The Shakura-Sunyaev viscosity prescription with variableα r · toplanetary disks, Fromang et al....
21
arXiv:1211.0526v1 [astro-ph.HE] 2 Nov 2012 Mon. Not. R. Astron. Soc. 000, 000–000 (0000) Printed 5 November 2012 (MN L A T E X style file v2.2) The Shakura-Sunyaev viscosity prescription with variable α(r) Robert F. Penna 1 ⋆ , Aleksander S adowski 1⋆ , Akshay K. Kulkarni, Ramesh Narayan 1 ⋆ 1 Harvard-Smithsonian Center for Astrophysics, 60 Garden Street, Cambridge, MA 02138, USA 5 November 2012 ABSTRACT Almost all hydrodynamic accretion disk models parametrize viscosity with the dimen- sionless parameter α. There is no detailed model for α, so it is usually taken to be a constant. However, global simulations of magnetohydrodynamic disks find that α varies with distance from the central object. Also, Newtonian simulations tend to find smaller α’s than general relativistic simulations. We seek a one-dimensional model for α that can reproduce these two observations. We are guided by data from six general relativistic magnetohydrodynamic ac- cretion disk simulations. The variation of α in the inner, laminar regions of the flow results from stretching of mean magnetic field lines by the flow. The variation of α in the outer, turbulent regions results from the dependence of the magnetorotational instability on the di- mensionless shear rate. We give a one-dimensional prescription for α(r) that captures these two effects and reproduces the radial variation of α observed in the simulations. For thin disks, the prescription simplifies to the formula α(r) = 0.025 q(r)/1.5 6 , where the shear parameter, q(r), is an analytical function of radius in the Kerr metric. The coefficient and exponent are inferred from our simulations and will change as better simulation data becomes available. We conclude that the α-viscosity prescription can be extended to the radially varying α’s ob- served in simulations. It is possible that Newtonian simulations find smaller α’s than general relativistic simulations because the shear parameter is lower in Newtonian flows. Key words: accretion, accretion discs, black hole physics, hydrodynamics, (magnetohydro- dynamics) MHD, gravitation 1 INTRODUCTION Accretion disk magnetic fields and turbulence act as a large scale viscosity, draining angular momentum and energy from accreting gas. The magnitude of this viscosity is uncertain, which adds a free parameter to accretion disk models. For example, Pringle & Rees (1972) leave the ratio of the disk’s radial velocity to its circular velocity as a free parameter. They call this ratio y/100 and esti- mate y ∼ 1. They note that y might be radius dependent and that a strong radial dependence could change qualitative features of the disk. However, other important features of the disk, such as its lu- minosity, depend weakly or not at all on y, so progress is possible without a detailed model for y. Shakura & Sunyaev (1973) parametrized the viscosity with α, the ratio of stress to pressure. It is related to Pringle and Rees’s y by y = 100α(h/r) 2 , where h/r is the disk opening angle. 1 They an- ticipated that α will be a function of radius, citing experiments of ⋆ E-mail: [email protected] (RFP), asad- [email protected] (AS), [email protected] (RN), 1 Pringle & Rees (1972) leave h/r a free parameter which they suppose to be ∼ 0.05. Shakura & Sunyaev (1973) use hydrostatic equilibrium to solve for h/r self-consistently. turbulence in Taylor-Coutte flow, flow between rotating cylinders (Taylor 1936). These experiments show that the torque exerted by a turbulent flow on the cylinders depends on the rotation rate of the cylinders and the separation between them. The torque in the exper- iment is related to α, so α should depend on accretion flow prop- erties that vary with radius. The analogy is too rough to produce a quantitative model, so they assume α is a constant for simplicity. The most significant theoretical breakthrough towards an un- derstanding of α has been the realization that the magnetoro- tational instability (MRI) can drive turbulence in ionized accre- tion disks (Velikhov 1959; Chandrasekhar 1960; Balbus & Hawley 1991, 1998). A weak seed magnetic field and a radially decreasing angular velocity profile are all that are required to trigger the insta- bility and both are present in disks. This makes it possible to run magnetohydrodynamic (MHD) disk simulations without using the α-viscosity prescription. Nonetheless, because of its relative simplicity, the α- viscosity prescription has not dimmed in importance. Over the past year, more than 300 papers cited the pioneering work of Shakura & Sunyaev (1973) and more than 1000 papers made ref- erence to some disk solution based on the α-viscosity prescription (such as the relativistic thin disk of Novikov & Thorne (1973) or the advection dominated accretion flow (ADAF) of Narayan & Yi c 0000 RAS
Transcript of The Shakura-Sunyaev viscosity prescription with variableα r · toplanetary disks, Fromang et al....

arX
iv:1
211.
0526
v1 [
astr
o-ph
.HE
] 2
Nov
201
2Mon. Not. R. Astron. Soc.000, 000–000 (0000) Printed 5 November 2012 (MN LATEX style file v2.2)
The Shakura-Sunyaev viscosity prescription with variable α(r)
Robert F. Penna1 ⋆, Aleksander Sadowski1⋆, Akshay K. Kulkarni, Ramesh Narayan1⋆1Harvard-Smithsonian Center for Astrophysics, 60 Garden Street, Cambridge, MA 02138, USA
5 November 2012
ABSTRACT
Almost all hydrodynamic accretion disk models parametrizeviscosity with the dimen-sionless parameterα. There is no detailed model forα, so it is usually taken to be a constant.However, global simulations of magnetohydrodynamic disksfind thatα varies with distancefrom the central object. Also, Newtonian simulations tend to find smallerα’s than generalrelativistic simulations. We seek a one-dimensional modelfor α that can reproduce these twoobservations. We are guided by data from six general relativistic magnetohydrodynamic ac-cretion disk simulations. The variation ofα in the inner, laminar regions of the flow resultsfrom stretching of mean magnetic field lines by the flow. The variation of α in the outer,turbulent regions results from the dependence of the magnetorotational instability on the di-mensionless shear rate. We give a one-dimensional prescription for α(r) that captures thesetwo effects and reproduces the radial variation ofα observed in the simulations. For thin disks,the prescription simplifies to the formulaα(r) = 0.025
[
q(r)/1.5]6, where the shear parameter,
q(r), is an analytical function of radius in the Kerr metric. Thecoefficient and exponent areinferred from our simulations and will change as better simulation data becomes available.We conclude that theα-viscosity prescription can be extended to the radially varying α’s ob-served in simulations. It is possible that Newtonian simulations find smallerα’s than generalrelativistic simulations because the shear parameter is lower in Newtonian flows.
Key words: accretion, accretion discs, black hole physics, hydrodynamics, (magnetohydro-dynamics) MHD, gravitation
1 INTRODUCTION
Accretion disk magnetic fields and turbulence act as a large scaleviscosity, draining angular momentum and energy from accretinggas. The magnitude of this viscosity is uncertain, which adds a freeparameter to accretion disk models. For example, Pringle & Rees(1972) leave the ratio of the disk’s radial velocity to its circularvelocity as a free parameter. They call this ratioy/100 and esti-matey ∼ 1. They note thaty might be radius dependent and thata strong radial dependence could change qualitative features of thedisk. However, other important features of the disk, such asits lu-minosity, depend weakly or not at all ony, so progress is possiblewithout a detailed model fory.
Shakura & Sunyaev (1973) parametrized the viscosity withα,the ratio of stress to pressure. It is related to Pringle and Rees’syby y = 100α(h/r)2, whereh/r is the disk opening angle.1 They an-ticipated thatα will be a function of radius, citing experiments of
⋆ E-mail: [email protected] (RFP), [email protected] (AS), [email protected] (RN),1 Pringle & Rees (1972) leaveh/r a free parameter which they suppose tobe∼ 0.05. Shakura & Sunyaev (1973) use hydrostatic equilibrium tosolvefor h/r self-consistently.
turbulence in Taylor-Coutte flow, flow between rotating cylinders(Taylor 1936). These experiments show that the torque exerted bya turbulent flow on the cylinders depends on the rotation rateof thecylinders and the separation between them. The torque in theexper-iment is related toα, soα should depend on accretion flow prop-erties that vary with radius. The analogy is too rough to produce aquantitative model, so they assumeα is a constant for simplicity.
The most significant theoretical breakthrough towards an un-derstanding ofα has been the realization that the magnetoro-tational instability (MRI) can drive turbulence in ionizedaccre-tion disks (Velikhov 1959; Chandrasekhar 1960; Balbus & Hawley1991, 1998). A weak seed magnetic field and a radially decreasingangular velocity profile are all that are required to triggerthe insta-bility and both are present in disks. This makes it possible to runmagnetohydrodynamic (MHD) disk simulations without usingtheα-viscosity prescription.
Nonetheless, because of its relative simplicity, theα-viscosity prescription has not dimmed in importance. Over thepast year, more than 300 papers cited the pioneering work ofShakura & Sunyaev (1973) and more than 1000 papers made ref-erence to some disk solution based on theα-viscosity prescription(such as the relativistic thin disk of Novikov & Thorne (1973) orthe advection dominated accretion flow (ADAF) of Narayan & Yi
c© 0000 RAS

