


γλώσσες
Σελίδες
Νομικός

GAM for large datasets and load forecasting
Simon Wood, University of Bath, U.K.
in collaboration with
Yannig Goude, EDF
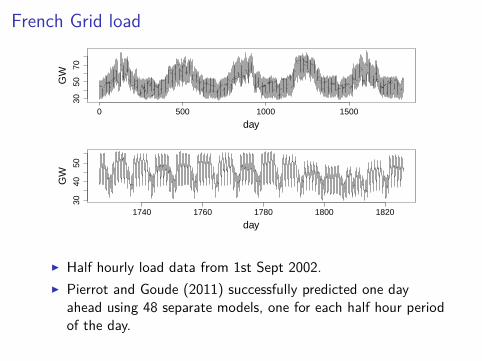
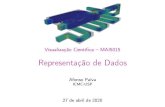
French Grid load
0 500 1000 1500
3050
70
day
GW
1740 1760 1780 1800 1820
3040
50
day
GW
I Half hourly load data from 1st Sept 2002.I Pierrot and Goude (2011) successfully predicted one day
ahead using 48 separate models, one for each half hour periodof the day.
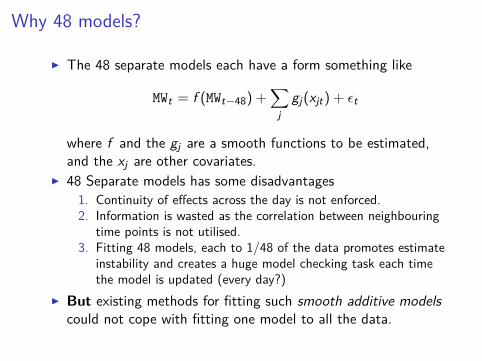
Why 48 models?
I The 48 separate models each have a form something like
MWt = f (MWt−48) +∑
jgj(xjt) + εt
where f and the gj are a smooth functions to be estimated,and the xj are other covariates.
I 48 Separate models has some disadvantages1. Continuity of effects across the day is not enforced.2. Information is wasted as the correlation between neighbouring
time points is not utilised.3. Fitting 48 models, each to 1/48 of the data promotes estimate
instability and creates a huge model checking task each timethe model is updated (every day?)
I But existing methods for fitting such smooth additive modelscould not cope with fitting one model to all the data.
Smooth additive models
I The basic model is
yi =∑
jfj(xji) + εi
where the fj are smooth functions to be estimated.I Need to estimate the fj (including how smooth).I Represent each fj using a spline basis expansion
fj(xj) =∑
k bjk(xj)βjk where bjk are basis functions and βjkare coefficients (maybe 10-100 of each).
I So model becomes
yi =∑
j
∑k
bjk(xji)βjk + εi = Xiβ + εi
. . . a linear model. But it is much too flexible.
Penalizing overfit
I To avoid over fitting, we penalize function wiggliness (lack ofsmoothness) while fitting.
I In particular letJj(fj) = βTSβ
measure wiggliness of fj .I Estimate β to minimize∑
i(yi − Xiβ)
2 +∑
jλjβ
TSβ
where λj are smoothing parameters.I High λj ⇒ smooth fj . Low λj ⇒ wiggly fj .
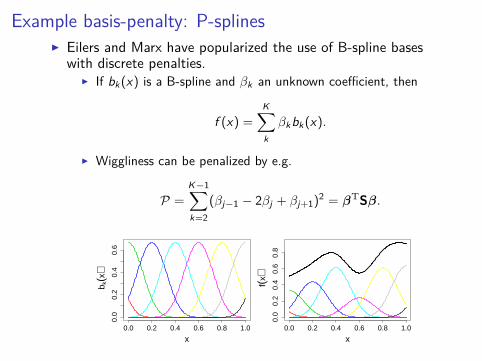
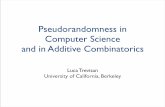
Example basis-penalty: P-splinesI Eilers and Marx have popularized the use of B-spline bases
with discrete penalties.I If bk(x) is a B-spline and βk an unknown coefficient, then
f (x) =K∑k
βkbk(x).
I Wiggliness can be penalized by e.g.
P =K−1∑k=2
(βj−1 − 2βj + βj+1)2 = βTSβ.
