




γλώσσες
Σελίδες
Νομικός

An Introduction to Time Series
Ginger Davis
VIGRE Computational Finance Seminar Rice University
November 26, 2003
What is a Time Series?
• Time Series– Collection of observations
indexed by the date of each observation
• Lag Operator– Represented by the symbol L
• Mean of Yt = μt
Tyyy ,,, 21
1 tt xLx
White Noise Process
• Basic building block for time series processes
0
022
t
t
t
tt
E
E
E
White Noise Processes, cont.
• Independent White Noise Process– Slightly stronger condition that and are
independent
• Gaussian White Noise Process
2,0~ Nt
t
Autocovariance
• Covariance of Yt with its own lagged value
• Example: Calculate autocovariances for:
jtjtttjt YYE
jttjttjt
tt
EYYE
Y
Stationarity
• Covariance-stationary or weakly stationary process– Neither the mean nor the autocovariances depend on
the date t
jjtt
t
YYE
YE
Stationarity, cont.
• 2 processes– 1 covariance stationary, 1 not covariance
stationary
tt
tt
tY
Y

Stationarity, cont.
• Covariance stationary processes– Covariance between Yt and Yt-j depends only on
j (length of time separating the observations) and not on t (date of the observation)
jj
Stationarity, cont.
• Strict stationarity– For any values of j1, j2, …, jn, the joint
distribution of (Yt, Yt+j1, Yt+j2
, ..., Yt+jn) depends
only on the intervals separating the dates and not on the date itself
Gaussian Processes
• Gaussian process {Yt}– Joint density
is Gaussian for any
• What can be said about a covariance stationary Gaussian process?
nnjtjt jtjttYYY yyyf
,,,111 ,,,
njjj ,,, 21
Ergodicity
• A covariance-stationary process is said to be ergodic for the mean if
converges in probability to E(Yt) as
T
tty
Ty
1
1
T
Describing the dynamics of a Time Series
• Moving Average (MA) processes
• Autoregressive (AR) processes
• Autoregressive / Moving Average (ARMA) processes
• Autoregressive conditional heteroscedastic (ARCH) processes
Moving Average Processes
• MA(1): First Order MA process
• “moving average”– Yt is constructed from a weighted sum of the two
most recent values of .
1 tttY
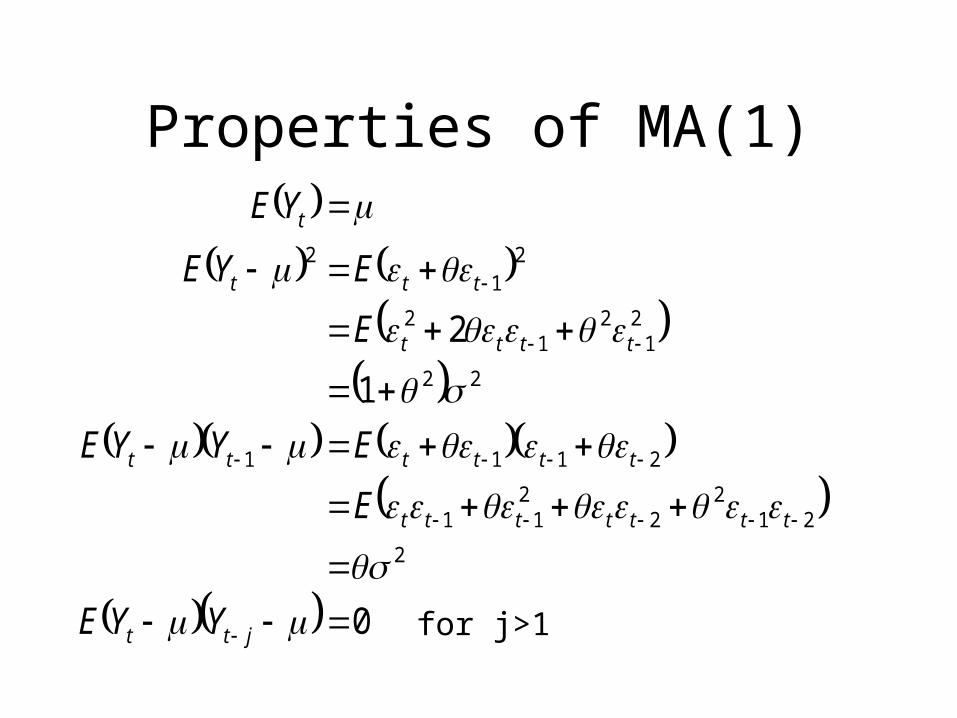