2 R. F. Penna, A. S. Sadowski, A. K. Kulkarni, & R. Narayan
(1994)). However, despite its interest, there is still no widely ac-cepted model for the size or shape ofα. In applications, it istypically assumed to be a constant between 0.01 and 0.1 (e.g.,Gou et al. 2011).
There are two varieties of MHD simulations, local andglobal, and both provide hints about the size and shape ofα.A standard setup for a local simulation is a box of weaklymagnetized fluid in the shearing sheet approximation (e.g.,Hawley & Balbus 1991; Brandenburg et al. 1995; Hawley et al.1995, 1996; Stone & Balbus 1996; Brandenburg 2001; Sano et al.2004). The dimensions of the box are typically a few disk scaleheights. The earliest global simulations of MRI turbulent disksused a Newtonian potential (Armitage 1998; Matsumoto 1999;Hawley 2000; Machida et al. 2000) and, later, a pseudo-Newtonianpotential (Hawley & Krolik 2001). The first general relativisticglobal simulations were carried out by De Villiers et al. (2003).A standard setup for global simulations is a torus of fluid in hy-drostatic equilibrium, threaded with a weak magnetic field (e.g.,De Villiers et al. 2003). In local and global simulations, differentialrotation triggers the MRI and drives turbulence. When the simula-tion reaches a quasi-steady state, one can compute the ratioof stressto pressure and so measureα. Local simulations focus on resolv-ing small scale physics, such as saturation of the MRI, whileglobalsimulations attempt a complete portrait of the accretion disk.
Global simulations have hinted at the shape ofα. Penna et al.(2010) and Penna et al. (2012b) presented general relativistic MHD(GRMHD) simulations of MRI turbulent disks in the Kerr met-ric, the spacetime of a spinning black hole. They confirmed thatthe relativisticα-disk model of Novikov & Thorne (1973) givesa good description of the simulation data. This was partly mo-tivated by earlier suggestions that magnetic stresses at the inneredges of MHD disks invalidate the assumptions ofα-disk mod-els (e.g., Krolik 1999; Agol & Krolik 2000). The GRMHD simula-tions produced luminosity inside the innermost stable circular or-bit (ISCO), where the Novikov & Thorne (1973) model is entirelydark, but it was a modest contribution to the total luminosity of thedisk (on the order of a few percent; Kulkarni et al. 2011). Later,Penna et al. (2012b) generalized the Novikov & Thorne (1973)model to self-consistently incorporate nonzero luminosity insidethe ISCO, bringing it closer to the GRMHD simulations.
Penna et al. (2010) and Penna et al. (2012b) measured theshape ofα. For accretion onto a non-spinning black hole, theyfoundα is small at the event horizon, increases to a maximum nearthe photon orbit, declines to∼ 0.06 near the ISCO, and then contin-ues to decline, albeit more slowly (see, e.g., Figure 7 of Penna et al.2012b). In a completely different context, MHD simulations of pro-toplanetary disks, Fromang et al. (2011) found a radially varying αwith similar shape. However, the overall size of theirα was over anorder of magnitude lower, peaking at 0.013 and declining to below0.002.
The value of α is notoriously difficult to pin down(Pessah et al. 2007). Local simulations find thatα is stronglyaffected by grid scale dissipation as well as stratification(Lesur & Longaretti 2007; Fromang & Papaloizou 2007;Simon & Hawley 2009; Davis et al. 2010). In global and lo-cal simulations,α depends non-monotonically on resolution at allbut the highest resolutions (Sorathia et al. 2012). In models withnet magnetic flux,α scales with increasing flux (Hawley et al.1995; Sano et al. 2004; Pessah et al. 2007). Finally,α depends onthe initial magnetic field geometry and strength (e.g., Sorathia et al.2012).
A combination of these effects can probably explain some
of the discrepancy between theα values found by Penna et al.(2012b) and Fromang et al. (2011) . The former employed an ini-tially poloidal magnetic field with initial gas-to-magnetic pressureratio β = 100 and resolution 256× 64× 32 in (r, θ, φ). The lateremployed an initially toroidal field with initialβ = 25 and resolu-tion 512× 256× 256. Neither had explicit dissipation or net mag-netic flux. Initially toroidal fields tend to beget smallerα’s thaninitially poloidal fields, butα also tends to be inversely related tothe initial β. The scaling ofα with resolution is non-monotonic(Sorathia et al. 2012). It is not clear whether these effects are largeenough to explain why theα’s measured from the general relativis-tic simulations are over an order of magnitude larger than the α’smeasured from the Newtonian simulations.
In this paper, we present a one-dimensional model for theshape ofα and we show that relativistic corrections enhance theα’s measured in GRMHD simulations relative to Newtonian simu-lations. The one-dimensional model has two components. Thefirstcomponent is generated by large-scale, mean magnetic fieldsandis based on the model of Gammie (1999). It dominates in the innerregions of accretion flows, where plunging gas stretches andam-plifies the frozen-in magnetic field. The second, “turbulent,” com-ponent describes the dependence ofα on the shear rate of the flow.The dependence ofα on the shear rate in turbulent flows was ear-lier emphasized by Godon (1995), Abramowicz et al. (1996), andPessah et al. (2008). Combining the mean field and turbulent com-ponents yields a one-dimensional model for the shape ofα.
We use this model to fit the profiles ofα versus radius ex-tracted from six GRMHD simulations. The simulations describethin disks accreting onto a non-spinning black hole at two differ-ent resolutions, a thin disk and a thick disk accreting onto aspin-ning black hole (with dimensionless spin parametera/M = 0.7),and thick disks with two different initial magnetic field topologiesaccreting onto a nonspinning black hole. We show how the radialvariation ofα changes the structure ofα-disk solutions. Finally, wenote that the enhancement ofα seen in GRMHD simulations rela-tive to Newtonian simulations can be explained by the dependenceof α on shear rate.
There is another reasonα is interesting which we have notyet mentioned. Turbulent fluids can be complicated. They aredis-ordered solutions of nonlinear equations that require great effort tosolve numerically. And yet, from fully developed turbulence, sim-ple scaling laws emerge with apparently universal properties. Forexample, shearing box simulations of MRI-driven turbulence witha Keplerian rotation profile always find that the ratio of Maxwellstress to Reynolds stress is a constant,≈ 4 (Pessah et al. 2006b).The same ratio appears independently of the magnitude or geom-etry of the magnetic field. It seems only to depend (in a simpleway) on the shear rate of the flow (Hawley et al. 1999; Pessah etal.2006b). Similarly, the viscosity parameter,α, obeys a remarkablescaling law:αβ ≈ 1/2, whereβ is the gas-to-magnetic pressure ra-tio (Blackman et al. 2008; Guan et al. 2009; Sorathia et al. 2012).Formulas this simple should have simple explanations; theyshouldnot just appear at the end of large numerical calculations, as if bycoincidence. We hope that clarifying some of the physics underly-ing α will improve our understanding of these scaling laws.
The paper is organized as follows. In§2, we give an overviewof physics in the Kerr metric. In§3, we describe our one-dimensional model forα(r). The GRMHD simulations are de-scribed in§§4-6; we give a broad overview of the simulations in§4, analyze the two fiducial simulations in§5, and analyze the re-maining four simulations in§6. In§7, we show how a radially vary-
c© 0000 RAS, MNRAS000, 000–000

Shakura-Sunyaev viscosity prescription 3
ing α affects the structure ofα-disk solutions. We conclude with asummary and discussion in§8.
2 PRELIMINARIES
For our investigation ofα, we will need to compute the angular ve-locity, shear rate, and epicyclic frequency of an accretinggas in theKerr metric, so we review their definition here. This also helps toestablish notation. As an intermediate step, we discuss thetransfor-mation between the Boyer-Lindquist and fluid frames.
The Kerr metric in Boyer-Lindquist coordinates is
ds2= − (1− 2Mr/Σ) dt2 −
(
4Mar sin2 θ/Σ)
dtdφ + (Σ/∆) dr2
+
(
r2+ a2+ 2Ma2r sin2 θ/Σ
)
sin2 θdφ2. (1)
HereM is the mass of the black hole,a is its angular momentum perunit mass (06 a 6 M), and the functions∆, Σ, andA are definedby
∆ ≡ r2 − 2Mr + a2, (2)
Σ ≡ r2+ a2 cos2 θ, (3)
A ≡(
r2+ a2)2− a2∆ sin2 θ. (4)
The accreting, magnetized gas is characterized by its four-velocity,uµ, density,ρ, pressure,p, and internal energy,u, and by the elec-tromagnetic field,Fµν. We setG = c = 1.
The angular velocity of the gas is
Ω ≡ dφdt=
uφ
ut. (5)
Circular equatorial geodesics haveΩ = M1/2/(
r3/2+ aM1/2
)
, andthe motion of a geometrically thin disk is well approximatedbycircular geodesics outside the ISCO. However, motion inside theISCO and the motion of thick disks are not Keplerian, so we leaveΩ unspecified for now.
2.1 Inertial Fluid Frame
We would like to evaluate the shear rate and epicyclic frequency inthe inertial fluid frame, rather than the Boyer-Lindquist, ZAMO, orany other frame, because the physics is simplest there. Also, this isthe frame whereα is defined. In this frame, the equivalence prin-ciple lets us ignore gravitational forces at the center of the fluidparcel we are following. Tidal forces and other gravitational forcesthat become important over large distances will not concernus be-cause shear rate and epicyclic frequency are local measurements.
Measurements in the Boyer-Lindquist frame,(dt, dr, dθ, dφ),are related to measurements in the inertial fluid frame,(
ωt, ωr, ωθ, ωφ)
, by the the transformation matrixωµµ
(Krolik et al.2005; Beckwith et al. 2008; Kulkarni et al. 2011):
ωµ
t=
(
ut, ur , uθ, uφ)
, (6)
ωµ
r =s
N1
(
urut,1+ urur + uθuθ,0, uru
φ)
, (7)
ωµ
θ=
1N2
(
uθut, uθur , 1+ uθuθ, uθuφ)
, (8)
ωµ
φ=
1N3
(−ℓ,0, 0,1) , (9)
where,
s = −C0/ |C0| , ℓ = uφ/ut,
N1 = grr
√
gttC21 + grrC2
0 + gφφC22 + 2gtφC1C2, C0 = utut + uφuφ,
N2 =√
gθθ (1+ uθuθ), C1 = urut,
N3 =
√
gttℓ2 − 2gtφℓ − gφφ, C2 = uruφ. (10)
Hatted indices refer to fluid frame quantities and unhatted indicesrefer to Boyer-Lindquist frame quantities. In the orthonormal fluidframe the metric is the Minkowski metric,ηab = diag(−1,1, 1,1).So hatted indices are raised and lowered with the Minkowski metricand unhatted indices are raised and lowered with the Kerr metric.
The fluid frame basis (6)-(9) was constructed using a Gram-Schmidt process. There is some arbitrariness in the orientation ofthe frame, but we followed standard conventions. Equation (6) forωt is necessary because the Lorentz factor in the fluid frame shouldsatisfyγ = −ut = −ωµt uµ = 1. The next step in the Gram-Schmidtprocess is to defineωφ such that it is orthogonal toωt and hasno component alongdr or dθ. Finally,ωr andωθ are constructed.Notice thatωr has a nonzero component alongdφ, andωθ hascomponents along all four Boyer-Lindquist directions. This is un-avoidable. However, the most important directions for the physics,ωr andωφ, are aligned as closely as possible with their Boyer-Lindquist analogues.
The arbitrariness in the construction of the fluid frame leads toan ambiguity in the definition ofα. One usually avoids quantitieswith these sorts of ambiguities. But, as discussed in§1, α is toouseful for accretion disk modeling and turbulence theory toaban-don. So our strategy is to defineα in the most natural way possibleand see where this leads.
If the poloidal velocity is much smaller than the az-imuthal velocity, as usually happens everywhere except in theinnermost regions of the disk, the fluid frame basis simplifies(Novikov & Thorne 1973):
ωt= utdt + uφdφ, (11)
ωr= D−1/2dr, (12)
ωθ = r dθ, (13)
ωφ = γrA1/2 (dφ − Ωdt) . (14)
The Lorentz factor isγ =√−gttut and
A = 1+ a2r−2+ 2Ma2r−3, D = 1− 2Mr−1
+ a2r−2. (15)
The relativistic factorsA,D, andγ are unity at large radii. In fact,in this limit, the fluid frame basis is exactly aligned with the Boyer-Lindquist frame. So the ambiguities in the general relativistic defi-nition of α discussed earlier are not important in the outer regionsof the disk. There remains a potential ambiguity in the constructionof the Boyer-Lindquistr andθ coordinates, even when the gas isnonrelativistic, because the black hole’s spin axis breaksthe spher-ical symmetry of spacetime. But this is also negligible far from theblack hole where frame dragging is weak.
2.2 Electric and Magnetic Fields
All observers interact with the same electromagnetic field.Theymight measure its components,Fµν, differently, depending on theirreference frames, but the underlying object is the same multilinearmap,F.
The electric and magnetic fields are not so universal: each
c© 0000 RAS, MNRAS000, 000–000

