TRIGONOMETRÍA...Sea αun ángulo positivo menor de una vuelta perteneciente al IVC, tal que: α= π...
56
TRIGONOMETRÍA Profesor: Jonathan Cumpa Velásquez
Transcript of TRIGONOMETRÍA...Sea αun ángulo positivo menor de una vuelta perteneciente al IVC, tal que: α= π...

TRIGONOMETRÍA
Profesor:Jonathan Cumpa Velásquez

TRIGONOMETRÍA
RAZONES TRIGONOMÉTRICAS
RT DE UN ÁNGULO EN POSICIÓN ESTÁNDAR

RT DE UN ÁNGULO EN POSICIÓN ESTÁNDAR
1.-Ángulo en posición estándar:
𝛂
𝛃
𝛉
Y
O XX’
Y’
IV C
I CII C
III C
α ∈ IIC m∢α > 0,
β ∈ IVC m∢β < 0,
• α es un ángulo en posición estándar
• θ:no es un ángulo en posición estándar
• β es un ángulo en posición estándar

RT DE UN ÁNGULO EN POSICIÓN ESTÁNDAR
2.-Ángulo cuadrantal:
O
𝟗𝟎°
𝟏𝟖𝟎°
27𝟎°
𝟑𝟔𝟎°
𝟎
Múltiplo de 90n° ∨nπ
2rad
𝛑
𝟐𝐫𝐚𝐝
𝛑𝐫𝐚𝐝
𝟑𝛑
𝟐𝐫𝐚𝐝
𝟐𝛑𝐫𝐚𝐝<>
• ∀ 𝐧 ∈ ℤ

RT DE UN ÁNGULO EN POSICIÓN ESTÁNDAR
2.1- Forma general de los ángulos cuadrantales:
2nπ(2n + 1)π
4n + 1π
2
4n + 3π
2
𝐧𝛑
𝟐𝐧 + 𝟏𝛑
𝟐
• ∀ 𝐧 ∈ ℤ
O
Y
XX’
Y’
𝐧𝛑
𝟐

RT DE UN ÁNGULO EN POSICIÓN ESTÁNDAR
• ∀ 𝐧 ∈ ℤ
O 2nπ(2n + 1)π
4n + 1π
2
4n + 3π
2
nπ
2n + 1π
2
Y
XX’
Y’
OX: 2nπ; ∀ 𝐧 ∈ ℤ
OX’: (2n + 1)π; ∀ 𝐧 ∈ ℤ
OY:4n + 1 π
2; ∀ 𝐧 ∈ ℤ
OY’:4n + 3 π
2; ∀ 𝐧 ∈ ℤ
X’X : 𝐧𝛑; ∀ 𝐧 ∈ ℤ
Y’Y :𝟐𝐧 + 𝟏 𝛑
𝟐; ∀ 𝐧 ∈ ℤ
• Si: α ∈ IC ↔ 2nπ < α <4n + 1 π
2
• Si: ↔4n + 1 π
2< α < (2n + 1)πα ∈ IIC
• Si: ↔ 2n + 1 π < α <4n + 3 π
2α ∈ IIIC
• Si: ↔4n + 3 π
2< α < 2(n + 1)πα ∈ IVC

RT DE UN ÁNGULO EN POSICIÓN ESTÁNDAREjemplo:Sea A el conjunto de ángulos cuadrantales cuyo lado final pertenece a OY′ y B el conjunto de ángulos cuadrantales cuyo lado final pertenece al eje de ordenadas, calcular B-A (n ∈ ℤ)
A
𝐁 = 𝟐𝐧 + 𝟏𝛑
𝟐
∴ 𝐁 − 𝐀 = 𝟒𝐧 + 𝟏𝛑
𝟐
O
4n + 1π
2
𝟒𝐧 + 𝟑𝛑
𝟐
Y
Y’
RESOLUCIÓN:

