Torsional and bending stresses in machine parts
48
Contents 1 Notations 2 2 Torsional Shear Stress (τ ) 3 3 Shafts in Series and Parallel 4 4 Bending Stress in Straight Beams (σ) 4 5 Bending Stress in Curved Beams (σ b ) 7 6 Principal Stresses and Principal Planes 9 7 Determination of Principal Stresses for a Member Subjected to Bi-axial Stress 9 8 Application of Principal Stresses in Designing Machine Members 9 9 Theories of Failure Under Static Load 10 10 Maximum Principal or Normal Stress Theory (Rankines Theory) 10 11 Maximum Shear Stress Theory (Guests or Trescas Theory) 10 12 Maximum Principal Strain Theory (Saint Venants Theory) 10 13 MaximumStrain Energy Theory (Haighs Theory) 11 14 Maximum Distortion Energy Theory (Hencky and Von Mises Theory) 11 15 Eccentric Loading - Direct and Bending Stresses Combined 11 16 Shear Stresses in Beams 13 17 Examples 14 17.1 Torsional Shear Stress ..................................................... 14 17.2 Shafts in Series and Parallel .................................................. 18 17.3 Bending Stress in Straight Beams ............................................... 20 17.4 Bending Stress in Curved Beams ............................................... 22 17.5 Determination of Principal Stresses for a Member Subjected to Bi-axial Stress ...................... 28 17.6 Theories of Failure Under Static Load ............................................ 32 17.7 Eccentric Loading - Direct and Bending Stresses Combined ................................ 37 17.8 Shear Stresses in Beams .................................................... 47 18 References 48 19 Contacts 48
-
Upload
mohamed-mohamed-el-sayed -
Category
Engineering
-
view
253 -
download
34
Transcript of Torsional and bending stresses in machine parts

Contents
1 Notations 2
2 Torsional Shear Stress (τ) 3
3 Shafts in Series and Parallel 4
4 Bending Stress in Straight Beams (σ) 4
5 Bending Stress in Curved Beams (σb) 7
6 Principal Stresses and Principal Planes 9
7 Determination of Principal Stresses for a Member Subjected to Bi-axial Stress 9
8 Application of Principal Stresses in Designing Machine Members 9
9 Theories of Failure Under Static Load 10
10 Maximum Principal or Normal Stress Theory (Rankines Theory) 10
11 Maximum Shear Stress Theory (Guests or Trescas Theory) 10
12 Maximum Principal Strain Theory (Saint Venants Theory) 10
13 MaximumStrain Energy Theory (Haighs Theory) 11
14 Maximum Distortion Energy Theory (Hencky and Von Mises Theory) 11
15 Eccentric Loading - Direct and Bending Stresses Combined 11
16 Shear Stresses in Beams 13
17 Examples 1417.1 Torsional Shear Stress . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1417.2 Shafts in Series and Parallel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1817.3 Bending Stress in Straight Beams . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2017.4 Bending Stress in Curved Beams . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2217.5 Determination of Principal Stresses for a Member Subjected to Bi-axial Stress . . . . . . . . . . . . . . . . . . . . . . 2817.6 Theories of Failure Under Static Load . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3217.7 Eccentric Loading - Direct and Bending Stresses Combined . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3717.8 Shear Stresses in Beams . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
18 References 48
19 Contacts 48