4 R. F. Penna, A. S. Sadowski, A. K. Kulkarni, & R. Narayan
observer splits the electromagnetic field into different electric andmagnetic components. An observer with four-velocityuµ measureselectric and magnetic fields
eµ = uνFνµ, bµ = uν∗Fµν, (16)
where the dual Faraday tensor is∗Fµν = ǫµνκλFκλ/2, the Levi-Civitasymbol isǫµνκλ = − [µνκλ] /√−g, and
[
µνκλ]
is the completelyantisymmetric symbol, equal to either 0,−1, or+1.
The electric and magnetic fieldseµ andbµ transform as ten-sors, so they can be evaluated in any frame. In general, all fourcomponents are nonzero. The four-velocity of the observer,uµ,appears in (16), so each observer interacts with different electricand magnetic fields. Following standard convention, we denote theBoyer-Lindquist observer’s splittingEµ andBµ, and we denote thefluid frame’s splittingeµ and bµ. In Boyer-Lindquist coordinatesBt= Et
= 0, and in the fluid frameet= bt= 0, by the antisymme-
try of Fµν. The remaining nonzero components in these frames arethe usual three-vectors of special relativity.
In ideal MHD,eµ = 0, so the fluid frame splitting ofFµν is usu-ally the simplest. For calculations, Boyer-Lindquist coordinates aresometimes more convenient than the fluid frame. So it is commonto work withbµ, the fluid frame observer’s magnetic field expressedin Boyer-Lindquist coordinates. This is legitimate, becausebµ is a4-vector, but no observer would measurebt, br , bθ, or bφ. Physicallymeaningful quantities arebr , bθ, andbφ.
It is possible to convert betweenBµ andbµ directly, withoutreference toFµν. In Boyer-Lindquist coordinates, the formulae are:
bt= Bµuνgµν, bi
=Bi+ btui
ut, (17)
Bµ = bµut − btuµ. (18)
In these equations,i runs overr, θ, φ, andµ, ν run overt, r, θ, φ.
2.3 Shear Rate
The shear rate is a measure of how rapidly the angular velocityof an accretion disk varies with radius. It isrΩ,r/2 in Newtoniangravity. More generally, one can define the special relativistic sheartensor
σαβ ≡12
(
uα,µhµ
β+ uβ,µh
µα
)
− 13Θhαβ, (19)
wherehαβ = gαβ + uαuβ is the projection tensor andΘ = uα ;α isthe expansion scalar (Novikov & Thorne 1973). Then the shearrateis the rφ component of this tensor measured in the fluid frame:σrφ. The shear tensor so defined is trace-free and symmetric. Toobtain the general relativistic version, one should replace partialderivatives in equation (19) with covariant derivatives. We do notrequire this generality because in the inertial fluid frame the lawsof physics take on their special relativistic form without gravity, bythe equivalence principle.
To obtain a simple formula for the shear rate, let us assumethe poloidal velocity is small and the flow is axisymmetric. Thenwe can ignore the expansion scalar,Θ, use equations (11)-(14) forthe fluid frame transformation, and ignore derivatives withrespectto φ. The fluid frame projection tensor ishαβ = diag(0,1, 1,1), sothe shear rate is
σrφ =12
uφ ,r , (20)
which resembles the Newtonian shear rate,rΩ,r/2. In the fluid
frame,uφ(r) = 0, so the derivative is2:
σrφ =12
limdr→0
uφ(r + dr)dr
. (21)
We use equations (11)-(14) to rewrite fluid frame measurements interms of Boyer-Lindquist measurements, obtaining:
σrφ =12γ2ArΩ,r . (22)
This is the product of the Newtonian shear raterΩ,r/2 with a rel-ativistic correction,γ2A. Novikov & Thorne (1973) state this for-mula without proof. It describes the rate of change of a disk’s angu-lar velocity with radius, assuming the azimuthal velocity dominatesthe poloidal velocity.
A dimensionless measure of the shear rate is
q = −2σrφ/Ω = −γ2Ad logΩd logr
. (23)
Positiveq corresponds to angular velocity decreasing with radius.Solid body rotation isq = 0. Accretion disks generally have posi-tive q, althoughq changes sign near the photon orbit in black holedisks. Flows with positiveq are unstable to the MRI (Velikhov1959; Chandrasekhar 1960; Balbus & Hawley 1991), and the valueof α is a function ofq (Pessah et al. 2008). Flows withq > 2are Rayleigh (hydrodynamically) unstable. The MRI has beenana-lyzed in theq > 2 regime by Balbus (2012)3. Circular geodesics inNewtonian gravity haveq = 3/2. Circular, equatorial geodesics inthe Kerr metric have (Gammie 2004)
q =32
1− 2Mr−1+ a2r−2
1− 3Mr−1 + 2aM1/2r−3/2. (24)
which becomes 3/2 at large radii. The fact thatα is a function ofq,and in the Kerr metricq is a function of radius, is the basis for theturbulent component of the one-dimensionalα model in§3.
2.4 Radial Epicyclic Frequency
The radial epicyclic frequency is the frequency at which a radi-ally displaced fluid parcel will oscillate. As a function ofq, it is(Pringle & King 2007)
κ =√
2(2− q)Ω. (25)
This expression is valid in the inertial fluid frame providedwe usethe relativistic expressions forΩ andq, equations (5) and (23).
Circular geodesics at the ISCO haveκ = 0 by definition, whichmakes it easy to see that they haveq = 2. A thin accretion disk startswith q = 3/2 at large radii and thenq increases until it reaches 2 atthe inner edge. The radial dependence ofκ2 for circular, equatorialKerr geodesics is (Gammie 2004)
κ2 =1r3
1− 6M/r + 8aM1/2r−3/2 − 3a2/r2
1− 3Mr−1 + 2aM1/2r−3/2. (26)
The epicyclic frequency is zero at the ISCO, and imaginary insidethe ISCO, signaling the instability of circular geodesics.In §5 and§6, we compute the epicyclic frequency of simulated GRMHD ac-cretion disks as a function of radius. The inner edge of the disk
2 We abuse notation for clarity. The commutators of fluid framebasis ele-ments do not vanish in general, so they are not coordinate induced: there isno “r” coordinate satisfyingdr = er .3 Note that our simulated disks haveq < 2 at all radii. The scaled epicyclicfrequency reaches a minimum near the ISCO and increases in the plungingregion.
c© 0000 RAS, MNRAS000, 000–000

Shakura-Sunyaev viscosity prescription 5
can be identified with the minimumκ. Only for thin disks doesκhave a sharp minimum at the ISCO. In general, pressure gradientforces and magnetic stresses smear out the inner edge of the diskand displace it from the ISCO.
3 ONE-DIMENSIONAL MODEL FOR α(r)
In this section we define a one-dimensional prescription forthe de-pendence ofα on radius. Our model is the sum of two components:a turbulent component that dominates in the outer regions ofthedisk and a large scale magnetic field component that dominates inthe inner regions of the disk. We discuss each component separatelybefore combining them into a single prescription forα(r). We willfit this α(r) prescription to data from GRMHD simulations in§§4-6.
The standardα viscosity prescription is
T rφ = αp, (27)
whereT rφ is the fluid frame stress,p is pressure, andα is a con-stant (Shakura & Sunyaev 1973). There are two equivalent waysto modify this prescription. One can add extra factors multiply-ing the RHS of equation (27) and keepα a constant, or one cankeep equation (27) unchanged but defineα to be a function of ra-dius,α = α(r). We chose the later convention because it makes iteasy to adapt oldα-disk solutions to the new prescription: just in-sertα(r) whereverα appears. Both approaches have been used inthe past so it requires a bit of care to compare results. For exam-ple, Abramowicz et al. (1996) discussed the dependence ofα on q,while Pessah et al. (2008) modified (27) and keptα a constant.
3.1 Turbulent α
We have seen in§2.3 thatq can be a function of radius, eitherthrough relativistic corrections to the Newtonian shear rate, orthrough the dependence ofΩ on radius. It turns outα is a func-tion of q, and so it too can depend on radius. Thatα depends onqis perhaps not surprising. MHD flows are unstable to the MRI andhave finiteα whenq > 0, but they are stable against the MRI andhave vanishingα whenq < 0. Some dependence ofα on q mustconnect these two regimes.
Pessah et al. (2008) examined the dependence ofα on q nu-merically. They used nonrelativistic shearing box simulations withresolution 32× 192× 32 in r × φ × z, zero net magnetic flux, andinitial gas-to-magnetic pressure ratioβ = 200. They ran a series ofsimulations in which they variedq from q = −1.9 up toq = 1.9 insteps of∆q = 0.1. Each simulation ran 150 orbits and they mea-suredα by averaging the data from the last 100 orbits. Forq > 0,they found the power-law scaling
α ∝ qn, (28)
where n is between 2 and 8. Higher resolution simulations areneeded to determinen more precisely. Forq < 0, they foundα = 0,as expected from the MRI stability criterion.
Between the inner edge of a thin accretion disk and the outer,non-relativistic regions,q only varies by 50% (c.f.§2.3), butα canvary by much more if the exponent in equation (28) is large. Forn = 8, the change inα is a factor of 10.
To get a quantitative prescription forα(r), we needq(r). Sofirst we solve standardα-disk equations with constantα = α0. Thisgivesq(r). Then we defineα(r) = α0
[
q(r)/1.5]n. The exponent is
a free parameter to be determined from MHD simulations. Now
one could iterate: feedα(r) back into theα-disk equations, and re-evaluateq(r). For simplicity, we do not iterate. We check our modelfor α(r) against GRMHD simulation data in§§4-6, but the simula-tion data are too noisy to justify computingα(r) more precisely fornow.
Theα-disk solutions we use are the relativistic slim disk so-lutions of Abramowicz et al. (1988); Sadowski (2011). This is afamily of one-dimensional solutions for black hole accretion withfour free parameters: black hole mass and spin, accretion rate, andα. At low accretion rates they reduce to the standard thin disks ofShakura & Sunyaev (1973) and Novikov & Thorne (1973), and athigh accretion rates they become advection dominated and are sim-ilar to slim disks (Abramowicz et al. 1988; Sadowski 2011)
This prescription forα(r) neglects the contribution of largescale, mean magnetic fields, which can exist even in laminar flow.These are important near and inside the inner edge of the disk,where the flow acquires a large radial velocity and stretchesthefrozen-in magnetic field. We discuss this contribution toα(r) in thenext section.
3.2 Mean Magnetic Field Stresses
Penna et al. (2010) observed large scale, mean field stressesinGRMHD simulations of black hole accretion disks, and theyshowed that a one dimensional model developed by Gammie(1999) could fit the data.
Gammie (1999) solved for the motion of a fluid with a frozen-in magnetic field as it plunges into a Kerr black hole along theequa-torial plane. The inner boundary of the flow is at the event horizonand the outer boundary of the flow is atrB, where the flow is as-sumed to have zero radial velocity and Keplerian angular velocity.The governing equations are mass, angular momentum, and energyconservation, and Maxwell’s equations. There is no dissipation andthe pressure and internal energy of the gas are neglected. The solu-tions are time-independent, axisymmetric, and verticallyaveraged.They provide the rest mass density, velocities, and magnetic fieldof the flow as a function of radius. The free parameters area/M, rB,and the amount of magnetic flux threading the horizon. FollowingPenna et al. (2010), we parametrize the flux threading the horizonby
Υ =
∫
|Br|dA√
MM, (29)
which is dimensionless. A “magnetically arrested disk” cor-responds to φBH ≡
√πΥ & 50 (Narayan et al. 2003;
Tchekhovskoy et al. 2011; Narayan et al. 2012).Gammie’s code for generating solutions numerically using the
shooting method is available on the web.4 The solutions are ex-pressed in terms ofBi, butbµ follows from equations (17)-(18), andthe stress,−brbφ, follows from equations (6)-(9).
3.3 Combined Model
Combining the turbulent and mean field contributions toα(r) givesthe one-dimensional prescription
α(r) = α0
[
q(r)3/2
]n
− α1
br(r)bφ(r)
ρ(r)Γ, (q > 0). (30)
4 http://rainman.astro.illinois.edu/codelib/codes/inflow/src/
c© 0000 RAS, MNRAS000, 000–000

