber ....................................................................................... 10-29 10.6.2 Τριαρθρωτός φορέας με κεκλιμένο φορτιζόμενο πέλμα ......................... 10-29 10.6.3 Δικτύωμα με φορτιζόμενο πέλμα άνω ή κάτω ........................................ 10-34
10.7 Αποτίμηση ΓΕ ........................................................................................ 10-37 Α. Αποτίμηση για μοναχικά φορτία Ρ και ΜL ................................................... 10-37 Β. Αποτίμηση για συνεχή φορτία p και mL ...................................................... 10-37 Γ. Αριθμητικό παράδειγμα αποτίμησης ΓΕ για μία σταθερή φόρτιση ................. 10-38 Δ. Δυσμενείς φορτίσεις ................................................................................ 10-39
10.8 Περιβάλλουσες εντασιακών μεγεθών λόγω κινητών φορτίων .......... 10-44 Α. Περιβάλλουσα ροπών και τεμνουσών αμφιέρειστης δοκού για συγκεντρωμένο κινητό φορτίο Ρ ....................................................................................... 10-44
xxii
Σ T
A Τ
Ι Κ Η
Ι

ΣΤΑΤΙΚΗ ΤΩΝ ΚΑΤΑΣΚΕΥΩΝ -Τόμος Ι: ΘΕΜΕΛΙΩΔΕΙΣ ΑΡΧΕΣ ΚΑΙ ΙΣΟΣΤΑΤΙΚΟΙ ΦΟΡΕΙΣ
Β. Περιβάλλουσα ροπών και τεμνουσών αμφιέρειστης δοκού για συνεχές κινητό φορτίο q .................................................................................................. 10-46 Γ. Περιβάλλουσα ροπών αμφιέρειστης δοκού για δύο συγκεντρωμένα κινητά φορτία σε σταθερή απόσταση μεταξύ τους .................................................. 10-46
11. ΓΡΑΜΜΕΣ ΕΠΙΡΡΟΗΣ ΠΑΡΑΜΟΡΦΩΣΙΑΚΩΝ ΜΕΓΕΘΩΝ ................. 11-1
11.1 Ορισμοί και υπενθυμίσεις ..................................................................... 11-3
11.2 Υπολογισμός μεμονωμένων τεταγμένων της ΓΕ με την ΑΣΔΕ ........ 11-4
11.3 Υπολογισμός ΓΕ με την πρόταση Maxwell-Mohr .............................. 11-4 11.3.1 Διατύπωση του βασικού σκεπτικού ....................................................... 11-4 11.3.2 Τα βήματα υπολογισμού ΓΕ με την πρόταση Maxwell-Mohr ................... 11-5 11.3.3 Πρακτικός τρόπος προσδιορισμού ΓΕ παραμορφωσιακών μεγεθών με την πρόταση Maxwell-Mohr .................................................................. 11-8
11.4 Παραδείγματα ……………………………………………………………..... 11-9
11.5 Αποτίμηση γραμμών επιρροής παραμορφωσιακών μεγεθών ......... 11-9
ΠΑΡΑΡΤΗΜΑ ……………………………………………………………………. Π-1
ΒΟΗΘΗΤΙΚΟΙ ΠΙΝΑΚΕΣ ………………………………………………………... Π-3
Πίνακας 0 Ολοκληρώματα γινομένου δύο συναρτήσεων ……….…………...... Π-5
Πίνακας 1 Γεωμετρικά στοιχεία συνήθων διατομών …………………….…...… Π-6
A. Κεντροβαρικός άξονας, εμβαδόν και ροπή αδράνειας σε κάμψη …... Π-6
B. Τεκμαρτή επιφάνεια διατμησης …………………..…………………. Π-7
Γ. Ροπή αδράνειας σε στρέψη ……………...…...……………………. Π-8
Πίνακας 2 Ιδιότητες δοικών υλικών …………………………………….….…….. Π-9
Πίνακας 3α Βασικές σχέσεις για τη μέθοδο των συναρτήσεων ω ………………. Π-10
Πίνακας 3β Τιμές συναρτήσεων ω …………………………………………...….. Π-11
ΒΙΒΛΙΟΓΡΑΦΙΑ ……………………………………………………………….….. Π-13
ΕΥΡΕΤΗΡΙΟ ΟΝΟΜΑΤΩΝ …………………………………………………… Π-15
ΕΥΡΕΤΗΡΙΟ ΟΡΩΝ ………..…………………………………………………….. Π-17
xxiii
Σ T
A Τ
Ι Κ Η
Ι

ΣΤΑΤΙΚΗ ΤΩΝ ΚΑΤΑΣΚΕΥΩΝ -Τόμος Ι: ΘΕΜΕΛΙΩΔΕΙΣ ΑΡΧΕΣ ΚΑΙ ΙΣΟΣΤΑΤΙΚΟΙ ΦΟΡΕΙΣ
xxiv
Σ T
A Τ
Ι Κ Η
Ι

2
ΟΙ ΚΑΤΑΣΚΕΥΕΣ ΚΑΙ ΤΑ ΠΡΟΣΟΜΟΙΩΜΑΤΑ ΤΟΥΣ
Σ T
A Τ
Ι Κ Η
Ι

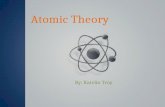
Φωτογραφία:
Ηearst tower (New York, 2006, μεταλλικός φέρων οργανισμός, 182m)
Σ T
A Τ
Ι Κ Η
Ι

ΣΤΑΤΙΚΗ ΤΩΝ ΚΑΤΑΣΚΕΥΩΝ – Τόμος Ι – Θεμελιώδεις αρχές και ισοστατικοί φορείς
2. ΟΙ ΚΑΤΑΣΚΕΥΕΣ ΚΑΙ ΤΑ ΠΡΟΣΟΜΟΙΩΜΑΤΑ ΤΟΥΣ
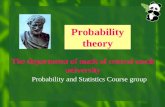
2.1 Το δομικό σύστημα και το υπολογιστικό του προσομοίωμα 2.1.1 Ορισμός του δομικού συστήματος Οι δομικές κατασκευές είναι σύνθετα μηχανικά συστήματα αποτελούμενα από διαφόρων τύπων φέροντα δομικά στοιχεία συζευγμένα μεταξύ τους μέσω συνδέσμων, καθώς και από άλλα στοιχεία και τμήματα που δεν συμμετέχουν στον φέροντα οργανισμό (δομικό φορέα). Προορισμός του φέροντα οργανισμού είναι να παραλάβει όλες τις επιρροές (δράσεις) που δέχεται η κατασκευή λόγω της χρήσης της και λόγω του περιβάλλοντος στο οποίο είναι εκτεθειμένη (π.χ ωφέλιμα φορτία, θερμοκρασιακούς καταναγκασμούς, σεισμικές διεγέρσεις κ.ά.) και να τις μεταβιβάσει με ασφάλεια στο στερεό έδαφος θεμελίωσης, με το οποίο συνδέεται μέσω στηρίξεων (εφεδράνων και θεμελίων διαφόρων μορφών). Είναι προφανές ότι το υπό μελέτη συνολικό δομικό σύστημα συμπεριλαμβάνει, εκτός από την ίδια την κατασκευή, το έδαφος θεμελίωσης και τις φορτίσεις (Σχ. 2.1.1-1).
Δομικό σύστημα
Δομική κατασκευή(οικοδόμημα, δόμημαή απλώς κατασκευή)
Έδαφοςθεμελίωσης
Επιρροές (δράσεις)επί της κατασκευήςλόγω λειτουργίας και
Προσο
μοίωμα
περιβάλλοντος
Φέρων οργανισμόςτης κατασκευής
(Δομικός φορέας)
Φορτία καικαταναγκασμοί
που ασκούνται στονφέροντα οργανισμό
φέροντα οργανισμούΠροσομοίωμα
συμπεριλαμβανομένηςτης θεμελίωσης
(Στατικό σύστημα,στατικός φορέας)
Προσομοίωμαεδάφους θεμελίωσης
Προσομοίωμαφόρτισης
Διάκριση φερόντων τμημάτωναπό μη φέροντα
Προσομοίωσηφέρουσας
συμπεριφοράς
Προσομοίωσηφορτίων και
καταναγκασμών
Επιρροήμη φερόντων στοιχείων
της κατασκευής
δομικού συστήματος
Σχ. 2.1.1-1 Τα συστατικά του δομικού συστήματος και η προσομοίωσή του
2-3
Σ T
A Τ
Ι Κ Η
Ι

Κεφάλαιο 2. Οι κατασκευές και τα προσομοιώματά τους
2.1.2 Μηχανικό και υπολογιστικό προσομοίωμα Η πολυπλοκότητα της πραγματικής μηχανικής συμπεριφοράς των δομικών συστημάτων μας αναγκάζει να χρησιμοποιούμε λιγότερο ή περισσότερο απλοποιημένα μηχανικά προσομοιώματα προκειμένου να καταστεί δυνατός ο υπολογισμός των εντάσεων και των παραμορφώσεών τους. Με τον όρο 'μηχανικό προσομοίωμα' χαρακτηρίζουμε ένα μοντέλο της κατασκευής, το οποίο προκύπτει μέσα από μια ολόκληρη σειρά εξιδανικεύσεων της πραγματικής κατασκευής, οι οποίες ισοδυναμούν με μικρότερες ή μεγαλύτερες απλοποιήσεις
(α) των γεωμετρικών χαρακτηριστικών της κατασκευής (ανωδομής και θεμελίωσης) και των μηχανικών ιδιοτήτων των δομικών υλικών από τα οποία κατασκευάζεται ο φέρων οργανισμός της ( προσομοίωμα φέροντα οργανισμού ή στατικό σύστημα ή στατικός φορέας),
(β) των ιδιοτήτων του εδάφους πάνω στο οποίο θεμελιώνεται η κατασκευή ( Προσομοίωμα του εδάφους θεμελίωσης) και
(γ) των χαρακτηριστικών των διαφόρων φορτίσεων στις οποίες αναμένεται να υποβληθεί η κατασκευή ( Προσομοίωμα της φόρτισης).
Το μηχανικό αυτό προσομοίωμα του όλου δομικού συστήματος (Σχ. 2.1.1-1[δεξιά]) επιλύεται στη συνέχεια είτε με ακριβείς είτε με προσεγγιστικές υπολογιστικές μεθόδους. Στη δεύτερη περίπτωση υπεισέρχεται επομένως και μία ακόμη σειρά απλουστεύσεων και παραδοχών που αφορούν στις ίδιες τις μεθόδους υπολογισμού, οπότε μπορεί να μιλήσει κανείς για το υπολογιστικό προσομοίωμα της κατασκευής προς διάκριση από το μηχανικό. Έτσι, ως μηχανικό προσομοίωμα μιας ορθογωνικής πλάκας επί δοκών μπορεί π.χ. να θεωρηθεί η πλάκα επί ακλόνητων αρθρωτών στηρίξεων, δηλαδή να θεωρηθεί αμελητέα η παραμορφωσιμότητα των δοκών επί των οποίων εδράζεται η πλάκα. Η επίλυση μιας τέτοιας απλά εδραζόμενης πλάκας μπορεί να γίνει π.χ. με τη μέθοδο των λωρίδων κατά Marcus ή, αν απαιτείται μεγαλύτερη ακρίβεια, με τη μέθοδο των πεπερασμένων στοιχείων. Το υπολογιστικό προσομοίωμα είναι επομένως διαφορετικό για τις δύο αυτές περιπτώσεις. Πολύ συχνά δεν γίνεται διάκριση των δύο εννοιών και με τον όρο 'προσομοίωμα' εννοούνται κατά συγχώνευση και τα δύο μαζί (Σχ. 2.1.2-1[άνω]).
2.1.3 Η αρχή της αρμονικής ακρίβειας Είναι πρόδηλο ότι μόνο μέσα από μία ώριμη επιλογή προσομοιωμάτων θα προκύψουν ρεαλιστικά αποτελέσματα, δηλαδή αποτελέσματα που θα αποδίδουν με επαρκή για την εκάστοτε περίπτωση ακρίβεια τη μηχανική συμπεριφορά της πραγματικής κατασκευής. Για τον λόγο αυτόν δίνεται σε όλη την έκταση του παρόντος συγγράμματος ιδιαίτερη σημασία στην επισήμανση των παραδοχών και απλοποιήσεων που εμπεριέχονται στις παρουσιαζόμενες μεθόδους υπολογισμού των μεγεθών έντασης και παραμόρφωσης στατικών φορέων. Είναι επίσης αυτονόητο ότι κανένα προσομοίωμα δεν αποδίδει πλήρως την πραγματικότητα και
2-4
Σ T
A Τ
Ι Κ Η
Ι

ΣΤΑΤΙΚΗ ΤΩΝ ΚΑΤΑΣΚΕΥΩΝ – Τόμος Ι – Θεμελιώδεις αρχές και ισοστατικοί φορείς
ότι ως εκ τούτου οποιοδήποτε προσομοίωμα είναι πάντοτε επιδεκτικό βελτιώσεων (Σχ. 2.1.2-1). Εντούτοις, προσομοίωση και υπολογισμός θα πρέπει να διέπονται από την "αρχή της αρμονικής ακρίβειας", η οποία επιβάλλει την προσαρμογή των δυνατοτήτων του μοντέλου στις απαιτήσεις του εκάστοτε προς επίλυση προβλήματος: Δεν έχει νόημα, π.χ., να κάνουμε χονδροειδείς απλοποιήσεις σχετικά με το μηχανικό προσομοίωμα και στη συνέχεια να το επιλύουμε με τις πλέον ακριβείς μεθόδους υπολογισμού ("αναρμονική ακρίβεια"!).
Προσομοίωμα(μοντέλο)
Πραγματικήκατασκευή
Αποτελέσματα
[μηχανικό /υπολογιστικό]
επίλυσηςτου μοντέλου
ΠΡΟΣΟΜΟΙΩΣΗ
μοντέλου
ΕΠΙΛΥΣΗ
Βελτίωση
ΑΞΙΟΛΟΓΗΣΗ
Σύγκριση μεπραγματικότητα καιαξιολόγηση της
αποτελεσματικότηταςτου μοντέλου
Μη ικανοποιητική
Κατανόηση και "υπολογιστική σύλληψη" τηςμηχανικής συμπεριφοράς της πραγματικής
κατασκευήςβάσει των αποτελεσμάτων της
τηςπερισσοτέρων μοντέλωνεπίλυσης ενός ή
Iκανοποιητική
Σχ. 2.1.2-1 Ο κύκλος της ανάλυσης: Προσομοίωση-Επίλυση-Αξιολόγηση
Για το τρίπτυχο "προσομοίωση-επίλυση-αξιολόγηση" χρησιμοποιείται και ο όρος "ανάλυση" της κατασκευής. Περισσότερες διευκρινήσεις σχετικά με τον καθορισμό και την επακόλουθη επίλυση του μηχανικού/υπολογιστικού μοντέλου μιας κατασκευής θα δοθούν στην παράγραφο 1.3 του τόμου ΙΙ.
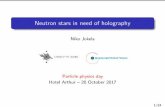
2.1.4 Απλοποιημένο παράδειγμα μηχανικού προσομοιώματος Στο παρακάτω σχήμα 2.1.4-1 παρουσιάζεται σε αδρές γραμμές ένα απλοποιημένο παράδειγμα προσομοίωσης μιας δικτυωτής γέφυρας. Στο παράδειγμα αυτό ο δομικός φορέας της γέφυρας απλοποιείται με τρόπο που επιτρέπει τον ανεξάρτητο και διαδοχικό υπολογισμό περισσοτέρων επί μέρους στατικών φορέων: (α) Πρώτα υπολογίζεται η ένταση και παραμόρφωση των διαμήκων δοκών λόγω
των διαφόρων φορτίων που δέχονται (π.χ. από τα διερχόμενα οχήματα). Ο υπολογισμός γίνεται θεωρώντας ότι οι διαμήκεις δοκοί στηρίζονται ακλόνητα επί των εγκάρσιων δοκών.
2-5
Σ T
A Τ
Ι Κ Η
Ι

Κεφάλαιο 2. Οι κατασκευές και τα προσομοιώματά τους
(β) Κατόπιν υπολογίζεται η ένταση και παραμόρφωση των εγκάρσιων δοκών. Ως φορτία τους λαμβάνονται οι προηγουμένως υπολογισθείσες αντιδράσεις στήριξης των διαμήκων δοκών. Ο υπολογισμός γίνεται θεωρώντας ότι οι εγκάρσιες δοκοί στηρίζονται ακλόνητα επί των κύριων δικτυωτών δοκών της γέφυρας.
(γ) Τέλος υπολογίζεται η ένταση και παραμόρφωση των κύριων δικτυωτών δοκών. Ως φορτία τους λαμβάνονται οι προηγουμένως υπολογισθείσες αντιδράσεις στήριξης των εγκάρσιων δοκών. Ο υπολογισμός γίνεται θεωρώντας ότι οι κύριες δικτυωτές δοκοί στηρίζονται ακλόνητα μέσω κατάλληλων θεμελίων επί του εδάφους θεμελίωσης.
Πραγματικές γέφυρες - Πραγματικός δομικός φορέας
Απλοποιημένη σχηματική παράσταση
Θεμέλιο(βάθρο)
Κύριαδικτυωτή δοκός
Διαμήκης δοκός
Εγκάρσια δοκός
Σ χ. 2.1.4-1 Απλοποιημένο παράδειγμα προσομοίωσης μιας δικτυωτής γέφυρας
2-6
Σ T
A Τ
Ι Κ Η
Ι

ΣΤΑΤΙΚΗ ΤΩΝ ΚΑΤΑΣΚΕΥΩΝ – Τόμος Ι – Θεμελιώδεις αρχές και ισοστατικοί φορείς
Τα εξωτερικά φορτία(π.χ. λόγω διέλευσηςοχημάτων ή συρμού),ενεργούν επί τωνδιαμήκων δοκών,οι οποίες στηρίζονταιστις εγκάρσιες δοκούς.
Διαμήκης δοκόςπ.χ. φορτία οχημάτων
Α
Β
Γ
Δ
δικτυωτή δοκός
δικτυωτών δοκών μπορεί να γίνει:Η επίλυση των κυρίων
Εγκάρσια δοκός
δικτυωτές δοκούς της γέφυρας.και τις μεταφέρουν στις κύριεςστήριξης των διαμήκων δοκώνφορτίζονται με τις αντιδράσειςΟι εγκάρσιες δοκοί
με τις αντιδράσεις των εγκάρσιωνδοκών και τις μεταφέρουν μέσωτων ακλόνητων θεμελίων τους
Οι κύριες δικτυωτές δοκοίφορτίζονται στους κόμβους τους
Α,Β,Γ,Δ στο στερεό έδαφος.
(ή ημιάκαμπτων) κόμβωνμε θεώρηση άκαμπτων
(κλασσικό δικτύωμα)αρθρώσεων στους κόμβους
με θεώρηση πλήρων
(περισσότερα στην παράγραφο 7.7.1)
Διαδοχικός υπολογισμός
Κύρια
ανεξαρτήτων προσομοιωμάτων:
Σχ. 2.1.4-1 (συνέχ.) Απλοποιημένο παράδειγμα προσομοίωσης μιας δικτυωτής γέφυρας
2-7
Σ T
A Τ
Ι Κ Η
Ι

Κεφάλαιο 2. Οι κατασκευές και τα προσομοιώματά τους
Περισσότερες διευκρινήσεις σχετικά με την προσομοίωση δικτυωτών φορέων θα δοθούν στο κεφάλαιο 7, παράγρ. 7.7.1.
2.1.5 Προσομοιώσεις υλικών σωμάτων Μία σειρά εξιδανικεύσεων αφορά στα ίδια τα υλικά σώματα και στη μηχανική συμπεριφορά τους. Έτσι, ενώ μας είναι γνωστό ότι η ύλη αποτελείται από μόρια, άτομα και διάφορα υποατομικά σωματίδια που κινούνται το ένα ως προς το άλλο σε μεγάλες αποστάσεις σε σχέση με το ίδιο τους το μέγεθος, απλοποιούμε την πραγματικότητα αγνοώντας την ασυνεχή αυτή δομή των υλικών σωμάτων και θεωρώντας τα ως συνεχή μέσα, δηλαδή ως αποτελούμενα από συνεχώς κατανεμημένη ύλη. Η απλουστευτική αυτή παραδοχή αποδεικνύεται από την εμπειρία μας ως πλήρως ικανοποιητική, εφόσον τα υλικά σώματα που εξετάζουμε (δηλαδή τα δομικά στοιχεία και οι δομικές κατασκευές) έχουν διαστάσεις πάρα πολύ μεγαλύτερες από εκείνες των ατομικών σωματιδίων, αποτελούνται δηλαδή από πρακτικώς άπειρα άτομα. Επίσης, υπό την επενέργεια εξωτερικών αιτίων (διάφορα φορτία, θερμοκρασιακές μεταβολές κτλ.) τα συνεχή σώματα μεταβάλλουν κατά κανόνα τη μορφή τους, είναι δηλαδή γενικώς παραμορφώσιμα. Εντούτοις, σε πολλές περιπτώσεις προβλημάτων η παραμόρφωση ενός σώματος μπορεί να θεωρηθεί αμελητέα (π.χ. η παραμόρφωση ενός ογκώδους πεδίλου θεμελίωσης σε σχέση με την παραμόρφωση του επ' αυτού υποστυλώματος), οπότε είναι θεμιτή η παραδοχή του απολύτως στερεού σώματος, στο οποίο οι αποστάσεις μεταξύ δύο οποιωνδήποτε σημείων του παραμένουν αναλλοίωτες. Ακόμη, όπως γνωρίζουμε από τη Φυσική, χάριν συστηματικότερης μελέτης διαφόρων προβλημάτων εισάγεται και η έννοια του υλικού σημείου, δηλαδή ενός υλικού σώματος μηδενικών διαστάσεων, αλλά πεπερασμένης μάζας, το οποίο σε συγκεκριμένη χρονική στιγμή κατέχει ορισμένη θέση στον χώρο. Τέλος, η υλική συμπεριφορά των παραμορφώσιμων σωμάτων προσομοιώνεται περαιτέρω με πολλούς και διάφορους τρόπους, π.χ. ως γραμμικά ελαστική, ελαστοπλαστική κτλ., ανάλογα με το εκάστοτε προς επίλυση πρόβλημα. Βάσει των παραπάνω εξιδανικεύσεων και άλλων συναφών παραδοχών και απλοποιήσεων μπορεί - χάριν συστηματικότερης μελέτης - να υποδιαιρεθεί τόσο η Μηχανική όσο και η Στατική σε επί μέρους τομείς, όπως ήδη είδαμε στις παραγράφους 1.2 και 1.3 του προηγούμενου κεφαλαίου. Στο παρόν βιβλίο η συμπεριφορά των υλικών θεωρείται γραμμικά ελαστική και επομένως όλες οι παρουσιαζόμενες εδώ μέθοδοι κινούνται μέσα στα όρια της θεωρίας της ελαστικότητας και ειδικότερα της Ελαστοστατικής.
2-8
Σ T
A Τ
Ι Κ Η
Ι

ΣΤΑΤΙΚΗ ΤΩΝ ΚΑΤΑΣΚΕΥΩΝ – Τόμος Ι – Θεμελιώδεις αρχές και ισοστατικοί φορείς
2.2 Τα είδη των δομικών στοιχείων και η γεωμετρική εξιδανίκευσή τους Ο φέρων οργανισμός (δομικός φορέας) των κατασκευών συντίθεται από επί μέρους φέροντα δομικά στοιχεία, τα οποία είναι γενικώς τρισδιάστατα υλικά σώματα. Λόγω όμως της πολυπλοκότητας και των δυσκολιών που παρουσιάζει η επίλυση τρισδιάστατων δομικών φορέων, αναζητούνται τρόποι απλοποίησής τους και αναγωγής τους σε φορείς μόνο μίας ή δύο διαστάσεων. Προς τούτο ταξινομούνται τα επί μέρους δομικά στοιχεία από τα οποία συντίθενται οι κατασκευές
(α) με βάση τη γεωμετρική μορφή τους σε γραμμικά στοιχεία, επιφανειακά στοιχεία και στοιχεία όγκου (βλ. παρακάτω υποπαραγρ. 2.2.1, 2.2.2 και 2.2.3), και
(β) για κάθε γεωμετρική μορφή με βάση τη μηχανική τους συμπεριφορά, τον τρόπο δηλαδή που καταπονούνται κατά τη μεταβίβαση των φορτίων και καταναγκασμών που δέχονται (βλ. επόμενη παράγραφο 2.3).
2.2.1 Μονοδιάστατα ή ραβδόμορφα ή γραμμικά στοιχεία Στα γραμμικά δομικά στοιχεία (Σχ. 2.2.1-1) οι δύο διαστάσεις (διαστάσεις b και h της διατομής τους) είναι πολύ μικρότερες από την τρίτη (το αξονικό τους μήκος Lx). Προκειμένου να επικεντρωθεί η μελέτη στα ουσιώδη και να απλοποιηθούν οι αναγκαίοι υπολογισμοί, τα τρισδιάστατα στην πραγματικότητα δομικά αυτά στοιχεία αντικαθίστανται από μία γραμμή που αντιπροσωπεύει τον κεντροβαρικό τους άξονα και από ένα (άπειρο) σύνολο διατομών κάθετων στον άξονα αυτόν. Στο μηχανικό προσομοίωμα (στατικό μοντέλο) τα γραμμικά στοιχεία απεικονίζονται μόνο μέσω του άξονά τους. Το μήκος τους L υπεισέρχεται άμεσα στους υπολογισμούς, ενώ οι διαστάσεις της διατομής τους υπεισέρχονται στους υπολογισμούς εμμέσως μέσω των συνολικών γεωμετρικών μεγεθών της διατομής (π.χ. για ορθογωνική διατομή διαστάσεων b και h: Εμβαδόν διατομής Α=b·h, ροπή αδράνειας Ι=b·h3/12, κτλ.). Σημειώνεται ότι ένα γραμμικό στοιχείο μπορεί να είναι ευθύγραμμο ή καμπύλο και ότι ο άξονας ενός καμπύλου γραμμικού στοιχείου μπορεί να βρίσκεται είτε μέσα στο ίδιο επίπεδο είτε να αποτελεί μια καμπύλη στον τρισδιάστατο χώρο. Στα μονοδιάστατα δομικά στοιχεία συγκαταλέγεται και το καλώδιο ή σχοινί (βλ. παρακάτω σχήματα 2.3.1-4 και 2.3.1-5).
∏
∏
∏
∏
∏
∏ yz
xb
h
L
h
bL
b, há L
h
bL
xy
z
Σχ. 2.2.1-1 Γραμμικά στοιχεία (ευθύγραμμα, καμπύλα)
2-9
Σ T
A Τ
Ι Κ Η
Ι

Κεφάλαιο 2. Οι κατασκευές και τα προσομοιώματά τους
2.2.2 Δισδιάστατατα ή επιφανειακά στοιχεία Στα επιφανειακά δομικά στοιχεία η μία τους διάσταση (πάχος h) είναι μικρή έναντι των άλλων δύο Lx και Ly (Σχ. 2.2.2-1). Στο μηχανικό προσομοίωμα (στατικό μοντέλο) αρκεί η απεικόνιση μόνο των δύο αυτών διαστάσεων, ενώ το πάχος υπεισέρχεται στους υπολογισμούς ως απλή παράμετρος.
yz
x h
L y
Lx
yz
x h
háLx, Ly
Σχ. 2.2.2-1 Επιφανειακά στοιχεία (επίπεδα, καμπύλα)
2.2.3 Τρισδιάστατα στοιχεία ή στοιχεία όγκου Στα στοιχεία όγκου καμία από τις τρεις διαστάσεις δεν υστερεί έναντι των άλλων δύο και συνεπώς δεν μπορεί να γίνει καμία απλοποίηση γεωμετρικού τύπου (Σχ. 2.2.3-1). Όλες οι διαστάσεις οφείλουν να λαμβάνονται εξίσου υπόψη. Τα στοιχεία αυτά χρησιμοποιούνται για την προσομοίωση ογκωδών φορέων (π.χ. φράγματα όγκου), για την προσομοίωση περιοχών του εδάφους θεμελίωσης και σε ορισμένες άλλες ειδικές περιπτώσεις, κυρίως μέσα στο γενικότερο πλαίσιο της μεθόδου των πεπερασμένων στοιχείων.
yz
x
Lx
Lz
Ly Σχ. 2.2.3-1 Στοιχείο όγκου
2-10
Σ T
A Τ
Ι Κ Η
Ι

3
ΘΕΜΕΛΙΩΔΕΙΣ ΑΡΧΕΣ ΤΗΣ ΣΤΑΤΙΚΗΣ
ΤΩΝ ΓΡΑΜΜΙΚΩΝ ΦΟΡΕΩΝ
Σ T
A Τ
Ι Κ Η
Ι

Φωτογραφίες
Άνω: Η τοξωτή γέφυρα της Πύλης/Τρίκαλα (1514)
Κάτω: Το ιστορικό γεφύρι του Μανώλη στον ποταμό Αγραφιώτη/Ευρυτανία (1659)
Σ T
A Τ
Ι Κ Η
Ι

ΣΤΑΤΙΚΗ ΤΩΝ ΚΑΤΑΣΚΕΥΩΝ - Τόμος Ι - Θεμελιώδεις αρχές και ισοστατικοί φορείς
3. ΘΕΜΕΛΙΩΔΕΙΣ ΑΡΧΕΣ ΤΗΣ ΣΤΑΤΙΚΗΣ ΤΩΝ ΓΡΑΜΜΙΚΩΝ ΦΟΡΕΩΝ
Η υλοποίηση ενός δομικού φορέα ξεκινάει με τη σύλληψη και τον σχεδιασμό του και συνεχίζεται με την επιλογή από τον μελετητή-μηχανικό ενός ή περισσοτέρων κατάλληλων προσομοιωμάτων του, τα οποία αποτελούν το αντικείμενο των στατικών (και ενδεχομένως δυναμικών) υπολογισμών (βλ. παράγρ. 3.1.1). Οι υπολογισμοί αυτοί γίνονται με διάφορες στατικές μεθόδους που αναπτύχθηκαν μέσα στο πλαίσιο της αξιωματικά θεμελιωμένης Κλασικής Μηχανικής και συνεπώς είναι θεωρητικά πλήρως τεκμηριωμένες (βλ. παράγρ. 3.1.2). Οι μέθοδοι αυτές, μεταξύ των οποίων και οι μέθοδοι υπολογισμού γραμμικών φορέων που μας ενδιαφέρουν ιδιαίτερα στο παρόν σύγγραμμα (βλ. παράγρ. 3.1.3), εισάγουν και χρησιμοποιούν μία σειρά βασικών στατικών εννοιών (βλ. παράγρ. 3.1.4) και σε εξάρτηση από τις διάφορες πρόσθετες παραδοχές στις οποίες βασίζονται οδηγούν σε διαφορετικού βαθμού προσεγγίσεις της πραγματικής συμπεριφοράς των κατασκευών (π.χ. Γραμμική Στατική, Μη Γραμμική Στατική κ.ά.). Σε κάθε περίπτωση όμως οι μέθοδοι υπολογισμού οφείλουν να λαμβάνουν υπόψη τις τρεις βασικές συνθήκες της Στατικής που είναι οι συνθήκες ισορροπίας, οι συνθήκες συμβιβαστού και οι συνθήκες υλικής συμπεριφοράς (βλ. παράγρ. 3.1.5). Οι τρεις αυτές βασικές συνθήκες αποτελούν το κύριο μέρος του παρόντος κεφαλαίου 3 και - μετά τη σύντομη εισαγωγική παράγραφο 3.1 - αναπτύσσονται συστηματικά στις παραγράφους 3.2, 3.3 και 3.4. Εν συνεχεία, στην παράγραφο 3.5, γίνεται η παρουσίαση των διαφόρου βαθμού προσέγγισης υπολογιστικών θεωριών της Στατικής και διευκρινίζεται ο συσχετισμός τους βάσει των υποκείμενων παραδοχών τους, οι οποίες αναφέρονται στον τρόπο ικανοποίησης των προαναφερθεισών τριών βασικών συνθηκών. Το κεφάλαιο ολοκληρώνεται με την παράγραφο 3.6, η οποία αφορά στην εισαγωγική διατύπωση της αρχής των δυνατών έργων και της αρχής των συμπληρωματικών δυνατών έργων. Οι δύο αυτές εργικές αρχές ή προτάσεις είναι εξαιρετικής σημασίας για το συνολικό θεωρητικό οικοδόμημα της Στατικής και αποτελούν τη βάση για πολλές μεθόδους υπολογισμού στατικών φορέων.
3.1 Εισαγωγή
3.1.1 Σχεδιασμός, προσομοίωση και υπολογισμός δομικών φορέων
Η σύλληψη και ο σχεδιασμός ενός δομικού φορέα, καθώς και η μετατροπή του σε ένα ρεαλιστικό προσομοίωμα (μοντέλο), απαιτούν εμπεριστατωμένες στατικές και κατασκευαστικές γνώσεις, σημαντική πρακτική εμπειρία και στατική διαίσθηση. Ιδιαίτερα η προσομοίωση (μοντελοποίηση) του φορέα με τρόπο που να αποδίδει ικανοποιητικά την πραγματική μηχανική συμπεριφορά του υπό τις διάφορες φορτίσεις προϋποθέτει την ικανότητα αφαίρεσης επουσιωδών χαρακτηριστικών του όλου προβλήματος και εστίασης στις σημαντικές μηχανικές ιδιότητες του φορέα και
3-3
Σ T
A Τ
Ι Κ Η
Ι

Κεφάλαιο 3. Θεμελιώδεις αρχές της Στατικής των γραμμικών φορέων
των επ' αυτού δράσεων. Όπως είδαμε στο κεφάλαιο 2, τα βασικά σημεία της προσομοίωσης αφορούν
στη γεωμετρική προσομοίωση του δομικού φορέα (φορέας θεμελίωσης και φέρων οργανισμός της ανωδομής),
στην υλική προσομοίωση του δομικού φορέα και του εδάφους θεμελίωσης, και
στην προσομοίωση των διαφόρων δράσεων (φορτίσεων) επί της κατασκευής.
Είναι περισσότερο από σαφές ότι οποιοδήποτε προσομοίωμα ενός πραγματικού φορέα δεν μπορεί να αποδώσει παρά μόνο κατά προσέγγιση την πραγματική του συμπεριφορά. Κατά συνέπεια, κάθε μοντέλο είναι επιδεκτικό βελτίωσης, χωρίς όμως να ξεχνάμε ότι η "αρχή της αρμονικής ακρίβειας" (βλ. παράγρ. 2.1.3) επιβάλλει την προσαρμογή των δυνατοτήτων του μοντέλου στις απαιτήσεις του εκάστοτε προς επίλυση προβλήματος. Τον καθορισμό ενός ρεαλιστικού μοντέλου του εκάστοτε δομικού φορέα ακολουθεί ο στατικός (ή και δυναμικός) υπολογισμός του, ο οποίος βασίζεται σε καλά τεκμηριωμένες επιστημονικές/τεχνικές θεωρίες που με ελεγχόμενη ακρίβεια αποδίδουν ποσοτικά τη συμπεριφορά του. Ο καθορισμός και εν συνεχεία υπολογισμός ενός ρεαλιστικού μοντέλου του υπό μελέτη δομικού φορέα είναι αναγκαίος για τον έλεγχο της ορθότητας του αρχικού σχεδιασμού και για την εξασφάλιση μιας ικανοποιητικής μηχανικής συμπεριφοράς του δομικού φορέα καθόλη τη διάρκεια ζωής του, είναι δηλαδή απαραίτητος προκειμένου να απαντηθούν τα εξής ερωτήματα:
Ικανοποιεί ο φορέας τις απαιτήσεις αντοχής και ασφάλειας έναντι όλων των πιθανών επιδράσεων του περιβάλλοντος (φορτία χρήσης, άνεμος, χιόνι, σεισμός κτλ.);
Ικανοποιεί ο φορέας τις απαιτήσεις λειτουργικότητας, έτσι ώστε να εξυπηρετούνται χωρίς προβλήματα οι ανάγκες χρήσης για τις οποίες σχεδιάστηκε;
Τα μεγέθη που πρέπει να υπολογιστούν και να ελεγχθούν είναι αφενός οι διάφορες δυνάμεις και εντάσεις που αναπτύσσονται στον φορέα και αφετέρου οι μετακινήσεις και οι παραμορφώσεις του.
3.1.2 Η αξιωματική θεμελίωση της Στατικής
Οι επιστημονικές θεωρίες που αποτελούν τη βάση των στατικών (και δυναμικών) υπολογισμών είναι η Κλασική Μηχανική (ή Νευτώνεια Μηχανική) και η Ευκλείδεια Γεωμετρία. Και οι δύο ανήκουν σε εκείνη την κατηγορία επιστημών που θεμελιώνονται αξιωματικά. Αυτό σημαίνει ότι οι προαναφερθείσες θεωρίες στηρίζονται
3-4
Σ T
A Τ
Ι Κ Η
Ι

ΣΤΑΤΙΚΗ ΤΩΝ ΚΑΤΑΣΚΕΥΩΝ - Τόμος Ι - Θεμελιώδεις αρχές και ισοστατικοί φορείς
σε μία σειρά θεμελιωδών εννοιών που δεν ορίζονται περαιτέρω
και
σε μία σειρά ολίγων θεμελιωδών αρχών που ονομάζονται αξιώματα και που δεν μπορούν να αναχθούν σε άλλες απλούστερες ούτε και να αποδειχθούν μαθηματικώς.
Στις θεμελιώδεις έννοιες που αφορούν στο ίδιο το πλαίσιο αναφοράς μέσα στο οποίο εκτυλίσσονται τα μηχανικά φαινόμενα ανήκουν οι έννοιες του χώρου και του χρόνου. Σ' αυτές προστίθενται οι επίσης θεμελιώδεις έννοιες της ύλης ή του υλικού σώματος, της μάζας και της δύναμης. Οι έννοιες αυτές δεν ορίζονται ρητά, αλλά εμμέσως από τον τρόπο που χρησιμοποιούνται στη διατύπωση των αξιωμάτων, γίνονται δε κατανοητές διαισθητικά βάσει της γενικής εμπειρίας μας με τα φυσικά φαινόμενα. Το γεγονός ότι δεν πρόκειται για απόλυτες έννοιες, δηλαδή για έννοιες που αντιστοιχούν πλήρως στην πραγματικότητα (ό,τι κι αν σημαίνει το "πλήρως"), αλλά για έννοιες-μοντέλα, δηλαδή έννοιες που απλώς προσεγγίζουν την πραγματικότητα εξιδανικεύοντάς την, συνειδητοποιήθηκε και έγινε προφανές με τη διατύπωση της Ειδικής Θεωρίας της Σχετικότητας το 1905 από τον Einstein και λίγο αργότερα με την ανάπτυξη της Κβαντομηχανικής. Ακολουθούν - χάριν υπενθύμισης - λίγα λόγια για τις βασικές έννοιες του χώρου, του χρόνου, της μάζας και της δύναμης.
Χώρος Η έννοια του χώρου συγκεκριμενοποιείται με την παραδοχή ισχύος της Ευκλείδειας Γεωμετρίας: Ο πραγματικός χώρος θεωρείται ότι έχει τις ιδιότητες του τρισδιάστατου συνεχούς Ευκλείδειου χώρου, στον οποίο, π.χ., το άθροισμα των γωνιών ενός τριγώνου που σχηματίζεται από τρεις ακτίνες φωτός είναι 180 μοίρες. Η θέση ενός σημείου A (που μπορεί να ανήκει σε ένα υλικό σώμα) στον χώρο καθορίζεται από τις τρεις συντεταγμένες του ΧΑ, ΥΑ, ΖΑ σε ένα τρισορθογώνιο δεξιόστροφο (καρτεσιανό) σύστημα αναφοράς με αρχή το σημείο αναφοράς Ο (Σχ. 3.1.2-1).
X
ZY
Y
O
A
XAAZ
A
Σχ. 3.1.2-1 Καρτεσιανό σύστημα αναφοράς στον τρισδιάστατο συνεχή Ευκλείδειο χώρο
3-5
Σ T
A Τ
Ι Κ Η
Ι

Κεφάλαιο 3. Θεμελιώδεις αρχές της Στατικής των γραμμικών φορέων
Χρόνος Για τον πλήρη καθορισμό ενός φυσικού γεγονότος δεν αρκεί μόνο η γνώση των χωρικών συντεταγμένων του σημείου στο οποίο εμφανίζεται, αλλά απαιτείται και η γνώση του χρόνου, δηλαδή της χρονικής στιγμής, κατά την οποία αυτό λαμβάνει χώρα. Ο χρόνος θεωρείται ως μονοδιάστατο, ομοιογενές και ισότροπο συνεχές και μπορεί έτσι να παρασταθεί με έναν και μόνο άξονα χρονικών συντεταγμένων. Μέσα στο πλαίσιο της Νευτώνειας Μηχανικής η έννοια του χρόνου είναι ανεξάρτητη από εκείνη του χώρου (σε αντίθεση με τον χωροχρόνο της Σχετικιστικής Μηχανικής). Στη Στατική, που μας ενδιαφέρει εδώ, ο χρόνος εξ ορισμού δεν παίζει κανέναν απολύτως ρόλο: Οι διάφορες φορτίσεις που δρουν επάνω στην κατασκευή θεωρούνται ως «απείρως αργά προσαγόμενες» (στατικές φορτίσεις) και έτσι, ελλείψει επιταχύνσεων, δεν προκαλούνται δυναμικά φαινόμενα βλ. παράγρ. 2.6.2-Δ). Μάζα Τα φυσικά σώματα που αποτελούν το αντικείμενο της Μηχανικής δεχόμαστε ότι αποτελούνται από ύλη, η οποία ποσοτικά χαρακτηρίζεται από τη μάζα της. Η μάζα ενός φυσικού σώματος θεωρείται ανεξάρτητη από την κινητική του κατάσταση και δεν επηρεάζει τη γεωμετρία του περιβάλλοντος χώρου (σε αντίθεση με τη Σχετικιστική Μηχανική). Έτσι, π.χ., δύο σώματα που έλκονται με τον ίδιο τρόπο (με την ίδια δύναμη) από τη Γη θεωρούμε ότι έχουν την ίδια μάζα. Στη Στατική, η οποία εξ ορισμού ασχολείται με σώματα που ισορροπούν και άρα δεν επιταχύνονται, η μάζα λαμβάνεται υπόψη μόνον υπό την έννοια του βάρους της, δηλαδή του φορτίου με το οποίο επιβαρύνει την κατασκευή. Οι αδρανειακές ιδιότητες της μάζας όταν αυτή κινείται λαμβάνονται υπόψη στη Δυναμική. Δύναμη Τέλος, με την έννοια της δύναμης, που αποτελεί κεντρική θεμελιώδη έννοια της Μηχανικής, θέλουμε να εκφράσουμε την αιτία που προκαλεί μεταβολές στην κινητική και παραμορφωσιακή κατάσταση των φυσικών σωμάτων. Όσον αφορά σε δομικές κατασκευές υπό στατική φόρτιση, οι δυνάμεις (=στατικά φορτία) που ασκούνται σ’ αυτές προκαλούν μεταβολές των θέσεων των διαφόρων σημείων τους (μετακινήσεις) και, σε εξάρτηση από τις ιδιότητες του δομικού υλικού από το οποίο αποτελούνται, παραμορφώσεις (σχετικές μετακινήσεις μεταξύ δύο σημείων).
Στα πλαίσια της Κλασικής (Νευτώνειας) Μηχανικής οι έννοιες του χώρου, του χρόνου και της μάζας θεωρούνται έννοιες απόλυτες και ανεξάρτητες μεταξύ τους (Σημ.: Αντίθετα, στη Σχετικιστική Μηχανική ο χρόνος ενός συμβάντος εξαρτάται από τη θέση του στον χώρο και η μάζα ενός σώματος εξαρτάται από την κινητική του κατάσταση). Η έννοια όμως της δύναμης δεν είναι ανεξάρτητη. Σύμφωνα με τα αξιώματα της Νευτώνειας Μηχανικής, η δύναμη που ασκείται σε ένα σώμα εξαρτάται από τη μάζα του σώματος και από τη χρονική διακύμανση της ταχύτητάς του (δηλαδή από την επιτάχυνσή του).
3-6
Σ T
A Τ
Ι Κ Η
Ι

ΣΤΑΤΙΚΗ ΤΩΝ ΚΑΤΑΣΚΕΥΩΝ - Τόμος Ι - Θεμελιώδεις αρχές και ισοστατικοί φορείς
Από τις παραπάνω θεμελιώδεις έννοιες και από τα αξιώματα της Κλασικής Μηχανικής (Σημ.: Όσα από τα αξιώματα αφορούν στη Στατική παρουσιάζονται στην παράγραφο 3.2.2), καθώς και με τη βοήθεια πρόσθετων εξιδανικεύσεων (π.χ. της έννοιας του απολύτως στερεού σώματος) και άλλων επιμέρους παραδοχών, σχηματίζονται συνθετότερες έννοιες και εξάγονται - βάσει των κανόνων της Λογικής - θεωρήματα και προτάσεις, των οποίων η ορθότητα ελέγχεται με την παρατήρηση και το πείραμα. Πράγματι, οι παρατηρήσεις και τα πειράματα τριών περίπου αιώνων έχουν καταστήσει την Κλασική Μηχανική - και κατά συνέπεια την Κλασική Στατική - μία από τις καλύτερα τεκμηριωμένες επιστήμες. Όπως θα δούμε σε επόμενες παραγράφους, στη Στατική γίνεται πολύ συχνά χρήση διαφόρων "αρχών". Πρόκειται εδώ είτε για τη μαθηματική διατύπωση κάποιου θεωρήματος ή κάποιας νομοτελειακής σχέσης (π.χ. "αρχή των δυνατών έργων") που συνάγεται από τα αξιώματα είτε για τη διατύπωση μιας μεθοδολογικής διαδικασίας, δηλαδή μιας σειράς ενεργειών διαδικαστικού χαρακτήρα (π.χ. "μέθοδος των διαχωριστικών τομών" ή "αρχή της αποδέσμευσης" κατά Lagrange). Αξιώματα, θεωρήματα, προτάσεις και αρχές αποτελούν τη βάση για την ανάπτυξη των διαφόρων μεθόδων υπολογισμού των στατικών μεγεθών που μας ενδιαφέρουν στη μελέτη των δομικών φορέων.
3.1.3 Η Στατική των Γραμμικών Φορέων και η Γραμμική Στατική
Στο παρόν σύγγραμμα μελετώνται γραμμικοί φορείς, δηλαδή φορείς που συντίθενται αποκλειστικά από γραμμικά στοιχεία (βλ. παράγρ. 2.8). Κατά συνέπεια, η μελέτη της στατικής συμπεριφοράς τους χαρακτηρίζεται ως Στατική των γραμμικών φορέων. Η Στατική των γραμμικών φορέων δεν πρέπει να συγχέεται με τη Γραμμική Στατική. Η δεύτερη περιλαμβάνει στα γνωστικά της αντικείμενα κάθε είδους φορείς, γραμμικούς και μη, των οποίων η μηχανική συμπεριφορά περιγράφεται αποκλειστικά με τη βοήθεια γραμμικών εξισώσεων, σε αντιδιαστολή με τη Μη Γραμμική Στατική, η οποία ασχολείται με προβλήματα που διατυπώνονται μέσω μη γραμμικών εξισώσεων. Υπάρχει έτσι η Γραμμική Στατική μη γραμμικών φορέων (π.χ. δίσκων, πλακών, κελυφών), όπως υπάρχει και η Μη Γραμμική Στατική γραμμικών φορέων (π.χ. θεωρία πλαστικότητας, θεωρία ελαστικής ευστάθειας κ.ά). Προς αποφυγή γλωσσικών παρεξηγήσεων, η Στατική των Γραμμικών Φορέων ονομάζεται συχνά Στατική των ραβδόμορφων φορέων ή και Ραβδοστατική. Και εδώ όμως υφίσταται ο κίνδυνος παρεξηγήσεων, διότι ο όρος ράβδος χρησιμοποιείται συχνά για να χαρακτηρίσει ένα γραμμικό στοιχείο που μπορεί να μεταφέρει μόνο αξονικά φορτία, ενώ βέβαια η Ραβδοστατική δεν ασχολείται μόνον με ράβδους υπό αυτήν την έννοια, αλλά και με δοκούς, οι οποίες ως γραμμικά στοιχεία είναι ραβδόμορφες και μεταφέρουν εκτός των αξονικών και εγκάρσια φορτία. Περισσότερες διευκρινίσεις για την οριοθέτηση της Γραμμικής Στατικής έναντι των μη γραμμικών θεωριών θα δοθούν στην παράγραφο 3.5.
3-7
Σ T
A Τ
Ι Κ Η
Ι

Κεφάλαιο 3. Θεμελιώδεις αρχές της Στατικής των γραμμικών φορέων
3.1.4 Τα βασικά στατικά μεγέθη
Τα στατικά μεγέθη είναι αφενός τα μεγέθη έντασης ή εντασιακά μεγέθη και αφετέρου τα μεγέθη παραμόρφωσης ή παραμορφωσιακά μεγέθη. Τα μεγέθη έντασης μπορεί να είναι δυνάμεις (αξονικές, τέμνουσες) ή ροπές (καμπτικές, στρεπτικές) ή τάσεις (ορθές, διατμητικές). Τα μεγέθη παραμόρφωσης μπορεί να είναι μετακινήσεις (μετατοπίσεις, στροφές) ή παραμορφώσεις (αξονικές, διατμητικές, καμπτικές, στρεπτικές).
Σημείωση σχετικά με την ορολογία: Έχει επικρατήσει η συνήθεια τα μεγέθη έντασης να αποκαλούνται "εντατικά" αντί του ορθού "εντασιακά". Ο γλωσσικά αδόκιμος αυτός επιθετικός προσδιορισμός καλό είναι να αποσυρθεί. Διαφορετικά η συνέπεια θα επέβαλε να χαρακτηρίζουμε π.χ. τα μεγέθη παραμόρφωσης ως "παραμορφωτικά" αντί του ορθού "παραμορφωσιακά".
Τα εντασιακά μεγέθη διακρίνονται σε εξωτερικά, που είναι τα φορτία που δρουν επάνω σε έναν φορέα (βλ. παράγρ. 2.6.1) και οι αντιδράσεις των στηρίξεων του φορέα, και σε εσωτερικά, που είναι οι δυνάμεις (καμπτικές και στρεπτικές ροπές, τέμνουσες και αξονικές δυνάμεις) που αναπτύσσονται μέσα στα δομικά στοιχεία και προκαλούν την επιπόνησή τους. Για τις εσωτερικές αυτές δυνάμεις έχει καθιερωθεί ο όρος 'φορτία διατομής'. Τα παραμορφωσιακά μεγέθη διακρίνονται κι αυτά σε εξωτερικά, που είναι οι προκύπτουσες λόγω οιασδήποτε φόρτισης μετακινήσεις (μετατοπίσεις, στροφές) των διαφόρων σημείων του φορέα και σε εσωτερικά, που είναι οι αξονικές, διατμητικές, καμπτικές και στρεπτικές παραμορφώσεις των διατομών του. Τα φορτία διατομής και οι αντιδράσεις των στηρίξεων χρησιμεύουν κυρίως για τον έλεγχο της αντοχής του φορέα. Τα φορτία διατομής οφείλουν γενικώς να είναι γνωστά σε κάθε σημείο του δομικού φορέα για όλες τις φορτίσεις του (εξωτερικές δυνάμεις και καταναγκασμοί, βλ. παράγρ. 2.6.1) και για τον σκοπό αυτό κατασκευάζονται τα διαγράμματα εντασιακών μεγεθών για κάθε σταθερή φόρτιση. Για να διαπιστωθεί η μεταβολή ενός εσωτερικού εντασιακού μεγέθους όταν το φορτίο μεταβάλλει την θέση επάνω στο φορέα (π.χ. μετακίνηση σιδηροδρομικού συρμού σε γέφυρα), κατασκευάζονται οι γραμμές επιρροής του. Οι μετακινήσεις και οι παραμορφώσεις χρησιμεύουν κυρίως για τον έλεγχο της λειτουργικότητας του φορέα. Τα παραμορφωσιακά αυτά μεγέθη οφείλουν γενικώς να είναι γνωστά σε χαρακτηριστικά σημεία του δομικού φορέα για όλες τις φορτίσεις (εξωτερικές δυνάμεις και καταναγκασμοί) του, όπου και ελέγχονται προκειμένου να μην υπερβούν καθορισμένα από τους Δομικούς Κανονισμούς οριακά μεγέθη. Συχνά, για συγκεκριμένη σταθερή φόρτιση, απαιτείται ο υπολογισμός των μετακινήσεων καθ’ όλο το μήκος κάποιου δομικού στοιχείου ή και όλου του φορέα, οπότε μιλάμε για τον υπολογισμό της ελαστικής γραμμής. Όπως και για μεγέθη έντασης, για να διαπιστωθεί η μεταβολή μιας μετακίνησης ή παραμόρφωσης όταν το φορτίο μεταβάλλει τη θέση επάνω στο φορέα κατασκευάζονται οι γραμμές επιρροής της.
3-8
Σ T
A Τ
Ι Κ Η
Ι

ΣΤΑΤΙΚΗ ΤΩΝ ΚΑΤΑΣΚΕΥΩΝ - Τόμος Ι - Θεμελιώδεις αρχές και ισοστατικοί φορείς
Όλες οι παραπάνω αναφερθείσες έννοιες, που ανήκουν στο εννοιολογικό «οπλοστάσιο» της Στατικής, δίνονται συνοπτικά στον πίνακα 3.1.4-1 και θα παρουσιαστούν διεξοδικά σε επόμενες παραγράφους.
Πίνακας 3.1.4-1 Βασικά στατικά μεγέθη γραμμικών φορέων
(μετακινήσεις)
Εντασιακά μεγέθη
Εξωτερικά εντασιακάμεγέθη
(φορτία και αντιδράσειςστηρίξεων)
Εξωτερικέςδυνάμεις
Εξωτερικέςροπές
Εσωτερικά εντασιακάμεγέθη
(φορτία διατομής)
Εσωτερικέςδυνάμεις
Εσωτερικέςροπές
Αξονικέςδυνάμεις
Τέμνουσεςδυνάμεις
Ροπέςκάμψης
Ροπέςστρέψης
Παραμορφωσιακά μεγέθη
Εξωτερικάπαραμορφωσιακά
μεγέθη
Μετατοπίσεις Στροφές
Εσωτερικάπαραμορφωσιακά
μεγέθη
Αξονικέςπαραμορφώσεις(επιμηκύνσεις,επιβραχύνσεις)
Διατμητικέςπαραμορφώσεις
(ολισθήσεις)
Καμπυλώσεις Συστροφές
3.1.5 Οι τρεις βασικές συνθήκες της Στατικής
Είναι προφανές ότι εφόσον η ένταση που αναπτύσσεται σε ένα δομικό στοιχείο προκαλεί την παραμόρφωσή του, τα προαναφερθέντα στατικά μεγέθη έντασης και παραμόρφωσης αλληλοεξαρτώνται και συνδέονται μεταξύ τους με συγκεκριμένες σχέσεις. Ο προσδιορισμός των σχέσεων αυτών αποτελεί κεντρικό αντικείμενο της Στατικής. Σε κάθε περίπτωση, τα στατικά μεγέθη που αναπτύσσονται σε έναν δομικό φορέα υπό την επιρροή εξωτερικών δράσεων οφείλουν να ικανοποιούν τις τρεις βασικές συνθήκες της Στατικής, που είναι οι εξής:
3-9
Σ T
A Τ
Ι Κ Η
Ι

Κεφάλαιο 3. Θεμελιώδεις αρχές της Στατικής των γραμμικών φορέων
Οι στατικές συνθήκες ή συνθήκες ισορροπίας των μεγεθών έντασης.
Οι γεωμετρικές συνθήκες ή συνθήκες συμβιβαστού των μεγεθών παραμόρφωσης.
Οι συνθήκες υλικής συμπεριφοράς (καταστατικοί νόμοι του υλικού).
Τα σχετικά με τις συνθήκες ισορροπίας των εντασιακών μεγεθών απορρέουν από την αξιωματική θεμελίωση της Κλασικής Μηχανικής. Οι συνθήκες συμβιβαστού των παραμορφωσιακών μεγεθών (μετακινήσεις και παραμορφώσεις) οφείλουν να υπακούουν στους κανόνες της Γεωμετρίας. Τέλος, οι καταστατικοί νόμοι που διέπουν την υλική συμπεριφορά των δομικών υλικών και συνδέουν τα μεγέθη έντασης με τα μεγέθη παραμόρφωσης βασίζονται στα πορίσματα της επιστήμης της Αντοχής των Υλικών. Αξίζει να τονιστεί εδώ ότι εξιδανικεύσεις και απλοποιήσεις γίνονται και όσον αφορά στην εφαρμογή των τριών αυτών βασικών συνθηκών σε δομικούς φορείς. Προκύπτουν έτσι υπολογιστικές θεωρίες διαφορετικών βαθμών προσέγγισης της πραγματικής συμπεριφοράς των φορέων (π.χ. η Γραμμική Στατική), όπως θα δούμε αναλυτικότερα στην παράγραφο 3.5. Προηγουμένως όμως, στις ακόλουθες παραγράφους 3.2, 3.3 και 3.4, θα ασχοληθούμε διεξοδικά με τις προαναφερθείσες τρεις βασικές συνθήκες της Στατικής.
3.2 Οι συνθήκες ισορροπίας Ως προετοιμασία για τη διατύπωση των συνθηκών ισορροπίας (ή στατικών συνθηκών) γίνεται μια σύντομη αναφορά σε ορισμένες βασικές έννοιες και αρχές της Κλασικής Μηχανικής.
3.2.1 Περί δυνάμεων και συστημάτων αναφοράς
Όπως προαναφέρθηκε, με την έννοια της δύναμης, που αποτελεί κεντρική και θεμελιώδη έννοια της Στατικής, θέλουμε να εκφράσουμε την αιτία που προκαλεί τις μεταβολές στην κινητική κατάσταση των φυσικών σωμάτων, δηλαδή, όσον αφορά σε δομικές κατασκευές, το αίτιο που προκαλεί τις μετακινήσεις (μεταβολές των θέσεων) των διαφόρων σημείων τους και τις αντίστοιχες παραμορφώσεις (σχετικές μεταβολές των θέσεων). Δεχόμαστε ότι οι δυνάμεις μπορούν να δρουν είτε εξ αποστάσεως (π.χ. δύναμη βαρύτητας, βάρος ενός σώματος) είτε εξ επαφής (π.χ. πίεση των χεριών μας επάνω σε ένα αντικείμενο που θέλουμε να μετακινήσουμε). Παρόλο που εφαρμόζοντας μυϊκή δύναμη έχουμε μία άμεση αίσθηση του τι σημαίνει δύναμη, την ίδια τη δύναμη δεν τη βλέπουμε, αλλά την αντιλαμβανόμαστε από τα αποτελέσματά της. Μπορεί έτσι να ειπωθεί ότι η δύναμη είναι μία αφηρημένη, θεωρητική έννοια που εισάγεται για να μας βοηθήσει στην περιγραφή
3-10
Σ T
A Τ
Ι Κ Η
Ι

ΣΤΑΤΙΚΗ ΤΩΝ ΚΑΤΑΣΚΕΥΩΝ - Τόμος Ι - Θεμελιώδεις αρχές και ισοστατικοί φορείς
και ερμηνεία των μηχανικών φαινομένων. Στη δύναμη προσδίδουμε τις ιδιότητες διανύσματος: Τη χαρακτηρίζουμε από το σημείο εφαρμογής της, το μέτρο (μέγεθός) της, τη διεύθυνση (γραμμή) δράσης της και τη φορά της, και την συμβολίζουμε με ένα βέλος (Σχ.3.2.1-1).
•
YZ
OX
F
Σημείο εφαρμογής
μέτρο
φορά
διεύθυνση
Σχ. 3.2.1-1 Στοιχεία καθορισμού μιας δύναμης F ως διανύσματος στον τρισδιάστατο
Ευκλείδειο χώρο
Προφανώς, η έννοια της δύναμης εμπεριέχει και την παραδοχή ότι αυτή δρα ως συγκεντρωμένη δύναμη σε ένα σημείο. Εντούτοις, από την εμπειρία μας γνωρίζουμε ότι οι δυνάμεις που ασκούνται επάνω σε ένα φυσικό σώμα εφαρμόζονται πάντοτε είτε επάνω σε μία επιφάνεια πεπερασμένων διαστάσεων (π.χ. η πίεση του ανέμου επάνω στην εξωτερική επιφάνεια ενός κτιρίου ή του πεδίλου θεμελίωσης επάνω στο έδαφος) είτε σε όλο τον όγκο του σώματος (π.χ. φορτία βαρύτητας), πρόκειται δηλαδή για συνεχώς κατανεμημένες επιφανειακές ή χωρικές δυνάμεις. Είναι σαφές ότι πρόκειται για μία περαιτέρω εξιδανίκευση της πραγματικότητας που οδηγεί στη θεωρητική έννοια της συγκεντρωμένης δύναμης, έννοιας χρησιμότατης για τη μελέτη και επίλυση πάμπολλων προβλημάτων της Μηχανικής και βέβαια της Στατικής (βλ. παράγρ. 2.6.2-Δ). Παρόμοια εξιδανίκευση αποτελεί και η γραμμικώς κατανεμημένη δύναμη. Η έννοια της δύναμης, αν και δεν μπορεί να ορισθεί άμεσα, ορίζεται εμμέσως μέσα από τη διατύπωση των αξιωμάτων της Κλασικής Μηχανικής που καθορίζουν τις ιδιότητές της. Για την απεικόνιση της δύναμης ως διανύσματος στον χώρο χρησιμοποιήθηκε στο παραπάνω σχήμα 3.2.1-1 ένα καρτεσιανό σύστημα αναφοράς, αποτελούμενο από τους τρεις κάθετους μεταξύ τους άξονες X, Y, Z, οι οποίοι σχηματίζουν ένα δεξιόστροφο σύστημα συντεταγμένων με αρχή το σημείο Ο. Στη βιβλιογραφία χρησιμοποιούνται σχεδόν αποκλειστικώς τέτοια δεξιόστροφα συστήματα αναφοράς, στα οποία η θετική φορά (κατεύθυνση) του άξονα Z ταυτίζεται με την φορά εκείνου του διανύσματος στροφής, το οποίο στρέφει τον θετικό άξονα +X έτσι ώστε να συμπέσει με τον θετικό άξονα +Υ εκτελώντας τη μικρότερη στροφή (κανόνας του δεξιόστροφου κοχλία / εκπωμιστήρα).
3-11
Σ T
A Τ
Ι Κ Η
Ι

Κεφάλαιο 3. Θεμελιώδεις αρχές της Στατικής των γραμμικών φορέων
3.2.2 Τα αξιώματα της Στερεοστατικής
Οι θεμελιώδεις αρχές της Κλασικής Μηχανικής περιλαμβάνουν τα τρία αξιώματα που διατύπωσε ο Νεύτωνας στο μνημειώδες σύγγραμμά του "Philosophiae naturalis principia mathematica" (1687), την αρχή του παραλληλογράμμου, την αρχή της ολισθησιμότητας και τον Νευτώνειο νόμο της παγκόσμιας έλξης. Από τις έξι αυτές θεμελιώδεις αρχές οι τέσσερεις αφορούν στη Στατική και διατυπώνονται ακολούθως με συντομία.
A. Αξίωμα αδράνειας (1ο αξίωμα του Νεύτωνα)
Κάθε υλικό σημείο ή υλικό σώμα παραμένει σε κατάσταση ηρεμίας (αν αρχικά ηρεμούσε) ή ευθύγραμμης κίνησης με σταθερή ταχύτητα (αν αρχικά κινούνταν), εφόσον η συνισταμένη δύναμη που δρα επάνω του είναι μηδενική. Στην περίπτωση της Στατικής, όπου η ταχύτητα είναι εξ ορισμού ίση με το μηδέν (δηλ., το σώμα ηρεμεί = ισορροπεί), το παραπάνω αξίωμα διατυπώνεται ως η αρχή της στατικής ισορροπίας:
Αν η διανυσματική συνισταμένη ΣFi όλων των δυνάμεων Fi που δρουν επάνω σε ένα σώμα είναι ίση με το μηδέν, τότε το σώμα αυτό ισορροπεί - και αντιστρόφως.
Έτσι, π.χ. ένα ισορροπούν υλικό σώμα μάζας m που εδράζεται επάνω σε μία ακλόνητη επιφάνεια υφίσταται αφενός τη δύναμη F1 που είναι ίση με το βάρος του G (σύμφωνα με το 2ο αξίωμα του Νεύτωνα ισχύει: G=mg, όπου g=9.81m/sec2 η επιτάχυνση της βαρύτητας) και αφετέρου τη δύναμη F2 που είναι η ίση και αντίθετη προς την F1 αντίδραση στήριξης (Σχ. 3.2.2-1).
Σώμα μάζας m
F =G1
F =G2 (Αντίδραση στήριξης)
(βάρος)
Σχ. 3.2.2-1 Ισορροπούν σώμα βάρους G=mg επί ακλόνητης επιφάνειας έδρασης
B. Αξίωμα της ολισθησιμότητας των δυνάμεων (Αρχή του Varignon1)
Σε ένα απολύτως στερεό σώμα, δηλαδή σε ένα σώμα στο οποίο οι αμοιβαίες αποστάσεις των διαφόρων σημείων του δεν μεταβάλλονται υπό οποιαδήποτε
1 PIERRE VARIGNON (1654-1722), Γάλλος μαθηματικός. Αναγνώρισε πρώτος τον διανυσματικό χαρακτήρα της στατικής ροπής μιας δύναμης ως προς έναν άξονα και διατύπωσε διάφορες θεωρίες θραύσης για την ευθύγραμμη δοκό.
3-12
Σ T
A Τ
Ι Κ Η
Ι