1 Notations
• τ = Torsional shear stress induced at the outer surface of the shaft or maximum shear stress.
• r = Radius of the shaft.
• T = Torque or twisting moment.
• J = Second moment of area of the section about its polar axis or polar moment of inertia.
• C = Modulus of rigidity for the shaft material.
• l = Length of the shaft.
• θ = Angle of twist in radians on a length l.
• T = Torque transmitted in N-m.
• w = Angular speed in rad/s.
• M = Bending moment acting at the given section about the centroidal axis.
• σ = Bending stress.
• I = Second moment of inertia of the cross-section about the neutral axis.
• y = Distance from the neutral axis to the extreme fiber (for straight beams).= Distance from the neutral axis to the fiber under consideration. It is positive for the distances towardsthe center of curvature and negative for the distances away from the center of curvature(for curved beams).
• E = Young’s modulus of the material of the beam.
• R = Radius of curvature of the centroidal axis of the beam.
• Z = Section modulus.
• Rn = Radius of curvature of the neutral axis.
• e = Distance from the centroidal axis to the neutral axis = RRn.
• A = Area of cross-section.
• σb = Bending stress.
• yi = Distance from the neutral axis to the inside fiber = RnRi.
• Ri = Radius of curvature of the inside fiber.
• yo = Distance from the neutral axis to the outside fiber = RoRn.
• Ro = Radius of curvature of the outside fiber.
• σc = Compressive stress.
• σt = Tensile stress due to direct load and bending.
• τ = Shear stress due to torsion.
• σyt = Yield point stress in tension as determined from simple tension test.
• σu = Ultimate stress.
• τmax = Maximum shear stress in a bi-axial stress system.
• τyt = Shear stress at yield point as determined from simple tension test.
• F.S. = Factor of safety.
• σt1 and σt2 = Maximum and minimum principal stresses in a bi-axial stress system.
• ε = Strain at yield point as determined from simple tension test.
• 1/m = Poissons ratio.
• E = Youngs modulus
• yc and yt = Distances of the extreme fibers on the compressive and tensile sides, from the neutral axisrespectively.
• F = Vertical shear force acting on the section.
• b = Width of the section under consideration.
• y = Distance between the C.G. of the area and the neutral axis.

2 Torsional Shear Stress (τ)
When a machine member is subjected to the action of two equal and opposite couples acting in parallel planes(or torque or twisting moment), then the machine member is said to be subjected to torsion. The stress setup by torsion is known as torsional shear stress. It is zero at the centroidal axis and maximum at the outersurface.
τ
r=T
J=Cθ
l
Figure 1: Torsional shear stress.
Assumptions:
1. The material of the shaft is uniform throughout.
2. The twist along the length of the shaft is uniform.
3. The normal cross-sections of the shaft, which were plane and circular before twist, remain plane and circularafter twist.
4. All diameters of the normal cross-section which were straight before twist, remain straight with theirmagnitude unchanged, after twist.
5. The maximum shear stress induced in the shaft due to the twisting moment does not exceed its elasticlimit value.
Notes:
1. Since the torsional shear stress on any cross-section normal to the axis is directly proportional to thedistance from the center of the axis, therefore the torsional shear stress at a distance x from the center ofthe shaft is given by
τxx
=τ
r
2.T
J=τ
r⇒ T = τ
J
rFor a solid shaft of diameter (d), the polar moment of inertia,
J = JXX + JY Y =π
64d4 +
π
64d4 =
π
32d4
∴ T = τπ
32d4
2
d=
π
16τ d3
In case of a hollow shaft with external diameter (do) and internal diameter (di), the polar moment ofinertia,
J =π
32
[d4o − d4i
]and r =
do2
∴ T = τπ
32
[d4o − d4i
] 2
d=
π
16τ
[d4o − d4ido
]=
π
16τ d3o
(1− k4
)3. The expression (C x J) is called torsional rigidity of the shaft.
4. The strength of the shaft means the maximum torque transmitted by it. Therefore, in order to design ashaft for strength, the above equations are used. The power transmitted by the shaft (in watts) is given by
P =2πNT
60= Tw

3 Shafts in Series and Parallel
When two shafts of different diameters are connected together to form one shaft, it is then known as compositeshaft. Total angle of twist,
θ = θ1 + θ2 =T l1C1J1
+T l2C2J2
If the shafts are made of the same material, then C1 = C2 = C.
θ =T l1CJ1
+T l2CJ2
=T
C
[l1J1
+l2J2
]
Figure 2: Shafts in series and parallel.
In such cases, the angle of twist is same for both the shafts, i.e.
θ1 = θ2 ⇒T1l1C1J1
=T2l2C2J2
⇒ T1T2
=l2l1
C1
C2
J1J2
T = T1 + T2
If the shafts are made of the same material, then C1 = C2.
∴T1T2
=l2l1
J1J2
4 Bending Stress in Straight Beams (σ)
The following assumptions are usually made while deriving the bending formula.
1. The material of the beam is perfectly homogeneous (i.e. of the same material throughout) and isotropic(i.e. of equal elastic properties in all directions).
2. The material of the beam obeys Hookes law.
3. The transverse sections (i.e. BC or GH) which were plane before bending, remain plane after bendingalso.
4. Each layer of the beam is free to expand or contract, independently, of the layer, above or below it.
5. The Young’s modulus (E) is the same in tension and compression.
6. The loads are applied in the plane of bending.
Figure 3: Shafts in series and parallel.