6 R. F. Penna, A. S. Sadowski, A. K. Kulkarni, & R. Narayan
If there are no large scale fields andq = 3/2, thenα(r) = α0, aconstant. Ifq < 0, then one should only include the second termon the RHS. The Gammie (1999) solutions do not include gas pres-sure so we have divided the mean field stress byρ(r)Γ, which isproportional to pressure for a polytropic gas. This is a crude substi-tute for the pressure but it gives an acceptable fit to the simulationsdiscussed below.
Given M, a/M, M, α0, Γ, Υ, andrB, the slim disk equationsprovideq(r), and the Gammie (1999) equations providebr(r), bφ(r),andρ(r).
The remaining free parameters areα1 andn. These parameterscan be inferred from MHD simulations. Note thatα0 andn controlthe size and shape of the turbulent contribution toα(r), andα1 andrB control the size and shape of the mean field contribution toα(r).
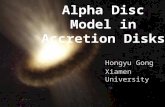
In §§4-6, we estimate values for these four parameters byfitting the α(r) prescription to data from six GRMHD simula-tions. As an example, Figure 1 showsα(r), as prescribed by equa-tion (30), for the parameters of Model A in Table 4 (solid redcurve). The mean magnetic field contribution toα(r) (long-dashedgreen curve) dominates inside the ISCO, where the plunging fluidstretches and amplifies the magnetic field. The turbulent contribu-tion toα(r) (dashed blue curve) dominates outside the ISCO, wheremean magnetic fields are weak. At large radii, the shear parame-ter becomes 3/2 andα becomes constant. Data from a GRMHDsimulation (gray points; c.f.§5.5) are in good agreement with theone-dimensional prescription forα(r).
In the next three sections, we detail our GRMHD simulationsand their connection to theα(r) prescription.
4 DETAILS OF THE SIMULATIONS
4.1 Computational Method
The simulations were carried out with the 3D GRMHDcode HARM (Gammie et al. 2003; McKinney 2006;McKinney & Blandford 2009), which solves the ideal MHDequations for the motion of a magnetized gas in the Kerr metric,the spacetime of a rotating black hole. The equation of motionof the gas is taken to beu = p/(Γ − 1), whereu and p are theinternal energy and pressure andΓ is the adiabatic index. The codeconserves energy to machine precision, so any energy lost atthegrid scale by, e.g., turbulent dissipation or numerical reconnection,is returned to the gas, increasing its entropy.
Table 1 gives a summary of the six simulations, which we havelabeled A–F. Simulations A, B, and C are thin, radiatively efficientdisks, and simulations D, E, and F are thick, radiatively inefficientdisks. The spin parameter isa/M = 0.7 for simulations B and E,anda/M = 0 for the others.
Most of the simulations have been described in previous pa-pers, so our overview of the simulations in this section can bebrief. Simulations B and C are two of the models discussed byKulkarni et al. (2011). Simulations A, B, and C were analyzedbyZhu et al. (2012) (where they are labeled E, B, and C, respectively).Finally, simulations D and F were studied by Narayan et al. (2012)(where they are called SANE and MAD). The only simulation thathas not appeared before is E, but it only differs from D in that it hasa/M = 0.7 and a duration of 100, 000M.
The resolution of simulations B and C inr×θ×φ is 256×64×32, and the resolution of the other simulations is 256× 128× 64.The radial grid is logarithmically spaced to concentrate attentionon the inner regions of the flow. The inner boundary of the gridis
Figure 1. The α(r) prescription defined by equation (30), for parametersα0 = 0.025,α1 = 100, n = 6, andrB = 6M (solid red curve). This pre-scription is the sum of two terms, a mean magnetic field component (long-dashed green), which dominates inside the ISCO, and a turbulent compo-nent (dashed blue), which dominates outside the ISCO. Thesetwo com-ponents are based on the one-dimensional models of Gammie (1999) andSadowski (2011), respectively. At large radii,α(r) converges toα0 = 0.025,a constant. This model is a good description of the data from simulationA (gray points; c.f.§5). Data from insiderstrict are marked with filled cir-cles, data from betweenrstrict andrloose are marked with open circles, anddata from outsiderlooseare marked with crosses (c.f.§5.5).
between the Cauchy horizon and event horizon, and outflow bound-ary conditions are used there, so the event horizon behaves as a truehorizon. The polar grid is squeezed towards the equatorial plane toconcentrate resolution on the turbulent, high density regions of theflow, at the expense of the laminar, coronal regions. Simulations D,E, and F use a version of the grid developed by Tchekhovskoy etal.(2011), in which theθ resolution near the pole increases with in-creasing radius so as to follow the formation of jets, which colli-mate at large distances. The azimuthal grid is uniform and extendsfrom 0 toφmax, whereφmax is eitherπ/2 (simulations A, B, and C)or 2π (simulations D, E, and F).
The properties of the six simulations are summarized in Table1.
4.2 Initial Conditions
Initially, the gas orbits the black hole in a torus in hydrostaticequilibrium (De Villiers et al. 2003; Penna et al. 2010, 2012a). Thethickness of the torus can be adjusted to give either thin or thick ac-cretion disks. A weak poloidal magnetic field threads the torus. Allof the simulations start with a sequence of poloidal loops, except F,which starts from a single magnetic loop. When there are multipleloops, the black hole accretes flux of alternating polarity over timeand little net flux builds up on the hole. In simulation F, the centerof the loop atr = 300M does not reach the black hole over the du-ration of the simulation, so the black hole acquires a large net flux.
c© 0000 RAS, MNRAS000, 000–000

Shakura-Sunyaev viscosity prescription 7
Table 1. GRMHD simulation parameters
Simulation a/M h/r Initial loops nr × nθ × nφ φmax Duration
A 0 0.1 Multiple 256× 128× 64 π 20, 000MB 0.7 0.05 Multiple 256× 64× 32 π/2 27, 000MC 0 0.05 Multiple 256× 64× 32 π/2 27, 000MD 0 0.3 Multiple 256× 128× 64 2π 200, 000ME 0.7 0.3 Multiple 256× 128× 64 2π 100, 000MF 0 0.3 Single 264× 126× 60 2π 100, 000M
In all of the simulations, the magnetic field is normalized sothatthe initial gas-to-magnetic pressure ratio has minimumβ = 100.
4.3 Quasi-Steady State
The initial condition is unstable to the MRI. Differential rotation ofthe torus triggers the MRI and the gas becomes turbulent after ∼ 10orbits. Turbulence transports angular momentum and energyout-wards and the gas accretes inwards. At late times in the simulation,gas in the disk near the midplane is turbulent. Magnetic buoyancylifts fields above and below the disk, forming a highly magnetizedcorona. The corona is mostly laminar because the MRI requiresβ > 1.
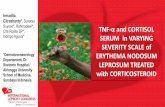
Figure 2 shows the fluid frame magnetic field at the end ofsimulations A and D. The field has been azimuthally averaged butnot time averaged. The coordinates arex/M = r sin(θ) andz/M =r cos(θ). The turbulent region of simulation A is thinner than theturbulent region of simulation D. The turbulent region of simulationD extends nearly to the polar axes.
5 ANALYSIS OF SIMULATIONS A AND D
In this section we discuss our analysis of simulations A and D.These describe a prototypical thin disk and a prototypical thick diskaround non-spinning black holes. We discuss the remaining foursimulations in§6
Our goal for this section, achieved in§5.6, is to extractα(r)profiles from the simulation data and compare them with the one-dimensional prescription defined by equation (30). As a firststep,we discuss the distinction between disk and coronal fluid. Weonlyinclude disk fluid in our calculations. Then we discuss the radialrange of fluid that can be considered to have reached a quasi-steadystate. We only include quasi-steady data in our calculations. Weexamine the shear rate and epicyclic frequency of the simulations,because these play an important role in determiningα. Finally, wecomputeα(r) and compare it with our prescription from§3
5.1 The Distinction Between Disk and Corona
We would like to separate the disk component of the flow fromthe coronal component so that we can focus our analysis on thedisk. There are several reasons to do this. For one, the stress hasa different character in the corona and disk regions of the flow. Inthe corona, the stress is mostly generated by mean magnetic fields,while in the disk, the stress is generated largely by turbulence. Soincluding coronal stresses in the model would add new difficulties.For this reason, and also for simplicity, we focus on the diskregionof the flow.
There are other reasons to isolate the disk from the corona. Atleast in thin accretion disks, the emission from the corona and diskare different. The disk has a thermal spectrum and the corona has apower law spectrum. So the distinction is sensible for observations.Accretion disk models which use theα-viscosity prescription tendto focus on the disk region of the flow and ignore the corona. An-other reason to separate out the disk region is that our numericalgrid concentratesθ resolution at the midplane and leaves the polarregions poorly resolved. So the simulation data are unreliable in thecorona.
We therefore only include fluid within one density scale heightof the midplane in our analysis. The density scale height is definedas,
hr=
∫ 2π
0
∫ φmax
0
∫ t2t1|θ − π/2| ρut √−gdtdθdφ
∫ 2π
0
∫ φmax
0
∫ t2t1ρut√−gdtdθdφ
. (31)
whereρ is rest mass density in the fluid frame, andρut is restmass density in Boyer-Lindquist coordinates. The time integralis over the steady state period of the flow, as explained below.Another popular definition for the scale height is(h/r)rms =(∫
(θ − π/2)2 ρ√−gdtdθdφ/
∫
ρ√−gdtdθdφ
)1/2. We have no rea-
son to favor one definition over another, though it should be notedthat (h/r)rms can be a factor of∼ 2 bigger thanh/r (Penna et al.2010).
We also add a density-weighting to vertical averages, to fur-ther emphasize midplane fluid. That is, the density weightedverti-cal average ofO is
∫
Oρut √gθθdθ/∫
ρut √gθθdθ.The top panel of Figure 3 shows log(α) as a function ofx and
z for simulation A. We explain howα is obtained from the simula-tion in §5.5, but we show this plot here to illustrate the distinctionbetween the disk and the corona. Black dashed curves mark onescale height above the midplane. Note thatα has a very differentcharacter above and below the disk region. In the coronal regionsα is much larger than in the disk. The bottom panel of Figure 3shows the ratio of Maxwell stress to Reynolds stress on a loga-rithmic scale. Maxwell stresses are much more significant inthecorona. The different character of the flow in these two regions isone of the reasons we only include disk fluid within oneh/r of themidplane in our calculations.
Figure 4 shows the same quantities for simulation D. Again,α
and the Maxwell stress are much larger outside the disk. However,the shape of this region does not trackh/r as it did in simulationA. In fact, the highα, high Maxwell stress region has a parabolicshape, bounded by roughlyz/M = (r/6M)2. This looks like a jet.For simplicity and consistency, we will restrict our calculations tothe fluid within oneh/r of the midplane for all of the simulations.We have checked that our results do not depend on the details ofthis cutoff, as long as we do not include the “jet” region.
c© 0000 RAS, MNRAS000, 000–000

8 R. F. Penna, A. S. Sadowski, A. K. Kulkarni, & R. Narayan
0 5 10 15 20-10
-5
0
5
10
xM
zM
0 20 40 60 80 100
-40
-20
0
20
40
xMz
MFigure 2. Left panel: Black, white, and red streamlines show the poloidal, fluid frame magnetic field (br , bθ) for simulation A. The field has been azimuthallyaveraged to make the streamlines appear continuous in this two-dimensional projection (this makes the flow appear slightly less turbulent). Turbulent twistingof the magnetic field can be seen on different scales. When the field is twisted on the smallest scale,the grid scale, there is reconnection and dissipation. Thedensity scale height of the disk ish/r ∼ 0.1 (c.f.§5.1). Fluid in the disk region of the flow is turbulent. Magnetic buoyancy lifts magnetic fields out of the diskwhere they settle in a highly magnetized coronal region. Thecoronal region is mostly laminar, because magnetic tensionis quenching the MRI. On very largescales, the magnetic field has an approximately dipolar structure.Right panel: Same as left panel, but for simulation D. This accretion flow is much thickerand the flow only becomes laminar near the polar axes.
5.2 Radial and Azimuthal Velocities
To extract smooth results from turbulent data, it is necessary to av-erage the data over at least a viscous time, which smooths outtur-bulent fluctuations (Narayan et al. 2012). As a first step, we needthe radial velocity of the simulations. To compute the shearrateand epicyclic frequency of the gas (and thusα), we need the az-imuthal velocity of the gas. We compute these two componentsofthe velocity in this section. We will not need theθ component ofthe velocity. It is much smaller than the radial and azimuthal com-ponents in the disk region of the flows.
In a thin accretion disk, the gas closely follows circulargeodesics as it spirals toward the ISCO. The radial velocityofthe gas is significantly smaller than the azimuthal velocity. In astandard thin disk, the radial velocity is suppressed by a factor ofα(h/r)2. In the ADAF solution, which describes a very thick accre-tion flow, the radial velocity is suppressed by a factor ofα relativeto the azimuthal velocity. These relations hold approximately forthe GRMHD simulations as well.
The radial velocity most relevant for turbulence is the onemeasured by the zero angular momentum observer (ZAMO) ofBardeen et al. (1972). This is a local, inertial frame attached to ob-servers with zero angular momentum. As a result of frame drag-ging, ZAMO observers appear to rotate with respect to observers atinfinity. The ZAMO frame is at rest with respect to the local space-time.
The radial velocity in the ZAMO frame is
vr =
√A∆
ur
ut, (32)
where∆ andA are defined by equations (2) and (4).The top left panel of Figure 5 shows the radial velocity as a
function of radius for simulation A. The data has been averagedover the disk region of the flow, with a density weighting, as dis-cussed in§5.1. It has been time-averaged over the quasi-steadystate period of the flow, which we explain below. The ISCO is atr = 6M. Inside the ISCO, the gas is approximately in free fall andthe radial velocity increases rapidly as the gas approachesthe blackhole. Outside the ISCO, the motion is more nearly circular. In thisregion, the radial velocity is suppressed relative to the azimuthalvelocity as predicted by standard disk theory. Because the radialvelocity is small, it takes a long time for the simulation to reach aquasi-steady state. Once steady state is reached, it requires a timeaverage extending over many orbital periods to smooth out turbu-lent fluctuations and obtain reliable results. We take up these issuesin the next section.
The top right panel of Figure 5 shows the radial velocity asa function of radius for simulation D. The radial velocity ismuchlarger than the radial velocity of A, because this accretionflow isgeometrically thick. For this reason, the data from this simulationis in quasi-steady state out to a larger radius. Also, the larger radialvelocity smears out the inner edge of the accretion disk. There isno longer a sudden transition between slow and fast radial velocity,at the ISCO or at any other radius.
The bottom left panel of Figure 5 shows the angular velocity
Ω =dφdt=
uφ
ut, (33)
of simulation A as a function of radius. Again, we have in-cluded only fluid within one scale height of the midplane, takenthe density-weighted vertical average, and time averaged over thesteady state portion of the flow. The dashed line shows the an-gular velocity of circular geodesics in the equatorial plane, Ω =M1/2/(r3/2
+ aM1/2). The flow follows circular geodesics except for
c© 0000 RAS, MNRAS000, 000–000