RT DE UN ÁNGULO EN POSICIÓN ESTÁNDAREjemplo:Sea α un ángulo positivo menor de una vuelta perteneciente al IVC, tal que: α =
π
23+2π
23+3π
23+⋯+
nπ
23rad; n ∈ ℤ
Calcular la diferencia entre el mayor y menor valor que pueda tomar α.
RESOLUCIÓN:
α ∈ IVC3π
2< α < 2π
α =π
23+2π
23+3π
23+⋯+
nπ
23rad; n ∈ ℤ
α =π
23
n n + 1
2rad
3π
2<
π
23×
n n + 1
2<
4π
2
69 < n n + 1 < 92
nmín = 8 → 69 < (8)(9) < 92
nmáx = 9 → 69 < 9 10 < 92
… 𝐢
αmín =36π
23
αmáx =45π
23
• Reemplazando en i :
nmín = 8
nmáx = 9
αmáx − αmín =45π
23−36π
23
∴ 𝛂𝐦á𝐱 − 𝛂𝐦í𝐧 =𝟗𝛑
𝟐𝟑

RT DE UN ÁNGULO EN POSICIÓN ESTÁNDAR
3.-Ángulos coterminales:
𝛂
𝛂
𝛃
𝛃
𝛂 − 𝛃 = 𝟑𝟔𝟎𝐧°𝟐𝐧𝛑𝐫𝐚𝐝
∀ 𝐧 ∈ ℤ
𝐑𝐓 𝛂 = 𝐑𝐓 𝛃
LF
LI

RT DE UN ÁNGULO EN POSICIÓN ESTÁNDAR
Dos ángulos coterminales están en la relación de 13 a 1, la diferencia de ellos es mayor que 1 200°, pero menor que 1 500°. Hallar el mayor ángulo
α
β=
13
1
Sea: α y β los ángulos coterminales
1200° < α − β < 1500°
α − β = 360n°
α = 13k β = 1k∧
1200° < 360n° < 1500°
360n° = 1440°
12k = 1440°
𝐤 = 120°
Hallar el mayor ángulo:
α = 13(120°)
∴ 𝛂 = 𝟏𝟓𝟔𝟎°
Ejemplo:
RESOLUCIÓN:

RT DE UN ÁNGULO EN POSICIÓN ESTÁNDAR
Calcular la media aritmética de todos los ángulos positivos coterminales con 230° y menores de 10 000°
x − 230° = 360n° , ∀ n ∈ ℤ
x = 360n°+ 230°
0 < x < 10000°
0 < 360n° + 230° < 10000°
−230° < 360n° < 9770°
−0,63 < n < 27,13
nℤ = 0, 1, 2 …27
28 términos
x = 360 0 ° + 230°
x = 360 1 ° + 230°
x = 360 2 ° + 230°
.
.
.
.
.
.
.
.
.
x = 360 27 ° + 230°
MA =360° .
27(27 + 1)2
+ 230°. 28
28
∴ 𝐌𝐀 = 𝟓𝟎𝟗𝟎°
Ejemplo:
RESOLUCIÓN:

RT DE UN ÁNGULO EN POSICIÓN ESTÁNDAR
4.-Cálculo de las razones trigonométricas:
O X
Y
P x; y
𝛉
r = x2 + y2 ; r > 0
Senθ =y
r
Cosθ =x
r
Tanθ=y
xCotθ =
x
y
Secθ =r
x
Cscθ =r
y
•
•
••
•
•
r
• x ∧ y ≠ 0

RT DE UN ÁNGULO EN POSICIÓN ESTÁNDAR
Ejemplo:Calcular: 13Cosα + 10Senβ
RESOLUCIÓN:
O
Y
X
α
β
a a
b
(a + b)2= (2a)2+b2
a2 + 2ab + b2 = 4a2 + b2
• Por el Teorema de Pitágoras:
2ab = 3a2
2
3=
a
b
a2 2
3
(−2; 3)
(−4; 3)
(4;−3)
a + b
• Calcular: 13Cosα + 10Senβ
13
5 13−2
13+ 10
−3
5
−2 − 6
−𝟖

RT DE UN ÁNGULO EN POSICIÓN ESTÁNDAR
5.-Razones trigonométricas de los ángulos cuadrantales:
1 0 N 0 N 1Sen Cos Tan Cot Sec Csc
0 1 0 N 1 NSen Cos Tan Cot Sec Csc
O
(+)
(+)(−)
(−)
• N: no definido