0.0 0.2 0.4 0.6 0.8 1.0
0.0
0.2
0.4
0.6
x
b k(x
)
0.0 0.2 0.4 0.6 0.8 1.0
0.0
0.2
0.4
0.6
0.8
x
f(x)
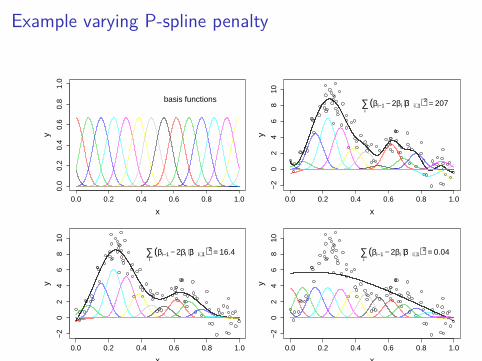
Example varying P-spline penalty
0.0 0.2 0.4 0.6 0.8 1.0
0.0
0.2
0.4
0.6
0.8
1.0
x
y
basis functions
0.0 0.2 0.4 0.6 0.8 1.0
−2
02
46
810
x
y
∑i
(βi−1 − 2βi + βi+1)2 = 207
0.0 0.2 0.4 0.6 0.8 1.0
−2
02
46
810
x
y
∑i
(βi−1 − 2βi + βi+1)2 = 16.4
0.0 0.2 0.4 0.6 0.8 1.0
−2
02
46
810
x
y∑
i(βi−1 − 2βi + βi+1)2 = 0.04
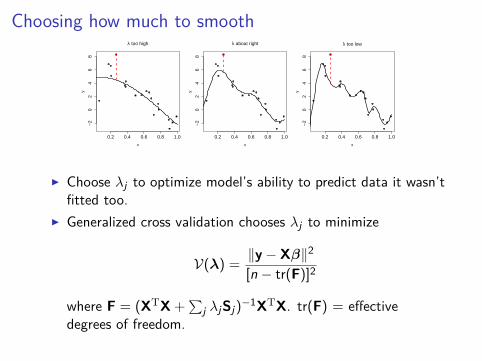
Choosing how much to smooth
0.2 0.4 0.6 0.8 1.0
−2
02
46
8
λ too high
x
y
0.2 0.4 0.6 0.8 1.0
−2
02
46
8
λ about right
x
y
0.2 0.4 0.6 0.8 1.0
−2
02
46
8
λ too low
x
y
I Choose λj to optimize model’s ability to predict data it wasn’tfitted too.
I Generalized cross validation chooses λj to minimize
V(λ) = ‖y − Xβ‖2
[n − tr(F)]2
where F = (XTX +∑
j λjSj)−1XTX. tr(F) = effective
degrees of freedom.
The main problem
I We estimate β by the minimizer of
‖y − Xβ‖2 +∑
jλjβ
TSβ
and the λj to minimise
V(λ) = ‖y − Xβ‖2
[n − tr(F)]2
I If X is too large, then we can easily run out of computermemory when trying to fit the model.
I A simple approach will let us fit the model without forming Xwhole.
A smaller equivalent fitting problem
I Let X be n × pI Consider the QR decomposition X = QR, where R is p × p
and Q has orthogonal columns.I Let f = QTy and γ = ‖y‖2 − ‖f‖2.I ‖y − Xβ‖2 = ‖f − Rβ‖2 + γ and
V(λ) = ‖y − Xβ‖2
[n − tr(F)]2 =‖f − Rβ‖2 + γ
[n − tr(F)]2
where F = (RTR +∑
j λjSj)−1RTR.
I So once we have R and f we can estimate β and λ withoutX. . .
QR updating for R and f
I Let X =
[X0X1
], y =
[y0y1
]
I Form X0 = Q0R0 &[
R0X1
]= Q1R.
I Then X = QR where Q =
[Q0 00 I
]Q1.
I Also f = QTy = QT1
[QT
0 y0y1
]I Applying these results recursively, R and f can be
accumulated from sub-blocks of X without forming X whole.
XTX updating and Choleski
I R is the Choleski factor of XTX.I Partitioning X row-wise into sub-matrices X1, X2, . . ., we have
XTX =∑
jXT
j Xj
which can be used to accumulate XTX without needing toform X whole.
I At same time accumulate XTy =∑
j XTj y.
I Choleski decomposition gives RTR = XTX, and f = R−1XTy.I This is twice as fast as QR approach, but less numerically
stable.
Generalizations
1. Generalized additive models (GAMs) allow distributions otherthan normal (and non-identity link functions).
2. GAMs can be estimated by iteratively estimating workinglinear models, using R and f accumulation tricks on each.
3. REML, AIC etc can also be used for λj estimation. REML canbe made especially efficient in this context.
4. The accumulation methods are easy to parallelize.5. Updating a model fit with new data is very easy.6. AR1 residuals can also be handled easily in the
non-generalized case.