Properties of MA(1)
0
1
2
2
212
22
11
2111
22
21
21
2
21
2
jtt
ttttttt
tttttt
tttt
ttt
t
YYE
E
EYYE
E
EYE
YE
for j>1
MA(1)
• Covariance stationary– Mean and autocovariances are not functions of time
• Autocorrelation of a covariance-stationary process
• MA(1)0
j
j
222
2
1 11
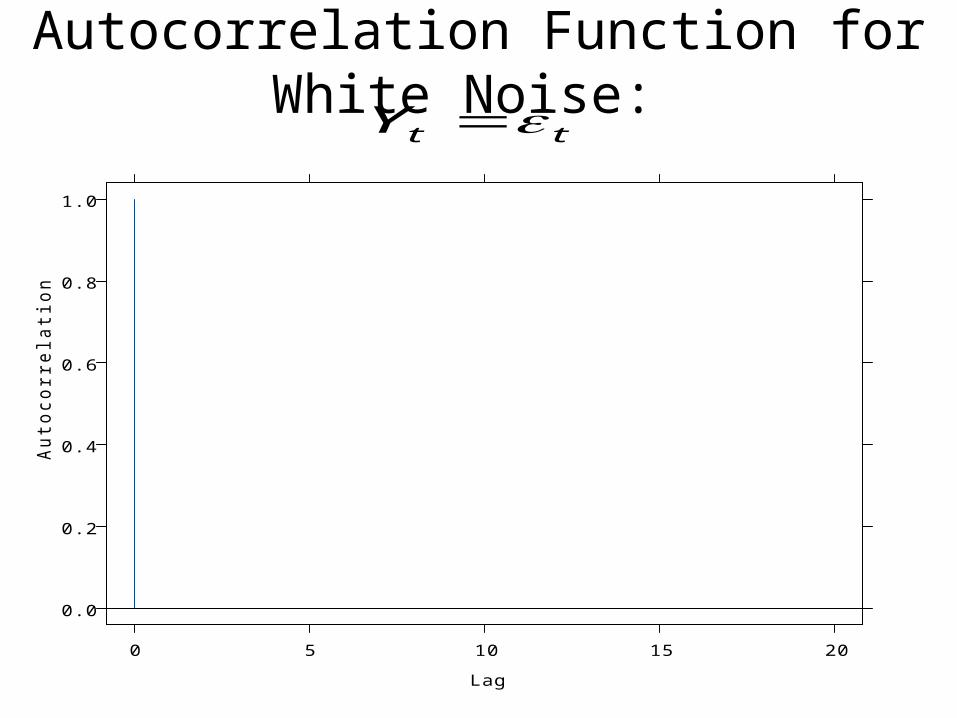
Autocorrelation Function for White Noise:
0.0
0.2
0.4
0.6
0.8
1.0
0 5 10 15 20
Lag
Autocorrelation
ttY
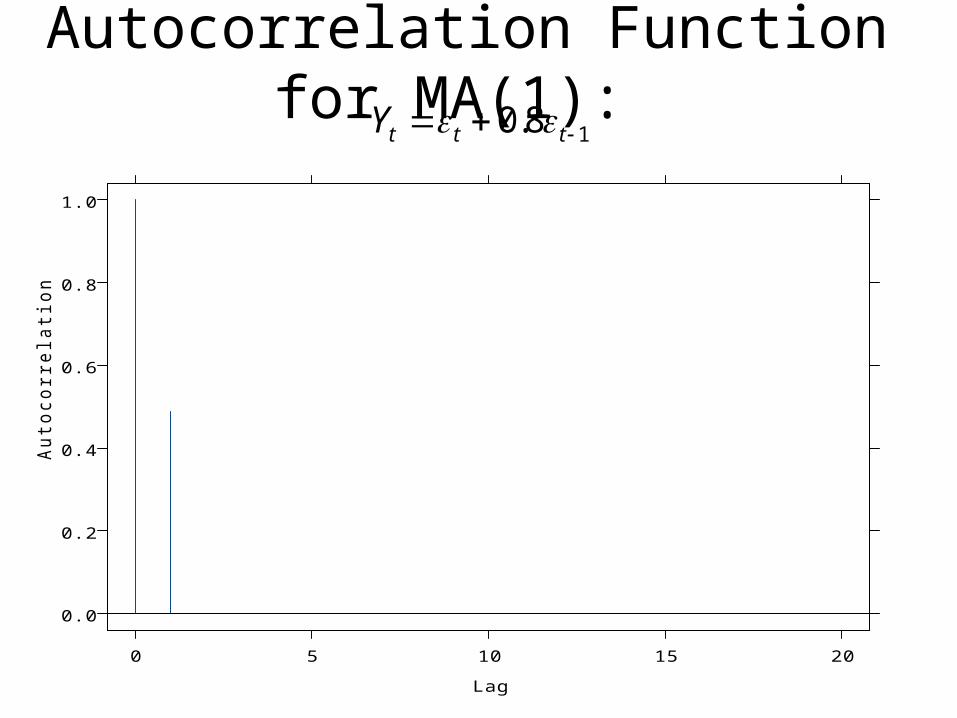
Autocorrelation Function for MA(1): 18.0 tttY
0.0
0.2
0.4
0.6
0.8
1.0
0 5 10 15 20
Lag
Autocorrelation
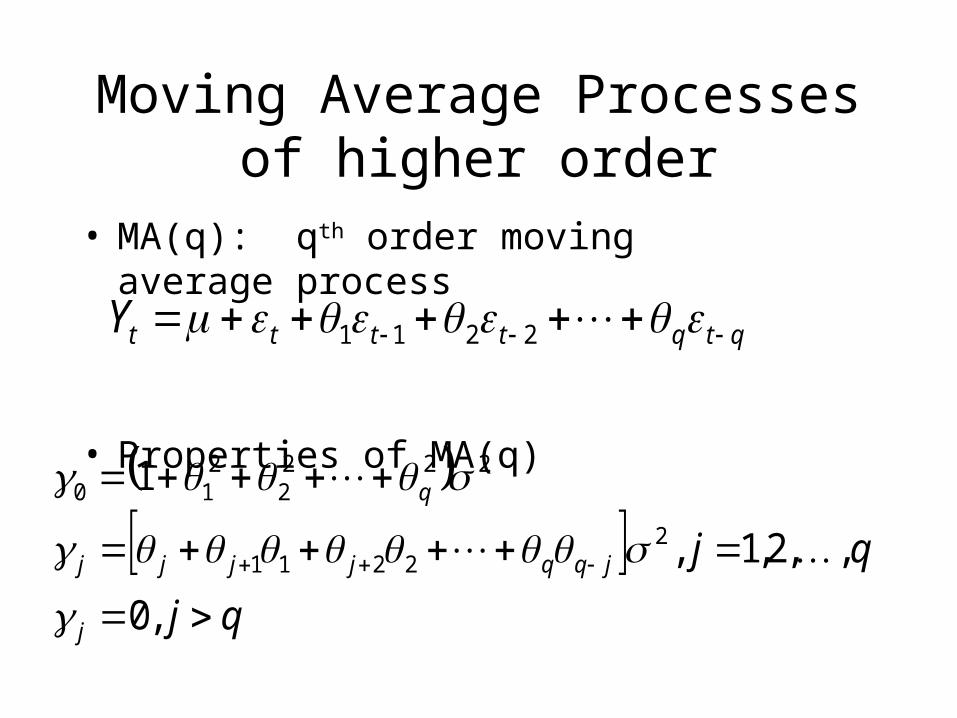
Moving Average Processesof higher order
• MA(q): qth order moving average process
• Properties of MA(q)
qtqttttY 2211
qj
qj
j
jqqjjjj
q
,0
,,2,1,
12
2211
2222
210

Autoregressive Processes
• AR(1): First order autoregression
• Stationarity: We will assume• Can represent as an MA
ttt YcY 1
1
22
1
22
1
1 ttt
tttt
c
cccY
:)(
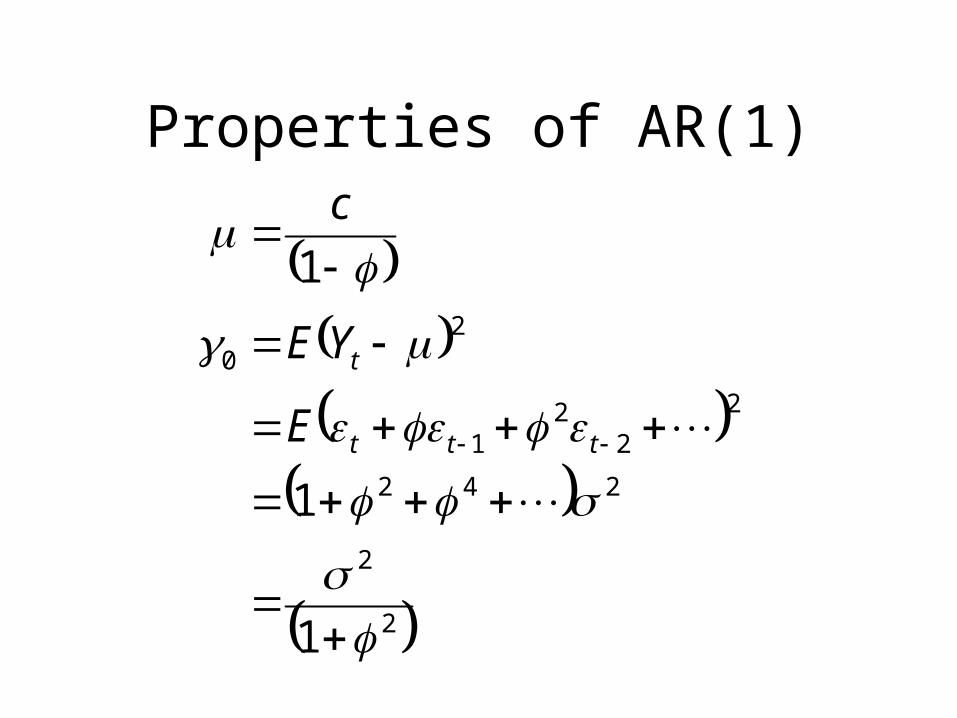
Properties of AR(1)
2
2
242
2
22
1
20
1
1
1
ttt
t
E
YE
c

Properties of AR(1), cont.