RT DE UN ÁNGULO EN POSICIÓN ESTÁNDAREjemplo:Sean α y β ángulos coterminales que están en la relación de 7 a 29, además la suma de ellos se encuentra en el intervalo
720°; 1440° . Hallar el seno del ángulo mayor multiplicado por 22
36sumado del ángulo menor multiplicado por
11
18.
RESOLUCIÓN:
α ∧ β: ∢s coterminales
β
α=
7
29
i. 720° < α + β < 1440°
k
kβ = 7k α = 29k,
720° < 36k < 1440°
20° < k < 40°
ii. α − β = 360n°
22k = 360n°11k = 180n°
220° < 11k < 440°
11k = 360°
x11
•Sen 29k.
22
36+ 7k.
22
36
Sen22
3636k
Sen 720°
𝟎
•
Sen 22k

RT DE UN ÁNGULO EN POSICIÓN ESTÁNDAR
6.-Signos de las razones trigonométricas:
Todas (+)Sen
(+)Csc
(+)Tan
Cot
Cos(+)
Sec

RT DE UN ÁNGULO EN POSICIÓN ESTÁNDAR
Ejemplo:Determinar el signo de P;Q y R: P = Sen
1997π
7Q = Tan
1471π
6R = Cos
3852π
5RESOLUCIÓN:
P = Sen1997π
7
1997π 𝟕
285π1995π
2π
P = Sen 285π +2π
𝟕
P = (−)
Q = Tan1471π
6
1471π 𝟔
245π1470π
1π
Q = Tan 245π +π
𝟔
Q = (+)
R = Cos3852π
5
3852π 𝟓
770π3850π
2π
R = Cos 770π +2π
𝟓
R = (+)

TRIGONOMETRÍA
PROBLEMAS Y RESOLUCIÓN
MOMENTO DE PRACTICAR

R.T. DE UN ÁNGULO EN POSICIÓN ESTÁNDAR1. Si se tiene que : |Cosθ| + Cosθ = 0 y además: 2Cotθ = 2 +
1
4 +1
4 +1
5 + 2
Calcular el valor de: S = 5Cosθ − 3Sen2θ
RESOLUCIÓN:
2Cotθ = 2 +1
4 +1
4 +1
5 + 25 − 2
5 + 2
5 − 2
5 + 2
5 − 2
5
Cotθ =5
2Cosθ = −Cosθ
−
O
− 5;−2
3
S = 5Cosθ − 3Sen2θ
S = 5− 5
3− 3
−2
3
2
S = −5
3−4
3
∴ 𝐒 = −𝟑

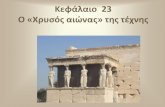
R.T. DE UN ÁNGULO EN POSICIÓN ESTÁNDAR2. Del gráfico mostrado, determine el valor de “Tanθ”, si se tiene que el área del triángulo EKI es de 54u2
O
E
K
I
R 4; 20
5; 0
θ
y = 2 x − 5 2
a; 2 a − 5 2
8 − a; 2 3 − a 2
20 =2 a − 5 2 + 2 3 − a 2
2
20 = a2 − 10a + 25 + 9 − 6a + a2
a2 − 8a + 7 = 0aa
−7−1
a = 7a = 1
→ E(1; 32)
→ I(7; 8)
→ K x; y = (x; 2 x − 5 2)
RESOLUCIÓN:

R.T. DE UN ÁNGULO EN POSICIÓN ESTÁNDAR
O
E(1; 32)
K(x; y)
I(7; 8)
θ
𝟓𝟒𝐮𝟐
1 32
x y
7 8
1 32
y
8x
224
32x
7y
8
𝐃𝐈
54 =216 − 24x − 6y
2
54 = 108 − 12x − 3y
4x + y = 18
4x + 2 x − 5 2 = 18
x2 − 8x + 16 = 0
x − 4 2 = 0
x = 4 → y = 2
Tanθ =2
4
∴ 𝐓𝐚𝐧𝛉 =𝟏
𝟐

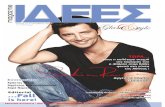
R.T. DE UN ÁNGULO EN POSICIÓN ESTÁNDAR3. Si “a” es la abscisa del punto B y “b” es la ordenada del punto A, además |a| = 2b, calcular: S = Cotα - Cotθ. Dato: AB = BC.
RESOLUCIÓN:
O
A
B
C
α
θ
(a; 0)
(n; b)
(m;−b)
S = Cotα − Cotθ
S =n
b−
m
−b
S =n +m
b
S =2a
b
a = 2b
a < 0
−a = 2b
S =−4b
b
∴ 𝐒 = −𝟒