ΣΤΑΤΙΚΗ ΤΩΝ ΚΑΤΑΣΚΕΥΩΝ - Τόμος Ι - Θεμελιώδεις αρχές και ισοστατικοί φορείς
επιρροή (βλ. παράγρ. 2.1.5), το αποτέλεσμα μιας δύναμης που δρα επάνω του παραμένει το ίδιο, αν το σημείο εφαρμογής της μετακινηθεί επάνω στη γραμμή δράσης της (Σχ. 3.2.2-2(α)). Αυτό σημαίνει, ότι η δύναμη που ασκείται σε ένα απολύτως στερεό σώμα δεν είναι ένα δεσμευμένο, αλλά ένα ολισθαίνον διάνυσμα. Το αξίωμα αυτό δεν ισχύει για σώματα που δεν είναι απολύτως στερεά. Π.χ., ένα ελατήριο συμπεριφέρεται διαφορετικά στις δύο περιπτώσεις του σχήματος 3.2.2-2(β).
•
•
•
•
F
F
(α) (β) Σχ. 3.2.2-2 Ολισθησιμότητα δυνάμεων (α) επιτρεπτή όταν η δύναμη δρα σε απολύτως στερεό σώμα, (β) μη επιτρεπτή όταν η δύναμη δρα σε παραμορφώσιμα σώματα
Γ. Αξίωμα της ισότητας δράσης και αντίδρασης (3ο αξίωμα του Νεύτωνα)
Η δύναμη FΑΒ (δράση, actio) που ασκεί ένα υλικό σημείο ή σώμα Α σε ένα άλλο υλικό σημείο ή σώμα Β είναι ίση και αντίθετη (δηλαδή έχει ίδιο μέγεθος και ίδια διεύθυνση, αλλά αντίθετη φορά) με τη δύναμη FΒΑ (αντίδραση, reactio) που ασκείται από το Β στο Α (Σχ. 3.2.2-3), δηλαδή "actio = reactio".
FΑΒFΒΑ
σώμα Α
σώμα Β
Σχ. 3.2.2-3 Δράση FΑΒ = Αντίδραση FΒΑ
Σύμφωνα με το αξίωμα αυτό, οι δυνάμεις εμφανίζονται στη φύση κατά ζεύγη ίσων και αντίθετων δυνάμεων.
3-13
Σ T
A Τ
Ι Κ Η
Ι

Κεφάλαιο 3. Θεμελιώδεις αρχές της Στατικής των γραμμικών φορέων
Δ. Αρχή του παραλληλογράμμου για τη σύνθεση δυνάμεων (Νόμος του Stevin1)
Δύο δυνάμεις αθροίζονται όπως τα αντίστοιχα διανύσματα. Δηλαδή: Η επιρροή δύο δυνάμεων F1 και F2 επάνω σε ένα υλικό σημείο ή σώμα είναι ίδια με την επιρροή μίας μόνο δύναμης, της συνισταμένης FR των δύο, η οποία προκύπτει ως διαγώνιος του παραλληλογράμμου που ορίζεται από τα διανύσματα των δύο δυνάμεων (Σχ. 3.2.2-4).
F1
F2
FR
Σχ. 3.2.2-4 Η αρχή του παραλληλογράμμου
Γενικότερα, βάσει της αρχής αυτής προσδίδονται στις δυνάμεις όλες οι ιδιότητες (πρόσθεσης, αφαίρεσης, εσωτερικού και εξωτερικού γινομένου) των διανυσμάτων. (Σημ.: Διανυσματικό χαρακτήρα έχουν και άλλα μεγέθη της Στατικής που θα εισαχθούν πιο κάτω, όπως π.χ. οι ροπές και οι μετακινήσεις). Τα παραπάνω αξιώματα εμπεριέχουν και εμμέσως ορίζουν τις θεμελιώδεις έννοιες της δύναμης, του υλικού σημείου και του υλικού σώματος. Η έννοια της δύναμης εμπεριέχεται και στο 2ο αξίωμα του Νεύτωνα (F=m·ü, Δύναμη F = Μάζα m X Επιτάχυνση ü) καθώς και στον νόμο της παγκόσμιας έλξης, που όμως δεν αφορούν στη Στατική, στην οποία εξ ορισμού η επιτάχυνση των σωμάτων (δηλαδή των δομικών φορέων) θεωρείται ίση με το μηδέν.
3.2.3 Δυνάμεις, ροπές και συνθήκες ισορροπίας
Από τα παραπάνω αξιώματα και με τη βοήθεια (α) μιας σειράς πρόσθετων εννοιών και ορισμών (π.χ. της έννοιας της
ροπής μιας δύναμης ως προς ένα σημείο ή ως προς έναν άξονα, της έννοιας των εσωτερικών δυνάμεων - φορτίων διατομής κ.ά.) και
(β) ορισμένων μεθοδολογικών προσεγγίσεων (π.χ. της αρχής της αποδέσμευσης κατά Lagrange) και απλοποιήσεων (π.χ. της αγνόησης των παραμορφώσεων κατά την κατάστρωση των συνθηκών ισορροπίας),
προκύπτουν αποδείξιμα θεωρήματα (προτάσεις) και σχέσεις που χρησιμοποιούνται ποικιλοτρόπως για τον υπολογισμό της μηχανικής συμπεριφοράς ενός δομικού φορέα υπό στατική φόρτιση. Έτσι, από τα παραπάνω αξιώματα προκύπτουν πρώτα οι συνθήκες ισορροπίας ενός υλικού σημείου και κατόπιν, με την εισαγωγή της έννοιας της ροπής, οι συνθήκες ισορροπίας ενός υλικού σώματος. 1 SIMON STEVIN (1548-1620), Φλαμανδός μαθηματικός και μηχανικός
3-14
Σ T
A Τ
Ι Κ Η
Ι

ΣΤΑΤΙΚΗ ΤΩΝ ΚΑΤΑΣΚΕΥΩΝ - Τόμος Ι - Θεμελιώδεις αρχές και ισοστατικοί φορείς
Α. Συνθήκες ισορροπίας ενός υλικού σημείου
Κάνοντας χρήση των προηγούμενων ορισμών, της αρχής του παραλληλογράμμου και του αξιώματος της αδράνειας αποδεικνύεται εύκολα η ακόλουθη πρόταση:
Ένα κεντρικό σύστημα δυνάμεων (δηλαδή ένα σύνολο Ν συντρεχουσών δυνάμεων Fn που διέρχονται από το ίδιο σημείο Α ή που ενεργούν επάνω στο ίδιο υλικό σημείο Α) ισορροπεί, όταν η συνισταμένη FR όλων των δυνάμεων μηδενίζεται (Σχ. 3.2.3-1).
YZ
A
OX
3F
1FF2
FR
1F 2F+
+
O
F1
2
F
3F
FA
1
Z
F2
RF
X
•
•
Σχ. 3.2.3-1 Κεντρικά συστήματα δυνάμεων (oμάδες συντρεχουσών δυνάμεων) στον χώρο
και στο επίπεδο ΧΖ
Στο τρισορθογώνιο σύστημα αναφοράς Ο-X-Y-Z προκύπτουν οι εξής τρεις συνθήκες ισορροπίας:
0F0F0F nZnYnX === ∑∑∑ (3.2.3-1)
Οι δείκτες X, Y και Z συμβολίζουν τις συνιστώσες της δύναμης Fn κατά την έννοια των αξόνων X, Y και Z του συστήματος αναφοράς αντίστοιχα. Η άθροιση γίνεται για n=1 έως Ν, όπου Ν το πλήθος των δυνάμεων που δρουν στο εν λόγω σημείο Α. Στο επίπεδο X-Ζ οι παραπάνω συνθήκες ισορροπίας περιορίζονται στις εξής δύο:
0F0F nZnX == ∑∑ (3.2.3-2)
Β. Η έννοια της ροπής και του ζεύγους δυνάμεων Ως στατική ροπή Μ (ή απλώς ροπή) μιας δύναμης F, η οποία ενεργεί στο σημείο Β ως προς έναν άξονα a-a που διέρχεται από ένα άλλο σημείο A και είναι κάθετος στο επίπεδο που σχηματίζει η δύναμη F με το διάνυσμα θέσης r=AB, ορίζεται ως το εξωτερικό διανυσματικό γινόμενο F x r (Σχ. 3.2.3-2). Συνεπώς, η ροπή είναι εξ ορισμού διανυσματικό μέγεθος με μέτρο ίσο με το γινόμενο της δύναμης επί την κάθετη απόσταση (μοχλοβραχίονα) s του σημείου εφαρμογής της από τον άξονα a-a στον οποίο αναφέρεται, με διεύθυνση αυτήν του άξονα a-a και με φορά κατά την έννοια του δεξιόστροφου κοχλία. Ισχύουν οι σχέσεις:
FssinθFrMMrFM ••• ===×= (3.2.3-3) 3-15
Σ T
A Τ
Ι Κ Η
Ι

Κεφάλαιο 3. Θεμελιώδεις αρχές της Στατικής των γραμμικών φορέων
A
Bθ
θ rs
FF ∏ F∏
a
a
M
s=r ∏ sinθ
•
•
••
Σχ. 3.2.3-2 Ορισμός της στατικής ροπής Σημειώνεται ότι το διάνυσμα της ροπής συμβολίζεται με ένα βέλος διπλής απόληξης προκειμένου να διακρίνεται από το απλό βέλος με το οποίο συμβολίζεται το διάνυσμα μιας δύναμης. Από τον παραπάνω ορισμό της ροπής μιας δύναμης ως προς έναν άξονα a-a προκύπτει άμεσα ότι αν το σημείο Β στο οποίο δρα η δύναμη βρίσκεται επάνω στον άξονα a-a, η ροπή της θα είναι ίση με το μηδέν. Επομένως, η παραπάνω ορισθείσα ροπή της δύναμης F ως προς έναν άξονα a-a ισοδυναμεί με ένα ζεύγος παράλληλων δυνάμεων F και -F σε απόσταση s η μία από την άλλη (Σχ. 3.2.3-3). Επειδή δε το ζεύγος αυτό μπορεί να ενεργεί οπουδήποτε στον χώρο σε παράλληλα πάντοτε επίπεδα, το διάνυσμα της ροπής δεν έχει ορισμένο σημείο εφαρμογής ούτε και ορισμένο άξονα ενέργειας, και συνεπώς είναι ένα ελεύθερο διάνυσμα. Προς διάκριση από το διάνυσμα της δύναμης εφοδιάζουμε το διάνυσμα της ροπής με διπλό βέλος.
a
F
B
A
BA
FF
M
F
F∏
s
= sF
M
BA
a
•
•
•
••
••
• •
•
Σχ. 3.2.3-3 Ορισμός ζεύγους δυνάμεων
Σημείωση σχετικά με την ορολογία:
Στις ακόλουθες παραγράφους οι δυνάμεις και οι ροπές θα χαρακτηρίζονται γενικώς και ενιαία ως «δυνάμεις» ή «μεγέθη δύναμης» ή «μεγέθη έντασης» ή «εντασιακά μεγέθη».
3-16
Σ T
A Τ
Ι Κ Η
Ι

ΣΤΑΤΙΚΗ ΤΩΝ ΚΑΤΑΣΚΕΥΩΝ - Τόμος Ι - Θεμελιώδεις αρχές και ισοστατικοί φορείς
Γ. Συνθήκες ισορροπίας ενός υλικού σώματος
Στη γενική περίπτωση, οι δυνάμεις που φορτίζουν τα τρισδιάστατα υλικά σώματα δεν διέρχονται όλες από το ίδιο σημείο και επομένως σχηματίζουν ένα γενικό (και όχι κεντρικό) σύστημα δυνάμεων, όπως π.χ. στο απλό παράδειγμα του σχήματος 3.2.3-4(α).
XO
ZY
LX
ZL
YL
4F
3F
(α)
A1F
F2
F(β)
4F
3F2
A F1
Μ2=F2 ∏LY
L= ∏3Μ F3 X
Y4Z 4FΜ ∏= L
Z4Y 4Μ F L= ∏
›
(γ)
A
›
F =συνιστ( )R ,2F ,3F F4 1F ,
M =συνιστ( )R ,2M , ,4YM 4ZMM3
•
•
•
Σχ. 3.2.3-4 Γενικό σύστημα δυνάμεων (γενική ομάδα δυνάμεων)
3-17
Σ T
A Τ
Ι Κ Η
Ι

Κεφάλαιο 3. Θεμελιώδεις αρχές της Στατικής των γραμμικών φορέων
Με βάση τους ορισμούς της ροπής και του ζεύγους δυνάμεων που δόθηκαν προηγουμένως είναι δυνατή η αναγωγή ενός γενικού συστήματος δυνάμεων σε ένα κεντρικό σύστημα δυνάμεων συν το σύστημα ροπών που προκύπτει από την παράλληλη μετάθεση των δυνάμεων αυτών. Έτσι, η μετάθεση των τριών δυνάμεων F2, F3 και F4 του παραδείγματός μας στο σημείο Α όπου δρα η δύναμη F1 προκειμένου να δημιουργηθεί ένα κεντρικό σύστημα δυνάμεων απαιτεί - προς διατήρηση της ισοδυναμίας με το δεδομένο γενικό σύστημα δυνάμεων - την προσθήκη των τεσσάρων ροπών Μ2=F2LY, Μ3=F3LX, Μ4Υ=F4LZ και Μ4Ζ=F4LΥ, όπου LΥ, LΧ οι μοχλοβραχίονες των F2, F3 και LΖ, LΥ οι μοχλοβραχίονες της F4 αντιστοίχως ως προς το σημείο Α (Σχ. 3.2.3-4(β)). Κάνοντας χρήση των προηγουμένων ορισμών, της αρχής του παραλληλογράμμου και του αξιώματος της αδράνειας αποδεικνύεται εύκολα η ακόλουθη πρόταση:
Ένα γενικό σύστημα δυνάμεων ισορροπεί, όταν η συνισταμένη FR όλων των δυνάμεων Fn και η συνισταμένη MR όλων των ροπών Mn ως προς οποιονδήποτε άξονα είναι ίσες με το μηδέν.
Στο τρισορθογώνιο σύστημα αναφοράς Ο-X-Y-Z προκύπτουν οι εξής έξι συνθήκες ισορροπίας:
0M0,M0,M0,F0,F0,F nZnYnXnZnYnX ====== ∑∑∑∑∑∑ (3.2.3-4)
Στο επίπεδο X-Z οι παραπάνω συνθήκες ισορροπίας περιορίζονται στις εξής τρεις:
0M 0,F 0,F nYnZnX === ∑∑∑ (3.2.3-5)
Οι δείκτες X, Y και Z συμβολίζουν τις συνιστώσες των δυνάμεων Fn και των ροπών τους Μn κατά την έννοια των αξόνων X, Y και Z του συστήματος αναφοράς αντίστοιχα. Η άθροιση περιλαμβάνει όλες τις δυνάμεις Fn του γενικού συστήματος δυνάμεων και όλες τις ροπές Mn των δυνάμεων Fn ως προς το σημείο Α, στο οποίο μετατέθηκαν οι δυνάμεις αυτές προκειμένου να συγκροτήσουν ένα κεντρικό σύστημα δυνάμεων.
Δ. Η ισορροπία ενός δομικού φορέα - Εξωτερικά εντασιακά μεγέθη
Στις συνθήκες ισορροπίας του υλικού σώματος που διατυπώθηκαν πιο επάνω το υλικό σώμα θεωρήθηκε ως ελεύθερο στον χώρο, δηλαδή χωρίς κανένα γεωμετρικό περιορισμό (δέσμευση) των πιθανών κινήσεων που θα μπορούσε να εκτελέσει. Οι δομικοί φορείς όμως που μας ενδιαφέρουν στη Στατική δεν είναι ελεύθερα σώματα, αλλά εδράζονται (στηρίζονται) στο στερεό έδαφος (στερεό υπόβαθρο) με διάφορους τρόπους (βλ. παράγρ. 2.4.2) προκειμένου να μεταφέρουν σ' αυτό τα φορτία με τα οποία τις φορτίζουμε. Συνεπώς, στα σημεία στήριξής τους οι δομικοί φορείς ασκούν δυνάμεις επί του εδάφους και σύμφωνα με το 3ο αξίωμα του Νέυτωνα (actio=reactio) το έδαφος ασκεί ίσες και αντίθετες δυνάμεις επί των
3-18
Σ T
A Τ
Ι Κ Η
Ι

ΣΤΑΤΙΚΗ ΤΩΝ ΚΑΤΑΣΚΕΥΩΝ - Τόμος Ι - Θεμελιώδεις αρχές και ισοστατικοί φορείς
φορέων, οι οποίες ονομάζονται αντιδράσεις στηρίξεων. Σύμφωνα με τα παραπάνω, οι δυνάμεις που δρουν επάνω σ’ έναν δομικό φορέα είναι αφενός τα δεδομένα φορτία του και αφετέρου οι αντιδράσεις των στηρίξεών του. Τα φορτία και οι αντιδράσεις στηρίξεων ενός φορέα συνιστούν τα εξωτερικά μεγέθη έντασης του φορέα αυτού. Τα φορτία, που χαρακτηρίζονται και ως επιβεβλημένα μεγέθη έντασης, είναι εξ αρχής γνωστά και ανήκουν στα δεδομένα του εκάστοτε προβλήματος. Αντίθετα, οι αντιδράσεις στηρίξεων ή απλά αντιδράσεις που αναπτύσσονται στα σημεία που ο φορέας εδράζεται στο στερεό έδαφος (στερεό υπόβαθρο) είναι καταρχάς άγνωστες και αποτελούν αντικείμενο των στατικών υπολογισμών. (Σημείωση: Όπως θα δούμε σε επόμενη παράγραφο, εκτός των εξωτερικών υπάρχουν και τα εσωτερικά μεγέθη έντασης ή φορτία διατομής. Αυτά είναι μεγέθη έντασης που αναπτύσσονται μέσα στα δομικά στοιχεία - δηλαδή στις διατομές - ενός φορτιζόμενου δομικού φορέα). Πέρα όμως από τον υπολογισμό των αντιδράσεων στήριξης, μας ενδιαφέρει πρωταρχικά να εξασφαλίσουμε ότι η στήριξη του δομικού φορέα στο έδαφος είναι στερεή (κινηματικά ευσταθής). Προκύπτουν λοιπόν κατά τη μελέτη της ισορροπίας ενός δομικού φορέα τα εξής δύο επιμέρους προβλήματα:
(1) Το πρόβλημα της στερεής (κινηματικά ευσταθούς) στήριξης του φορέα στο στερεό υπόβαθρο: Δεδομένου ότι ο δομικός φορέας δέχεται φορτία και τα μεταφέρει στο στερεό έδαφος θεμελίωσης μέσω των στηρίξεών του, πρέπει να εξετασθούν οι τρόποι με τους οποίους επιτυγχάνεται η κινηματικά ευσταθής στήριξή του.
(2) Το πρόβλημα του υπολογισμού των αντιδράσεων στήριξης του φορέα, εφόσον αυτός εδράζεται στερεά: Δεδομένου ότι ο φορτιζόμενος δομικός φορέας ισορροπεί όταν το σύνολο των δυνάμεων (δηλαδή τα γνωστά φορτία και οι άγνωστες αντιδράσεις στηρίξεων) που ασκούνται επάνω του έχει μηδενική συνισταμένη, οι αντιδράσεις στηρίξεων οφείλουν να υπολογίζονται με τρόπο που να ικανοποιεί τις συνθήκες ισορροπίας.
Τα δύο αυτά προβλήματα αποτελούν το αντικείμενο των επόμενων δύο παραγράφων υπό την προϋπόθεση ότι ο δομικός φορέας μπορεί να θεωρηθεί ως απολύτως στερεό σώμα αν αγνοηθούν οι παραμορφώσεις των δομικών του στοιχείων. Στην παράγραφο 3.2.4 θα εξεταστεί το πρόβλημα της στερεάς στήριξης ενός απολύτως στερεού δίσκου στο επίπεδο και ενός απολύτως στερεού σώματος στον χώρο, ενώ η παράγραφος 3.2.5 αφορά στα εξωτερικά εντασιακά μεγέθη και στο πρόβλημα υπολογισμού των αντιδράσεων στήριξης. Προκαταλαμβάνοντας τις αναπτύξεις των παραγράφων αυτών, αξίζει στο σημείο αυτό να σημειωθούν τα εξής:
(α) Το πρώτο πρόβλημα, δηλαδή αυτό της στερεάς στήριξης ενός φορέα, μπορεί να εξεταστεί και να επιλυθεί αυτοτελώς και ανεξάρτητα από το δεύτερο πρόβλημα. Μπορούμε δηλαδή να διαπιστώσουμε την κινηματική
3-19
Σ T
A Τ
Ι Κ Η
Ι

Κεφάλαιο 3. Θεμελιώδεις αρχές της Στατικής των γραμμικών φορέων
ευστάθεια ενός φορέα ανεξάρτητα από τα εκάστοτε φορτία του και άρα χωρίς να υπολογίσουμε τις αντιδράσεις των στηρίξεων του.
(β) Αντίθετα, ο υπολογισμός των αντιδράσεων στήριξης προϋποθέτει ότι η στήριξη είναι στερεή. Αν η στήριξη του φορέα δεν είναι στερεή, δεν είναι δυνατόν να υπολογιστούν οι αντιδράσεις στήριξης διότι αυτές δεν υφίστανται: Ο μη στερεά εδραζόμενος φορέας καταρρέει και επομένως ούτε ασκεί δυνάμεις επί του εδάφους ούτε το έδαφος ασκεί δυνάμεις επ΄αυτού. Αυτό όμως σημαίνει ότι απάντηση στο πρώτο πρόβλημα, δηλαδή στο πρόβλημα της στερεάς στήριξης ενός φορέα, μπορεί να δοθεί μέσω του υπολογισμού των αντιδράσεών του: Αν ο υπολογισμός των αντιδράσεων είναι αδύνατος (λόγω αδυναμίας ικανοποίησης των συνθηκών ισορροπίας), τότε (και μόνο τότε) ο φορέας δεν στηρίζεται στερεά, ενώ ο προσδιορισμός των αντιδράσεων (άσχετα με τη μέθοδο που θα χρησιμοποιηθεί για τον υπολογισμό τους) σημαίνει ότι η στήριξη του φορέα είναι στερεή.
(γ) Όπως προαναφέρθηκε (βλ. σημείο (2) πιο επάνω), φορτία και αντιδράσεις στηρίξεων οφείλουν να ικανοποιούν τις συνθήκες ισορροπίας. Θα δούμε όμως ότι ενώ για ορισμένους φορείς αρκεί για τον υπολογισμό των αντιδράσεων στήριξης η ικανοποίηση των συνθηκών ισορροπίας (στατικά ορισμένη στήριξη), για άλλους φορείς οι συνθήκες ισορροπίας δεν επαρκούν (στατικά αόριστη στήριξη). Στη δεύτερη περίπτωση θα πρέπει να προστρέξουμε στη βοήθεια και των δύο άλλων βασικών συνθηκών της Στατικής (βλ. παράγρ. 3.1.5), δηλαδή να ικανοποιήσουμε επιπροσθέτως τις συνθήκες συμβιβαστού και τις συνθήκες υλικής συμπεριφοράς.
Σημ.: Φορείς με στατικά αόριστη στήριξη ανήκουν στην κατηγορία των λεγόμενων υπερστατικών φορέων που αποτελούν αντικείμενο του δεύτερου τόμου του παρόντος συγγράμματος [Αβρ 2006-ΙΙ].
Τέλος, θα πρέπει να τονιστεί ότι οι δομικοί φορείς είναι κατά κανόνα σύνθετοι, δηλαδή αποτελούνται όχι μόνο από ένα, αλλά από περισσότερα υλικά σώματα που συνδέονται μεταξύ τους μέσω διαφόρων ειδών συνδέσεων-αρθρώσεων (βλ. παράγρ. 2.4.1). Οι συνδέσεις αυτές και γενικότερα η εσωτερική δομή ενός σύνθετου φορέα ενδέχεται να είναι τέτοιες ώστε (όπως θα δούμε στην επόμενη παράγραφο 3.2.4) η θεώρηση των δομικών του στοιχείων ως απαραμόρφωτων να μην συνεπάγεται ότι και ο σύνθετος φορέας είναι απαραμόρφωτος. Επομένως, τα προβλήματα της στερεής στήριξης ενός απολύτως στερεού δίσκου στο επίπεδο και ενός απολύτως στερεού σώματος στον χώρο (τα οποία αναπτύσσονται στις επόμενες δύο παραγράφους 3.2.4 και 3.2.5) οφείλουν να τεθούν γενικότερα έτσι ώστε να συμπεριλάβουν και τους σύνθετους δομικούς φορείς που δεν μπορούν να θεωρηθούν ως δίσκοι ή ως σώματα. Αυτό θα γίνει αργότερα στο κεφάλαιο 5.
3-20
Σ T
A Τ
Ι Κ Η
Ι

ΣΤΑΤΙΚΗ ΤΩΝ ΚΑΤΑΣΚΕΥΩΝ - Τόμος Ι - Θεμελιώδεις αρχές και ισοστατικοί φορείς
3.2.4 Η στήριξη ενός δομικού φορέα Εκ πείρας γνωρίζουμε ότι τα δομικά στοιχεία που συνθέτουν τους δομικούς φορείς εμφανίζουν υπό την επιρροή των ασκούμενων επάνω τους εξωτερικών φορτίσεων ορισμένες παραμορφώσεις, οι οποίες οφείλονται στην ενδοσιμότητα του υλικού από το οποίο είναι κατασκευασμένα. Αν π.χ. το υλικό κατασκευής είναι ελαστικό, όπως προϋποθέτουμε στο παρόν σύγγραμμα, τότε τα δομικά στοιχεία υφίστανται ελαστικές παραμορφώσεις, οι οποίες εξαφανίζονται όταν αποσύρουμε την εξωτερική φόρτιση. Οι οποιουδήποτε τύπου αυτές παραμορφώσεις των δομικών στοιχείων (ελαστικές ή μη) δεν επηρεάζουν καθόλου τη στήριξη του φορέα, η οποία συνίσταται σε καθαρά γεωμετρικούς περιορισμούς. Έτσι, π.χ. η στερεή στήριξη της απλής δοκού του σχήματος 2.3.1-7, η οποία υπό τη δράση των φορτίων της κάμπτεται (υφιστάμενη μάλιστα μη αναστρέψιμες ανελαστικές παραμορφώσεις), δεν επηρεάζεται, αν θεωρήσουμε τη δοκό ως τελείως απαραμόρφωτη. Και στις δύο περιπτώσεις (δηλαδή είτε δεχθούμε τη δοκό ως παραμορφώσιμη είτε ως μη παραμορφώσιμη) η στήριξη της δοκού παραμένει στερεή. Επομένως, για τη μελέτη των τρόπων στήριξης δομικών φορέων μπορούμε να αγνοήσουμε τις (ελαστικές ή/και ανελαστικές) παραμορφώσεις των στοιχείων τους και να τα θεωρήσουμε ως απολύτως απαραμόρφωτα (απολύτως στερεά) σώματα, δηλαδή σώματα στα οποία οι αμοιβαίες αποστάσεις των διαφόρων σημείων τους παραμένουν υπό οποιαδήποτε επιρροή αναλλοίωτες (βλ. παράγρ. 2.1.5). Το γεγονός όμως ότι θεωρούμε τα επιμέρους δομικά στοιχεία ενός φορέα ως απολύτως στερεά δεν συνεπάγεται πάντοτε ότι και ο φορέας είναι απολύτως στερεός. Αυτό συμβαίνει διότι οι φορείς αποτελούνται γενικώς από περισσότερα στοιχεία, τα οποία συνδέονται μεταξύ τους με αρθρώσεις διαφόρων τύπων (βλ. παράγρ. 2.4). Αν ο φορέας αποτελείται από ένα μόνο δομικό στοιχείο ή αν όλα τα δομικά στοιχεία του συνδέονται μεταξύ τους μονολιθικά (στερεά), τότε η αγνόηση των παραμορφώσεων των δομικών στοιχείων συνεπάγεται ότι και ο φορέας είναι απολύτως στερεός. Αν όμως τα θεωρούμενα ως απαραμόρφωτα δομικά στοιχεία (όλα ή ορισμένα από αυτά) συνδέονται μεταξύ τους αρθρωτά, τότε ενδέχεται ο σύνθετος φορέας να μην είναι απαραμόρφωτος. Απλά, αλλά χαρακτηριστικά παραδείγματα αποτελούν αφενός ο στερεός επίπεδος τριγωνικός ραβδοδίσκος (που συντίθεται από τρία γραμμικά στοιχεία συνδεδεμένα αρθρωτά μεταξύ τους) και αφετέρου ο κινηματικός (χαλαρός) επίπεδος σχηματισμός τεσσάρων (επίσης αρθρωτά συνδεδεμένων μεταξύ τους) γραμμικών στοιχείων (βλ. Σχ. 2.5.1-8). Στην παρούσα παράγραφο θα εξεταστεί συστηματικά το πρόβλημα στήριξης ενός δομικού φορέα θεωρώντας ότι αν αγνοηθούν οι παραμορφώσεις των δομικών του στοιχείων αυτός αποτελεί ένα απολύτως στερεό σώμα.
Α. Η στήριξη του δίσκου στο επίπεδο
Α1. Η έννοια του δίσκου Καταρχάς θα μελετήσουμε τους τρόπους στήριξης ενός απολύτως στερεού σώματος μέσα σε ένα συγκεκριμένο επίπεδο, π.χ. στο επίπεδο Χ-Ζ. Επειδή εν
3-21
Σ T
A Τ
Ι Κ Η
Ι

Κεφάλαιο 3. Θεμελιώδεις αρχές της Στατικής των γραμμικών φορέων
προκειμένω αγνοούμε την τρίτη (εκτός επιπέδου) διάσταση του υλικού σώματος, πρόκειται για το πρόβλημα στήριξης ενός επίπεδου σώματος, το οποίο δέχεται και μεταφέρει δυνάμεις μόνο εντός του επιπέδου του. Το επίπεδο αυτό απολύτως στερεό σώμα μπορεί να είναι ένας αμιγώς επιφανειακός φορέας, ένας αμιγώς γραμμικός φορέας ή συνδυασμός των δύο και μπορεί να αποτελείται από ένα μόνο ή από περισσότερα δομικά στοιχεία. Αν αποτελείται από ένα μόνο δομικό στοιχείο, πρόκειται για έναν απολύτως στερεό δίσκο (Σχ. 3.2.4-1(α1)) ή για ένα απολύτως στερεό γραμμικό στοιχείο (Σχ. 3.2.4-1(β1)). Αν συντίθεται από περισσότερα δομικά στοιχεία (δίσκους ή/και γραμμικά στοιχεία - δοκούς), αυτά θα πρέπει να συνδέονται μεταξύ τους με τρόπο που να εξασφαλίζει το απαραμόρφωτο του σύνθετου φορέα. Προφανώς, αυτό εξασφαλίζεται αν όλα τα δομικά στοιχεία συνδέονται μεταξύ τους μονολιθικά (δηλαδή όχι αρθρωτά), όπως π.χ. το πλαίσιο του σχήματος 3.2.4-1(β3). Σε περίπτωση αρθρωτών συνδέσεων των επιμέρους στοιχείων, η εσωτερική δομή του φορέα θα πρέπει να είναι τέτοια ώστε η αγνόηση των παραμορφώσεων των επιμέρους στοιχείων να καθιστά απαραμόρφωτο ολόκληρο τον φορέα. Αυτό συμβαίνει π.χ. για τον ήδη γνωστό μας τριγωνικό ραβδοδίσκο (Σχ. 3.2.4-1(β2)). Αν θεωρήσουμε ότι τα τρία αρθρωτά συνδεδεμένα στοιχεία του δεν μπορούν να παραμορφωθούν (δηλαδή παραμένουν ευθύγραμμα και διατηρούν το μήκος τους), τότε είναι διαισθητικά σαφές ότι η μορφή του σχηματισμού αυτού παραμένει αναλλοίωτη. Το ίδιο ισχύει προφανώς για έναν ανάλογο σχηματισμό επιφανειακών στοιχείων (βλ. Σχ. 3.2.4-1(α2)).
Επιφανειακοί φορείς
(α1) Μεμονωμένος δίσκος
(α2) Στερεό σύμπλεγματριών δίσκων αρθρωτά
(β1) Μεμονωμένη δοκός
(β2) Ραβδοδίσκος(Στερεό σύμπλεγματριών δίσκων αρθρωτά
(β3) Πλαίσιο
συνδεδεμένων
(Στερεό σύμπλεγματριών δοκών μονολιθικά
Y
Z
XΓραμμικοί φορείς
(γ1) Ραβδοτετράπλευρο(χαλαρός σχηματισμός)
(γ2) Αρθρωτάσυνδεδεμένες δοκοί(χαλαρός σχηματισμός)
μεταξύ τους)συνδεδεμένωνμεταξύ τους)
συνδεδεμένων μεταξύ τους Σχ. 3.2.4-1 Απλά παραδείγματα επιφανειακών (α) και γραμμικών (β) στερεών δίσκων καθώς
και μη στερεών σχηματισμών (γ)
3-22
Σ T
A Τ
Ι Κ Η
Ι

ΣΤΑΤΙΚΗ ΤΩΝ ΚΑΤΑΣΚΕΥΩΝ - Τόμος Ι - Θεμελιώδεις αρχές και ισοστατικοί φορείς
Σε όλες τις προαναφερθείσες περιπτώσεις η στήριξη του επίπεδου φορέα εντός του επιπέδου του υπακούει στους ίδιους κανόνες και γι' αυτό χαρακτηρίζουμε γενικά τον φορέα ως δίσκο και μιλάμε για το πρόβλημα στήριξης ενός δίσκου εντός του επιπέδου του, αδιαφορώντας για το αν πρόκειται για επιφανειακό φορέα, για μία μεμονωμένη δοκό ή για έναν σύνθετο γραμμικό φορέα, αδιαφορώντας δηλαδή για τη γεωμετρική του μορφή και την εσωτερική του δομή. Αντίθετα, ο σχηματισμός των τεσσάρων αρθρωτά συνδεδεμένων ράβδων του σχήματος 3.2.4-1(γ1) είναι φανερό ότι δεν αποτελεί στερεό δίσκο, αφού η μορφή του μπορεί να αλλάξει ακόμη κι αν τα τέσσερα στοιχεία του θεωρηθούν απαραμόρφωτα. Το ίδιο ισχύει προφανέστατα και για τον σχηματισμό που αποτελείται από δύο αρθρωτά συνδεδεμένες δοκούς (Σχ. 3.2.4-1(γ2)). Το πρόβλημα της ευσταθούς στήριξης σύνθετων επίπεδων γραμμικών φορέων με εσωτερική δομή που δεν εξασφαλίζει το απαραμόρφωτο του φορέα υπό την παραδοχή απαραμόρφωτων δομικών στοιχείων, δηλαδή φορέων που δεν αποτελούν δίσκους υπό την προαναφερθείσα έννοια, θα εξεταστεί στο κεφάλαιο 5.
Για την εικονογράφηση των συλλογισμών της παρούσας υποπαραγράφου θα χρησιμοποιήσουμε ως δίσκο μία απολύτως στερεή επίπεδη δοκό.
Α2. Οι βαθμοί ελευθερίας του δίσκου Ας θεωρήσουμε λοιπόν μία δοκό 1-2 σε τυχαία θέση στο επίπεδο Χ-Ζ (Σχ. 3.2.4-2), η οποία δεν στηρίζεται πουθενά, είναι δηλαδή ελεύθερη να μετακινηθεί εντός επιπέδου από την αρχική της θέση 1-2 σε μία άλλη θέση 1'-2'. Κατά τη μετακίνηση αυτή το μήκος της δοκού παραμένει εξ ορισμού αναλλοίωτο, ενώ τα δύο άκρα της εκτελούν τις μετατοπίσεις 1-1' και 2-2' αντιστοίχως. Όπως βλέπουμε άνω αριστερά στο σχήμα 3.2.4-2, η μετακίνησή αυτή δεν είναι παρά μία στροφή περί ένα σταθερό σημείο Ω, το οποίο ονομάζουμε απόλυτο πόλο στροφής. Η θέση του απόλυτου πόλου στροφής Ω προσδιορίζεται εύκολα από τη γεωμετρία της μετακίνησης: Είναι το σημείο στο οποίο τέμνονται οι δύο κάθετες ευθείες (βλ. κόκκινες διακεκομμένες γραμμές στο σχήμα 3.2.4-2) που φέρουμε στο μέσο των ευθύγραμμων διανυσμάτων μετατόπισης 1-1' και 2-2' των άκρων της δοκού. Εύκολα αποδεικνύεται (ο απλός γεωμετρικός συλλογισμός επαφίεται στον αναγνώστη), ότι οι απόλυτες γωνίες στροφής ω1=[1-Ω-1'] και ω2=[2-Ω-2'] των σημείων 1 και 2 είναι ίσες: ω1=ω2=ω. Οι ευθείες Ω-1 και Ω-2 ονομάζονται πολικές ακτίνες των σημείων 1 και 2 αντιστοίχως.
Περαιτέρω, παρατηρούμε (βλ. Σχ. 3.2.4-2 άνω δεξιά) ότι η περιγραφείσα μετακίνηση της απολύτως στερεής δοκού από την αρχική θέση 1-2 στην τελική θέση 1'-2' μπορεί να αναλυθεί σε μία παράλληλη μετάθεση από την αρχική θέση 1-2 στη θέση 1*-2* (όπου το σημείο 1* ταυτίζεται με το σημείο 1') και σε μία στροφή ω ως προς το σημείο 1*=1', το οποίο γι’ αυτό χαρακτηρίζεται ως σχετικός πόλος στροφής. Τέλος, η συνολική παράλληλη μετάθεση από την θέση 1-2 στην θέση 1*-2* μπορεί να αναλυθεί σε δύο παράλληλες μεταθέσεις κατά τις διευθύνσεις των αξόνων Χ και Ζ (Σχ. 3.2.4-2 κάτω).
3-23
Σ T
A Τ
Ι Κ Η
Ι

Κεφάλαιο 3. Θεμελιώδεις αρχές της Στατικής των γραμμικών φορέων
∏
∏
1
2
1'
2'
Ω∏
=
ω1
ω2ω =ω =ω1 2
∏
∏
1
2
2*
1*=1'
+1*=1'
2*
2'
ω
τόξο 2*-2' = χορδή 2*-2'
=
1
1*=1'2
2*
1**
2**uX2
X1uZ1u
Z2u
XZ
Σχ. 3.2.4-2 Μετακινήσεις απολύτως στερεής δοκού στο επίπεδο Χ-Ζ
Από τα παραπάνω συνάγεται ότι η συνολική μετακίνηση μιας ελεύθερης (αδέσμευτης, αστήρικτης) και απολύτως στερεής (απαραμόρφωτης) επίπεδης δοκού καθορίζεται από τρεις ανεξάρτητες μετακινήσεις: δύο παράλληλες μεταθέσεις κατά Χ και Ζ, και μία στροφή ως προς τον κάθετο στο επίπεδο Χ-Ζ άξονα Υ. Οι τρεις αυτές ανεξάρτητες δυνατότητες μετακίνησης αποτελούν τους τρεις βαθμούς ελευθερίας της ελεύθερης δοκού στο επίπεδο Χ-Ζ. Οι βαθμοί ελευθερίας ονομάζονται και ελευθερίες κίνησης.
Α3. Η παραδοχή των απειροστών μετακινήσεων Οι παραπάνω γεωμετρικές παρατηρήσεις είναι ανεξάρτητες του μεγέθους των μετακινήσεων. Στους δομικούς όμως φορείς, για γενικότερους λόγους λειτουργικότητας των κατασκευών, οι μετακινήσεις είναι κατά κανόνα περιορισμένου μεγέθους. Στις περισσότερες μάλιστα περιπτώσεις της πράξης δεχόμαστε ότι οι μετακινήσεις (μετατοπίσεις και στροφές) είναι απειροστές, δηλαδή πάρα πολύ μικρές σε σύγκριση με τις διαστάσεις των δομικών στοιχείων (παραδοχή απειροστών μετακινήσεων). Αυτό σημαίνει ότι η καμπύλη (τόξο κύκλου με κέντρο τον πόλο Ω) που διαγράφει το σημείο 1 ή 2 ή οποιοδήποτε άλλο σημείο της δοκού κατά την απειροστή μετακίνησή της θεωρείται ότι ταυτίζεται με τη χορδή του τόξου αυτού, δηλαδή οι αποστάσεις 1’-1’’ και 2’-2’’ θεωρούνται αμελητέες (βλ. Σχ. 3.2.4-3). Επίσης, επειδή για απειροστές γωνίες ισχύει tanω≈ω, η μετατόπιση u1=[1-1'] του σημείου 1 θεωρείται κάθετη επάνω στην πολική ακτίνα r1=[Ω-1] και ίση με u1=r1·ω1.
3-24
Σ T
A Τ
Ι Κ Η
Ι

ΣΤΑΤΙΚΗ ΤΩΝ ΚΑΤΑΣΚΕΥΩΝ - Τόμος Ι - Θεμελιώδεις αρχές και ισοστατικοί φορείς
1∏
1'
2'
2
Ω∏
1''
2''∏
∏
εφαπτομένη στο σημείο 1
2u
1u
τόξο κύκλου
απειροστές μετακινήσεις ›u =r ∏ωαπόσταση 1'-1'' αμελητέααπόσταση 2'-2'' αμελητέα
ω1
r1
1
1 1
1 1
ºtanω ω
Σχ. 3.2.4-3 Παραδοχή απειροστών μετακινήσεων
Σημείωση: Αν και αυτονόητο, επισημαίνεται στο σημείο αυτό ότι η παραδοχή των απειροστών μετακινήσεων δεν σημαίνει ούτε ότι οι μετακινήσεις μπορούν να αγνοηθούν παντελώς ούτε, πολύ περισσότερο, ότι αυτές είναι μηδενικές. Η παραδοχή των απειροστών μετακινήσεων αφορά στις γεωμετρικές συνθήκες ή συνθήκες συμβιβαστού της Στατικής (βλ. παράγρ. 3.1.5) και, όπως θα δούμε πιο κάτω, αποτελεί μία από τις βασικές παραδοχές της Γραμμικής Στατικής (βλ. παράγρ. 3.1.3).
Μετά από τις εισαγωγικές αυτές παρατηρήσεις, επανερχόμαστε στο πρώτο μας ερώτημα: Με ποιους τρόπους επιτυγχάνεται η κινηματικά ευσταθής (στερεή) στήριξη της απολύτως στερεής επίπεδης δοκού στο στερεό υπόβαθρο, έτσι ώστε αυτή να μην υπόκειται σε ανεπιθύμητες μετακινήσεις;
Α4. Στήριξη με μία δρομική δεσμική ράβδο Στην παράγραφο 2.4.2 παρουσιάσθηκαν διάφοροι τύποι στηρίξεων πραγματικών φορέων. Για την προσομοίωση των πραγματικών αυτών στηρίξεων χρησιμοποιούμε συμβολικά δεσμικές ράβδους (δρομικές και στροφικές) που ονομάζονται και σύνδεσμοι. Μία δρομική δεσμική ράβδος είναι ένα απολύτως στερεό (μη παραμορφώσιμο) ευθύγραμμο γραμμικό στοιχείο που συνδέει αρθρωτά ένα σημείο Α του φορέα, εδώ της απολύτως στερεής δοκού, με ένα σημείο Α* του στερεού υποβάθρου (Σχ. 3.2.4-4(α)). Λόγω της αρθρωτής σύνδεσης στο σημείο Α της δοκού, η δεσμική ράβδος επιτρέπει την περιστροφή της δοκού με σχετικό πόλο το σημείο Α. Επίσης, λόγω της αρθρωτής της σύνδεσης στο σημείο Α* του υποβάθρου, η δεσμική ράβδος μπορεί να περιστρέφεται με απόλυτο πόλο το Α* και επομένως επιτρέπει στο σημείο Α της δοκού να μετακινείται κάθετα (Σημ.: Ισχύει η παραδοχή απειροστών μετακινήσεων!) προς τον άξονά της Α-Α*. Αντίθετα, η εξ ορισμού απαραμόρφωτη δεσμική ράβδος απαγορεύει τη μετατόπιση του σημείου Α του φορέα κατά τη
3-25
Σ T
A Τ
Ι Κ Η
Ι

Κεφάλαιο 3. Θεμελιώδεις αρχές της Στατικής των γραμμικών φορέων
διεύθυνση Α-Α* του άξονά της. Έτσι, μετά τη σύνδεση της απολύτως στερεής δοκού με το στερεό υπόβαθρο μέσω μιας δεσμικής ράβδου, η δοκός χάνει έναν βαθμό ελευθερίας (μία ελευθερία κίνησης / μετατόπιση). Σημειώνεται ότι το μήκος μιας δρομικής δεσμικής ράβδου είναι πρακτικά αδιάφορο, διότι δεν υπεισέρχεται πουθενά στους συλλογισμούς μας. Βοηθάει συχνά να το θεωρούμε ίσο με την μονάδα μήκους, χωρίς όμως αυτό να είναι απαραίτητο, ενώ μπορούμε να το θεωρήσουμε και μηδενικό. Η στήριξη μέσω μιας δεσμικής ράβδου ονομάζεται απλή στήριξη ή κινητή στήριξη ή κινητή άρθρωση. Επειδή η κινητή άρθρωση δεσμεύει έναν βαθμό ελευθερίας χαρακτηρίζεται ως μονοσθενής στήριξη.
εφαπτομένη
κύκλουτόξο
A*
A
δοκός
A*
A*A A= =A
άρθρωση
=
(β1) (β2) (β3) (β4)
(α) (β)
A
στερεόυπόβαθρο
στερεήαπολύτως
απλή στήριξη = κινητή στήριξη= κινητή άρθρωση
εναλλακτικοί συμβολισμοί μίαςκινητής άρθρωσης
Σχ. 3.2.4-4 Σύνδεση της δοκού με το υπόβαθρο μέσω μιας δρομικής δεσμικής ράβδου
Στο σχήμα 3.2.4-4(β) δίνονται διάφορες εναλλακτικές συμβολικές απεικονίσεις της κινητής άρθρωσης που χρησιμοποιούμε στα στατικά σχέδια και σκαριφήματα. Σημειώνεται ότι στην περίπτωση των συμβολισμών (β2) και (β3), που έχουν σχηματικά τη μορφή κινητού εφεδράνου, ο άξονας της δρομικής δεσμικής ράβδου είναι κάθετος στη διεύθυνση της μετατόπισης (κύλισης) που επιτρέπει το εφέδρανο. Η απλούστερη συμβολική απεικόνιση μιας δεσμικής ράβδου που αρθρώνεται σε ένα σημείο Α ενός φορέα είναι η (β4), δηλαδή μία απλή γραμμή στο σημείο αυτό με διεύθυνση ίδια με τη διεύθυνση του άξονα της δεσμικής ράβδου. Στα σχήματα της παραγράφου 2.4.2-Γ δόθηκαν μερικά παραδείγματα κινητών αρθρώσεων σε πραγματικές κατασκευές.
Α5. Στήριξη με δύο δρομικές δεσμικές ράβδους Για να απαγορεύσουμε μία ακόμη ελευθερία κίνησης της απολύτως στερεής δοκού πρέπει προφανώς να τη συνδέσουμε με το στερεό υπόβαθρο μέσω μίας ακόμη δρομικής δεσμικής ράβδου, έστω της Β-Β* (Σχ. 3.2.4-5(α)). Το σημείο τομής των αξόνων των δύο δεσμικών ράβδων καθίσταται έτσι ο απόλυτος πόλος περιστροφής Ω της δοκού, η οποία διατηρεί πλέον έναν μόνο βαθμό ελευθερίας, δηλαδή την περιστροφή περί τον πόλο Ω ("φανταστική" άρθρωση). Μια τέτοια στήριξη ονομάζεται διπλή στήριξη της δοκού. Σε περίπτωση που οι δύο δρομικές δεσμικές
3-26
Σ T
A Τ
Ι Κ Η
Ι

ΣΤΑΤΙΚΗ ΤΩΝ ΚΑΤΑΣΚΕΥΩΝ - Τόμος Ι - Θεμελιώδεις αρχές και ισοστατικοί φορείς
ράβδοι αρθρώνονται στο ίδιο σημείο Α της δοκού (Σχ. 3.2.4-5(β)), το σημείο Α ακινητοποιείται και η στήριξη ονομάζεται σταθερή στήριξη του σημείου Α ή σταθερή άρθρωση. Επειδή η σταθερή άρθρωση δεσμεύει δύο βαθμούς ελευθερίας χαρακτηρίζεται ως δισθενής στήριξη. Τέλος, στην ειδική περίπτωση που οι δύο δρομικές δεσμικές ράβδοι είναι παράλληλες, ο απόλυτος πόλος στροφής βρίσκεται στο άπειρο και η δοκός διατηρεί την δυνατότητα της παράλληλης μετάθεσης κάθετα στους άξονες των δεσμικών ράβδων (Σχ.3.2.4-5(γ)). Η ειδική αυτή στήριξη ονομάζεται μονοκινητή ή απλώς κινητή πάκτωση.
A
A*Β*
Β
Ω∏
("φανταστική"άρθρωση)
(α) διπλή στήριξη δοκού (β) σταθερή άρθρωση
Β*A*
A=Β=Ω∏
∏A
Β
(γ) μονοκίνητη ή κινητήπάκτωση
(δ) συμβολικές απεικονίσεις σταθερής άρθρωσης
A
=
A A A
= =(δ1) (δ2) (δ3) (δ4)
Σχ. 3.2.4-5 Σύνδεση της δοκού με το υπόβαθρο μέσω δύο δρομικών δεσμικών ράβδων
Στο σχήμα 3.2.4-5(δ) δίνονται διάφορες εναλλακτικές συμβολικές απεικονίσεις της σταθερής άρθρωσης που χρησιμοποιούμε στα στατικά σχέδια και σκαριφήματα. Σημειώνεται ότι στην περίπτωση των συμβολισμών (δ2) και (δ3), που έχουν σχηματικά τη μορφή ενός σταθερού εφεδράνου, οι δύο δρομικές δεσμικές ράβδοι που του αντιστοιχούν μπορούν να έχουν οποιονδήποτε προσανατολισμό, αρκεί αυτές να μην είναι συνευθειακές. Η απλούστερη συμβολική απεικόνιση της σταθερής στήριξης ενός σημείου Α ενός φορέα είναι δύο απλές γραμμές στο σημείο αυτό με διευθύνσεις παράλληλες με εκείνες των δύο αντίστοιχων δεσμικών ράβδων. Στα σχήματα της παραγράφου 2.4.2-Γ δόθηκαν μερικά παραδείγματα σταθερών αρθρώσεων σε πραγματικές κατασκευές.
Α6. Στήριξη με τρεις δρομικές δεσμικές ράβδους Τέλος, τοποθετώντας μία τρίτη δρομική δεσμική ράβδο Γ-Γ* (Σχ. 3.2.4-6(α) και (α')) αίρουμε και τον τρίτο βαθμό ελευθερίας της απολύτως στερεής επίπεδης δοκού, διότι ακινητοποιούνται τα τρία σημεία τομής των δεσμικών ράβδων. Αν όμως η τρίτη δεσμική ράβδος διέρχεται από το σημείο τομής των δύο άλλων, τότε
3-27
Σ T
A Τ
Ι Κ Η
Ι

Κεφάλαιο 3. Θεμελιώδεις αρχές της Στατικής των γραμμικών φορέων
διατηρείται η δυνατότητα απειροστής περιστροφής της δοκού περί το κοινό σημείο Ω (Σχ. 3.2.4-6(β) και (β')) και η στήριξη χαρακτηρίζεται ως χαλαρή. Παρόμοια χαλαρότητα στήριξης εμφανίζεται και στην περίπτωση που και οι τρεις δρομικές δεσμικές ράβδοι είναι παράλληλες μεταξύ τους, οπότε ο πόλος περιστροφής μετατίθεται στο άπειρο και η δοκός διατηρεί τη δυνατότητα απειροστής παράλληλης μετάθεσης κάθετα στη διεύθυνση των ράβδων (Σχ. 3.2.4-6(γ) και (γ')). Αν μάλιστα οι ράβδοι θεωρηθούν ως ισομήκεις, η παράλληλη μετάθεση είναι πεπερασμένου μεγέθους. Τέτοιου είδους χαλαρές στηρίξεις λόγω παράλληλων ή συντρεχουσών σε ένα σημείο δρομικών δεσμικών ράβδων είναι ανεπιθύμητες σε πραγματικούς φορείς και πρέπει να αποκλειστούν.
(α)
A* Β*
∏
A Β
Ω∏
(β) (γ)
∏
∏
Χαλαρές στηρίξειςΣτερεή στήριξη
Γ
Γ*
∏Ω
(γ')(β')(α') Σχ. 3.2.4-6 Σύνδεση της δοκού με το υπόβαθρο μέσω τριών δρομικών δεσμικών ράβδων
Εάν οι τρεις δρομικές δεσμικές ράβδοι της στερεάς στήριξης του σχήματος 3.2.4-6(α) τοποθετηθούν πολύ κοντά η μία στην άλλη σε μία πολύ μικρή περιοχή της δοκού, η στήριξη χαρακτηρίζεται ως σταθερή ή πλήρης πάκτωση ή απλώς πάκτωση (Σχ. 3.2.4-8(α)). Επειδή η πάκτωση δεσμεύει τρεις βαθμούς ελευθερίας χαρακτηρίζεται ως τρισθενής στήριξη. Εξιδανικεύοντας οριακά την περίπτωση αυτή, μπορούμε να θεωρήσουμε την περιοχή πάκτωσης πρακτικώς ως ένα σημείο Π, οπότε μιλούμε για πάκτωση στο σημείο Π. Με την πάκτωση ενός σημείου της δοκού όχι μόνον ακινητοποιείται το σημείο αυτό, αλλά εμποδίζεται και η δυνατότητα περιστροφής του. Επομένως, λόγω του ότι η δοκός είναι απολύτως στερεή, αίρονται και οι τρεις βαθμοί ελευθερίας που διαθέτει η δοκός στο επίπεδο. Η πάκτωση συμβολίζεται συνήθως με μία γραμμή κάθετη στον άξονα της δοκού στο σημείο (συνήθως άκρο) που πακτώνεται (Σχ. 3.2.4-8(β)).
3-28
Σ T
A Τ
Ι Κ Η
Ι

ΣΤΑΤΙΚΗ ΤΩΝ ΚΑΤΑΣΚΕΥΩΝ - Τόμος Ι - Θεμελιώδεις αρχές και ισοστατικοί φορείς
Α7. Στήριξη με ράβδους πεπερασμένου μήκους Όπως σημειώθηκε πιο επάνω, το μήκος μιας δρομικής δεσμικής ράβδου νοείται θεωρητικά μηδενικό. Εντούτοις, τίποτε δεν αλλάζει στις συνθήκες στήριξης μιας δοκού (ή γενικότερα ενός φορέα), αν στη θέση των (μηδενικού μήκους) δρομικών δεσμικών ράβδων τοποθετηθούν πεπερασμένου μήκους ράβδοι (Σχ. 3.2.4-7).
Διέρειστη δοκός
Συμβολισμός στηρίξεων με τη μορφή εφεδράνων
Τριέρειστη δοκός
≈0
Ισοδύναμος συμβολισμός στηρίξεων με δρομικές δεσμικές ράβδους (μηδενικού μήκους)
Ισοδύναμος συμβολισμός στηρίξεων με ράβδους πεπερασμένου μήκους
L=πεπερ.
Σχ. 3.2.4-7 Ισοδύναμη στήριξη δοκού με ράβδους πεπερασμένου μήκους
Α8. Χρησιμοποίηση στροφικών δεσμικών ράβδων Αντί των τριών μη συντρεχουσών ράβδων σε πολύ μικρή απόσταση, μπορούμε να συμβολίσουμε την πάκτωση με δύο δεσμικές ράβδους που παγιώνουν (ακινητοποιούν) το σημείο στήριξης και με μία στροφική δεσμική ράβδο, που εμποδίζει την περιστροφή (Σχ. 3.2.4-8(γ)). Η στροφική δεσμική ράβδος είναι δηλαδή ένας σύνδεσμος που απαγορεύει τη στροφή ενός σημείου Α του φορέα περί έναν άξονα, δεσμεύοντας έτσι έναν βαθμό ελευθερίας (μία ελευθερία κίνησης, στροφή) του σημείου Α. Η στροφική δεσμική ράβδος συμβολίζεται με μία διακεκομμένη γραμμή η οποία συνδέει το στηριζόμενο (έναντι στροφής) σημείο Α του φορέα με το στερεό υπόβαθρο. Το τελευταίο χαρακτηρίζεται με έναν μικρό σταυρό. Η διακεκομμένη γραμμή έχει διεύθυνση παράλληλη προς τον άξονα περί τον οποίο αποκλείεται η στροφή. Στο σχήμα 3.2.4-8(γ) η στροφική δεσμική ράβδος είναι παράλληλη προς τον καθολικό άξονα Υ, δηλαδή κάθετη στο επίπεδο Χ-Ζ του φορέα, υποδηλώνοντας έτσι ότι δεσμεύεται η στροφή ως προς τον άξονα Υ. Μια απλουστευμένη συμβολική απεικόνιση της πάκτωσης φαίνεται στο σχήμα 3.2.4-8 (δ), όπου οι δύο δρομικές δεσμικές ράβδοι παριστάνονται με δύο απλές γραμμές και η στροφική δεσμική ράβδος με μία απλή διακεκομμένη γραμμή παράλληλη προς τον άξονα Υ. Εναλλακτικά, αντί της διακεκομμένης γραμμής (η οποία υποτίθεται ότι είναι κάθετη στο επίπεδο Χ-Ζ), μπορεί να χρησιμοποιηθεί ένα μικρό τετραγωνάκι, το οποίο
3-29
Σ T
A Τ
Ι Κ Η
Ι

Κεφάλαιο 3. Θεμελιώδεις αρχές της Στατικής των γραμμικών φορέων
συμβολίζει έναν ενδοεπίπεδο μηχανισμό παρεμπόδισης της στροφής του στηριζόμενου σημείου Α (Σχ. 3.2.4-8(ε)). Η πάκτωση αποτελεί έτσι μία τριπλή στήριξη αποτελούμενη από μία στροφική και δύο δρομικές δεσμικές ράβδους. Τέλος σημειώνεται ότι για το μήκος μιας στροφικής δεσμικής ράβδου ισχύουν όσα αναφέρθηκαν για το μήκος μιας δρομικής δεσμικής ράβδου.
=
Z
XY
Πρόβολος
==A
=
απλουστευμένος συμβολισμός
(α) (β) (γ) (δ) (ε) Σχ. 3.2.4-8 Σταθερή ή πλήρης πάκτωση (ή απλώς πάκτωση) και οι συμβολισμοί της
Στα σχήματα της παραγράφου 2.4.2-Γ δόθηκαν μερικά παραδείγματα πακτώσεων σε πραγματικές κατασκευές. Ειδικές περιπτώσεις πάκτωσης είναι οι εξής: (α) Η μονοκινητή ή απλώς κινητή πάκτωση (βλ. Σχ. 3.2.4-9(γ)) που αναφέρθηκε
ήδη πιο επάνω και προκύπτει είτε με τοποθέτηση δύο παράλληλων δεσμικών ράβδων σε πολύ μικρή απόσταση είτε με κατάργηση μιας από τις δύο δρομικές δεσμικές ράβδους μιας σταθερής πάκτωσης (Σχ. 3.2.4-8(γ)). Σε εξάρτηση από τον προσανατολισμό των δύο παράλληλων δεσμικών ράβδων η πάκτωση μπορεί να έχει κινητότητα κάθετη στον άξονα της δοκού (α1), παράλληλη στον άξονα της δοκού (α2) ή και υπό γωνία ως προς τον άξονα της δοκού.
(γ1)(α1)
A
(β1)
=
XY Z
= = =
απλουστευμένος συμβολισμός
(ε1)(δ1)
= = = =A
(ε2)
απλουστευμένος συμβολισμός
(α2) (β2) (γ2) (δ2) Σχ. 3.2.4-9 Μονοκινητές (ή απλώς κινητές) πακτώσεις και οι συμβολισμοί τους
3-30
Σ T
A Τ
Ι Κ Η
Ι

ΣΤΑΤΙΚΗ ΤΩΝ ΚΑΤΑΣΚΕΥΩΝ - Τόμος Ι - Θεμελιώδεις αρχές και ισοστατικοί φορείς
(β) Η δικινητή πάκτωση (Σχ. 3.2.4-10), η οποία προκύπτει με την κατάργηση και των δύο δρομικών δεσμικών ράβδων μιας σταθερής πάκτωσης. Η δικινητή πάκτωση επιτρέπει την παράλληλη μετάθεση κατά την έννοια των δύο αξόνων Χ και Ζ, απαγορεύοντας μόνον την στροφή περί τον άξονα Υ. Αν θέλουμε να την παραστήσουμε μέσω ενός μηχανισμού, χρησιμοποιούμε δύο μονοκινητές πακτώσεις 'εν σειρά', όπως φαίνεται στο σχήμα 3.2.4-10(α).
A= = =
απλουστευμένος συμβολισμός
(γ)(α) (β) (δ) Σχ. 3.2.4-10 Δικινητή πάκτωση και οι συμβολισμοί της
Οι μονοκινητές και δικινητές πακτώσεις συναντώνται στην πράξη σε σχετικά λίγες περιπτώσεις ειδικών διαμορφώσεων των σημείων στήριξης. Όταν μία στροφική δεσμική ράβδος τοποθετηθεί παράλληλα με τον άξονα μιας δοκού, τότε αποκλείει την στρέψη του σημείου εφαρμογής της και συνεπώς συνιστά μια στρεπτική πάκτωση. Στρεπτικές πακτώσεις αφορούν σε φορείς του χώρου (βλ. ακόλουθη υποπαράγραφο).
Α9. Περαιτέρω διευκρίνιση της έννοιας του δίσκου Στις παραπάνω αναπτύξεις χρησιμοποιήσαμε ως αντιπροσωπευτικό παράδειγμα δίσκου μία ευθύγραμμη δοκό. Είναι σαφές ότι στη θέση της δοκού θα μπορούσε να είχε χρησιμοποιηθεί οποιοσδήποτε άλλος δίσκος οιασδήποτε γεωμετρικής μορφής. Ενδεικτικά παρουσιάζονται στο σχήμα 3.2.4-11 μερικά απλά παραδείγματα φορέων της δομικής πράξης που συνιστούν δίσκους, αφού τα γραμμικά (ευθύγραμμα ή/και καμπύλα) στοιχεία από τα οποία αποτελούνται συνδέονται μεταξύ τους μονολιθικά (στερεά). Υπενθυμίζεται εδώ ο ορισμός του δίσκου (βλ. αρχή της παρούσας παραγράφου 3.2.4-Α):
Ένας φορέας θεωρείται ως δίσκος, αν η θεώρηση όλων των δομικών στοιχείων του ως απαραμόρφωτων (απολύτως στερεών) συνεπάγεται ότι και ο φορέας στο σύνολό του είναι απαραμόρφωτος (απολύτως στερεός).
Αν π.χ. ο φορέας αποτελείται από ένα μόνο δομικό στοιχείο τότε αυτονόητα συνιστά δίσκο. Το ίδιο συμβαίνει και όταν ο φορέας αποτελείται από περισσότερα δομικά στοιχεία, τα οποία όμως όλα συνδέονται μεταξύ τους μονολιθικά (στερεά, χωρίς αρθρώσεις), όπως π.χ. το κλειστό πλαίσιο (βλ. Σχ. 3.2.4-11). Σε περίπτωση σύνθετου φορέα με αρθρωτές συνδέσεις διαφόρων τύπων η διαπίστωση του αν είναι δίσκος ή όχι καθίσταται δυσκολότερη και θα μας απασχολήσει αργότερα. Εντούτοις, ένα διαισθητικά απλό, αλλά χαρακτηριστικό και συχνά απαντώμενο παράδειγμα είναι ο γνωστός μας τριγωνικός ραβδοδίσκος, αποτελούμενος από τρεις ράβδους συνδεδεμένες μεταξύ τους με καμπτικές αρθρώσεις (βλ. Σχ. 2.5.1-8(α) και Σχ. 3.2.4-1(β2)).
3-31
Σ T
A Τ
Ι Κ Η
Ι