jj
j
j
j
jjj
jtjtjtjtj
ttt
jttj
E
YYE
0
22
242
242
22
122
1
1
1
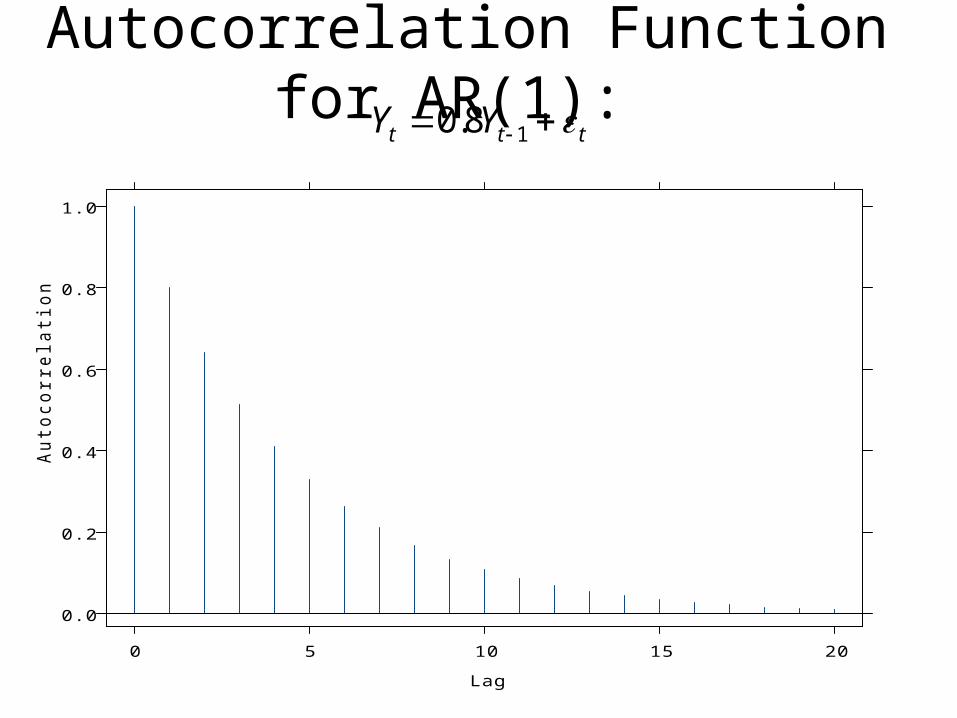
Autocorrelation Function for AR(1): ttt YY 18.0
0.0
0.2
0.4
0.6
0.8
1.0
0 5 10 15 20
Lag
Autocorrelation