R.T. DE UN ÁNGULO EN POSICIÓN ESTÁNDAR4. El menor de dos ángulos coterminales está comprendido entre 540° y 640°. Calcular el mayor ángulo si se sabe que es el cuádruple del menor.
RESOLUCIÓN:
Sean: α y β los ángulos coterminalesα > β
α − β = 360n°
540° < β < 640°
α = 4β
→ 4β − β = 360n°
β = 120n°
→ 540° < 120n° < 640°
β = 600°
∴ 𝛂 = 𝟐𝟒𝟎𝟎°

R.T. DE UN ÁNGULO EN POSICIÓN ESTÁNDAR
5. Sabiendo que: ak = Sen 2K + 1π
2+ Cos 2K + 1
π
2+ TanKπ Calcular el valor de: M =
a0 + a2a1 + a3
RESOLUCIÓN:
ak = Sen 2K + 1π
2+ Cos 2K + 1
π
2+ TanKπ
±1 0 0
ak = Sen 2K + 1π
2
K = 0 → a0 = 1
K = 1 → a1 = −1
K = 2 → a2 = 1
K = 3 → a3 = −1
M =a0 + a2a1 + a3
M =1 + 1
−1 − 1
∴ 𝐌 = −𝟏

6. Se tiene que α y θ son positivos y menores que una vuelta, para los cuales se tiene que:
Tanθ. Tanθ − Senα < 0 Cosα. Senθ − Cosα > 0
Hallar el signo de:
S =Cosθ + Tanα
Senα − Senθ
RESOLUCIÓN:
R.T. DE UN ÁNGULO EN POSICIÓN ESTÁNDAR
Tanθ. Tanθ − Senα < 0
+−
Tanθ − Senα > 0
Tanθ > Senα
Senα < 0
Cosα. Senθ − Cosα > 0
++
Senθ − Cosα > 0
Senθ > Cosα
Senθ > 0
θ: α:
S =Cosθ + Tanα
Senα − Senθ
S =− + −
− − +
S =−
−
∴ 𝐒 = +

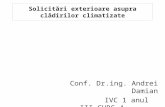
R.T. DE UN ÁNGULO EN POSICIÓN ESTÁNDAR11. Del gráfico mostrado, calcule: M = 2Tanα + 3Tanβ
X
Y
β
(1 − a;−2)
α
(a;−3)
𝐂𝐋𝐀𝐕𝐄:𝐀

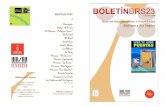
R.T. DE UN ÁNGULO EN POSICIÓN ESTÁNDAR12. De la figura adjunta calcular: Tanθ − 5Secθ
X
Y
x2 + y2 + 4x − 2y = 0
θ
O
L: x − y + 6 = 0
A
𝐂𝐋𝐀𝐕𝐄:𝐀

R.T. DE UN ÁNGULO EN POSICIÓN ESTÁNDAR13. Si se cumple que SenxCos2θ = 1 y además “x” y “θ” son ángulos no negativos y menores que una vuelta; hallar el menor valor de “x + θ”
𝐂𝐋𝐀𝐕𝐄: 𝐂

R.T. DE UN ÁNGULO EN POSICIÓN ESTÁNDAR14. Si el ángulo x es positivo pertenece al cuarto cuadrante y es tal que 0 < x ≤ 2π, entonces hallar el signo de las siguientes expresiones trigonométricas.
∗Tan
x4
Senx2
Cscx4
∗Cot
x3
Sec3x4
Cosx5
∗Sen
x3
Tan2x3
Sec3x4
𝐂𝐋𝐀𝐕𝐄:−

R.T. DE UN ÁNGULO EN POSICIÓN ESTÁNDAR15. Se tiene dos ángulos cuadrantales negativos que están en la relación de 3 a 4. Calcular el mayor, si la diferencia de él con el menor es 180°.
𝐂𝐋𝐀𝐕𝐄:𝐁