Κεφάλαιο 3. Θεμελιώδεις αρχές της Στατικής των γραμμικών φορέων
Σύμφωνα με τον ορισμό του, ένας δίσκος, θεωρούμενος ως ελεύθερο σώμα αποσπασμένο από κάθε στήριξη, είναι πάντα ένας μη χαλαρός σχηματισμός δομικών στοιχείων. Γι΄αυτό ένας δίσκος χαρακτηρίζεται ως εσωτερικά στερεός ή εσωτερικά κινηματικά ευσταθής (Σημ.: Όπως θα δούμε στην παράγραφο 3.2.6, ένας δίσκος μπορεί να είναι στατικά αόριστος (υπερστατικός), όπως π.χ. το προαναφερθέν κλειστό πλαίσιο, ή εσωτερικά στατικά ορισμένος (ισοστατικός), όπως π.χ. ο τριγωνικός ραβδοδίσκος). Αντίθετο παράδειγμα αποτελεί ο επίσης γνωστός μας σχηματισμός τεσσάρων αρθρωτά συνδεδεμένων μεταξύ τους γραμμικών στοιχείων στο επίπεδο (βλ. Σχ. 2.5.1-8(β) και Σχ. 3.2.4-1(γ1)), ο οποίος μπορεί να αλλάξει μορφή ακόμη κι αν τα γραμμικά στοιχεία που τον συνθέτουν θεωρηθούν απαραμόρφωτα. Ένας τέτοιος σχηματισμός, θεωρούμενος ως ελεύθερο σώμα ανεξάρτητα από κάθε στήριξη, χαρακτηρίζεται ως εσωτερικά χαλαρός ή εσωτερικά κινηματικά ασταθής ή εσωτερικά κινηματικός.
αμφιέρειστη δοκός
∏ ∏
ημιπλαίσιο
αμφιέρειστο τόξο πρόβολος
αμφιέρειστο δίστυλοπλαίσιο
τοξωτόπλαίσιο
αμφιέρειστοκλειστό πλαίσιο
(εσωτερικά υπερστατικόςδίσκος)
∏
αμφιέρειστες δοκοί/πλαίσια με τεθλασμένη γεωμετρία
τριαρθρωτοί ραβδοδίσκοι Σχ. 3.2.4-11 Γραμμικοί φορείς - Δίσκοι με στερεή και κινηματικά ορισμένη στήριξη
3-32
Σ T
A Τ
Ι Κ Η
Ι

ΣΤΑΤΙΚΗ ΤΩΝ ΚΑΤΑΣΚΕΥΩΝ - Τόμος Ι - Θεμελιώδεις αρχές και ισοστατικοί φορείς
Α10. Σύνοψη της παραγράφου 3.2.4-Α Συνοψίζοντας τα παραπάνω, διατυπώνουμε ακολούθως τους βασικούς κανόνες που αφορούν στον έλεγχο της κινηματικής ευστάθειας ή στερεότητας στήριξης μιας απολύτως στερεής επίπεδης δοκού και, γενικότερα, ενός απολύτως στερεού δίσκου στο επίπεδο:
(1) Κάθε δρομική ή στροφική δεσμική ράβδος απαγορεύει μία ελευθερία κίνησης (έναν βαθμό ελευθερίας, μεταφορικό ή στροφικό αντιστοίχως).
(2) Ο απολύτως στερεός δίσκος χάνει τους τρεις βαθμούς ελευθερίας του και ακινητοποιείται αν συνδεθεί με το στερεό υπόβαθρο
είτε (α) μέσω τριών μη συνευθειακών, μη παράλληλων και μη συντρεχουσών δρομικών δεσμικών ράβδων
είτε (β) μέσω δύο μη παράλληλων δρομικών ράβδων και μίας στροφικής δεσμικής ράβδου.
Στις περιπτώσεις αυτές η στήριξη είναι στερεή ή κινηματικά ευσταθής και χαρακτηρίζεται ως κινηματικά ορισμένη.
(3) Αν ο αριθμός των δεσμικών ράβδων είναι μεγαλύτερος των τριών που εξασφαλίζουν τη στερεή στήριξη, τότε η στερεή αυτή στήριξη χαρακτηρίζεται ως κινηματικά υπερορισμένη.
(4) Αν οι δεσμικές ράβδοι είναι όλες δρομικές και είναι
είτε (α) λιγότερες από τρεις
είτε (β) τρεις ή περισσότερες, αλλά είτε παράλληλες μεταξύ τους είτε συντρέχουσες σε ένα σημείο,
τότε η στήριξη είναι χαλαρή ή κινηματικά ασταθής και χαρακτηρίζεται ως κινηματικά υποορισμένη.
3-33
Σ T
A Τ
Ι Κ Η
Ι

Κεφάλαιο 3. Θεμελιώδεις αρχές της Στατικής των γραμμικών φορέων
………………………….. ……………………………………..
(Οι σελίδες 3-34 έως 3-52 παραλείπονται)
………………………….. ……………………………………..
3-34
Σ T
A Τ
Ι Κ Η
Ι

ΣΤΑΤΙΚΗ ΤΩΝ ΚΑΤΑΣΚΕΥΩΝ - Τόμος Ι - Θεμελιώδεις αρχές και ισοστατικοί φορείς
3.2.5 Τα εξωτερικά εντασιακά μεγέθη γραμμικών φορέων
Όπως ήδη γνωρίζουμε (βλ. παράγρ. 3.1.4), ως εξωτερικά εντασιακά μεγέθη χαρακτηρίζονται αφενός τα εξωτερικώς επιβαλλόμενα φορτία που ενεργούν επάνω στον δομικό φορέα και αφετέρου οι αντιδράσεις που αναπτύσσονται στις στηρίξεις εξ αιτίας της φόρτισής του (Σημ.: Στην επόμενη παράγραφο 3.2.6 θα δούμε ότι εκτός των εξωτερικών υπάρχουν και τα εσωτερικά εντασιακά μεγέθη που αναπτύσσονται μέσα στα δομικά στοιχεία ενός φορτιζόμενου φορέα). Τα φορτία θεωρούνται εξ αρχής δεδομένα και γνωστά. Αντίθετα, οι αντιδράσεις στηρίξεων, δηλαδή οι δυνάμεις και ροπές που αναπτύσσονται στους συνδέσμους (δρομικές και στροφικές δεσμικές ράβδους) που συνδέουν τον φορέα με το στερεό έδαφος (στερεό υπόβαθρο) είναι καταρχάς άγνωστες και πρέπει να υπολογιστούν με τις μεθόδους της Στατικής. Στην παράγραφο αυτή θα δούμε πώς οι γνωστές μας συνθήκες ισορροπίας μπορούν να χρησιμοποιηθούν για τον υπολογισμό των αντιδράσεων, αφού όμως προηγουμένως συγκεκριμενοποιήσουμε τα είδη των εξωτερικών φορτίων που μπορεί να δεχθεί ένας γραμμικός φορέας.
Α. Τα εξωτερικά φορτία γραμμικών φορέων
Α1. Τα είδη των φορτίων γραμμικών φορέων και συμβολισμοί τους
Τα είδη φορτίσεων δομικών φορέων παρουσιάστηκαν γενικώς στην παράγραφο 2.6, όπου και τονίσθηκε ότι οι πραγματικές εξωτερικές δυνάμεις που δρουν επάνω σε μία κατασκευή υπόκεινται σε μία σειρά εξιδανικεύσεων και απλοποιήσεων προκειμένου να καθοριστεί το φορτιστικό προσομοίωμα που θα χρησιμοποιήσουμε για τον υπολογισμό του φέροντος οργανισμού της. Έτσι, π.χ., το φορτίο ενός οχήματος επάνω σε μια γέφυρα μπορεί να αποδοθεί μέσω μίας ή περισσοτέρων συγκεντρωμένων (μοναχικών) δυνάμεων και το ίδιο βάρος των δομικών στοιχείων (χωρική/μαζική δύναμη) ή η πίεση του ανέμου (επιφανειακή δύναμη) μέσω ενός συνεχούς, γραμμικώς ή μη γραμμικώς κατανεμημένου φορτίου. Ειδικότερα όσον αφορά στους γραμμικούς φορείς, τα εξιδανικευμένα φορτία πoυ μπορούν να ασκηθούν επάνω τους είναι γενικώς τα ακόλουθα (σε αγκύλες οι μονάδες μέτρησής τους):
Συγκεντρωμένες (μοναχικές) δυνάμεις FX, FY, FZ [kN] (Αντί του συμβόλου F χρησιμοποιείται συχνά και το σύμβολo Ρ).
Συνεχή, γραμμικώς ή μη κατανεμημένα φορτία qX, qY, qZ [kN/m] (Αντί του συμβόλου q χρησιμοποιείται συχνά και το σύμβολo p).
Συγκεντρωμένες (μοναχικές) ροπές MLX, MLY, MLZ [kNm]. Συνεχείς, γραμμικώς ή μη κατανεμημένες ροπές mLX, mLY, mLZ [kNm/m].
Με τον κάτω δείκτη L επισημαίνεται ότι οι (συγκεντρωμένες ή κατανεμημένες) ροπές είναι εξωτερικές ροπές-φορτία σε αντίθεση με τις ροπές Μ (χωρίς τον δείκτη L) που προκύπτουν ως εσωτερικά μεγέθη έντασης. Όλα τα παραπάνω φορτία θεωρούνται ότι ενεργούν επάνω στον κεντροβαρικό άξονα του γραμμικού στοιχείου (Σχ. 3.2.5-1). Με τους δείκτες X, Y, Z ορίζεται η
3-53
Σ T
A Τ
Ι Κ Η
Ι

Κεφάλαιο 3. Θεμελιώδεις αρχές της Στατικής των γραμμικών φορέων
διεύθυνση δράσης των φορτίων ως παράλληλη με τον αντίστοιχο άξονα του καθολικού συστήματος αναφοράς. Ως καθολικό σύστημα αναφοράς χαρακτηρίζεται ένα τρισορθογώνιο καρτεσιανό σύστημα συντεταγμένων X-Y-Z (βλ. παράγρ. 3.1.2) σταθερού προσανατολισμού, το οποίο ορίζεται στην αρχή της επίλυσης και ισχύει για ολόκληρο τον φορέα, δηλαδή για όλα τα δομικά στοιχεία του φορέα ανεξάρτητα από τον προσανατολισμό τους. Ο χαρακτηρισμός 'καθολικό' χρησιμοποιείται σε αντιδιαστολή προς τα τοπικά συστήματα αναφοράς x-y-z, που εισάγονται για κάθε στοιχείο ξεχωριστά με τον άξονα x να συμπίπτει με τον κεντροβαρικό άξονα του εκάστοτε γραμμικού στοιχείου. Συχνά, ιδιαίτερα για τα κατανεμημένα φορτία q και mL που ασκούνται σε συγκεκριμένα στοιχεία, χρησιμοποιούνται ως δείκτες των φορτίων οι τοπικοί άξονες x, y, z των στοιχείων αυτών. Για τον φορέα του σχήματος 3.2.5-1 ο τοπικός άξονας x της φορτιζόμενης δοκού 2-3 συμπίπτει με τον καθολικό άξονα Χ, οπότε οι δείκτες Χ, Υ, Ζ θα μπορούσαν να αντικατασταθούν από τους δείκτες x, y, z. Οι δείκτες X, Y, Z ή x, y, z χρησιμοποιούνται μόνον όταν υφίσταται πιθανότητα σύγχυσης, διαφορετικά μπορούν να παραλειφθούν.
yx
z
FZ
FXFY
MLZ
MLXMLY
qZ(x)
qY(x)
qX(x)
mZ(x)
mY(x)
mX(x)
Κεντροβαρικός άξονας δοκού -2 3
3
4
yx
z
FZ
FY
qZ(x)
yx
z
τοπικόσύστημααναφοράςδοκού 2 - 3
καθολικόσύστημααναφοράς
Y ZX
• •2
1
• ••
Σχ. 3.2.5-1 Φορτία γραμμικών φορέων με συμβατικά θετικές φορές κατά την έννοια των
καθολικών αξόνων X, Y, Z
Στο ακόλουθο σχήμα 3.2.5-2 απεικονίζονται τα διάφορα πιθανά φορτία επίπεδων φορέων (εντός του επιπέδου X-Z ή x-z). Σημειώνονται επίσης τα συνήθη σύμβολα που χρησιμοποιούνται γι' αυτά, καθώς και οι μονάδες μέτρησής τους.
3-54
Σ T
A Τ
Ι Κ Η
Ι

ΣΤΑΤΙΚΗ ΤΩΝ ΚΑΤΑΣΚΕΥΩΝ - Τόμος Ι - Θεμελιώδεις αρχές και ισοστατικοί φορείς
q (x) n(x) m(x) mT(x)
Κεντροβαρικός άξονας δοκού -2 3
3
yx
z
ML
• ••
yx
z
P
H
MT2
1
H
F • ML
Συνεχή φορτία διαμήκη: px(x)= n(x) [kN/m] εγκάρσια: pz(x) = p(x) ή q(x) [kN/m] καμπτικές ροπές mLy(x) = m(x) [kNm/m] στρεπτικές ροπές: mLx(x) = mΤ(x) [kNm/m]
Συγκεντρωμένα φορτία διαμήκη: Fx = F ή P ή H [kN] εγκάρσια: Fz = F ή P ή V [kN] καμπτικές ροπές: Μy = ML [kNm] στρεπτικές ροπές: Mx = MΤ [kNm]
Σχ. 3.2.5-2 Φορτία επίπεδων γραμμικών φορέων με συμβατικά θετικές φορές κατά την έννοια των τοπικών αξόνων x, y, z. Συνήθεις συμβολισμοί και μονάδες μέτρησης
Α2. Η συμβατικά θετική φορά των εξωτερικών φορτίων Συνήθως τα φορτία θεωρούνται κατά σύμβαση ως θετικά όταν η φορά τους συμπίπτει με τη φορά των καθολικών αξόνων X, Y, Z ή των τοπικών αξόνων x, y, z του στοιχείου επάνω στο οποίο δρουν. Στα σχήματα 3.2.5-1 και 3.2.5-2 όλα τα φορτία είναι σχεδιασμένα με τη συμβατικά θετική τους φορά.
Σημείωση: Στα παραπάνω σχήματα 3.2.5-1 και 3.2.5-2 σημειώνονται με κόκκινα βελάκια οι αντιδράσεις στήριξης, στις οποίες θα αναφερθούμε στην επόμενη υποπαράγραφο Β. Όπως θα δούμε εκεί, συνήθως οι αντιδράσεις στήριξης θεωρούνται κατά σύμβαση ως θετικές όταν η φορά τους είναι αντίθετη προς τη φορά των καθολικών αξόνων X, Y, Z ή -κατά περίπτωση - των τοπικών αξόνων x, y, z του στοιχείου επάνω στο οποίο ενεργούν.
Α3. Το κεντροβαρικό φορτιστικό προσομοίωμα γραμμικών φορέων Υπενθυμίζεται στο σημείο αυτό ότι κατά τη γεωμετρική εξιδανίκευση γραμμικών φορέων ο φορέας αντιπροσωπεύεται και παριστάνεται από τους κεντροβαρικούς άξονες των στοιχείων του (βλ. παράγρ. 2.2.1). Όπως γνωρίζουμε από την Αντοχή Υλικών, ο κεντροβαρικός (ή ουδέτερος) άξονας x ενός γραμμικού στοιχείου (π.χ. μιας δοκού), δηλαδή η γραμμή που συνδέει τα κέντρα βάρους των διατομών του, είναι εν γένει διαφορετικός από τον διατμητικό άξονα, δηλαδή από τη γραμμή που συνδέει τα κέντρα διάτμησης των διατομών του. Πολύ συχνά οι δύο άξονες συμπίπτουν, όπως π.χ. στη συνήθη περίπτωση ορθογωνικών διατομών από οπλισμένο σκυρόδεμα ή μεταλλικών δοκών διπλού ταυ, ενώ, π.χ., σε δοκούς με
3-55
Σ T
A Τ
Ι Κ Η
Ι

Κεφάλαιο 3. Θεμελιώδεις αρχές της Στατικής των γραμμικών φορέων
διατομή μορφής Π τα κέντρα βάρους και διάτμησης βρίσκονται σε διαφορετικά σημεία και κατά συνέπεια οι αντίστοιχοι άξονες δεν ταυτίζονται. Στην τελευταία αυτή περίπτωση, στον μεν κεντροβαρικό άξονα x αναφέρονται τα διαμήκη φορτία (κεντρικές και έκκεντρες δυνάμεις παράλληλες με τον άξονα x, δηλαδή αξονικά φορτία και ροπές κάμψης) καθώς και τα εσωτερικά μεγέθη έντασης που προέρχονται από τις αξονικές τάσεις σx (βλ. επόμενη παράγραφο 3.2.6), ενώ στον άξονα διάτμησης αναφέρονται τα εγκάρσια φορτία (κεντρικές και έκκεντρες δυνάμεις κάθετες στον άξονα x) καθώς και τα εσωτερικά μεγέθη έντασης που προέρχονται από τις διατμητικές τάσεις της διατομής. Στο παρόν σύγγραμμα θωρούμε γενικώς ότι οι δύο άξονες (κεντροβαρικός και διατμητικός) συμπίπτουν και ότι όλα τα φορτία ενεργούν επάνω στον κεντροβαρικό άξονα του γραμμικού προσομοιώματος του φορέα. Ως απλό παράδειγμα παρουσιάζεται στο σχήμα 3.2.5-3 η αναγωγή των εξωτερικών φορτίων μιας αμφιέρειστης δοκού στον κεντροβαρικό της άξονα. Η δια-
••x
h
y
z
q1 q2
q3
(α)
••(β)
xz
•
• • •
•
•
1'
1
2'
23
3'
α
b1
b2
A
A
•
Τομή Α-Α
b2
b1
P3= q3• b2
Προσομοίωμα
P1= q1• b1
P2= q2• b1
h1
h2
xz • • •
12 3
P3
P1 P2 sinα•
(γ)P2 cosα•
P2 cosα•ML2= • h1P3
•ML3= h2 Σχ. 3.2.5-3 Σχετικά με τον καθορισμό του φορτιστικού προσομοιώματος: (α) Δοκός με διατομή και φόρτιση συμμετρικές ως προς το επίπεδο x-z (β) Θεώρηση της δοκού ως φορέα στο επίπεδο x-z (γ) Κεντροβαρικό φορτιστικό προσομοίωμα της δοκού ως γραμμικού φορέα
3-56
Σ T
A Τ
Ι Κ Η
Ι

ΣΤΑΤΙΚΗ ΤΩΝ ΚΑΤΑΣΚΕΥΩΝ - Τόμος Ι - Θεμελιώδεις αρχές και ισοστατικοί φορείς
τομή της δοκού αυτής είναι σταθερή σε όλο το μήκος, συμπαγής και συμμετρική ως προς τον άξονα z και κατά συνέπεια ο κεντροβαρικός και ο διατμητικός άξονας της δοκού συμπίπτουν. Η φόρτιση της δοκού είναι και αυτή συμμετρική ως προς το επίπεδο x-z (Σχ. 3.2.5-3(α)) και γι' αυτό τα κατανεμημένα φορτία q1, q2, q3 που ενεργούν στην άνω και κάτω παρειά της πραγματικής δοκού μπορούν να αποδοθούν ως συγκεντρωμένα φορτία P1=q1b1, P2=q2b1, P3=q3b2 μέσα στο κεντροβαρικό επίπεδο x-z, όπου b1, b2 το πλάτος του άνω και του κάτω πέλματος της δοκού αντιστοίχως (Σχ. 3.2.5-3(β)). Το τελικό φορτιστικό προσομοίωμα δίνεται στο σχήμα 3.2.5-3(γ). Σ' αυτό οι δυνάμεις P1, P2, P3 έχουν μεταφερθεί στον κεντροβαρικό άξονα x της δοκού συνοδευόμενες βέβαια από τις ροπές μετάθεσης ΜL2=P2·cosα·h1 και ΜL3=P3·h2, όπου h1, h2 οι αποστάσεις της άνω και κάτω παρειάς (ίνας) της δοκού από τον κεντροβαρικό της άξονα (σύγκρ. Σχ. 2.6.2-4). Σημειώνεται επίσης ότι τα φορτία μπορεί να είναι μόνιμα (σταθερά) ή κινητά (βλ. παράγρ. 2.6.1) και να ενεργούν είτε απευθείας (άμεσα) επάνω στη δοκό είτε έμμεσα (π.χ. με τη μεσολάβηση εγκάρσιων διαδοκίδων). Στην τελευταία αυτή περίπτωση η συνεχής φόρτιση q δρα επάνω στην κύρια δοκό μέσω των δυνάμεων έδρασης των άμεσα φορτιζόμενων αμφιέρειστων δοκίδων. Μερικά απλά παραδείγματα δίνονται στο ακόλουθο σχήμα 3.2.5-4.
• •
PML
q
(α)
(β)
Εναλλακτικοί συμβολισμοίκινητών συγκεντρωμένων φορτίων
(γ)
έμμεσα φορτιζόμενη κύρια δοκός
άμεσα φορτιζόμενες δοκίδες
q
q
εγκάρσιες διαδοκίδες μεταφοράς φορτίου q
Σχ. 3.2.5-4 Άμεση φόρτιση με μόνιμα (α) και κινητά (β) φορτία. Έμμεση φόρτιση με σταθερά
φορτία (γ).
3-57
Σ T
A Τ
Ι Κ Η
Ι

Κεφάλαιο 3. Θεμελιώδεις αρχές της Στατικής των γραμμικών φορέων
Τέλος, επισημαίνεται ότι στη Στατική όλα τα παραπάνω φορτία νοούνται ως απείρως αργά προσαγόμενα, έτσι ώστε να αποκλειστούν ταλαντώσεις του δομικού φορέα και συνεπαγόμενες αδρανειακές δυνάμεις (βλ. παράγρ. 2.6.2-Δ).
Β. Οι αντιδράσεις στήριξης
Β1. Ορισμός των δυνάμεων έδρασης και των αντιδράσεων στήριξης Όταν η στήριξη ενός δομικού φορέα γίνεται με επαρκές πλήθος κατάλληλα τοποθετημένων συνδέσμων (δρομικών και στροφικών δεσμικών ράβδων), όταν δηλαδή ο φορέας εδράζεται στερεά, τότε τα εξωτερικά φορτία που ασκούνται επάνω του δεν μπορούν να τον θέσουν σε κίνηση και ο φορέας ισορροπεί. Τα εξωτερικά φορτία μεταφέρονται στο έδαφος θεμελίωσης (στερεό υπόβαθρο) μέσω των δρομικών και στροφικών δεσμικών ράβδων στήριξης του φορέα και συνεπώς ασκούνται από τον φορέα επάνω στο έδαφος αντίστοιχες δυνάμεις και ροπές. Οι δυνάμεις/ροπές αυτές ονομάζονται εντασιακά μεγέθη έδρασης ή απλώς δυνάμεις έδρασης. Λόγω του 3ου αξιώματος του Νεύτωνα (actio=reactio), θα ασκούνται ίσα και αντίθετα εντασιακά μεγέθη από το στερεό υπόβαθρο επάνω στον φορέα. Τα εντασιακά αυτά μεγέθη ονομάζονται αντιδράσεις συνδέσμων ή αντιδράσεις στήριξης ή απλά αντιδράσεις (Σχ. 3.2.5-5). Είναι προφανές ότι οι αντιδράσεις ενεργούν επάνω στον φορέα ακριβώς κατά τις διευθύνσεις των δεσμικών ράβδων, δηλαδή κατά τις διευθύνσεις κατά τις οποίες αποκλείονται οι μετακινήσεις (μετατοπίσεις ή στροφές). Έτσι, μια μεταφορική δεσμική ράβδος συνεπάγεται ως αντίδραση μια μοναχική δύναμη στο σημείο στήριξης, η οποία εξασφαλίζει τον μηδενισμό της μετατόπισης του σημείου στήριξης κατά τη διεύθυνση της δεσμικής ράβδου (Σχ. 3.2.5-5(α1)). Αντίστοιχα, μία στροφική δεσμική ράβδος συνεπάγεται ως αντίδραση μια μοναχική ροπή πάκτωσης στο σημείο στήριξης, η οποία εμποδίζει την περιστροφή του σημείου στήριξης περί άξονα παράλληλο προς τον άξονα της στροφικής δεσμικής ράβδου (Σχ. 3.2.5-5(β1)). Παρομοίως, η αρθρωτή στήριξη με δύο μη συνευθειακές δεσμικές ράβδους συνεπάγεται ως αντίδραση μια μοναχική δύναμη στο σημείο στήριξης, η οποία βρίσκεται μέσα στο επίπεδο που σχηματίζουν οι δύο δεσμικές ράβδοι και έχει διεύθυνση που εξασφαλίζει τον μηδενισμό της μετατόπισης του σημείου μέσα στο επίπεδο αυτό (Σχ. 3.2.5-5(α2)). Η αντίδραση αυτή μπορεί βέβαια να αναλυθεί σε δύο συνιστώσες κατά τις διευθύνσεις των δύο δεσμικών ράβδων. Στην περίπτωση στήριξης ενός σημείου μέσω εφεδράνου, αντικαθιστούμε το εφέδρανο με δεσμικές ράβδους επιλέγοντας τον προσανατολισμό τους με τον προσφορότερο για τους ακόλουθους υπολογισμούς τρόπο. Έτσι, το κινητό κυλινδρικό εφέδρανο του σχήματος 3.2.5-5(α2) μπορεί να αντικατασταθεί με οποιεσδήποτε δύο δρομικές δεσμικές ράβδους μέσα στο επίπεδο Υ-Ζ, αρκεί αυτές να μην είναι συνευθειακές. Η επιλογή των διευθύνσεων των δύο αυτών ράβδων επαφίεται στη διακριτική μας ευχέρεια.
3-58
Σ T
A Τ
Ι Κ Η
Ι

ΣΤΑΤΙΚΗ ΤΩΝ ΚΑΤΑΣΚΕΥΩΝ - Τόμος Ι - Θεμελιώδεις αρχές και ισοστατικοί φορείς
Τέλος, η σφαιρική στήριξη με τρεις δρομικές δεσμικές ράβδους συνεπάγεται μια μοναχική δύναμη στο σημείο στήριξης, που εξασφαλίζει τον μηδενισμό της μετατόπισης του σημείου προς κάθε διεύθυνση (Σχ. 3.2.5-5(α3)). Κατά συνέπεια η δύναμη αντίδρασης έχει τρεις συνιστώσες ΑΧ, ΑΥ, ΑΖ. Στην περίπτωση στήριξης του σημείου μέσω ενός σταθερού σφαιρικού εφεδράνου, το εφέδρανο μπορεί να αντικατασταθεί με οποιεσδήποτε τρεις δρομικές δεσμικές ράβδους, αρκεί αυτές να μην είναι συνευθειακές και να μην βρίσκονται στο ίδιο επίπεδο. Αντίστοιχες αντιδράσεις (ροπές) αναπτύσσονται στις περιπτώσεις διπλής ή τριπλής πάκτωσης ενός σημείου (Σχ. 3.2.5-5(β2) και (β3)). Ενώ όμως το είδος (δύναμη ή ροπή) και η διεύθυνση μιας αντίδρασης προκύπτει από το είδος και τη διεύθυνση της αντίστοιχης (δρομικής ή στροφικής) δεσμικής ράβδου, η φορά της και το αριθμητικό της μέγεθος αποτελούν αντικείμενο υπολογισμού.
Y
Z
X
v =0Z
AZ
AZ
(α1)
v =0Z
AZ
(α2)
v =0Xv =0ΥAΥ
AZ
AΥ
ή
A2A1
φ =0Z
ΜΠΖ
(β1)
AZ
(α3)
v =0ΥAΥ
AZ
ή
A1
v =0Z
A X
AΥ
AX
A2
A3
φ =0X
ΜΠΖ
(β2)
φ =0Z
ΜΠX
φ =0X
ΜΠΖ
ΜΠX
ΜΠY
(β3)
φ =0Yφ =0Z
Σχ. 3.2.5-5 Αντιδράσεις των δεσμικών ράβδων στήριξης στον χώρο
3-59
Σ T
A Τ
Ι Κ Η
Ι

Κεφάλαιο 3. Θεμελιώδεις αρχές της Στατικής των γραμμικών φορέων
Β2. Καθορισμός της συμβατικά θετικής φοράς των αντιδράσεων και συμβολισμοί Οι συμβατικά θετικές φορές των αντιδράσεων στήριξης ορίζονται είτε ως συμπίπτουσες με τις θετικές φορές των καθολικών αξόνων αναφοράς Χ, Υ, Ζ είτε - συνηθέστερα - ως αντίθετες προς αυτές. Τέτοιες συμβάσεις χρησιμοποιούνται κατά κανόνα σε προγράμματα ανάλυσης κατασκευών λόγω της υποχρεωτικής τυποποίησης που απαιτεί η κωδικοποίηση και ο προγραμματισμός των μεθόδων επίλυσης σε ηλεκτρονικό υπολογιστή. Αντίθετα, σε επιλύσεις που κάνουμε με το χέρι, οι θετικές φορές των αντιδράσεων μπορούν να ορίζονται όπως μας είναι βολικότερο κάθε φορά. Στα προηγούμενα δύο σχήματα πάντως οι θετικές φορές των αντιδράσεων εισήχθησαν αντίθετα προς τη φορά των καθολικών αξόνων αναφοράς Χ, Υ, Ζ. Σημειώνεται ότι οι δείκτες X, Y, Z χρησιμοποιούνται μόνον όταν υφίσταται λόγος, διαφορετικά μπορούν να παραλειφθούν. Στο ακόλουθο σχήμα 3.2.5-6 φαίνονται οι αντιδράσεις μερικών απλών επίπεδων (εντός του επιπέδου X-Z) και χωρικών γραμμικών φορέων. Για τις αντιδράσεις στήριξης που αντιστοιχούν σε δρομικές δεσμικές ράβδους χρησιμοποιούνται συνήθως τα γράμματα Α, Β, C ή Γ, D ή Δ κτλ. Για τις αντιδράσεις-ροπές που αντιστοιχούν σε στροφικές δεσμικές ράβδους χρησιμοποιείται το γράμμα Μ με τον δείκτη Π, ο οποίος υποδηλώνει ότι πρόκειται για ροπή πάκτωσης. Στα παραδείγματα του σχήματος 3.2.5-6 οι θετικές φορές των αντιδράσεων ορίζονται όλες αντίθετα προς τις θετικές φορές των καθολικών αξόνων αναφοράς Χ, Υ, Ζ. Αν από τους υπολογισμούς που θα ακολουθήσουν προκύψει θετική τιμή για μία οποιαδήποτε αντίδραση Α, τότε η πραγματική φορά της αντίδρασης αυτής συμπίπτει με τη συμβατική φορά της που χρησιμοποιήθηκε στους υπολογισμούς. Αντίθετα, αν από τους υπολογισμούς προκύψει αρνητική τιμή για την Α, τότε η πραγματική φορά της Α είναι αντίθετη προς τη συμβατική φορά της που χρησιμοποιήθηκε στους υπολογισμούς. Αυτό θα γίνει σαφέστερο με τη βοήθεια των παραδειγμάτων που θα παρατεθούν πιο κάτω (βλ. υποπαράγρ. Δ).
Β3. Σύνοψη: Εξωτερικά εντασιακά μεγέθη Με βάση όλα τα παραπάνω (βλ. και πίνακα 3.1.4-1), τα εξωτερικά εντασιακά μεγέθη και οι συνήθεις συμβολισμοί τους συνοψίζονται στον ακόλουθο πίνακα.
Πίνακας 3.2.5-1 Εξωτερικά εντασιακά μεγέθη (στο καθολικό σύστημα Χ-Υ-Ζ)
Εξωτερικές δυνάμεις Εξωτερικές ροπές
συγκεντρωμένες FX, FY, FZ συγκεντρωμένες MLX, MLY, MLZΦορτία
κατανεμημένες qX, qY, qΖ κατανεμημένες mLX, mLY, mLZ
Δυνάμεις Ροπές Αντιδράσεις στηρίξεων ΑX, ΑY, ΑZ ΜΠX, ΜΠY, ΜΠZ
3-60
Σ T
A Τ
Ι Κ Η
Ι

ΣΤΑΤΙΚΗ ΤΩΝ ΚΑΤΑΣΚΕΥΩΝ - Τόμος Ι - Θεμελιώδεις αρχές και ισοστατικοί φορείς
P
HBπ
Απ
Μπ
XZ
P
H=
Πρόβολος στο επίπεδο
π π
Bπ
Απ
Μπ
XZ
B1
Α1 =
Αμφιέρειστη δοκός
B1
Α1
21
B2
B2
q
1 2
q
XZ
B1
Α1 =
Συνεχής δοκός δύο ανοιγμάτων
B1
Α1
1 3
B3
B3
q
1 32
B2
B2
2
q
=
Επίπεδο ημιπλαίσιο
XZ
V1
H1 1
3V3
q
1
32
ΜΠ1
2H3 H3
q
V3
V1
H1
ΜΠ1
P
HΠρόβολος στο χώρο
X
ΜΠX
AX
Y Z
ΜΠZ
AZ
ΜΠY
AY
PΣχάρα δοκών
YX
Z
X
PZAZ3
AZ1
AX1
AY1
AZ2
AY2
3
2
1
Π
PY
Σχ. 3.2.5-6 Αντιδράσεις στηρίξεων απλών επίπεδων και χωρικών γραμμικών φορέων
3-61
Σ T
A Τ
Ι Κ Η
Ι

Κεφάλαιο 3. Θεμελιώδεις αρχές της Στατικής των γραμμικών φορέων
Γ. Ο υπολογισμός των αντιδράσεων στήριξης ενός δίσκου/σώματος
Γ1. Η αρχή της αποδέσμευσης του Lagrange Για τον υπολογισμό των αντιδράσεων θα χρησιμοποιηθεί η αρχή της αποδέσμευσης του Lagrange1. Δεν πρόκειται εδώ για τη μαθηματική διατύπωση κάποιας νομοτελειακής σχέσης, αλλά για τη διατύπωση μιας μεθοδολογικής διαδικασίας. Σύμφωνα με την αρχή της αποδέσμευσης του Lagrange, η εντασιακή κατάσταση ενός δομικού φορέα που βρίσκεται σε ισορροπία δεν μεταβάλλεται λόγω κατάλυσης μιας δεσμικής ράβδου, αν στη θέση της καταλυόμενης δεσμικής ράβδου προσαχθεί η αντίστοιχη αντίδραση. Η κατάλυση (προσοχή: όχι αφαίρεση!) μιας δεσμικής ράβδου πραγματοποιείται με μία νοητή τμήση (τομή) της ράβδου αυτής (Σχ. 3.2.5-7). Η επιφάνεια της τομής που πρόσκειται στο έδαφος ονομάζεται εδαφική όχθη της τομής, ενώ η απέναντι επιφάνεια τομής ονομάζεται συνοριακή όχθη του φορέα. Καταλύοντας τώρα όλες τις δεσμικές ράβδους που συνδέουν έναν στερεά εδραζόμενο και άρα ισορροπούντα δομικό φορέα με το στερεό υπόβαθρο, διαπιστώνουμε ότι εφόσον τα εξωτερικά φορτία δεν εξισορροπούνται μεταξύ τους (αφού η συνισταμένη τους δεν είναι μηδενική), ο αποσυνδεμένος από τους συνδέσμους του φορέας δεν είναι δυνατόν να ισορροπεί. Επομένως, προς διατήρηση της ισορροπίας και μετά την κατάλυση των συνδέσμων, πρέπει να προσαχθούν στις συνοριακές όχθες του φορέα μεγέθη έντασης που να εξισορροπούν τα εξωτερικά του φορτία (Σχ. 3.2.5-7(γ)). Τα εντασιακά αυτά μεγέθη που ασκούνται επάνω στον φορέα είναι προφανώς οι προαναφερθείσες αντιδράσεις στήριξης. Ταυτόχρονα, στις εδαφικές όχθες των τομών ασκούνται λόγω του 3ου αξιώματος του Νεύτωνα (actio=reactio) οι ίσες και αντίθετες δυνάμεις έδρασης, οι οποίες παραλαμβάνονται από το στερεό υπόβαθρο. Σύμφωνα με τα παραπάνω, οι αντιδράσεις στηρίξεων φορτίζουν έναν ισορροπούντα φορέα με την ίδια έννοια που τον φορτίζουν και τα υπόλοιπα εξωτερικά φορτία (με τα οποία αυτές βρίσκονται σε ισορροπία), και γι' αυτό τις κατατάσσουμε στα εξωτερικά εντασιακά μεγέθη. Επειδή ο νοητά αποσπασθείς από τις στηρίξεις του φορέας δεν έχει πλέον κινηματικές δεσμεύσεις, χαρακτηρίζεται ως ελεύθερος φορέας ή ελεύθερο σώμα. Ένας ελεύθερος φορέας μαζί με το σύνολο των δυνάμεων που ασκούνται επάνω του, δηλαδή με όλα τα εξωτερικά φορτία και όλες τις αντιδράσεις στήριξης, χαρακτηρίζεται ως διάγραμμα ελεύθερου φορέα ή διάγραμμα ελεύθερου σώματος (Σχ. 3.2.5-7(γ)). Η παραπάνω διαδικασία αποδέσμευσης του φορέα από τις στηρίξεις του με τη βοήθεια νοητών τομών προκειμένου να γίνει δυνατός ο υπολογισμός των αντιδράσεων στήριξης δεν είναι παρά μία συγκεκριμένη εφαρμογή της γενικότερης μεθόδου των νοητών διαχωριστικών τομών, στην οποία θα αναφερθούμε διεξοδικότερα στην επόμενη παράγραφο. Τονίζεται πάντως ήδη εδώ ότι δεν 1 Η ονομασία αυτή (στα γερμανικά: Befreiungsprinzip von Lagrange) προέρχεται από τον διακεκριμένο Γερμανό καθηγητή της Μηχανικής GEORG HAMEL (1877-1954), σύμφωνα με τον οποίο πρώτος ο JΟSEPH LOUIS LAGRANGE (1736-1813) εισήγαγε την ιδέα της αποδέσμευσης ενός φορέα από τις στηρίξεις του στο θεμελιώδες έργο του Méchanique Analytique (1788). 3-62
Σ T
A Τ
Ι Κ Η
Ι

ΣΤΑΤΙΚΗ ΤΩΝ ΚΑΤΑΣΚΕΥΩΝ - Τόμος Ι - Θεμελιώδεις αρχές και ισοστατικοί φορείς
πρόκειται για μεμονωμένες τομές ορισμένων μόνο δεσμικών ράβδων, αλλά για κλειστές διαχωριστικές τομές ("κυκλικές" σε επίπεδους φορείς και "σφαιρικές" σε χωρικούς), με τις οποίες αποσπάται ολόκληρος ο φορέας από τις στηρίξεις του. Ο χαρακτηρισμός των κλειστών αυτών διαχωριστικών τομών ως "κυκλικών" ή "σφαιρικών" θέλει να τονίσει ακριβώς αυτό.
(α) Φορέας σε κατάστασηισορροπίας (β) Κατάλυση συνδέσμων
εδαφική όχθη
συνοριακή όχθηφορέα
τομή (τμήση)δεσμικής ράβδου
(γ) Διάγραμμα ελεύθερου σώματος
αντίδραση στήριξης
δύναμηέδρασης
αντίδρασηστήριξης
Διάγραμμα ελεύθερου σώματοςκλειστή (κυκλική)διαχωριστική τομή
Σχ. 3.2.5-7 Η αρχή της αποδέσμευσης του Lagrange και το διάγραμμα ελεύθερου σώματος
Γ2. Υπολογισμός των αντιδράσεων στήριξης με τις συνθήκες ισορροπίας Για τον υπολογισμό των άγνωστων αντιδράσεων στήριξης ενός στερεά εδραζόμενου φορέα αποδεσμεύουμε πρώτα τον φορέα (τον οποίο θεωρούμε ως απολύτως στερεό σώμα ή δίσκο) από τους συνδέσμους του εφαρμόζοντας την αρχή της αποδέσμευσης του Lagrange και σχεδιάζουμε το διάγραμμα ελεύθερου σώματος. Στη συνέχεια καταστρώνουμε τις συνθήκες ισορροπίας στον αποδεσμευμένο φορέα. Στη γενική περίπτωση χωρικών φορέων έχουμε στη διάθεσή μας σύμφωνα με την παράγραφο 3.2.3-Γ τις έξι στερεοστατικές συνθήκες ισορροπίας:
0F0F0F nZnYnX === ∑∑∑ (3.2.5-1α)
0M0M0M nZnYnX === ∑∑∑ (3.2.5-1β)
3-63
Σ T
A Τ
Ι Κ Η
Ι

Κεφάλαιο 3. Θεμελιώδεις αρχές της Στατικής των γραμμικών φορέων
ενώ στην ειδικότερη περίπτωση των επίπεδων φορέων που φορτίζονται μέσα στο επίπεδό τους διαθέτουμε μόνο τρεις. Π.χ., στο επίπεδο X-Z διαθέτουμε τις εξής τρεις συνθήκες ισορροπίας:
0M0F0F nYnZnX === ∑∑∑ (3.2.5-2)
Στις παραπάνω έξι (ή τρεις) συνθήκες ισορροπίας υπεισέρχονται αφενός τα γνωστά εξωτερικά φορτία και αφετέρου οι m άγνωστες αντιδράσεις Αm των στηρίξεων. Επομένως οι συνθήκες ισορροπίας αποτελούν τις επιλύουσες εξισώσεις για τις m άγνωστες αντιδράσεις στήριξης. Οι εξισώσεις αυτές συγκροτούν ένα σύστημα γραμμικών εξισώσεων, το οποίο - όπως γνωρίζουμε από τα Μαθηματικά - επιδέχεται μονοσήμαντη λύση μόνο αν το πλήθος m των αγνώστων είναι ίσο με το πλήθος των εξισώσεων και μόνο εφόσον η ορίζουσα detA του μητρώου A των συντελεστών των αγνώστων δεν μηδενίζεται.
Δ. Απλά αριθμητικά παραδείγματα και συμπληρωματικές παρατηρήσεις
Ακολούθως εξετάζονται οι πιθανές περιπτώσεις που προκύπτουν κατά την επίλυση των εξισώσεων ισορροπίας προς υπολογισμό των αντιδράσεων στήριξης ενός χωρικού ή επίπεδου φορέα και δίνονται ορισμένα απλά αριθμητικά παραδείγματα.
Δ1. Στατικά ορισμένη (ισοστατική), κινηματικά ορισμένη (στερεή) στήριξη
Αν ο χωρικός/επίπεδος φορέας στηρίζεται με ακριβώς έξι/τρεις δεσμικές ράβδους, αν δηλαδή οι άγνωστες αντιδράσεις του Αm είναι όσες ακριβώς και οι διαθέσιμες εξισώσεις ισορροπίας (m=6 στον χώρο, m=3 στο επίπεδο) και αν ταυτόχρονα η ορίζουσα των συντελεστών των αγνώστων είναι μη μηδενική (detA≠0), τότε η επίλυση του συστήματος είναι μονοσήμαντη και μας δίνει τις ζητούμενες αριθμητικές τιμές των άγνωστων αντιδράσεων. Στην περίπτωση αυτή, η στήριξη χαρακτηρίζεται ως στατικά ορισμένη ή ισοστατική. Η μονοσήμαντη επίλυση των εξισώσεων ισορροπίας σημαίνει ότι ο φορέας ισορροπεί και κατά συνέπεια η στήριξή του είναι στερεή (κινηματικά ευσταθής) και κινηματικά ορισμένη.
Τα ακόλουθα παραδείγματα Δ1-1 έως Δ1-5 αφορούν στον υπολογισμό αντιδράσεων στήριξης απλών ισοστατικών φορέων, οι οποίοι αφαιρουμένων των στηρίξεών τους αποτελούν δίσκους στο επίπεδο ή σώματα στον χώρο.
3-64
Σ T
A Τ
Ι Κ Η
Ι

ΣΤΑΤΙΚΗ ΤΩΝ ΚΑΤΑΣΚΕΥΩΝ - Τόμος Ι - Θεμελιώδεις αρχές και ισοστατικοί φορείς
Παράδειγμα Δ1-1: Αμφιέρειστη δοκός με συγκεντρωμένα φορτία
(Σημ.: Το σημείο 4 θα χρησιμοποιηθεί αργότερα στο Παράδειγμα Δ4-1)
H
12
3
L/2 L/2
PZPX
Δεδομένος φορέας
1
2
3PZPX
Κυκλική διαχωριστική τομή
A Z1 A Z3
A X1
fl
και κατάλυση συνδέσμων
1
2
3PZPX
A Z1 A Z3
fl
A X1
ή
1
2
3PZPX
A Z1 A Z3
A X1
Διάγραμμα ελευθέρου σώματος
2
PZPX
Συνήθης απεικόνιση
A Z1 A Z3
1 3A X1
XZ
• 4
Εξισώσεις ισορροπίας:
( )
( )
( ) ( )
⇓
=⎟⎠⎞
⎜⎝⎛+⎟
⎠⎞
⎜⎝⎛−⇒=
=+−−⇒=
=+−⇒=
••∑
∑
∑
02LA
2LA0M3
0PAA0F2
0PA0F1
Z3Z12
ZZ3Z1Z
XX1X
Μητρωική διατύπωση:
( ) ( ) ( )
στερεή στήριξη 0L
12L
2L11detA
:ΈλεγχοςA
→≠=
⎥⎦
⎤⎢⎣
⎡−⎟
⎠⎞
⎜⎝⎛ −−⎟
⎠⎞
⎜⎝⎛−−=
=+
−
−−
−
•••
•
0
0
0
0
P
P
A
A
A
2L2L0
110
001
Z
X
Z3
Z1
X1
44 344 21
( )( )( )
⎪⎩
⎪⎨⎧
=
=⇒+−=
=⇒
+−=⇒
=⇒
2PA
2PAPAA
AA3
PAA2
PA1:Λύση
ZZ1
ZZ3
ZZ3Z3
Z1Z3
ZZ3Z1
XX1
Σχ. 3.2.5-8 Αμφιέρειστη ισοστατική δοκός στο επίπεδο
3-65
Σ T
A Τ
Ι Κ Η
Ι

Κεφάλαιο 3. Θεμελιώδεις αρχές της Στατικής των γραμμικών φορέων
Με ανάλογο τρόπο υπολογίζονται οι αντιδράσεις στήριξης οποιουδήποτε αμφιέρειστου φορέα, αρκεί αυτός να αποτελεί επίπεδο δίσκο (βλ. ορισμό στην παράγρ. 3.2.4-Α1). Ως μικρή άσκηση ο αναγνώστης καλείται να επαληθεύσει τις τιμές των αντιδράσεων στήριξης των απλών αμφιέρειστων φορέων που δίνονται στο παρακάτω σχήμα 3.2.5-9.
L
q
AZ1 AZ2
A X1
α) Αμφιέρειστη δοκός με συνεχές ομοιόμορφο φορτίο
Α =0Χ1
Α qΖ1•L( )/2=
Α qΖ2•L( )/2=
AZ1
AX1
β) Αμφιέρειστο κυκλικό τόξο με συγκεντρωμένο φορτίο
AZ3Α =Χ1
ΑΖ1 0=
45oP
•
R
P •cos45o = P•0.707
Α =Z3 P •sin45o = P•0.707
XZ
XZ
3
2
1
1 2
XZ
γ) Αμφιέρειστο δίστυλο πλαίσιο με συνεχές ομοιόμορφο φορτίο
L
q
1
2
AZ1 AZ4
A X1
3
4
H
Α =0Χ1
Α qΖ1•L( )/2=
Α qZ4•L( )/2=
XZ
δ) Αμφιέρειστο κλειστό πλαίσιο με συνεχές ομοιόμορφο φορτίο
L
q
1
2
AZ1 AZ4
A X1
3
4
H
Α =0Χ1
Α qΖ1•L( )/2=
Α qZ4•L( )/2=
XZ
ε) Αμφιέρειστος ραβδοδίσκος με συνεχές ομοιόμορφο φορτίο
1
L
q
2AZ2
A X1
3H
Α qZ2•L=
A X2Α qX1
•L( ) /= 2 (2 •H)
Α qX2•L( ) /= 2 (2 •H)
Σχ. 3.2.5-9 Αμφιέρειστοι επίπεδοι δίσκοι
3-66
Σ T
A Τ
Ι Κ Η
Ι

ΣΤΑΤΙΚΗ ΤΩΝ ΚΑΤΑΣΚΕΥΩΝ - Τόμος Ι - Θεμελιώδεις αρχές και ισοστατικοί φορείς
Παράδειγμα Δ1-2: Πρόβολος στο επίπεδο
1 2
L
VH
Δεδομένος φορέας
1
Κυκλική διαχωριστική τομή
ΒΠ
AΠ
fl
και κατάλυση συνδέσμων
1fl
ή
1
Διάγραμμα ελευθέρου σώματος
Συνήθης απεικόνιση
1
XZ
2
VH
ΜΠ
2
VH
2
VH
ΒΠ
AΠ
ΜΠ
ΜΠ
ΒΠ
AΠ
ΜΠ
ΒΠ
AΠ 2
VH
Εξισώσεις ισορροπίας:
( )
( )
( ) ( )
⇓
=−−⇒=
=+−⇒=
=+−⇒=
•∑∑∑
0LVΜ0M3
0VΒ0F2
0HA0F1
Π1
ΠZ
ΠX
Μητρωική διατύπωση:
( ) ( ) ( )στερεή στήριξη
01111detA
:Έλεγχος
0
0
0
LV
V
Η
Μ
Β
A
A
100
010
001
Π
Π
Π
→
≠−=−−−=
=
−
+
−
−
−
••
•
•
43421
( )( )( ) LVM3
VΒ2
ΗA1:Λύση
Π
Π
Π
•−=⇒
=⇒
=⇒
Σχ. 3.2.5-10 Πρόβολος στο επίπεδο
3-67
Σ T
A Τ
Ι Κ Η
Ι

Κεφάλαιο 3. Θεμελιώδεις αρχές της Στατικής των γραμμικών φορέων
Παράδειγμα Δ1-3: Πρόβολος στον χώρο
3P
Y ZX
=8mL1
1 2
=100kNZ3
=2mL2
P
=8mL1
=100kNZ
=2mL2
XY
κάτοψηΔεδομένος φορέας
21
1 23
1 2
3
ΜΠXA
ΜΠZ
CΠ
ΜΠYΒΠ
PZ
"Σφαιρική" διαχωριστική τομήκαι κατάλυση συνδέσμων
Π
flPZ
Διάγραμμα ελευθέρου σώματος
Εξισώσεις ισορροπίας:
( )
( )
( )
( ) ( )
( ) ( )
( ) ( )
⇓
=⇒=
=−−⇒=
=−−⇒=
=+−⇒=
=⇒=
=⇒=
∑
∑
∑∑
∑
∑
•
•
0M0M6
0LPM0M5
0LPM0M4
0PC0F3
0Β0F2
0A0F1
ΠZ1Z
1ZΠY1Y
2ZΠX1X
ZΠZ
ΠY
ΠX
Μητρωική διατύπωση:
( ) ( ) ( ) ( )στερεή στήριξη
01111111detA
:Έλεγχος
0
0
0
0
0
0
0
LP
LP
P
0
0
Μ
Μ
Μ
C
Β
A
A
100000
010000
001000
000100
000010
000001
1Z
2Z
Z
ΠZ
ΠY
ΠX
Π
Π
Π
→
≠=−−−−=
=
−
−+
−
−
−
−
•••••
•
•
•
4444 34444 21
( ) ( ) ( )( )( )( ) 800kNmLPM5
200kNmLPM4
100kNPC3
0MΒA6,2,1
:Λύση
1ZΠY
2ZΠX
ZΠ
ΠZΠΠ
−=−=⇒
−=−=⇒
==⇒
===⇒
•
•
Σχ. 3.2.5-11 Πρόβολος στον χώρο
3-68
Σ T
A Τ
Ι Κ Η
Ι

ΣΤΑΤΙΚΗ ΤΩΝ ΚΑΤΑΣΚΕΥΩΝ - Τόμος Ι - Θεμελιώδεις αρχές και ισοστατικοί φορείς
Παράδειγμα Δ1-4: Επίπεδη σχάρα δοκών στον χώρο
PY Z
X
X
PZ
PY
A Z3
A Z1
A X1
A Y1
A Z2
A Y2
L1=2m L2=4m
4
2
1
3
5=100kN
=30kN=50kN
L3=5m
L4=3m
Εξισώσεις ισορροπίας:
( )
( )
( )
( ) ( )
( ) ( ) ( )
( ) ( ) ( )
⇓
=++−⇒=
=+−+⇒=
=−⇒=
=+−−−⇒=
=+−−⇒=
=+−⇒=
••
•••
••
∑∑∑∑∑∑
0LLPLA0M6
0LLPLALA0M5
0LALA0M4
0PAAA0F3
0PAA0F2
0PA0F1
21Y1Y21Z
21Z1Z31Z21Y
3Z24Z31X
ZZ3Z2Z1Z
YY2Y1Y
XX1X
Μητρωική διατύπωση:
( )
( )
στερεή στήριξη 0detA :Έλεγχος
0
0
0
0
0
0
LLP
LLP
0
P
P
P
A
A
A
A
A
A
A
000L00
LL0000
LL0000
111000
000110
000001
21Y
21Z
Z
Y
X
Z3
Z2
Z1
Y2
Y1
X1
1
11
43
→≠
=
+
+−
+
−
−
−−−
−−
−
•
•
•
444444 3444444 21
( ) ( ) ( )[ ] ( )[ ]( )( ) ( ) ( ) 200kNA3 112.5kN A187.5kN,A54
100kN50150PAA2
150kN24250LLLPA6 30kN,PA1:Λύση
Z1Z2Z3
YY2Y1
121YY2XX1
−=⇒==⇒+
−=+−=+−=⇒
=+=+=⇒==⇒ ••
Σχ. 3.2.5-12 Επίπεδη σχάρα δοκών στον χώρο
3-69
Σ T
A Τ
Ι Κ Η
Ι

Κεφάλαιο 3. Θεμελιώδεις αρχές της Στατικής των γραμμικών φορέων
Παράδειγμα Δ1-5: Χωροπλαίσιο
AZ1
A X1
AY1
A Z2
AX22
1 AZ3
3
Y Z
X L1
L2 PZ
Εξισώσεις ισορροπίας:
( )
( )
( )
( ) ( )
( ) ( )
( ) ( )
⇓
=−⇒=
=−⇒=
=+⇒=
=+−−−⇒=
=⇒=
=−−⇒=
•
••
••
∑∑∑∑∑∑
0LA0M6
0LPLA0M5
0LALA0M4
0PAAA0F3
0A0F2
0AA0F1
2X21Z
1Z1Z31Y
2Z32Z21X
ZZ3Z2Z1Z
Y1Y
X2X1X
Μητρωική διατύπωση:
στερεή στήριξη 0detA :Έλεγχος
0
0
0
0
0
0
0
LP
0
P
0
0
A
A
A
A
A
A
A
0000L0
L00000
LL0000
111000
000100
000011
1Z
Z
Z3
Z2
Z1
Y1
X2
X1
2
1
22
→≠
=
−
+
−
−−−
−−
•
•
444444 3444444 21
( ) ( ) ( )( ) ( )( ) ( ) ZZZZZZ3Z2Z1
ZZ3Z2ZZ3
Y1X2X1X2
PPPPPAAA3
PAA4 ,PA5
0A2 0,AA1 0,A6:Λύση
=+−−−=+−−=⇒
−=−=⇒=⇒
=⇒=−=⇒=⇒
Σχ. 3.2.5-13 Χωροπλαίσιο
3-70
Σ T
A Τ
Ι Κ Η
Ι

ΣΤΑΤΙΚΗ ΤΩΝ ΚΑΤΑΣΚΕΥΩΝ - Τόμος Ι - Θεμελιώδεις αρχές και ισοστατικοί φορείς
Δ2. Στατικά υπερορισμένη, κινηματικά υποορισμένη (χαλαρή) στήριξη Αν ο χωρικός/επίπεδος φορέας στηρίζεται μεν με ακριβώς έξι/τρεις δεσμικές ράβδους, αλλά η ορίζουσα του μητρώου Α των συντελεστών των αγνώστων είναι μηδενική (detA=0), τότε η επίλυση του συστήματος δεν είναι μονοσήμαντα δυνατή. O μηδενισμός της ορίζουσας σημαίνει ότι οι εξισώσεις ισορροπίας εμφανίζουν γραμμικές εξαρτήσεις και συνεπώς οι έξι/τρεις δεσμικές ράβδοι δεν δεσμεύουν και τους έξι/τρεις βαθμούς ελευθερίας του χωρικού/επίπεδου φορέα, αλλά λιγότερους. Επομένως ο φορέας δεν ισορροπεί και κατά συνέπεια η στήριξή του είναι χαλαρή (κινηματικά ασταθής) και συνεπώς κινηματικά υποορισμένη. Το ίδιο ισχύει και στην περίπτωση που για τη στήριξη του φορέα χρησιμοποιούνται λιγότερες των έξι ή τριών δεσμικών ράβδων στον χώρο ή στο επίπεδο αντίστοιχα. Στις παραπάνω περιπτώσεις η στήριξη μπορεί να χαρακτηριστεί και ως στατικά υπερορισμένη.
Παράδειγμα Δ2-1: Αμφιέρειστη δοκός στο επίπεδο με κατακόρυφη κύλιση στο δεξιό άκρο
1
2
3
1 2 3L/2 L/2
PZPX
Δεδομένος φορέας
1 3PX
Κυκλική δια στική τομή
2
PZ
χωρικαι κατάλυσ νδέσμωνη συ
flfl
PZPX
AZ1
AX3
AX1
Διάγραμμα ελεύθερου σώματος
XZ
• 4
H
Εξισώσεις ισορροπίας:
( )
( )
( ) ( )
⇓
=−
−+−⇒=
=+−⇒=
=+−−⇒=
•
•••∑
∑
∑
0HP
HA2LAHA0M3
0PA0F2
0PAA0F1
X
X3Z1X14
ZZ1Z
XX3X1X
Μητρωική διατύπωση:
( ) ( ) ( )[ ]( ) ( ) ( )[ ]
αδύνατη! επίλυση
χαλαρή! στήριξη
0HHH12L01
2L0H11detA
:Έλεγχος
0
0
0
HP
P
P
A
A
A
A
H2LH
010
101
X
Z
X
X3
Z1
X1
→
→
=−=−−−−+
+−−−−=
=
−
+
−
−
−−
•••
•••
•
•
444 3444 21
Σχ. 3.2.5-14 Χαλαρή στήριξη διέρειστης δοκού στο επίπεδο (απειροστή χαλαρότητα)
3-71
Σ T
A Τ
Ι Κ Η
Ι

Κεφάλαιο 3. Θεμελιώδεις αρχές της Στατικής των γραμμικών φορέων
Η χαλαρότητα της στήριξης της παραπάνω δοκού προκύπτει και από το γεγονός ότι οι άξονες των τριών δρομικών δεσμικών ράβδων τέμνονται στο ίδιο σημείο. Επίσης, καταστρώνοντας τη συνθήκη ισορροπίας ΣΜ(1)=0 παίρνουμε Ρz·L/2=0, πράγμα που είναι άτοπο, αφού Ρz≠0 και L≠0.
Σημείωση Δ2: 'Απειροστή χαλαρότητα' και 'Πεπερασμένη χαλαρότητα' στήριξης
Στη συγκεκριμένη περίπτωση πρόκειται για απειροστή χαλαρότητα, διότι η κατακόρυφη μετατόπιση του δεξιού άκρου της δοκού του σχήματος 3.2.5-14 δεν μπορεί παρά να είναι απειροστή λόγω της παραδοχής του απολύτως στερεού σώματος, η οποία αποτελεί τη βάση για τον έλεγχο στερεότητας της στήριξης ενός φορέα. Πράγματι, απειροστή μετατόπιση του άκρου αυτού σημαίνει L1≈L, δηλαδή το μήκος της δοκού δεν μεταβάλλεται, ενώ πεπερασμένου μεγέθους μετατόπιση προς τα κάτω (ή προς τα επάνω) θα συνεπαγόταν αύξηση του μήκους της δοκού (L2>L), πράγμα αδύνατον για ένα απολύτως στερεό σώμα (Σχ. 3.2.5-15). Πιο κάτω θα δούμε απλές περιπτώσεις στις οποίες η υφιστάμενη χαλαρότητα στήριξης δεν είναι απειροστή, αλλά πεπερασμένη (π.χ. βλ. Παράδειγμα Δ3-2).
L
Lφ1 (cosφ1 1 L1 L)
φ2
(cosφ2<1 L2 L )> 1
L2
1απειροστήμετατόπιση
πεπερασμένημετατόπιση:Αδύνατη, αν ηδοκός είναιαπολύτως στερεή.
Σχ. 3.2.5-15 Απειροστή χαλαρότητα
Παράδειγμα Δ2-2: Τριέρειστη δοκός στο επίπεδο με συγκλίνουσες δεσμικές ράβδους
Όπως και στο προηγούμενο παράδειγμα, οι άξονες των τριών δρομικών δεσμικών ράβδων στήριξης της τριέρειστης δοκού του σχήματος 3.2.5-16 συντρέχουν στο ίδιο σημείο Ω, δηλαδή η δοκός εμφανίζει απειροστή χαλαρότητα. Για τις τρεις αντιδράσεις στήριξης της δοκού αυτής έχουμε μεν στη διάθεσή μας τρεις συνθήκες ισορροπίας, αλλά αυτές εμφανίζουν γραμμική εξάρτηση: Οι συνθήκες ΣFZ=0 και ΣM(1)=0 είναι τελικώς ταυτόσημες ή, όπως εύκολα διαπιστώνει κανείς, η ορίζουσα του συστήματος των τριών διαθέσιμων εξισώσεων μηδενίζεται και επομένως το σύστημα δεν επιλύεται.
3-72
Σ T
A Τ
Ι Κ Η
Ι

ΣΤΑΤΙΚΗ ΤΩΝ ΚΑΤΑΣΚΕΥΩΝ - Τόμος Ι - Θεμελιώδεις αρχές και ισοστατικοί φορείς
1
2
3
1
2
3
L 2L
Δεδομένος φορέας
Κυκλική διαχωριστική τομήκαι κατάλυση συνδέσμων
flfl
Διάγραμμα ελεύθερου σώματος
XZ
PZPX
•
α α
Ω
L
•
PZPX
•
PZPX1 2 3
A B C
Εξισώσεις ισορροπίας:
( )
( )
( ) ( ) ( ) ( )
⇓
=−+⇒=
=+−−−⇒=
=+−⇒=
••••
••
••
∑
∑
∑
0LP4LsinαC2LB0M3
0PsinαCBsinαA0F2
0PcosαCcosαA0F1
Z1
ZZ
XX
Μητρωική διατύπωση:
( ) ( )[ ]
( ) ( ) ( )[ ]
( )
αδύνατη! επίλυση
χαλαρή! στήριξη
02Lsinαcosα2Lsinαcosα
012Lsinαcosα
sinα2Lsinα4L1cosαdetA
:Έλεγχος
0
0
0
LP
P
P
C
Β
A
A
sinα4L2L0
sinα1sinα
cosα0cosα
Z
Z
X
→
→
=+−=
−−−−+
+−−−=
=
−
+−−−
−
••••
•••
••••
•
•
•
44444 344444 21
Σχ. 3.2.5-16 Χαλαρή στήριξη τριέρειστης δοκού στο επίπεδο (απειροστή χαλαρότητα)
3-73
Σ T
A Τ
Ι Κ Η
Ι