Shakura-Sunyaev viscosity prescription 9
Figure 3. Top panel: log(α) in ther−θ plane for simulation A. The data hasbeen time-averaged overt = 7, 000M − 20, 000M. Dashed black lines indi-cate one density scale height above and below the midplane (c.f. §5.1). Werefer to the lowα region within one scale height of the midplane as the disk,and the highα region outside one scale height as the corona. We restrict ourcalculations to the disk, for the reasons discussed in§5.1. We show thisplot here to illustrate the difference between the disk and the corona. Weexplain howα is obtained from the simulation in§5.5.Bottom panel: Time-averaged ratio of Maxwell stress to Reynolds stress on a log scale, in ther− θ plane, for simulation A. Coronal fluid is more magnetically dominatedthan disk fluid. This is expected, as magnetic buoyancy liftsmagnetic fieldsinto the corona.
r . 5M, where the radial velocity is increasing rapidly. The angu-lar velocity peaks around 3M. At this radius, the shear parameterqmust go to zero, so the turbulent contribution toα becomes negli-gible.
The bottom right panel of Figure 5 shows the angular veloc-ity of simulation D. It is also nearly Keplerian outside the ISCO.This is perhaps surprising, because the angular velocity ofthe self-similar ADAF solution is very sub-Keplerian. The initial torus ofthe GRMHD simulation persists at large radii over the durationof the simulation and continues to feed nearly Keplerian gasintothe inner regions of the flow. This acts as a very strong boundarycondition, which may limit the solution’s ability to converge to theADAF solution. The ADAF solution is self-similar and describes anaccretion flow with infinite extent but, as we will see, the simulationis only converged out tor = 100M. A longer duration simulation,which has reached quasi-steady state out to a larger radius,might be
Figure 4. Same as Figure 3, except for simulation D. Unlike simulationA,the highly magnetized region does not have the same shape as the disk scaleheight. In fact, the former has a paraboloidal, jet-like shape, approximatelyz/M = (r/6M)2.
expected to have a more ADAF-like angular velocity. Nonetheless,the radial velocity of simulation D does appear to be converging tothe ADAF prediction, as shown by Narayan et al. (2012).
5.3 Convergence and Steady State
Following Narayan et al. (2012), we divide the data from simula-tion D into six “time chunks” which are logarithmically spacedin time. Each time chunk is about twice as long as the previousone. They are summarized in Table 3. This logarithmic spacingis useful since most of the quantities we are interested in showpower-law behavior as a function of both time and radius. Notethat there is no overlap between chunks, and hence each chunkprovides independent information. Because the duration ofsimu-lation A is only 20,000M, we use a single time chunk, spanningt = 7,000M − 20, 000M.
For each time chunk, we compute the time-averaged ra-dial velocity profile vr(r) of the gas within one scale-heightof the mid-plane. We estimate the viscous time at radiusr by(Novikov & Thorne 1973; Penna et al. 2010):
tvisc(r) =r|vr(r)| . (34)
Following Narayan et al. (2012), we then define two criteria,one
c© 0000 RAS, MNRAS000, 000–000

10 R. F. Penna, A. S. Sadowski, A. K. Kulkarni, & R. Narayan
Figure 5. Top left: Radial velocity as a function of radius for simulation A. Thesolid line extends tor = rstrict and the dashed line extends tor = rloose
(estimated convergence radii of§5.3). The radial velocity increases suddenly around the ISCO at r = 6M, inside of which there are no stable circular orbitsfor the gas to follow.Top right: Radial velocity as a function of radius for simulation D. Colors correspond to time chunks 1 (blue), 2 (green), 3 (red), 4(cyan), 5 (magenta), and 6 (black) (see§5.3).Bottom left: Angular velocity as a function of radius for simulation A. The dashed black curve shows the angularvelocity of circular, equatorial geodesics. The simulatedflow is nearly geodesic outside the ISCO. The angular velocity has a maximum near the photon orbitat r = 3M, so the shear parameter (and hence the turbulent contribution toα) will be zero here.Bottom right: Angular velocity as a function of radius forsimulation D. This flow is slightly sub-Keplerian outside the ISCO.
“strict” and one “loose,” to estimate the radius range over whichthe flow has achieved inflow equilibrium:
tvisc(rstrict) = tchunk/2, (35)
tvisc(rloose) = tchunk, (36)
wheretchunk is the duration of the chunk. The values oftchunk, rstrict,andrloose for the various time chunks are summarized in Tables 2and 3. We only trust data from insiderloose. Data from insiderstrict
are considered particularly reliable.
5.4 Shear and Epicyclic Frequencies
Now we compute the dimensionless shear parameter,q, and theepicyclic frequency,κ, as a function of radius. The shear parameteris computed fromq = −2σrφ/Ω. The epicyclic frequency is com-puted from the shear parameter using equation (25). The dataarevertically averaged over the gas within one scale height of the mid-plane using the density weighting. The data are time averaged overthe time chunks listed in Tables 2 and 3.
The top left panel of Figure 6 shows the shear parameter as afunction of radius for simulation A out torstrict (solid curve) andrloose (dotted curve). The analytical shear parameter for circular,equatorial Kerr geodesics is shown for comparison (dashed curve).At large radii, the analyticalq converges to the shear parameterof non-relativistic Keplerian flow,q = 3/2. At the ISCO, generalrelativistic corrections increase the shear parameter toq = 2. TheGRMHD shear parameter is about 10% larger than the analyticalshear parameter outside the ISCO. Inside the ISCO, the analyticalq blows up as it approaches the photon orbit. The GRMHD shear
parameter goes to zero near the photon orbit and is negative veryclose to the black hole.
The top right panel of Figure 6 shows the shear parameter as afunction of radius for simulation D. Results are shown for each ofthe time chunks. All of the time chunks are consistent out torloosetowithin several percent. This gives us confidence that the simulationhas converged to a quasi-steady solution. The GRMHD shear pa-rameter is similar to the shear parameter of simulation A. Itis about10% larger than the analyticalq outside the ISCO, turns over insidethe ISCO, and drops to zero near the photon orbit. There is goodagreement between the GRMHD and analytical shear parametersout torloose∼ 100M.
The bottom left panel of Figure 6 shows the epicyclic fre-quency as a function of radius for simulation A. The bottom rightpanel shows the same quantity for simulation D. In both cases, out-side the ISCO, the epicyclic frequency of the simulation is about10% lower than the epicyclic frequency of Keplerian flow. In bothcases the epicyclic frequency has a minimum near the ISCO. Theminimum of the epicyclic frequency roughly marks the most unsta-ble radius in the flow, becauseκ = 0 corresponds to marginal stabil-ity. So it is consistent with standard disk theory that the minimumof κ is near the ISCO. Simulation D has a broader and shallowerminimum, indicating the inner edge of this disk has been “smearedout” by the larger radial velocity of the flow.
5.5 Shakura-Sunyaev Viscosity Parameter, α
Finally, we compute the dimensionless viscosity parameter, α. TheGRMHD stress-energy tensor is a combination of Reynolds and
c© 0000 RAS, MNRAS000, 000–000

Shakura-Sunyaev viscosity prescription 11
Table 2. Convergence radii for simulations A, B, and C
Simulation Time Range (M) tchunk/M rstrict/M rloose/M
A 7,000-20,000 13,000 9 10B 20,000-27,000 7,000 6.5 7C 20,000-27,000 7,000 6.5 7
Table 3. Time chunks for simulation D
Chunk Time Range (M) tchunk/M rstrict/M rloose/M
I 3,000-6,000 3,000 19 23II 6,000-12,000 6,000 25 43III 12,000-25,000 13,000 29 45IV 25,000-50,000 25,000 43 62V 50,000-100,000 50,000 66 92VI 100,000-200,000 100,000 86 113
Maxwell terms:
Tµν = T (rey)µν + T (mag)
µν , (37)
where,
T (rey)µν = (ρ + u)uµuν + phµν, (38)
T (mag)µν =
12
(
b2uµuν + b2hµν − 2bµbν)
, (39)
andhµν = gµν + uµuν is the projection tensor. To each term thereis an associated stress, which is therφ component of the tensormeasured in the fluid frame. So the Reynolds stress isT (rey)
rφand the
Maxwell stress isT (mag)rφ
. An important difference between the twois that the Reynolds stress requires turbulence whereas theMaxwellstress can be generated by turbulence or large scale magnetic fieldsand thus can be nonzero even in laminar flow.
We defineα as the ratio of total stress to total pressure:
α =T (rey)
rφ+ T (mag)
rφ
p + b2/2. (40)
We have chosen to includeb2/2 in the denominator because it keepsα < 1. As a result of this choice, part of the observed dependenceofα on q is inherited via the magnetic pressure because the magneticpressure is amplified by shear. This is significant inside theISCOwhere the magnetic pressure is comparable to or exceeds the gaspressure.
We compute the Maxwell and Reynolds stresses in the restframe of the mean flow,
uµ =1φmax
∫ φmax
0uµdφ, (41)
rather than in the rest frame of the instantaneous flow,uµ. The meanflow is theφ-averaged instantaneous flow. There are some subtletiesin the distinction between these two frames. The Reynolds stressvanishes in the rest frame of the instantaneous flow,uµ, by defini-tion of the fluid frame, but not in the rest frame of the mean flow,uµ. This is our primary reason for choosing ¯uµ to define the iner-tial fluid frame when computingα . The electric field vanishes inthe rest frame of the instantaneous flow, by the assumption ofidealMHD, and not in the rest frame of the mean flow, but for simplicitywe assume the electric field can be neglected in both frames.
One could include a time average in the definition of the meanflow, equation (41). Penna et al. (2010) included a 100M time aver-age. That is, they averaged the instantaneous flow over all ofφ andover 100M in time to obtain the mean flow. At large radii, 100Mis much smaller than the orbital timescale, so this extra averaginghas little effect. However, inside the ISCO, 100M is larger than theorbital timescale. In this case, the time-averaged mean flowtendsto give largerα. The reason is that time-averaging increases thediscrepancy between the mean and instantaneous flows by addingcontributions to the mean flow from earlier and later times. Thisdiscrepancy propagates intoα when the stress tensor is boosted tothe rest frame of the mean flow.
Figure 7 showsα(r) for simulation A with and without a 100Mtime averaging in the definition of ¯uµ. Including the time averagingincreasesα and the effect is greatest inside the ISCO. In fact, thepeakα exceeds unity when the mean flow is defined with a timeaverage. This would imply the stresses carry more energy than thetotal energy of the gas and magnetic fields, which is unphysical.To avoid these sorts of contradictions, we do not include anytimeaveraging in equation (41).
The middle panel of Figure 8 shows the ratio of Maxwellstress to Reynolds stress in simulation A. Outside the ISCO,the ratio tracks the prediction of the linearized MRI, (4− q)/q(Pessah et al. 2006b). In fact, it is slightly larger, as is consistentwith shearing box simulations of MRI turbulence (Pessah et al.2006b). Inside the ISCO, the Maxwell stress is an order of mag-nitude larger than the Reynolds stress. The flow is mostly lami-nar inside the ISCO, so Reynolds stress is weak, and the plungingfluid stretches the magnetic field, so the Maxwell stress is strong.The bottom panel of Figure 8 shows the productαβ. It approachesthe expected value of≈ 0.5 in the disk (Blackman et al. 2008;Guan et al. 2009; Sorathia et al. 2012).
The top panel of Figure 9 showsα(r) for the six time chunksof simulation D. Outside the ISCO, the various time chunks agreeto within 30%, which provides an estimate for the contribution ofturbulent noise to the error in ourαmeasurements. Inside the ISCO,where the flow is more nearly laminar, the agreement between thetime chunks is better.
The bottom panel of Figure 9 shows the ratio of Maxwell toReynolds stress as a function of radius for simulation D. Inside
c© 0000 RAS, MNRAS000, 000–000