M
I=
σ
y=E
R⇒ σ = y
E
R
σ =M
Iy =
M
I/y=M
Z
Notes:
1. The neutral axis of a section always passes through its centroid.
2. In case of symmetrical sections such as circular, square or rectangular, the neutral axis passes throughits geometrical center and the distance of extreme fiber from the neutral axis is y = d/2, where d is thediameter in case of circular section or depth in case of square or rectangular section.
3. In case of unsymmetrical sections such as L-section or T-section, the neutral axis does not pass through itsgeometrical center. In such cases, first of all the centroid of the section is calculated and then the distanceof the extreme fibers for both lower and upper side of the section is obtained. Out of these two values, thebigger value is used in bending equation.


5 Bending Stress in Curved Beams (σb)
We have seen in the previous article that for the straight beams, the neutral axis of the section coincides withits centroidal axis and the stress distribution in the beam is linear. But in case of curved beams, the neutralaxis of the cross-section is shifted towards the center of curvature of the beam causing a non-linear (hyperbolic)distribution of stress. The application of curved beam principle is used in crane hooks, chain links and framesof punches, presses, planers etc.
Figure 4: Bending stress in a curved beam.
σb =M
Ae
(y
Rn − y
)Notes:
1. The bending stress in the curved beam is zero at a point other than at the centroidal axis.
2. If the section is symmetrical such as a circle, rectangle, I-beam with equal flanges, then the maximumbending stress will always occur at the inside fiber.
3. If the section is unsymmetrical, then the maximum bending stress may occur at either the inside fiber orthe outside fiber. The maximum bending stress at the inside fiber is given by
σbi =MyiAeRi
The maximum bending stress at the outside fiber is given by
σbo =MyoAeRo
It may be noted that the bending stress at the inside fiber is tensile while the bending stress at the outsidefiber is compressive.
4. If the section has an axial load in addition to bending, then the axial or direct stress (σd) must be addedalgebraically to the bending stress, in order to obtain the resultant stress on the section. Resultant stress,
σ = σd ± σb


6 Principal Stresses and Principal Planes
It may be noted that out of these three direct stresses, one will be maximum and the other will be minimum.These perpendicular planes which have no shear stress are known as principal planes and the direct stressesalong these planes are known as principal stresses.The planes on which the maximum shear stress act areknown as planes of maximum shear.
7 Determination of Principal Stresses for a Member Subjected to Bi-axial Stress
Maximum principal (or normal) stress,
σt1 =σ1 + σ2
2+
1
2
√(σ1 − σ2)2 + 4τ 2
and minimum principal (or normal) stress,
σt1 =σ1 + σ2
2− 1
2
√(σ1 − σ2)2 + 4τ 2
and the inclination of principal planes,
tan 2θ =2τ
σ1 − σ2The planes of maximum shear stress are at right angles to each other and are inclined at 45o to the principalplanes. The maximum shear stress is given by one-half the algebraic difference between the principalstresses, i.e.
τmax =σt1 − σt2
2=
1
2
√(σ1 − σ2)2 + 4τ 2
Notes:
1. When a member is subjected to direct stress in one plane accompanied by a simple shear stress , then theprincipal stresses are obtained by substituting σ2 = 0
σt1 =σ12
+1
2
√(σ1)
2 + 4τ 2
σt2 =σ12− 1
2
√(σ1)
2 + 4τ 2
τmax =σt12
=1
2
√(σ1)
2 + 4τ 2
2. In the above expression of σt2, the value of 12
√(σ1)
2 + 4τ 2 is more than σ12
Therefore the nature of σt2 will
be opposite to that of σt1, i.e. if σt1 is tensile then σt2 will be compressive and vice-versa.
8 Application of Principal Stresses in Designing Machine Members
There are many cases in practice, in which machine members are subjected to combined stresses due to simul-taneous action of either tensile or compressive stresses combined with shear stresses. In many shafts such aspropeller shafts, C-frames etc., there are direct tensile or compressive stresses due to the external force andshear stress due to torsion, which acts normal to direct tensile or com-pressive stresses. The shafts like crankshafts, are subjected simultaneously to torsion and bending. In such cases, the maximum principal stresses, dueto the combination of tensile or compressive stresses with shear stresses may be obtained.The results obtained in the previous article may be written as follows:
1. Maximum tensile stress,
σt(max) =σt2
+1
2
√(σt)
2 + 4τ 2
2. Maximum compressive stress,
σc(max) =σc2
+1
2
√(σc)
2 + 4τ 2
3. Maximum shear stress,
τmax =1
2
√(σt)
2 + 4τ 2