Κεφάλαιο 3. Θεμελιώδεις αρχές της Στατικής των γραμμικών φορέων
Η χαλαρότητα της στήριξης της παραπάνω δοκού προκύπτει - όπως και στο προηγούμενο παράδειγμα Δ2-1 - από το γεγονός ότι οι άξονες των τριών δρομικών δεσμικών ράβδων τέμνονται στο ίδιο σημείο.
Δ3. Στατικά υποορισμένη ή στατικά αόριστη ή υπερστατική στήριξη Αν ο χωρικός/επίπεδος φορέας στηρίζεται με περισσότερες των έξι/τριών δεσμικών ράβδων, αν δηλαδή οι άγνωστες αντιδράσεις του Αm είναι περισσότερες από τις διαθέσιμες εξισώσεις ισορροπίας (m>6 στον χώρο, m>3 στο επίπεδο), τότε οι άγνωστες αντιδράσεις δεν είναι δυνατόν να προσδιοριστούν μονοσήμαντα. Στην περίπτωση αυτή η στήριξη χαρακτηρίζεται ως στατικά υποορισμένη ή στατικά αόριστη ή υπερστατική. Μια υπερστατική στήριξη μπορεί να είναι στερεή ή χαλαρή. Η υπερστατική στήριξη ενός φορέα είναι στερεή, αν μεταξύ των m>6 (m>3) δεσμικών ράβδων υπάρχουν έξι (τρεις) που εξασφαλίζουν τη στερεότητά της. Σε αντίθετη περίπτωση η υπερστατική στήριξη είναι χαλαρή.
Παράδειγμα Δ3-1: Συνεχής δοκός δύο ανοιγμάτων με στερεή υπερστατική στήριξη Η δοκός του σχήματος 3.2.5-17 έχει τέσσερεις αντιδράσεις στήριξης, για τις οποίες έχουμε στη διάθεσή μας μόνον τις τρεις συνθήκες ισορροπίας. Επομένως, οι συνθήκες ισορροπίας δεν επαρκούν για τον μονοσήμαντο προσδιορισμό των αντιδράσεων στήριξης.
1 2 3
L 2L
Δεδομένος φορέας
fl
Διάγραμμα ελεύθερου σώματος
XZ
PZPX
L
PZPX 2
AZ1
AX1
AZ2 AZ3
1 3
Εξισώσεις ισορροπίας:
( )
( )
( ) ( ) ( ) ( )
⇓
=−+⇒=
=+−−−⇒=
=+−⇒=
•••∑∑∑
0LP4LA2LA0M3
0PAAA0F2
0PA0F1
ZZ3Z21
ZZ3Z2Z1Z
XX1X
Μητρωική διατύπωση:
ήυπερστατικ Στήριξη
0
0
0
LP
P
P
A
A
A
A
A
4L2L00
1110
0001
Z
Z
X
Z3
Z2
Z1
X1
→
→
=
−
+−−−
−
•
•
μεγέθη άγνωστα τέσσερα
για εξισώσεις διαθέσιμες Τρεις
44 344 21
Σχ. 3.2.5-17 Συνεχής δοκός δύο ανοιγμάτων (στερεή υπερστατική στήριξη)
3-74
Σ T
A Τ
Ι Κ Η
Ι

ΣΤΑΤΙΚΗ ΤΩΝ ΚΑΤΑΣΚΕΥΩΝ - Τόμος Ι - Θεμελιώδεις αρχές και ισοστατικοί φορείς
Παράδειγμα Δ3-2: Συνεχής δοκός δύο ανοιγμάτων με κατακορύφως υπερστατική, αλλά οριζοντίως χαλαρή στήριξη
1 2 3
L 2L
Δεδομένος φορέας
fl
Διάγραμμα ελεύθερου σώματος
XZ
PZPX
L
PZPX 21 3
AZ1 AZ2 AZ3
Εξισώσεις ισορροπίας:
( )
( )
( )
( ) ( ) ( ) ( ) 0LP4LA2LA0M3
0PAAA0F2
0!P0F1
ZZ3Z21
ZZ3Z2Z1Z
XX
=−+⇒=
=+−−−⇒=
=⇒=
•••∑∑
∑
μηδενικά.είναιτουφορτίαΧκατάταότανΧ,κατάισορροπεί μόνοτότεότικαικινητότηταηπεπερασμένέχειδιεύθυνσηοριζόντια
τηνκατάχαλαρόςείναιφορέαςδεδομένοςοότισημαίνειΑυτό
ήυπερστατικ ςκατακορύφω Στήριξη
→
→ μεγέθη άγνωστα τρία για εξισώσεις διαθέσιμες Δύο
Σχ. 3.2.5-18 Συνεχής δοκός δύο ανοιγμάτων (κατακορύφως υπερστατική, αλλά οριζοντίως χαλαρή στήριξη με πεπερασμένη χαλαρότητα)
Σημείωση Δ3-α: Υπερστατική στήριξη και υπερστατικός φορέας Θα δούμε αργότερα (παράγρ. 3.2.7) ότι ένας φορέας χαρακτηρίζεται ως υπερστατικός, αν οι συνθήκες ισορροπίας δεν επαρκούν για τον υπολογισμό των εντασιακών μεγεθών του (είτε μόνο των εσωτερικών είτε εξωτερικών και εσωτερικών). Σύμφωνα με τον ορισμό αυτόν, υπερστατικά εδραζόμενοι δίσκοι, όπως π.χ. η συνεχής δοκός δύο ανοιγμάτων του σχήματος 3.2.5-17, ανήκουν στην κατηγορία των υπερστατικών φορέων. Υπάρχουν όμως και υπερστατικοί φορείς που εδράζονται ισοστατικά. Πρόκειται για τους εσωτερικά υπερστατικούς φορείς, για τους οποίους τα εξωτερικά εντασιακά μεγέθη, δηλαδή οι αντιδράσεις στήριξης, υπολογίζονται από τις συνθήκες ισορροπίας, όχι όμως και τα εσωτερικά εντασιακά μεγέθη. Ένα απλό παράδειγμα ισοστατικά εδραζόμενου υπερστατικού φορέα αποτελεί το αμφιέρειστο κλειστό πλαίσιο του σχήματος 3.2.5-9(δ), του οποίου οι τρεις αντιδράσεις στήριξης υπολογίστηκαν ακριβώς όπως και για μία αμφιέρειστη δοκό.
3-75
Σ T
A Τ
Ι Κ Η
Ι

Κεφάλαιο 3. Θεμελιώδεις αρχές της Στατικής των γραμμικών φορέων Σημείωση Δ3-β: Στερεή και χαλαρή υπερστατική στήριξη Προκειμένου να διαπιστώσουμε αν η υπερστατική στήριξη της δοκού του σχήματος 3.2.5-17 είναι στερεή ή χαλαρή αφαιρούμε μία από τις τέσσερεις δεσμικές ράβδους, π.χ. την κατακόρυφη ράβδο στο σημείο 3. Ο φορέας που προκύπτει είναι - όπως εύκολα αναγνωρίζει κανείς - ισοστατικός και στερεά εδραζόμενος. Επομένως και ο αρχικός φορέας, ο οποίος συνδέεται με το στερεό υπόβαθρο με μία ακόμη δεσμική ράβδο (αυτήν του σημείου 3), είναι και αυτός στερεός. Όπως όμως φαίνεται στο προηγούμενο παράδειγμα Δ3-2, η στήριξη ενός φορέα μπορεί να είναι υπερστατική κατά μία διεύθυνση (π.χ. κατά Ζ) και ταυτόχρονα χαλαρή κατά μία άλλη διεύθυνση (π.χ. κατά Χ).
Σημείωση Δ3-γ: Πεπερασμένη χαλαρότητα στήριξης Σε αντίθεση με τις δοκούς των σχημάτων 3.2.5-14 και 3.2.5-16, η χαλαρότητα της συνεχούς δοκού του παραδείγματος Δ3-2 δεν είναι απειροστή, αλλά πεπερασμένη. Πράγματι, όπως είναι προφανές, οι τρεις οριζόντιες στηρίξεις-κυλίσεις δεν θέτουν κανέναν περιορισμό στο μέγεθος της οριζόντιας μετατόπισης της δοκού προς τα αριστερά ή προς τα δεξιά.
Σημείωση Δ3-δ: Διευκρίνιση των εννοιών 'χαλαρότητα'-'κινητότητα', 'χαλαρός'-'κινητός' Συχνά, αντί του όρου 'απειροστή χαλαρότητα' χρησιμοποιείται λανθασμένως ο όρος 'απειροστή κινητότητα'. Ο όρος 'κινητότητα' χρησιμοποιείται κατά κανόνα για να υποδηλώσει ότι ένας φορέας εμφανίζει μετακινήσεις υπό τη δράση κάποιας εξωτερικής φόρτισης. Στην περίπτωση αυτή οι μετακινήσεις συνοδεύονται από ελαστικές παραμορφώσεις και αντίστοιχες εντάσεις (π.χ. αντιδράσεις στήριξης). Αντίθετα, ο όρος 'χαλαρότητα' χρησιμοποιείται για να υποδηλώσει ότι ο φορέας μπορεί να εμφανίσει μετακινήσεις χωρίς τη δράση εξωτερικών φορτίσεων, πράγμα που σημαίνει ότι οι μετακινήσεις του δεν οφείλονται σε παραμορφώσεις των δομικών του στοιχείων και συνεπώς δεν συνοδεύονται από ένταση. Σύμφωνα με τους ορισμούς αυτούς, οι φορείς των σχημάτων 3.2.5-14, 3.2.5-16 και 3.2.5-18 εμφανίζουν χαλαρότητα (απειροστή ή πεπερασμένη) και όχι κινητότητα. Ο επιθετικός προσδιορισμός 'κινητός' χρησιμοποιείται συνήθως για πλαισιακούς φορείς, όπως θα δούμε αργότερα κατά την ανάπτυξη της μεθόδου μετακινήσεων (βλ. [Αβρ-ΙΙ]). Προτρέχοντας, παραθέτουμε εδώ ως διευκρινιστικά παραδείγματα τα δύο πλαίσια του σχήματος 3.2.5-19.
ΒΑ καμπύλη
στερεή στήριξη (κινητό πλαίσιο) χαλαρή στήριξη (κινηματικό/χαλαρό πλαίσιο)
( )
καμπύλη
Σχ. 3.2.5-19 Κινητό πλαίσιο ↔ Χαλαρό ή κινηματικό πλαίσιο
Το πλαίσιο Α είναι κινητό - και όχι χαλαρό. Πράγματι, το πλαίσιο Α εδράζεται ισοστατικά και κατά συνέπεια στερεά. Οι αντιδράσεις των στηρίξεών του μπορούν να υπολογιστούν μονοσήμαντα και είναι σαφές ότι τα δομικά στοιχεία του τελούν υπό
3-76
Σ T
A Τ
Ι Κ Η
Ι

ΣΤΑΤΙΚΗ ΤΩΝ ΚΑΤΑΣΚΕΥΩΝ - Τόμος Ι - Θεμελιώδεις αρχές και ισοστατικοί φορείς
ένταση, η οποία προκαλεί σ' αυτά παραμορφώσεις και μετακινήσεις. Αντίθετα, το πλαίσιο Β είναι προφανώς χαλαρό - και όχι κινητό - κατά την οριζόντια διεύθυνση. Η φόρτισή του με οριζόντια φορτία είναι αδύνατη, αφού ελλείψει οριζόντιων δεσμικών ράβδων δεν μπορούν αυτά να μεταφερθούν στο στερεό υπόβαθρο. Με άλλα λόγια: Η οριζόντια μετατόπιση του πλαισίου Β δεν απαιτεί την άσκηση επάνω του κάποιων φορτίων, μπορεί δηλαδή να γίνει άτονα. Είναι τέλος προφανές ότι η οριζόντια χαλαρότητά του πλαισίου αυτού είναι πεπερασμένη.
Δ4. Αποσύζευξη εξισώσεων ισορροπίας Στη γενική περίπτωση, σε κάθε μία από τις έξι/τρεις εξισώσεις ισορροπίας περιέχονται όλες οι άγνωστες αντιδράσεις στήριξης. Αυτό σημαίνει ότι το μητρώο Α των συντελεστών του γραμμικού συστήματος εξισώσεων είναι πλήρως κατειλημμένο, δηλαδή δεν έχει ταινιοειδή μορφή. Επειδή αυτό συνεπάγεται μεγάλο πλήθος αριθμητικών πράξεων κατά την επίλυση, επιδιώκεται η κατάστρωση των εξισώσεων ισορροπίας με τρόπο που σε κάθε εξίσωση να εμφανίζονται όσο το δυνατόν λιγότερες άγνωστες. Αυτό επιτυγχάνεται με χρησιμοποίηση, αντί των έξι/τριών στερεοστατικών συνθηκών (3.2.5-1 / 3.2.5-2), των συνθηκών ισορροπίας των ροπών ως προς κατάλληλα επιλεγμένους άξονες. Η μέγιστη δυνατή απλούστευση κατά τον υπολογισμό των αντιδράσεων στήριξης επιτυγχάνεται, αν βρεθούν έξι/τρεις συνθήκες με μία μόνο άγνωστη η κάθε μια τους, οπότε η αποσύζευξη των εξισώσεων είναι πλήρης. Ακολουθούν ενδεικτικά τα παραδείγματα Δ4-1 και Δ4-2.
Παράδειγμα Δ4-1: Αμφιέρειστη δοκός (βλ. Παράδειγμα Δ1-1, Σχ. 3.2.5-8)
Αποσύζευξη των εξισώσεων ισορροπίας με χρήση συνθηκών ισορροπίας ροπών Αν αντί των συνθηκών ισορροπίας ΣFX=0, ΣFZ=0, ΣΜ(2)=0 που χρησιμοποιήθηκαν στο παράδειγμα Δ1-1 χρησιμοποιήσουμε τις συνθήκες ισορροπίας ΣFX=0, ΣΜ(3)=0, ΣΜ(1)=0, οι τρεις επιλύουσες εξισώσεις παύουν να είναι συζευγμένες και κάθε μία από τις τρεις αντιδράσεις υπολογίζεται από μία ξεχωριστή εξίσωση ανεξάρτητα από τις υπόλοιπες.
Εξισώσεις ισορροπίας:
( )
( ) ( ) ( )
( ) ( ) ( )
⇒
⎪⎪⎭
⎪⎪⎬
⎫
=−⇒=
=+−⇒=
=+−⇒=
••
••
∑∑∑
02LPLA0M3
02LPLA0M2
0PA0F1
ZZ31
ZZ13
XX1X
( )( )( ) 2PA3
2PA2
PA1:Λύση
ZZ3
ZZ1
XX1
=⇒
=⇒
=⇒
Μητρωική διατύπωση:
( )( )
( ) ( )στερεή στήριξη
0LLL1detA:Έλεγχος
0
0
0
2LP
2LP
P
A
A
A
A
L00
0L0
001
2
Z
Z
X
Z3
Z1
X1
→
≠=−−=
=
−
+−
−
••
•
••
4434421
3-77
Σ T
A Τ
Ι Κ Η
Ι

Κεφάλαιο 3. Θεμελιώδεις αρχές της Στατικής των γραμμικών φορέων
Λανθασμένη χρήση συνθηκών ισορροπίας ροπών Όταν αντικαθιστούμε μία συνθήκη ισορροπίας δυνάμεων με μία συνθήκη ισορροπίας ροπών απαιτείται προσοχή προκειμένου οι επιλύουσες εξισώσεις να παραμείνουν γραμμικά ανεξάρτητες. Αν, π.χ., στο αμέσως προηγούμενο παράδειγμα αντικατασταθεί η συνθήκη ισορροπίας δυνάμεων ΣFX=0 από τη συνθήκη ισορροπίας ροπών ΣΜ(2)=0 ως προς το σημείο 2, οι επιλύουσες εξισώσεις καθίστανται γραμμικά εξαρτημένες:
Εξισώσεις ισορροπίας:
( ) ( )
( ) ( )
( ) ( )
⇒
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
=⎟⎠⎞
⎜⎝⎛−⇒=
=⎟⎠⎞
⎜⎝⎛+−⇒=
=⎟⎠⎞
⎜⎝⎛+⎟
⎠⎞
⎜⎝⎛−⇒=
••
••
••
∑
∑
∑
02LPLA0M3
02LPLA0M2
02LA
2LA0M1
ZZ31
ZZ13
Z3Z12
Μητρωική διατύπωση:
( )
( )
0!detA:Έλεγχος
0
0
0
2LP
2LP
0
A
A
A
A
L0 0
0L0
2L2L0
Z
Z
Z3
Z1
X1
=
=
−
+−
−
•
••
44 344 21
Η ατυχής αυτή επιλογή εξισώσεων ισορροπίας οδηγεί στον μηδενισμό της ορίζουσας detΑ του μητρώου Α των συντελεστών των αγνώστων αντιδράσεων, παρόλο που - όπως γνωρίζουμε - ο φορέας εδράζεται στερεά. Στην προκειμένη περίπτωση η αντίδραση ΑX1 δεν μπορεί να υπολογιστεί, αφού δεν υπεισέρχεται ως άγνωστο μέγεθος σε καμία εξίσωση. Προσεκτική παρατήρηση των τριών εξισώσεων μας δείχνει ότι η εξίσωση (1) είναι γραμμικός συνδυασμός των εξισώσεων (2) και (3), ότι δηλαδή οι εξισώσεις είναι γραμμικά εξαρτημένες. Αν αντί της συνθήκης ΣΜ(2)=0 χρησιμοποιήσουμε τη συνθήκη ισορροπίας ροπών ΣΜ(4)=0 περί το σημείο 4 (βλ. Σχ. 3.2.5-8):
( ) ( ) 02LPHPLAHA0M ZXZ1X14 =++−−⇒= ••••∑
Παίρνουμε και πάλι ένα σύστημα γραμμικά ανεξάρτητων και πρακτικά αποσυζευγμένων εξισώσεων:
Μητρωική διατύπωση:
( )
( )
( )
( )
( )
( )
( ) ( ) στερεή στήριξη 0LHLLHdetA:Έλεγχος
3
2
1
0
0
0
2LP
2LP
2LPHP
A
A
A
A
L00
0L0
0LH
2
Z
Z
ZX
Z3
Z1
X1
→≠=−−=
=
−
+
+−
−−
•••
•
•
••
•
4434421
( )
( )
( ) ( )[ ] ( )( ) ( )( ) XZXZZXZ1X1
ZZ1
ZZ3
PH2LPPH2LPH2LPHPLAA1
2PA2
2PA3:Λύση
=++−=++−=⇒
=⇒
=⇒
•••••••
3-78
Σ T
A Τ
Ι Κ Η
Ι

ΣΤΑΤΙΚΗ ΤΩΝ ΚΑΤΑΣΚΕΥΩΝ - Τόμος Ι - Θεμελιώδεις αρχές και ισοστατικοί φορείς
Παράδειγμα Δ4-2: Αμφιέρειστη δοκός με κεκλιμένη κύλιση στο δεξιό άκρο Μία απλή περίπτωση εύστοχης επιλογής των συνθηκών ισορροπίας, έτσι ώστε να προκύψουν ανεξάρτητες και αποσυζευγμένες επιλύουσες εξισώσεις, δίνεται στο ακόλουθο σχήμα 3.2.5-20.
1
2
3
12
3
L/2 L/2
PZPX
Δεδομένος φορέας
PZPX
Κυκλική διαχωριστική τομήκαι κατάλυσ νδέσμων
Διάγραμμα ελεύθερου σώματος
XZ
•4
L/tgα
η συ
flfl
1 3ZPX
2
P
•4
L/tgα
AZ1
AX1
α
α
•
L cosα•
Β
Αποσυζευγμένες συνθήκες ισορροπίας ροπών:
( ) ( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( ) ( )
( )⇓
=−
+−⇒=
=+−⇒=
=−⇒=
•
••
••
•••
∑∑∑
02LP
tgαLPtgαLA0M3
02LPLA0M2
02LPcosαLB0M1
Ζ
ΧΧ14
ZZ13
Ζ1
Μητρωική διατύπωση:
( ) ( ) ( )( ) στερεή στήριξη 0tgαcosαL
tgαLLcosαLdetA:Έλεγχος
0
0
0
2LP
tgαLP
2LP
2LP
B
A
A
A
00tgαL
0L0
cosαL00
3
ZX
Z
Z
Z1
X1
→≠=
−−=
=
−
−
+
−
−
•
•••
••
•
•
•
•
444 3444 21
( ) ( )
( )
( ) ( )2tgαPPA3
2PA2
cosα2PB1:Λύση
ZXΧ1
ZZ1
Ζ
•
•
−=⇒
=⇒
=⇒
Σχ. 3.2.5-20 Ισοστατική στήριξη δοκού στο επίπεδο
3-79
Σ T
A Τ
Ι Κ Η
Ι

Κεφάλαιο 3. Θεμελιώδεις αρχές της Στατικής των γραμμικών φορέων
Δ5. Ειδικές περιπτώσεις φόρτισης φορέων με χαλαρή στήριξη Σε ορισμένες περιπτώσεις χαλαρής στήριξης ενός φορέα είναι δυνατός ο υπολογισμός ορισμένων αντιδράσεων στήριξης, αν τα δρώντα επάνω στον φορέα φορτία είναι τέτοια ώστε να μην δημιουργούν γραμμικές εξαρτήσεις στις συνθήκες ισορροπίας.
Παράδειγμα Δ5-1: Υπολογισμός αντιδράσεων χαλαρά εδραζόμενης δοκού Για τη χαλαρά εδραζόμενη δοκό του σχήματος 3.2.5-21(α) (Σημ: Με δύο μόνο δεσμικές ράβδους δεν επιτυγχάνεται στερεή στήριξη στο επίπεδο), η οποία φορτίζεται με μία μόνο αξονική δύναμη ΡΧ, οι δύο αντιδράσεις ΑΧ και ΑΖ υπολογίζονται μονοσήμαντα από τις δύο συνθήκες ισορροπίας δυνάμεων χωρίς πρόβλημα. Ως δομικός φορέας η δοκός αυτή είναι βέβαια άχρηστη, διότι υπό οποιαδήποτε άλλη μη αξονική φόρτιση (π.χ. για κατακόρυφο φορτίο ΡΖ, βλ. Σχ. 3.2.5-21(β)) καταρρέει. Η αντίφαση που προκύπτει κατά τον υπολογισμό της ΑΖ1 λόγω του κατακορύφου φορτίου ΡΖ σημαίνει ότι ο δεδομένος φορέας είναι χαλαρός (Σημ.: Είναι δυνατή η πεπερασμένη περιστροφή της δοκού περί το σημείο 1) και ότι τότε μόνο ισορροπεί, όταν τα φορτία του δεν προκαλούν ροπές ως προς το σημείο 1, δηλαδή όταν φορτίζεται αποκλειστικά με αξονικά φορτία ΡΧ, qΧ.
Εξισώσεις ισορροπίας:
( )( )( ) ( )
ταιυπολογίζονςαντιδράσει Οι
0A0LA0M3
0A0A0F2
PA0PA0F1
Z1Z12
Z1Z1Z
XX1XX1X
=⇒=−⇒=
=⇒=−⇒=
=⇒=+−⇒=
•∑∑
φορέα.χαλαρούτουφόρτιση νησυγκεκριμέτηγιααμονοσήμαντ
∑
1 2
LPX
Δεδομένος φορέας
1
Κυκλική διαχωριστική τομήAZ1
AX1
fl
και κατάλυση συνδέσμων
1A Z1
AX1
Διάγραμμα ελεύθερου σώματος
XZ
2
PX
2 PX
(α)
(β)
fl
2
PΖ1
AZ1
A X1
Διάγραμμα ελεύθερου σώματος
Εξισώσεις ισορροπίας:
( )( )( ) ( )
( )
Ζ1
ZZ1
Z1Z12
ZZ1ZZ1Z
X1X1X
Ατης υπολογισμό στον Αντίφαση
0P0LP0Mή
0A0LA0M3
PA0PA0F2
0A0A0F1
=⇒=−⇒=
=⇒=−⇒=
=⇒=+−⇒=
=⇒=−⇒=
•
•
∑∑∑∑
Σχ. 3.2.5-21 Αντιδράσεις χαλαρά εδραζόμενης δοκού
3-80
Σ T
A Τ
Ι Κ Η
Ι

ΣΤΑΤΙΚΗ ΤΩΝ ΚΑΤΑΣΚΕΥΩΝ - Τόμος Ι - Θεμελιώδεις αρχές και ισοστατικοί φορείς
Παράδειγμα Δ5-2: Υπολογισμός αντιδράσεων χαλαρά εδραζόμενης δοκού με οριζοντίως υπερστατική στήριξη Παρομοίως, για τη χαλαρά εδραζόμενη δοκό του σχήματος 3.2.5-22(α) (Σημ: Οι άξονες των δεσμικών της ράβδων τέμνονται σε ένα σημείο), η οποία φορτίζεται με τη μοναχική δύναμη ΡΧ και με το συνεχές φορτίο q, η αντίδραση ΑΖ2 υπολογίζεται άμεσα από τη συνθήκη ισορροπίας των κατακορύφων δυνάμεων. Αντίθετα, για τις δύο οριζόντιες αντιδράσεις ΑΧ1 και ΑΧ3 διατίθεται μία μόνο εξίσωση ισορροπίας και συνεπώς οι αριθμητικές τους τιμές παραμένουν απροσδιόριστες (οριζοντίως υπερστατική στήριξη). Και αυτή η δοκός, όπως και η προηγούμενη, είναι άχρηστη ως δομικός φορέας, διότι υπό άλλες φορτίσεις (π.χ. υπό το μοναχικό φορτίο ΡΖ, Σχ. 3.2.5-22(β)) καταρρέει, όπως αριθμητικά υποδηλώνεται από την προκύπτουσα αντίφαση κατά τον υπολογισμό της ΑΖ2.
Εξισώσεις ισορροπίας:
( ) ( )
Lq2A
0L2qA0F1
Z2
Z2Z
••
••
=⇒
=+−⇒=
( )
( ) ( ) ( )
Lq2A
0LL2qLA0M3
0PAA0F2
Z2
Z21
XX3X1X
••
••••
=⇒
=−⇒=
=+−−⇒=
∑∑
∑
PX AΖ2
AΧ1
AΧ3
3
AΖ2
21
L/2 L/2
(α)
(β)
1 2 3L
Δεδομένος φορέας
Κυκλική διαχωριστική τομήκαι κατάλυση συνδέσμων
XZ
q
flfl
PZ
PX
L
q
PX
q
21
3
1 2 3
Διάγραμμα ελεύθερου σώματος
Εξισώσεις ισορροπίας:
( )
( ) ( ) ( )
2PA
02LPLA0M2
PA0PA0F1
ZZ2
ZZ21
ZZ2ZZ2Z
=⇒
=−⇒=
=⇒=+−⇒=
••∑∑
Αντίφαση!
Σχ. 3.2.5-22 Αντιδράσεις χαλαρά εδραζόμενης δοκού με οριζοντίως υπερστατική στήριξη
3-81
Σ T
A Τ
Ι Κ Η
Ι

Κεφάλαιο 3. Θεμελιώδεις αρχές της Στατικής των γραμμικών φορέων
Ε. Υπολογιστικός έλεγχος της στερεότητας στήριξης ενός δίσκου/σώματος Στην παράγραφο 3.2.4 περιγράφηκε ένας εποπτικός τρόπος ελέγχου της στερεότητας της στήριξης ενός επίπεδου ή χωρικού φορέα (θεωρώντας τον ως απολύτως στερεό δίσκο ή σώμα) ανεξάρτητα από τα φορτία του, με βάση σχετικά απλούς γεωμετρικούς συλλογισμούς και χωρίς τη διενέργεια υπολογισμών. Σύμφωνα με τον εποπτικό αυτόν τρόπο ελέγχου, εξετάζεται κατά πόσο οι δρομικές και στροφικές δεσμικές ράβδοι που συνδέουν τον φορέα με το στερεό υπόβαθρο αποκλείουν όλους τους βαθμούς ελευθερίας του στο επίπεδο ή στον χώρο αντίστοιχα. Στην προηγούμενη υποπαράγραφο 3.2.5-Γ είδαμε όμως ότι η στερεότητα στήριξης ενός φορέα μπορεί να ελεγχθεί και μέσω του υπολογισμού των αντιδράσεων στήριξής του. Συνδυάζοντας όλα όσα εξετέθησαν στην υποπαράγραφο 3.2.5-Γ σε συνδυασμό με τις αναπτύξεις της προηγουμένης παραγράφου 3.2.4 μπορούμε να διατυπώσουμε τις ακόλουθες προτάσεις (Σχ. 3.2.5-23):
Αν οι αντιδράσεις στήριξης μπορούν να υπολογιστούν μονοσήμαντα από τις συνθήκες ισορροπίας (έξι στον χώρο, τρεις στο επίπεδο), τότε η στήριξη χαρακτηρίζεται ως στατικά ορισμένη ή ισοστατική και είναι στερεή (κινηματικά ευσταθής). Ταυτόχρονα είναι και κινηματικά ορισμένη, δηλαδή περιλαμβάνει ακριβώς έξι δεσμικές ράβδους στήριξης στον χώρο ή τρεις στο επίπεδο. Ο μονοσήμαντος προσδιορισμός των αντιδράσεων στήριξης από τις συνθήκες ισορροπίας προϋποθέτει ότι η ορίζουσα detA του γραμμικού συστήματος εξισώσεων ισορροπίας είναι διάφορη του μηδενός (detA≠0).
Αν οι αντιδράσεις στήριξης είναι μεν ακριβώς όσες και οι διαθέσιμες συνθήκες ισορροπίας, αλλά η ορίζουσα του μητρώου Α των συντελεστών των αγνώστων είναι μηδενική (detA=0), τότε η επίλυση του συστήματος δεν είναι μονοσήμαντα δυνατή. O μηδενισμός της ορίζουσας οφείλεται σε υφιστάμενες γραμμικές εξαρτήσεις μεταξύ των εξισώσεων, πράγμα που σημαίνει ότι δεν δεσμεύονται όλοι οι βαθμοί ελευθερίας του φορέα, δηλαδή ότι η διάταξη των δεσμικών ράβδων είναι τέτοια που επιτρέπει απειροστή ή και πεπερασμένη μετακίνηση του φορέα χωρίς ταυτόχρονη ανάπτυξη αντιδράσεων στήριξης και γενικότερα έντασης. Στην περίπτωση αυτή η στήριξη είναι χαλαρή (κινηματικά ασταθής) και κινηματικά υποορισμένη. Το ίδιο ισχύει και στην περίπτωση που η στήριξη του φορέα γίνεται με λιγότερες των έξι ή τριών δεσμικών ράβδων στον χώρο ή στο επίπεδο αντίστοιχα. Στις παραπάνω περιπτώσεις η στήριξη μπορεί να χαρακτηριστεί και ως στατικά υπερορισμένη.
3-82
Σ T
A Τ
Ι Κ Η
Ι

ΣΤΑΤΙΚΗ ΤΩΝ ΚΑΤΑΣΚΕΥΩΝ - Τόμος Ι - Θεμελιώδεις αρχές και ισοστατικοί φορείς
Αν οι m αντιδράσεις στήριξης είναι περισσότερες από έξι στον χώρο ή τρεις στο επίπεδο, οι διαθέσιμες συνθήκες ισορροπίας (που είναι έξι στον χώρο, τρεις στο επίπεδο) δεν επαρκούν για τον μονοσήμαντο προσδιορισμό τους και η στήριξη χαρακτηρίζεται ως στατικά υποορισμένη ή στατικά αόριστη ή υπερστατική. Μια υπερστατική στήριξη είναι στερεή, αν μεταξύ των m>6 (m>3) δεσμικών ράβδων της υπάρχουν έξι (τρεις) που εξασφαλίζουν τη στερεότητά της. Σε αντίθετη περίπτωση η υπερστατική στήριξη είναι χαλαρή.
Στήριξη
στερεή ή κινηματικά ευσταθής χαλαρή ή κινηματικά ασταθής
κινηματικά υποορισμένηκινηματικά ορισμένηØ στατικά ορισμένη
ή ισοστατική(det∫0)
ή στατικά αόριστηστατικά υποορισμένη
κινηματικά υπερορισμένηØ
ή υπερστατική(det=0)
στατικά υπερορισμένηØ
απειροστήκινητότητα κινητότητα
πεπερασμένη
Σχ. 3.2.5-23 Ισοστατικές, υπερστατικές και χαλαρές στηρίξεις ενός απολύτως στερεού δίσκου ή σώματος
Μία σειρά ασκήσεων που αφορούν στον υπολογισμό των αντιδράσεων στήριξης και στον υπολογιστικό έλεγχο της κινηματικής ευστάθειας δίνεται στον τόμο Ια του παρόντος συγγράμματος ([Αβρ-Ια], Ασκήσεις της Σειράς Β).
3-83
Σ T
A Τ
Ι Κ Η
Ι

Κεφάλαιο 3. Θεμελιώδεις αρχές της Στατικής των γραμμικών φορέων
3.2.6 Εσωτερικά εντασιακά μεγέθη γραμμικών φορέων Τα εξωτερικά φορτία που ασκούνται επάνω σε έναν στερεά εδραζόμενο δομικό φορέα 'μεταφέρονται' μέσω των επιμέρους δομικών του στοιχείων στις στηρίξεις του και μέσω αυτών στο έδαφος θεμελίωσης (στερεό υπόβαθρο). Κατά τη 'μεταφορά' αυτή τα δομικά στοιχεία του φορέα υφίστανται, όπως εκ πείρας γνωρίζουμε, ορισμένες παραμορφώσεις και επομένως μπορούμε εύλογα να συμπεράνουμε ότι μέσα τους αναπτύσσονται εσωτερικές εντάσεις. Ο προσδιορισμός των εσωτερικών αυτών εντάσεων είναι απαραίτητος προκειμένου να ελέγξουμε την αντοχή του φορέα, δηλαδή να ελέγξουμε αν τα δομικά υλικά από τα οποία είναι κατασκευασμένος ο φορέας μπορούν να αντέξουν στην εσωτερική ένταση που προκαλούν τα εξωτερικά φορτία. Ποιες είναι λοιπόν αυτές οι εσωτερικές εντάσεις και πώς μπορούμε να τις υπολογίσουμε; Για τον σκοπό αυτόν χρησιμοποιείται η μέθοδος των νοητών διαχωριστικών τομών.
Α. Η μέθοδος των διαχωριστικών τομών Η μέθοδος των νοητών διαχωριστικών τομών (ή απλά: των διαχωριστικών τομών) βασίζεται σε μια πολύ απλή - και γι΄αυτό μεγαλοφυή - ιδέα που ανάγεται στον Euler1 και συνιστά γενίκευση της αρχής της αποδέσμευσης του Lagrange (βλ. παράγρ. 3.2.5-Γ). Όπως κατά την αποδέσμευση ενός φορέα από το στερεό υπόβαθρο με κατάλυση των δεσμικών ράβδων που τον στηρίζουν 'εμφανίζονται στο προσκήνιο' (γίνονται 'ορατές') οι εντάσεις των δεσμικών αυτών ράβδων, δηλαδή οι αντιδράσεις στήριξης, και καθίσταται δυνατός ο υπολογισμός τους με τις συνθήκες ισορροπίας, έτσι και με τη μέθοδο των νοητών διαχωριστικών τομών καταλύονται εσωτερικοί δεσμοί σε συγκεκριμένες θέσεις των δομικών στοιχείων και γίνονται 'ορατές' οι εσωτερικές εντάσεις που επικρατούν στα σημεία αυτά, επιτρέποντάς μας έτσι να τις υπολογίσουμε χρησιμοποιώντας και πάλι τις συνθήκες ισορροπίας. Η μέθοδος των νοητών διαχωριστικών τομών αποτελεί μία θεμελιώδους σημασίας και μεγάλης πρακτικής χρησιμότητας μεθοδολογική διαδικασία υπολογισμού των εσωτερικών εντασιακών μεγεθών όχι μόνο στη Στατική, αλλά και στη Δυναμική των Κατασκευών. Ας θεωρήσουμε έναν τυχόντα δομικό φορέα που βρίσκεται σε κατάσταση ισορροπίας υπό την επενέργεια των εξωτερικών φορτίων, υφιστάμενος βέβαια ορισμένες παραμορφώσεις (Σχ. 3.2.6-1(α)). Αν στη συνέχεια με δύο νοητές διαχωριστικές τομές στα σημεία i και j αποσπάσουμε ένα οποιοδήποτε τμήμα i-j, διαπιστώνουμε ότι τα εξωτερικά φορτία Fb και Fc που απέμειναν στο τμήμα αυτό δεν εξισορροπούνται πλέον μεταξύ τους και κατά συνέπεια το τμήμα αυτό δεν είναι καταρχάς δυνατόν να ισορροπεί (Σχ. 3.2.6-1(β)). Όμως το αποσπασθέν τμήμα i-j, όταν ακόμη αποτελούσε τμήμα του αρχικού φορέα, δηλαδή πριν τη νοητή απόσπασή του από αυτόν, ισορροπούσε, μολονότι έφερε τα ίδια εξωτερικά φορτία 1 LEONHARD EULER (1707-1783), μεγάλος Ελβετός μαθηματικός με σημαντικές συνεισφορές σε πολλά πεδία της Φυσικής και στη Μηχανική. Μπορεί να θεωρηθεί ως θεμελιωτής της Στερεομηχανικής και της τεχνικής θεωρίας κάμψης δοκών.
3-84
Σ T
A Τ
Ι Κ Η
Ι

ΣΤΑΤΙΚΗ ΤΩΝ ΚΑΤΑΣΚΕΥΩΝ - Τόμος Ι - Θεμελιώδεις αρχές και ισοστατικοί φορείς
Fb και Fc. Από την σκέψη αυτή προκύπτει το συμπέρασμα ότι στις διατομές i και j, δηλαδή στις επιφάνειες Ai και Aj των άκρων i και j του αποσπασθέντος τμήματος, πρέπει να ασκούνται από τον εναπομένοντα φορέα εσωτερικές δυνάμεις ή τάσεις, οι οποίες εξισορροπούν τα εξωτερικά του φορτία (Σχ. 3.2.6-1(γ)). Διαπιστώνουμε λοιπόν ότι το αποσπασθέν τμήμα i-j με τα εξωτερικά φορτία που δρουν επάνω του βρίσκεται σε κατάσταση ισορροπίας, αν στις επιφάνειες τομής Ai και Aj προσαχθούν ως εξωτερικές δυνάμεις εκείνες οι εσωτερικές δυνάμεις, τις οποίες ασκούσε ο υπόλοιπος φορέας σ' αυτό πριν από τη νοητή του απόσπαση. Επιπλέον, λόγω του 3ου αξιώματος του Νεύτωνα (actio=reactio), θα ασκούνται ίσες και αντίθετες δυνάμεις και από το τμήμα i-j επάνω στον υπόλοιπο φορέα. Τέλος, εφόσον στο τμήμα i-j ασκούνται πριν και μετά την απόσπασή του οι ίδιες ακριβώς δυνάμεις, οι παραμορφώσεις του τμήματος i-j υπό την επίδραση αυτών των δυνάμεων θα είναι ακριβώς οι ίδιες. Η παραπάνω διαδικασία χαρακτηρίζεται ως μέθοδος των νοητών διαχωριστικών τομών. Τονίζεται ότι δεν πρόκειται απλά για μεμονωμένες τομές σε συγκεκριμένα σημεία του φορέα, αλλά για κλειστές διαχωριστικές τομές (κυκλικές σε επίπεδους και σφαιρικές σε χωρικούς φορείς), μέσω των οποίων αποσπάται ένα τμήμα του φορέα συμπεριλαμβανομένων και όλων των εξωτερικών φορτίων τα οποία αυτό φέρει. Με νοητές τομές μπορούμε βέβαια να αποσπάσουμε όχι μόνον τμήματα του φορέα από τον υπόλοιπο φορέα, αλλά και ολόκληρο τον φορέα από τις στηρίξεις του. Στην περίπτωση αυτή η κυκλική/σφαιρική τομή τέμνει τις αντίστοιχες δεσμικές ράβδους στήριξης και οι εσωτερικές δυνάμεις που δρουν στις επιφάνειες των τομών είναι οι αντιδράσεις των στηρίξεων του φορέα. Το σκεπτικό αυτό χρησιμοποιήθηκε στην ουσία του, όπως είδαμε στην προηγούμενη παράγραφο, από τον Lagrange για τον υπολογισμό των αντιδράσεων ενός φορέα (αρχή της αποδέσμευσης του Lagrange). Επειδή το αποσπασθέν τμήμα του φορέα μαζί με όλα τα εξωτερικά φορτία και όλες τις εσωτερικές δυνάμεις στις επιφάνειες τομής δεν έχει πλέον κινηματικές δεσμεύσεις (στηρίξεις), χαρακτηρίζεται, όπως και στην περίπτωση της αποδέσμευσης του φορέα από τις στηρίξεις του, ως ελεύθερο σώμα (βλ. παράγρ. 3.2.5-Γ) . Το σύνολο των δυνάμεων που ασκούνται επάνω σ' ένα ελεύθερο σώμα χαρακτηρίζεται και εδώ ως διάγραμμα ελευθέρου σώματος. Οι εσωτερικές δυνάμεις ή τάσεις που δρουν επάνω στην επιφάνεια της δοκού αριστερά ή δεξιά μιας νοητής τομής i θεωρούμε ότι είναι συνεχώς κατανεμημένες σε όλη την επιφάνεια αποτελώντας έτσι ένα γενικό σύστημα δυνάμεων (βλ. παράγρ. 3.2.3-Γ), οι οποίες για τυχούσα φόρτιση του φορέα έχουν γενικώς ανομοιόμορφη κατανομή. Σύμφωνα με την παράγραφο 3.2.3-Γ, το γενικό αυτό σύστημα των εσωτερικών δυνάμεων μπορεί να αναχθεί σε ένα κεντρικό σύστημα δυνάμεων που δρουν στο κέντρο βάρους της διατομής με συνισταμένη Ri και σε ένα σύστημα ροπών ως προς συγκεκριμένο άξονα με συνισταμένη Μi. Οι συνισταμένες αυτών των δυνάμεων και ροπών ονομάζονται εσωτερικά μεγέθη έντασης ή φορτία διατομής (Σχ. 3.2.6-1(γ)). Ο προσδιορισμός τους σε οποιαδήποτε διατομή i ενός δομικού φορέα αποτελεί κεντρικό πρόβλημα της Στατικής των Κατασκευών, ενώ ο
3-85
Σ T
A Τ
Ι Κ Η
Ι

Κεφάλαιο 3. Θεμελιώδεις αρχές της Στατικής των γραμμικών φορέων
προσδιορισμός της κατανομής των εσωτερικών τάσεων μέσα στη διατομή αποτελεί ειδικότερο αντικείμενο της Αντοχής Υλικών.
(α)
(β)
Fa
i j
(γ)
Μ i
Rj
Συνισταμένες των εσωτερικών τάσεων
Fb Fc
Fb Fc
Fa
Fb Fc
Fa
Ri
Μ j
RjRi
Μi Μ j
Σχ. 3.2.6-1 Η μέθοδος των νοητών τομών: (α) Φορέας σε κατάσταση ισορροπίας,
(β) Απόσπαση τμήματος i-j και εσωτερικές τάσεις, (γ) Συνισταμένες Ri, Μi και Rj, Μj των εσωτερικών τάσεων (φορτία διατομής i και διατομής j)
3-86
Σ T
A Τ
Ι Κ Η
Ι

ΣΤΑΤΙΚΗ ΤΩΝ ΚΑΤΑΣΚΕΥΩΝ - Τόμος Ι - Θεμελιώδεις αρχές και ισοστατικοί φορείς
Β. Τα φορτία διατομής γραμμικών στοιχείων Β1. Ορισμοί
Ενώ για τον χαρακτηρισμό (διεύθυνση και φορά) των εξωτερικών εντασιακών μεγεθών (φορτίων και αντιδράσεων) θα μπορούσε να αρκέσει ένα μόνο σύστημα αναφοράς (το καθολικό καρτεσιανό σύστημα αναφοράς), ο ορισμός των εσωτερικών εντασιακών μεγεθών απαιτεί την εισαγωγή ενός τοπικού συστήματος αναφοράς σε κάθε σημείο του άξονα του γραμμικού στοιχείου, ο οποίος στη γενική περίπτωση είναι καμπύλος. Θεωρούμε ότι ο τοπικός άξονας x εφάπτεται πάντα στον κεντροβαρικό άξονα του στοιχείου και ότι οι τοπικοί άξονες y και z συμπίπτουν με τους κύριους άξονες της κάθε διατομής. Εφόσον το γραμμικό στοιχείο είναι ευθύγραμμο, ο άξονας x του τοπικού συστήματος αναφοράς συμπίπτει με τον κεντροβαρικό άξονα του στοιχείου σε όλο το μήκος του στοιχείου (βλ. και παράγρ. 3.2.5-Α). Θεωρούμε τώρα μία δοκό ενός γραμμικού χωρικού φορέα, ο οποίος βρίσκεται σε ισορροπία υπό την επίδραση εξωτερικών φορτίων, και την τέμνουμε νοερά σε ένα τυχαίο σημείο i κάθετα στον κεντροβαρικό της άξονα x (Σχ. 3.2.6-2). Σύμφωνα με τα όσα αναφέρθηκαν στην προηγούμενη υποπαράγραφο Α, τα δύο τμήματα της δοκού εκατέρωθεν της τομής θα εξακολουθήσουν να ισορροπούν, εφόσον στις δύο επιφάνειες της τομής, την αριστερή ή θετική όχθη και τη δεξιά ή αρνητική όχθη, προσαχθούν εν είδει εξωτερικών φορτίων οι εσωτερικές τάσεις που υπήρχαν εκεί πριν από τη διενέργεια της τομής. Προφανώς, οι εσωτερικές αυτές τάσεις είναι ίσες και αντίθετες στις δύο όχθες της τομής, διότι κατά την 'επανασυγκόλληση' των δύο οχθών θα πρέπει να αλληλοεξουδετερωθούν.
xσ ( sy , szs
)xzτ ( sy , sz )
xyτ ( sy , sz )
yd
zd
ys
zs
yQyM
zQ
zM
∏
∏
Mi∏ x
y z
NxM
x
N
Qy
My
Mz
Qz
∏
s
∏
Σχ. 3.2.6-2 Τα έξι φορτία διατομής ενός γραμμικού στοιχείου (δοκού) στον χώρο ως
συνισταμένες των αναπτυσσομένων στη διατομή ορθών και διατμητικών τάσεων - Ορισμός της συμβατικά θετικής τους φοράς ('Σύμβαση προσήμων')
3-87
Σ T
A Τ
Ι Κ Η
Ι

Κεφάλαιο 3. Θεμελιώδεις αρχές της Στατικής των γραμμικών φορέων
Οι εσωτερικές τάσεις αναλύονται σε κάθε σημείο της κάθε επιφάνειας τομής σε τρεις συνιστώσες : την ορθή τάση σx, που είναι κάθετη στην επιφάνεια τομής, και τις δύο διατμητικές τάσεις τxy, τxz, που είναι παράλληλες με την επιφάνεια τομής. Οι τιμές των τάσεων διαφέρουν στη γενική περίπτωση από σημείο σε σημείο της διατομής, είναι δηλαδή συναρτήσεις των συντεταγμένων y και z, και θεωρούνται θετικές όταν η φορά τους συμπίπτει με τη φορά των αξόνων του τοπικού συστήματος αναφοράς x, y, z. Όπως ήδη αναφέρθηκε πιο επάνω, στη Στατική μας ενδιαφέρουν κυρίως οι συνισταμένες των εσωτερικών τάσεων, οι οποίες χαρακτηρίζονται ως φορτία διατομής και αποτελούν τα εσωτερικά μεγέθη έντασης των γραμμικών στοιχείων. Τα φορτία διατομής για ένα γραμμικό στοιχείο στον χώρο ορίζονται ως εξής (Σχ. 3.2.6-2):
(3.2.6-1)
(3.2.6-2)
(3.2.6-3)
( )∫∫∫
∫∫∫
•••
••••
••
•
=
−==
==
=
Α xyxzx
Α xzΑ xy
Α xzzΑ xyy
Α x
dAzτ-yτM:στρέψης ροπή
dAyσM dA,zσM:κάμψης ροπές
dAτQ ,dAτQ:δυνάμεις τέμνουσες
dAσΝ:δύναμη αξονική
(3.2.6-4)
Β2. Συμβατικά θετικές φορές των εσωτερικών εντασιακών μεγεθών Παρατηρούμε ότι σύμφωνα με τους παραπάνω ορισμούς όλα τα φορτία διατομής στην αριστερή όχθη μιας τομής θεωρούνται θετικά, όταν το διάνυσμά τους έχει την ίδια φορά με τη φορά του εκάστοτε άξονα συντεταγμένων x, y, z (βλ. Σχ. 3.2.6-2). Η επιλογή αυτή δεν είναι βέβαια υποχρεωτική και ο ορισμός των θετικών φορτίων διατομής θα μπορούσε να γίνει και διαφορετικά. Προφανώς πρόκειται για μια σύμβαση, την οποία, από τη στιγμή που την αποδεχόμαστε, οφείλουμε να τηρούμε με απόλυτη συνέπεια προς αποφυγή λαθών. Είναι σαφές ότι η σύμβαση προσήμων για τα φορτία διατομής δεν επηρεάζει σε τίποτε την ουσία του εξεταζόμενου προβλήματος, όπως π.χ. δεν αλλάζει το μήκος μιας δοκού αν το μετρήσουμε σε μέτρα ή σε ίντσες. Στο σημείο αυτό υπενθυμίζεται ότι ο γεωμετρικά εξιδανικευμένος γραμμικός φορέας αντιπροσωπεύεται και παριστάνεται από τους κεντροβαρικούς άξονες των στοιχείων του (βλ. παράγρ. 2.2.1) και ότι ο κεντροβαρικός (ή ουδέτερος) άξονας ενός γραμμικού στοιχείου είναι εν γένει διαφορετικός από τον διατμητικό άξονα (Σύγκρ. τα σχετικά με το κεντροβαρικό φορτιστικό προσομοίωμα στην παράγραφο 3.2.5-Α). Σε περιπτώσεις γραμμικών στοιχείων στα οποία το κέντρο βάρους της διατομής δεν συμπίπτει με το κέντρο διάτμησης, όπως π.χ. μπορεί να συμβαίνει σε μη διπλά συμμετρικές λεπτότοιχες διατομές από χάλυβα, η μεν ορθή δύναμη και οι ροπές κάμψης θα πρέπει να αναφέρονται στον κεντροβαρικό άξονα, οι δε τέμνουσες δυνάμεις και η ροπή στρέψης στον άξονα διάτμησης.
3-88
Σ T
A Τ
Ι Κ Η
Ι

ΣΤΑΤΙΚΗ ΤΩΝ ΚΑΤΑΣΚΕΥΩΝ - Τόμος Ι - Θεμελιώδεις αρχές και ισοστατικοί φορείς
Εφόσον η διατομή είναι διπλά συμμετρική (π.χ. μεταλλική διατομή διπλού ταυ ή συμπαγής ορθογωνική διατομή οπλισμένου σκυροδέματος), οι δύο αυτοί άξονες συμπίπτουν, και επομένως όλα τα φορτία νοούνται ως δρώντα επάνω στον κεντροβαρικό (ουδέτερο) άξονα του γραμμικού προσομοιώματος. Στο παρόν σύγγραμμα θεωρούμε γενικώς ότι οι δύο άξονες συμπίπτουν και ότι όλα τα φορτία διατομής δρουν επάνω στον κεντροβαρικό άξονα του γραμμικού προσομοιώματος του φορέα. Ας δούμε τώρα την ειδικότερη περίπτωση των γεωμετρικά επίπεδων φορέων (βλ. παράγρ. 2.5.1), των οποίων όλα τα δομικά στοιχεία βρίσκονται μέσα στο επίπεδο, π.χ. στο επίπεδο Χ-Ζ. Αν ένας τέτοιος επίπεδος φορέας φορτίζεται με φορτία που προκαλούν αποκλειστικά ενδοεπίπεδες παραμορφώσεις/μετακινήσεις (δηλαδή με δυνάμεις FΧ, FZ, pΧ, pΖ και με ροπές MY, mY), τότε στα δομικά στοιχεία του φορέα αναπτύσσονται μόνο τα φορτία διατομής Μy, Qz και Ν, ενώ τα υπόλοιπα (Qy, Μz, Μx) είναι μηδενικά. Στην περίπτωση αυτή, παραλείπονται συχνά οι δείκτες προσανατολισμού στα μεγέθη έντασης, δηλαδή γράφουμε Μ αντί Μy, Q αντί Qz, σ αντί σx και τ αντί τxz. Σε περίπτωση που γεωμετρικά επίπεδοι φορείς, όπως π.χ. οι εσχάρες δοκών, φορτίζονται με δυνάμεις κάθετες στο επίπεδό τους (δηλαδή με FΥ, pΥ για φορείς εντός του επιπέδου Χ-Ζ), τότε στα δομικά τους στοιχεία αναπτύσσονται και ροπές στρέψης Μx, που συχνά συμβολίζονται ως ΜΤ (από τo αρχικό γράμμα της αγγλικής λέξης Τorsion). Εφόσον αναφερόμαστε στα φορτία διατομής σε μια συγκεκριμένη διατομή i, τα μεγέθη έντασης χαρακτηρίζονται με τον δείκτη i (Σχ. 3.2.6-3 (α)).
("αριστερό")
αναφοράςσύστημαΤοπικό i (σημείο τομής)
∏ ∏y x
ίνα αναφοράς
άκρο 1
z
Mi
QiNi MTi
MTiiNQzi
yiM∏
NiTiM
ziQ
iQ
iM
TiM iN
ίνα αναφοράς
άκρο 2("δεξιό")
yiM(α)
(β)
Σχ. 3.2.6-3 Σύμβαση προσήμων για γεωμετρικά επίπεδους φορείς στο επίπεδο X-Z:
Ορισμός (α) των θετικών εσωτερικών εντασιακών μεγεθών στη διατομή i ενός ευθύγραμμου στοιχείου και (β) της ίνας αναφοράς
Τέλος, στη γενική περίπτωση που ένας επίπεδος φορέας φορτίζεται με τυχούσες δυνάμεις και ροπές εντός και εκτός του επιπέδου στο οποίο είναι τοποθετημένος, στα δομικά του στοιχεία αναπτύσσονται και τα έξι εσωτερικά εντασιακά μεγέθη (βλ. εξ. 3.2.6-1 έως 3.2.6-4), όπως ακριβώς και σε χωρικούς φορείς.
3-89
Σ T
A Τ
Ι Κ Η
Ι

Κεφάλαιο 3. Θεμελιώδεις αρχές της Στατικής των γραμμικών φορέων
Σημείωση: Στη συνέχεια θα αναφερόμαστε κατά κύριο λόγο σε γεωμετρικά επίπεδους φορείς με φόρτιση που προκαλεί σ' αυτούς μόνο επίπεδη παραμόρφωση, διότι με τη βοήθειά τους μπορούν να διατυπωθούν όλες οι βασικές ιδέες και θεμελιώδεις σχέσεις της Στατικής και να διευκρινιστούν όλα τα σημαντικά χαρακτηριστικά της στατικής συμπεριφοράς γραμμικών φορέων, χωρίς να δυσχεραίνεται η παρουσίασή τους από την πολυπλοκότητα που προκαλεί η τρίτη διάσταση, όταν θεωρούμε φορείς στον χώρο. Όπου κρίνεται σκόπιμο θα γίνεται βέβαια αναφορά και σε χωρικούς φορείς και θα δίνονται σχετικά παραδείγματα.
Β3. Η ίνα αναφοράς Όταν πρόκειται για επίπεδους φορείς, εκτός από την προαναφερθείσα απλοποίηση των συμβολισμών παραλείπεται συχνά και η σχεδίαση των αξόνων αναφοράς x, y, z. Ο τοπικός άξονας x παραλείπεται, διότι θεωρείται αυτονόητο να ταυτίζεται με τον (κεντροβαρικό) άξονα της δοκού με φορά από το ('αριστερό') άκρο 1 προς το ('δεξιό') άκρο 2 της δοκού. Ο άξονας y παραλείπεται, διότι θεωρούμε πάντα ότι εξέρχεται κάθετα από το επίπεδο σχεδίασης. Έτσι, για τον πλήρη καθορισμό του τοπικού συστήματος απομένει να σχεδιασθεί ο άξονας z, ο οποίος βέβαια είναι κάθετος στον άξονα της δοκού και έχει φορά προς τα 'κάτω'. Αντ' αυτού σχεδιάζεται μία διακεκομμένη γραμμή, η λεγόμενη ίνα αναφοράς, σε εκείνη την πλευρά του άξονα της δοκού από την οποία εξέρχεται, τρόπος του λέγειν, ο θετικός άξονας z (Σχ. 3.2.6-3(β)). Η ίνα αναφοράς ταυτίζεται με την ακραία 'κάτω' ίνα της δοκού και χρησιμοποιείται για λόγους ευκολότερης κατανόησης της καμπτικής επιπόνησης της δοκού (Σχ. 3.2.6-4): Όταν οι καμπτικές ροπές είναι θετικές, η ίνα αναφοράς που βρίσκεται στην 'κάτω πλευρά' της δοκού εφελκύεται, ενώ όταν οι ροπές είναι αρνητικές θλίβεται. Και αντιστρόφως: Αν γνωρίζουμε προς ποια πλευρά στρέφει τα κοίλα μια καμπτικά παραμορφωμένη δοκός, τότε μπορούμε εύκολα να διακρίνουμε αν εφελκύεται ή θλίβεται η ίνα αναφοράς της σε οποιοδήποτε σημείο της δοκού και επομένως μπορούμε να συμπεράνουμε αν η καμπτική ροπή σ' αυτό το σημείο είναι θετική ή αρνητική. Τα εισαγωγικά στις παραπάνω λέξεις 'αριστερό', 'δεξιό' και 'κάτω' θέλουν να επισημάνουν τη σχετικότητα του χαρακτηρισμού, ο οποίος προϋποθέτει εν προκειμένω ότι ο τοπικός άξονας x του γραμμικού στοιχείου έχει οριζόντια θέση στο επίπεδο σχεδίασης. Ένα γραμμικό στοιχείο μπορεί όμως να είναι και λοξά διατεταγμένο μέσα στον δομικό φορέα. Επομένως, οι χαρακτηρισμοί 'αριστερό' άκρο, 'δεξιό' άκρο, 'κάτω' και 'επάνω' νοούνται πάντα στο τοπικό σύστημα αναφοράς x-y-z του στοιχείου αυτού. Σημειώνεται ότι σε περίπτωση καθαρού εφελκυσμού (χωρίς κάμψη) του δομικού στοιχείου η ίνα αναφοράς εφελκύεται, ενώ σε περίπτωση καθαρής θλίψης η ίνα αναφοράς θλίβεται. Θεωρώντας τον εφελκυσμό, στον οποίο εξ ορισμού αντιστοιχούν θετικές αξονικές δυνάμεις Ν, ως περίπτωση αναφοράς, η ίνα αναφοράς χαρακτηρίζεται συχνά (κυρίως στη γερμανική βιβλιογραφία) και ως 'ίνα εφελκυσμού'.
3-90
Σ T
A Τ
Ι Κ Η
Ι

ΣΤΑΤΙΚΗ ΤΩΝ ΚΑΤΑΣΚΕΥΩΝ - Τόμος Ι - Θεμελιώδεις αρχές και ισοστατικοί φορείς
10 kNm
10 kNm
10 kNm
10 kNm
των ροπών κάμψηςΤα βέλη δείχνουν την
ίνα αναφοράςθλίβεται
εφελκύεταιίνα αναφοράς
Τα βέλη δείχνουν τητων ροπών κάμψης
M= 10 kNm
M=10 kNm
Μ>0
M=10 kNm
Μ<0
M= 10 kNm
πραγματικήφορά
συμβατικάθετική φορά
Σχ. 3.2.6-4 Ίνα αναφοράς και πρόσημο καμπτικών ροπών
Η θέση της ίνας αναφοράς σε κάθε δομικό στοιχείο ενός φορέα καθορίζεται από τον μελετητή πριν την έναρξη του υπολογισμού των φορτίων διατομής. Προκειμένου να τονιστεί ο συμβατικός χαρακτήρας της επιλογής της θέσης της ίνας αναφοράς, δίνονται στο ακόλουθο σχήμα 3.2.6-5 για τον ίδιο πλαισιακό φορέα δύο διαφορετικές επιλογές για τον δεξιό στύλο. Η επιλογή της ίνας αναφοράς καθορίζει μονοσήμαντα το τοπικό σύστημα αναφοράς του δομικού αυτού στοιχείου, οπότε αυτόματα προκύπτουν και οι συμβατικά θετικές φορές των φορτίων διατομής για το στοιχείο αυτό.
x
z
= x
x
zz fl
=x
z
x x
z
z fl
Σχ. 3.2.6-5 Ορισμός προσήμων των φορτίων διατομής σε εξάρτηση από την ίνα αναφοράς
Συνοψίζοντας τα παραπάνω διαπιστώνουμε τα εξής: • Τα φορτία διατομής εμφανίζονται σε μία τομή ενός δομικού στοιχείου πάντοτε ως ζεύγη ίσων σε μέγεθος και αντίθετων σε φορά δυνάμεων ή ροπών.
3-91
Σ T
A Τ
Ι Κ Η
Ι

Κεφάλαιο 3. Θεμελιώδεις αρχές της Στατικής των γραμμικών φορέων
• Το 'αριστερό' σκέλος του κάθε ζεύγους δρα στη θετική ('αριστερή') όχθη και το 'δεξιό' ζεύγος στην αρνητική ('δεξιά') όχθη της τομής.
• Ένα φορτίο διατομής θεωρείται θετικό, αν η φορά του σκέλους του που δρα στη θετική ('αριστερή') όχθη μιας τομής συμπίπτει με τη θετική κατεύθυνση του τοπικού άξονα αναφοράς στο σημείο της τομής.
• Θετικές (αρνητικές) αξονικές δυνάμεις και θετικές (αρνητικές) καμπτικές ροπές προκαλούν εφελκυσμό (θλίψη) στην ίνα αναφοράς.
Β4. Σχηματική απεικόνιση των εσωτερικών συνδέσμων σε μια διατομή Όπως η στήριξη ενός φορέα στο στερεό υπόβαθρο και η μεταφορά των δυνάμεων έδρασης / στήριξης απεικονίζεται με τη βοήθεια κατάλληλων εξωτερικών δεσμικών ράβδων (βλ. παράγρ. 3.2.4), έτσι και η μεταφορά των φορτίων διατομής από την αριστερή στη δεξιά όχθη μιας τομής μπορεί κι αυτή σχηματικά να απεικονιστεί με τη βοήθεια εσωτερικών δεσμικών ράβδων που συνδέουν τις δύο όχθες. Έτσι, στο επίπεδο γραμμικό στοιχείο δοκού τα τρία φορτία διατομής (δηλαδή η ροπή Μ, η τέμνουσα Q και η αξονική δύναμη Ν) απαιτούν για τη μεταφορά τους τρεις κατάλληλα διατεταγμένες δρομικές δεσμικές ράβδους, όπως φαίνεται στα σχήματα 3.2.6-6(α1,β1,γ1). Κατάργηση της εσωτερικής δεσμικής ράβδου ρΜ (βλ. Σχ. 3.2.6-6(α2)) συνεπάγεται αδυναμία μεταφοράς της ροπής Μ και κατά συνέπεια οι από-μένουσες δύο μη συνευθειακές ράβδοι αντιστοιχούν σε καμπτική άρθρωση (Μ=0).
iδιατομή i
i
αριστερή όχθη της τομής
αρ iδεξ
δεξιάόχθη της τομής
iαρ iδεξ
Μ=0
ρΜ
iαρ iδεξ
Q=0
ρQ
iαρ iδεξ
N=0
ρN
(α1) (β1) (γ1)
(α2) (β2) (γ2)
Σχ. 3.2.6-6 Εσωτερικές δεσμικές ράβδοι μεταφοράς φορτίων διατομής
Κατάργηση της εσωτερικής δεσμικής ράβδου ρQ (βλ. Σχ. 3.2.6-6(β2)) συνεπάγεται αδυναμία μεταφοράς της τέμνουσας Q και κατά συνέπεια οι απομένουσες δύο οριζόντιες και παράλληλες δεσμικές ράβδοι αντιστοιχούν σε διατμητική άρθρωση (Q=0). Τέλος, κατάργηση της εσωτερικής δεσμικής ράβδου ρΝ (βλ. Σχ. 3.2.6-6(γ2))
3-92
Σ T
A Τ
Ι Κ Η
Ι

