The (1,2)-skew Brownian motion: an explicit representation...
21
The generalized RS scheme The (β 1 ,β 2 )-skew BM Sketch of the proofs References The (β 1 ,β 2 )-skew Brownian motion: an explicit representation of its transition densities and its exact simulation Sara Mazzonetto (Universit¨ at Potsdam and Universit´ e Lille 1) joint work with Sylvie Roelly and David Dereudre Les Houches, April 21 st 2016
Transcript of The (1,2)-skew Brownian motion: an explicit representation...

The generalized RS scheme The (β1, β2)-skew BM Sketch of the proofs References
The (β1, β2)-skew Brownian motion: an explicitrepresentation of its transition densities and its
exact simulation
Sara Mazzonetto(Universitat Potsdam and Universite Lille 1)
joint work with Sylvie Roelly and David Dereudre
Les Houches, April 21st 2016

The generalized RS scheme The (β1, β2)-skew BM Sketch of the proofs References
Index
1 The generalized RS scheme
2 The (β1, β2)-skew BM
3 Sketch of the proofs

The generalized RS scheme The (β1, β2)-skew BM Sketch of the proofs References
Generalized rejection sampling method
Rejection sampling methodAssume to know how to sample the r.v. Y with density g(x).Then one can sample the r.v. X with density h(x) if:
(i) ∃M > 0 such that h(x) ≤ Mg(x) for all x ∈ R;
(ii) f (x) := 1M
h(x)g(x) can be evaluated.
X(d)= (Y |U < f (Y )) i.e. an exact simulation is possible.
Theorem
Replacing (ii) by
(ii’) there exists a sequence of functions (fn)n converging pointwise to fat a decreasing rate (δn)n.Moreover for each x ∈ R fn(x), δn(x) can be evaluated,
then X(d)= (Y |∃n;U < fn(Y )− δn(Y )).

The generalized RS scheme The (β1, β2)-skew BM Sketch of the proofs References
Toy example
Suppose p is an unknown parameter such that
∃(pn)n, (δn)n s.t. δnn→∞→ 0 decreasing, and |p − pn| < δn.
Then it is possible to simulate exactly a Bernoulli of parameter p sinceX := 1{∃n; |U−pn|>δn, U<pn} ∼ Bp .
0 1pu pn
pn − δn pn + δn
0 1p u′pn
pn − δn pn + δn

The generalized RS scheme The (β1, β2)-skew BM Sketch of the proofs References
Heuristics on the (β1, β2)-skew BM
Let β1, β2 ∈ [−1, 1]
1+β1
21−β1
2
0
1+β2
21−β2
2
1
Example: y 7→ p(0.3,0.7)(1, 0.5, y) is the density of X1 where (Xt)t is the(0.3, 0.7)−SBM starting at 0.5.

The generalized RS scheme The (β1, β2)-skew BM Sketch of the proofs References
Heuristics on the (β1, β2)-skew BM
Let β1, β2 ∈ [−1, 1]
1+β1
21−β1
2
0
1+β2
21−β2
2
1
Example: y 7→ p(0.3,0.7)(1, 0.5, y) is the density of X1 where (Xt)t is the(0.3, 0.7)−SBM starting at 0.5.

The generalized RS scheme The (β1, β2)-skew BM Sketch of the proofs References
The (β1, β2)-SBM with drift
The process is defined for β1, β2 ∈ [−1, 1], µ ∈ R, z1, z2 ∈ R,
through the SDE, by{dXt = dWt + µdt + β1dL
z1t (X ) + β2dL
z2t (X );
Lzit (X ) =∫ t
0I{Xs=zi}dL
zis (X )
the infinitesimal generator is Lf = 12 ∆f +µ∇f +
∑j=1,2 βj〈δzj ,∇f 〉.
Lemma (Divergence form operator)L = 1
2h(x)∇ (h(x)∇)
Dom(L) ={f ∈ H1
0 (h(x)dx); h∇f ∈ H1(h−1(x)dx)}
h(x) = e2µxk(x)
where k(x) =
14 (1− β1)(1− β2) x < z1,14 (1 + β1)(1− β2) z1 ≤ x < z2,14 (1 + β1)(1 + β2) x ≥ z2.