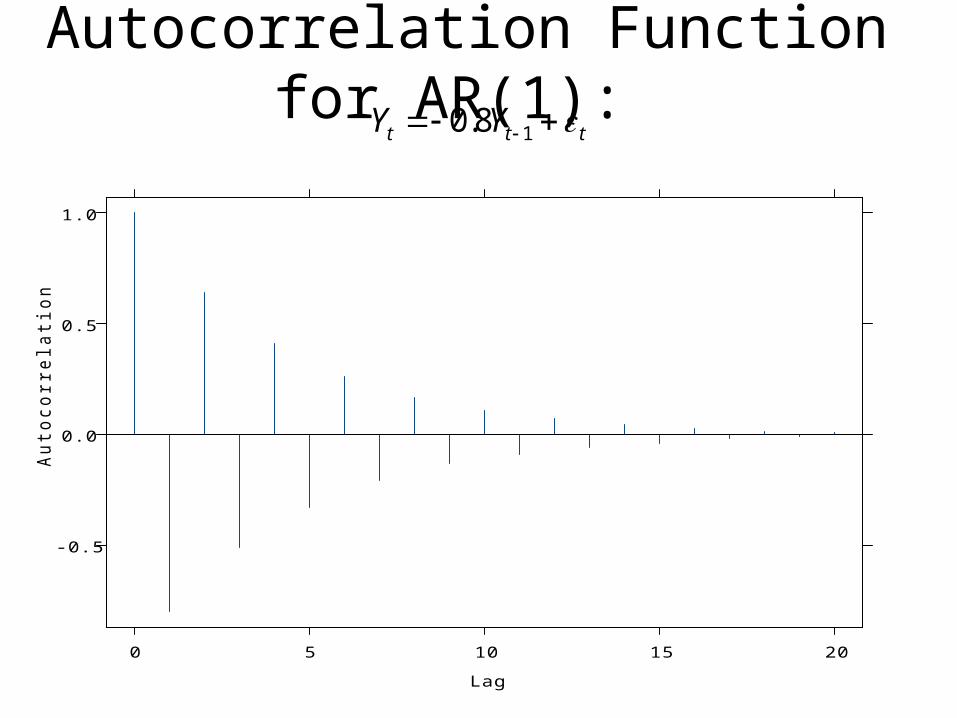
Autocorrelation Function for AR(1): ttt YY 18.0
-0.5
0.0
0.5
1.0
0 5 10 15 20
Lag
Autocorrelation
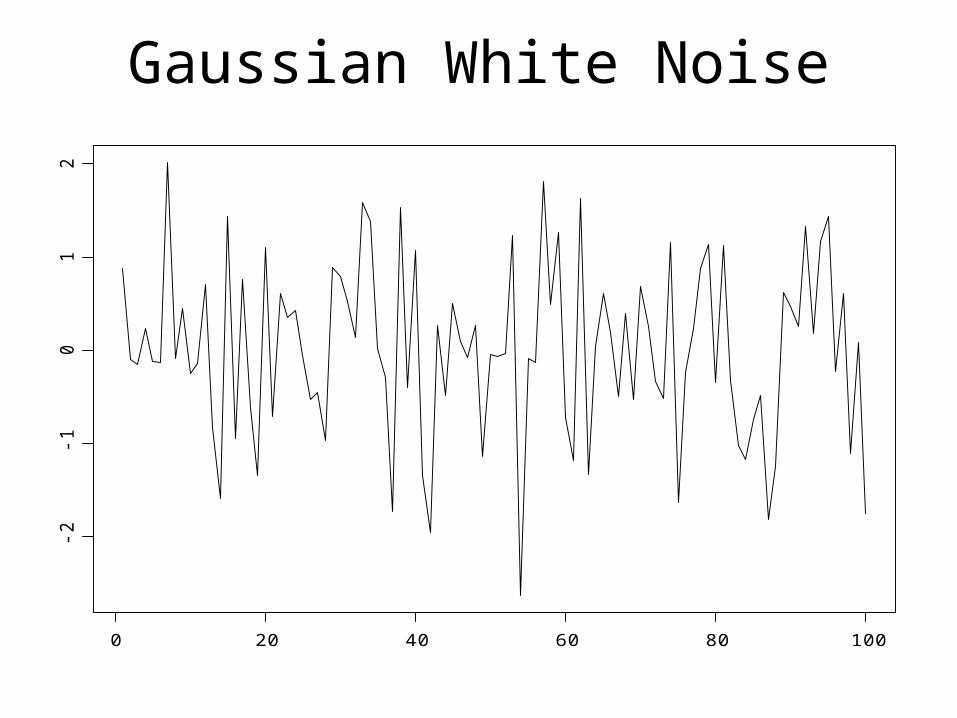
Gaussian White Noise
0 20 40 60 80 100
-2-1
01
2