ΣΤΑΤΙΚΗ ΤΩΝ ΚΑΤΑΣΚΕΥΩΝ - Τόμος Ι - Θεμελιώδεις αρχές και ισοστατικοί φορείς
συνεπάγεται αδυναμία μεταφοράς της αξονικής δύναμης Ν και κατά συνέπεια οι απομένουσες δύο κατακόρυφες και παράλληλες δεσμικές ράβδοι αντιστοιχούν σε αξονική άρθρωση (Ν=0).
Γ. Φορτία διατομής συνοριακών διατομών και αντιδράσεις στηρίξεων Οι δομικοί φορείς μεταφέρουν τα φορτία που ασκούνται επάνω τους στο έδαφος θεμελίωσης (στερεό υπόβαθρο) μέσω των στηρίξεών τους. Σύμφωνα με την αρχή της αποδέσμευσης του Lagrange (βλ. παράγρ. 3.2.5-Γ), αν καταλύοντας (τέμνοντας) όλες τις δεσμικές ράβδους στήριξης αποσπάσουμε έναν ισορροπούντα φορέα από τις στηρίξεις του, τότε στις επιφάνειες των τομών (που είναι οι συνοριακές διατομές του φορέα) θα πρέπει να προσαχθούν τα φορτία διατομής, προκειμένου να διατηρηθεί η ισορροπία του φορέα. Τα φορτία διατομής είναι, όπως είδαμε πιο επάνω, ζεύγη δυνάμεων ή ροπών, το ένα σκέλος των οποίων δρα από τον φορέα επάνω στο έδαφος (εδαφική όχθη της τομής) και το άλλο, ισομεγέθες και με αντίθετη φορά, από το έδαφος επάνω στον φορέα (συνοριακή όχθη ή συνοριακή διατομή του φορέα). Τα μεγέθη που ασκούνται επάνω στην εδαφική όχθη της τομής είναι οι δυνάμεις έδρασης και τα μεγέθη που ασκούνται επάνω στη συνοριακή όχθη του φορέα είναι οι αντιδράσεις στήριξης (βλ. παράγρ. 3.2.5-Β). Επομένως, οι αντιδράσεις στήριξης ισούνται διανυσματικά με τα φορτία διατομής των συνοριακών διατομών του φορέα. Η ισότητα (ισορροπία) αυτή, που πρέπει να ισχύει σε όλα τα σημεία στήριξης του φορέα, συνιστά, μαζί με την απαίτηση ισορροπίας σε σημεία που ασκούνται εξωτερικά φορτία, τις συνοριακές στατικές συνθήκες του φορέα. Ως παράδειγμα, το ακόλουθο σχήμα 3.2.6-7 δείχνει τις αντιδράσεις ενός (υπερστατικά εδραζόμενου) επίπεδου ημιπλαισίου. Το γεγονός ότι οι αντιδράσεις
V1=-N1
H1= Q1
M1Q1 N1
συνοριακή όχθητου φορέα
=M1Mπ1
V3=-Q3
H3=-N3
1
2
3N3
Q3
M3=0
εδαφική όχθητης συνοριακής τομής
Σχ. 3.2.6-7 Συσχετισμός αντιδράσεων στήριξης και φορτίων διατομής συνοριακών διατομών
στήριξης δεν είναι παρά τα φορτία διατομής των συνοριακών διατομών φαίνεται από το διάγραμμα ελεύθερου σώματος. Ο συσχετισμός τους με τα φορτία διατομής των συνοριακών διατομών του φορέα προκύπτει από τις συνθήκες ισορροπίας στα
3-93
Σ T
A Τ
Ι Κ Η
Ι

Κεφάλαιο 3. Θεμελιώδεις αρχές της Στατικής των γραμμικών φορέων
σημεία στήριξης. Είναι σαφές ότι οι αντιδράσεις στήριξης ισούνται κατ΄ απόλυτη τιμή με τα φορτία διατομής των συνοριακών διατομών του φορέα, ενώ διαφέρουν από αυτά μόνο ως προς το πρόσημο, λόγω των ενδεχομένως διαφορετικών συμβατικών θετικών φορών τους στο κάθε σημείο στήριξης.
Δ. Υπολογισμός φορτίων διατομής με τις συνθήκες ισορροπίας Για τον υπολογισμό των φορτίων διατομής εφαρμόζουμε τη μέθοδο των νοητών διαχωριστικών τομών σε συνδυασμό με τις συνθήκες ισορροπίας. Ακολουθούν ορισμένα απλά παραδείγματα επίπεδων και χωρικών φορέων. Υπενθυμίζεται (βλ. παράγρ. 3.2.6-Α) ότι οι διαχωριστικές τομές είναι κλειστές κυκλικές/σφαιρικές τομές, μέσω των οποίων αποσπάται ένα τμήμα του φορέα συμπεριλαμβανομένων και όλων των εξωτερικών φορτίων που ενεργούν σ' αυτό.
Παράδειγμα Δ1: Αμφιέρειστη δοκός με συγκεντρωμένα φορτία Για την αμφιέρειστη δοκό του σχήματος 3.2.6-8(α) ζητούνται τα φορτία διατομής Μm··, Qm··, Nm·· στο μέσον m του ανοίγματος και ακριβέστερα στο σημείο m·· που βρίσκεται αμέσως δεξιά από τα συγκεντρωμένα φορτία.
1 2
L/2 L/2
PZPX
XZ
AZ2AZ1
AX1
(α)
AΧ1=ΡΧAΖ1 =ΡΖ /2
AΖ2 =ΡΖ /2mm∏
m∏∏
L/2
PZPX Nm
Mm
AZ1
AX1
(β)Qm
1 2
L/2
m∏∏
Συνθήκες ισορροπίας για το δεξιό τμήμα m -2:∏∏
AΖ2 =ΡΖ /2
( )
( )
( ) ( ) ( ) ( ) ( ) 4LPA2LM0MA2L0M3
2PAQ0AQ0F2
0N0F1
ZZ2mmZ2m
ZZ2mZ2mZ
mX
••• ==⇒=−⇒=
−=−=⇒=−−⇒=
=⇒=
••••••
••••
••
∑∑∑
Σχ. 3.2.6-8 Φορτία διατομής στο μέσο μιας αμφιέρειστης δοκού υπό μοναχικά φορτία Λύση: (α) Πρώτα υπολογίζονται οι αντιδράσεις στήριξης με τον τρόπο που μάθαμε στην παράγραφο 3.2.5-Δ (βλ. Παράδειγμα Δ1-1, Σχ. 3.2.5-8).
3-94
Σ T
A Τ
Ι Κ Η
Ι

ΣΤΑΤΙΚΗ ΤΩΝ ΚΑΤΑΣΚΕΥΩΝ - Τόμος Ι - Θεμελιώδεις αρχές και ισοστατικοί φορείς
(β) Στη συνέχεια, με μια κλειστή κυκλική τομή που διέρχεται από το σημείο m·· αποσπούμε το δεξιό τμήμα του φορέα (βλ. Σχ. 3.2.6-8 (β)) και καταστρώνουμε γι΄ αυτό τις τρεις συνθήκες ισορροπίας που διαθέτουμε στο επίπεδο (βλ. εξ. (3.2.5-2). Παρατηρούμε ότι στις συνθήκες ισορροπίας δεν υπεισέρχονται τα εξωτερικά φορτία ΡΧ και ΡΖ. Από τις εξισώσεις ισορροπίας προκύπτουν άμεσα οι τιμές των ζητούμενων φορτίων διατομής. Σημείωση 1: Το ίδιο ακριβώς αποτέλεσμα θα παίρναμε αν με μια κλειστή κυκλική τομή που διέρχεται από το σημείο m·· αποσπούσαμε το αριστερό τμήμα του φορέα και καταστρώναμε γι’ αυτό τις τρεις συνθήκες ισορροπίας. Στην περίπτωση αυτή θα υπεισέρχονταν βέβαια στις συνθήκες ισορροπίας και τα εξωτερικά φορτία ΡΧ και ΡΖ. Σημείωση 2: Είναι σαφές ότι οι τιμές της αξονικής και της τέμνουσας δύναμης στο σημείο m·, το οποίο βρίσκεται αμέσως αριστερά από τα συγκεντρωμένα φορτία, θα είναι διαφορετικες από τις υπολογισθείσες τιμές τους στο σημείο m··, ενώ η τιμή της ροπής κάμψης παραμένει ίδια. Ο ενεργός αναγνώστης να επιβεβαιώσει ότι ισχύει: Νm·=ΡΧ, Qm·=ΡZ/2 και Μm·=M m·.
Παράδειγμα Δ2: Πρόβολος στο επίπεδο με συγκεντρωμένα φορτία στο ελεύθερο άκρο Ζητούνται τα φορτία διατομής Μm, Qm, Nm στο μέσον m του επίπεδου προβόλου του παρακάτω σχήματος 3.2.6-9(α). Βλ. επίσης Σχ. 3.2.5-10.
m
L/2
1
2
L/2
VH
XZ
AZ1
MΠ1
AX1(α)
(β)
1
2
L/2
VH
AZ1
AX1
Nm
Mm
Qm
m∏∏
m∏
MΠ1
L/2
( )( )( ) ( ) ( ) ( )⎪⎪⎩
⎪⎪⎨
⎧
−=⇒=−−⇒=
=⇒=+−⇒=
=⇒=+−⇒=
−••
••
∑∑∑
2LVM0MV2L0M3
VQ0VQ0F2
HN 0HN0F1
mmm
mmZ
mmX
: 2mτμήμαδεξιότογια
ισορροπίαςΣυνθήκες
Σχ. 3.2.6-9 Φορτία διατομής στο μέσο ενός προβόλου
3-95
Σ T
A Τ
Ι Κ Η
Ι

Κεφάλαιο 3. Θεμελιώδεις αρχές της Στατικής των γραμμικών φορέων
Λύση: Με μία νοητή τομή που διέρχεται από το σημείο m αποσπούμε το δεξιό τμήμα του προβόλου, καταστρώνουμε γι' αυτό τις τρεις συνθήκες ισορροπίας και από αυτές παίρνουμε άμεσα τις τιμές των ζητούμενων φορτίων διατομής (Σχ. 3.2.6-9(β)). Παρατηρούμε ότι ο υπολογισμός των Μm, Qm, Nm δεν απαιτεί τη γνώση των αντιδράσεων στήριξης του προβόλου. Σημείωση: Το ίδιο αποτέλεσμα θα παίρναμε (Σημ.: Ο αναγνώστης καλείται να το επαληθεύσει αυτό), αν πρώτα υπολογίζαμε τις αντιδράσεις ΑΧ1 , ΑΖ1 και ΜΠ1 στην πάκτωση (βλ. παράγρ. 3.2.5-Δ, Παράδειγμα Δ1-2) και κατόπιν, αφού αποσπούσαμε με μία κλειστή κυκλική τομή που διέρχεται από το σημείο m το αριστερό τμήμα του φορέα, καταστρώναμε γι΄ αυτό τις συνθήκες ισορροπίας.
Παράδειγμα Δ3: Πρόβολος στον χώρο με συγκεντρωμένο φορτίο στο ελεύθερο άκρο Ζητούνται τα φορτία διατομής Μm, Qm, Nm στο μέσο m του τμήματος 1-2 του χωρικού προβόλου του παρακάτω σχήματος 3.2.6-10(α). Βλ. επίσης Σχ. 3.2.5-11.
ΜΠZ1
ΜΠX1
ΜΠY1
P
Y ZX
=8mL1
1 2
=100kNZ3
=2mL2m
L1/2
ΜΠX1
A
ΜΠZ1ΜΠY1
AY1
Χ1
AΖ1
(α)
(β)1
L1/2
A
AY1
Χ1
AΖ1
P
2
=100kNZ3
=2mL2m∏
ΜZm
ΜXmΜYm
QYm
QΖm
Nm
m∏∏
QYm
Nm
QΖm
ΜYm
ΜZmΜXm
( )( )( )( ) ( )
( ) ( ) ( ) ( )( ) ( ) 0M0M6
400kNm2LPM 02LPM0M5
200kNmLPM 0LPM0M4
100kNPQ 0PQ0F3
0Q0F2
0N0F1τμήμαδεξιότογιαισορροπίαςΣυνθήκες
ZmmZ
1ZYm1ZYmmY
2ZXm2ZXmmX
ZZmZZmZ
YmY
mX
=⇒=
−=−=⇒=−−⇒=
−=−=⇒=−−⇒=
==⇒=+−⇒=
=⇒=
=⇒=
−−
∑∑∑∑∑∑
••
••
•• :32m
Σχ. 3.2.6-10 Φορτία διατομής σε χωρικό πρόβολο
3-96
Σ T
A Τ
Ι Κ Η
Ι

ΣΤΑΤΙΚΗ ΤΩΝ ΚΑΤΑΣΚΕΥΩΝ - Τόμος Ι - Θεμελιώδεις αρχές και ισοστατικοί φορείς
Λύση: Με μία νοητή τομή που διέρχεται από το σημείο m αποσπούμε το δεξιό τμήμα του προβόλου, καταστρώνουμε γι' αυτό τις έξι συνθήκες ισορροπίας και από αυτές παίρνουμε άμεσα τις τιμές των ζητούμενων φορτίων διατομής (Σχ. 3.2.6-10(β)). Παρατηρούμε ότι όπως και στον επίπεδο πρόβολο ο υπολογισμός των Μm, Qm, Nm δεν απαιτεί τη γνώση των αντιδράσεων στήριξης.
Παράδειγμα Δ4: Επίπεδη εσχάρα δοκών
Για την εσχάρα δοκών του σχήματος 3.2.6-11(α) ζητούνται τα φορτία διατομής Μm, Qm, Nm στο μέσον m της δοκού 1-4.
PY=50kN
PY Z
X
X
PZ
PYAZ1
A X1
AY1
L1=2m L2=4m
4
2
1
3
5=100kN
=30kN
=50kN L3=5m
L4=3m
m(α)
AΧ1=30kN
A Y1=-100kN
A Ζ1=-200kN
PX
PZ =100kN
=30kN
4
AZ1
A X1
AY1
2
1
3
5(β) m∏
ΜZm
ΜXmΜYm
QYm
QΖm
Nm
m∏∏
QYm
Nm
QΖmΜZm
ΜXm
ΜYm
( )
( )
( )
( ) ( )
( ) ( ) ( )
( ) ( ) ( ) ( )⎪⎪⎪⎪⎪⎪
⎩
⎪⎪⎪⎪⎪⎪
⎨
⎧
=−−=−=⇒=
−=−==⇒=
=⇒=
−==⇒=
−==⇒=
==⇒=
−
••
••
•
∑
∑
∑
∑
∑
∑
100kNm11002LAM0M6
200kNm12002LAM0M5
0M0M4
200kNAQ0F3
100kNAQ0F2
30kNAN0F1
: m 1τμήμααριστερότογια
ισορροπίαςΣυνθήκες
1Y1ZmmZ
1Z1YmmY
XmmX
Z1ZmZ
Y1YmY
X1mX
Σχ. 3.2.6-11 Επίπεδη σχάρα δοκών στον χώρο
3-97
Σ T
A Τ
Ι Κ Η
Ι

Κεφάλαιο 3. Θεμελιώδεις αρχές της Στατικής των γραμμικών φορέων
Λύση: (α) Πρώτα υπολογίζουμε τις τρεις αντιδράσεις ΑΧ1, ΑΥ1, ΑΖ1 της στήριξης του σημείου 1 με την αρχή της αποδέσμευσης του Lagrange και τις συνθήκες ισορροπίας (βλ. Σχ. 3.2.5-12). (β) Στη συνέχεια, με μια κλειστή κυκλική τομή που διέρχεται από το σημείο m αποσπούμε το αριστερό τμήμα της δοκού 1-4 και καταστρώνουμε γι' αυτό τις έξι συνθήκες ισορροπίας που διαθέτουμε στον χώρο (βλ. εξ. (3.2.5-1)). Από τις εξισώσεις ισορροπίας προκύπτουν άμεσα οι τιμές των φορτίων διατομής (Σχ. 3.2.6-11(β)).
Παράδειγμα Δ5: Ισοστατικά εδραζόμενο κλειστό επίπεδο πλαίσιο Για το κλειστό επίπεδο πλαίσιο του σχήματος 3.2.6-12(α), το οποίο εδράζεται ισοστατικά, ζητούνται τα φορτία διατομής Μm, Qm, Nm στο μέσον m της δοκού 1-4.
XZ
L/2
q
H
Α =0Χ1
Α qΖ1•L( ) /2=
Α qZ4•L( ) /2=
AZ1 AZ4
A X1
1
2 3
4
k(α)
(β)
m
L/2
L/2
AZ1
A X1
1
2
q
AZ4
H3
4
L/2
Nk
Nm
m∏
k∏
QmMmMm
Qm
Qk
Qk Mk
Mk
k∏∏
m∏∏
( )( ) ( ) ( )( ) ( ) ( ) ( ) ( )
( )
••
• •
• • • •
•• ••
• •
⎧ = ⇒ − − = ⇒ = −⎪⎪ = ⇒ − − + = ⇒ = − +⎪⎨ = ⇒ − + + − =⎪⎪− − −⎪ ⇒ = − −⎩
∑∑∑
X k m m k
Z k m m k
m k k Z4m
2m k k
1 F 0 N N 0 N NΣυνθήκες ισορροπίας
2 F 0 Q Q q L 2 0 Q Q q L 2για το δεξιό τμήμα :
3 M 0 M M N H A L 2 q L 2 L 4k 3 4 m
M M N H q L 8
0
Σχ. 3.2.6-12 Φορτία διατομής εσωτερικά υπερστατικού πλαισίου
3-98
Σ T
A Τ
Ι Κ Η
Ι

ΣΤΑΤΙΚΗ ΤΩΝ ΚΑΤΑΣΚΕΥΩΝ - Τόμος Ι - Θεμελιώδεις αρχές και ισοστατικοί φορείς
Λύση: (α) Οι τρεις αντιδράσεις στήριξης υπολογίζονται με την αρχή της αποδέσμευσης του Lagrange και τις συνθήκες ισορροπίας όπως ακριβώς και για την αμφιέρειστη δοκό (βλ. Σχ. 3.2.5-9 (α) και (δ)). (β) Στη συνέχεια, με μια κλειστή κυκλική τομή που διέρχεται από το σημείο m αποσπούμε το δεξιό τμήμα του φορέα, όπως φαίνεται στο σχήμα 3.2.6-12(β), προκειμένου να καταστρώσουμε τις συνθήκες ισορροπίας. Παρατηρούμε ότι αναπόφευκτα η κλειστή κυκλική αυτή τομή τέμνει τον φορέα και σε ένα ακόμη σημείο k. Συνεπώς, για να παραμείνει το αποσπασθέν τμήμα σε ισορροπία, πρέπει να προσαχθούν στα σημεία τομής m και k τα αντίστοιχα φορτία διατομής, τα οποία και υπεισέρχονται στις συνθήκες ισορροπίας του τμήματος αυτού του φορέα. Έτσι, οι τρεις διαθέσιμες συνθήκες ισορροπίας περιλαμβάνουν συνολικά έξι άγνωστα εντασιακά μεγέθη και άρα δεν είναι δυνατός ο υπολογισμός των ζητουμένων φορτίων διατομής στο σημείο m. Όπως αναφέρθηκε στη Σημείωση Δ3-α της παραγράφου 3.2.5-Δ, αν οι συνθήκες ισορροπίας δεν επαρκούν για τον υπολογισμό των εξωτερικών ή/και εσωτερικών εντασιακών μεγεθών ενός φορέα, τότε ο φορέας αυτός χαρακτηρίζεται ως υπερστατικός. Πιο συγκεκριμένα, στην περίπτωση του αμφιέρειστου κλειστού πλαισίου του παραδείγματός μας, πρόκειται για έναν ισοστατικά εδραζόμενο, αλλά εσωτερικά υπερστατικό φορέα, αφού τα εξωτερικά εντασιακά του μεγέθη, δηλαδή οι αντιδράσεις των στηρίξεών του, υπολογίζονται από τις συνθήκες ισορροπίας, όχι όμως και τα εσωτερικά εντασιακά μεγέθη του. Κατά συνέπεια, το κλειστό πλαίσιο θεωρούμενο ως ελεύθερο σώμα, αποδεσμευμένο δηλαδή από τις στηρίξεις του, συνιστά έναν εσωτερικά υπερστατικό δίσκο. Παρομοίως, το χωροπλαίσιο του σχήματος 3.2.5-13 (βλ. παράγρ. 3.2.5, Παράδειγμα Δ1-5) εδράζεται μεν ισοστατικά, αλλά είναι εσωτερικά υπερστατικό. Σε αντίθεση με τους παραπάνω εσωτερικά υπερστατικούς δίσκους σημειώνεται εδώ ότι ο γνωστός μας τριγωνικός ραβδοδίσκος είναι ένας εσωτερικά ισοστατικός δίσκος, ο οποίος όταν εδράζεται ισοστατικά (βλ. π.χ. σχήμα 3.2.5-9(ε)) αποτελεί έναν ισοστατικό φορέα. Το ακόλουθο παράδειγμα αφορά σε έναν υπερστατικό φορέα, του οποίου όμως η υπερστατικότητα οφείλεται στη μη ισοστατική στήριξη του φορέα-δίσκου.
Παράδειγμα Δ6: Συνεχής δοκός δύο ανοιγμάτων
Για τη συνεχή δοκό δύο ανοιγμάτων του σχήματος 3.2.6-13(α) ζητούνται τα φορτία διατομής Μm, Qm, Nm στο μέσον m του δεύτερου φατνώματος 2-3.
Λύση: Αν, όπως πράξαμε στα προηγούμενα παραδείγματα, με μια κλειστή κυκλική τομή που διέρχεται από το σημείο m αποσπάσουμε το δεξιό τμήμα του φορέα (Σχ. 3.2.6-13(β)) και καταστρώσουμε τις τρεις συνθήκες ισορροπίας που διαθέτουμε στο επίπεδο, διαπιστώνουμε ότι σ' αυτές υπεισέρχονται τα τρία ζητούμενα φορτία διατομής και η αντίδραση ΑΖ3. Αν η αντίδραση αυτή είναι γνωστή, τότε οι τρεις
3-99
Σ T
A Τ
Ι Κ Η
Ι

Κεφάλαιο 3. Θεμελιώδεις αρχές της Στατικής των γραμμικών φορέων
αυτές εξισώσεις μας δίνουν τα ζητούμενα φορτία διατομής στο σημείο m. Όπως όμως γνωρίζουμε από την παράγραφο 3.2.5-Δ3 (βλ.Παράδειγμα Δ3-1), η στήριξη της συνεχούς δοκού δύο ανοιγμάτων είναι υπερστατική, δηλαδή οι συνθήκες ισορροπίας δεν επαρκούν για τον υπολογισμό των αντιδράσεων στήριξης. Κατά συνέπεια, οι τρεις συνθήκες ισορροπίας που καταστρώθηκαν για τον υπολογισμό των Μm, Qm, Nm περιλαμβάνουν συνολικά τέσσερα άγνωστα μεγέθη και άρα δεν είναι δυνατός ο υπολογισμός των ζητουμένων φορτίων διατομής.
1 2 3L
XZ
m
2/2 L2 /2L1
q
(β) Nm
Mm
Qmm∏∏m∏
(α)
1 2 3
L AZ32 /2 L2/2L1
q
( ) mX 0N0F1 =⇒=∑
3m τμήμα δεξιό το
για ισορροπίας Συνθήκες
−••
( ) ( )
( ) ( ) ( ) ( )2Z322mm
2Z3mZ
02LA8LqM0M3
02LqAQ0F2
=+−−⇒=
=+−−⇒=
••
•
∑
∑
Z3mm A,M ,Qμεγέθη
άγνωστα 3 μεεξισώσεις 2
Σχ. 3.2.6-13 Φορτία διατομής δοκού δύο ανοιγμάτων
Γενικεύοντας τα παραπάνω, μπορούμε να πούμε ότι υπερστατική στήριξη ενός δίσκου στο επίπεδο ή ενός σώματος στον χώρο σημαίνει αδυναμία υπολογισμού των εσωτερικών εντασιακών του μεγεθών με βάση μόνο τις συνθήκες ισορροπίας. Συνεπώς, σύμφωνα με τον ορισμό του υπερστατικού φορέα που δόθηκε στην Σημείωση Δ3α της παραγράφου 3.2.5-Δ3, υπερστατικά εδραζόμενοι δίσκοι και υπερστατικά εδραζόμενα σώματα ανήκουν στους υπερστατικούς φορείς. Σημειώνεται εδώ ότι γενικώς ο υπολογισμός των υπερστατικών φορέων (είτε αυτοί είναι εσωτερικά υπερστατικοί και ισοστατικά εδραζόμενοι δίσκοι/σώματα, όπως το κλειστό πλαίσιο του παραδείγματος Δ5, είτε είναι υπερστατικά εδραζόμενοι δίσκοι/σώματα, όπως η συνεχής δοκός δύο ανοιγμάτων του παραδείγματος Δ6, είτε και τα δύο μαζί) δεν μπορεί να επιτευχθεί μόνο με τη βοήθεια των συνθηκών ισορροπίας, αλλά απαιτεί - όπως θα δούμε αργότερα - την παράλληλη χρησιμοποίηση των συνθηκών συμβιβαστού και των καταστατικών εξισώσεων υλικού. Οι κλασικές μέθοδοι υπολογισμού υπερστατικών φορέων αποτελούν αντικείμενο του δεύτερου τόμου [Αβρ-ΙΙ] του παρόντος συγγράμματος.
3-100
Σ T
A Τ
Ι Κ Η
Ι

ΣΤΑΤΙΚΗ ΤΩΝ ΚΑΤΑΣΚΕΥΩΝ - Τόμος Ι - Θεμελιώδεις αρχές και ισοστατικοί φορείς
Η μέθοδος των διαχωριστικών τομών που εφαρμόστηκε παραπάνω για τον υπολογισμό εντασιακών μεγεθών απλών ισοστατικών φορέων με τις συνθήκες ισορροπίας θα παρουσιαστεί συστηματικά και διεξοδικά για τυχόντες (απλούς ή σύνθετους) ισοστατικούς φορείς στην παράγραφο 6.2 του κεφαλαίου 6, όπου και θα δοθούν διάφορα χαρακτηριστικά παραδείγματα.
Επίσης, μία σειρά ασκήσεων που αφορούν στον υπολογισμό φορτίων διατομής επίπεδων και χωρικών ισοστατικών φορέων με τη μέθοδο των διαχωριστικών τομών και τις συνθήκες ισορροπίας δίνεται στον τόμο Ια του παρόντος συγγράμματος ([Αβρ-Ια], Ασκήσεις Ζ1-Ζ8 της Σειράς Ζ). Ε. Τα διαγράμματα των φορτίων διατομής - Υπολογισμός και σχεδίαση Ο υπολογισμός των φορτίων διατομής σε μεμονωμένα σημεία ενός φορέα δεν αρκεί συνήθως για τον σχηματισμό ολοκληρωμένης εικόνας σχετικά με τη συνολική επιπόνησή του. Προς τούτο απαιτείται ο υπολογισμός των φορτίων διατομής όχι μόνο σε συγκεκριμένα, αλλά σε όλα τα σημεία του φορέα, καθόλο δηλαδή το μήκος των διαφόρων δομικών στοιχείων του. Η συνάρτηση που για συγκεκριμένη εξωτερική φόρτιση δίνει το μέγεθος ενός φορτίου διατομής S(x) κατά μήκος των τοπικών αξόνων x των δομικών στοιχείων του φορέα ονομάζεται διάγραμμα του φορτίου διατομής S(x) για τη συγκεκριμένη εξωτερική φόρτιση. Οι χωρικοί φορείς απαιτούν για τον πλήρη καθορισμό της εντασιακής τους κατάστασης έξι διαγράμματα, ένα για κάθε φορτίο διατομής Ν(x), Qy(x), Qz(x), Mx(x), My(x) και Mz(x). Σε επίπεδους φορείς μέσα στο επίπεδο X-Z, οι οποίοι φορτίζονται από συνεπίπεδα με αυτούς φορτία, αρκούν τρία μόνον διαγράμματα: το διάγραμμα της αξονικής δύναμης Ν(x), το διάγραμμα της τέμνουσας δύναμης Q(x)=Qz(x) και το διάγραμμα των ροπών κάμψης Μ(x)=My(x)1. Κάθε διάγραμμα ενός φορτίου διατομής καθορίζεται από το μέγεθος και το πρόσημο των τεταγμένων του. Για μία ενιαία σχεδίαση των διαγραμμάτων τηρούμε την εξής σύμβαση:
Σύμβαση σχεδίασης διαγραμμάτων φορτίων διατομής
Θετικές τιμές των ροπών κάμψης σχεδιάζονται υπό κλίμακα προς την πλευρά της ίνας αναφοράς, δηλαδή προς την πλευρά που δείχνει ο τοπικός άξονας z σε κάθε δομικό στοιχείο. Αρνητικές τιμές σχεδιάζονται προς την αντίθετη πλευρά. Για τις τέμνουσες και τις αξονικές ισχύει το ακριβώς αντίστροφο.
Στη συνέχεια παρουσιάζονται τρία παραδείγματα υπολογισμού διαγραμμάτων φορτίων διατομής απλών ισοστατικών φορέων. Ο υπολογισμός γίνεται με
1 Γραφικές παραστάσεις Μ(x), Q(x), Ν(x) κτλ. για τη μεταβολή των φορτίων διατομής χρησιμοποιήθηκαν κατά πάσα πιθανότητα για πρώτη φορά από τον καθηγητή του Πολυτεχνείου της Βιέννης GEORG REBHANN (1824-1892).
3-101
Σ T
A Τ
Ι Κ Η
Ι

Κεφάλαιο 3. Θεμελιώδεις αρχές της Στατικής των γραμμικών φορέων
γενικευμένο τρόπο: Πρώτα υπολογίζονται με τη βοήθεια της μεθόδου των νοητών διαχωριστικών τομών και των συνθηκών ισορροπίας τα φορτία διατομής Μ(x), Q(x), Ν(x) σε ένα τυχαίο σημείο x του φορέα. Τα φορτία διατομής προκύπτουν έτσι ως συναρτήσεις της συντεταγμένης x του σημείου αυτού. Κατόπιν σχεδιάζονται τα διαγράμματα των συναρτήσεων αυτών σύμφωνα με την παραπάνω σύμβαση σχεδίασης διαγραμμάτων.
Παράδειγμα Ε1: Αμφιέρειστη δοκός με συνεχές σταθερό φορτίο q
Ο φορέας με τη δεδομένη φόρτιση, η κυκλική διαχωριστική τομή για τον υπολογισμό των φορτίων διατομής στο σημείο x, οι σχετικές εξισώσεις ισορροπίας και τα διαγράμματα των φορτίων διατομής δίνονται στο παρακάτω σχήμα 3.2.6-14.
(α) 1 2
x
XZ
N(x) M(x)
Q(x)2
L-xAΖ2 =q L/2∏
(β)
( ) ( )
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )[ ] ( )xL2xqxM0M3
2LqxLqxQ0F2
0xN0F1
x
Z
X
−=⇒=
−−=⇒=
=⇒=
••
••
∑
∑
∑
(γ) 1 2N(x) [kN]
1 2Q(x) [kN]
0
+
-
q L/2∏
-q L/2∏
L/2
1 2M(x) [kNm]+
q L/8∏2
Σχ. 3.2.6-14 Διαγράμματα Μ(x), Q(x), Ν(x) μιας αμφιέρειστης δοκού υπό συνεχές φορτίο q
3-102
Σ T
A Τ
Ι Κ Η
Ι

ΣΤΑΤΙΚΗ ΤΩΝ ΚΑΤΑΣΚΕΥΩΝ - Τόμος Ι - Θεμελιώδεις αρχές και ισοστατικοί φορείς
Παράδειγμα Ε2: Πρόβολος στο επίπεδο με συγκεντρωμένα φορτία στο ελεύθερο άκρο Ο φορέας με τη δεδομένη φόρτιση, η κυκλική διαχωριστική τομή για τον υπολογισμό των φορτίων διατομής στο σημείο x, οι σχετικές εξισώσεις ισορροπίας και τα διαγράμματα των φορτίων διατομής δίνονται στο παρακάτω σχήμα 3.2.6-15.
1
2
VH
XZ
(α)
(β)2
VHN(x)
M(x)
Q(x)L-x
x
( ) ( )
( ) ( )
( ) ( ) ( ) ( )xLVxM0M3
VxQ0F2
HxN0F1
x
Z
X
−−=⇒=
=⇒=
−=⇒=
•∑∑∑
1 2N(x) [kN]
--H
1 2Q(x) [kN]
V +
1 2M(x) [kNm]
--V L∏
(γ)
Σχ. 3.2.6-15 Διαγράμματα Μ(x), Q(x), Ν(x) ενός προβόλου με μοναχικά φορτία
Παράδειγμα Ε3: Πρόβολος στον χώρο με κατακόρυφο φορτίο στο ελεύθερο άκρο Ο φορέας με τη δεδομένη φόρτιση και τα υπολογισθέντα διαγράμματα των φορτίων διατομής δίνονται στο παρακάτω σχήμα 3.2.6-16. Η επιλογή των κατάλληλων διαχωριστικών τομών και η κατάστρωση των σχετικών συνθηκών ισορροπίας επαφίεται ως άσκηση στον αναγνώστη.
Στο θέμα υπολογισμού και σχεδίασης των διαγραμμάτων των φορτίων διατομής θα επανέλθουμε συστηματικά και διεξοδικότερα στην παράγραφο 6.5. Εκεί, καθώς επίσης και στο κεφάλαιο 7, θα δοθούν περισσότερα αριθμητικά παραδείγματα για διάφορους τύπους απλών και σύνθετων ισοστατικών φορέων υπό ποικιλία φορτίσεων. Επίσης, μία σειρά ασκήσεων που αφορούν στον υπολογισμό διαγραμμάτων φορτίων διατομής επίπεδων και χωρικών ισοστατικών φορέων δίνεται στον τόμο Ια του παρόντος συγγράμματος ([Αβρ-Ια], Ασκήσεις της Σειράς Η και Θ αντιστοίχως).
3-103
Σ T
A Τ
Ι Κ Η
Ι

Κεφάλαιο 3. Θεμελιώδεις αρχές της Στατικής των γραμμικών φορέων
100
P
Y ZX
=8mL1
1 2
=100kNZ3
=2mL2
P
=8mL1
=100kNZ
=2mL2
XY
(α)
yx
z
yx
z
yx
y
x
(β) Η κατάστρωση των κατάλληλων συνθηκών ισορροπίαςεπαφίεται ως άσκηση στον αναγνώστη
(γ)
+
+
Q [kN]z
M [kNm]y
100
-
-200
-
-800 M [kNm]z
0
-
M [kNm]T
-200
0
0
N [kN]
0
Q [kN]y
0
0
0 Σχ. 3.2.6-16 Διαγράμματα φορτίων διατομής ενός προβόλου στον χώρο με κατακόρυφο
συγκεντρωμένο φορτίο στο ελεύθερο άκρο του
3-104
Σ T
A Τ
Ι Κ Η
Ι

ΣΤΑΤΙΚΗ ΤΩΝ ΚΑΤΑΣΚΕΥΩΝ - Τόμος Ι - Θεμελιώδεις αρχές και ισοστατικοί φορείς
3.2.7 Η διάκριση μεταξύ ισοστατικών και υπερστατικών φορέων Συνοψίζοντας όσα αποκομίσαμε από τη σύντομη μελέτη των απλών παραδειγμάτων των προηγούμενων δύο παραγράφων 3.2.5 και 3.2.6, επισημαίνουμε ότι οι εξισώσεις ισορροπίας δεν αρκούν πάντοτε (Σημ.: Στη δομική πράξη αρκούν σε λίγες μόνον περιπτώσεις) για τον πλήρη προσδιορισμό της εντασιακής κατάστασης ενός φορέα. Φορείς, των οποίων τα εντασιακά μεγέθη (αντιδράσεις στήριξης και φορτία διατομής) μπορούν να υπολογιστούν πλήρως με τις συνθήκες ισορροπίας, ονομάζονται στατικώς ορισμένοι ή ισοστατικοί. Τέτοιοι είναι π.χ. οι φορείς των παραδειγμάτων Δ1 έως Δ4. Οι κλασικές μέθοδοι υπολογισμού ισοστατικών φορέων αποτελούν αντικείμενο του παρόντος τόμου Ι. Φορείς, των οποίων τα εντασιακά μεγέθη (αντιδράσεις στήριξης ή/και φορτία διατομής) δεν μπορούν να υπολογιστούν πλήρως με τις συνθήκες ισορροπίας, ονομάζονται στατικώς αόριστοι ή υπερστατικοί. Τέτοιοι είναι π.χ. το κλειστό επίπεδο πλαίσιο του παραδείγματος Δ5 και η συνεχής δοκός δύο ανοιγμάτων του παραδείγματος Δ6. Για το κλειστό πλαίσιο αρκούν μεν οι συνθήκες ισορροπίας για τον υπολογισμό των αντιδράσεών του, όχι όμως και για τον υπολογισμό των εσωτερικών εντασιακών του μεγεθών. Συνεπώς ο ισοστατικά εδραζόμενος υπερστατικός αυτός φορέας μπορεί να χαρακτηριστεί ως εσωτερικά υπερστατικός. Αντίθετα, η δοκός δύο ανοιγμάτων αποτελεί αποσπασμένη από τις στηρίξεις της έναν εσωτερικά ισοστατικό δίσκο, ο οποίος εδράζεται υπερστατικά. Ο υπολογισμός των εντασιακών μεγεθών υπερστατικών φορεών (είτε αυτοί είναι εσωτερικά υπερστατικοί και ισοστατικά εδραζόμενοι δίσκοι/σώματα είτε είναι υπερστατικά εδραζόμενοι δίσκοι/σώματα είτε και τα δύο μαζί) δεν μπορεί να επιτευχθεί μόνο με τη βοήθεια των συνθηκών ισορροπίας, αλλά απαιτεί και τη θεώρηση των παραμορφώσεών τους. Πιο συγκεκριμένα, εκτός από την ικανοποίηση των συνθηκών ισορροπίας απαιτεί την ικανοποίηση των συνθηκών συμβιβαστού σε συνάρτηση με τους καταστατικούς νόμους του υλικού από το οποίο είναι κατασκευασμένος ο φορέας. Στις κλασικές μεθόδους υπολογισμού υπερστατικών φορέων, οι οποίες εξασφαλίζουν την ικανοποίηση και των τριών βασικών συνθηκών της Στατικής, θα γίνει σύντομη αναφορά στο κεφάλαιο 5, ενώ η λεπτομερής και διεξοδική τους παρουσίαση αποτελεί αντικείμενο του δεύτερου τόμου [Αβρ-ΙΙ] του παρόντος συγγράμματος.
3-105
Σ T
A Τ
Ι Κ Η
Ι

Κεφάλαιο 3. Θεμελιώδεις αρχές της Στατικής των γραμμικών φορέων
3.2.10 Οι διαφορικές εξισώσεις ισορροπίας του γραμμικού στοιχείου Α. Η κατάστρωση των διαφορικών εξισώσεων 1ης τάξης Με τις έννοιες που εισήχθησαν στις προηγούμενες παραγράφους μπορούμε τώρα να καταστρώσουμε τις εξισώσεις ισορροπίας ενός απειροστού μήκους γραμμικού στοιχείου δοκού. Από τις εξισώσεις αυτές θα προκύψουν οι συνθήκες ισορροπίας υπό μορφή διαφορικών εξισώσεων, οι οποίες έχουν πολλαπλή χρησιμότητα για τις μετέπειτα αναπτύξεις. Προς τούτο αποσπούμε με δύο νοητές τομές από έναν φορτιζόμενο και ισορροπούντα επίπεδο γραμμικό φορέα που βρίσκεται στο επίπεδο x-z ένα τμήμα του με απειροστό μήκος dx και σχεδιάζουμε γι' αυτό το διάγραμμα ελευθέρου σώματος (Σημ.: Περιοριζόμαστε εδώ σε επίπεδους φορείς χάριν απλούστευσης. Η διατύπωση των αντίστοιχων εξισώσεων για ένα απειροστό στοιχείο στον χώρο γίνεται με ανάλογο τρόπο και δεν παρουσιάζει καμία ιδιαίτερη δυσκολία). Προκειμένου δηλαδή, σύμφωνα με τις αναπτύξεις της παραγράφου 3.2.6-Α, να διατηρήσουμε την ισορροπία του αποσπασμένου από τον υπόλοιπο φορέα απειροστού στοιχείου dx, το φορτίζουμε με όλα τα εξωτερικά φορτία που ενεργούν σ' αυτό και με όλα τα φορτία διατομής που αναπτύσσονται στα δύο του άκρα (Σχ. 3.2.10-1).
XZ
q m n Tm
αφόρτιστηάτονηαπαραμόρφωτηκατάσταση(αρχικήκατάσταση)
∏∏
∏ ∏
dx
dxxdxx+
MT(x+dx)= MT(x)+dMT(x)M(x+dx)=M(x)+dM(x)
N(x+dx)=N(x)+dN(x)Q(x+dx)=Q(x)+dQ(x)
MT(x)
N(x)
Q(x)M(x)
απαραμόρφωτο στοιχείοστην αρχική κατάσταση
qmnTm
μετατοπισμένο και παραμορφωμένοστοιχείο στην κατάσταση ισορροπίαςμετά τη φόρτιση του φορέα
παραμορφωμένηκατάσταση μετάτη φόρτιση
Σχ. 3.2.10-1 Ισορροπούν γραμμικό στοιχείο απειροστού μήκους dx στο επίπεδο x-z με όλες
τις ενδεχόμενες φορτίσεις. 3-112
Σ T
A Τ
Ι Κ Η
Ι

ΣΤΑΤΙΚΗ ΤΩΝ ΚΑΤΑΣΚΕΥΩΝ - Τόμος Ι - Θεμελιώδεις αρχές και ισοστατικοί φορείς
Η φόρτιση που ασκείται στο επίπεδο γραμμικό στοιχείο περιλαμβάνει στη γενική περίπτωση
• εγκάρσια φορτία q(x), • καμπτικές ροπές m(x), • αξονικά φορτία n(x) και • στρεπτικές ροπές mΤ(x)
σε συνεχή κατανομή, η οποία λόγω του απειροστού μήκους του στοιχείου θεωρείται σταθερή μεταξύ των άκρων του. Τα εξωτερικά αυτά φορτία θεωρούνται ως δρώντα επί του κεντροβαρικού άξονα του στοιχείου. Τα φορτία διατομής στο αριστερό άκρο του απειροστού στοιχείου (αρνητική όχθη τομής) είναι
• η καμπτική ροπή Μ(x), • η τέμνουσα δύναμη Q(x), • η αξονική δύναμη Ν(x) και • η στρεπτική ροπή ΜΤ(x),
ενώ τα φορτία διατομής στο δεξιό άκρο του (θετική όχθη τομής) Μ(x+dx), Q(x+dx), Ν(x+dx) και ΜΤ(x+dx) μεταβάλλονται κατά τις απειροστές μεταβολές dM(x), dQ(x), dN(x) και dMΤ(x). Προχωρούμε τώρα στην κατάστρωση των τεσσάρων συνθηκών ισορροπίας που πρέπει να ικανοποιούνται, δηλαδή
(α) της συνθήκης ισορροπίας δυνάμεων κατά x: ΣFix=0,
(β) της συνθήκης ισορροπίας δυνάμεων κατά z: ΣFiz=0,
(γ) της συνθήκης ισορροπίας ροπών κάμψης ως προς το δεξιό άκρο: ΣΜiy=0
και
(δ) της συνθήκη ισορροπίας των ροπών στρέψης ΣΜix=0,
όπου ο δείκτης i αναφέρεται σε κάθε δύναμη ή ροπή που οφείλει να αθροισθεί. Οι εξισώσεις αυτές, καταστρωμένες στο απαραμόρφωτο στοιχείο, δίνονται στο μεσαίο τμήμα του ακόλουθου πίνακα 3.2.10-1.
Σημείωση:
Τονίζεται και πάλι στο σημείο αυτό ότι η ισορροπία ενός φορέα και οποιουδήποτε τμήματός του αναφέρεται ουσιαστικά στην παραμορφωμένη κατάστασή του και ότι, συνεπώς, οι εξισώσεις ισορροπίας οφείλουν να καταστρώνονται στην κατάσταση αυτή (θεωρία 2ης ή ανώτερης τάξης). Όπως όμως επισημάνθηκε στη παράγραφο 3.2.8, πάρα πολύ συχνά, αν και όχι πάντα, η εφαρμογή της θεωρίας 1ης τάξης, δηλαδή η αγνόηση των παραμορφώσεων και μετακινήσεων κατά την κατάστρωση των συνθηκών ισορροπίας, μας παρέχει ρεαλιστικά αποτελέσματα με αποδεκτή προσέγγιση της πραγματικής συμπεριφοράς του φορέα.
3-113
Σ T
A Τ
Ι Κ Η
Ι

Κεφάλαιο 3. Θεμελιώδεις αρχές της Στατικής των γραμμικών φορέων
Πίνακας 3.2.10-1 Διαφορικές εξισώσεις ισορροπίας γραμμικού στοιχείου δοκού στο επίπεδο x-z
(Θεωρία 1ης τάξης)
Απειροστό στοιχείο Είδη φορτίων
∏∏
dxdxx+z
x
ΘΑ
∏∏
dx
q(x)
εγκάρσιαφόρτιση
∏∏
dx
m(x)
φόρτιση μεκαμπτικέςροπές
∏∏
dxαξονικήφόρτιση
n(x)
∏∏
dx
m
φόρτιση μεστρεπτικέςροπές
(x)Τ
∏
dx
ΘΑ ∏ MT +dMTMTQ +dQ
N+dN
Q
NM
qmn
Tm
M+dM
θετική όχθη Θαρνητική όχθη Α
Εξισώσεις ισορροπίας
( ) ( )
( ) (
( ) ( ) ( )
)
[ ] ( )
( ) δ 0dxmMdMM0M
γ 02dxqdxmdxQMdMM0M
β 0dxqQdQQ0F
α 0dxnNdNN0F
ΤΤΤΤx
2Θy
iz
ix
τάξης ανώτερης μέγεθος αμελητέο
=+−+⇒=
=++−−+⇒=
=+−+⇒=
=+−+⇒=
•
•••
•
•
∑
∑∑∑
44 344 21
( )
Διαφορικές εξισώσεις ισορροπίας
Για φόρτιση με εγκάρσιες δυνάμεις και καμπτικές ροπές:
dxdmq
dxMd
mQdxdM
qdxdQ
2
2
−−=
−=
−=
Για αξονική φόρτιση:
ndxdN
−=
Για στρεπτική φόρτιση:
TT m
dxdM
−=
Απαλείφοντας στις εξισώσεις ισορροπίας (α) έως (δ) τα μεγέθη που εμφανίζονται διπλά, αλλά με διαφορετικό πρόσημο, θεωρώντας αμελητέες τις συνεισφορές ανώτερης τάξης (βλ. εξίσωση (γ) στον πίνακα 3.2.10-1) και διαιρώντας δια του μήκους dx προκύπτουν οι ζητούμενες διαφορικές εξισώσεις για το επίπεδο γραμμικό στοιχείο δοκού (Σημ.: Παραλείπεται η τετμημένη x):
3-114
Σ T
A Τ
Ι Κ Η
Ι

ΣΤΑΤΙΚΗ ΤΩΝ ΚΑΤΑΣΚΕΥΩΝ - Τόμος Ι - Θεμελιώδεις αρχές και ισοστατικοί φορείς
(3.2.10-1α,β,γ,δ) TT
2
2
mdx
dMndxdN
dxdmq
dxMd
mQdxdMq
dxdQ
−=−=
−−=
−=−=4444 34444 21
(3.2.10-1ε)
Ακολούθως, για λόγους συντόμευσης, θα χρησιμοποιείται ως σύμβολο διαφόρισης (ή παραγώγισης) ένας τόνος ' στη δεξιά πλευρά του μεγέθους [...] που παραγωγίζεται:
[ ] [ ]dx....d' .... =
Με τον συμβολισμό αυτόν οι διαφορικές εξισώσεις ισορροπίας γράφονται ως εξής:
(3.2.10-2α,β,γ,δ) = − = − = − = −
= − −144424443 T TQ' q, M' Q m, N' n, M ' m
M'' q m'
(3.2.10-2ε)
Από τις διαφορικές αυτές εξισώσεις ισορροπίας 1ης τάξης συνάγεται ότι η πρώτη παράγωγος της τέμνουσας ισούται με το αρνητικό εγκάρσιο φορτίο, η πρώτη παράγωγος της ροπής κάμψης ισούται με την τέμνουσα μειωμένη κατά το συνεχές φορτίο καμπτικών ροπών,
η πρώτη παράγωγος της αξονικής δύναμης ισούται με την αρνητική αξονική φόρτιση, και
η πρώτη παράγωγος της ροπής στρέψης ισούται με το αρνητικό φορτίο στρεπτικών ροπών.
Επίσης, από τις δύο πρώτες διαφορικές εξισώσεις προκύπτει η διαφορική εξίσωση
= − −M'' q m' (3.2.10-3α)
από την οποία συνάγεται ότι στην περίπτωση που το συνεχές φορτίο ροπών κάμψης είναι σταθερό, η δεύτερη παράγωγος της καμπτικής ροπής ισούται με το αρνητικό εγκάρσιο φορτίο:
( )= − =M'' q για m σταθ. (3.2.10-3β)
Όπως σημειώθηκε στην αρχή αυτής της υποπαραγράφου, οι παραπάνω διαφορικές εξισώσεις ισορροπίας έχουν πολλαπλή χρησιμότητα στη Στατική. Εκτός του ότι είναι απαραίτητες (μαζί με τις διαφορικές εξισώσεις οι οποίες εκφράζουν τις συνθήκες συμβιβαστού των παραμορφώσεων και θα αναπτυχθούν στην παράγραφο 3.3) για την ολοκλήρωση της διατύπωσης του προβλήματος της στατικής συμπεριφοράς γραμμικών στοιχείων, χρησιμοποιούνται με διάφορους τρόπους που θα γνωρίσουμε σε ακόλουθες παραγράφους για τον υπολογισμό των φορτίων διατομής και των διαγραμμάτων τους, καθώς βέβαια και για τον έλεγχο αποτελεσμάτων που προέκυψαν με διάφορες άλλες μεθόδους υπολογισμού.
3-115
Σ T
A Τ
Ι Κ Η
Ι

Κεφάλαιο 3. Θεμελιώδεις αρχές της Στατικής των γραμμικών φορέων
Β. Η αποσύζευξη της κάμψης-διάτμησης από τη διάταση και τη στρέψη Ένα πρώτο συμπέρασμα που συνάγεται από την προσεκτική παρατήρηση των παραπάνω διαφορικών εξισώσεων είναι ότι τόσο η αξονική δύναμη, όσο και η στρεπτική ροπή ενός επίπεδου ευθύγραμμου γραμμικού στοιχείου είναι ανεξάρτητες από την καμπτική ροπή και την τέμνουσα δύναμη. Αυτό σημαίνει ότι το φαινόμενο της κάμψης-διάτμησης είναι ανεξάρτητο από το φαινόμενο της διάτασης (θλίψης-εφελκυσμού) και της στρέψης. Είναι σαφές ότι η αποσύζευξη αυτή της καμπτικής από τη διατατική και στρεπτική ένταση ενός στοιχείου ανάγεται στην κατάστρωση των εξισώσεων ισορροπίας στο απαραμόρφωτο ευθύγραμμο στοιχείο (θεωρία 1ης τάξης) και δεν ισχύει στο πλαίσιο θεωριών ανώτερης τάξης.
Γ. Ιδιότητες των διαγραμμάτων φορτίων διατομής Επίσης, ιδιαίτερα χρήσιμα είναι τα συμπεράσματα που απορρέουν από τις παραπάνω διαφορικές εξισώσεις ισορροπίας σχετικά με τη μορφή των διαγραμμάτων των φορτίων διατομής (βλ. παράγρ. 3.2.6-Ε). Π.χ., εύκολα βλέπει κανείς από την εξίσωση Q'=-q ότι η έλλειψη φορτίου q σε ένα τμήμα δοκού συνεπάγεται σταθερή τέμνουσα Q στο τμήμα αυτό, όπως επίσης από την Μ'=Q (για m=σταθ.) ότι οι τέμνουσες δυνάμεις ενός τμήματος δοκού είναι μηδενικές, αν η ροπή κάμψης στο τμήμα αυτό είναι σταθερή. Οι διάφορες αυτές ιδιότητες των διαγραμμάτων των φορτίων διατομής, οι οποίες προκύπτουν από τις διαφορικές εξισώσεις ισορροπίας, θα δοθούν πινακοποιημένες για μία σειρά συνήθων περιπτώσεων φόρτισης στην παράγραφο 6.5.2 του κεφαλαίου 6.
Δ. Η ολοκλήρωση των διαφορικών εξισώσεων ισορροπίας Η επίλυση (ολοκλήρωση) των διαφορικών εξισώσεων ισορροπίας δεν παρουσιάζει ιδιαίτερη δυσκολία. Πρόκειται για γραμμικές διαφορικές εξισώσεις, των οποίων η λύση είναι το άθροισμα Λ = Λομ + Λειδ, δηλαδή το άθροισμα
(α) της λύσης Λομ της αντίστοιχης ομογενούς διαφορικής εξίσωσης, που είναι ένα γενικό ολοκλήρωμα, και
(β) μιας ειδικής λύσης Λειδ της δεδομένης διαφορικής εξίσωσης, που είναι ένα ειδικό ολοκλήρωμα.
Έτσι, για τη διαφορική εξίσωση της αξονικής δύναμης Ν'(x)=-n(x) έχουμε για σταθερό n(x)=n:
Αρχική διαφορική εξίσωση: nN' −=
Ομογενής διαφορική εξίσωση: 0N'ομ =
Λύση: Nομ = C1 , όπου C1 η σταθερά ολοκλήρωσης
Ειδική λύση της N' = -n για το τμήμα του φορέα από το σημείο x0 έως το x:
( ) ( ) ( )0
x
xειδ xxndxnxN
0
−−=−= ••∫
3-116
Σ T
A Τ
Ι Κ Η
Ι

ΣΤΑΤΙΚΗ ΤΩΝ ΚΑΤΑΣΚΕΥΩΝ - Τόμος Ι - Θεμελιώδεις αρχές και ισοστατικοί φορείς
Συνολική λύση: ( ) ( )01ειδομ xxnCΝNxN −−=+= •
Στο σημείο x0 ισχύει: ( ) ( ) 10010 CxxnCxN =−−= •
και άρα: ( ) ( ) ( )00 xxnxNxN −−= • (3.2.10-4)
Επομένως, αν είναι γνωστή η αξονική δύναμη Ν(x0) στο τυχόν σημείο x0 μιας δοκού, μπορεί από τη σχέση (3.2.10-4) να υπολογιστεί η αξονική δύναμη Ν(x) στο σημείο x.
Οι διαφορικές εξισώσεις της τέμνουσας Q'(x)=-q(x) και της ροπής στρέψης MT'(x)=-mT(x) έχουν την ίδια μορφή με τη διαφορική εξίσωση της αξονικής δύναμης, οπότε για σταθερό q(x)= q και σταθερό mT(x)=m παίρνουμε αντιστοίχως τις λύσεις
( ) ( ) ( )00 xxqxQxQ −−= • (3.2.10-5)
και ( ) ( ) ( )0T0TT xxmxMxM −−= • (3.2.10-6)
Επομένως, αν είναι γνωστή η τέμνουσα δύναμη Q(x0) στο τυχόν σημείο x0 μιας δοκού, μπορεί από τη σχέση (3.2.10-5) να υπολογιστεί η τέμνουσα δύναμη Q(x) στο σημείο x. Αντίστοιχα υπολογίζεται η ροπή στρέψης ΜΤ(x) από τη ροπή στρέψης ΜΤ(x0). Τέλος, για τη διαφορική εξίσωση των ροπών κάμψης M'(x)=Q(m)-m(x) παίρνουμε (λαμβάνοντας υπόψη ότι Q'=-q) τη σχέση Μ''(x)=-q(x)-m'(x), η οποία για σταθερό φορτίο m(x)=m απλοποιείται σε:
= −M'' q
Η λύση της διαφορικής αυτής εξίσωσης προκύπτει ως εξής:
Ομογενής διαφορική εξίσωση: =ομM'' 0
Λύση: Mομ(x) = C1 + C2 x , όπου C1 και C2 οι σταθερές ολοκλήρωσης
Ειδική λύση της Μ''=-q για το τμήμα του φορέα από το σημείο x0 έως το x:
( ) ( ) ( ) ( )2
xxqdxxxqdxdxqdxdxqxM2
0x
x0
x
x
x
x
x
x
x
xειδ
00 00 0
−−=−−=
⎥⎥⎦
⎤
⎢⎢⎣
⎡−=
⎥⎥⎦
⎤
⎢⎢⎣
⎡−=
••••••• ∫∫ ∫∫ ∫
Συνολική λύση: ( ) ( )[ ]2xxqxCCMMxM 2021ειδομ −−+=+= ••
και άρα: ( ) ( ) ( ) mxxqCmxM'xQ 02 +−−=+= •
Στο σημείο x0 ισχύουν:
( ) ( ) ( ) ( mxQC mCmxxqCmxM'xQ 02200200 −=→+=+−−=+= • )
( ) ( )[ ] ( )[ ]( ) ( )[ ] 0001
0010212
000210
xmxQxMC
xmxQCxCC2xxqxCCxM
•
••••
−−=→
−+=+=−−+=
3-117
Σ T
A Τ
Ι Κ Η
Ι

Κεφάλαιο 3. Θεμελιώδεις αρχές της Στατικής των γραμμικών φορέων
και άρα:
( ) ( ) ( )[ ] ( )[ ] ( )[ ]( ) ( )[ ] ( ) ( )[ ]2xxqx-xmxQxM
2xxqxmxQxmxQxMxM
20000
200000
−−−+=
−−−+−−=
••
•••
(3.2.10-7)
Επομένως, αν είναι γνωστές στο τυχόν σημείο x0 μιας δοκού η τέμνουσα Q(x0) και η ροπή κάμψης M(x0), μπορεί από τη σχέση (3.2.10-7) να υπολογιστεί η ροπή Μ(x) στο σημείο x.
Παρατηρήσεις: Οι σταθερές Ci στις παραπάνω σχέσεις υπολογίζονται σε κάθε δεδομένη περίπτωση φορέα και φόρτισης από τις συνοριακές συνθήκες, δηλαδή τις συνθήκες στα σημεία στήριξης του φορέα (Σημ.: Σε σύνθετους φορείς λαμβάνονται υπόψη και οι τυχόν ενδιάμεσες συνθήκες στα σημεία σύνδεσης των επιμέρους δομικών στοιχείων). Σε ισοστατικούς φορείς οι συνθήκες αυτές είναι ισάριθμες με τις σταθερές Ci, ενώ σε υπερστατικούς είναι λιγότερες. Έτσι, π.χ., για μία αμφιέρειστη δοκό που φορτίζεται με ένα συνεχές ομοιόμορφο φορτίο q (Σχ. 3.2.10-2(α)) παίρνουμε από τη συνθήκη ισορροπίας ΣPZ=0 στο αριστερό άκρο 1 (x0=0) τη συνοριακή συνθήκη:
( ) ( ) 2LqA0Q Z1 •==
και συνεπώς ισχύει (βλ. εξ. (3.2.10-5):
( ) ( )
( ) ( ) xq0xqxQ
2Lq0QCQ
ειδ
1ομ
••
•
−=−−=
===
και συνολικά:
( ) ( ) ( ) ( ) xq2LqxxqxQxQ 00 ••• −=−−= (3.2.10-8)
Η ειδική λύση Qειδ(x) είναι μια λύση που απλά ικανοποιεί τη διαφορική εξίσωση του εκάστοτε μεγέθους έντασης, εδώ την Q'(x)=-q(x), χωρίς να λαμβάνει υπόψη τις συνοριακές συνθήκες που ισχύουν στην κάθε συγκεκριμένη περίπτωση (Σχ.3.2.10-2(β)). Η "διόρθωσή" της, δηλαδή η προσαρμογή της στη συγκεκριμένη περίπτωση φορέα και φόρτισης γίνεται προσθέτοντας σ' αυτήν την ομογενή λύση Qομ. Το διάγραμμα της ομογενούς λύσης χαρακτηρίζεται συχνά ως "κλείουσα". Η τελική λύση προκύπτει με "κρέμασμα" (δηλαδή αλγεβρική πρόσθεση) του διαγράμματος της ειδικής λύσης στην κλείουσα (Σχ. 3.2.10-2(γ), αριστερά). Στο σχήμα 3.2.10-2 φαίνεται και η αντίστοιχη άθροιση ειδικής και ομογενούς λύσης για τις ροπές κάμψης. Για τις συνοριακές συνθήκες στο αριστερό άκρο 1 (x0=0) έχουμε:
από τη συνθήκη ισορροπίας ΣPZ=0: ( ) ( ) 2LqA0Q Z1 •==
λόγω της άρθρωσης: ( ) 00M =
3-118
Σ T
A Τ
Ι Κ Η
Ι

ΣΤΑΤΙΚΗ ΤΩΝ ΚΑΤΑΣΚΕΥΩΝ - Τόμος Ι - Θεμελιώδεις αρχές και ισοστατικοί φορείς
και συνεπώς ισχύει για τις σταθερές C1, C2:
( ) ( )[ ]( ) ( ) 2Lqm0QC
0xm0Q0MC
2
01
•
•
=−=
=−−=
οπότε ( )[ ]
( ) ( )[ ] ( ) 2xq2xxqxM
x2LqxCCM
220ειδ
21ομ
••
•••
−=−−=
=+=
και συνολικά: ( ) ( )[ ] ( ) 2xqx2LqxM 2
••• −=
1 2
qx
AZ1= q ∏L/2
M1=0
L(α) Ισοστατικός φορέας με συγκεκριμένη στήριξη (συνοριακές συνθήκες) και φόρτιση
x
Qειδ =-(x) q ∏x
- -q ∏Lx Mειδ =-(x) q ∏x
-
-q ∏L2 /2
2/2
(β) Επιλεγείσες ειδικές λύσεις για τέμνουσα δύναμη και ροπή κάμψης
x
Qομ =(x) q ∏L
-
-q ∏Lx M =((x) q ∏L
q ∏L2/8
/2
(γ) Προσαρμογή της ειδικής λύσης στις συνοριακές συνθήκες
/2
+q ∏L/2
Q =(x) q ∏L -q ∏x/2
/2κλείουσα
-q ∏x2/2) ∏x
=((x) q ∏L/2) ∏xκλείουσαMομ
+
με "κρέμασμά" της στην "κλείουσα" Σχ. 3.2.10-2 Πρόσθεση ("κρέμασμα") της ειδικής λύσης στην ομογενή λύση ("κλείουσα")
Αν και οι διαφορικές εξισώσεις μας είναι ιδιαιτέρως χρήσιμες κατά τον υπολογισμό των φορτίων διατομής και των διαγραμμάτων τους, η άμεση ολοκλήρωσή τους για συγκεκριμένα προβλήματα της πράξης, όπως έγινε για το απλό παράδειγμα του σχήματος 3.2.10-2, σπανίως βρίσκει εφαρμογή στη Στατική των Κατασκευών. Σημειώνεται όμως ότι στις λύσεις των διαφορικών αυτών εξισώσεων βασίζεται μία χρησιμότατη μέθοδος υπολογισμού εντασιακών και παραμορφωσιακών μεγεθών: η Μέθοδος των Μητρώων Μεταβίβασης.
3-119
Σ T
A Τ
Ι Κ Η
Ι