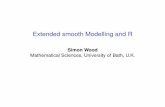
Air pollution example
I Around 5000 daily death rates, for Chicago, along with time,ozone, pm10, tmp (last 3 averaged over preceding 3 days).Peng and Welty (2004).
I Appropriate GAM is: deathi ∼ Poi,
log{E(deathi)} = f1(timei) + f2(ozonei , tmpi) + f3(pm10i).
I f1 and f3 penalized cubic regression splines, f2 tensor productspline.
I Results suggest a very strong ozone - temperature interaction.
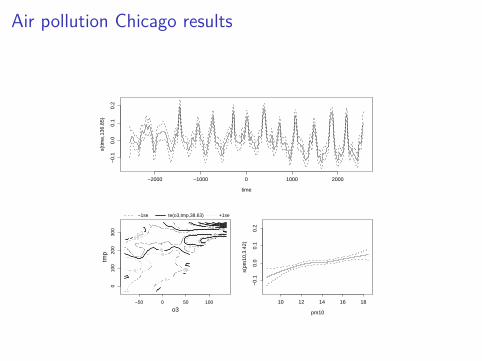
Air pollution Chicago results
−2000 −1000 0 1000 2000
−0.
10.
00.
10.
2
time
s(tim
e,13
6.85
)
te(o3,tmp,38.63)
−50 0 50 100
010
020
030
0
o3
tmp
−1se +1se
10 12 14 16 18
−0.
10.
00.
10.
2
pm10
s(pm
10,3
.42)
Air pollution Chicago results
I To test the truth of ozone-temp interaction it would be goodto fit to the equivalent data for around 100 other cities,simultaneously.
I Model is
log{E (deathi)} = γj + αk + fk(o3i , tempi) + f4(ti)
if observation i is from city j and age group k (there are 3 agegroups recorded).
I Model has 802 coefs and is estimated from 1.2M data.I Fitting takes 12.5 minutes using 4 cores of a $600 PC.I Same model to just Chicago, takes 11.5 minutes by previous
methods.
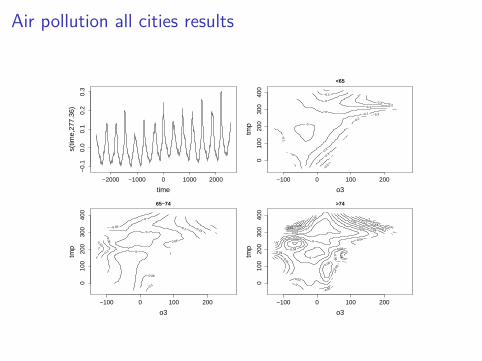
Air pollution all cities results
−2000 −1000 0 1000 2000
−0.
10.
00.
10.
20.
3
time
s(tim
e,27
7.36
)<65
o3
tmp
−0.5
−0.3 −0.2
−0.2 −0.2
−0.1
−0.1
−0.1
0
0
0
0
0.1 0.2
0.3
−100 0 100 200
010
020
030
040
0
65−74
o3
tmp
−0.05
0
0
0
0.05
0.05
0.05
0.1
0.1
0.1
0.15
0.15
−100 0 100 200
010
020
030
040
0
>74
o3
tmp
−0.02
−0.02
0
0
0
0
0.02
0.0
2
0.02
0.04 0.04 0.04
0.0
4
0.04
0.04
0.06
0.06
0.06
0.06
0.06 0.08
0.08
0.08
0.1
0.12 0.14
−100 0 100 200
010
020
030
040
0
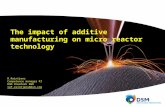
Back to grid load
0 500 1000 1500
3050
70
day
GW
1740 1760 1780 1800 1820
3040
50
day
GW
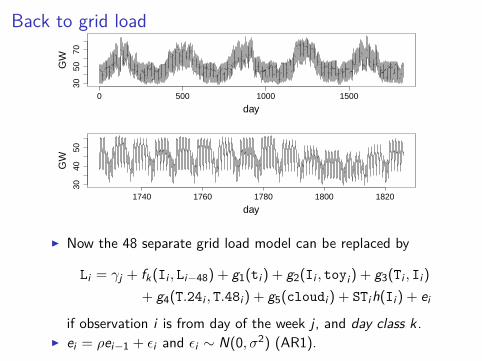
I Now the 48 separate grid load model can be replaced by
Li = γj + fk(Ii , Li−48) + g1(ti) + g2(Ii , toyi) + g3(Ti , Ii)
+ g4(T.24i , T.48i) + g5(cloudi) + STih(Ii) + ei
if observation i is from day of the week j, and day class k.I ei = ρei−1 + εi and εi ∼ N(0, σ2) (AR1).