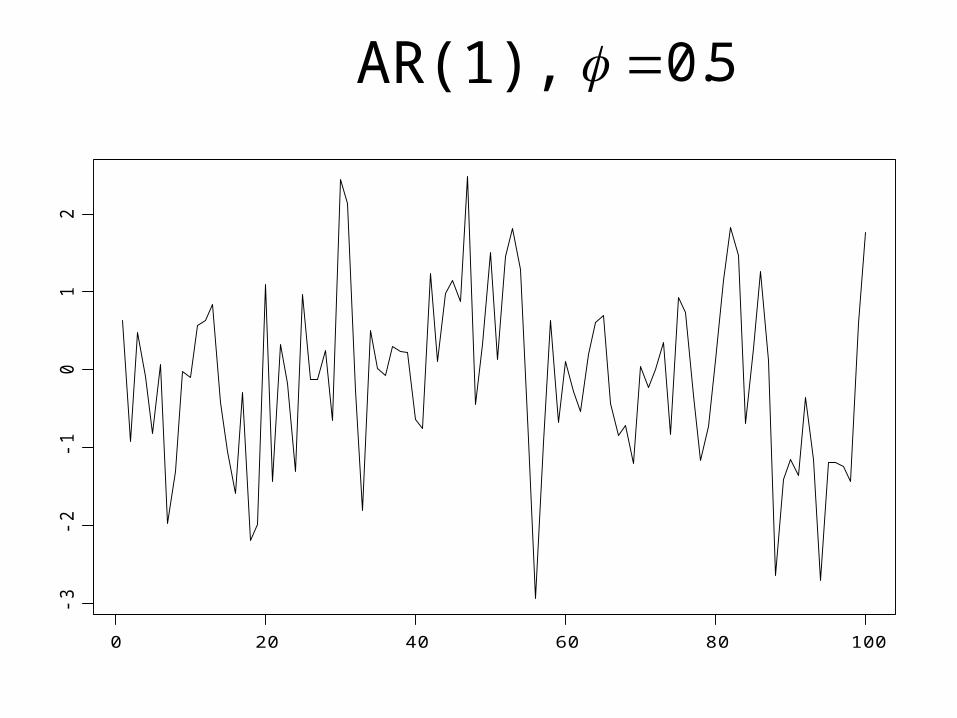
AR(1),
0 20 40 60 80 100
-3-2
-10
12
5.0
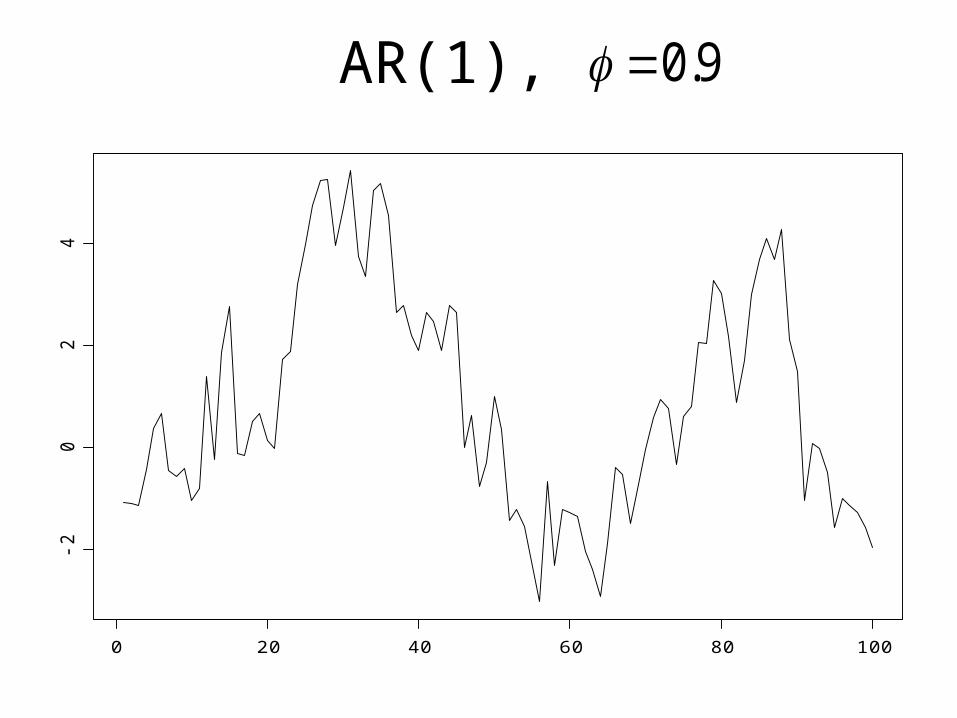
AR(1),
0 20 40 60 80 100
-20
24
9.0
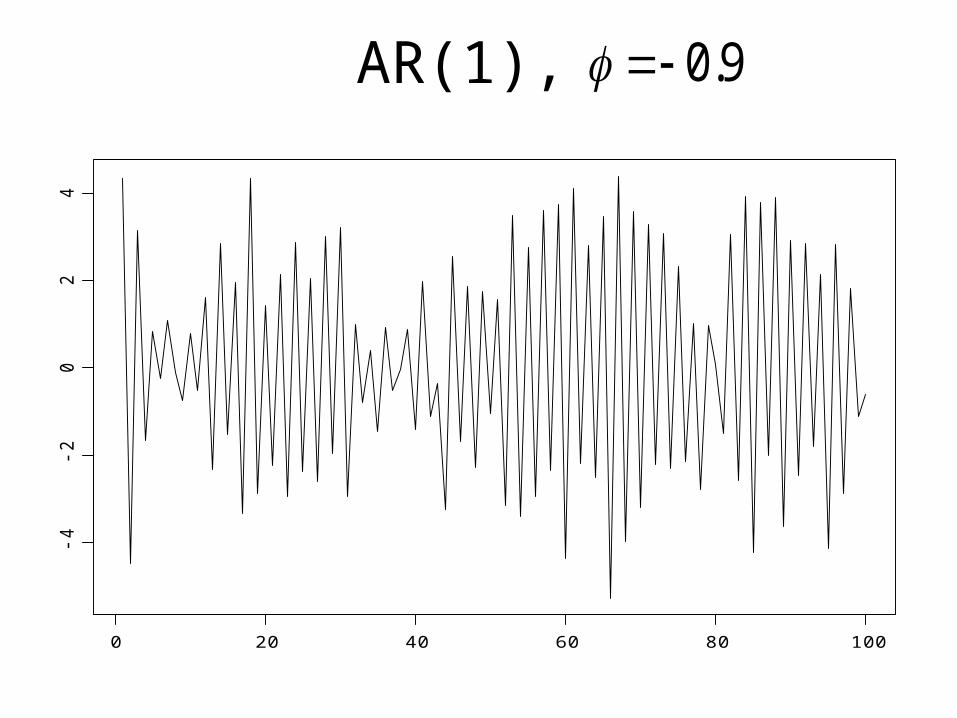
AR(1),
0 20 40 60 80 100
-4-2