TRIGONOMETRÍA
RAZONES TRIGONOMÉTRICAS
REDUCCIÓN AL PRIMER CUADRANTE

REDUCCIÓN AL PRIMER CUADRANTE
𝟏𝐞𝐫𝐂𝐀𝐒𝐎: Para ángulos positivos y menores a una vuelta𝐑𝐓 𝟗𝟎° + 𝛂
𝐑𝐓 𝟏𝟖𝟎° ± β
𝐑𝐓 𝟐𝟕𝟎° ± 𝛉
𝐑𝐓 𝟑𝟔𝟎° − 𝛗
𝟏𝐞𝐫paso
𝐃𝐞𝐬𝐜𝐨𝐦𝐩𝐨𝐧𝐞𝐫
𝟐𝐝𝐨 paso
𝐒𝐢𝐠𝐧𝐨
±
±
±
±
𝟑𝐞𝐫 paso
¿ 𝐂𝐚𝐦𝐛𝐢𝐚?
CO-𝐑𝐓 𝛂
CO-𝐑𝐓 𝛉
𝐑𝐓 𝛃
𝐑𝐓 𝛗
𝐒𝐈
𝐍𝐎
=
=
=
=
𝟗𝟎°
𝟏𝟖𝟎°
𝟐𝟕𝟎°
𝟑𝟔𝟎°
𝟗𝟎° + 𝛂
𝟏𝟖𝟎° − 𝛃
𝟏𝟖𝟎° + 𝛃
𝟐𝟕𝟎° − 𝛉 𝟐𝟕𝟎° + 𝛉
𝟑𝟔𝟎° − 𝛗

REDUCCIÓN AL PRIMER CUADRANTE
Nota:a) El signo ± dependerá del cuadrante y la RT del ángulo a reducir.
b) Para ubicar el cuadrante consideremos el ángulo a trabajar como (agudo), RTnπ
2± θ 0 < θ < 90°
c) Gráficamente para un ángulo agudo.
𝟗𝟎°
𝟏𝟖𝟎°
𝟐𝟕𝟎°
𝟑𝟔𝟎°
𝛂
𝟗𝟎° + 𝛂
ββ
𝟏𝟖𝟎° − 𝛃
𝟏𝟖𝟎° + 𝛃 θ θ
𝟐𝟕𝟎° − 𝛉 𝟐𝟕𝟎° + 𝛉
φ
𝟑𝟔𝟎° − 𝛗

REDUCCIÓN AL PRIMER CUADRANTE
Calcular : Sen135°Csc225° + Tan240°Cot330°
Sen(180° - 45°).Csc(180°+ 45°) + Tan(180° + 60°).Cot(270° + 60°)
(+Sen45°) (-Csc45°) (+Tan60°) (-Tan60°)
-1 -3+
-4
+× ×
Ejemplo:
RESOLUCIÓN:

REDUCCIÓN AL PRIMER CUADRANTE
Calcular: E =Sec
4π3
Csc7π6
Tan2π3
Sen3π4
Cos5π3
Tan5π6
E =Sec π +
π3 Csc π +
π6 Tan π −
π3
Sen π −π4 Cos 2π −
π3 Tan π −
π6
E =−Sec
π3 −Csc
π6 −Tan
π3
+Senπ4 +Cos
π3 −Tan
π6
E =2 2 3
1
2
12
1
3
∴ 𝐄 = 𝟐𝟒 𝟐
Ejemplo:
RESOLUCIÓN:

REDUCCIÓN AL PRIMER CUADRANTE
i. Ángulos Complementarios:
x + y = 90°
Senx = Cosy
Tanx = Coty
Secx = Cscy
ii. Ángulos Suplementarios:
x + y = 180°
Senx = Seny
Cosx = −Cosy
Tanx = −Tany
Ángulos relacionados:iii. Ángulos Explementarios:
x + y = 360°
Senx = −Seny
Cosx = Cosy
Tanx = −Tany

REDUCCIÓN AL PRIMER CUADRANTE
Sabiendo que A + B = 180° ,calcular:
A + B = 180°
A
2+
B
2= 90°
Suplementarios
Complementarios
CosA = −CosB
TanA
2= Cot
B
2
E =−CosB Cot
B2
CotB2 CosB
∴ 𝐄 = −𝟏
Ejemplo:
RESOLUCIÓN:
E =Cos A Cot
B2
TanA2 Cos(B)