12 R. F. Penna, A. S. Sadowski, A. K. Kulkarni, & R. Narayan
Figure 6. Top left: Dimensionless shear parameter,q, as a function of radius for simulation A (solid and dotted curves) and for Keplerian flow (dashed). Thesimulation data are plotted out torloose (dotted curves) and out torstrict (solid curves). The simulated shear parameter turns over near the ISCO.Top right:Dimensionless shear parameter as a function of radius for simulation D. Colors are as in Figure 5.Bottom left: Epicyclic frequency as a function of radius forsimulation A. The epicyclic frequency has its minimum near the ISCO, as expected.Bottom right: Epicyclic frequency as a function of radius for simulationD. The minimum is still near the ISCO, but it is broader and shallower than the minimum in the epicyclic frequency of simulation A. The larger radial velocityof simulation D has “smeared out” the inner edge of the disk.
aboutr = 22M, the ratio is consistent with the ratio of simulationA. Outsider = 22M, the ratio begins to grow with radius. It is notclear what causes this. It may indicate that simulation D hasnotreached quasi-steady state at these radii yet. Figure 4 shows highlymagnetized, irregular clumps of fluid in the disk region, even aftertime-averaging the data over the last time chunk. In a true quasi-steady state, one would expect time averaging to eliminate theseclumps.
5.6 Comparison With the One-Dimensional α(r) Prescription
Finally, we compareα(r) of the simulations with the one-dimensional prescription forα(r) of §3, as defined by equation (30)and the parameters listed in Table 4.
Figure 1 shows the agreement between the GRMHDα(r) fromsimulation A and theα(r) prescription. Figure 10 shows the agree-ment between simulation D and theα(r) prescription. The inter-pretation of the GRMHDα(r) in terms of a mean magnetic fieldcomponent in the inner regions, and a turbulent component intheouter regions, appears to match the data. It is more difficult to fitsimulation D because theα(r) prescription relies on a sharp distinc-tion between the laminar, magnetically dominated inner regions ofthe flow, and the turbulent, weakly magnetized outer regions. Thisdistinction is cleanest in thin disks, like simulation A, which havea clear inner edge at the ISCO. In thick disks, like simulation D,the inner edge of the disk is smeared out by the radial velocity ofthe flow, so the separation ofα into two independent componentsis less sound.
The shape ofα(r) does not depend strongly on all of the pa-rameters in Table 4. The mass of the black hole in the GRMHDsimulations is dimensionless. It is listed in Table 4 because it goes
into the slim disk solutions that underlie the one-dimensional α(r)prescription. We setM/M⊙ = 10 arbitrarily and this choice has anegligible effect onα(r).
The accretion rate also enters through the slim disk part ofα(r). Our estimates ofM/Medd for the GRMHD simulations arebased on the analysis of Zhu et al. (2012), who usedh/r as a proxyfor the accretion rate. This gives rough estimates, which isall weneed because the dependence ofα(r) on the accretion rate is alsovery weak.
The magnetic flux threading the horizon,Υ, is measured di-rectly from the GRMHD simulations. It slightly affects the shapeof α(r) inside the ISCO.
The four parameters that strongly control the shape ofα(r) areα0, α1, n andrB. It is encouraging thatα0 = 0.025, andn = 6 givegood fits to both simulations. In other words, both simulations haveα(r) ∼ 0.025 at large radii, andα ∝ q6 (andq > 0) in the turbulentdisk.
Mean magnetic fields are only important inside the ISCO ofsimulation A, so we setrB = 6M in this case. The region wheremean magnetic fields are important in simulation D is broader, sowe setrB = 30M in this case.
6 ANALYSIS OF SIMULATIONS B, C, E, AND F
In this section we present data from four more GRMHD simula-tions. This gives information about the dependence of the viscosityparametersα0, α1, n, and rB, on black hole spin, resolution, andthe amount of magnetic flux threading the black hole. Of theseef-fects, the dependence on flux threading the black hole is the mostdramatic.
c© 0000 RAS, MNRAS000, 000–000

Shakura-Sunyaev viscosity prescription 13
Table 4. Parameters forα(r) fits to the GRMHD simulations
Simulation M/M⊙ a/M M/Medd Υ α0 α1 n rB
A 10 0 0.5 0.6 0.025 100 6 rISCO
B 10 0.7 0.2 3 0.025 10 6 rISCO
C 10 0 0.2 6 0.025 1 6 rISCO
D 10 0 1 5 0.025 0.5 6 30ME 10 0.7 1 10 0.025 0.5 6 30MF 10 0 1 30 0.025 0.1 6 30M
Figure 7. Dimensionless viscosity parameter,α, as a function of radius forsimulation A, with (magenta) and without (black) a 100M time-averagein the definition of the mean fluid frame, ¯uµ. Outside the ISCO, 100M islonger than an orbital period, so the effect is small. Inside the ISCO, 100Mis several orbital periods, so the effect is large.
6.1 Simulation E
Simulation E is identical to simulation D except the black hole hasspin parametera/M = 0.7 and the duration is 100, 000M. We havedivided the simulation data into time chunks as we did for simu-lation D, but there is one less time chunk because the duration ishalf as long. The time chunks and radii of convergence estimatesare listed in Table 5.
Figure 11 shows the radial and angular velocities as a functionof radius for the five time chunks. After the first three time chunks,aroundt = 25,000, the radial velocity drops by about a factor of2. Then it holds steady (to within a few percent) for the final twotime chunks. So even att = 25,000M, the simulation is still settlingdown. The radial velocity at the end of simulation E is about 30%lower than the radial velocity at the end of simulation D. As aresult,simulation E has converged over a smaller range of radii; we findrloose= 60M for the last time chunk (simulation D hadrloose= 90Mover the same time interval.)
Figure 12 shows the dimensionless shear parameter andepicyclic frequency as a function of radius. Outside the ISCO, theshear parameter is about 20% larger than the shear parameterof cir-
Figure 8. Top panel: Dimensionless viscosity parameter,α, as a func-tion of radius for simulation A. The data has been time averaged fromt = 7, 000M to 20, 000M. Solid and dotted curves correspond tor 6 rstrict
andr 6 rloose, Middle panel: Time-averaged ratio of Maxwell to Reynoldsstress for simulation A (solid and dotted curves). The dashed curve is thethe prediction from a linearized MRI analysis, 4/q(r) − 1 (Pessah et al.2006b), for Keplerianq(r), equation (24).Bottom panel: Productαβ forsimulation A (solid and dotted curves). The dashed line atαβ = 0.5 isthe expected value for saturated MRI turbulence (Blackman et al. 2008;Guan et al. 2009; Sorathia et al. 2012). The simulated product falls belowthis value inside the ISCO where the flow is mostly laminar.
cular geodesics and the epicyclic frequency is about 20% smaller,similar to the results from simulation D. The minimum epicyclicfrequencies of the two simulations are also comparable. SimulationD hadκ/Ω ∼ 0.6 and simulation E hasκ/Ω ∼ 0.5.
Figure 13 comparesα(r) as computed from the last time chunkof the simulation againstα(r) computed from the one-dimensionalviscosity prescription withα0 = 0.025,α1 = 0.5, n = 6, andrB =
30M. This is the same choice of parameters that gave a good fitto simulation D. It is interesting that they fit simulation E as well.This suggests the parameters of the modified viscosity prescriptiondo not depend strongly on black hole spin.
c© 0000 RAS, MNRAS000, 000–000

14 R. F. Penna, A. S. Sadowski, A. K. Kulkarni, & R. Narayan
Table 5. Time chunks for simulation E
Chunk Time Range (M) tchunk/M rstrict/M rloose/M
I 3,000-6,000 3,000 9.5 15II 6,000-12,000 6,000 15 20III 12,000-25,000 13,000 22 31IV 25,000-50,000 25,000 31 44V 50,000-100,000 50,000 44 60
Figure 9. Same as Figure 8 but for simulation D. Colors and line types areas in Figure 5.
Figure 10. Same as Figure 1 but for simulation D.
Figure 11. Same as Figure 5 but for simulation E.
Figure 12. Same as Figure 6 but for simulation E.
c© 0000 RAS, MNRAS000, 000–000

Shakura-Sunyaev viscosity prescription 15
Figure 13. Same as Figure 1 but for simulation E.
6.2 Simulation B
This simulation is identical to simulation A, except the black holeis spinning with spin parametera/M = 0.7 and the resolution is256× 64× 32 rather than 256× 128× 64.
The left panel of Figure 14 shows the GRMHDα(r). Theα(r)prescription is shown for the same parameters that gave a good fitto simulation A:α0 = 0.025,α1 = 1, n = 6, andrB = rISCO. Theparametersα0 = 0.025 andn = 6 governing the turbulent part ofα(r) are the same across all four simulations we have consideredso far, suggesting these parameters do not depend strongly on diskthickness.
6.3 Simulation C
Simulation C is the same as simulation A except the resolution islower: 256× 64× 32 versus 256× 128× 64 and the disk is thinner(h/r ∼ 0.05 instead ofh/r ∼ 0.1). The data from this simulationhas a lowerα than theα(r) prescription with our fiducial choiceof parametersα0 = 0.025 andn = 6. This suggests we are under-resolving the MRI at this resolution. To infer whether the valuesα0 = 0.025 andn = 6 are robust, higher resolution simulationswould be useful.
The results are shown in the right panel of Figure 14.
6.4 Simulation F
Simulation F differs from simulation D in one crucial respect. Theinitial torus of gas is threaded with a single poloidal magnetic fieldloop rather than multiple loops. The center of the initial loop iscentered atr = 300M and gas from this radius does not reach theblack hole over the duration of the simulation. So the polarity ofthe flux that reaches the black hole is approximately constant anda large net flux builds up on the hole. Narayan et al. (2012) give adetailed account of the convergence in time and radius, and the roleof outflows, in simulations D and F.
The large net flux carried by the gas in simulation D has a
0 20 40 60 80 100
-40
-20
0
20
40
xM
zM
Figure 15. Same as Figure 2 but for Simulation F. The magnetic field struc-ture does not show turbulent twisting on any scale; the flow ismostly lami-nar.
dramatic effect: the flow remains mostly laminar at all radii. Figure15 shows the fluid frame magnetic field in ther − θ plane att =100, 000M, the final snapshot of the simulation. The eddies andturbulent twisting of the field are all but gone on every scale, inmarked contrast to the other five simulations we considered (see,e.g., Figure 2).
Following Narayan et al. (2012), we divide the simulation datainto five time chunks. The time periods and estimated convergenceradii for each time chunk are summarized in Table 6. This simu-lation has the largest radial velocity of any of the simulations (seeFigure 16), so the estimated convergence radii are the largest. Thefinal time chunk hasrstrict = 170M andrloose= 207M.
Simulation F also has the most sub-Keplerian angular velocityof the six simulations (Figure 16). The angular velocity drops by afactor of a few between time chunks I and III, but it is consistentacross the final three time chunks to within a few percent.
The ratio of Maxwell stress to Reynolds stress has a muchclumpier distribution in ther − θ plane than any of the other simu-lations. A large, magnetized, z-shaped clump, where the Maxwellstress is enhanced, extends throughout the flow (bottom panel ofFigure 17). The irregular shape of the clump suggests it is a non-equilibrium structure. Perhaps if the duration of the simulation waslonger it would be smoothed out. The appearance of the magne-tized clump suggestsrstrict = 170M is a better estimate for the radiiof convergence for this simulation thanrloose= 207.
The shear parameter of the flow (top panel of Figure 18) variesby about 50% between time chunks. Outside the ISCO, the shearparameter is roughly constant with radius. The epicyclic frequency(bottom panel of Figure 18) has its minimum nearr = 20M, ratherthan at the ISCO. The minimum itself is very broad and shallow,not extending much belowκ/Ω = 1. In other words, the inner edgeof the disk has moved well outside the ISCO and is highly smearedout.
The profiles ofα as a function of radius for the five timechunks are shown in the top panel of Figure 19. Outsider ≈ 20M,the profiles ofα are constant with radius, even increasing slightly.The other simulations haveα decreasing with radius. This suggests
c© 0000 RAS, MNRAS000, 000–000