02
49.0
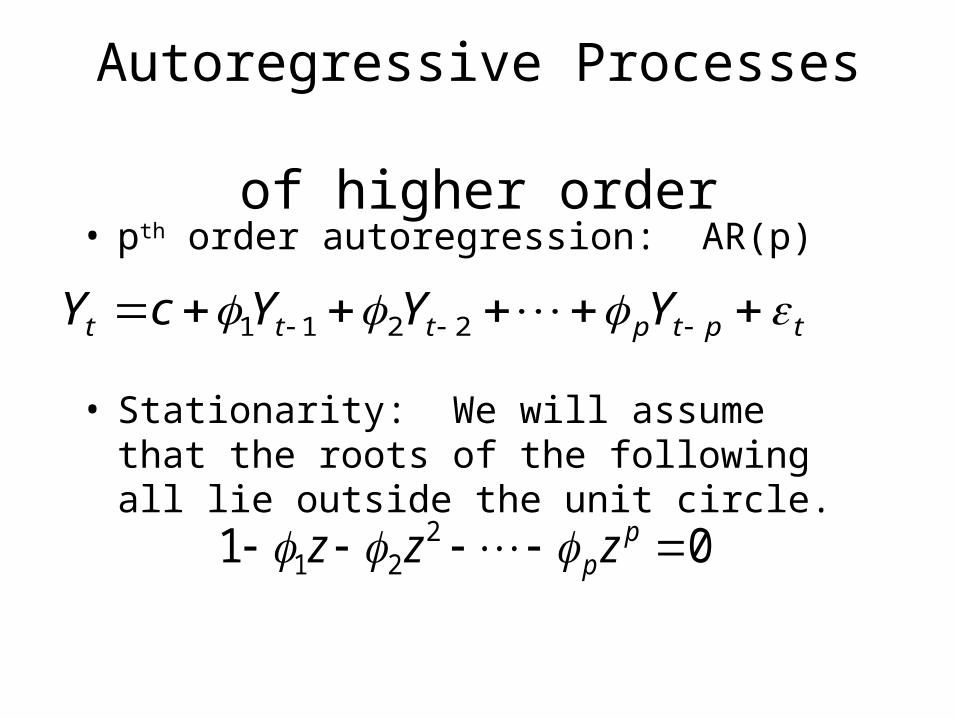
Autoregressive Processes of higher order
• pth order autoregression: AR(p)
• Stationarity: We will assume that the roots of the following all lie outside the unit circle.