9 Theories of Failure Under Static Load
The principal theories of failure for a member subjected to bi-axial stress are as follows:
1. Maximum principal (or normal) stress theory (also known as Rankines theory).
2. Maximum shear stress theory (also known as Guests or Trescas theory).
3. Maximum principal (or normal) strain theory (also known as Saint Venant theory).
4. Maximum strain energy theory (also known as Haighs theory).
5. Maximum distortion energy theory (also known as Hencky and Von Mises theory).
Since ductile materials usually fail by yielding i.e. when permanent deformations occur in the material andbrittle materials fail by fracture, therefore the limiting strength for these two classes of materials is normallymeasured by different mechanical properties. For ductile materials, the limiting strength is the stress at yieldpoint as determined from simple tension test and it is, assumed to be equal in tension or compression. Forbrittle materials, the limiting strength is the ultimate stress in tension or compression.
10 Maximum Principal or Normal Stress Theory (Rankines Theory)
According to this theory, the failure or yielding occurs at a point in a member when the maximum principal ornormal stress in a bi-axial stress system reaches the limiting strength of the material in a simple tension test.Since the limiting strength for ductile materials is yield point stress and for brittle materials (which do nothave well defined yield point) the limiting strength is ultimate stress, therefore according to the above theory,taking factor of safety (F.S.) into consideration, the maximum principal or normal stress (σt1) in a bi-axialstress system is given by
σt1 =σytF.S.
, for ductile materials
=σuF.S.
, for brittle materials
Since the maximum principal or normal stress theory is based on failure in tension or compression and ignoresthe possibility of failure due to shearing stress, therefore it is not used for ductile materials. However, for brittlematerials which are relatively strong in shear but weak in tension or compression, this theory is generally used.
11 Maximum Shear Stress Theory (Guests or Trescas Theory)
According to this theory, the failure or yielding occurs at a point in a member when the maximum shear stressin a bi-axial stress system reaches a value equal to the shear stress at yield point in a simple tension test.Mathematically,
τmax =τytF.S.
Since the shear stress at yield point in a simple tension test is equal to one-half the yield stress in tension,therefore the equation may be written as
τmax =τyt
2 x F.S.
12 Maximum Principal Strain Theory (Saint Venants Theory)
According to this theory, the failure or yielding occurs at a point in a member when the maximum principal(or normal) strain in a bi-axial stress system reaches the limiting value of strain (i.e. strain at yield point) asdetermined from a simple tensile test. The maximum principal (or normal) strain in a bi-axial stress system isgiven by
εmax =σt1E− σt2mE
∴ According to the above theory,
εmax =σt1E− σt2mE
= ε =σyt
E x F.S.
σt1 −σt2m
=σytF.S.
This theory is not used, in general, because it only gives reliable results in particular cases.