16 R. F. Penna, A. S. Sadowski, A. K. Kulkarni, & R. Narayan
Figure 14. Same as Figure 1 except for simulations B (left panel) and C (right panel).
Table 6. Time chunks for simulation F
Chunk Time Range (M) tchunk/M rstrict/M rloose/M
I 3,000-6,000 3,000 35 52II 6,000-12,000 6,000 37 65III 12,000-25,000 13,000 69 90IV 25,000-50,000 25,000 109 128V 50,000-100,000 50,000 170 207
the turbulent contribution toα is not dominating even at the largestconverged radii, which is consistent with the laminar structure ofthe magnetic field lines.
The bottom panel of Figure 19 shows the ratio of Maxwell toReynolds stress as a function of radius for the five time chunks.For the first two time chunks, the Maxwell stress is an order ofmagnitude larger than the Reynolds stress at all radii. During thefinal three time chunks, the ratio appears to have stabilizedout tor = 40M. At larger radii, the Maxwell stress is enhanced by thenon-equilibrium, magnetized, z-shaped clump noted earlier.
Our α(r) prescription does not appear to give a good fit tothe simulation F results (Figure 20). This is probably because thesimulation is mostly laminar at all radii (as shown by Figure15),whereas ourα(r) prescription assumes turbulence dominates thestress beyond the innermost radii. For simulations A–E, this is agood assumption provided the disk region of the flow is distin-guished from the coronal regions. However, the entire domain ofsimulation F is mostly laminar and highly magnetized, and soitshould perhaps be considered entirely coronal gas. It appears a dif-ferentα(r) prescription is needed to describe such highly magne-tized flows.
7 α-DISK SOLUTIONS WITH VARIABLE α(r)
In this section, we evaluate the dependence ofα-disk solutionson theα(r) prescription. The particularα-disks we consider are“slim disks” (Abramowicz et al. 1988; Sadowski 2011). We com-pare slim disk solutions with constantα = α0 to solutions withvaryingα(r), whereα(r) is defined by equation (30) and the param-eters inferred from simulation A (c.f. Table 4). That is, we considera non-spinning, 10 solar mass black hole, threaded with a magneticflux Υ = 0.6. The viscosity parameters areα0 = 0.025, n = 6,α1 = 100, andrB = 6M. We consider two different accretion rates:30% Eddington and Eddington.
Figure 21 shows our results. At large radii,α(r) converges toα0, so the solutions with constant and varyingα(r) are the sameto within a percent. Inside the ISCO, the fluid plunges towardtheblack hole with little dissipation, so in the innermost regions thesolutions are again insensitive to theα prescription. Only in an in-termediate zone, between the ISCO andr ≈ 20M, does the shapeof α(r) have a significant effect. For solar mass black holes, thisregion emits predominately in X-rays and is relevant for black holespin measurements (Gou et al. 2011).
In this zone, theα(r) prescription has a largerα than the con-stantα = α0 prescription. So theα(r) prescription increases thedisk’s radial velocity by a factor of 2− 3 and lowers its central(mid-plane) temperature by about 50%. In fact, a solution accret-
c© 0000 RAS, MNRAS000, 000–000

Shakura-Sunyaev viscosity prescription 17
Figure 16. Same as Figure 5 but for simulation F. Of the six simulationswe consider, this simulation has the largest radial velocity and is the mostsub-Keplerian.
ing at the Eddington limit with varyingα(r) has the same centraltemperature as a solution accreting at 30% Eddington with constantα (c.f. Figure 21). So theα(r) prescription has a significant effect oncentral temperature. Central temperature depends on both effectivetemperature and optical depth, so the effect is really due to changesin surface density.
At low accretion rates, the disk is radiatively efficient and theeffect ofα(r) on the radiated fluxed is negligible. At high accretionrates, advection becomes important and the radiated flux shows itsdependence onα(r). At the Eddington limit, the flux from the so-lution with varyingα(r) is about 50% lower than the flux from thesolution with constantα. So flux is only affected by theα(r) pre-scription at high accretion rates.
8 DISCUSSION AND SUMMARY
Theα(r) prescription of§3 must be computed numerically. How-ever, for all practical purposes, the functionα(r) for thin disks canbe reduced to a simple analytical formula. Our simulations suggest
α(r) = 0.025
[
q(r)3/2
]6
, (q > 0), (42)
whereq(r) is given analytically by equation (24). The constant co-efficient and exponent in equation (42) are the values favored byour GRMHD simulations (c.f. Table 4). They will change as bet-ter simulation data becomes available. The free parametersare themass and spin of the black hole, which enter through equation(24)for q(r). The contribution from mean magnetic fields can be ig-nored in this approximation because mean field stresses are onlysignificant inside the ISCO, and thin disks are not sensitiveto α(r)in this region. Equations (24) and (42) thus give an analytical α(r)prescription that can be used for thin disk models (see Figure 22).The more generalα(r) prescription of§3 is needed for thick disks.
To summarize our main results, we have constructed a
Figure 17. Same as Figure 3 but for simulation F. A large, highly-magnetized, z-shaped clump persists over most of the flow inside rloose.The magnetized clump increasesα and the ratio of Maxwell to Reynoldsstress.
one-dimensional prescription forα(r) and estimated parametersfor this prescription based on data from GRMHD simulations.The fact thatα varies with radius had been anticipated longago (Pringle & Rees 1972; Shakura & Sunyaev 1973) but globalMHD simulations provide the first quantitative informationaboutthe shape ofα(r) (Papaloizou & Nelson 2003; Penna et al. 2010,2012b; Fromang et al. 2011).
Our modifiedα(r) prescription, equation (30), is the sum oftwo components. The first component describes mean field stresses.It is important in the laminar, inner regions of accretion disks,where the plunging fluid stretches the frozen-in field. Our descrip-tion of this component is based on the model of Gammie (1999),which supplies the magnetic stress as a function of radius and twofree parameters: black hole spin and the amount of magnetic fluxthreading the horizon.
The second component of theα(r) prescription describes tur-bulent stresses. As emphasized by Pessah et al. (2006b),α dependson the shear parameter,q. In Newtonian gravity, Keplerian flow hasa constant shear parameter,q = 3/2, but general relativistic correc-tions give even Keplerian disks around black holes a varyingq(r),as discussed in§2. The shear parameter increases fromq = 3/2 atthe outer edge of the disk toq = 2 at the inner edge of the disk.This is a 50% change inq but it creates a larger variation inα, be-
c© 0000 RAS, MNRAS000, 000–000

18 R. F. Penna, A. S. Sadowski, A. K. Kulkarni, & R. Narayan
Figure 18. Same as Figure 6 but for simulation F.
Figure 19. Same as Figure 8 but for simulation F.
causeα goes asqn (for q > 0). Our GRMHD simulations are toonoisy to infern precisely, but the data seem to prefern ≈ 6. Thisis consistent with the simulations of Pessah et al. (2006b),whichresulted inn between 2 and 8. Analytical MHD closure models forthe MRI also allown between 2 and 8 (Kato & Yoshizawa 1993,1995; Ogilvie 2003; Pessah et al. 2006a,b, 2008).
Simple extensions of the standardα prescription and someclosure models predict negativeα for q < 0 (Kato & Yoshizawa1993, 1995; Ogilvie 2003). An exception is the closure modelofPessah et al. (2006a,b). Data from shearing box simulationsshowzero turbulent stress forq < 0 (Pessah et al. 2008). Our simulations
Figure 20. The dimensionless viscosity parameter,α, of simulation F as afunction of radius. We have been unable to find a good fit to the simulationdata using ourα(r) prescription.
Figure 21. Slim disk solutions with varyingα(r) (solid curves) and withconstantα = 0.025 (dashed curves), for the parameters inferred from simu-lation A (c.f. 4). Solutions are shown at the Eddington accretion rate (bluecurves) and at 30% Eddington (red curves).Top panel: Radial velocity asa function of radius. Solutions with varyingα(r) have larger radial veloc-ities. Middle panel: Midplane temperature (not effective temperature) as afunction radius. Solutions with varyingα(r) are colder in the X-ray emit-ting portions of the flow.Bottom panel: Radiant flux as a function of radius.Radiant flux is affected byα(r) only at high accretion rates.
c© 0000 RAS, MNRAS000, 000–000