tptpttt YYYcY 2211
01 221 p
p zzz
Properties of AR(p)
• Can solve for autocovariances / autocorrelations using Yule-Walker equations
p
c
211
Mixed Autoregressive Moving Average Processes
• ARMA(p,q) includes both autoregressive and moving average terms
qtqtt
tptpttt YYYcY
2211
2211

Time Series Models for Financial Data
• A Motivating Example– Federal Funds rate– We are interested in forecasting not only the
level of the series, but also its variance.– Variance is not constant over time
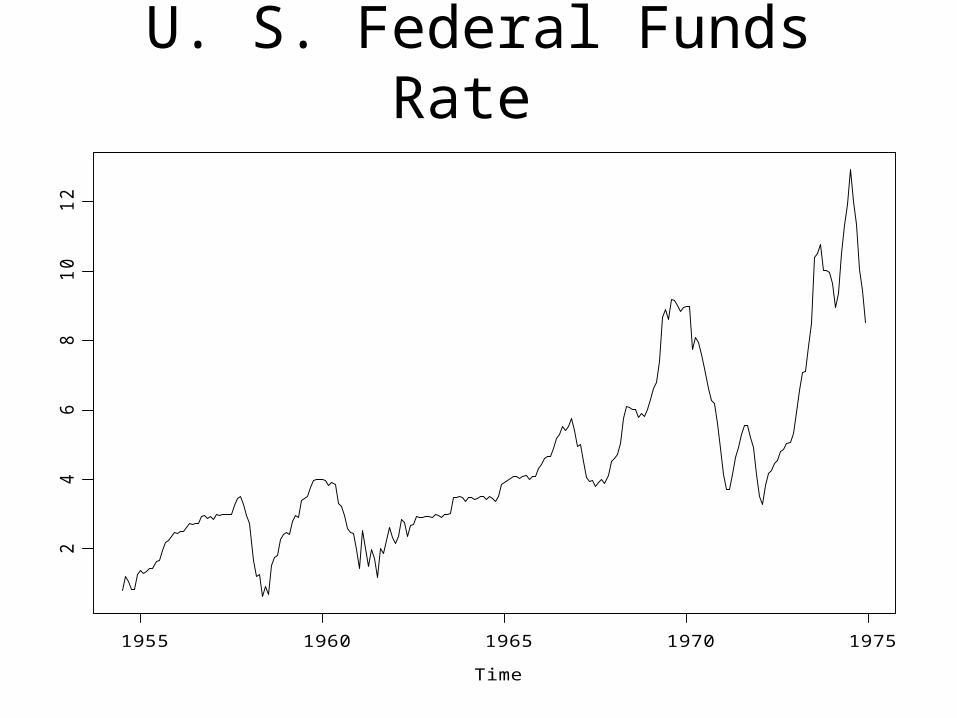
U. S. Federal Funds Rate
Time
1955 1960 1965 1970 1975
24
68
10
12
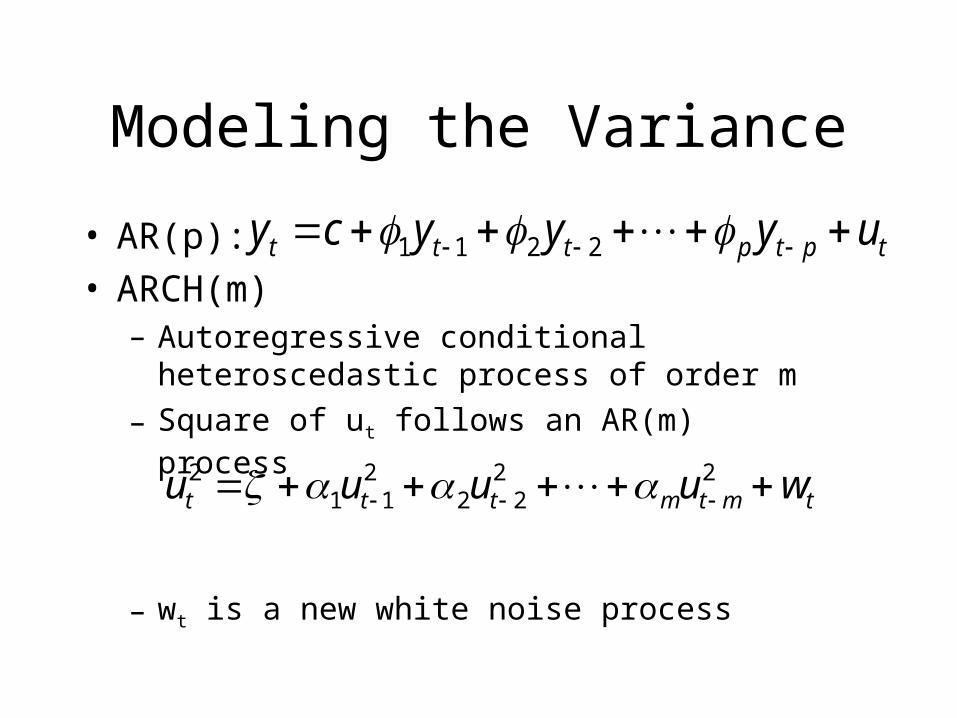
Modeling the Variance
• AR(p):• ARCH(m)
– Autoregressive conditional heteroscedastic process of order m
– Square of ut follows an AR(m) process
– wt is a new white noise process
tptpttt uyyycy 2211
tmtmttt wuuuu 22
222
112
References
• Investopia.com
• Economagic.com
• Hamilton, J. D. (1994), Time Series Analysis, Princeton, New Jersey: Princeton University Press.
Top Related