Σ T
A Τ
Ι Κ Η
Ι

ΣΤΑΤΙΚΗ ΤΩΝ ΚΑΤΑΣΚΕΥΩΝ - Τόμος Ι - Θεμελιώδεις αρχές και ισοστατικοί φορείς
…………… ……………
Οι σελίδες 3-120 έως 3-194 παραλείπονται. …………… ……………
3.6 Οι εργικές προτάσεις - Εισαγωγική παρουσίαση 3.6.1 Εισαγωγή
Όπως γνωρίζουμε (βλ. παράγρ. 3.5.1), τα δύο "βασικά" υπολογιστικά προβλήματα της Στατικής των Κατασκευών είναι (1) ο υπολογισμός των εντάσεων και (2) ο υπολογισμός των παραμορφώσεων που αναπτύσσονται σε έναν δομικό φορέα λόγω της εκάστοτε δεδομένης φόρτισής του (σταθερές ή/και μεταβλητές δράσεις, φορτία ή/και καταναγκασμοί). Ο υπολογισμός της έντασης και της παραμόρφωσης πρέπει γενικώς να γίνεται με τέτοιο τρόπο ώστε τα προκύπτοντα αποτελέσματα να ικανοποιούν αφενός τις συνθήκες ισορροπίας και αφετέρου τις συνθήκες συμβιβαστού, σε συνδυασμό βέβαια πάντοτε με τους νόμους υλικής συμπεριφοράς. Αυτό επιτυγχάνεται π.χ. με ολοκλήρωση των διαφορικών εξισώσεων που διέπουν τη στατική συμπεριφορά των φορέων μέσα στο πλαίσιο των παραδοχών της εκάστοτε εφαρμοζόμενης υπολογιστικής θεωρίας και την εν συνεχεία χρησιμοποίηση των αναλυτικών λύσεων για τον αριθμητικό προσδιορισμό οποιουδήποτε εντασιακού ή παραμορφωσιακού μεγέθους.
Εντούτοις, η αναλυτική επίλυση (δηλαδή η ολοκλήρωση) των διαφορικών εξισώσεων λαμβανομένων υπόψη των εκάστοτε συνοριακών συνθηκών είναι πρακτικώς δυνατή μόνο σε λίγες, σχετικά απλές, περιπτώσεις φορέων και φορτίσεων της δομικής πράξης. Γι’ αυτό στη Στατική των Κατασκευών χρησιμοποιούνται κατά κανόνα άλλες, υπολογιστικά αποτελεσματικότερες και ταυτόχρονα απλούστερες, μέθοδοι υπολογισμού, οι οποίες στηρίζονται σε δύο θεμελιώδεις αρχές: στην αρχή των δυνατών έργων (ΑΔΕ) και στην αρχή των συμπληρωματικών δυνατών έργων (ΑΣΔΕ). Οι δύο αυτές εργικές αρχές ή εργικές προτάσεις επιτρέπουν με λιγότερο ή περισσότερο άμεσο τρόπο τον υπολογισμό οποιουδήποτε μεγέθους έντασης ή παραμόρφωσης.
Η ΑΔΕ, η οποία ονομάζεται και αρχή των νοητών ή δυνατών μετακινήσεων, βρίσκεται σε αμφιμονοσήμαντη σχέση με τις συνθήκες ισορροπίας και συνεπώς μπορεί να τις αντικαταστήσει πλήρως.
Η ΑΣΔΕ, η οποία ονομάζεται και αρχή των νοητών ή δυνατών εντάσεων ή και αρχή των νοητών ή δυνατών ή βοηθητικών φορτίων ή δυνάμεων, βρίσκεται σε αμφιμονοσήμαντη σχέση με τις συνθήκες συμβιβαστού (λαμβάνοντας υπόψη τους νόμους υλικής συμπεριφοράς) και συνεπώς μπορεί να τις αντικαταστήσει πλήρως.
Η ΑΔΕ και η ΑΣΔΕ χαρακτηρίζονται ως εργικές προτάσεις (Σημ.: Συχνά χαρακτηρίζονται και ως ενεργειακές, αν και αυτό είναι προτιμότερο να αποφεύγεται), διότι η ισχύς τους προκύπτει επαγωγικά από τις συνθήκες ισορροπίας και συμβιβαστού (λαμβάνοντας υπόψη τους νόμους υλικής συμπεριφοράς) αντίστοιχα.
3-195
Σ T
A Τ
Ι Κ Η
Ι

Κεφάλαιο 3. Θεμελιώδεις αρχές της Στατικής των γραμμικών φορέων
Χαρακτηρίζονται όμως και ως εργικές αρχές, διότι όπως θα δούμε μπορούν να χρησιμοποιηθούν αυτοδύναμα, αντικαθιστώντας πλήρως τις συνθήκες ισορροπίας και συμβιβαστού.
Στις επόμενες παραγράφους θα διατυπωθούν με συγκεκριμένο τρόπο οι δύο παραπάνω εργικές προτάσεις και θα τεκμηριωθεί η ισχύς τους με βάση γενικότερους ενεργειακούς συλλογισμούς. Αργότερα, στο κεφάλαιο 8, θα διατυπωθούν οι σχετικές εκφράσεις σε πληρέστερη μορφή και θα δοθεί η τυπική μαθηματική τους απόδειξη για ελαστικούς γραμμικούς φορείς, οι οποίοι αποτελούν το αντικείμενο του παρόντος συγγράμματος.
Για τις ακόλουθες αναπτύξεις θα χρησιμοποιηθεί ως παράδειγμα μια αμφιέρειστη (ισοστατική) δοκός υπό μοναχικό φορτίο F στο μέσο του φατνώματος (Σχ. 3.6.1-1). Χάριν απλούστευσης της εδώ παρουσίασης - χωρίς όμως αυτό να σημαίνει περιορισμό της γενικότητας των αναπτυσσόμενων συλλογισμών - η δοκός θεωρείται άτμητη (GASض) και ατενής (EAض).
L/2 L/2
F
ΕΙ =πεπερ.GA S
ww(x)x
M(x) M
ض
EA
21
ض
Σχ. 3.6.1-1 Ένταση και παραμόρφωση μιας απλής αμφιέρειστης δοκού
Ο υπολογισμός της κατάστασης έντασης και παραμόρφωσης της δοκού του σχήματος 3.6.1-1 μπορεί να θεωρηθεί ότι επί της ουσίας έχει επιτευχθεί, αν προσδιοριστεί η ροπή Μ(x) και η βύθιση w(x) στο τυχόν σημείο x της δοκού. Η ροπή Μ(x), η οποία "περιγράφει" την ισορροπούσα κατάσταση έντασης, μπορεί να υπολογιστεί με τη βοήθεια της ΑΔΕ, αφού η τελευταία είναι - όπως θα δούμε - ισοδύναμη με τις συνθήκες ισορροπίας. Η βύθιση w(x), η οποία "περιγράφει" τη συμβιβαστή (γεωμετρικά και υλικά) κατάσταση παραμόρφωσης, μπορεί να υπολογιστεί με την ΑΣΔΕ, αφού η τελευταία είναι - όπως θα δούμε - ισοδύναμη με τις συνθήκες συμβιβαστού.
Πριν όμως προχωρήσουμε στη διενέργεια των υπολογισμών για την εύρεση της ροπής Μ(x) και της βύθισης w(x) είναι σκόπιμο να υπενθυμίσουμε και να διευκρινίσουμε ορισμένες, γνωστές από τη στοιχειώδη Μηχανική, βασικές έννοιες (όπως "έργο" και "ενέργεια" στην παράγραφο 3.6.2, "δυνατά έργα" και "συμπληρωματικά δυνατά έργα" στην παράγραφο 3.6.3) και να διατυπώσουμε, με τη σχετική αιτιολόγηση, τις δύο εργικές αρχές (παράγραφοι 3.6.4-Α και 3.6.5-Α).
3-196
Σ T
A Τ
Ι Κ Η
Ι

ΣΤΑΤΙΚΗ ΤΩΝ ΚΑΤΑΣΚΕΥΩΝ - Τόμος Ι - Θεμελιώδεις αρχές και ισοστατικοί φορείς
3.6.2 Έργο και ενέργεια Σύμφωνα με τους ορισμούς που δόθηκαν στην παράγραφο 3.3.2, το έργο παραμόρφωσης We που παράγει το τυχόν φορτίο F ενός φορέα επί της μετατόπισης w του σημείου εφαρμογής του κατά την ίδια διεύθυνση και φορά ισούται γενικώς με
∫ •=w
0e dwFW (3.6.2-1)
Ο δείκτης e δείχνει ότι πρόκειται για εξωτερικό έργο, δηλαδή για το έργο μιας εξωτερικής δύναμης (δηλαδή ενός φορτίου) F, σε αντίθεση προς το εσωτερικό έργο που παράγεται, όπως θα δούμε αμέσως πιο κάτω, από τα εσωτερικά εντασιακά μεγέθη που αναπτύσσονται μέσα στον φορέα (δηλαδή στις διατομές του).
Στην περίπτωση που η μετατόπιση w δεν οφείλεται στη δράση του ίδιου του φορτίου F, αλλά είναι ανεξάρτητη από αυτό, όταν δηλαδή δεν υφίσταται σχέση αιτιότητας μεταξύ F και w [δηλαδή F≠F(w)], το παραγόμενο έργο ονομάζεται παθητικό εξωτερικό έργο παραμόρφωσης, χαρακτηρίζεται με τον επιπλέον δείκτη p και ισούται με:
( ) wFdwF W:wFFw
0ep •• ==≠ ∫ (3.6.2-2)
Στην περίπτωση που η μετατόπιση w οφείλεται στη δράση του φορτίου F και συνεπώς συναρτάται με αυτό, όταν δηλαδή υφίσταται σχέση αιτιότητας μεταξύ F και w [δηλαδή F=F(w)], το παραγόμενο έργο ονομάζεται ίδιο εξωτερικό έργο παραμόρφωσης και ισούται με:
( ) ( )∫ •==w
0e dwwF W:wFF (3.6.2-3)
Ο δείκτης α που χρησιμοποιήθηκε στην παράγραφο 3.3.2 για τον χαρακτηρισμό του ίδιου έργου παραλείπεται εδώ χάριν απλούστευσης των συμβολισμών.
Γενικώς, η συνάρτηση F(w) είναι μη γραμμική, όπως π.χ. στην περίπτωση που το υλικό δεν είναι ελαστικό ή όταν λαμβάνονται υπόψη μεγάλες (πεπερασμένες, μη απειροστές) μετακινήσεις. Στις περιπτώσεις που η συνάρτηση F(w) είναι γραμμική, δηλαδή F=c·w (όπου c μία σταθερά), το εξωτερικό έργο παραμόρφωσης ισούται με:
wF21wc
21dwwc W:wcF 2
w
0e ••••••• ==== ∫ (3.6.2-4)
Η έκφραση αυτή ισχύει και για το παράδειγμά μας του σχήματος 3.6.1-1, αφού μέσα στα πλαίσια της Γραμμικής Ελαστοστατικής, εντός των οποίων κινούμαστε, όλες οι σχέσεις μεταξύ των διαφόρων εντασιακών και παραμορφωσιακών μεγεθών είναι γραμμικές (ελαστική θεωρία 1ης τάξης, βλ. παράγρ. 3.5.1-Α).
3-197
Σ T
A Τ
Ι Κ Η
Ι

Κεφάλαιο 3. Θεμελιώδεις αρχές της Στατικής των γραμμικών φορέων
Παρατηρούμε ότι λόγω της γραμμικής εξάρτησης της μετατόπισης από το φορτίο (επειδή δηλαδή το φορτίο δεν έχει εξαρχής την τελική του τιμή, αλλά αυξάνει αναλογικά με τις μετακινήσεις) υπεισέρχεται στην έκφραση (3.6.2-4) που ορίζει το ίδιο έργο We ο συντελεστής ½, ο οποίος δεν υπάρχει στην έκφραση (3.6.2-3) του παθητικού έργου παραμόρφωσης Wep.
Υπό τη δράση του εξωτερικού φορτίου F η αμφιέρειστη δοκός του σχήματος 3.6.1-1 υφίσταται παραμόρφωση, ενώ παράλληλα αναπτύσσονται αντίστοιχες εσωτερικές εντάσεις. Στο παράδειγμά μας δημιουργούνται μόνο καμπτικές παραμορφώσεις, οι οποίες εκφράζονται μέσω της καμπυλότητας κ (Σημ.: Οι διατμητικές και αξονικές παραμορφώσεις είναι λόγω των παραδοχών της ατμησίας GAsض και της ατένειας EAض εξ ορισμού μηδενικές, ασχέτως φόρτισης). Παράλληλα με την καμπύλωση της δοκού αναπτύσσονται στις διατομές της ροπές κάμψης και αντίστοιχες τέμνουσες δυνάμεις Q, ενώ οι αξονικές δυνάμεις Ν είναι προφανώς (ελλείψει αξονικών φορτίων) μηδενικές. Παρατήρηση: Το γεγονός ότι οι παραμορφώσεις ενός φορέα είναι μηδενικές, δεν σημαίνει ότι και οι αντίστοιχες εντάσεις είναι μηδενικές. Αντίθετα: Όταν η ένταση είναι μηδενική, τότε η αντίστοιχη παραμόρφωση είναι επίσης μηδενική. Έτσι, στο παράδειγμά μας οι διατμητικές παραμορφώσεις είναι μηδενικές (λόγω της παραδοχής της ατμησίας), όχι όμως και οι τέμνουσες δυνάμεις. Επίσης, επειδή οι αξονικές δυνάμεις είναι - ελλείψει αξονικών φορτίων - μηδενικές, οι αξονικές παραμορφώσεις θα είναι και αυτές μηδενικές, ακόμη και αν άρουμε την παραδοχή της ατένειας.
Τα κατά την παραμόρφωση της δοκού αναπτυσσόμενα εσωτερικά εντασιακά μεγέθη εκφράζουν την "αντίσταση" της δοκού στην προκαλούμενη λόγω του φορτίου F παραμόρφωσή της. Με άλλα λόγια, τα εσωτερικά εντασιακά μεγέθη (Μ, Q, N) "αντιτίθενται" στις εργικώς ανταποκρινόμενες σ’ αυτά παραμορφώσεις (κ, γ, ε - βλ. παράγρ. 3.3.5), δηλαδή έχουν φορά αντίθετη προς αυτές και συνεπώς παράγουν επ’ αυτών αρνητικό έργο. Στη θεώρηση αυτή, τα εσωτερικά εντασιακά μεγέθη δεν ταυτίζονται εννοιολογικά με τα φορτία διατομής, παρόλο που αριθμητικά είναι ίσα με αυτά. Έτσι, σε ένα απειροστό στοιχείο dx που αποσπάται από τη δοκό, τα φορτία διατομής δρουν ως εξωτερικά φορτία επί των δύο διατομών του, ενώ τα ίσα και αντίθετα προς αυτά εσωτερικά εντασιακά μεγέθη είναι οι "δυνάμεις συνοχής" που "φροντίζουν" για τη διατήρηση του στοιχείου ως συνεχούς μέσου, αντιστεκόμενες στις έξωθεν προκαλούμενες παραμορφώσεις του.
Η παραπάνω θεώρηση απεικονίζεται στο σχήμα 3.6.2-1 για την περίπτωση της άτμητης και ατενούς δοκού, όπου η μόνη παραμόρφωση είναι η καμπύλωση κ και το εργικώς ανταποκρινόμενο φορτίο διατομής είναι η ροπή κάμψης Μ. Το αντίστοιχο εσωτερικό εντασιακό μέγεθος είναι η ροπή ΜU=Μ. Το παραγόμενο από τη ροπή ΜU εσωτερικό έργο είναι αρνητικό, αφού αυτή αντιτίθεται στην αμοιβαία στροφή των ακραίων διατομών του απειροστού στοιχείου (Σημ.: Στην περίπτωση της αμφιέρειστης δοκού μας οι τέμνουσες δυνάμεις Q, αν και υπαρκτές, δεν παράγουν έργο, αφού οι εργικά ανταποκρινόμενες προς αυτές ολισθήσεις γ είναι εξ ορισμού μηδενικές λόγω της παραδοχής GAsض).
3-198
Σ T
A Τ
Ι Κ Η
Ι

ΣΤΑΤΙΚΗ ΤΩΝ ΚΑΤΑΣΚΕΥΩΝ - Τόμος Ι - Θεμελιώδεις αρχές και ισοστατικοί φορείς
∏
dxx
απαραμόρφωτηκατάσταση
∏
∏dφ=κ ∏ dx
παραμορφωμένηκατάσταση
∏
∏dφ=κ ∏ dx
Διατομή x:
M MMUMU
εσωτερικάεντασιακά μεγέθη
φορτίαδιατομής
∏ dφ=κ ∏ dx
MM ∏ ∏
dxx
EI
Γραμμικώς ελαστικό υλικόHooke: Μ(x) = EI(x) ∏ κ(x)
=M
MUMU
MU
Παραγόμενο εσωτερικό έργο παραμόρφωσης στη διατομή x:
Αποθηκευόμενη ενέργεια παραμόρφωσης στη διατομή x:
( ) ( ) ( )∫∫ •• −=−=κ
0
κ
0Ui dκκΜdκκΜxW ( ) κM
21dκκEIxW
κ
0i •••• −=−= ∫
( ) ( ) ( )xWdκκΜxU i
κ
0
−== ∫ • ( ) ( ) κM21xWxU i ••=−=
Σχ. 3.6.2-1 Φορτία διατομής Μ και εσωτερικά εντασιακά μεγέθη ΜU στη διατομή x (για dx=1).
Εσωτερικό έργο παραμόρφωσης Wi και ενέργεια παραμόρφωσης U.
Το παραγόμενο εσωτερικό έργο ισούται
σε κάθε διατομή x με (Σημ.: Το dx θεωρείται εδώ ίσο με 1)
( ) ( )∫ •−=κ
0i dκκΜxW (3.6.2-5)
και για όλη τη δοκό με ( )∫ ∫ •• ⎥⎦
⎤⎢⎣
⎡−=
L
0
κ
0i dxdκκΜ W (3.6.2-6)
Ο δείκτης i δείχνει ότι πρόκειται για εσωτερικό έργο, δηλαδή για το έργο εσωτερικών εντασιακών μεγεθών, σε αντίθεση προς το εξωτερικό έργο που παράγεται από τα δεδομένα φορτία.
3-199
Σ T
A Τ
Ι Κ Η
Ι

Κεφάλαιο 3. Θεμελιώδεις αρχές της Στατικής των γραμμικών φορέων
Στην περίπτωση που οι ροπές Μ δεν σχετίζονται με τις αναπτυσσόμενες καμπυλότητες κ, αλλά είναι ανεξάρτητες από αυτές, δηλαδή όταν δεν υφίσταται σχέση αιτιότητας μεταξύ Μ και κ [δηλαδή Μ≠M(κ)], το έργο ονομάζεται παθητικό εσωτερικό έργο παραμόρφωσης, χαρακτηρίζεται με τον επιπλέον δείκτη p και ισούται για όλη τη δοκό με:
∫∫ ∫∫ ∫ •••••• −=⎥⎦
⎤⎢⎣
⎡−=⎥
⎦
⎤⎢⎣
⎡−=
L
0
L
0
κ
0
L
0
κ
0ip dxκΜdxdκΜ dxdκΜ W (3.6.2-7)
Στην περίπτωση που οι ροπές και οι καμπυλότητες αλληλοεξαρτώνται, δηλαδή όταν υφίσταται σχέση αιτιότητας μεταξύ Μ και κ [δηλαδή Μ=M(κ)], το έργο ονομάζεται ίδιο εσωτερικό έργο παραμόρφωσης και ισούται για όλη τη δοκό με:
( )∫ ∫ •• ⎥⎦
⎤⎢⎣
⎡−=
L
0
κ
0i dxdκκΜ W (3.6.2-8)
Όπως και για το ίδιο εξωτερικό έργο παραμόρφωσης έτσι και εδώ παραλείπεται χάριν απλούστευσης των συμβολισμών ο δείκτης α που χρησιμοποιήθηκε στην παράγραφο 3.3.2 για τον χαρακτηρισμό του ίδιου έργου.
Γενικώς, η συνάρτηση Μ(κ) είναι μη γραμμική, όπως π.χ. στην περίπτωση που το υλικό δεν είναι ελαστικό. Στις περιπτώσεις που η συνάρτηση Μ(κ) είναι γραμμική, όπως συμβαίνει στη Γραμμική Ελαστοστατική όπου ισχύει ο νόμος του Hooke (Μ=ΕΙ·κ, βλ. παράγρ. 3.4.3-Α), το εσωτερικό έργο παραμόρφωσης ισούται για ολόκληρη τη δοκό με:
∫∫∫∫ ∫ ••••••••••• −=−=⎥⎦⎤
⎢⎣⎡−=⎥
⎦
⎤⎢⎣
⎡−=
L
0
2L
0
L
0
2L
0
κ
0i dx
EIM
21dxκM
21dxκEI
21 dxdκκEI W (3.6.2-9)
Όπως και για το εξωτερικό έργο παραμόρφωσης, παρατηρούμε και εδώ ότι λόγω της γραμμικής εξάρτησης της ροπής από την καμπυλότητα υπεισέρχεται στην έκφραση που ορίζει το εσωτερικό ίδιο έργο Wi ο συντελεστής ½, ο οποίος δεν υπάρχει στην έκφραση του παθητικού έργου παραμόρφωσης Wip.
Στο ακόλουθο σχήμα 3.6.2-2 δίνονται τα διαγράμματα "φορτίου - μετακίνησης" και "εσωτερικής έντασης - παραμόρφωσης", στα οποία η επιφάνεια κάτω από τις καμπύλες F=F(w) και Μ=Μ(κ) στη μη γραμμική περίπτωση ή κάτω από τις ευθείες F=c·w και Μ=ΕΙ·κ στη γραμμική περίπτωση αντιστοιχεί στο παραγόμενο ίδιο εξωτερικό και εσωτερικό έργο παραμόρφωσης αντίστοιχα.
Για λόγους που θα γίνουν κατανοητοί πιο κάτω εισάγουμε εδώ και την έννοια του συμπληρωματικού ίδιου έργου, το οποίο συμβολίζεται με το γράμμα W με έναν αστερίσκο ως άνω δείκτη: W*. Ως συμπληρωματικό ίδιο εξωτερικό έργο We* ορίζεται το έργο που αντιστοιχεί στην επιφάνεια άνωθεν της καμπύλης F=F(w) [μη γραμμική περίπτωση] ή άνωθεν της ευθείας F=c·w [γραμμική περίπτωση] στα σχετικά διαγράμματα "φορτίου - μετακίνησης". Αντίστοιχα, ως συμπληρωματικό ίδιο εσωτερικό έργο Wi* ορίζεται το έργο που αντιστοιχεί στην επιφάνεια άνωθεν της καμπύλης Μ=Μ(κ) [μη γραμμική περίπτωση] ή άνωθεν της ευθείας Μ=ΕΙ·κ
3-200
Σ T
A Τ
Ι Κ Η
Ι

ΣΤΑΤΙΚΗ ΤΩΝ ΚΑΤΑΣΚΕΥΩΝ - Τόμος Ι - Θεμελιώδεις αρχές και ισοστατικοί φορείς
[γραμμική περίπτωση] στα σχετικά διαγράμματα "εσωτερικής έντασης - παραμόρφωσης" (βλ. Σχ. 3.6.2-2). Ο χαρακτηρισμός "συμπληρωματικό" προκύπτει από το γεγονός ότι η επιφάνεια που αντιστοιχεί στο συμπληρωματικό ίδιο (εσωτερικό ή εξωτερικό) έργο W* "συμπληρώνει" την επιφάνεια που αντιστοιχεί στο ίδιο (εσωτερικό ή εξωτερικό) έργο W, με την έννοια ότι το άθροισμα των δύο επιφανειών ισούται με την επιφάνεια ενός ορθογωνίου (η οποία αποτελεί το μέτρο του αντίστοιχου παθητικού έργου Wp).
Είναι σαφές ότι στη γραμμική περίπτωση τα συμπληρωματικά έργα We* και Wi* ισούνται προς τα έργα We και Wi αντιστοίχως, ενώ στη μη γραμμική περίπτωση διαφέρουν.
w
F
Φορτίο
(γ)
μετακίνηση
Φορτίο
(α)
μετακίνησηw
F
(Εξωτερική ένταση)
(δ)
(β)
(Εσωτερική ένταση)
παραμόρφωση
Φορτίο διατομής
παραμόρφωση
Φορτίο διατομής
κ
Μ
κ
Μ
ee WW ≠∗
( )wFF =
( )∫= w
0 e dwwF W
wF2
1 W e ••=
ii WW ≠∗
( )κMM =
( )∫ ∫ ⎥⎦⎤
⎢⎣⎡−=
L
0
κ
0 i dxdκκM W
ii W W =∗
κEIM •=
( )∫ ••−=L
0 i dxκM2
1 W
wcF •=ee WW =∗
Σχ. 3.6.2-2 Εξωτερικά και εσωτερικά ίδια έργα παραμόρφωσης (We, Wi) και συμπληρωματικά
ίδια έργα παραμόρφωσης (W*e, W*i) για τις περιπτώσεις μη γραμμικής (α,β) και γραμμικής (γ,δ) σχέσης έντασης-παραμόρφωσης
Τέλος, στο σημείο αυτό είναι χρήσιμη και η εισαγωγή της έννοιας της ενέργειας παραμόρφωσης U, προκειμένου αυτή να αντιδιασταλεί προς την έννοια του έργου παραμόρφωσης: Το κατά την παραμόρφωση της ελαστικής δοκού μας παραγόμενο εξωτερικό έργο We δεν χάνεται, αλλά "αποθηκεύεται" («αποταμιεύεται») ως ενέργεια U στο εσωτερικό της δοκού. Προφανώς ισχύει η ισότητα:
UWe = (3.6.2-10)
Η εξίσωση αυτή εκφράζει την αρχή της διατήρησης της ενέργειας για ελαστικά σώματα.
3-201
Σ T
A Τ
Ι Κ Η
Ι

Κεφάλαιο 3. Θεμελιώδεις αρχές της Στατικής των γραμμικών φορέων
Υπενθύμιση: Η ελαστική παραμόρφωση θεωρούμε ότι λαμβάνει χώρα χωρίς τριβές και χωρίς θερμοκρασιακές απώλειες (ισοθερμικά). Επίσης, στο πλαίσιο της Στατικής θεωρούμε ότι η προσαγωγή των εξωτερικών φορτίων γίνεται "απείρως αργά", δηλαδή τα φορτία δεν εφαρμόζονται εξαρχής με την τελική τους τιμή, αλλά αυξάνονται "πολύ αργά" (θεωρητικά: "απείρως αργά") από το μηδέν έως το τελικό τους μέγεθος, έτσι ώστε να μην αναπτύσσονται επιταχύνσεις και η κινητική ενέργεια να είναι μηδενική ("οιονεί στατική φόρτιση").
Σύμφωνα με την (3.6.2-10), έργο και ενέργεια μετρούνται με τις ίδιες μονάδες μέτρησης, παρόλο που εννοιολογικά αποτελούν διαφορετικά φυσικά μεγέθη: Για να παραχθεί έργο απαιτείται ενέργεια και, αντιστρόφως, απαιτείται έργο για να μεταβληθεί η ενέργεια ενός συστήματος. Η παραγωγή του εξωτερικού έργου We συνεπάγεται τη μεταβολή (αύξηση) της ενέργειας παραμόρφωσης U της δοκού. Η αποθηκευμένη στην παραμορφωμένη δοκό ενέργεια U μπορεί με τη σειρά της να παράγει έργο. Πράγματι, το έργο που απελευθερώνεται κατά την αποφόρτιση μιας καμπτόμενης ελαστικής δοκού ισούται με την αποθηκευμένη στην καμφθείσα δοκό ενέργεια U. Μετά το πέρας της αποφόρτισης η ενέργεια της δοκού έχει μειωθεί κατά U και συνεπώς το παραχθέν έργο ισούται με -U. Το έργο αυτό δεν είναι παρά το έργο Wι που παράγουν τα εσωτερικά εντασιακά μεγέθη. Επομένως ισχύει η σχέση (βλ. Σχ. 3.6.2-1, κάτω):
UWi −= (3.6.2-11)
Από τις εξισώσεις (3.6.2-10) και (3.6.2-11) προκύπτει ότι το συνολικά παραγόμενο έργο W είναι ίσο με το μηδέν:
ieei WWή0WWW −==+= (3.6.2-12)
Η εξίσωση αυτή ονομάζεται γενική εργική ή ενεργειακή πρόταση της Στατικής και όντας μια διαφορετική διατύπωση της (3.6.2-10) εκφράζει και αυτή την αρχή της διατήρησης της ενέργειας. Εισάγοντας στην ισότητα U=We=-Wi τις σχέσεις (3.6.2-4) και (3.6.2-9) παίρνουμε για την ενέργεια παραμόρφωσης U ελαστικών γραμμικών φορέων την έκφραση:
( ) ( ) ∫ ••••• == dxκM21wF21U (3.6.2-13)
Η σχέση αυτή εύκολα γενικεύεται έτσι ώστε να περιλαμβάνει αφενός το έργο των εξωτερικών ροπών ΜL και αφετέρου το εσωτερικό έργο των αξονικών και τεμνουσών δυνάμεων:
( ) [ ] ( ) [ ]∫∫∫ •••••••••• ++=+ dxγQdxεΝdxκM21φMwF21 L (3.6.2-14)
3-202
Σ T
A Τ
Ι Κ Η
Ι

ΣΤΑΤΙΚΗ ΤΩΝ ΚΑΤΑΣΚΕΥΩΝ - Τόμος Ι - Θεμελιώδεις αρχές και ισοστατικοί φορείς
Η μορφή αυτή της γενικής εργικής πρότασης της Στατικής για επίπεδα γραμμικά στοιχεία χαρακτηρίζεται συχνά και ως πρόταση του Clapeyron1, η οποία διατυπώνεται 'παραδοσιακά' ως εξής:
"Τα έργα των εξωτερικών και εσωτερικών δυνάμεων είναι ίσα και η τιμή τους ισούται με το μισό του έργου που θα εκτελούσαν αυτές, αν διατηρούσαν την τελική τους τιμή από την αρχή έως το τέλος της παραμόρφωσης".
Στη γραμμική περίπτωση είδαμε ότι ισχύει η ισότητα μεταξύ έργων και συμπληρωματικών έργων: W*e= We και W*i = Wi. Επομένως, για το συνολικά παραγόμενο συμπληρωματικό έργο ισχύει στη γραμμική περίπτωση η ανάλογη της (3.6.2-12) σχέση για τα συμπληρωματικά έργα:
0WWW ei =+= ∗∗∗ (3.6.2-15)
Μια αναλυτικότερη παρουσίαση των παραπάνω εννοιών και σχέσεων θα δοθεί στο κεφάλαιο 8.
Στην επόμενη παράγραφο 3.6.3 θα αναπτυχθούν οι έννοιες των δυνατών έργων και των συμπληρωματικών δυνατών έργων προκειμένου να διατυπωθούν στη συνέχεια οι δύο αντίστοιχες προτάσεις (ΑΔΕ και ΑΣΔΕ), που έχουν σημαντική εφαρμογή στη Στατική των Κατασκευών.
3.6.3 Δυνατά έργα και συμπληρωματικά δυνατά έργα Το ίδιο εξωτερικό έργο παραμόρφωσης We που παράγεται από τα εξωτερικά φορτία επί των προκαλούμενων από αυτά μετακινήσεων του φορέα και το ίδιο εσωτερικό έργο παραμόρφωσης Wi που παράγεται από τα εσωτερικά εντασιακά μεγέθη (φορτία διατομής) επί των προκαλούμενων από αυτά παραμορφώσεων των διατομών έχουν σχετικά περιορισμένη σημασία στη Στατική των Κατασκευών. Αντίθετα, πολύ σημαντικότερες και χρησιμότερες για τους υπολογισμούς είναι οι εργικές σχέσεις που υφίστανται αφενός μεταξύ εξωτερικών φορτίων και μετακινήσεων και αφετέρου μεταξύ φορτίων διατομής και παραμορφώσεων που δεν συνδέονται μεταξύ τους με σχέσεις αιτιότητας. Ως προετοιμασία για τη διατύπωση των εργικών αυτών σχέσεων εισάγονται ακολούθως οι έννοιες των νοητών (δυνατών) φορτίων και των νοητών (δυνατών) μετακινήσεων σε αντιδιαστολή προς τα πραγματικά φορτία και τις πραγματικές μετακινήσεις, καθώς και οι συνακόλουθες έννοιες των δυνατών έργων και των συμπληρωματικών δυνατών έργων.
1 BENOIT PIERRE ÈMILE CLAPEYRON (1799-1864), Γάλλος μηχανικός και γεφυροποιός με αξιόλογες συνεισφορές στη Μηχανική. Η παλαιότερα συχνά χρησιμοποιούμενη "μέθοδος των τριών ροπών" για τον υπολογισμό υπερστατικών συνεχών δοκών φέρει το όνομά του.
3-203
Σ T
A Τ
Ι Κ Η
Ι

Κεφάλαιο 3. Θεμελιώδεις αρχές της Στατικής των γραμμικών φορέων
• Δυνατή (νοητή) μετακίνηση - Δυνατό (νοητό) φορτίο Καταρχάς, τοποθετούμενοι σε ένα υψηλότερο επίπεδο αφαίρεσης, μπορούμε (α) να θεωρήσουμε νοητά εξωτερικά φορτία που προκαλούν στον φορέα
νοητά εντασιακά μεγέθη, καθώς επίσης (β) να επιβάλλουμε στον φορέα νοητές μετακινήσεις που προκαλούν σ’ αυτόν
νοητές παραμορφώσεις. Μπορούμε στη συνέχεια να θεωρήσουμε ότι τα πραγματικά φορτία του φορέα εκτελούν έργο επί των νοητών μετακινήσεων του (οι οποίες δεν βρίσκονται σε σχέσεις αιτιότητας με αυτά) ή, αντιστρόφως, ότι τα νοητά φορτία εκτελούν έργο επί των πραγματικών μετακινήσεων (οι οποίες και σ’ αυτή την περίπτωση δεν βρίσκονται σε σχέσεις αιτιότητας με αυτά). Και στις δύο περιπτώσεις παράγεται προφανώς παθητικό εξωτερικό έργο Wep, όπως αυτό ορίστηκε στις παραγράφους 3.3.2 και 3.6.2. Παρομοίως, μπορούμε να θεωρήσουμε (α') ότι τα πραγματικά εσωτερικά εντασιακά μεγέθη του φορέα εκτελούν έργο επί
των νοητών παραμορφώσεών του (που προκαλούνται από επιβεβλημένες νοητές μετακινήσεις) ή και αντιστρόφως
(β') ότι νοητά εσωτερικά εντασιακά μεγέθη (που προκαλούνται από νοητά εξωτερικά φορτία) εκτελούν έργο επί των πραγματικών παραμορφώσεών του.
Και στις δύο περιπτώσεις παράγεται προφανώς παθητικό εσωτερικό έργο Wip, όπως αυτό ορίστηκε στις παραγράφους 3.3.2 και 3.6.2. Τα παραπάνω νοητά μεγέθη (νοητές μετακινήσεις και παραμορφώσεις, νοητά εξωτερικά και εσωτερικά εντασιακά μεγέθη) χαρακτηρίζονται στη Στατική ως "δυνατά" και τα αντίστοιχα έργα ως "δυνατά έργα" ή " συμπληρωματικά δυνατά έργα". Όλα τα δυνατά μεγέθη φέρουν - προς διαφοροποίησή τους από τα πραγματικά - τον άνω δείκτη "ν" (νοητά, virtual). Έτσι, π.χ., η δυνατή μετατόπιση κατά z του σημείου a ενός φορέα γράφεται ως wa
v, η δυνατή στροφή του ως φav, η
ροπή στο σημείο a λόγω ενός νοητού φορτίου ως Μav, το εξωτερικό δυνατό έργο
ως Wev κτλ.
Σημείωση 1: Κατά ευτυχή σύμπτωση, ο δείκτης "ν" συμπίπτει οπτικά όχι μόνο με το αρχικό γράμμα της λέξης "νοητός", αλλά και με το πρώτο γράμμα της λέξης "virtual", που είναι ο αντίστοιχος αγγλοσαξονικός όρος. Σημειώνεται επίσης ότι πολύ συχνά στη βιβλιογραφία τα δυνατά μεγέθη χαρακτηρίζονται με την πρόταξη ενός "δ": Αντί uv γράφουμε δu, αντί για We
v γράφουμε δWe κτλ. Το "δ" τυχαίνει να είναι το αρχικό γράμμα της λέξης "δυνατός", αλλά ο ουσιαστικός λόγος που χρησιμοποιείται είναι άλλος: Αποτελεί το μαθηματικό σύμβολο της πρώτης μεταβολής ενός μεγέθους και η δυνατή μετακίνηση μπορεί να θεωρηθεί από μαθηματικής πλευράς ως η πρώτη μεταβολή δu της πραγματικής μετακίνησης u. Το ίδιο ισχύει κατ’ αναλογία και για τα δυνατά μεγέθη έντασης (εξωτερικά και εσωτερικά). Σημειώνεται επίσης ότι το άθροισμα ū=u+δu ονομάζεται παραλλαγή του αρχικού μεγέθους u και ότι τα θεωρήματα που ισχύουν για τις μεταβολές δW του έργου παραμόρφωσης W χαρακτηρίζονται ως ενεργειακές ή παραλλακτικές αρχές. Η παρουσίαση των αρχών αυτών θα γίνει στο κεφάλαιο 8.
3-204
Σ T
A Τ
Ι Κ Η
Ι

ΣΤΑΤΙΚΗ ΤΩΝ ΚΑΤΑΣΚΕΥΩΝ - Τόμος Ι - Θεμελιώδεις αρχές και ισοστατικοί φορείς
Τονίζεται ότι οι δυνατές μετακινήσεις (και οι προκαλούμενες από αυτές δυνατές παραμορφώσεις) και τα δυνατά φορτία (και τα προκαλούμενα από αυτά δυνατά φορτία διατομής) δεν χρειάζεται καταρχήν να υπόκεινται σε κανέναν περιορισμό. Εντούτοις, για λόγους σκοπιμότητας, που θα γίνουν κατανοητοί αργότερα, εισάγονται οι εξής περιοριστικές παραδοχές:
Οι δυνατές μετακινήσεις πρέπει να είναι απειροστές σε μέγεθος, έτσι ώστε να υπακούουν στους γεωμετρικούς κανόνες που ισχύουν για απειροστά μεγέθη (βλ. παράγρ. 3.2.4-Α3) , και
να ικανοποιούν τις συνθήκες συμβιβαστού, δηλαδή να είναι συμβιβαστές τόσο με τους εξωτερικούς και εσωτερικούς συνδέσμους του φορέα όσο και με τις λόγω των δυνατών μετακινήσεων προκαλούμενες δυνατές παραμορφώσεις σε κάθε σημείο του φορέα.
Σημείωση 2: Οι προϋποθέσεις αυτές συντρέχουν εφόσον η κατάσταση δυνατής μετακίνησης/παραμόρφωσης οριστεί ως η πρώτη παραλλαγή της πραγματικής κατάστασης μετακίνησης/παραμόρφωσης (βλ. Σημείωση 1).
Τα δυνατά φορτία δεν υπόκεινται σε περιορισμό μεγέθους, αλλά πρέπει να πληρούν τις συνθήκες ισορροπίας, δηλαδή να βρίσκονται σε ισορροπία με τις προκαλούμενες από αυτά αντιδράσεις στήριξης, καθώς και με τις εσωτερικές δυνατές εντάσεις (δυνατά φορτία διατομής).
Σημείωση 3: Οι προϋποθέσεις αυτές συντρέχουν εφόσον η κατάσταση δυνατής φόρτισης/έντασης οριστεί ως η πρώτη παραλλαγή της πραγματικής κατάστασης φόρτισης/έντασης (βλ. Σημείωση 1).
Γενικώς, εφόσον οι μετακινήσεις/παραμορφώσεις μιας δεδομένης κατάστασης παραμόρφωσης ικανοποιούν τις παραπάνω δύο προϋποθέσεις, η κατάσταση αυτή του φορέα χαρακτηρίζεται ως γεωμετρικά επιτρεπτή κατάσταση μετακίνησης ή παραμόρφωσης.
Αντίστοιχα, εφόσον τα εξωτερικά και εσωτερικά εντασιακά μεγέθη (φορτία/αντιδράσεις και φορτία διατομής) μιας δεδομένης κατάστασης έντασης ικανοποιούν τις συνθήκες ισορροπίας, η κατάσταση αυτή του φορέα χαρακτηρίζεται ως στατικά επιτρεπτή κατάσταση έντασης.
Σύμφωνα με τους προηγηθέντες ορισμούς, είναι προφανές ότι η πραγματική κατάσταση έντασης και παραμόρφωσης, στην οποία περιέρχεται ένας φορτιζόμενος φορέας, είναι τόσο γεωμετρικά όσο και στατικά επιτρεπτή. Συνεπώς, οποιαδήποτε πραγματική μετακίνηση ή, γενικότερα, οποιαδήποτε πραγματική κατάσταση παραμόρφωσης μπορεί να θεωρηθεί μέσα στα πλαίσια της Γραμμικής
3-205
Σ T
A Τ
Ι Κ Η
Ι

Κεφάλαιο 3. Θεμελιώδεις αρχές της Στατικής των γραμμικών φορέων
Ελαστοστατικής ως δυνατή. Αντίστοιχα, οποιοδήποτε πραγματικό φορτίο ή, γενικότερα, οποιαδήποτε πραγματική κατάσταση έντασης μπορεί να θεωρηθεί ως δυνατή. Τα παραπάνω ισχύουν διότι στη Γραμμική Ελαστοστατική αφενός περιοριζόμαστε σε απειροστές μετακινήσεις και αφετέρου απαιτούμε από τις αναπτυσσόμενες στον φορέα παραμορφώσεις και εντάσεις να ικανοποιούν τόσο τις συνθήκες συμβιβαστού, όσο και τις συνθήκες ισορροπίας.
• Δυνατό έργο και συμπληρωματικό δυνατό έργο Ας επανέλθουμε τώρα στην καμπτόμενη αμφιέρειστη δοκό του παραδείγματός μας (Σχ. 3.6.1-1). Υπό την επίδραση του πραγματικού φορτίου F η δοκός υφίσταται σε κάθε σημείο της x την πραγματική μετατόπιση w(x) μεταπίπτοντας έτσι από την αρχική (απαραμόρφωτη και άτονη) κατάσταση Ι στην κατάσταση ΙΙ (βλ. Σχ. 3.6.3-1), η οποία είναι μια κατάσταση ισορροπίας και συμβιβαστής παραμόρφωσης.
Έστω λοιπόν τώρα ότι στην παραμορφωμένη και ισορροπούσα δοκό επιβάλλεται μία δυνατή κατάσταση παραμόρφωσης wv(x) (βλ. Σχ. 3.6.3-1(α1), Κατάσταση ΙΙΙ-1).
Το φορτίο F, μη ευρισκόμενο σε σχέση αιτιότητας προς τη δυνατή μετατόπιση wv του σημείου εφαρμογής του, παράγει παθητικό εξωτερικό έργο που σύμφωνα με την (3.6.2-2) είναι ίσο με:
( )δwFδW ήwFW evv
e •• == (3.6.3-1)
Το έργο αυτό το ονομάζουμε εξωτερικό δυνατό έργο και το χαρακτηρίζουμε με τον άνω δείκτη ν (αντί του κάτω δείκτη p που χρησιμοποιήθηκε έως τώρα για το παθητικό έργο). Παρατηρούμε ότι, όπως σε κάθε παθητικό έργο, δεν υφίσταται ο συντελεστής ½ που υπάρχει στις αντίστοιχες εκφράσεις του ίδιου έργου παραμόρφωσης. Στο σχήμα 3.6.3-1(β) φαίνεται το σχετικό διάγραμμα φορτίου-μετατόπισης. Ας επιστρέψουμε τώρα στην παραμορφωμένη και ισορροπούσα δοκό (κατάσταση ΙΙ) και ας επιβάλλουμε σ’ αυτήν (δηλ. ας τη φορτίσουμε με) ένα νοητό φορτίο Fv (Σχ. 3.6.3-1(α2), Κατάσταση ΙΙΙ-2) στο ίδιο σημείο όπου δρα το αρχικό (πραγματικό) φορτίο F. Το νοητό φορτίο Fv, μη ευρισκόμενο σε σχέση αιτιότητας προς την πραγματική μετατόπιση w του σημείου εφαρμογής του, παράγει παθητικό εξωτερικό έργο που σύμφωνα με την (3.6.2-2) είναι ίσο με
( )wδFδWήwFW evv
e •∗
•∗ == (3.6.3-2)
Το έργο αυτό το ονομάζουμε συμπληρωματικό εξωτερικό δυνατό έργο και το χαρακτηρίζουμε με τον άνω δείκτη ν (αντί του κάτω δείκτη p που χρησιμοποιήθηκε έως τώρα για το παθητικό έργο) και με τον επιπλέον άνω δείκτη *, σύμφωνα με τον ορισμό του συμπληρωματικού έργου που δόθηκε στην προηγούμενη παράγραφο 3.6.2. Και εδώ παρατηρούμε ότι δεν υφίσταται ο συντελεστής ½ που υπάρχει στις αντίστοιχες εκφράσεις του ίδιου έργου παραμόρφωσης. Στο σχήμα 3.6.3-1(β) φαίνεται το σχετικό διάγραμμα "φορτίου - μετατόπισης".
3-206
Σ T
A Τ
Ι Κ Η
Ι

ΣΤΑΤΙΚΗ ΤΩΝ ΚΑΤΑΣΚΕΥΩΝ - Τόμος Ι - Θεμελιώδεις αρχές και ισοστατικοί φορείς
1 2w
w(x)
x
1 2 ΕΙ =πεπερ.GA Sض
EAضXZ
Κατάσταση Ι(αφόρτιστη,απαραμόρφωτη)
Κατάσταση ΙΙ(φορτισμένη,παραμορφωμένη)
Ισορροπούσακατάστασησυμβιβαστώνπαραμορφώσεων
1 2w
F
w(x)
F
Κατάσταση ΙΙI-1δυνατής παραμόρφωσης
(α1)
(x)wvwv
1 2w
w(x)
F
Κατάσταση ΙΙI-2δυνατής έντασης
(α2)
Fv
Mv
(x)Mv(x)κv =- [ (x)wv ]''
(β)
μετακίνησηw=w(F)
F
Φορτίο(Εξωτερική ένταση)
wv
wv+w
We
eW *
vF+FFv
ΜvF
w
(γ)
v+Μ
κv+κ παραμόρφωση
M=M(F)
Wi
iW *
κ=κ(w)v
Φορτίο διατομής(Εσωτερική ένταση)
)(κv
)(MvMv=
wFW vve •∗ =
•=v veW F w
( )∫ ••∗ −=
L
0
vvi dxκMW
( )• •= −∫Lv v
i 0W M κ dx
Σχ. 3.6.3-1 Δυνατές καταστάσεις (α1) παραμόρφωσης και (α2) έντασης, (β) εξωτερικά δυνατά και συμπληρωματικά δυνατά έργα (We
v, We*v),
(γ) εσωτερικά δυνατά και συμπληρωματικά δυνατά έργα (Wiv, Wi
*v) [για υλικό Hooke, δηλαδή γραμμική υλική συμπεριφορά]
3-207
Σ T
A Τ
Ι Κ Η
Ι

Κεφάλαιο 3. Θεμελιώδεις αρχές της Στατικής των γραμμικών φορέων
Παρατήρηση: Ο χαρακτηρισμός "συμπληρωματικό" χρησιμεύει και για τον εννοιολογικό διαχωρισμό του εξωτερικού έργου We*v, το οποίο παράγουν νοητά φορτία Fv επί πραγματικών μετακινήσεων w, από το εξωτερικό έργο We
v το οποίο παράγουν πραγματικά φορτία F επί δυνατών μετακινήσεων wv:
( ) ( )w,FW W, wF,WW vve
vve == ∗
Κατ’ αντιστοιχία προς τα παραπάνω, τα εσωτερικά δυνατά έργα Wiv και
συμπληρωματικά εσωτερικά δυνατά έργα Wi*v ισούνται βάσει της εξίσωσης (3.6.2-7) για το παθητικό εσωτερικό έργο με
( ) ( )∫ ••−=L
0
vvvi dxwκFΜW (3.6.3-3)
και
( ) ( )∫ ••∗ −=
L
0
vvvi dxMκFΜW (3.6.3-4)
Στις εκφράσεις αυτές δίνεται εντός παρενθέσεων το αίτιο στο οποίο οφείλεται το εκάστοτε μέγεθος. Στη σχέση (3.6.3-3) του εσωτερικού δυνατού έργου Wi
v, έργο παράγουν οι πραγματικές ροπές Μ=Μ(F), οι οποίες αναπτύσσονται στην πραγματική κατάσταση έντασης λόγω του πραγματικού φορτίου F, επί των δυνατών καμπυλοτήτων κv=κν(wν) που εμφανίζονται στη θεωρούμενη δυνατή κατάσταση μετακίνησης wν(x). Παρομοίως, στη σχέση (3.6.3-4) του συμπληρωματικού εσωτερικού δυνατού έργου Wi*v, έργο παράγουν οι δυνατές ροπές Μv=Μv(Fv), οι οποίες αναπτύσσονται στη θεωρούμενη δυνατή κατάσταση έντασης λόγω του δυνατού φορτίου Fv, επί των πραγματικών καμπυλοτήτων κ=κ(Μ) που εμφανίζονται στη θεωρούμενη πραγματική κατάσταση μετακίνησης w(x) και αντιστοιχούν στις πραγματικές ροπές Μ(x). Παρατηρούμε και πάλι ότι λόγω ανυπαρξίας σχέσης αιτιότητας μεταξύ ροπών και καμπυλοτήτων δεν υφίσταται ο συντελεστής ½ που υπάρχει στις αντίστοιχες εκφράσεις του ίδιου έργου παραμόρφωσης.
Σημειώνεται επίσης ότι όπως τα πραγματικά εσωτερικά έργα είναι αρνητικά, επειδή τα πραγματικά εσωτερικά εντασιακά μεγέθη είναι αντίθετα προς την αναπτυσσόμενη πραγματική παραμόρφωση, έτσι και τα δυνατά εσωτερικά έργα έχουν αρνητικό πρόσημο, επειδή τα συμμετέχοντα στην παραγωγή τους (πραγματικά / δυνατά) μεγέθη έντασης και παραμόρφωσης έχουν αντίθετες φορές.
Στο σχήμα 3.6.3-1(γ) φαίνεται το σχετικό διάγραμμα "εσωτερικής έντασης - παραμόρφωσης" ("ροπών-καμπυλοτήτων").
3-208
Σ T
A Τ
Ι Κ Η
Ι

ΣΤΑΤΙΚΗ ΤΩΝ ΚΑΤΑΣΚΕΥΩΝ - Τόμος Ι - Θεμελιώδεις αρχές και ισοστατικοί φορείς
Με τη βοήθεια των εννοιών που εισήχθησαν στην παράγραφο αυτή θα δώσουμε στις επόμενες παραγράφους απάντηση στο ερώτημα:
"Πότε η δοκός του παραδείγματός μας (Σχ. 3.6.1-1) βρίσκεται σε κατάσταση ισορροπίας και συμβιβαστής παραμόρφωσης;"
καθώς και στο ερώτημα:
"Πώς υπολογίζονται τα εντασιακά και παραμορφωσιακά μεγέθη της δοκού (π.χ. η ροπή Μ και η βύθιση w στο σημείο εφαρμογής του φορτίου F) που εμφανίζονται στην κατάσταση αυτή;"
Προς τούτο θα χρησιμοποιήσουμε το σχήμα 3.6.3-1 και θα θεωρήσουμε τις εξής τρεις καταστάσεις που απεικονίζονται σ’ αυτό:
(1) την αρχική απαραμόρφωτη κατάσταση πριν την προσαγωγή του φορτίου F (Κατάσταση Ι),
(2) την παραμορφωμένη ισορροπούσα και συμβιβαστή κατάσταση μετά την προσαγωγή του φορτίου F (Κατάσταση ΙΙ),
και
(3) την κατάσταση ΙΙΙ, η οποία προκύπτει από την κατάσταση ΙΙ με επιβολή μιας "ενόχλησης". Η "ενόχληση" αυτή συνίσταται είτε στην επιβολή μιας δυνατής μετακίνησης wv είτε με την επιβολή ενός δυνατού φορτίου Fv.
3-209
Σ T
A Τ
Ι Κ Η
Ι

Κεφάλαιο 3. Θεμελιώδεις αρχές της Στατικής των γραμμικών φορέων
3.6.4 Η αρχή των δυνατών έργων (ΑΔΕ) ή δυνατών μετακινήσεων
Α. Διατύπωση της ΑΔΕ Θεωρούμε τις τρεις καταστάσεις Ι, ΙΙ και ΙΙΙ-1 του σχήματος 3.6.3-1 και τις απεικονίζουμε ξανά στο σχήμα 3.6.4-1. Στην κατάσταση Ι το παραχθέν έργο είναι μηδενικό, αφού πρόκειται για την αφόρτιστη δοκό όπου εντάσεις και παραμορφώσεις είναι ανύπαρκτες. Η κατάσταση Ι χρησιμεύει ως κατάσταση αναφοράς.
ww(x)
x
1 2 Κατάσταση αναφοράςW
XZ
Κατάσταση Ι(αφόρτιστη,απαραμόρφωτη)
Κατάσταση ΙΙ(ισορροπούσακατάσταση Fσυμβιβαστώνπαραμορφώσεων)
I=0
Παραχθέν έργο:WIΙ =WIΙ
e (F,w)+ WIΙi (Μ,κ)
w
w(x)
F
(x)wvwv
(x)κv =- [ (x)wv ]''
Κατάσταση ΙΙΙ Παραχθέν έργο:WIΙΙ=WIΙI
e (F,w+w + WIΙIi (Μ,κ+κv) v)
=WIΙ + W ve (F,wv) + (Μ,κv)W v
i
=WIΙ + W v
(δυνατήκατάστασημετακίνησης -παραμορφώσης) Σχ. 3.6.4-1 Αρχική (απαραμόρφωτη) κατάσταση Ι, πραγματική παραμορφωμένη κατάσταση
ΙΙ, δυνατή κατάσταση παραμόρφωσης ΙΙΙ
Η κατάσταση ΙΙ είναι η (πραγματική) κατάσταση παραμόρφωσης, στην οποία περιέρχεται ο φορέας μας μετά τη φόρτισή του με το φορτίο F. Στην παραμορφωμένη αυτή κατάσταση ικανοποιούνται τόσο οι συνθήκες ισορροπίας, όσο και οι συνθήκες συμβιβαστού. Πρόκειται δηλαδή για μία συμβιβαστή κατάσταση ισορροπίας. Το παραχθέν έργο κατά τη μετάβαση της δοκού από την κατάσταση Ι στην κατάσταση ΙΙ είναι ίσο με το άθροισμα του εξωτερικού έργου We
II(F,w) και του εσωτερικού έργου WiII(Μ,κ):
( ) ( )κM,WwF,WW IIi
IIe
II += (3.6.4-1)
όπου M, w και κ οι πραγματικές ροπές, βυθίσεις και καμπυλότητες λόγω του φορτίου F αντιστοίχως.
Προκειμένου τώρα να διαπιστώσουμε αν μία δεδομένη κατάσταση ΙΙ ικανοποιεί πράγματι τις συνθήκες ισορροπίας, την υποβάλλουμε σε μία "μικρή ενόχληση" υπό τη μορφή μιας δυνατής μετακίνησης wv σε τυχόν σημείο, π.χ. στο σημείο εφαρμογής του φορτίου F. Η δοκός μεταπίπτει έτσι στη νοητή κατάσταση παραμόρφωσης ΙΙΙ, ενώ η επικρατούσα στην κατάσταση ΙΙ ένταση διατηρείται
3-210
Σ T
A Τ
Ι Κ Η
Ι

ΣΤΑΤΙΚΗ ΤΩΝ ΚΑΤΑΣΚΕΥΩΝ - Τόμος Ι - Θεμελιώδεις αρχές και ισοστατικοί φορείς
αμετάβλητη, αφού οι δυνατές μετακινήσεις εξ ορισμού δεν έχουν σχέση αιτιότητας προς τις εντάσεις. Το συνολικό έργο που παράγεται κατά τη μετάβαση της δοκού από την αρχική κατάσταση Ι στην κατάσταση ΙΙΙ είναι:
( ) ( )( ) ( )
vII
vvi
vve
II
vIIIi
vIIIe
III
WW
κM,WwF,WW
κκM,WwwF,WW
+=
++=
+++=
(3.6.4-2)
όπου Wv το συνολικό δυνατό έργο που παράγεται από την πραγματική εντασιακή κατάσταση ΙΙ F,M, δηλαδή από τα πραγματικά εξωτερικά και εσωτερικά εντασιακά μεγέθη, επί της δυνατής παραμορφωσιακής κατάστασης wv, κv, δηλαδή επί των δυνατών μετακινήσεων και παραμορφώσεων (Υπενθύμιση: Λόγω των παραδοχών της ατμησίας και της ατένειας εμφανίζονται εδώ μόνο καμπυλότητες κ).
Εφαρμόζοντας τώρα μία διαισθητικά εύκολα κατανοητή γενική αρχή της Μηχανικής, μπορούμε να πούμε ότι η κατάσταση ΙΙ είναι μία ισορροπούσα κατάσταση, αν η "μικρή ενόχληση" στην οποία την υποβάλαμε δεν είναι σε θέση να τη μεταβάλλει ή, σε διαφορετική διατύπωση, αν ο φορέας μετά την ενόχληση που δέχθηκε τείνει αφ’ εαυτού να επανέλθει στην προηγούμενη θέση του. Αυτό συμβαίνει όταν το κατά την ενόχληση παραγόμενο έργο είναι μηδενικό, δηλαδή όταν η διαφορά
vIIIII WWWΔW =−=
των παραγόμενων έργων μεταξύ της κατάστασης ΙΙ και ΙΙΙ είναι ίση με το μηδέν:
( ) ( ) 0κM,WwF,WW vvi
vve
v =+= (3.6.4-3)
ή, με άλλα λόγια, όταν οι εντάσεις που επικρατούν στην κατάσταση ΙΙ δεν έχουν καμία τάση να παράξουν έργο και να μεταβάλλουν την κατάσταση αυτή της δοκού. Η εξίσωση (3.6.4-3) ονομάζεται αρχή των δυνατών έργων (ΑΔΕ) ή αρχή των δυνατών (ή νοητών) μετακινήσεων (ή παραμορφώσεων) και μπορεί να διατυπωθεί λεκτικά ως εξής:
Το δυνατό έργο που παράγεται από ένα σύνολο πραγματικών (και άρα ισορροπούντων) εντασιακών μεγεθών (δηλ. των εξωτερικών φορτίων και των εσωτερικών δυνάμεων και ροπών της πραγματικής κατάστασης έντασης) κατά μία δυνατή (και άρα εξ ορισμού συμβιβαστή) μετακίνηση του φορέα επάνω στον οποίο ενεργούν είναι μηδενικό. Και αντίστροφα: Αν το έργο που παράγεται από ένα σύνολο εντασιακών μεγεθών (εξωτερικών φορτίων και εσωτερικών δυνάμεων και ροπών) κατά οποιαδήποτε δυνατή (και άρα εξ ορισμού συμβιβαστή) μετακίνηση του φορέα επάνω στον οποίο ενεργούν είναι μηδενικό, τότε τα εντασιακά αυτά μεγέθη βρίσκονται σε ισορροπία.
3-211
Σ T
A Τ
Ι Κ Η
Ι

Κεφάλαιο 3. Θεμελιώδεις αρχές της Στατικής των γραμμικών φορέων
Παραλείποντας χάριν απλούστευσης τις παρενθέσεις στην εξίσωση (3.6.4-3), η ΑΔΕ γράφεται συνήθως συμβολικά ως εξής:
vi
ve
vi
ve
v W Wή 0WWW −==+=
ieie δWδWή0 δWδW δW ή −==+=
(3.6.4-4)
όπου Wev ή δWe το σύνολο των εξωτερικών δυνατών έργων
Wiv ή δWi το σύνολο των εσωτερικών δυνατών έργων
Wv ή δW το σύνολο όλων των δυνατών έργων
Ιστορική σημείωση: Η ισχύς της ΑΔΕ υπερβαίνει τα όρια της Στατικής και αφορά σε ολόκληρη τη Μηχανική. Η ΑΔΕ διατυπώθηκε ως ιδέα για πρώτη φορά το 1717 από τον J. BERNOULLI1 σε μία επιστολή του προς τον P. VARIGNON2. Τα μαθηματικά εργαλεία που απαιτούνται για την εφαρμογή της αναπτύχθηκαν εν πολλοίς από τον J. L. LAGRANGE (1736-1813), ο οποίος χρησιμοποίησε την ΑΔΕ - μαζί με την αρχή της αποδέσμευσης (βλ. παράγρ. 3.2.5-Γ) - ως θεμελιώδη αρχή της Μηχανικής στο σημαντικότατο έργο του Méchanique Analytique (1788).
Β. Εποπτική ερμηνεία και απόδειξη της ΑΔΕ Η παραπάνω χρησιμοποιηθείσα γενική "μέθοδος της ενόχλησης" ενός συστήματος (φορέα) μπορεί να διευκρινιστεί περαιτέρω εποπτικά με τη βοήθεια ενός ζυγού με απολύτως στερεούς βραχίονες (Σχ. 3.6.4-2).
κF2
(α) Κατάσταση πριν την "ενόχληση"
L1 L2
F1
κF2
(β) Κατάσταση μετά την "ενόχληση"
L1 φvφv∏
L2 φv∏
L1 L2
F1
Σχ. 3.6.4-2 Δυνατή μετακίνηση ενός ζυγού
Ο ζυγός βρίσκεται σε κατάσταση ισορροπίας, αν στην κατάσταση πριν την ενόχληση (Σχ. 3.6.4-2(α)) ικανοποιείται η συνθήκη ισορροπίας των ροπών ως προς το κέντρο Κ:
2211 LFLF •• = (3.6.4-5)
1 JOHANN BERNOULLI (1667-1748), Ελβετός μαθηματικός με σημαντικό έργο στην Υδρομηχανική και τη Βαλλιστική. Θεωρείται μαζί με τον αδελφό του JACOB ως θεμελιωτής του Λογισμού των παραλλαγών. 2 PIERRE VARIGNON (1654-1722), βλ. παράγρ. 3.2.2-Β.
3-212
Σ T
A Τ
Ι Κ Η
Ι

ΣΤΑΤΙΚΗ ΤΩΝ ΚΑΤΑΣΚΕΥΩΝ - Τόμος Ι - Θεμελιώδεις αρχές και ισοστατικοί φορείς
Επιβάλλοντας τώρα μία "ενόχληση", π.χ. με μία μικρή νοητή μετατόπιση του αριστερού άκρου προς τα επάνω, ο ζυγός τείνει να στραφεί κατά τη δυνατή στροφή φν (Σχ. 3.6.4-2(β)), οπότε τα φορτία F1 και F2 παράγουν το εξωτερικό δυνατό έργο:
( ) ( )v22
v11
ve φLFφLFW •••• +−= (3.6.4-6)
Το εσωτερικό δυνατό έργο είναι μηδενικό λόγω του απαραμόρφωτου των απολύτων στερεών βραχιόνων: Wi
v=0. Έτσι, σύμφωνα με την ΑΔΕ (βλ. εξ. (3.6.4-3)) έχουμε
( ) 0φLFLFφLFφLFWWW v2211
v22
v11
vi
ve
v =+−=+−=+= ••••••• (3.6.4-7)
και λόγω φν ≠0 :
2211 LFLF •• = (3.6.4-8)
Διαπιστώνουμε ότι η σχέση αυτή ταυτίζεται με τη συνθήκη ισορροπίας (3.6.4-5), δηλαδή η ισχύς της ΑΔΕ συνεπάγεται την ισχύ των συνθηκών ισορροπίας. Προφανώς ισχύει και το αντίστροφο: Πολλαπλασιάζοντας τη συνθήκη ισορροπίας (3.6.4-5) με την τυχούσα δυνατή μετακίνηση (εδώ: στροφή φν) παίρνουμε την εξίσωση (3.6.4-7), δηλαδή η ισχύς των συνθηκών ισορροπίας συνεπάγεται την ισχύ της ΑΔΕ. Συνεπώς η ΑΔΕ ισοδυναμεί αμφιμονοσήμαντα με τις συνθήκες ισορροπίας. Σημείωση: Παλαιότερα μπορούσε κανείς σε λαϊκές αγορές να παρατηρήσει συχνά τους πωλητές να κτυπούν ελαφρά την παραδοσιακή ζυγαριά τους (βλ. Σχ. 3.6.4-3) για να επαληθεύσουν την ισότητα βάρους μεταξύ των προϊόντων που είχαν τοποθετήσει προς ζύγισμα στο ένα τάσι (δίσκο) και των σταθμών (βαριδίων) που είχαν τοποθετήσει στο άλλο. Το ελαφρό κτύπημα («ενόχληση») μπορεί να θεωρηθεί ως μία δυνατή μετατόπιση, στην οποία υπέβαλε ο πωλητής τη ζυγαριά του. Εάν μετά την ενόχληση τα δύο τάσια επανέρχονταν στο ίδιο ύψος, αν δηλαδή προϊόντα και σταθμά ισορροπούσαν, το ζύγισμα ήταν σωστό. Έλεγχαν έτσι την ισορροπία όχι με τις συνθήκες ισορροπίας, αλλά με την ΑΔΕ.
Σχ. 3.6.4-3 Παραδοσιακή ζυγαριά - Έλεγχος ισορροπίας με ελαφρό κτύπημα του ενός δίσκου
3-213
Σ T
A Τ
Ι Κ Η
Ι