Shakura-Sunyaev viscosity prescription 19
Figure 22. Analyticalα(r) prescription defined by equation (42) fora/M =0 (solid red curve). This model gives a good fit to data from Simulation A.Data from insiderstrict are marked with filled circles, data from betweenrstrict andrloose are marked with open circles, and data from outsiderloose
are marked with crosses (c.f.§5.5).
are consistent with this data, although they are not as decisive onthis point because negative shear parameters are only foundinsideroughly the photon orbit, where mean field stresses are large. Ourprescription forα(r) is always positive and the turbulent contribu-tion vanishes forq < 0. The mean field term in ourα(r) prescriptiongives a good description of our simulation data in regions near theblack hole whereq < 0.
We have discussed accretion onto black holes. When a diskaccretes onto a star, a boundary layer forms between the staranddisk. It can generate half the accretion luminosity in soft X-rays(Pringle 1977). The boundary layer in stellar accretion is similarto the region inside the ISCO in black hole accretion. In bothre-gions, the angular velocity is non-Keplerian and the shear ampli-fies the magnetic field (Armitage 2002; Steinacker & Papaloizou2002). Steinacker & Papaloizou (2002) foundα(r) profiles in MHDsimulations of boundary layers that are similar to ourα(r) profilesinside the ISCO. It would be interesting to extend theα(r) prescrip-tion to these cases.
We analyzed data from six GRMHD accretion disk simula-tions. Three of the simulations are thin, radiatively efficient accre-tion disks (simulations A, B, and C). The other three are geomet-rically thick, radiatively inefficient accretion flows (simulations D,E, and F). The simulations vary in resolution from 256× 64× 32to 256× 128× 64. Two of the simulations describe spinning blackholes, with spin parametera/M = 0.7 (simulations B and E) andthe others describe non-spinning black holes. MRI driven turbu-lence and large scale magnetic fields generate stresses in the sim-ulated disks self-consistently, so theα viscosity prescription is notassumed. Instead, we measureα(r) from the simulation data.
For each simulation, we measureα(r) = T rφ/ptot and compareit against theα(r) prescription. Thin accretion disks are easier to de-scribe with theα(r) prescription than thick accretion disks becausethey have a sharp transition at the ISCO that creates two distinct
regions: a magnetically dominated region inside the ISCO, and aweakly magnetized, turbulent region outside the ISCO. Thisdis-tinction is blurred in thick accretion disks by the large radial veloc-ity of the flow. So some of the simplifications in theα(r) prescrip-tion are less applicable. Simulation F, in which a large magneticflux was allowed to build up on the hole, is particularly difficult tointerpret because turbulence is almost completely absent.
We were careful to only include fluid which has reached aquasi-steady state. The timescale to reach quasi-steady state scalesas the inverse of radial velocity, and is thus an increasing functionof radius. So the inner regions of disks converge before the outer re-gions. Thin accretion disks have smaller radial velocitiesthan thickaccretion disks, so thin disk simulations are only converged out tor ≈ 10M rather thanr ≈ 100M.
For further insight into the simulations, we analyzed theirshear parameters and epicyclic frequencies. Outside the ISCO, theshear parameters of the simulations are usually within 20% of theKeplerian prediction. Inside the ISCO, the shear parameterturnsover, going to zero near the photon orbit atr = 3M where theangular velocity peaks. So the turbulent contribution toα, whichscales asqn (for q > 0), is unimportant near the black hole.
The epicyclic frequency of the flow is also close to the Kep-lerian value outside the ISCO. The inner edge of the flow can beidentified with the minimum inκ(r), the radius where the flow ismost unstable. This is usually near the ISCO, although when thedisk is thick the inner edge is smeared out by the large radialveloc-ity of the flow.
Finally, we considered the effect of theα(r) prescription onα-disk solutions. We compared solutions with varyingα(r) to solu-tions with constantα = α0. We fixed the free parametersα0, α1, n,andrB using the values inferred from simulation A (c.f. Table 4).The differences between varying and constantα are only significantin the region between the ISCO andr ≈ 20M. At smaller radii, thegas is plunging too quickly for stresses to act, soα does not en-ter, and at larger radii the varyingα(r) prescription is converging toα = α0. In the intermediate zone between the ISCO andr ≈ 20M,the solutions with varyingα(r) have largerα than the solutions withconstantα. This increases their radial velocity and lowers their cen-tral temperature and radiant flux. The effect on central temperatureis most significant. A solution accreting at the Eddington rate withradially varyingα(r) has the same central temperature as a solutionaccreting at 30% Eddington with constantα. Central (mid-plane)temperature depends on both the effective temperature and the op-tical depth, so the effect is really due to changes in surface density.The effect ofα on the radiant flux is only important at high accre-tion rates.
The main shortcomings of ourα(r) prescription are the ab-sence of gas pressure in the prescription for the mean magnetic fieldcomponent, and the absence of magnetic fields in the prescriptionfor the turbulent component. For thin, weakly magnetized disksthese are better assumptions than for thick or highly magnetizeddisks because the two components do not overlap significantly inthe disk.
The simulations are limited by their duration, which prevents alarge range of radii from reaching quasi-steady state. Theyare alsolimited by their resolution. The fastest growing mode of theMRI isusually not resolved by more than about 10 grid cells (Penna et al.2010; Narayan et al. 2012) which is only marginally acceptable(Shiokawa et al. 2012; Sorathia et al. 2012). Despite these limita-tions, these are among the best GRMHD accretion disk simulationsavailable at present. Shearing box simulations can resolvethe localphysics of the MRI better, but cannot obtain the dependence of α
c© 0000 RAS, MNRAS000, 000–000

20 R. F. Penna, A. S. Sadowski, A. K. Kulkarni, & R. Narayan
on radius explicitly. Nonetheless, the shearing box simulations ofPessah et al. (2008) should be revisited with higher resolution (theyused 32× 192× 32), as these are the best way to measure the de-pendence ofα on q.
Our results suggest that relativistic corrections toq partlycontribute to the higherα’s measured in GRMHD simulations(Penna et al. 2010, 2012b) compared to Newtonian simulations(Papaloizou & Nelson 2003; Fromang et al. 2011). Assumingα ∝q6 (for q > 0), we infer thatα is six times larger in the relativis-tic inner regions of GRMHD disks than in Newtonian disks. Thispartly resolves the discrepancy but does not go far enough, as theα’s measured from GRMHD simulations are over an order of mag-nitude larger than theα’s measured from Newtonian MHD simula-tions. More work is needed to understand this discrepancy.
Switching from a constantα to a radially varyingα(r) wouldhave a small effect on black hole spin estimates. Gou et al. (2011)considered the effect on continuum fitting measurements of the spinof the black hole in Cyg X-1 if one assumesα = 0.01 versusα = 0.1. The black hole spin decreases slightly, froma/M = 0.9988to 0.9985, asα is increased. Switching from a constantα to theα(r) prescription will have a similar effect. This is well below thecurrent observational sources of error in black hole spin measure-ments (Kulkarni et al. 2011; Zhu et al. 2012), so it is not a concernfor now.
Black hole spin estimates are restricted to observations ofdisks radiating below 30% of the Eddington limit, which corre-sponds to thin disks (h/r ∼ 0.1, Kulkarni et al. 2011). Observationsbased on models of thick disks will be more sensitive to the shapeof α(r).
ACKNOWLEDGMENTS
We thank Eric Blackman for discussions. This work was sup-ported in part by NASA grant NNX11AE16G and NSF grant AST-0805832. The simulations presented in this work were performedin part on the Pleiades supercomputer, using resources providedby the NASA High-End Computing (HEC) Program through theNASA Advanced Supercomputing (NAS) Division at Ames Re-search Center. We also acknowledge NSF support via XSEDE re-sources at NICS Kraken and LoneStar.
REFERENCES
Abramowicz M., Brandenburg A., Lasota J. P., 1996, MNRAS,281, L21
Abramowicz M. A., Czerny B., Lasota J. P., Szuszkiewicz E.,1988, ApJ, 332, 646
Agol E., Krolik J. H., 2000, ApJ, 528, 161Armitage P. J., 1998, ApJ, 501, L189Armitage P. J., 2002, MNRAS, 330, 895Balbus S. A., 2012, MNRAS, 423, L50Balbus S. A., Hawley J. F., 1991, ApJ, 376, 214Balbus S. A., Hawley J. F., 1998, Reviews of Modern Physics, 70,1
Bardeen J. M., Press W. H., Teukolsky S. A., 1972, ApJ, 178, 347Beckwith K., Hawley J. F., Krolik J. H., 2008, MNRAS, 390, 21Blackman E. G., Penna R. F., Varniere P., 2008, New Astronomy,13, 244
Brandenburg A., 2001, ApJ, 550, 824
Brandenburg A., Nordlund A., Stein R. F., Torkelsson U., 1995,ApJ, 446, 741
Chandrasekhar S., 1960, Proceedings of the National Academy ofScience, 46, 253
Davis S. W., Stone J. M., Pessah M. E., 2010, ApJ, 713, 52De Villiers J. P., Hawley J. F., Krolik J. H., 2003, ApJ, 599, 1238Fromang S., Lyra W., Masset F., 2011, A&A, 534, A107Fromang S., Papaloizou J., 2007, A&A, 476, 1113Gammie C. F., 1999, ApJ, 522, L57Gammie C. F., 2004, ApJ, 614, 309Gammie C. F., McKinney J. C., Toth G., 2003, ApJ, 589, 444Godon P., 1995, MNRAS, 277, 157Gou L., McClintock J. E., Reid M. J., et al., 2011, ApJ, 742, 85Guan X., Gammie C. F., Simon J. B., Johnson B. M., 2009, ApJ,694, 1010
Hawley J. F., 2000, ApJ, 528, 462Hawley J. F., Balbus S. A., 1991, ApJ, 376, 223Hawley J. F., Balbus S. A., Winters W. F., 1999, ApJ, 518, 394Hawley J. F., Gammie C. F., Balbus S. A., 1995, ApJ, 440, 742Hawley J. F., Gammie C. F., Balbus S. A., 1996, ApJ, 464, 690Hawley J. F., Krolik J. H., 2001, ApJ, 548, 348Kato S., Yoshizawa A., 1993, PASJ, 45, 103Kato S., Yoshizawa A., 1995, PASJ, 47, 629Krolik J. H., 1999, ApJ, 515, L73Krolik J. H., Hawley J. F., Hirose S., 2005, ApJ, 622, 1008Kulkarni A. K., Penna R. F., Shcherbakov R. V., et al., 2011, MN-RAS, 414, 1183
Lesur G., Longaretti P. Y., 2007, MNRAS, 378, 1471Machida M., Hayashi M. R., Matsumoto R., 2000, ApJ, 532, L67Matsumoto R., 1999, in Numerical Astrophysics, edited by S.M.Miyama, K. Tomisaka, T. Hanawa, vol. 240 of Astrophysics andSpace Science Library, 195
McKinney J. C., 2006, MNRAS, 367, 1797McKinney J. C., Blandford R. D., 2009, MNRAS, 394, L126Narayan R., Igumenshchev I. V., Abramowicz M. A., 2003, PASJ,55, L69
Narayan R., Sadowski A., Penna R. F., Kulkarni A. K., 2012, MN-RAS, 426, 3241
Narayan R., Yi I., 1994, ApJ, 428, L13Novikov I. D., Thorne K. S., 1973, in Black holes (Les astresocclus), p. 343 - 450, 343–450
Ogilvie G. I., 2003, MNRAS, 340, 969Papaloizou J. C. B., Nelson R. P., 2003, MNRAS, 339, 983Penna R. F., Kulkarni K., Narayan R., 2012a, Submitted to A&APenna R. F., McKinney J. C., Narayan R., Tchekhovskoy A.,Shafee R., McClintock J. E., 2010, MNRAS, 408, 752
Penna R. F., Sadowski A., McKinney J. C., 2012b, MNRAS, 420,684
Pessah M. E., Chan C. K., Psaltis D., 2006a, Physical Review Let-ters, 97, 22, 221103
Pessah M. E., Chan C. K., Psaltis D., 2006b, MNRAS, 372, 183Pessah M. E., Chan C. K., Psaltis D., 2007, ApJ, 668, L51Pessah M. E., Chan C. K., Psaltis D., 2008, MNRAS, 383, 683Pringle J. E., 1977, MNRAS, 178, 195Pringle J. E., King A. R., 2007, Astrophysical flowsPringle J. E., Rees M. J., 1972, A&A, 21, 1Sano T., Inutsuka S. I., Turner N. J., Stone J. M., 2004, ApJ, 605,321
Shakura N. I., Sunyaev R. A., 1973, A&A, 24, 337Shiokawa H., Dolence J. C., Gammie C. F., Noble S. C., 2012,ApJ, 744, 187
Simon J. B., Hawley J. F., 2009, ApJ, 707, 833
c© 0000 RAS, MNRAS000, 000–000

Shakura-Sunyaev viscosity prescription 21
Sadowski A., 2011, Slim accretion disks around black holes,Ph.D. thesis, Nicolaus Copernicus Astronomical Center, War-saw, Poland
Sorathia K. A., Reynolds C. S., Stone J. M., Beckwith K., 2012,ApJ, 749, 189
Steinacker A., Papaloizou J. C. B., 2002, ApJ, 571, 413Stone J. M., Balbus S. A., 1996, ApJ, 464, 364Taylor G. I., 1936, Royal Society of London Proceedings SeriesA, 157, 546
Tchekhovskoy A., Narayan R., McKinney J. C., 2011, MNRAS,418, L79
Velikhov E. P., 1959, J. Exptl. Theoret. Phys., 36, 1398Zhu Y., Davis S. W., Narayan R., Kulkarni A. K., Penna R. F.,McClintock J. E., 2012, MNRAS, 424, 2504
c© 0000 RAS, MNRAS000, 000–000