REDUCCIÓN AL PRIMER CUADRANTE
Calcular el valor de: Sen2n+15π
17+ Sen2n+1
11π
17+ Sen2n+1
23π
17+ Sen2n+1
29π
17
+𝟐𝛑
∡s Explementarios:
Si: x + y = 2π
−Sen5π
17
2n+1−Sen
11π
17
2n+1
0
Sen2n+15π
17+ Sen2n+1
11π
17+ Sen2n+1
23π
17+ Sen2n+1
29π
17
Ejemplo:
RESOLUCIÓN:
Senx = −Seny

REDUCCIÓN AL PRIMER CUADRANTE
𝟐𝐝𝐨𝐂𝐀𝐒𝐎:Para ángulos positivos y mayores a una vuelta
𝐑𝐓 𝛃 = 𝐑𝐓 𝛂
Donde α es el residuo de:
βq
α
360°
𝐑𝐓 𝟐𝐧𝛑+ 𝛃 = 𝐑𝐓 𝛃
OBSERVACIÓN:
Sea β > 360°:

REDUCCIÓN AL PRIMER CUADRANTE
Calcular :Cos3660°
Sen840°
Resolución:
3660° 360°
1060°
840° 360°
2120°
Cos(𝟔𝟎°)
Sen(𝟏𝟐𝟎°)=
Cos60°
Sen(180° − 60°)=
Cos60°
Sen60°= Cot60°=
𝟑
𝟑
Ejemplo:

REDUCCIÓN AL PRIMER CUADRANTE
𝐑𝐓 𝐧𝛑 ± 𝛂
𝐑𝐓 𝟐𝐧 + 𝟏𝛑
𝟐± 𝛃
Conclusión:
± 𝐑𝐓 𝛂=
± 𝐂𝐎− 𝐑𝐓 𝛃=

REDUCCIÓN AL PRIMER CUADRANTE
Calcular el valor de la siguiente expresión: M = Sen245π
6Cos
163π
4Tan
77π
3
245 6
41−1
163 4
41−1
77 3
26−1
M = Sen 41π −1π
6Cos 41π −
1π
4Tan 26π −
1π
3
M = +Senπ
6−Cos
π
4−Tan
π
3
M =1
2−
2
2− 3
∴ 𝐌 =𝟔
𝟒
Ejemplo:
RESOLUCIÓN:

REDUCCIÓN AL PRIMER CUADRANTE
𝟑𝐞𝐫𝐂𝐀𝐒𝐎: Para ángulos negativos
Sen(− x)
Cos(− x)
Tan(− x)
Cot(− x)
Sec(− x)
Csc(− x)
−Senx
Cosx
−Tanx
−Cotx
−Cscx
Secx
=
=
=
=
=
=
Sea x > 0

REDUCCIÓN AL PRIMER CUADRANTE
Simplificar : E =Sen −120° − Cos −210° + Sec(−300°)
Tan −135° + Sec −225° + Sec(−315°)
E =−Sen 120° − Cos 210° + Sec(300°)
−Tan 135° + Sec 225° + Sec(315°)
E =−Sen 180° − 60° − Cos 270° − 60° + Sec(360° − 60°)
−Tan 180° − 45° + Sec 180° + 45° + Sec(360° − 45°)
E =−(+Sen60°) − −Sen60° + +Sec60°
−(−Tan45°) + −Sec45° + +Sec45°
E =2
1
∴ 𝐄 = 𝟐
Ejemplo:
RESOLUCIÓN:

REDUCCIÓN AL PRIMER CUADRANTE
Hallar: B =Sec α − 85π Csc α −
39π2
Tan α −73π2 Cos α − 73π
; para α =π
3
B =Sec 85π − α −Csc
39π2
− α
−Tan73π2
− α Cos 73π − α
B =−Secα − −Secα
− +Cotα −Cosα
B =−Sec
π3
Secπ3
−Cotπ3
−Cosπ3
B = −2 2
1
3
12
∴ 𝐁 = −𝟖 𝟑
Ejemplo:
RESOLUCIÓN:

TRIGONOMETRÍA
PROBLEMAS Y RESOLUCIÓN
MOMENTO DE PRACTICAR

REDUCCIÓN AL PRIMER CUADRANTE
7. Calcular: Cos60° + Cos600° + Cos6000° + ⋯+ Cos 6. 10n °, n ∈ ℤ
RESOLUCIÓN:
S = Cos60° + Cos600° + Cos6000° + ⋯+ Cos 6. 10n °
600 3601240
0
0 6240
0
06
S = Cos60° + Cos240° + Cos240° + ⋯+ Cos240°
Cos240° = Cos(180° + 60°)
Cos240° = −Cos60°
Cos240° = −1
2
(n-1) términos
S =1
2+ n − 1 −
1
2
∴ 𝐒 =𝟐 − 𝐧
𝟐

REDUCCIÓN AL PRIMER CUADRANTE
8. Simplificar:Sen 405π + α
Cos333π2 + α
+Cos 248π + α
Sen 323π2 − α
RESOLUCIÓN:
A =Sen 405π + α
Cos333π2 + α
+Cos 248π + α
Sen 323π2 − α
→ A =−Senα
−Senα+
Cosα
−Cosα
A = 1 + −1
∴ 𝐀 = 𝟎

REDUCCIÓN AL PRIMER CUADRANTE
9. Si: x + y = 4k − 1π
2; k ∈ ℤ Además: Cotx =
a − 2
a + 1Coty =
a − 4
a + 3
Calcular: W =1 − Senaπ + Cosx
1 − Cosπa+ Seny
RESOLUCIÓN:
x + y = 4k + 3π
2; k ∈ ℤ
x = 4k + 3π
2− y
Cotx = Cot 4k + 3π
2− y
Cotx = Tany
a − 2
a + 1=
a + 3
a − 4
a − 2 a − 4 = a + 3 a + 1
a2 − 6a + 8 = a2 + 4a + 3
10a = 5
a =1
2
W =1 − Sen
π2 + Cos 4k + 3
π2 − y
1 − Cos2π + Seny
W =1 − 1 + −Seny
1 − 1 + Seny
∴ 𝐖 = −𝟏

REDUCCIÓN AL PRIMER CUADRANTE
10. Si se tiene que “α” es un ángulo en posición normal del II cuadrante, mayor que dos vueltas y menor que tres vueltas, tal que:
Tanα = −Cot3π
8
RESOLUCIÓN:
4n + 1π
2< α < 2n + 1 π
n = 2
9π
2< α < 5π
α =9π
2+ x
α = 5π − y
Tanα = −Cot3π
8
Tan9π
2+ x = −Cot
3π
8
−Cotx = −Cot3π
8
x =3π
8
∴ 𝛂 =𝟑𝟗𝛑
𝟖

REDUCCIÓN AL PRIMER CUADRANTE16. Si se tiene que α es un ángulo del segundo cuadrante para el cual se tiene que Sen 270° − α =
1
1 + a2Calcule el valor de:
E =Sen 180° + α + Cos 1170° + α
Sen 990° − α
𝐂𝐋𝐀𝐕𝐄:𝐀

REDUCCIÓN AL PRIMER CUADRANTE17. Dada la igualdad:
Cotθ =Sen 2π − x
Cos3π2 + x
−Sen
π2+ x
Cos 4π + x
donde “θ” pertenece al cuarto cuadrante, calcule el valor de: E = 3 + 5 3Cosθ + Senθ
𝐂𝐋𝐀𝐕𝐄:𝐃

REDUCCIÓN AL PRIMER CUADRANTE
18. Dada la figura mostrada, calcule: E =3Cos α − β /6 + Cosα + Cosβ
3Sen α − β /3 + Senα + Senβ
X
Y
αβ
𝐂𝐋𝐀𝐕𝐄: 𝐄

REDUCCIÓN AL PRIMER CUADRANTE
19. Si: 4Senα = 3Tan293°. Cot247°, α ∈ 180°; 270°
Calcular: E = 7 Tanα − Cotα
𝐂𝐋𝐀𝐕𝐄: 𝐂

REDUCCIÓN AL PRIMER CUADRANTE
20. Calcular el valor de K:
n=1
50
Tannπ
2− α = KCot2α
Se conoce: Cotα − Tanα = 2Cot2α
𝐂𝐋𝐀𝐕𝐄:𝐀

TRIGONOMETRÍA
PRACTICA Y APRENDERÁS