Κεφάλαιο 3. Θεμελιώδεις αρχές της Στατικής των γραμμικών φορέων
Γ. Παράδειγμα υπολογισμού μεγέθους έντασης με την ΑΔΕ Σύμφωνα με όλα τα παραπάνω, η ΑΔΕ αποτελεί μία μαθηματικώς ισότιμη διατύπωση των συνθηκών ισορροπίας. Επομένως, μεγέθη έντασης (αντιδράσεις στήριξης και φορτία διατομής) που μπορούν να υπολογιστούν με τις συνθήκες ισορροπίας, μπορούν να υπολογιστούν και με την ΑΔΕ. Ως παράδειγμα θα παρουσιαστεί ακολούθως η διαδικασία υπολογισμού της ροπής κάμψης σε δεδομένη διατομή της αμφιέρειστης δοκού του σχήματος 3.6.1-1, με την οποία
ι τους συλλογισμούς μας.
ί στο μέσο της δοκού. Τα βήματα που ακολουθεί ο υπολογισμός είναι τα
(1)
να επιβάλλουμε
(2)
διατομής είναι
(3) ό), αλλά ισορροπούντα φορέα σε . 3.6.4-4(γ1)).
είχαμε ξεκινήσε
Παράδειγμα: Έστω λοιπόν ότι θέλουμε να υπολογίσουμε τη ροπή Μα στη θέση x=L/4 της ισοστατικής δοκού του σχήματος 3.6.4-4(α) λόγω του μοναχικού φορτίου F που ενεργεεξής:
Στην ισορροπούσα και συμβιβαστή παραμορφωμένη κατάσταση του δεδομένου φορέα (Σχ. 3.6.4-4(β1)) καταλύουμε τη δεσμική ράβδο που μεταβιβάζει το εντασιακό μέγεθος που θέλουμε να υπολογίσουμε. Εδώ: Εισάγουμε μια καμπτική άρθρωση στο σημείο α (Σχ. 3.6.4-4 (β2)). Με τον τρόπο αυτόν ο αρχικά στερεός (ισοστατικός) φορέας μετατρέπεται σε χαλαρό (μονοκινηματική αλυσίδα), στον οποίο μπορούμεχωρίς εφαρμογή δύναμης μία δυνατή (νοητή) μετακίνηση. Προκειμένου να διατηρηθεί η πριν την κατάλυση της δεσμικής ράβδου, δηλαδή εδώ η πριν την εισαγωγή της καμπτικής άρθρωσης, υφιστάμενη ισορροπιακή κατάσταση, προσάγουμε το προς υπολογισμό (ζητούμενο) εντασιακό μέγεθος στη θέση της καταλυμένης δεσμικής ράβδου ως εξωτερικό φορτίο. Εδώ: Προσάγουμε την Μα στην εισαχθείσα στο σημείο α άρθρωση (Σχ. 3.6.4-4(β2)). Υπενθυμίζεται ότι τα φορτίαζεύγη εντασιακών μεγεθών και όχι μεμονωμένα μεγέθη. Υποβάλλουμε τον χαλαρό (μονοκινηματικμία δυνατή μετακίνηση (ΣχΣημαντική παρατήρηση 1: Δεδομένου ότι τόσο οι πραγματικές μετακινήσεις w(x) όσο και οι δυνατές μετακινήσεις wν(x) είναι απειροστές (οι πραγματικές διότι κινούμαστε μέσα στο πλαίσιο της θεωρίας 1ης τάξης και οι δυνατές εξ ορισμού), η δυνατή μετακίνηση δεν χρειάζεται να επιβληθεί - όπως θεωρητικά θα έπρεπε - με αφετηρία την παραμορφωμένη ισορροπούσα κατάσταση (Σχ. 3.6.4-4(γ1)), αλλά μπορεί να
(4)
παρατήρηση, το αποτέλεσμα είναι προφανώς το ίδιο είτε επιβάλλουμε τη
επιβληθεί με βάση την αρχική απαραμόρφωτη κατάσταση (Σχ. 3.6.4-4(γ2)). Καταγράφουμε σύμφωνα με την εξίσωση (3.6.4-4) όλα τα δυνατά έργα που παράγονται από την ισορροπούσα εντασιακή κατάσταση επί των δυνατών μετακινήσεων και παραμορφώσεων. Σύμφωνα με την προηγούμενη
3-214
Σ T
A Τ
Ι Κ Η
Ι

ΣΤΑΤΙΚΗ ΤΩΝ ΚΑΤΑΣΚΕΥΩΝ - Τόμος Ι - Θεμελιώδεις αρχές και ισοστατικοί φορείς
δυνατή μετακίνηση με αφετηρία την παραμορφωμένη κατάσταση είτε την επιβάλλουμε με βάση την απαραμόρφωτη κατάσταση.
(α)
1 3
XZ
L/2 L/2L/4
αF
Α
F(β1)
α
F(β2)
Μα
F(γ1)
x
Μα
w(x)
Πραγματική(ισορροπούσα καισυμβιβαστή) κατάστασηπαραμόρφωσης
Ισορροπούσα κατάστασηπαραμόρφωσης σεχαλαρό φορέα
Επιβολή δυνατής μετα-κίνησης στον χαλαρόφορέα με αφετηρίατην παραμορφωμένηκατάσταση
wv(x)wvα
wv2=(2/3) ∏wv
α
F
(γ2)
Μα
Επιβολή δυνατής μετα-κίνησης στον χαλαρόφορέα (ίδια με την παραπάνω)αλλά με αφετηρία τηναπαραμόρφωτη κατάσταση
wvα
wv2=(2/3) ∏wv
αφv
1 =wvα
(L/4)
φv3 =
wvα
(3L/4)
Σχ. 3.6.4-4 Εφαρμογή της ΑΔΕ για τον υπολογισμό μιας ροπής κάμψης
3-215
Σ T
A Τ
Ι Κ Η
Ι

Κεφάλαιο 3. Θεμελιώδεις αρχές της Στατικής των γραμμικών φορέων
Για το παράδειγμά μας παίρνουμε:
( ) ( )( )
( ) ( )
( )
( ) ( ) ( ) 0dxwκFMκM,W
wΜL3
16F32
43Lw
4LwΜw
32F
φΜφΜwFwF,W:όπου
κM,WwF,WW
L
0
vvvvi
vαα
vα
vα
αvα
v2α
v1α
vvve
vvi
vve
v
0
=−=
⎟⎟⎠
⎞⎜⎜⎝
⎛−=
⎟⎟⎠
⎞⎜⎜⎝
⎛+−=
−−=
+=
∫ ••
••
•
••
•••
=
•
•
43421
Επομένως, το συνολικά παραγόμενο δυνατό έργο ισούται με
( )vαα
ve
v wΜL3
16F32WW •⎟⎟
⎠
⎞⎜⎜⎝
⎛−== •
••
Σημαντική παρατήρηση 2: Στο σημείο αυτό γίνεται κατανοητή η σκοπιμότητα μετατροπής του αρχικού (εδώ: ισοστατικού) φορέα σε κινηματική αλυσίδα: Όλα τα παραγόμενα δυνατά έργα είναι εξωτερικά δυνατά έργα, αφού στον χαλαρό φορέα δεν αναπτύσσονται κατά τη δυνατή μετακίνηση δυνατές παραμορφώσεις (κν=0, γν=0, εν=0, ζν=0) επί των οποίων τα πραγματικά φορτία διατομής θα μπορούσαν να παράξουν έργο. Συνεπώς Wi
ν=0 και άρα Wν=Weν. Αποφεύγεται έτσι εξαρχής ο υπολογισμός των
εσωτερικών δυνατών έργων Wνi, ο οποίος θα απαιτούσε τον χρονοβόρο υπολο-
γισμό ολοκληρωμάτων του τύπου Wiν = ∫ (Μ·κν + Q·γν + Ν·εν + ΜΤ·ζν) dx.
[Σημ.: Στην περίπτωση της άτμητης και ατενούς επίπεδης δοκού του παραδείγματός μας θα αρκούσε να ληφθεί υπόψη ο πρώτος όρος]. Απαιτείται έτσι ο υπολογισμός των εξωτερικών μόνο έργων, ο οποίος είναι κατά κανόνα ιδιαίτερα απλός, αφού συνίσταται σε άθροισμα απλών γινομένων (χωρίς ολοκληρώσεις).
(5) Τέλος, εξισώνουμε το καταγεγραμμένο συνολικό δυνατό έργο Wν= Weν με το
μηδέν και επιλύουμε την προκύπτουσα εξίσωση ως προς το ζητούμενο εντασιακό μέγεθος. Για το παράδειγμά μας παίρνουμε:
( )
( )( )
8LF
16L3F
32Μ
0ΜL3
16F32
:0 wεφόσον και
0wΜL3
16F32WW
α
α
vα
vαα
ve
v
••••
••
•
••
•
==⇒
=−⇒
≠
=⎟⎟⎠
⎞⎜⎜⎝
⎛−== •
Επαλήθευση-Έλεγχος: α. Προς επαλήθευση του παραπάνω αποτελέσματος θα υπολογίσουμε την Μα χρησιμοποιώντας τις συνθήκες ισορροπίας με τον τρόπο που παρουσιάστηκε στην
3-216
Σ T
A Τ
Ι Κ Η
Ι

ΣΤΑΤΙΚΗ ΤΩΝ ΚΑΤΑΣΚΕΥΩΝ - Τόμος Ι - Θεμελιώδεις αρχές και ισοστατικοί φορείς
παράγραφο 3.2.6-Δ. Προς τούτο υπολογίζουμε πρώτα την κατακόρυφη αντίδραση στη στήριξη 1 από τη συνθήκη ισορροπίας ροπών ως προς το σημείο 3 (βλ. Σχ. 3.6.4-4(α)):
( ) ( ) 2FA02LFLAM 3 =⇒=+−= ••∑
Εν συνεχεία αποχωρίζουμε το τμήμα 1-α της δοκού με μία κυκλική διαχωριστική τομή και καταστρώνουμε για το τμήμα αυτό τη συνθήκη ισορροπίας ροπών ως προς το σημείο α:
( ) 8LF
4LAΜ0Μ
4LAM αααριστ.α,
••• ==⇒=−=∑
Βλέπουμε ότι το αποτέλεσμα συμπίπτει με εκείνο που βρήκαμε με την ΑΔΕ.
β. Προς επαλήθευση μπορεί να χρησιμοποιηθούν και οι διαφορικές εξισώσεις κάμψης (βλ. παράγρ. 3.5.2):
= − =Q' q και M' Q m−
Για την περίπτωσή μας (q=0, m=0) έχουμε: = =Q' 0 και M' Q
Με απλή ολοκλήρωση των δύο διαφορικών αυτών εξισώσεων ισορροπίας παίρνουμε:
( ) ( ) 211 cxcxMκαιcxQ +== •
Οι σταθερές ολοκλήρωσης c1, c2 προσδιορίζονται με τη βοήθεια των συνοριακών συνθηκών ως εξής:
( )( ) ( ) 0ccx2F00xM
2Fc2Fc0xQσυνεπώς και
0Μ και2FAQ:0 xΓια
22
11
=⇒+===
=⇒===
====
•
Για τη ροπή Μ(x) στην περιοχή 0≤x≤(L/2) παίρνουμε:
( )8
LFM4LxM:
4Lxγια συνεπώς καιx
2FxM α
•• ==⎟
⎠⎞
⎜⎝⎛ ===
Διαπιστώνουμε ότι το αποτέλεσμα είναι ίδιο με εκείνο που βρήκαμε με τις συνθήκες ισορροπίας και με την ΑΔΕ.
Επειδή η παραπάνω παρουσιασθείσα μέθοδος υπολογισμού εντασιακών μεγεθών απαιτεί τη μετατροπή του αρχικού φορέα σε κινηματική αλυσίδα, χαρακτηρίζεται συχνά και ως κινηματική μέθοδος. Συχνά αποκαλείται επίσης "μέθοδος των βοηθητικών μοναδιαίων μετακινήσεων" λόγω της χρησιμοποίησης μιας δυνατής (νοητής, "βοηθητικής") παραμορφωσιακής κατάστασης που προκύπτει από την επιβολή στον δεδομένο φορέα μιας μοναδιαίας αδιάστατης μετακίνησης 1ν[-] (που είναι η εργική μετακίνηση του ζητούμενου μεγέθους έντασης).
Στον υπολογισμό εντασιακών μεγεθών ισοστατικών φορέων με τη βοήθεια της ΑΔΕ θα γίνει αναλυτικότερη αναφορά στην παράγραφο 6.4, όπου θα παρουσιαστούν και άλλα αριθμητικά παραδείγματα.
3-217
Σ T
A Τ
Ι Κ Η
Ι

Κεφάλαιο 3. Θεμελιώδεις αρχές της Στατικής των γραμμικών φορέων
3.6.5 Η αρχή των συμπληρωματικών δυνατών έργων (ΑΣΔΕ) ή δυνατών φορτίων
Α. Διατύπωση της ΑΣΔΕ Όπως και για τη διατύπωση της ΑΔΕ στην προηγούμενη παράγραφο 3.6.4, ξεκινάμε κι εδώ από τη θεώρηση των τριών καταστάσεων Ι, ΙΙ και ΙΙΙ του σχήματος 3.6.3-1(α2) που απεικονίζονται ξανά στο σχήμα 3.6.5-1. Στην κατάσταση Ι το παραχθέν έργο είναι μηδενικό, αφού πρόκειται για την αφόρτιστη δοκό όπου εντάσεις και παραμορφώσεις είναι ανύπαρκτες. Η κατάσταση Ι χρησιμεύει ως κατάσταση αναφοράς.
ww(x)
x
1 2 Κατάσταση αναφοράςW
XZ
Κατάσταση Ι(αφόρτιστη,απαραμόρφωτη)
Κατάσταση ΙΙ(ισορροπούσακατάσταση Fσυμβιβαστώνπαραμορφώσεων)
I=0
Παραχθέν έργο:W IΙ =WIΙ
e (F,w)+ WIΙi (Μ,κ)
w
w(x)
FΚατάσταση ΙΙΙ Παραχθέν έργο:
W IΙΙ=WIΙIe (F+F ,w + WIΙI
i (Μ+M ,κv ) v )=WIΙ + W*
e (F ,wv ) + (Μ ,κv )W vi
=WIΙ + W v
Fv
(x)M
(x)Mv
(x)κ
v *
*
(δυνατήκατάστασηέντασης)
Σχ. 3.6.5-1 Αρχική (απαραμόρφωτη) κατάσταση Ι, πραγματική παραμορφωμένη κατάσταση
ΙΙ, δυνατή κατάσταση έντασης ΙΙΙ
Η κατάσταση ΙΙ είναι η πραγματική κατάσταση στην οποία περιέρχεται ο φορέας μας μετά τη φόρτισή του με το φορτίο F. Στην παραμορφωμένη αυτή κατάσταση ικανοποιούνται τόσο οι συνθήκες ισορροπίας, όσο και οι συνθήκες συμβιβαστού. Πρόκειται δηλαδή για μία συμβιβαστή κατάσταση ισορροπίας. Το παραχθέν έργο κατά τη μετάβαση της δοκού από την κατάσταση Ι στην κατάσταση ΙΙ είναι ίσο με το άθροισμα του εξωτερικού έργου We
II(F,w) και του εσωτερικού έργου WiII(Μ,κ):
( ) ( )κM,WwF,WW IIi
IIe
II += (3.6.5-1)
όπου M, w και κ οι πραγματικές ροπές, βυθίσεις και καμπυλότητες λόγω του φορτίου F αντιστοίχως.
Προκειμένου τώρα να διαπιστώσουμε αν μία δεδομένη ισορροπούσα κατάσταση ΙΙ ικανοποιεί πράγματι τις συνθήκες συμβιβαστού, την υποβάλλουμε σε μία "μικρή ενόχληση" υπό τη μορφή ενός νοητού (δυνατού) φορτίου Fv που ενεργεί
3-218
Σ T
A Τ
Ι Κ Η
Ι

ΣΤΑΤΙΚΗ ΤΩΝ ΚΑΤΑΣΚΕΥΩΝ - Τόμος Ι - Θεμελιώδεις αρχές και ισοστατικοί φορείς
σε τυχόν σημείο, π.χ. στο ίδιο σημείο που ενεργεί και το πραγματικό φορτίο F. Στη δοκό αναπτύσσεται έτσι η νοητή κατάσταση έντασης ΙΙΙ, ενώ η επικρατούσα στην κατάσταση ΙΙ παραμόρφωση διατηρείται αμετάβλητη, αφού το νοητό φορτίο εξ ορισμού δεν έχει σχέση αιτιότητας προς τις παραμορφώσεις. Το συνολικό έργο που παράγεται κατά τη μετάβαση της δοκού από την αρχική κατάσταση Ι στην κατάσταση ΙΙΙ είναι:
( ) ( )( ) (
vII
vvi
vve
II
vIIIi
vIIIe
III
WW
κ,MWw,FWW
κ,MMWw,FFWW
∗
∗∗
+=
++=
+++=
)
(3.6.5-2)
όπου W*v το συνολικό συμπληρωματικό δυνατό έργο που παράγεται από τη νοητή εντασιακή κατάσταση Fv,Mv, δηλαδή από τα νοητά εξωτερικά και εσωτερικά εντασιακά μεγέθη, επί της πραγματικής παραμορφωσιακής κατάστασης w, κ, δηλαδή επί των πραγματικών μετακινήσεων και παραμορφώσεων.
Εφαρμόζοντας τώρα όπως και στην παράγραφο 3.6.4 την ίδια - διαισθητικά κατανοητή - γενική αρχή της Μηχανικής, μπορούμε να πούμε ότι η κατάσταση ΙΙ είναι μία συμβιβαστή κατάσταση, αν η "μικρή ενόχληση" στην οποία την υποβάλαμε δεν είναι σε θέση να τη μεταβάλλει. Αυτό συμβαίνει όταν το κατά την ενόχληση παραγόμενο έργο είναι μηδενικό, δηλαδή όταν η διαφορά
vIIIII WWWΔW ∗=−= των παραγόμενων έργων μεταξύ της κατάστασης ΙΙ και ΙΙΙ είναι ίση με το μηδέν:
( ) ( ) 0κ,MWw,FWW vvi
vve
v =+= ∗∗∗ (3.6.5-3)
ή, διαφορετικά διατυπωμένο, όταν η ενέργεια παραμόρφωσης που είναι αποθηκευμένη στην κατάσταση ΙΙ δεν έχει καμία τάση να παράξει έργο και να μεταβάλει την κατάσταση αυτή της δοκού. Η εξίσωση (3.6.5-3) ονομάζεται αρχή των συμπληρωματικών δυνατών έργων (ΑΣΔΕ) ή αρχή των δυνατών (νοητών) φορτίων ή αρχή των δυνατών (νοητών) εντάσεων ή και αρχή των βοηθητικών δυνάμεων και μπορεί να διατυπωθεί λεκτικά ως εξής:
Το δυνατό έργο που παράγεται από ένα σύνολο νοητών (αλλά ισορροπούντων) εντασιακών μεγεθών (δηλ. των εξωτερικών και εσωτερικών δυνάμεων και ροπών μιας δυνατής - και άρα εξ ορισμού ισορροπούσας - κατάστασης έντασης που προκαλείται από κάποια νοητά φορτία) κατά την πραγματική (και άρα συμβιβαστή) μετακίνηση του φορέα επάνω στον οποίο ενεργούν είναι μηδενικό. Και αντίστροφα: Αν το έργο που παράγεται από ένα σύνολο δυνατών (και άρα εξ ορισμού ισορροπούντων) εντασιακών μεγεθών κατά τη μετακίνηση/παραμόρφωση του φορέα επάνω στον οποίο ενεργούν είναι μηδενικό, τότε οι μετακινήσεις και οι παραμορφώσεις του φορέα ικανοποιούν τις συνθήκες συμβιβαστού.
Παραλείποντας χάριν απλούστευσης τις παρενθέσεις στην εξίσωση (3.6.5-3), η ΑΣΔΕ γράφεται συνήθως συμβολικά ως εξής:
3-219
Σ T
A Τ
Ι Κ Η
Ι

Κεφάλαιο 3. Θεμελιώδεις αρχές της Στατικής των γραμμικών φορέων
∗∗∗∗∗∗∗ −=−==+= iev
iv
ev
iv
ev δWδWήWWή0WWW (3.6.5-4)
όπου W*e
ν ή δW*e το σύνολο των εξωτερικών συμπληρωματικών δυνατών έργων, W*i
ν ή δW*I το σύνολο των εσωτερικών συμπληρωματικών δυνατών έργων, W*ν ή δW* το σύνολο όλων των συμπληρωματικών δυνατών έργων.
Ιστορική σημείωση: Η πρώτη διατύπωση της αρχής των δυνατών (νοητών) φορτίων για τον υπολογισμό μετατοπίσεων (που αποτέλεσε τη βάση για τη μετέπειτα γενικότερη διατύπωση της ΑΣΔΕ) δόθηκε το 1874 από τον Otto Christian Mohr1 (1835-1918), καθηγητή της Αντοχής των Υλικών και της Στατικής στο Πανεπιστήμιο της Δρέσδης, ο οποίος «αντέστρεψε» τον ρόλο των πραγματικών και των δυνατών στατικών μεγεθών έντασης και παραμόρφωσης. Στην περαιτέρω ανάπτυξη και εφαρμογή της ΑΣΔΕ συνεισέφερε και ο Heinrich Müller-Breslau2 (1851-1925), καθηγητής της Στατικής των Κατασκευών στο Τεχνικό Πανεπιστήμιο του Βερολίνου. Αξίζει επίσης να σημειωθεί ότι τη δυαδικότητα που υφίσταται μεταξύ της ΑΔΕ και της ΑΣΔΕ (δηλαδή ο αμοιβαία αντίστοιχος ρόλος που παίζουν τα πραγματικά και τα δυνατά στατικά μεγέθη στη διατύπωση των δύο αρχών), καθώς και η σχέση των δύο αυτών αρχών με τις κλασικές μεθόδους υπολογισμού υπερστατικών φορέων, τη Μέθοδο Δυνάμεων και τη Μέθοδο Μετακινήσεων, διατυπώθηκαν για πρώτη φορά με πλήρη και σαφή τρόπο το 1933 από τον August Hertwig (1872-1955), ο οποίος το 1924 διαδέχθηκε τον Müller-Breslau στην έδρα Στατικής των Κατασκευών στο Τεχνικό Πανεπιστήμιο του Βερολίνου.
Σύμφωνα με τα παραπάνω, η ΑΣΔΕ αποτελεί μία μαθηματικώς ισότιμη διατύπωση των συνθηκών συμβιβαστού. Επομένως, μεγέθη παραμόρφωσης που μπορούν να υπολογιστούν με βάση τις συνθήκες συμβιβαστού, μπορούν να υπολογιστούν και με την ΑΣΔΕ. Ως παράδειγμα θα παρουσιαστεί στην παρακάτω υποπαράγραφο Γ η διαδικασία υπολογισμού της βύθισης σε δεδομένο σημείο της αμφιέρειστης δοκού του σχήματος 3.6.1-1 με την οποία ξεκινήσαμε τους συλλογισμούς μας.
Β. Εποπτική ερμηνεία και απόδειξη της ΑΣΔΕ Εποπτική ερμηνεία, ανάλογη με εκείνη που δόθηκε παραπάνω για την ΑΔΕ (βλ. παράγρ. 3.6.4-Β), δεν είναι δυνατόν να δοθεί για την ΑΣΔΕ. Αργότερα (βλ. κεφ. 8) θα δοθεί αναλυτική απόδειξη της ΑΣΔΕ, στη μορφή που αυτή ισχύει για ελαστικούς γραμμικούς φορείς, οπότε θα φανεί και η σχέση της με τις συνθήκες συμβιβαστού.
1 Οι συνεισφορές του Otto Mohr στην ανάπτυξη της Στατικής υπήρξαν σημαντικές. Σ’ αυτόν ανάγονται π.χ. ο περίφημος "κύκλος του Mohr", η "αναλογία του Mohr" για τον υπολογισμό ελαστικών γραμμών (την οποία θα παρουσιάσουμε αργότερα στο κεφ. 9) και η γενίκευση της πρότασης αμοιβαιότητας του Maxwell (δmn=δnm) για κάθε φορέα (η οποία αποτελεί βασικό έρεισμα για τον υπολογισμό υπερστατικών φορεών με τη μέθοδο δυνάμεων, βλ. [Αβρ-ΙΙ]). Ο Otto Mohr δικαίως θεωρείται ως ένας από τους δημιουργούς της Κλασικής Στατικής. 2 Ο Heinrich Müller-Breslau έδωσε καθοριστική ώθηση για την ανάπτυξη ενός γενικευμένου και αποτελεσματικού τρόπου υπολογισμού των κατασκευών με τη δημοσίευση του βιβλίου του "Die neueren Methoden der Festigkeitslehre und Statik der Baukοnstruktionen" (Berlin, 1886). Σ’ αυτό διατυπώνεται η Μέθοδος Δυνάμεων, όπως ουσιαστικά τη χρησιμοποιούμε και σήμερα για τον υπολογισμό υπερστατικών φορέων.
3-220
Σ T
A Τ
Ι Κ Η
Ι

ΣΤΑΤΙΚΗ ΤΩΝ ΚΑΤΑΣΚΕΥΩΝ - Τόμος Ι - Θεμελιώδεις αρχές και ισοστατικοί φορείς
Γ. Παράδειγμα υπολογισμού μεγέθους παραμόρφωσης με την ΑΣΔΕ Έστω λοιπόν ότι θέλουμε να υπολογίσουμε τη βύθιση wα στη θέση x=L/4 της ισοστατικής (άτμητης και ατενούς) δοκού του σχήματος 3.6.5-2(α) λόγω του μοναχικού φορτίου F που ενεργεί στο μέσο της δοκού.
(x)M
(x)M(x)κ = ΕΙ(x)
Πραγματικές ροπέςκαι πραγματικέςκαμπυλότητες λόγω F
(γ)w(x)
wα
(x)Mv
Μvα=
vα
vα
316
∏Fvα ∏L
Fvα
1 3
XZ
L/2 L/2L/4
Fα
F(β) Πραγματική παραμορφωμένη
(ισορροπούσα καισυμβιβαστή) κατάσταση
Επιβολή δυνατούφορτίου F
Δυνατές ροπές λόγω F
(α)
wα
F/2 F/2w(x)
Σχ. 3.6.5-2 Εφαρμογή της ΑΣΔΕ για τον υπολογισμό μιας μετατόπισης Τα βήματα που ακολουθεί ο υπολογισμός είναι τα εξής:
(α) Στο σημείο a όπου θέλουμε να υπολογίσουμε το παραμορφωσιακό μέγεθος (εδώ: τη βύθιση wα) προσάγουμε ένα νοητό (δυνατό, βοηθητικό) φορτίο Fα
v, που ανταποκρίνεται εργικά προς το ζητούμενο μέγεθος (εδώ: μία κατακόρυφη δύναμη) (Σχ. 3.6.5-2 (γ)). [Σημ.: Αν το ζητούμενο μέγεθος μετακίνησης ήταν η στροφή φα, τότε ως νοητό φορτίο θα χρησιμοποιούσαμε μία ροπή Μα
v]. Ο φορέας φορτίζεται τώρα ταυτόχρονα με το πραγματικό φορτίο F και το νοητό φορτίο Fα
v. Συνεπώς, στον φορέα αναπτύσσονται πραγματικές ροπές κάμψης Μ(x) λόγω F και νοητές ροπές κάμψης Mv(x) λόγω Fα
v, τις οποίες υπολογίζουμε κατά τα γνωστά (βλ. Σχ. 3.6.5-2(β,γ)). Λόγω του πραγματικού φορτίου F αναπτύσσονται στον φορέα οι
πραγματικές μετακινήσεις w(x) της κατάστασης ΙΙ, ενώ το δυνατό φορτίο Fαv
δεν δημιουργεί πρόσθετες μετακινήσεις και παραμορφώσεις, αφού δεν βρίσκεται σε σχέση αιτιότητας με αυτές. Στις πραγματικές μετακινήσεις του
3-221
Σ T
A Τ
Ι Κ Η
Ι

Κεφάλαιο 3. Θεμελιώδεις αρχές της Στατικής των γραμμικών φορέων
φορέα αντιστοιχούν οι πραγματικές καμπυλότητες κ(x)=Μ(x)/(ΕΙ), οι οποίες υπολογίζονται εύκολα από τις ήδη γνωστές πραγματικές ροπές Μ(x).
(β) Καταγράφουμε σύμφωνα με την εξίσωση (3.6.5-3) όλα τα συμπληρωματικά δυνατά εξωτερικά και εσωτερικά έργα που παράγονται από τα νοητά εντασιακά μεγέθη επί των πραγματικών μετακινήσεων και παραμορφώσεων. Εξωτερικό έργο παράγεται από το δυνατό φορτίο Fα
v επί της πραγματικής μετατόπισης wα και εσωτερικό έργο από τις δυνατές ροπές κάμψης Mv(x) επί των πραγματικών καμπυλοτήτων κ(x)=Μ(x)/(ΕΙ):
( ) ( ) ( ) ( )∫ ⎟
⎠⎞
⎜⎝⎛−=+= ••
∗∗∗L
0
vα
vα
vvi
vα
ve
v dxEI
xMxMwFκ,MWw,FWW
(γ) Τέλος, εξισώνουμε το καταγεγραμμένο συνολικό συμπληρωματικό δυνατό έργο W*ν με το μηδέν και επιλύουμε την προκύπτουσα εξίσωση ως προς το ζητούμενο παραμορφωσιακό μέγεθος. Για το παράδειγμά μας παίρνουμε:
( ) ( ) ( ) ( ) 0dxEI
xMxM,FwF0dxEI
xMxMwFWL
0
v1
vαα
vα
L
0
vα
vα
v =⎟⎠⎞
⎜⎝⎛−⇒=⎟
⎠⎞
⎜⎝⎛−= ∫∫ •••••
∗
όπου Μ,v1(x) η ροπή λόγω μοναδιαίου δυνατού φορτίου Fav=1.
( ) ( )( ) .∫ ⎟⎟
⎠
⎞⎜⎜⎝
⎛=⇒≠ •
L
0
v1α
vα dx
xEIxMxM,w0FΛόγω
Για σταθερή δυσκαμψία ΕΙ=σταθ. παίρνουμε:
( ) ( )( ) ==⇒ ∫ ••
Lv1α dxxMxM,
EI1w
0FL/4
∏EI1
+
3L/16+
Η ολοκλήρωση του γινομένου των δύο γραμμικών συναρτήσεων Mv(x) και M(x) δεν παρουσιάζει ιδιαίτερη δυσκολία και γίνεται συνήθως με χρησιμοποίηση έτοιμων πινάκων. Με τη βοήθεια του πίνακα 0 του Παραρτήματος παίρνουμε:
• • • • • • • • • • • •
• • • •
⎡ ⎛ ⎞= + + + +⎜ ⎟⎢ ⎝ ⎠⎣
⎛ ⎞⎤⎛ ⎞+ = ⎜ ⎟⎜ ⎟ ⎥⎝ ⎠ ⎦ ⎝ ⎠
α
3
1 1 3L FL L 1 3L FL 3L FL 2L FL 2L FL Lw 2 2EI 3 16 8 4 6 16 8 16 4 16 8 16 4 4
1 2L FL L 11 FL3 16 4 2 768 EI
+
Συνοψίζοντας όλα τα παραπάνω, μπορούμε να πούμε ότι ο υπολογισμός μιας μεμονωμένης μετακίνησης δα στο σημείο α ενός φορέα υπό δεδομένη φόρτιση γίνεται σε τρία βήματα: (1) Υπολογισμός των αντιδράσεων στήριξης και των φορτίων διατομής του
φορέα υπό τη δεδομένη φόρτιση.
3-222
Σ T
A Τ
Ι Κ Η
Ι

ΣΤΑΤΙΚΗ ΤΩΝ ΚΑΤΑΣΚΕΥΩΝ - Τόμος Ι - Θεμελιώδεις αρχές και ισοστατικοί φορείς
(2) Υπολογισμός των αντιδράσεων στήριξης και των φορτίων διατομής του φορέα υπό την κατάλληλη μοναδιαία δυνατή φόρτιση.
(Ο φορέας φορτίζεται στο σημείο α με ένα μοναδιαίο δυνατό φορτίο 1ν που ανταποκρίνεται εργικά προς τη ζητούμενη μετακίνηση δα).
(3) Άθροιση όλων των παραγόμενων δυνατών συμπληρωματικών έργων, εξίσωσή τους με το μηδέν και επίλυση ως προς τη ζητούμενη μετακίνηση.
Σημείωση: Διατυπώνοντας την ΑΣΔΕ ως We*ν=-Wi*ν παρατηρούμε ότι το εξωτερικό συμπληρωματικό δυνατό έργο We*ν=1ν·δα=δα ταυτίζεται αριθμητικά με τη ζητούμενη μετακίνηση δα, ενώ το εσωτερικό δυνατό έργο Wi*ν υπολογίζεται ως ολοκλήρωμα του γινομένου των φορτίων διατομής του φορέα λόγω της δεδομένης φόρτισης και των φορτίων διατομής του φορέα λόγω του δυνατού μοναδιαίου φορτίου 1ν.
Επαλήθευση-Έλεγχος: Προς επαλήθευση του αποτελέσματος αυτού θα υπολογίσουμε την wα χρησιμοποιώντας τις διαφορικές εξισώσεις κάμψης (βλ. παράγρ. 3.5.2). Για το αριστερό τμήμα της δοκού ισχύει:
( ) ( )
( )
( ) 213
12
cxcxEIF
121xw
cxEIF
41xw:Ολοκλήρωση
xEIF
21
EIxMxw
++−=
+−=′
−=−=′′
•••
••
••
Συνοριακές συνθήκες: ( )
( )EILF
161cc
2L
EIF
41002Lw:2Lx
c000w:0x2
11
2
2
•••• =⇒+⎟
⎠⎞
⎜⎝⎛−=⇒=′=
=⇒==
( ) •• • • •
•• • • • •
= − +
⎛ ⎞ ⎛ ⎞⎛ ⎞= = = − + =⎜ ⎟ ⎜ ⎟⎜ ⎟⎝ ⎠ ⎝ ⎠ ⎝ ⎠
23
3 2
α
1 F 1 F LΆρα : w x x x12 EI 16 EI
L L 1 F L 1 F L L 11και για x : w w4 4 12 EI 64 16 EI 4 768 EI
3FL
Διαπιστώνουμε ότι το αποτέλεσμα είναι ίδιο με εκείνο που βρήκαμε με την ΑΣΔΕ. Η παραπάνω παρουσιασθείσα μέθοδος υπολογισμού μιας μοναχικής μετακίνησης με τη βοήθεια της ΑΣΔΕ αποκαλείται συχνά "μέθοδος των βοηθητικών μοναδιαίων φορτίων" λόγω της χρησιμοποίησης μιας δυνατής (νοητής, "βοηθητικής") εντασιακής κατάστασης που προκαλείται από τη φόρτιση του δεδομένου φορέα με ένα μοναδιαίο αδιάστατο φορτίο 1ν (που είναι το εργικό φορτίο της ζητούμενης μετακίνησης). Στον υπολογισμό παραμορφωσιακών μεγεθών ισοστατικών φορέων με τη βοήθεια της ΑΣΔΕ θα γίνει αναλυτικότερη αναφορά στο κεφάλαιο 9, όπου θα παρουσιαστούν και άλλα αριθμητικά παραδείγματα.
3-223
Σ T
A Τ
Ι Κ Η
Ι

Κεφάλαιο 3. Θεμελιώδεις αρχές της Στατικής των γραμμικών φορέων
3.6.6 Βασικές συνθήκες της Στατικής - Εργικές προτάσεις - Υπολογισμός στατικών μεγεθών
Ο συσχετισμός των στατικών συνθηκών (δηλαδή των συνθηκών ισορροπίας και συμβιβαστού) με τις εργικές αρχές (δηλαδή με την ΑΔΕ και την ΑΣΔΕ) δίνεται στον παρακάτω πίνακα 3.6.6-1 υπό μορφή διαγράμματος.
Πίν. 3.6.6-1 Συσχετισμός στατικών συνθηκών και εργικών αρχών
Συνθήκες ισορροπίας Συνθήκες συμβιβαστού
αμφιμονοσήμαντη σχέση με
Αρχή
των Δυνατών Έργων
(ΑΔΕ) (των νοητών / δυνατών μετακινήσεων
ή των δυνατών παραμορφώσεων)
Αρχή
των Συμπληρωματικών
Δυνατών Έργων (ΑΣΔΕ) (των νοητών / δυνατών φορτίων
ή των δυνατών εντάσεων)
Υπολογισμός
εντασιακών μεγεθών
(αντιδράσεων στήριξης, φορτίων διατομής)
με τη βοήθεια
δυνατών μετακινήσεων
Υπολογισμός
παραμορφωσιακών μεγεθών
(μετακινήσεων, παραμορφώσεων)
με τη βοήθεια
νοητών φορτίων
Στο κεφάλαιο 8 το παραπάνω διάγραμμα θα επεκταθεί έτσι ώστε να δείχνει τον συσχετισμό των εργικών αρχών ΑΔΕ, ΑΣΔΕ και με τις άλλες βασικές αρχές και προτάσεις της Μηχανικής/Στατικής (βλ. παράγρ. 8.13). Το ίδιο διάγραμμα θα συμπληρωθεί αργότερα (βλ. [Αβρ-ΙΙ], παράγρ. 3.9.3, πίνακας 3.9-2) με τρόπο που να κάνει σαφή τη σχέση των εργικών αρχών με τις δύο κλασικές μεθόδους υπολογισμού υπερστατικών φορέων: τη Μέθοδο Δυνάμεων και τη Μέθοδο Μετακινήσεων.
3-224
Σ T
A Τ
Ι Κ Η
Ι

6
ΥΠΟΛΟΓΙΣΜΟΣ ΕΝΤΑΣΙΑΚΩΝ ΜΕΓΕΘΩΝ ΙΣΟΣΤΑΤΙΚΩΝ ΦΟΡΕΩΝ
Σ T
A Τ
Ι Κ Η
Ι

Φωτογραφίες
Άνω: Δικτυωτή πεζογέφυρα από οπλισμένο σκυρόδεμα (Ιταλία)
Κάτω: Δικτυωτή οδογέφυρα από χάλυβα (ΗΠΑ)
Σ T
A Τ
Ι Κ Η
Ι

ΣΤΑΤΙΚΗ ΤΩΝ ΚΑΤΑΣΚΕΥΩΝ - Τόμος Ι - Θεμελιώδεις αρχές και ισοστατικοί φορείς
6. ΥΠΟΛΟΓΙΣΜΟΣ ΕΝΤΑΣΙΑΚΩΝ ΜΕΓΕΘΩΝ ΙΣΟΣΤΑΤΙΚΩΝ ΦΟΡΕΩΝ
6.1 Οι μέθοδοι υπολογισμού εντασιακών μεγεθών Ο υπολογισμός των άγνωστων εξωτερικών και εσωτερικών εντασιακών μεγεθών (βλ. πίν. 3.1.4-1), τα οποία προκαλούνται από σταθερές ή μεταβαλλόμενες δράσεις (φορτία και καταναγκασμούς) που δρουν επάνω στον δομικό φορέα, αποτελεί το "πρώτο βασικό πρόβλημα" της Στατικής των Κατασκευών (Σημ.: Το "δεύτερο βασικό πρόβλημα" συνίσταται στον υπολογισμό των αναπτυσσόμενων παραμορφωσιακών μεγεθών). Όπως γνωρίζουμε, τα άγνωστα εξωτερικά μεγέθη έντασης δεν είναι παρά οι αντιδράσεις στις στηρίξεις του φορέα (βλ. παράγρ. 3.2.5), ενώ τα άγνωστα εσωτερικά μεγέθη έντασης είναι τα φορτία διατομής των δομικών του στοιχείων (βλ. παράγρ. 3.2.6). Εφόσον πρόκειται για ισοστατικούς φορείς, αρκούν για τον μονοσήμαντο υπολογισμό όλων των εντασιακών μεγεθών οι συνθήκες ισορροπίας (Υπενθύμιση: Ο υπολογισμός των εντασιακών μεγεθών υπερστατικών φορέων απαιτεί την παράλληλη ικανοποίηση των συνθηκών συμβιβαστού σε συνδυασμό με τον νόμο υλικής συμπεριφοράς και αποτελεί αντικείμενο του δεύτερου τόμου του παρόντος συγγράμματος [Αβρ-ΙΙ]). Ανάλογα με τον τρόπο ικανοποίησης των συνθηκών ισορροπίας προκύπτουν οι ακόλουθοι τρεις τρόποι υπολογισμού εντασιακών μεγεθών ισοστατικών φορέων:
1. Η μέθοδος των διαχωριστικών τομών σε συνδυασμό με τις συνθήκες ισορροπίας.
2. Η αναλυτική επίλυση (ολοκλήρωση) των διαφορικών εξισώσεων ισορροπίας. 3. Η κινηματική μέθοδος που βασίζεται στην αρχή των δυνατών έργων.
Με τις δύο πρώτες μεθόδους μπορούμε να υπολογίσουμε: (α) τα εντασιακά μεγέθη που αναπτύσσονται σε συγκεκριμένα σημεία του φορέα, όπως π.χ. σε μια στήριξη ή σε μια ορισμένη διατομή του, και (β) τη μεταβολή των φορτίων διατομής κατά μήκος του άξονα των γραμμικών δομικών στοιχείων, δηλαδή τα διαγράμματα Μ(x), Q(x), N(x) κτλ. Η τρίτη μέθοδος, η οποία στηρίζεται στην αρχή των δυνατών έργων, μπορεί να χρησιμοποιηθεί για τον στοχευμένο υπολογισμό ενός σημειακού εντασιακού μεγέθους, π.χ. μιας αντίδρασης στήριξης ή μιας καμπτικής ροπής σε μια συγκεκριμένη διατομή. Αργότερα θα δούμε ότι η κινηματική μέθοδος και η αρχή των δυνατών έργων εφαρμόζονται με ιδιαίτερο πλεονέκτημα και για τον υπολογισμό της γραμμής επιρροής ενός εντασιακού μεγέθους (βλ. κεφ. 10).
Στις παραπάνω τρεις μεθόδους υπολογισμού εντασιακών μεγεθών ισοστατικών φορέων αναφέρονται οι ακόλουθες παράγραφοι 6.2, 6.3 και 6.4 αντίστοιχα. Χάριν απλούστευσης της παρουσίασης θα χρησιμοποιηθούν εδώ ως παραδείγματα μόνο επίπεδοι φορείς, χωρίς όμως αυτό να περιορίζει επί της ουσίας τη γενικότητα των αναπτυσσόμενων μεθόδων υπολογισμού. Παραδείγματα υπολογισμού χωρικών φορέων περιέχονται στον τόμο των ασκήσεων ([Αβρ-Ια], Ασκήσεις σειρών Ζ και Θ).
6-3
Σ T
A Τ
Ι Κ Η
Ι

Κεφάλαιο 6. Υπολογισμός εντασιακών μεγεθών ισοστατικών φορέων
Ιστορική σημείωση: Μέχρι και τα μέσα του 20ου αιώνα ήταν ευρύτατα διαδεδομένη η Γραφική Μέθοδος για τον υπολογισμό των εντασιακών μεγεθών ισοστατικών φορέων. Τις βάσεις της λεγόμενης Γραφοστατικής έθεσε ο Βαυβαρός Κarl Culmann (1821-1881), τότε καθηγητής στο Τεχνικό Πανεπιστήμιο της Ζυρίχης, στο βιβλίο του "Die Graphische Statik" ( Zürich 1866), ενώ στην περαιτέρω ανάπτυξή της συνέβαλαν μεταξύ άλλων ο Ιταλός Luigi Cremona (1830-1903), που εισήγαγε το ομώνυμο "διάγραμμα Cremona" για τον υπολογισμό των αξονικών δυνάμεων στις ράβδους ισοστατικών δικτυωμάτων, ο Γάλλος Μ. Williot, που εισήγαγε το ομώνυμο "διάγραμμα Williot" για τον προσδιορισμό των μετατοπίσεων των κόμβων, o Γερμανός August Ritter (1847-1906), που εισήγαγε τη "μέθοδο των διαχωριστικών τομών" για τον υπολογισμό δικτυωμάτων, και ο επίσης Γερμανός Emil Winkler (1835-1888). Για πολλές δεκαετίες οι μέθοδοι της Γραφοστατικής αποτελούσαν το βασικό υπολογιστικό "εργαλείο" στα χέρια των μηχανικών, μέχρις ότου οι γραφικές μέθοδοι παροπλίστηκαν με την έλευση των αριθμομηχανών. Παρόλο που σήμερα οι μέθοδοι αυτές έχουν περιέλθει σε πλήρη αχρησία, η ενασχόληση μαζί τους έχει περισσότερο από ιστορικό μόνο ενδιαφέρον λόγω του συχνά εξαιρετικά εποπτικού τρόπου με τον οποίο προσδιορίζονταν σχεδιαστικά-διανυσματικά τα εντασιακά μεγέθη. Ο ενδιαφερόμενος αναγνώστης μπορεί να ανατρέξει - πέραν του προαναφερθέντος συγγράμματος του Culmann - στο κλασικό σύγγραμμα του Müller-Breslau (1851-1925), καθηγητή της Στατικής των Κατασκευών στο Τεχνικό Πανεπιστήμιο του Βερολίνου, με τίτλο "Die graphische Statik der Baukonstruktionen" (4. Auflage, 1905, Verlag Alfred Kroener, Stuttgart und Leipzig) ή και σε "νεότερα" συγγράμματα, όπως π.χ. το βιβλίο του R. Kirchhoff, "Die Statik der Baukonstruktionen" (5. Auflage, 1953, Berlag Wilhelm Ernst & Sohn). Σημειώνεται επίσης ότι σε ορισμένες περιπτώσεις ισοστατικών φορέων μπορεί να χρησιμοποιηθεί και η προαναφερθείσα μέθοδος της εναλλαγής ράβδων (βλ. παράγρ. 5.3.2) με πλεονεκτικό τρόπο για τον "χειροκίνητο" υπολογισμό των εντασιακών μεγεθών. Και αυτή η μέθοδος περιγράφεται αναλυτικά σε παλαιότερα συγγράμματα Στατικής, ενώ στο παρόν σύγγραμμα η χρήση της περιορίζεται μόνο στον έλεγχο της κινηματικής ευστάθειας (στερεότητας) δεδομένων φορέων.
6.2 Υπολογισμός εντασιακών μεγεθών με τη μέθοδο των διαχωριστικών τομών και τις συνθήκες ισορροπίας
Η μέθοδος των διαχωριστικών τομών, την οποία έχουμε ήδη εφαρμόσει σε μία σειρά απλών φορέων (βλ. παράγρ. 3.2.5 και 3.2.6), συνίσταται
α) στη θεώρηση νοητών κλειστών1 διαχωριστικών τομών, β) στην προσαγωγή σε όλα τα σημεία τομής εσωτερικών ή εξωτερικών
δεσμικών ράβδων των αντίστοιχων αντιδράσεων ή φορτίων διατομής αντιστοίχως, και
γ) στην κατάστρωση για τον ελεύθερο φορέα ή για το αποσπασθέν τμήμα του των συνθηκών ισορροπίας.
1 Οι κλειστές διαχωριστικές τομές χαρακτηρίζονται επίσης ως 'κυκλικές' τομές όταν πρόκειται για επίπεδους φορείς και ως 'σφαιρικές' όταν πρόκειται για χωρικούς φορείς.
6-4
Σ T
A Τ
Ι Κ Η
Ι

ΣΤΑΤΙΚΗ ΤΩΝ ΚΑΤΑΣΚΕΥΩΝ - Τόμος Ι - Θεμελιώδεις αρχές και ισοστατικοί φορείς
Υπενθυμίζεται ότι στη γενική περίπτωση χωρικών φορέων έχουμε στη διάθεσή μας σύμφωνα με την παράγραφο 3.2.3-Γ (βλ. εξ. (3.2.3-4)) τις έξι στερεοστατικές συνθήκες ισορροπίας:
0F 0F 0F nZnYnX === ∑∑∑ (6.2-1α)
0M0M 0M nZ(i)nY(i)nX(i) === ∑∑∑ , (6.2-1β)
ενώ στην ειδικότερη περίπτωση των επίπεδων φορέων που φορτίζονται μέσα στο επίπεδό τους διαθέτουμε μόνο τρεις. Π.χ., στο επίπεδο X-Z (Σημ.: Κατά κανόνα ο άξονας Χ επιλέγεται ως ο οριζόντιος και ο άξονας Ζ ως ο κατακόρυφος άξονας αναφοράς) διαθέτουμε τις εξής τρεις συνθήκες ισορροπίας:
Άθροισμα οριζοντίων δυνάμεων ίσο με μηδέν: 0FnX =∑ (6.2-2α)
Άθροισμα κατακορύφων δυνάμεων ίσο με μηδέν: 0FnZ =∑ (6.2-2β)
Άθροισμα ροπών ως προς το σημείο i ίσο με μηδέν: 0MnY(i) =∑ (6.2-2γ)
Σημείωση-Υπενθύμιση: Ο δείκτης n είναι ο δείκτης άθροισης και περιλαμβάνει όλα τα σημεία όπου ενεργούν μεγέθη έντασης που πρέπει να ληφθούν υπόψη. Ο δείκτης άθροισης συνήθως παραλείπεται ως αυτονόητος. Ο δείκτης i μέσα σε παρένθεση είναι το τυχόν σημείο ως προς το οποίο σχηματίζονται οι ροπές όλων των εξωτερικών φορτίων (δυνάμεων) ως προς τον άξονα του συστήματος αναφοράς που σημειώνεται πριν από τον δείκτη (i).
Οι νοητές κλειστές διαχωριστικές τομές (για συντόμευση απλά: διαχωριστικές τομές) μπορούν να είναι δύο ειδών:
1-i) Συνολικές τομές, με τις οποίες αποσπάται ολόκληρος ο φορέας από τις στηρίξεις του (Αρχή της αποδέσμευσης του Lagrange, βλ. παράγρ. 3.2.5-Γ). Στην περίπτωση αυτή οι συνθήκες ισορροπίας που καταστρώνονται περιέχουν μόνο τα εξωτερικά φορτία και τις αντιδράσεις στηρίξεων. Αριθμητικά παραδείγματα υπολογισμού των αντιδράσεων στήριξης απλών, ισοστατικά εδραζόμενων φορέων δόθηκαν στην παράγραφο 3.2.5-Δ. Αν ο φορέας είναι μεν συνολικά ισοστατικός, αλλά οι αντιδράσεις των στηρίξεών του είναι περισσότερες από τις διαθέσιμες (3 στο επίπεδο, 6 στον χώρο) συνθήκες ισορροπίας, τότε απαιτείται η θεώρηση και άλλων διαχωριστικών τομών, που περιλαμβάνουν κατάλληλα επιλεγμένα τμήματα του φορέα.
1-ii) Τμηματικές τομές, με τις οποίες αποσπώνται από τον φορέα μικρότερα ή μεγαλύτερα τμήματά του.
Στην περίπτωση αυτή, οι συνθήκες ισορροπίας που καταστρώνονται περιέχουν γενικώς εξωτερικά φορτία, αντιδράσεις στηρίξεων και φορτία διατομής. Ενδέχεται όμως να περιέχουν μόνο εξωτερικά φορτία και
6-5
Σ T
A Τ
Ι Κ Η
Ι

Κεφάλαιο 6. Υπολογισμός εντασιακών μεγεθών ισοστατικών φορέων
φορτία διατομής ή μόνο αντιδράσεις και φορτία διατομής ή και μόνο φορτία διατομής. Αριθμητικά παραδείγματα υπολογισμού των φορτίων διατομής απλών ισοστατικών φορέων δόθηκαν στην παράγραφο 3.2.6-Δ.
2) Κομβικές τομές, με τις οποίες αποσπώνται μεμονωμένοι κόμβοι από τον υπόλοιπο φορέα. Οι κομβικές τομές αποτελούν ειδική περίπτωση των τμηματικών τομών, αφού ένας κόμβος είναι τμήμα (αν και μηδενικών διαστάσεων) του φορέα.
Στην περίπτωση αυτή, οι συνθήκες ισορροπίας που καταστρώνονται περιέχουν τα τυχόν εξωτερικά φορτία που δρουν στον αποσπασθέντα κόμβο, καθώς και τα επικόμβια φορτία των τμηθεισών διατομών.
6.2.1 H μέθοδος των επιλεγμένων διαχωριστικών τομών
(Κατάστρωση ισορροπίας σε ολόκληρο τον φορέα ή σε τμήματά του) Ο υπολογισμός της εντασιακής κατάστασης ενός φορέα (δηλαδή ο υπολογισμός όλων των εντασιακών του μεγεθών) με τη βοήθεια συνολικών ή/και τμηματικών ή/και κομβικών διαχωριστικών τομών απαιτεί κατά κανόνα την προηγούμενη γνώση των αντιδράσεων στήριξης του φορέα και ενδεχομένως, αν ο φορέας αποτελείται από περισσότερους δίσκους, επιπλέον τη γνώση των ενδιάμεσων αντιδράσεων στα σημεία σύνδεσης των δίσκων. Συνεπώς, ο υπολογισμός διεξάγεται σε δύο βήματα:
I. Πρώτα υπολογίζονται οι αντιδράσεις στις στηρίξεις του φορέα (και ενδεχομένως οι ενδιάμεσες αντιδράσεις στα σημεία σύνδεσης των δίσκων από τους οποίους συντίθεται ο φορέας).
II. Σε ένα δεύτερο βήμα, με γνωστές πλέον τις αντιδράσεις στήριξης (και ενδεχομένως τις ενδιάμεσες αντιδράσεις), επιλέγονται οι κατάλληλες διαχωριστικές τομές για τον υπολογισμό των ζητούμενων φορτίων διατομής και καταστρώνονται για το εκάστοτε διαχωρισθέν τμήμα του φορέα οι συνθήκες ισορροπίας.
Α. Υπολογισμός των αντιδράσεων στήριξης ενός φορέα που ως ελεύθερο σώμα αποτελεί έναν στερεό δίσκο
Όπως γνωρίζουμε (βλ. παράγρ. 3.2.4), η ισοστατική στήριξη ενός φορέα, που θεωρούμενος ως ελεύθερο σώμα αποτελεί έναν στερεό δίσκο, απαιτεί (α) τρεις δρομικές δεσμικές ράβδους αν είναι επίπεδος και φορτίζεται μέσα στο επίπεδό του και (β) έξι δρομικές δεσμικές ράβδους αν είναι χωρικός. Προκειμένου η στήριξη να είναι κινηματικά ευσταθής, οι άξονες των δρομικών δεσμικών αυτών ράβδων θα πρέπει στη μεν περίπτωση του επίπεδου φορέα να μην τέμνονται σε ένα σημείο (και κατά συνέπεια: να μην είναι παράλληλες), στη δε περίπτωση του χωρικού φορέα να μην τέμνουν την ίδια ευθεία. (Σημ.: Σε περίπτωση χρήσης όχι μόνο δρομικών, αλλά και στροφικών δεσμικών ράβδων ισχύουν ανάλογοι κανόνες που εξασφαλίζουν την κινηματική ευστάθεια και την ισοστατικότητα).
6-6
Σ T
A Τ
Ι Κ Η
Ι

ΣΤΑΤΙΚΗ ΤΩΝ ΚΑΤΑΣΚΕΥΩΝ - Τόμος Ι - Θεμελιώδεις αρχές και ισοστατικοί φορείς
Για να υπολογίσουμε τώρα αυτές τις (τρεις ή έξι) αντιδράσεις στήριξης αναλύουμε όλα τα δεδομένα εξωτερικά φορτία (δυνάμεις και ροπές) και όλες τις αντιδράσεις στήριξης σε συνιστώσες κατά την έννοια των (δύο ή τριών) αξόνων συντεταγμένων του καθολικού συστήματος αναφοράς και στη συνέχεια καταστρώνουμε τις (τρεις ή έξι) συνθήκες ισορροπίας (εξ. (6.2-2) ή εξ. (6.2-1)). Π.χ., στην περίπτωση του επίπεδου φορέα του σχήματος 6.2.1-1(α) καταστρώνουμε δύο
cZ
∏
∏
∏
k
i
j
2A3A
1A
1α
2α3α
1
2
3
1X2X
iX
XZ
4P
4α
kXjX
3X
kZjZ
iZ
1Z2Z
3Z
4
4Z
O
4X
c ∏
2A
1A
1α
2α
1
2
3A3
∏ 4
4P
4α(β)
3α
(β1) (β2)
∏ ∏
QcΜc Μc
QcΝc Νc
(α)
cZ
∏
c c
cX
κέντροβάρουςδιατομής
XZ
O
cX
Σχ. 6.2.1-1 Υπολογισμός (α) αντιδράσεων στήριξης και (β) φορτίων διατομής ενός ισοστατικά
εδραζόμενου δίσκου στο επίπεδο
6-7
Σ T
A Τ
Ι Κ Η
Ι

Κεφάλαιο 6. Υπολογισμός εντασιακών μεγεθών ισοστατικών φορέων
συνθήκες ισορροπίας δυνάμεων κατά Χ και κατά Ζ, και μία συνθήκη ισορροπίας ροπών ως προς ένα οποιοδήποτε σημείο (εδώ ως προς την αρχή Ο του συστήματος αναφοράς):
( ) ( ) (
( ) ( 0cosαZsinαXPcosαZsinαXA
cosαZsinαXAcosαZsinαXA:0M
0sinαΡsinαAsinαAsinαA:0F
0cosαΡcosαAcosαAcosαA:0F
4444433333
22222111110Y
44332211Z
44332211X
=−−−+
++++=
=+−−−=
=+−+=
••••••
••••••
••••
••••
∑
∑
∑
)
)
(6.2.1-1)
Η επίλυση του συστήματος των τριών αυτών γραμμικών εξισώσεων μας δίνει τις τιμές των ζητούμενων αντιδράσεων στήριξης του επίπεδου φορέα. Σε χωρικούς φορείς ο υπολογισμός των έξι αντιδράσεων στήριξης απαιτεί προφανώς την επίλυση ενός συστήματος έξι γραμμικών εξισώσεων ισορροπίας.
Η αναγκαιότητα επίλυσης συστημάτων γραμμικών εξισώσεων μπορεί εντούτοις σε πολλές περιπτώσεις να παρακαμφθεί. Πράγματι, δεδομένου ότι η συνθήκη ισορροπίας των ροπών μπορεί να καταστρωθεί ως προς έναν οποιονδήποτε άξονα στον χώρο ή ως προς ένα οποιοδήποτε σημείο του επιπέδου (και όχι αναγκαστικά ως προς την αρχή Ο του καθολικού συστήματος αναφοράς που χρησιμοποιήσαμε παραπάνω), μας δίνει τη δυνατότητα να υπολογίσουμε ξεχωριστά κάθε αντίδραση στήριξης από μία και μόνο εξίσωση. Έτσι, καταστρώνοντας για το παράδειγμα του σχήματος 6.2.1-1(α) τις συνθήκες ισορροπίας ροπών διαδοχικά ως προς τα τρία σημεία i, j και k, στα οποία τέμνονται ανά δύο οι άξονες των δρομικών ράβδων στήριξης, παίρνουμε κάθε φορά μία εξίσωση για την τρίτη αντίδραση στήριξης (της οποίας ο άξονας δεν διέρχεται από το χρησιμοποιηθέν σημείο):
( ) ( ) ( )[ ]
( ) ( )[ ]
( ) ( ) ( )[ ]( ) ( )[ ]
( ) ( ) ( )[ ]
( ) ( )[ ] 0cosαΖΖsinαXXP
cosαΖΖsinαXXA:0M
0cosαΖΖsinαXXP
cosαΖΖsinαXXA:0M
0cosαΖΖsinαXXP
cosαΖΖsinαXXA:0M
4k44k44
1k11k11kY
4j44j44
2j22j22jY
4i44i44
3i33i33iY
=−+−−+
+−+−=
=−+−−+
+−+−=
=−+−−+
+−−−=
•••
•••
•••
•••
•••
•••
∑
∑
∑
(6.2.1-2)
Είναι σαφές ότι η δυνατότητα υπολογισμού των τριών αντιδράσεων στήριξης ενός επίπεδου φορέα από μεμονωμένες εξισώσεις ισορροπίας ροπών υφίσταται μόνο αν τα σημεία τομής των αξόνων δράσης τους σχηματίζουν ένα τρίγωνο (Στο παραπάνω παράδειγμα είναι το τρίγωνο i-j-k. Επίσης βλ. Σχ. 6.2.1-2(α,β)).
6-8
Σ T
A Τ
Ι Κ Η
Ι

ΣΤΑΤΙΚΗ ΤΩΝ ΚΑΤΑΣΚΕΥΩΝ - Τόμος Ι - Θεμελιώδεις αρχές και ισοστατικοί φορείς
Αν το ένα από τα τρία σημεία τομής βρίσκεται στο άπειρο, τότε οι δύο εκ των τριών αντιδράσεων μπορούν να υπολογιστούν από συνθήκες ισορροπίας ροπών ως προς κατάλληλα σημεία, ενώ για την τρίτη απαιτείται μία εξίσωση ισορροπίας δυνάμεων (βλ. Σχ. 6.2.1-2(γ,δ)).
A3
A2∏
F
∏
k¶
(δ) (ε)
A3
k
(ζ)
A1
F F
A3
F
i,j,k¶
iA2
A1 A3
kj¶
A1
i,j,k
A2 A2
χαλαρός φορέας χαλαρός φορέας‡
(απειροστή στροφήως προς i δυνατή)
‡
(πεπερασμένηπαράλληλημετάθεση δυνατή)
(α)
XZ
A1 A3
A2k i
j
∏ ∏
(γ)
i j
(β)
A3
A2ki
j ∏
A1
F F
A1
( )
( )
( ) ...A0M
...A0M
...A0M
1k
2j
3i
=⇒=
=⇒=
=⇒=
∑∑∑ ( )
( )
...A0F
...A0M
...A0M
2X
1j
3i
=⇒=
=⇒=
=⇒=
∑∑∑
( )
( )
...A0F
...A0M
...A0M
2X
1k
3i
=⇒=
=⇒=
=⇒=
∑∑∑
Σχ. 6.2.1-2 Διάφορες περιπτώσεις στήριξης και χρησιμοποίησης συνθηκών ισορροπίας
ροπών για τον υπολογισμό των αντιδράσεων ενός δίσκου στο επίπεδο
Αν όμως οι άξονες των αντιδράσεων συντρέχουν σε ένα σημείο (όπως π.χ. στον φορέα του σχήματος 6.2.1-2(ε)) ή τέμνονται στο άπειρο (δηλ. είναι παράλληλες
6-9
Σ T
A Τ
Ι Κ Η
Ι