Fitting grid load model
I Using QR update fitting takes under 30 minutes and weestimate ρ = 0.98.
I Update with new data then takes under 2 minutes.I We fit up to 31 August 2008, and then predicted the next
years data, one day at a time, with model update.I Predictive RMSE was 1156MW (1024MW for fit). Predictive
MAPE 1.62% (1.46% for fit).I Setting ρ = 0 gives overfit, and worse predictive performance.
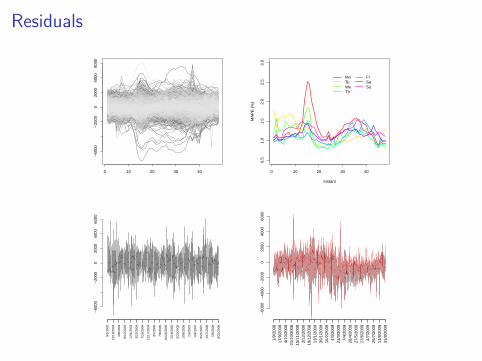
Residuals
0 10 20 30 40
−60
00−
2000
020
0040
0060
00
0 10 20 30 40
0.5
1.0
1.5
2.0
2.5
3.0
Instant
MA
PE
(%
)
MoTuWeTh
FrSaSu
9/1/
2002
12/1
9/20
02
4/8/
2003
8/12
/200
3
12/4
/200
3
3/22
/200
4
7/26
/200
4
11/1
7/20
04
3/7/
2005
7/6/
2005
10/2
3/20
05
2/18
/200
6
6/20
/200
6
10/8
/200
6
2/3/
2007
6/4/
2007
9/21
/200
7
1/17
/200
8
5/6/
2008
8/31
/200
8
−60
00−
2000
020
0040
0060
00
1/9/
2008
17/9
/200
84/
10/2
008
21/1
0/20
0815
/11/
2008
2/12
/200
819
/12/
2008
13/1
/200
930
/1/2
009
16/2
/200
94/
3/20
0921
/3/2
009
7/4/
2009
28/4
/200
927
/5/2
009
17/6
/200
94/
7/20
0925
/7/2
009
11/8
/200
931
/8/2
009
−60
00−
4000
−20
000
2000
4000
6000
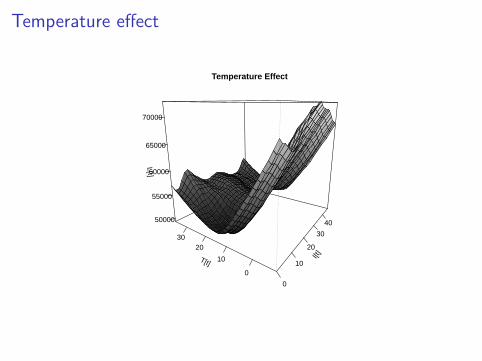
Temperature effect
I[t]
0
10
20
30
40
T[t]0
10
2030
L[t]
50000
55000
60000
65000
70000
Temperature Effect
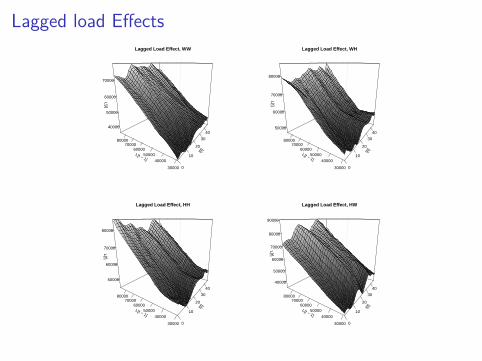
Lagged load Effects
I[t]
0
10
20
30
40
L[t − 1]
30000
40000
5000060000
7000080000
L[t]
40000
50000
60000
70000
Lagged Load Effect, WW
I[t]
0
10
20
30
40
L[t − 1]
30000
40000
5000060000
7000080000
L[t]
50000
60000
70000
80000
Lagged Load Effect, WH
I[t]
0
10
20
30
40
L[t − 1]
30000
40000
5000060000
7000080000
L[t]
50000
60000
70000
80000
Lagged Load Effect, HH
I[t]
0
10
20
30
40
L[t − 1]
30000
40000
5000060000
7000080000
L[t]
40000
50000
60000
70000
80000
90000
Lagged Load Effect, HW
Top Related