13 MaximumStrain Energy Theory (Haighs Theory)
According to this theory, the failure or yielding occurs at a point in a member when the strain energy per unitvolume in a bi-axial stress system reaches the limiting strain energy (i.e. strain energy at the yield point ) perunit volume as determined from simple tension test.We know that strain energy per unit volume in a bi-axial stress system,
U1 =1
2E
[(σt1)
2 + (σt2)2 − 2σt1σt2
m
]and limiting strain energy per unit volume for yielding as determined from simple tension test,
U2 =1
2E
( σytF.S.
)2According to the above theory,
U1 = U2
∴1
2E
[(σt1)
2 + (σt2)2 − 2σt1σt2
m
]=
1
2E
( σytF.S.
)2(σt1)
2 + (σt2)2 − 2σt1σt2
m=
( σytF.S.
)2This theory may be used for ductile materials.
14 Maximum Distortion Energy Theory (Hencky and Von Mises Theory)
According to this theory, the failure or yielding occurs at a point in a member when the distortion strain energy(also called shear strain energy) per unit volume in a bi-axial stress system reaches the limiting distortion energy(i.e. distortion energy at yield point) per unit volume as determined from a simple tension test. Mathematically,the maximum distortion energy theory for yielding is expressed as
(σt1)2 + (σt2)
2 − 2σt1σt2 =( σytF.S.
)2This theory is mostly used for ductile materials in place of maximum strain energy theory.Note: The maximum distortion energy is the difference between the total strain energy and the strain energydue to uniform stress.
15 Eccentric Loading - Direct and Bending Stresses Combined
An external load, whose line of action is parallel but does not coincide with the centroidal axis of the machinecomponent, is known as an eccentric load. The distance between the centroidal axis of the machine componentand the eccentric load is called eccentricity and is generally denoted by e. The examples of eccentric loading,from the subject point of view, are C-clamps, punching machines, brackets, offset connecting links etc.The magnitude of this direct compressive stress is given by
σo =P1
Aor
P
A
The forces P1 and P2 will form a couple equal to P x e which will cause bending stress. This bending stressis compressive at the edge AB and tensile at the edge CD. The magnitude of bending stress at the edge AB isgiven by
σb =P e ycI
(compressive)
and bending stress at the edge CD,
σb =P e ytI
(tensile)
According to the principle of superposition, the maximum or the resultant compressive stress at the edge AB,
σc =P e ycI
+P
A=M
Z+P
A= σb + σo

and the maximum or resultant tensile stress at the edge CD,
σt =P e ytI− P
A=M
Z− P
A= σb − σo
Figure 5: Eccentric loading.
Notes:
1. When the member is subjected to a tensile load,then the above equations may be used by inter-changing the subscripts c and t.
2. When the direct stress σo is greater than or equalto bending stress σb , then the compressive stressshall be present all over the cross-section.
3. When the direct stress σo is less than the bendingstress σb, then the tensile stress will occur in theleft hand portion of the cross-section and com-pressive stress on the right hand portion of thecross-section.In case the eccentric load acts with eccentricityabout two axes, then the total stress at the ex-treme fiber
=P
A± P ex x
IXX± P ey y
IY Y
Figure 6: Eccentric load with eccentricity about two axes.

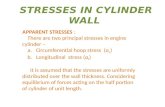
16 Shear Stresses in Beams
It has been observed that the effect of the shear stress, as compared to the bending stress, is quite negligibleand is of not much importance. But, sometimes, the shear stress at a section is of much importance in thedesign. It may be noted that the shear stress in a beam is not uniformly distributed over the cross-section butvaries from zero at the outer fibers to a maximum at the neutral surface.
Figure 7: Shear stress in rectangular, circular and I-section beam.
The shear stress at any section acts in a plane at right angle to the plane of the bending stress and its value isgiven by
τ − F
IbA y
The following values of maximum shear stress for different cross-section of beams may be noted :
1. For a beam of rectangular section, the shear stress at a distance y from neutral axis is given by
∵ I =bh3
12
∴ τ =F
2I
(h2
4− y2
)=
3F
2bh
(h2 − 4y2
)and maximum shear stress,
∵ y =h
2
∴ τmax =3F
2bh
∵ τ(average) =F
Area=F
bh∴ τmax = 1.5τ(average)

2. or a beam of circular section, the shear stress at a distance y from neutral axis is given by
τ =F
3I
(d2
4− y2
)=
16F
3πd4(d2 − 4y2
)and the maximum shear stress,
∵ y =h
2
∴ τmax =4F
3π4d2
∵ τ(average) =F
Area=
Fπ4d2
∴ τmax =4
3τ(average)
3. For a beam of I-section, the maximum shear stress occurs at the neutral axis and is given by
τmax =F
Ib
[B
8
(H2 − h2
)+bh2
8
]Shear stress at the joint of the web and the flange
=F
8I
(H2 − h2
)and shear stress at the junction of the top of the web and bottom of the flange
=F
8I
B
b
(H2 − h2
)17 Examples
17.1 Torsional Shear Stress




17.2 Shafts in Series and Parallel


17.3 Bending Stress in Straight Beams


17.4 Bending Stress in Curved Beams






17.5 Determination of Principal Stresses for a Member Subjected to Bi-axial Stress




17.6 Theories of Failure Under Static Load





17.7 Eccentric Loading - Direct and Bending Stresses Combined










17.8 Shear Stresses in Beams

18 References
1. R.S. KHURMI, J.K. GUPTA, A Textbook Of Machine Design
19 Contacts