Κεφάλαιο 6. Υπολογισμός εντασιακών μεγεθών ισοστατικών φορέων
μεταξύ τους, όπως στον φορέα του σχήματος 6.2.1-2(ζ)), τότε ο υπολογισμός των αντιδράσεων δεν είναι δυνατός, αφού δεν πληρούνται οι προϋποθέσεις κινηματικής ευστάθειας και κατά συνέπεια είναι αδύνατο να ικανοποιηθούν οι συνθήκες ισορροπίας.
Τέλος, σημειώνεται ότι αν για τον υπολογισμό των αντιδράσεων στήριξης χρησιμοποιηθούν συνθήκες ισορροπίας ροπών, οι δύο συνθήκες ισορροπίας δυνάμεων (ΣFX=0, ΣFΖ=0) μπορούν να χρησιμοποιηθούν για τον έλεγχο των υπολογισθεισών τιμών των αντιδράσεων, κάτι που συνιστάται σε κάθε περίπτωση.
Η παραπάνω περιγραφείσα διαδικασία άμεσου υπολογισμού (δηλ. χωρίς επίλυση ενός συστήματος γραμμικών εξισώσεων) των αντιδράσεων στήριξης επίπεδων δίσκων με τη βοήθεια συνθηκών ισορροπίας ροπών αντί των αρχικών εξισώσεων ισορροπίας δυνάμεων μπορεί, όπως αντιλαμβάνεται εύκολα ο αναγνώστης, να επεκταθεί χωρίς δυσκολία και σε χωρικούς φορείς.
Β. Υπολογισμός των αντιδράσεων στήριξης και των ενδιάμεσων αντιδράσεων ενός φορέα που ως ελεύθερο σώμα δεν αποτελεί στερεό δίσκο
Ένας ισοστατικός φορέας δεν είναι βέβαια πάντα ένας ισοστατικά εδραζόμενος δίσκος. Αντίθετα, ο φορέας μπορεί να αποτελείται από περισσότερους δίσκους, αρθρωτά συνδεδεμένους μεταξύ τους, οι οποίοι ως ελεύθερο σύμπλεγμα δεν αποτελούν στερεό δίσκο, αλλά λαμβανομένων υπόψη των στηρίξεων του φορέα συνθέτουν συνολικώς ένα στερεά εδραζόμενο ισοστατικό σύμπλεγμα. Η απλούστερη περίπτωση τέτοιου φορέα είναι το "τριαρθρωτό τόξο" (η λέξη 'τόξο' χρησιμοποιείται εδώ με γενικευμένη σημασία) που αποτελείται από δύο στερεούς δίσκους που συνδέονται μεταξύ τους και με το έδαφος μέσω καμπτικών αρθρώσεων (Σχ. 6.2.1-3). Ο υπολογισμός των αντιδράσεων στήριξης μπορεί να γίνει με δύο τρόπους:
(α) Ο πρώτος συνίσταται στην κατάστρωση όλων των συνθηκών ισορροπίας για τον συνολικό φορέα, καθώς και όλων των μεταβατικών συνθηκών για τα αντίστοιχα τμήματα του φορέα (Σχ. 6.2.1-3(α)). (Σημ.: Μεταβατική ονομάζουμε μία στατική συνθήκη που περιγράφει μία ενδιάμεση άρθρωση).
(β) Ο δεύτερος συνίσταται στον διαχωρισμό των επί μέρους δίσκων, από τους οποίους αποτελείται ο δεδομένος φορέας (στον τριαρθρωτό φορέα μας: των δύο δίσκων Ι και ΙΙ), με νοητές τομές και στην κατάστρωση των συνθηκών ισορροπίας για κάθε δίσκο ξεχωριστά (Σχ. 6.2.1-3(β)). Στις συνθήκες ισορροπίας των επί μέρους δίσκων υπεισέρχονται βέβαια οι ενδιάμεσες αντιδράσεις που δρουν στα σημεία συνάρθρωσης των δίσκων.
Και στις δύο παραπάνω περιπτώσεις το συνολικό πλήθος των αγνώστων αντιδράσεων είναι ίσο με το πλήθος των διαθέσιμων συνθηκών ισορροπίας, οπότε ο προσδιορισμός των τελευταίων είναι μονοσήμαντος. Όπως και στην περίπτωση
6-10
Σ T
A Τ
Ι Κ Η
Ι

ΣΤΑΤΙΚΗ ΤΩΝ ΚΑΤΑΣΚΕΥΩΝ - Τόμος Ι - Θεμελιώδεις αρχές και ισοστατικοί φορείς
του φορέα που αποτελείται από έναν μόνο δίσκο, έτσι και εδώ είναι δυνατή η αντικατάσταση μιας ή περισσοτέρων συνθηκών ισορροπίας δυνάμεων από συνθήκες ισορροπίας ροπών ως προς κατάλληλα επιλεγμένα σημεία με τέτοιο τρόπο ώστε να αποφεύγεται η επίλυση συστήματος εξισώσεων.
AΖ1
AΧ3 AΖ3
Ι ΙΙ
A
AΧ1AΖ1
AΧ3
AΖ3
Ζ2
AΖ2
νοητήτομή
AΧ2
AΧ2
Ι ΙΙ
31
2
XZ
AΧ1
Συνθήκες ισορροπίας για κάθε δίσκο (Ι και ΙΙ) ξεχωριστά:
( )∑∑∑
=
=
=
0M
0F
0F
Ij
IZ
IX
( )∑∑∑
=
=
=
0M
0F
0F
IIk
IIZ
IIX
Συνθήκες ισορροπίας για τον συνολικό φορέα:
( )∑∑∑
=
=
=
0M
0F
0F
i
Z
X
(i τυχαίο σημείο)
Μεταβατική συνθήκη:
( )
( )∑∑
=
=
0Mή
0M
δεξ2,
αριστ2,
Άγνωστες αντιδράσεις: ΑΧ1, ΑΖ1, ΑΧ3, ΑΖ3
(j, k τυχαία σημεία)
Άγνωστες αντιδράσεις: ΑΧ1, ΑΖ1, ΑΧ2, ΑΖ2, ΑΧ3, ΑΖ3
(α) (β) Σχ. 6.2.1-3 Υπολογισμός αντιδράσεων στήριξης ενός επίπεδου τριαρθρωτού φορέα
Γ. Υπολογισμός των φορτίων διατομής Μετά τον υπολογισμό όλων των αντιδράσεων στις στηρίξεις του φορέα (και ενδεχομένως των ενδιάμεσων αντιδράσεων στα σημεία σύνδεσης των δίσκων από τους οποίους συντίθεται ο φορέας) προχωρούμε στον υπολογισμό των φορτίων διατομής. Όπως ήδη γνωρίζουμε από την παράγραφο 3.2.6, ο υπολογισμός των φορτίων διατομής ακολουθεί τα εξής βήματα: α) Επιλέγεται μία κατάλληλη κλειστή διαχωριστική τομή (κυκλική σε επίπεδους
και σφαιρική σε χωρικούς φορείς) που τέμνει (μεταξύ άλλων) εκείνη ακριβώς τη διατομή, στην οποία δρα το εκάστοτε ζητούμενο φορτίο διατομής.
β) Στις θέσεις όλων των συνδέσμων που καταλύθηκαν με τη διαχωριστική τομή εισάγονται τα αντίστοιχα (εργικώς ανταποκρινόμενα) εντασιακά
6-11
Σ T
A Τ
Ι Κ Η
Ι

Κεφάλαιο 6. Υπολογισμός εντασιακών μεγεθών ισοστατικών φορέων
μεγέθη (μεταξύ αυτών και το ζητούμενο) με την ορισθείσα συμβατικά θετική φορά τους.
γ) Για το εκάστοτε διαχωρισθέν τμήμα του φορέα καταστρώνονται εκείνες οι συνθήκες ισορροπίας που περιλαμβάνουν ως άγνωστο μέγεθος μόνο το ζητούμενο φορτίο διατομής.
Σημείωση 1: Σύμβαση συμβολισμού φορτίων διατομής στα άκρα δομικών στοιχείων Τα εντασιακά μεγέθη που αναπτύσσονται στα άκρα ενός δομικού στοιχείου i-k χαρακτηρίζονται για μεν το ('αριστερό') άκρο i με τους κάτω δείκτες ik, για δε το δεξιό άκρο k με τους κάτω δείκτες ki. Από τους δύο αυτούς δείκτες ο πρώτος αναφέρεται στο άκρο του στοιχείου όπου αναπτύσσεται το εντασιακό μέγεθος και ο δεύτερος αναφέρεται στο απέναντι άκρο του στοιχείου αυτού. Έτσι, π.χ., οι ροπές στα άκρα i και k ενός στοιχείου i-k συμβολίζονται ως Mik και Mki αντίστοιχα. Αν στον κόμβο α ενός φορέα συντρέχουν τα τρία γραμμικά στοιχεία α-β, α-γ και α-δ, τότε οι ροπές γύρω από τον κόμβο α (δηλαδή οι επικόμβιες ροπές των τριών αυτών στοιχείων) χαρακτηρίζονται ως Mαβ, Mαγ και Mαδ. Ένα απλό παράδειγμα δίνεται στο παρακάτω σχήμα 6.2.1-4.
1 2 3 4
5
M23M21M1 ή M12 M34M32
M25
M5 ή M52
Σχ. 6.2.1-4 Συμβολισμοί ροπών κάμψης στα άκρα των δομικών στοιχείων
Σημείωση 2: Σύμβαση για τη σχεδίαση των βελών που συμβολίζουν φορτία διατομής Τα βελάκια που συμβολίζουν εσωτερικά εντασιακά μεγέθη (δυνάμεις ή ροπές) σχεδιάζονται πάντοτε έτσι, ώστε να δείχνουν τη συμβατικά θετική φορά του αντίστοιχου μεγέθους. Η πραγματική φορά ενός εντασιακού μεγέθους προκύπτει από τη φορά που έχει το βελάκι που το συμβολίζει σε συνδυασμό με το πρόσημο που έχει η αριθμητική τιμή του μεγέθους αυτού. Αν η τιμή είναι θετική, τότε η πραγματική φορά του μεγέθους συμπίπτει με τη συμβατικά θετική του φορά. Αν η τιμή είναι αρνητική, τότε η πραγματική φορά είναι ακριβώς αντίθετη της συμβατικά θετικής. Είναι βέβαια δυνατόν να σχεδιάσει κανείς το βελάκι που συμβολίζει ένα εντασιακό μέγεθος, π.χ. τη ροπή στο άκρο i ενός στοιχείου i-k, με φορά αντίθετη της συμβατικά θετικής. Τότε όμως το βελάκι συμβολίζει όχι τη Μik, αλλά τη -Mik, και επομένως δίπλα στο βελάκι πρέπει να γράφεται -Mik (και όχι Mik). Με τον τρόπο αυτόν επιτυγχάνεται στα χρησιμοποιούμενα κατά τους υπολογισμούς σχήματα ένας ενιαίος συμβολισμός των φορτίων διατομής και αποφεύγονται τα ιδιαιτέρως επικίνδυνα λάθη προσήμου.
6-12
Σ T
A Τ
Ι Κ Η
Ι

ΣΤΑΤΙΚΗ ΤΩΝ ΚΑΤΑΣΚΕΥΩΝ - Τόμος Ι - Θεμελιώδεις αρχές και ισοστατικοί φορείς
Επανερχόμαστε τώρα στην περίπτωση του επίπεδου φορέα του σχήματος 6.2.1-1(α). Ο υπολογισμός της αξονικής δύναμης Νc, της τέμνουσας δύναμης Qc και της ροπής κάμψης Μc της τυχούσας διατομής c γίνεται είτε με τη βοήθεια των τριών εξισώσεων που αφορούν στο αριστερό τμήμα (βλ. Σχ. 6.2.1-1(β1)):
( ) ( ) ( )[ ]
( ) ( )[ ] ....Μ0cosαΖΖsinαXXA
cosαΖΖsinαXXAΜ:0M
....Q0sinαAsinαAQ:0F
....N0cosαAcosαAN:0F
c22c22c2
11c11c1cc
c2211cZ
c2211cX
=⇒=−−−−
−−−−−=
=⇒=−−=
=⇒=++=
•••
•••
••
••
∑
∑
∑
(6.2.1-3)
είτε με τη βοήθεια των τριών εξισώσεων που αφορούν στο δεξιό τμήμα (βλ. Σχ. 6.2.1-1(β2)):
( ) ( ) ( )[ ]
( ) ( )[ ] ....Μ0cosαΖΖsinαXXA
cosαΖΖsinαXXPΜ:0M
....Q0sinαAsinαPQ:0F
....N0cosαAcosαPN:0F
c3c33c33
4c44c44cc
c3344cZ
c3344cX
=⇒=−−−+
+−−−−−=
=⇒=−+−=
=⇒=−+−=
•••
•••
••
••
∑
∑
∑
(6.2.1-4)
Επειδή οι προκύπτουσες τιμές των φορτίων διατομής είναι προφανώς ίδιες και στις δύο παραπάνω περιπτώσεις, μπορεί η μία από αυτές να χρησιμοποιηθεί για τον έλεγχο των αποτελεσμάτων που προέκυψαν με τη βοήθεια της άλλης.
Δ. Παράδειγμα Για τον απλό επίπεδο ισοστατικό φορέα του σχήματος 6.2.1-5 ζητούνται οι αντιδράσεις στήριξης και τα φορτία διατομής στα σημεία 1, 2, 3 και 4 με εφαρμογή της μεθόδου των διαχωριστικών τομών και των συνθηκών ισορροπίας.
iXF
3
241 ∏
q
LM
H
ZF
Z3
L
L/2
α
A
AX1AZ1
XZ
H Σχ. 6.2.1-5 Παράδειγμα υπολογισμού εντασιακών μεγεθών με διαχωριστικές τομές και
συνθήκες ισορροπίας
6-13
Σ T
A Τ
Ι Κ Η
Ι

Κεφάλαιο 6. Υπολογισμός εντασιακών μεγεθών ισοστατικών φορέων
Σύμφωνα με τα όσα αναπτύχθηκαν παραπάνω, υπολογίζουμε πρώτα τις τρεις αντιδράσεις στήριξης του φορέα χρησιμοποιώντας μία συνθήκη ισορροπίας δυνάμεων και δύο συνθήκες ισορροπίας ροπών:
( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )( )
( ) ( ) ( )
( ) ( ) ( ) 0!
HFHFMH2LLqHLΑHΑΜ
0!
AFLqAF
:Έλεγχοι
HLM
HLHF
HLH2LLqA
0MHFH2LLqHLA:0M
HLM
HLLF
HL2LqA
0MLF2LLqHLA:0M
FA0FA:0F
ΧZLZ1Χ13
Z3ZZ1Z
LZZ1
LZZ1i
LZ2
Z3
LZZ31
XX1XX1X
=−+++++−=
=−++−=
++
++
++
=⇒
=+++++−=
+−
++
+=⇒
=+−−+=
=⇒=+−=
••••••
•
•••
••••
•
•
•
••••
∑
∑
∑
∑
∑
(6.2.1-5)
Η μη χρησιμοποιηθείσα συνθήκη ισορροπίας ΣFZ=0 μπορεί να χρησιμοποιηθεί για έναν ανεξάρτητο έλεγχο των υπολογισθεισών κατακορύφων αντιδράσεων ΑΖ1 και ΑΖ3, ενώ η συνθήκη ισορροπίας ροπών ΣΜ(3)=0 ως προς το σημείο 3 (ή ΣΜ(i)=0 ως προς κάποιο άλλο κατάλληλο σημείο i) μπορεί να χρησιμοποιηθεί για τον έλεγχο της οριζόντιας αντίδρασης ΑΧ1.
Με γνωστές όλες τις αντιδράσεις στήριξης, ο υπολογισμός των ζητούμενων φορτίων διατομής στα σημεία 1, 2, 3 και 4 γίνεται με τη βοήθεια επιλεγμένων διαχωριστικών τομών, π.χ. των πέντε διαχωριστικών κυκλικών τομών Ι, ΙΙ, ΙΙΙ, IVa ή IVb και Va ή Vb που δίνονται στον πίνακα 6.2.1-1. Προκειμένου να καταστρωθούν οι εξισώσεις ισορροπίας κόμβων, προσάγονται στις όχθες των τομών τα φορτία διατομής (Μ, Q, N) που αντιστοιχούν στους καταλυθέντες εσωτερικούς συνδέσμους. Παρατηρούμε ότι παρόλο που ζητούνται τα φορτία διατομής σε τέσσερα σημεία (1, 2, 3, 4), για τον υπολογισμό τους απαιτούνται πέντε τομές, διότι στο σημείο 2 αλλάζει η διεύθυνση του άξονα της δοκού και συνεπώς τα εκατέρωθεν του σημείου 2 φορτία διατομής αναφέρονται σε διαφορετικό τοπικό σύστημα αναφοράς. Για τον λόγο αυτόν οι αξονικές και οι τέμνουσες δυνάμεις εκατέρωθεν του σημείου 2 χαρακτηρίζονται από δύο δείκτες, μέσω των οποίων προσδιορίζεται μονοσήμαντα η θέση τους (21=αριστερά του σημείου 2 και 23=δεξιά του σημείου 2). Αντίθετα, για τις αξονικές και τέμνουσες δυνάμεις στα υπόλοιπα σημεία 1,3 και 4 αρκεί ένας μόνο δείκτης. Αλλά και για τις ροπές εκατέρωθεν του σημείου 2, οι οποίες αναφέρονται στον ίδιο άξονα Υ≡y και συνεπώς δεν επηρεάζονται από την αλλαγή διεύθυνσης του άξονα x της δοκού στο επίπεδο Χ-Ζ, απαιτούνται δύο δείκτες, επειδή ακριβώς επάνω στον κόμβο 2 ενεργεί η συγκεντρωμένη εξωτερική ροπή ΜL.
6-14
Σ T
A Τ
Ι Κ Η
Ι

ΣΤΑΤΙΚΗ ΤΩΝ ΚΑΤΑΣΚΕΥΩΝ - Τόμος Ι - Θεμελιώδεις αρχές και ισοστατικοί φορείς
Πίνακας 6.2.1-1 Μέθοδος των επιλεγμένων διαχωριστικών τομών - Παράδειγμα. Διαχωριστικές τομές Ι ÷ V για τον υπολογισμό των Μ,Q,N στα σημεία 1,2,3,4
AX1
AX1
L
qAX1
AZ1
123M
23N23Q
Τομή ΙVa2
ZF
XFLM
αxz
Τομή ΙVb
Hα
HAZ3
xz
23M23N
23Q
L
q
AZ1
1
3M
3N3Q
Τομή Va2
ZF
XFLM
xzα
Τομή Vb
α
AZ3
xz
3M3N
3Q
3
3
1M
1N1Q
AX1
AZ1
L/2
q
1
AX1
AZ1
1
4M
4N
4Q4
XZ
Τομή Ι
Τομή ΙI
q
L
1AZ1
21M
21N
21Q
Τομή ΙII2
Για κάθε ένα από τα τμήματα του φορέα που έχουν αποσπαστεί με τις κυκλικές διαχωριστικές τομές Ι έως V καταστρώνονται οι συνθήκες ισορροπίας (Πίν. 6.2.1-2), από τις οποίες προκύπτουν τα ζητούμενα φορτία διατομής στα σημεία 1, 2, 3 και 4. Ο υπολογισμός των φορτίων διατομής Μ23, Q23, N23 δεξιά του κόμβου 2 μπορεί να γίνει με τη βοήθεια της τομής IVa ή της τομής ΙVb. Όπως εύκολα διαπιστώνουμε, η χρησιμοποίηση της τομής ΙVb απαιτεί λιγότερες αριθμητικές πράξεις από εκείνες που απαιτεί η τομή IVa και γι' αυτό είναι προτιμητέα. Το ίδιο ισχύει και για την τομή Vb έναντι της Va, με τις οποίες υπολογίζονται τα φορτία διατομής Μ3, Q3, N3 στο σημείο 3.
6-15
Σ T
A Τ
Ι Κ Η
Ι

Κεφάλαιο 6. Υπολογισμός εντασιακών μεγεθών ισοστατικών φορέων
Πίνακας 6.2.1-2 Μέθοδος των επιλεγμένων διαχωριστικών τομών - Παράδειγμα: Συνθήκες ισορροπίας για τις κυκλικές διαχωριστικές τομές Ι έως V
Συνθήκες ισορροπίας
∑∑
=
=
0Fή
0F
x
X ∑∑
=
=
0Fή
0F
z
Z ( )∑ = 0M i
Τομή Ι
X11
1X1
AN
0NA
=⇒
=+− Z11
1Z1
AQ
0QA
=⇒
=+− 0M:1i == 1
Τομή ΙΙ
X14 AN =⇒
4X1 0NA =+− ( )( )2LqAQ Z14 •−=⇒
0Q2LqA 4Z1 • =++−
⎟⎟⎠
⎞⎜⎜⎝
⎛−⎟
⎠⎞
⎜⎝⎛=⇒
=−⎟⎠⎞
⎜⎝⎛+
=
••
•••
8Lq
2LAM
02LA
4L
2LqM
4i
2
Z14
Z14
:
Τομή ΙΙΙ
X121 AN =⇒
21X1 0NA =+− LqAQ Z121 •−=⇒
0QLqA 21Z1 • =++− ( )
⎟⎟⎠
⎞⎜⎜⎝
⎛−=⇒
=−+
=
••
•••
2LqLAM
0LA2LLqM
:21ik
2
Z121
Z121
Τομή IVa
( )( )0
sinαALqF
cosαAFN
Z1Z
X1X23
=
−++
....N23 =⇒
+−+
••
• ( )( )0
cosαALqFsinαAFQ
Z1Z
X1X23
=−++
+−−••
•
....Q23 =⇒⎟⎟⎠
⎞⎜⎜⎝
⎛−−=⇒
=−
−⎟⎠⎞
⎜⎝⎛++
=
••
•
••
2LqMLAM
0LA
2LLqMM
:23ik
2
LZ123
Z1
L23
Τομή IVb sinαAN
0sinαAN Z323
•
•
−=⇒ Z323
=−− cosαAQ
0cosαAQ Z323
•
•
−=⇒ Z323
=−−
HAM
0HAM
:23ik
Z323
Z323
•
•
=⇒
=+−
=
Τομή Va
Η κατάστρωση των τριών συνθηκών ισορροπίας για την τομή αυτή επαφίεται ως άσκηση στον αναγνώστη.
Τομή Vb sinαAN
0sinαAN
Z33
Z33
•
•
−=⇒
=−− cosαAQ
0cosαAQ
Z33
Z33
•
•
−=⇒
=−− 0M =3
6-16
Σ T
A Τ
Ι Κ Η
Ι

ΣΤΑΤΙΚΗ ΤΩΝ ΚΑΤΑΣΚΕΥΩΝ - Τόμος Ι - Θεμελιώδεις αρχές και ισοστατικοί φορείς
Ε. Σχετικά με την 'έξυπνη' επιλογή των διαχωριστικών τομών Από τα παραπάνω καθίσταται φανερό ότι η μέθοδος των επιλεγμένων διαχωριστικών τομών με εφαρμογή των συνθηκών ισορροπίας σε ολόκληρο ή σε τμήματα του φορέα συνιστά μία πολύ εποπτική και εύκολα εφαρμόσιμη διαδικασία. Εντούτοις, ο υπολογιστικός φόρτος τον οποίο συνεπάγεται, εξαρτάται σε μεγάλο βαθμό από την επιδέξια ('έξυπνη') επιλογή των διαχωριστικών τομών, πράγμα που με τη σειρά του εξαρτάται από την ικανότητα του μελετητή να κατανοήσει τη δομή και λειτουργία του στατικού φορέα. Για τον λόγο αυτόν η μέθοδος των επιλεγμένων διαχωριστικών τομών δεν ενδείκνυται ιδιαιτέρως για τυποποίηση, κωδικοποίηση και προγραμματισμό σε ηλεκτρονικό υπολογιστή, σε αντίθεση με τη μέθοδο των αποκλειστικά κομβικών διαχωριστικών τομών που θα αναπτυχθεί στην ακόλουθη παράγραφο 6.2.2. Η εξάρτηση της μεθόδου των επιλεγμένων διαχωριστικών τομών από την 'έξυπνη' επιλογή των τομών γίνεται εύκολα κατανοητή με τη βοήθεια των ακόλουθων παραδειγμάτων.
Για τον φορέα του σχήματος 6.2.1-6 ζητείται η τιμή της αξονικής δύναμης στο στοιχείο 1-5 λόγω ενός φορτίου F που δρα (α) στη δοκό 3-4 και (β) στη δοκό 1-5. Σε αμφότερες τις περιπτώσεις φόρτισης ο υπολογισμός των τριών αντιδράσεων στήριξης γίνεται με τη βοήθεια της ίδιας διαχωριστικής τομής Ι. Στη συνέχεια, για την περίπτωση (α) η ζητούμενη αξονική δύναμη Ν15 υπολογίζεται άμεσα με τη βοήθεια της διαχωριστικής τομής ΙΙa και τη συνθήκη ισορροπίας ροπών ως προς το σημείο 3 (Σχ. 6.2.1-6(α)). Εναλλακτικά, για τον άμεσο υπολογισμό της Ν15 θα μπορούσε να χρησιμοποιηθεί η διαχωριστική τομή ΙΙb και η ίδια συνθήκη ισορροπίας. Σημειώνεται ότι στην περίπτωση φόρτισης (α) το στοιχείο 1-5 έχει μηδενικές ροπές και τέμνουσες, αποτελεί δηλαδή ράβδο με μόνο φορτίο διατομής τη ζητούμενη αξονική δύναμη.
Αντίθετα, στην περίπτωση φόρτισης (β) το στοιχείο 1-5 δέχεται εγκάρσιο φορτίο στο σημείο k και συνεπώς λειτουργεί ως δοκός με μη μηδενικές ροπές, τέμνουσες και αξονικές δυνάμεις (Σχ. 2.6.1-6(β)). Μάλιστα, λόγω της κλίσης του στοιχείου 1-5 το φορτίο F έχει και μία αξονική συνιστώσα, γεγονός που συνεπάγεται διαφορετική αξονική δύναμη εκατέρωθεν του σημείου k εφαρμογής του (Ν15=Ν1k≠Νk5=Ν51). Έστω λοιπόν ότι θέλουμε να υπολογίσουμε την αξονική δύναμη Ν1k. Χρησιμοποιώντας όπως στην περίπτωση φόρτισης (α) την ίδια τομή IIa, η οποία τέμνει το στοιχείο 1-5 στο σημείο i που βρίσκεται στο τμήμα 1-k, παίρνουμε από τη συνθήκη ισορροπίας ροπών ως προς το σημείο 3 μία εξίσωση, η οποία περιέχει όχι μόνο τη ζητούμενη Νi=Ν1k, αλλά επιπλέον τα άγνωστα ακόμη φορτία διατομής Μi και Qi. Συνεπώς, ο άμεσος υπολογισμός της Ν1k από μία και μόνο εξίσωση δεν είναι έτσι δυνατός. Προτιμότερη είναι εδώ η εξής πορεία: Με τη βοήθεια της διαχωριστικής τομής ΙIΙ υπολογίζεται σε ένα πρώτο βήμα η τέμνουσα Q15 στο αριστερό άκρο 1 του στοιχείου 1-5. Ο υπολογισμός της Q15 γίνεται άμεσα από τη συνθήκη ισορροπίας ροπών ως προς το δεξιό άκρο 5 του στοιχείου 1-5. Κατόπιν, με τη βοήθεια της τομής ΙV υπολογίζεται η Ν1k από τη συνθήκη ισορροπίας ροπών ως προς το σημείο 3. Με τον τρόπο αυτόν αποφεύγεται η επίλυση συστήματος γραμμικών εξισώσεων.
6-17
Σ T
A Τ
Ι Κ Η
Ι

Κεφάλαιο 6. Υπολογισμός εντασιακών μεγεθών ισοστατικών φορέων
Φόρτιση (α) Φόρτιση (β)
3
1
5ZX
2 3 4
F
k
ράβδος(M, Q=0, N=0)
1
F
k
A Z1
AΧ1
A Z5Ν15
I
IIaIIb
5
3
IIa
1
5
2 3 4
Fk
δοκός(M, Q, N=0)
1
5F
k
I
AZ1
AΧ1 AZ5(M,Q,N)i
i
Q15
Q51
N5k
IV
III
Υπολογισμός αντιδράσεων Υπολογισμός αντιδράσεων
( )
( ) .....A0M
.....A0F
.....A0M:
Z15
X1X
Z51
=⇒=
=⇒=
=⇒=
∑∑∑Ι Τομή
( )
( ) .....A0M
.....A0F
.....A0M:Ι Τομή
Z15
X1X
Z51
=⇒=
=⇒=
=⇒=
∑∑∑
Υπολογισμός της Ν15 Υπολογισμός της Ν15
( )
( ) .....N0M:
.....Ν0M:
153
15
=⇒=
=⇒=
∑
∑
ΙΙb Τομή
ή
IΙa Τομή 3
( )
( )
( )
( ) .....N0M:IV ομή
.....Q:IIΙ ομή
1k3
15
=⇒=
=⇒=
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛==⇒=
Τ
Τ
∑∑
∑
0M
M ,Q,A,ANΝ0M
5-1 δοκού της i σημείο
άγνωστες 2iiZ1X11ki
5
αριστ3,
IΙa Τομή
321f
:
(α) (β)
Σχ. 6.2.1-6 Παράδειγμα (επίπεδο πλαίσιο) 'έξυπνης' επιλογής διαχωριστικών τομών
6-18
Σ T
A Τ
Ι Κ Η
Ι

ΣΤΑΤΙΚΗ ΤΩΝ ΚΑΤΑΣΚΕΥΩΝ - Τόμος Ι - Θεμελιώδεις αρχές και ισοστατικοί φορείς
Ένα ακόμη παράδειγμα 'έξυπνης' επιλογής διαχωριστικών τομών προκειμένου το εκάστοτε ζητούμενο φορτίο διατομής να προκύπτει από μία μόνο εξίσωση δίνεται στο σχήμα 6.2.1-7(α). Ο φορέας είναι ένα ισοστατικό δικτύωμα και τα μόνα φορτία διατομής είναι (εξ ορισμού) οι αξονικές δυνάμεις των ράβδων του. Με τις σημειούμενες στο σχήμα 6.2.1-7(β) διαχωριστικές τομές και με κατάστρωση των συνθηκών ισορροπίας ροπών ως προς κατάλληλα επιλεγμένα σημεία επιτυγχάνεται ο υπολογισμός των αξονικών δυνάμεων του δικτυώματος χωρίς να χρειαστεί η επίλυση ενός συστήματος γραμμικών εξισώσεων.
(α)
(β)
∏
FZ FZ FZ FX
2
1
543
678
9
10
( )
( )
( )
( )
( ) .....N0M
.....N0M
IIIa :ΙIIb Τομή
.....N0F
.....N0F
:IΙ Τομή
.....A0F
.....A0M
.....A0M
:Ι Τομή
784
457
67X
56Z
X1X
Z110
Z61
=⇒=
=⇒=
↔
=⇒=
=⇒=
=⇒=
=⇒=
=⇒=
∑∑
∑∑
∑∑∑
AZ1
AX1
AZ6
I
II
IIIb
IIIa
∏10
4
7
1
N78N47
N45
N67
N56
.....N0F 47Z =⇒=∑
Σχ. 6.2.1-7 Παράδειγμα (επίπεδο δικτύωμα) 'έξυπνης' επιλογής διαχωριστικών τομών
6-19
Σ T
A Τ
Ι Κ Η
Ι

Κεφάλαιο 6. Υπολογισμός εντασιακών μεγεθών ισοστατικών φορέων
………………………. …………………………
Οι σελίδες 6-20 έως 6-50 παραλείπονται. ………………………. …………………………
6-20
Σ T
A Τ
Ι Κ Η
Ι

ΣΤΑΤΙΚΗ ΤΩΝ ΚΑΤΑΣΚΕΥΩΝ - Τόμος Ι - Θεμελιώδεις αρχές και ισοστατικοί φορείς
6.5 Τα διαγράμματα των φορτίων διατομής
6.5.1 Υπενθύμιση ορισμών και συμβάσεων Στις προηγούμενες παραγράφους 6.2 και 6.4 παρουσιάστηκαν οι δύο θεμελιώδεις μέθοδοι υπολογισμού εντασιακών μεγεθών: Η μέθοδος των διαχωριστικών τομών (που βασίζεται στις συνθήκες ισορροπίας σε συνδυασμό με την αρχή της αποδέσμευσης του Lagrange) και η κινηματική μέθοδος (που βασίζεται στην αρχή των δυνατών έργων). Εντούτοις, όπως σημειώθηκε ήδη στην παράγραφο 3.2.6-Ε, ο υπολογισμός των φορτίων διατομής σε μεμονωμένα σημεία ενός φορέα που επιτυγχάνεται με τις παραπάνω μεθόδους δεν αρκεί συνήθως για τον σχηματισμό μιας ολοκληρωμένης εικόνας σχετικά με τη συνολική επιπόνησή του. Προς τούτο απαιτείται η γνώση της διακύμανσης των φορτίων διατομής καθ' όλο το μήκος των δομικών στοιχείων ενός φορέα, δηλαδή απαιτείται ο υπολογισμός και η σχεδίαση των διαγραμμάτων των φορτίων διατομής.
Υπενθυμίζεται ότι το διάγραμμα του φορτίου διατομής S(x) για μια συγκεκριμένη εξωτερική φόρτιση είναι η συνάρτηση που για τη φόρτιση αυτή δίνει το μέγεθος ενός φορτίου διατομής S κατά μήκος των τοπικών αξόνων x των δομικών στοιχείων του φορέα. Οι χωρικοί φορείς απαιτούν για τον πλήρη καθορισμό της εντασιακής τους κατάστασης έξι διαγράμματα, ένα για κάθε φορτίο διατομής Ν(x), Qy(x), Qz(x), Mx(x), My(x) και Mz(x). Σε επίπεδους φορείς μέσα στο επίπεδο X-Z, οι οποίοι φορτίζονται από συνεπίπεδα με αυτούς φορτία, αρκούν τρία μόνον διαγράμματα: το διάγραμμα της αξονικής δύναμης Ν(x), το διάγραμμα της τέμνουσας δύναμης Q(x)=Qz(x) και το διάγραμμα των ροπών κάμψης Μ(x)=My(x). Κάθε διάγραμμα ενός φορτίου διατομής καθορίζεται από το μέγεθος και το πρόσημο των τεταγμένων του. Για μία ενιαία σχεδίαση των διαγραμμάτων τηρούμε την εξής σύμβαση:
Σύμβαση σχεδίασης διαγραμμάτων Θετικές τιμές των ροπών κάμψης σχεδιάζονται υπό κλίμακα προς την πλευρά της ίνας αναφοράς, δηλαδή προς την πλευρά που δείχνει ο τοπικός άξονας z σε κάθε δομικό στοιχείο. Αρνητικές τιμές σχεδιάζονται προς την αντίθετη πλευρά. Για τις τέμνουσες και τις αξονικές ισχύει το ακριβώς αντίστροφο.
Τέλος, επισημαίνεται ότι άρρηκτα συνδεδεμένοι με τον υπολογισμό των διαγραμμάτων των φορτίων διατομής είναι οι ορισμοί των τοπικών συστημάτων αναφοράς, των συμβατικά θετικών φορών των φορτίων διατομής και της ίνας αναφοράς (βλ. παράγρ. 3.2.6-Β2, -Β3).
6-51
Σ T
A Τ
Ι Κ Η
Ι

Κεφάλαιο 6. Υπολογισμός εντασιακών μεγεθών ισοστατικών φορέων
6.5.2 Ιδιότητες των διαγραμμάτων των φορτίων διατομής Το διάγραμμα S(x) ενός φορτίου διατομής S για μια δεδομένη φόρτιση του φορέα μπορεί επί της αρχής να υπολογιστεί και να σχεδιαστεί με επαναλαμβανόμενη εφαρμογή των δύο θεμελιωδών μεθόδων υπολογισμού εντασιακών μεγεθών (της μεθόδου των διαχωριστικών τομών και της κινηματικής μεθόδου) για περισσότερα σημεία (διατομές) του φορέα. Κατά κανόνα όμως περιοριζόμαστε στον υπολογισμό των τεταγμένων Si σε συγκεκριμένα μόνο χαρακτηριστικά σημεία i του φορέα. Συνήθως, τα σημεία i επιλέγονται έτσι ώστε μεταξύ δύο διαδοχικών σημείων ο φορέας να είναι ευθύγραμμος. H διακύμανση του S, δηλαδή οι τιμές που παίρνει το φορτίο διατομής S μεταξύ των παραπάνω χαρακτηριστικών σημείων, προσδιορίζεται (όπως ήδη σημειώθηκε στο τέλος της παραγράφου 3.2.6-Ε) χωρίς ιδιαίτερους υπολογισμούς βάσει των συναρτησιακών ιδιοτήτων των φορτίων διατομής S(x), όπως αυτές προκύπτουν από τις διαφορικές εξισώσεις που διέπουν την ισορροπία του δομικού στοιχείου.
Οι διαφορικές εξισώσεις ισορροπίας ενός γραμμικού στοιχείου αναπτύχθηκαν στην παράγραφο 3.2.10. Υπενθυμίζεται ότι για τη συνήθη περίπτωση επίπεδων φορέων με φόρτιση εντός του επιπέδου τους και μηδενικό συνεχές φορτίο ροπών m(x)=my(x)=0, δηλαδή μόνο συνεχή φορτία n(x)=qx(x) και q(x)=qz(x), και μοναχικά φορτία Px, Pz, MLy, οι διαφορικές εξισώσεις ισορροπίας για τα τρία φορτία διατομής Ν(x), Q(x)=Qz(x), Μ(x)=Μy(x) παίρνουν τη ακόλουθη μορφή (χάριν απλούστευσης παραλείπεται η μεταβλητή x):
QMqQnN =′−=′−=′ (6.5.2-1)
Σύμφωνα με τους κανόνες του διαφορικού λογισμού που διέπουν την παραγώγιση συναρτήσεων, από τις διαφορικές αυτές εξισώσεις προκύπτει για τα διαγράμματα των φορτίων διατομής επίπεδων ευθύγραμμων φορέων μία ολόκληρη σειρά ιδιοτήτων, οι βασικότερες των οποίων είναι οι εξής (βλ. παρακάτω πίνακες 6.5.2-1, -2 και -3):
1. Η αξονική δύναμη είναι ανεξάρτητη από την τέμνουσα και τη ροπή και αντιστρόφως (αποσύζευξη κάμψης-διάτασης).
2. α) Σε τμήματα του φορέα όπου το συνεχές φορτίο n / q είναι μηδενικό, η Ν / Q διατηρεί την τιμή της σταθερή (μηδενική ή διάφορη του μηδενός) και σε τμήματα όπου η τέμνουσα Q είναι μηδενική, η ροπή Μ είναι σταθερή (μηδενική ή διάφορη του μηδενός).
β) Σε τμήματα του φορέα όπου το συνεχές φορτίο n / q είναι μη μηδενικό και σταθερό (ομοιόμορφο), η Ν / Q μεταβάλλεται γραμμικά και σε τμήματα όπου η τέμνουσα Q είναι μη μηδενική και σταθερή, η ροπή Μ μεταβάλλεται γραμμικά.
γ) Σε τμήματα του φορέα όπου το συνεχές φορτίο n / q είναι γραμμικά μεταβαλλόμενο με αυξανόμενη κατά +x ένταση, η Ν / Q μεταβάλλεται παραβολοειδώς (παραβολή 2ου βαθμού) και σε τμήματα όπου η τέμνουσα
6-52
Σ T
A Τ
Ι Κ Η
Ι

ΣΤΑΤΙΚΗ ΤΩΝ ΚΑΤΑΣΚΕΥΩΝ - Τόμος Ι - Θεμελιώδεις αρχές και ισοστατικοί φορείς
Q είναι γραμμικά μεταβαλλόμενη, η ροπή Μ μεταβάλλεται παραβολοειδώς (παραβολή 2ου βαθμού).
δ) Σε τμήματα του φορέα όπου η τέμνουσα Q είναι παραβολή 2ου βαθμού, η ροπή Μ είναι παραβολή 3ου βαθμού.
ε) Γενικότερα, όσον αφορά στην εγκάρσια φόρτιση q(x), η τέμνουσα Q(x) είναι πάντα κατά έναν βαθμό και η ροπή Μ(x) κατά δύο βαθμούς ανώτερες της q(x).
3. α) Σε τμήματα του φορέα όπου τα συνεχή φορτία n και q είναι θετικά / αρνητικά, το φορτίο διατομής Ν / Q βαίνει μειούμενο / αυξανόμενο.
β) Σε τμήματα του φορέα όπου η τέμνουσα δύναμη Q έχει θετικές / αρνητικές τιμές, η ροπή κάμψης βαίνει αυξανόμενη / μειούμενη.
4. Στα σημεία όπου το φορτίο n / q διέρχεται διά του μηδενός (μηδενίζεται), η Ν / Q παίρνει την ακραία (μέγιστη, ελάχιστη) τιμή της και στα σημεία όπου η τέμνουσα Q διέρχεται διά του μηδενός (μηδενίζεται), η ροπή M παίρνει την ακραία (μέγιστη, ελάχιστη) τιμή της. Στα σημεία των ακραίων τιμών Ν / Q / M η εφαπτομένη στο αντίστοιχο διάγραμμα είναι παράλληλη με τον άξονα x του στοιχείου.
5. Στα σημεία όπου το φορτίο n / q εμφανίζει άλμα, το διάγραμμα της Ν / Q εμφανίζει γόνατο και στα σημεία όπου η τέμνουσα Q εμφανίζει άλμα, η ροπή Μ εμφανίζει γόνατο. Στα σημεία όπου η τέμνουσα Q εμφανίζει γόνατο, το διάγραμμα της ροπής εμφανίζει σημείο καμπής (αλλαγή καμπυλότητας).
6. Ένα ευθύγραμμο και αφόρτιστο τμήμα ενός φορέα μεταξύ δύο αρθρώσεων έχει μηδενικές ροπές, μηδενικές τέμνουσες και σταθερή αξονική δύναμη. [Σημ.: Τέτοια αφόρτιστα αμφιαρθρωτά ευθύγραμμα δομικά στοιχεία που μεταφέρουν μόνο αξονική δύναμη χαρακτηρίζονται συχνά ως ράβδοι (βλ. παράγρ. 2.3.1)].
Σε περίπτωση συγκεντρωμένων φορτίων Ηi (=Pxi), Vi (=Pzi), MLi (=MLyi) που ενεργούν στο σημείο (κόμβο) i ενός φορέα, στα διαγράμματα των φορτίων διατομής εμφανίζονται άλματα ή γόνατα. Σύμφωνα με όσα αναπτύχθηκαν στην υποπαράγραφο 3.2.10-Ε για τα μητρώα μεταβίβασης, η ισορροπία ενός τέτοιου σημείου i δίνεται από την εξίσωση ισορροπίας κόμβου:
iLiαiδM
V
H
M
Q
N
M
Q
N
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
=⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
(6.5.2-2)
όπου δείκτης iα / iδ χαρακτηρίζει την όχθη της τομής αριστερά / δεξιά του σημείου i. Για την περίπτωση που στις περιοχές εκατέρωθεν του θεωρούμενου σημείου i δεν δρουν συνεχή φορτία, τα διαγράμματα Ν(x), Q(x), M(x) για κάθε ένα μοναχικό φορτίο ξεχωριστά παίρνουν τις μορφές που απεικονίζονται στο ακόλουθο σχήμα 6.5.2-1 (βλ. επίσης τελευταίες στήλες των πινάκων 6.5.2-1, -2 και -3).
6-53
Σ T
A Τ
Ι Κ Η
Ι

Κεφάλαιο 6. Υπολογισμός εντασιακών μεγεθών ισοστατικών φορέων
δεν μεταβάλλεται δεν μεταβάλλεται
δεν μεταβάλλεταιδεν μεταβάλλεται
δεν μεταβάλλεται
Διάγραμμααξονικήςδύναμης Ν(x):
Διάγραμματέμνουσαςδύναμης Q(x):
Διάγραμμαροπήςκάμψης M(x):
Συγκεντρωμέναφορτία:
xz iα iδi
Px
iα iδi
Pz
iα iδi
ML
i i i
i i i
i
+ Niδ
Niα
+ Qiδ
Qiα
Px
Pz
i i
γόνατο+
Σχ. 6.5.2-1 Αρνητικά άλματα των Ν(x), Q(x), M(x) λόγω θετικών φορτίων PX, PZ, ML
Στις περιπτώσεις αυτές τα διαγράμματα έχουν συνεπώς τις εξής ιδιότητες (αρίθμηση σε συνέχεια της προηγούμενης):
7. Στο σημείο εφαρμογής μιας συγκεντρωμένης δύναμης Px που δρα κατά την έννοια του άξονα x, δηλαδή είναι θετική, το διάγραμμα της αξονικής δύναμης Ν(x) εμφανίζει αρνητικό άλμα ίσο με την τιμή της Px.
8. Στο σημείο εφαρμογής μιας συγκεντρωμένης δύναμης Pz που δρα κατά την έννοια του άξονα z, δηλαδή είναι θετική, το διάγραμμα της τέμνουσας δύναμης Q(x) εμφανίζει αρνητικό άλμα ίσο με την τιμή της Pz και το διάγραμμα της ροπής Μ(x) εμφανίζει γόνατο. Οι δύο κλάδοι της Q(x) εκατέρωθεν του υπόψη σημείου είναι παράλληλοι (έχουν παράλληλες εφαπτομένες).
9. Στο σημείο εφαρμογής μιας συγκεντρωμένης ροπής ΜL που δρα κατά την έννοια του άξονα y, δηλαδή είναι θετική, το διάγραμμα της ροπής Μ(x) εμφανίζει αρνητικό άλμα ίσο με την τιμή της ΜL και οι δύο κλάδοι της ροπής Μ(x) εκατέρωθεν του υπόψη σημείου είναι παράλληλοι (έχουν παράλληλες εφαπτομένες).
Τα αρνητικά άλματα των παραπάνω περιπτώσεων 7, 8 και 9 γίνονται προφανώς θετικά, αν το αντίστοιχο φορτίο αλλάξει πρόσημο.
Χάριν καλύτερης εποπτείας, οι παραπάνω ιδιότητες των διαγραμμάτων τεμνουσών δυνάμεων και ροπών παρουσιάζονται γραφικά για ορισμένες συχνά παρουσιαζόμε-νες περιπτώσεις φόρτισης στους πίνακες 6.5.2-1 (για εγκάρσια φορτία), 6.5.2-2 (για αξονικά φορτία) και 6.5.2-3 (για φορτία καμπτικών ροπών).
6-54
Σ T
A Τ
Ι Κ Η
Ι

ΣΤΑΤΙΚΗ ΤΩΝ ΚΑΤΑΣΚΕΥΩΝ - Τόμος Ι - Θεμελιώδεις αρχές και ισοστατικοί φορείς
Πίνακας 6.5.2-1 Ιδιότητες διαγραμμάτων Q(x) και Μ(x) λόγω σταθερού / γραμμικώς μεταβαλλόμενου (τριγωνικού) / συγκεντρωμένου εγκάρσιου φορτίου
με αλλαγή προσή
μου
P 12P
θετική
κλίση
2P∏
1P
κλίση
αρνητική
+-
+-
-+
+-
α/2
xx
xx
Q=0
όχι γόνατα
Φορτίο
Εγκάρσιο
q, P
Q(x
)Διάγραμμα
Διάγραμμα
M(x
)
M(x
)Διάγραμμα
Διάγραμμα
Q(x
)
Κανένα
Σταθερό
Γραμμικό
Συγκεντρωμένο
q=0
σταθερό
με τιμή
πεπερασ
μένη
Q(x
)∫0
γραμμικό
Αν Q
(x)∫
0:
με τιμή
μηδενική
σταθερό
Q(x
)=0
σταθερό
ik
q=σταθ
.
α
γραμμικό
χωρίς αλλαγή
προσή
μου
sign
Q =
sig
nQi
k
σταθ
.σταθ
.
Qi
Qk
∏
∏
∏
∏γραμμ.
γραμμ.
Mi
Mk
παραβολή
2 βαθμού
ου(q
α 2
∏)/8
∏
με αλλαγή προσή
μου
σταθ
.∏
σταθ
.
γραμμικό
sign
Qi
sign
Qk
∫
Qi
kQ
∏
∏∏
Mi
kM
max
M
0x=Q
i/qm
axM
=M
+Q
ii
∏ x0
-q
0x∏2
0x
()/
2
ik
α
q τριγωνικά
αυξανόμενο
∏Q
Qk
i
σταθ
.∏
σταθ
.
χωρίς αλλαγή
προσή
μου
γόνατο
sign
Q =
sig
nQi
kόχι γόνατοπαραβολή
(οριζόντια
εφα
πτομένη
)
2 βαθμού
ου
γραμμ.
γραμμ.
ου 3 βαθμού
παραβολή
kM
iM
∏
∏
x 0
όχι γόνατα
∏
με αλλαγή προσή
μου
isi
gnQ
∫k
sign
Q
σταθ
.
σταθ
.Q
∏i
Q∏
k
2 βαθμού
ουπαραβολή
max
M =
=x 0
M
(∏ q
-0x∏
ii
Q+
M
iMm
axM
∏∏
(/)3 x 0k
6∏α)
iQ
2∏∏ α
()/
q
P
άλμα
P
χωρίς αλλαγή
προσή
μου
γραμμ.
γόνατο
∏
γραμμ.
P
άλμα
P
6-55
Σ T
A Τ
Ι Κ Η
Ι

Κεφάλαιο 6. Υπολογισμός εντασιακών μεγεθών ισοστατικών φορέων
Πίνακας 6.5.2-2 Ιδιότητες διαγραμμάτων N(x) λόγω σταθερού / γραμμικώς μεταβαλλόμενου (τριγωνικού) / συγκεντρωμένου αξονικού φορτίου
σταθ.
Φορτίο Κανένα Σταθερό Γραμμικό Συγκεντρωμένο
Αξονικόn, H
σταθ.
n=σταθ.
α
γραμ.
σταθ.∏
∏
x
διάγραμμαN(x)
n=0
x
σταθ.
α
παραβολή
∏
∏
x
σταθ.
H
x
(n α)
nn(x)
(n α)0.5 άλμα
H
2 βαθμ.ου
Πίνακας 6.5.2-3 Ιδιότητες διαγραμμάτων Q(x) και Μ(x) λόγω σταθερού / γραμμικώς
μεταβαλλόμενου (τριγωνικού) / συγκεντρωμένου φορτίου καμπτικών ροπών
Φορτίο Κανένα Σταθερό Γραμμικό Συγκεντρωμένο
Ροπέςm, M
σταθ.
αx
διάγραμμαQ(x)
m
x αx
Μ
x
L=0mL=σταθ.
mL
γραμ.
διάγραμμαΜ(x)
(m α)0.5άλμα
Μ
L
σταθ. σταθ. σταθ.
γραμ.
L
L(m α)L
mL(x)
παραβολή2 βαθμ.ου
6-56
Σ T
A Τ
Ι Κ Η
Ι

ΣΤΑΤΙΚΗ ΤΩΝ ΚΑΤΑΣΚΕΥΩΝ - Τόμος Ι - Θεμελιώδεις αρχές και ισοστατικοί φορείς
Στο ακόλουθο απλό παράδειγμα μιας αμφιέρειστης δοκού (Σχ. 6.5.2-2) που φορτίζεται με ορισμένα από τα πλέον συνήθη φορτία q, H, V και ML φαίνονται μερικές από τις χαρακτηριστικές ιδιότητες των διαγραμμάτων των φορτίων διατομής:
α) Στα αφόρτιστα τμήματα του φορέα οι Ν(x) και Q(x) έχουν σταθερή (πεπερασμένη ή μηδενική) τιμή, ενώ η ροπή Μ(x) μεταβάλλεται γραμμικά.
β) Στην περιοχή a-b, όπου δρα το σταθερό εγκάρσιο φορτίο q, η τέμνουσα Q(x) μεταβάλλεται γραμμικά και η ροπή Μ(x) παραβολικά (παραβολή 2ου βαθμού).
γ) Στα σημεία a και b (αρχή και τέλος του συνεχούς φορτίου q) η τέμνουσα δύναμη Q(x) εμφανίζει γόνατα, όχι όμως και το διάγραμμα της ροπής Μ(x).
δ) Στο σημείο που μηδενίζεται η τέμνουσα Q(x) η ροπή Μ(x) εμφανίζει τη μέγιστη τιμή της. Στο σημείο αυτό η εφαπτομένη του διαγράμματος ροπών είναι οριζόντια (έχει μηδενική κλίση ως προς τον άξονα x).
ε) Στο σημείο c, όπου δρα το εγκάρσιο συγκεντρωμένο φορτίο V, η αξονική δύναμη Ν(x) δεν μεταβάλλεται, ενώ η τέμνουσα δύναμη Q(x) παρουσιάζει άλμα στην τιμή της ίσο με το μέγεθος του φορτίου V και η ροπή Μ(x) εμφανίζει γόνατο. στ) Στο σημείο d, όπου δρα το διαμήκες συγκεντρωμένο φορτίο Η, η αξονική
δύναμη Ν(x) παρουσιάζει άλμα στην τιμή της ίσο με το μέγεθος του φορτίου Η, ενώ τέμνουσα και ροπή μένουν ανεπηρέαστες.
ζ) Στο σημείο e, όπου δρα η εξωτερική ροπή ML, η αξονική και η τέμνουσα δύναμη μένουν ανεπηρέαστες, ενώ η ροπή Μ(x) παρουσιάζει άλμα στην τιμή της ίσο με το μέγεθος του φορτίου ML.
1 2
AZ1
AX1
XZ
a b c d e
q VH ML
AZ2
N(x) AX1 H+
Q(x) AZ1 +
M(x)+
AZ2V -
+
- ML
όχιγόνατο
γόνατοόχι γόνατο
όχι γόνατοπαραβολή2 βαθμ.ου οριζόντια
εφαπτομένη Σ χ. 6.5.2-2 Διαγράμματα φορτίων διατομής μιας αμφιέρεισης δοκού με συνήθη φορτία
6-57
Σ T
A Τ
Ι Κ Η
Ι

Κεφάλαιο 6. Υπολογισμός εντασιακών μεγεθών ισοστατικών φορέων
6.5.3 Υπολογισμός της μέγιστης/ελάχιστης τιμής της ροπής κάμψης Οι δομικοί φορείς μελετώνται και διαστασιολογούνται έτσι ώστε να μπορούν να υποστούν με ασφάλεια τις δυσμενέστερες εντάσεις που ενδέχεται να αναπτυχθούν στα διάφορα στοιχεία τους κατά τη διάρκεια ζωής της κατασκευής (Σημ.: Το ίδιο ισχύει βέβαια και για τις δυσμενέστερες μετακινήσεις και παραμορφώσεις, στις οποίες όμως θα γίνει αναφορά σε επόμενα κεφάλαια). Για τον λόγο αυτόν απαιτείται στην πράξη κατά κανόνα ο υπολογισμός των ακραίων (μέγιστων και ελάχιστων) τιμών extrS (maxS και minS) που εμφανίζουν τα φορτία διατομής S κάθε δομικού στοιχείου υπό την εκάστοτε θεωρούμενη φόρτιση. Ειδικότερα ενδιαφέρουν οι μέγιστες θετικές και οι ελάχιστες αρνητικές τιμές των φορτίων διατομής (Σημ.: Διότι αν minS>0, τότε η minS υπερκαλύπτεται από την maxS>0, και αντίστοιχα αν maxS<0, τότε η maxS υπερκαλύπτεται από την minS<0). Είναι προφανές ότι οι ακραίες αυτές τιμές δεν αναπτύσσονται πάντοτε στα άκρα των δομικών στοιχείων, αλλά μπορεί να εμφανιστούν και σε ενδιάμεσα σημεία. Στο σχήμα 6.5.3-1 παρατίθενται μερικές απλές περιπτώσεις φορέων/φόρτισης για τις οποίες σημειώνεται η θέση εμφάνισης και το πρόσημο των μέγιστων και ελάχιστων ροπών κάμψης.
q q
q
maxM=0
-
minM<0 +
minM=0 minM=0maxM>0
cba 21
- -minM1<0 minM2<0
maxMc=0+
maxMa=0 maxMb>0
- -maxMb<0
ή[σε εξάρτηση από τομήκος των προβόλων]
Σχ. 6.5.3-1 Θέση και πρόσημο μέγιστων/ελάχιστων ροπών κάμψης σε απλούς φορείς
Στα ακόλουθα δύο σχήματα 6.5.3-2 και 6.5.3-3 αναπτύσσονται οι τύποι που δίνουν τη θέση x0 και το μέγεθος maxM της μέγιστης ροπής σε ένα ευθύγραμμο τμήμα δοκού που φορτίζεται με σταθερό ή τριγωνικό συνεχές φορτίο. Προϋπόθεση βέβαια για την εμφάνιση της maxM στο φορτιζόμενο τμήμα i-k της δοκού αποτελεί η διέλευση της τέμνουσας διά του μηδενός (δηλαδή η αλλαγή του προσήμου της) μεταξύ των δύο αυτών σημείων. Αν δεν συμβαίνει αυτό, η μέγιστη ροπή δεν εμφανίζεται μεταξύ των σημείων i και k, το διάγραμμα Μ(x) όμως διατηρεί κατά τα λοιπά ακριβώς τα ίδια γεωμετρικά χαρακτηριστικά. Οι περιπτώσεις αυτές περιλαμβάνονται στο κάτω τμήμα του πίνακα 6.5.2-1.
6-58
Σ T
A Τ
Ι Κ Η
Ι

ΣΤΑΤΙΚΗ ΤΩΝ ΚΑΤΑΣΚΕΥΩΝ - Τόμος Ι - Θεμελιώδεις αρχές και ισοστατικοί φορείς
maxM
q
α
ki
q
QkQi
Mi Mk
x0
+
- -
Qi
Qk
+
-
Mk
Mi οριζόντιαεφαπτομένη
i, k: χαρακτηριστικά σημεία i, kστα οποία έχουν υπολογιστείοι τιμές της τέμνουσας και της ροπής κάμψης.
Έστω ότι η τέμνουσααλλάζει πρόσημομεταξύ των σημείων i και k.
qQ 0Qi
Mi maxMx0
(x )=0
Παράδειγμα:
q
L
ki
XZ
0x =Qi /q
maxM = M + Qii ∏x 0 - q 0x∏ 2 /2
ΣPZ =0 ‡ +Qi q 0x∏ =0-
‡
ΣM(x =0 ‡
0)
0x =Qiq
=Qi q L∏( ) / 2=A Zi
=q L∏2 q∏ = L
2
maxM =L/220 +
q L∏2
∏L2 - q ∏
( )2 q L∏8=
2
Υπολογισμός maxM:
Σχ. 6.5.3-2 Μέγιστη ροπή κάμψης υπό ομοιόμορφο φορτίο q
6-59
Σ T
A Τ
Ι Κ Η
Ι

Κεφάλαιο 6. Υπολογισμός εντασιακών μεγεθών ισοστατικών φορέων
Q 0Qi
Mi maxM(x )=0
Παράδειγμα:
L
ki
XZ
Qi=AZi
‡‡
‡
ΣPZ =0 +Qi =0-
ΣM(x =00)
0x =2 (q∏
q = L3
maxM =L/
0 +q L∏
6∏ - q ∏
( )3
Υπολογισμός maxM:
q
Qi
Qk
+
-Έστω ότι η τέμνουσααλλάζει πρόσημομεταξύ των σημείων i και k.
οριζόντιαεφαπτομένη (όχι γόνατο)
όχιγόνατο
x0
qα x∏ 0
q
q x∏ 20
2 α∏
maxM =
=x0
( ∏q-0x∏i iQ+M (/)3x0 6 ∏α)
iQ2∏ ∏α( ) /q
∏L)/6 ∏L22
0L‡ x =3
L3 6 ∏L
3=
q L∏9 3
2
∏
ΣM(k)=0 Qi =L∏ -q
‡
L∏2
∏L3
q L∏6= 0 Qi‡
maxM
οριζόντιαεφαπτομένη
i, k: χαρακτηριστικά σημείαστα οποία έχουν υπολογιστείοι τιμές της τέμνουσας και της ροπής κάμψης.
ki
α
q
QkQi
Mi Mk
x0
+- -
MkMi
Σχ. 6.5.3-3 Μέγιστη ροπή κάμψης υπό αυξανόμενο τριγωνικό φορτίο q(x)
6-60
Σ T
A Τ
Ι Κ Η
Ι

ΣΤΑΤΙΚΗ ΤΩΝ ΚΑΤΑΣΚΕΥΩΝ - Τόμος Ι - Θεμελιώδεις αρχές και ισοστατικοί φορείς
6.5.4 Η ομόλογη δοκός Η επίλυση ενός φορέα που φέρει το τυχόν φορτίο q(x) μεταξύ των σημείων i και k είναι συχνά βολικότερη, αν προηγουμένως γίνει επίσαξη ("σαμάρωμα") του φορέα με μία αμφιέρειστη δοκό που φέρει το δεδομένο φορτίο q(x). Η αμφιέρειστη αυτή δοκός i-k, της οποίας οι αντιδράσεις στήριξης (ορθότερα: δυνάμεις έδρασης) φορτίζουν τον αρχικό φορέα [και τώρα πλέον επισαγματωμένο ("σαμαρωμένο") φορέα], χαρακτηρίζεται ως ομόλογη δοκός. Η περίπτωση επίσαξης ενός εγκάρσιου ομοιόμορφου συνεχούς φορτίου q εικονογραφείται στο σχήμα 6.5.4-1. Ο αρχικός φορέας επιλύεται καταρχάς με φορτία τις (γενικώς τρεις) δυνάμεις έδρασης της ομόλογης δοκού αντί με το δεδομένο φορτίο q(x), με ό,τι αυτό συνεπάγεται σε ευκολία αριθμητικών πράξεων. Στα προκύπτοντα φορτία διατομής Μσαγμ(x), Qσαγμ(x), Nσαγμ(x) του επισαγματωμένου φορέα επαλληλίζουμε (προσθέτουμε) στη συνέχεια τα φορτία διατομής Μομολ(x), Qομολ(x), Nομολ(x) της ομόλογης δοκού i-k λόγω q(x). Τα τελευταία υπολογίζονται γενικώς εύκολα, αφού πρόκειται για μία απλή αμφιέρειστη δοκό. Η επαλληλία των δύο ομάδων φορτίων διατομής Sσαγμ(x) και Sομολ(x) μας δίνει τα ζητούμενα φορτία διατομής S(x) του αρχικού φορέα λόγω q(x):
( ) ( ) ( )xSxSxS ομολσαγμ += (6.5.4-1)
[ ]N Q, M,Sμε =
Εφόσον τα φορτία διατομής Sομολ(x) αφορούν μόνο στην ομόλογη δοκό i-k, για τον υπόλοιπο φορέα ισχύει προφανώς S(x) = Sσαγμ(x). Παρατηρούμε ότι τα τελικά διαγράμματα Q(x) και M(x) στο φορτιζόμενο τμήμα i-k προκύπτουν με "κρέμασμα" (ανάρτηση, πρόσθεση, επαλληλία) των διαγραμμάτων Qομολ(x) και Μομολ(x) της ομόλογης δοκού στην "κλείουσα", δηλαδή στο διάγραμμα Qσαγμ(x) και Μσαγμ(x) του τμήματος i-k του επισαγματωμένου φορέα αντιστοίχως. Σημειώνεται ότι είναι αδιάφορο για το τελικό αποτέλεσμα αν η σταθερή έδραση της ομόλογης δοκού ληφθεί στο αριστερό ή στο δεξιό της άκρο ακόμη και στη γενική περίπτωση που η ομόλογη δοκός φορτίζεται με αξονικά φορτία n(x).
6.5.5 Παραδείγματα Πολλά παραδείγματα υπολογισμού και σχεδίασης διαγραμμάτων φορτίων διατομής για διάφορους τύπους ισοστατικών φορέων υπό ποικιλία φορτίσεων περιέχονται στο επόμενο κεφάλαιο 7 καθώς και στον τόμο των ασκήσεων ([Αβρ-Ια], σειρές ασκήσεων Η και Θ), όπου και παραπέμπεται ο αναγνώστης.
6-61
Σ T
A Τ
Ι Κ Η
Ι

Κεφάλαιο 6. Υπολογισμός εντασιακών μεγεθών ισοστατικών φορέων
i k
L
qφορτιζόμενο με q τμήμα τουδεδομένου φορέα
A BBA
αντιδράσεις
ομόλογη δοκός
ομόλογης δοκού
επί του δεδομένου φορέαδυνάμεις έδρασης ομόλογης δοκού
(επίσαξη)
q
-+A
BL/2
+
)/8∏ 2(q L
Qομολ(x) ομόλογης δοκού
ομόλογης δοκούΜομολ(x)
A
Β
iQ+
-
ΔQ kQ
(κλείουσα)σαγμ.Q
(ευθεία)
Περιοχή φορτίου (μεταξύ i και k):
Q(x) = (x)Qσαγμ. + (x)ομολQ
maxM
MkiM
+
(κλείουσα)σαγμ.M
Mk= iML = ΔQ
(συμπληρωματικήτέμνουσα)
Q(x) =
Υπόλοιπος φορέας:
Q (x)σαγμ.σαγμ.M
Qσαγμ.
(x) 0][Q ομολ ª
)/82∏(q L
(ευθεία)
Σχ. 6.5.4-1 Ομόλογη δοκός - Επίσαξη ομοιόμορφου συνεχούς φορτίου q
6-62
Σ T
A Τ
Ι Κ Η
Ι