The generalized RS scheme The (β1, β2)-skew BM Sketch of the proofs References
The transition densities of the (β1, β2)-SBM
Proposition
p(β1,β2)(t, x , y) = p(0,0)(t, x , y) · v (β1,β2)(t, x , y)
where, if z = z2 − z1,
v (β1,β2)(t, x , y) =∞∑k=0
(−β1β2)k4∑
j=1
cj(y)e−(aj (x,y)+2zk)2
2t e−|x−y |aj (x,y)+2zk
t
c1(y) ≡ 1
c2(y) =(21[z1,+∞)(y)− 1
)β1
c3(y) =(21[z2,+∞)(y)− 1
)β2
c4(y) =(1− 21[z1,z2)(y)
)β1β2
a1(x , y) ≡ 0
a2(x , y) = |y − z1|+ |x − z1| − |y − x |a3(x , y) = |y − z2|+ |y − z2| − |y − x |a4(x , y) = 2 (z2 −max(x , y , z1))+ + 2 (min(x , y , z2)− z1)+

The generalized RS scheme The (β1, β2)-skew BM Sketch of the proofs References
Application of the GRS method
Lemma
There exists an upper bound for v (β1,β2)(t, x , y) uniform in x and y :
supx,y∈R
∣∣∣v (β1,β2)(t, x , y)∣∣∣ ≤ v t :=
(1 + |β1|)(1 + |β2|)1− |β1β2|e−
2z2
t
Lemma
The remainder of the truncated series is bounded uniformly in x , y :
|RNv (β1,β2)(t, x , y)| ≤ v t
(|β1β2|e−
2z2
t
)N+1
.

The generalized RS scheme The (β1, β2)-skew BM Sketch of the proofs References
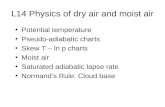
Approximation Vs generalized rejection sampling method
In the simulation we fix t = 1 and barriers z1 = 0 and z2 = 1, moreoverwe will sample 50000 times with GRSM y 7→ p(−0.7,0.3)(1, 0.5, y)
The 50000 simulations through GRS method are EXACT and the densityis approximated with its truncation at the 10th term.

The generalized RS scheme The (β1, β2)-skew BM Sketch of the proofs References
Asymmetric cases with β1β2 > 0 and β1β2 < 0
y 7→ p(0.3,−0.7)(1, 0.5, y) y 7→ p(−0.8,−0.6)(1, 0.5, y)

The generalized RS scheme The (β1, β2)-skew BM Sketch of the proofs References
Reflected skew Brownian motion and only one barrier
y 7→ p(1,−0.5)(1, 0.5, y) y 7→ p(0,−0.5)(1, 0.5, y)

The generalized RS scheme The (β1, β2)-skew BM Sketch of the proofs References
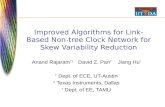
Simulation of the process (0.7,−0.2)-SBM
Assume the initial condition X0 = 0.5
t
Xt

The generalized RS scheme The (β1, β2)-skew BM Sketch of the proofs References
The transition density for the (β1, β2)-SBM with drift
Main result:Assume β1, β2 ∈ (−1, 1) and µ ∈ R.
p(β1,β2)µ (t, x , y) = p(0,0)
µ (t, x , y)v (β1,β2)µ (t, x , y)
where the function v(β1,β2)µ is given by a series of Fourier transforms. It is
a series involving two functions{J0(ω, βiµ
√t) := e−
ω2
2
√2πe
(βiµ√
t+ω)2
2 Φc(ω + βiµ√t) with i ∈ {1, 2}
J1(ω) := −e−ω2
2 ,
evaluated in ω ∈{ωj,k :=
aj (x,y)+2zk+|y−x|√t
, j = 1, 2, 3, 4, k ∈ N}
.

The generalized RS scheme The (β1, β2)-skew BM Sketch of the proofs References
Representation of the transition density
Proposition
The infinitesimal generator L is self adjoint in L2(h(x)dx), and thefollowing equality holds:
p(β1,β2)µ (t, x , y) =
1
2πi
∫Γ
eλtG (β1,β2)µ (x , y ;λ)dλ,
where Γ is a complex contour of σ(L) ⊆ (−∞, 0] and
for y ∈ R and λ ∈ C \ (−∞, 0], x 7→ G(β1,β2)µ (x , y ;λ), the Green’s
function for the resolvent, solves{(λ− L)u(x) = δ{y}(x), u ∈ C2(R \ {z1, z2}) ∩ C(R)
h(z+i )u′(z+
i ) = h(z−i )u′(z−i ), i = 1, 2.
This is known as the Titchmarsh-Kodaira-Yoshida method (µ = 0).

The generalized RS scheme The (β1, β2)-skew BM Sketch of the proofs References
The Green function for the (β1, β2)-SBM with drift
Lemma
The Green functions, if w :=√
2λ+ µ2 ∈ {v ∈ C;<(v) > 0}, are
G (x , y ;w) =1
weµ(y−x)
∑4j=1 cj(µ, y ;w)e−w(aj (x,y)+|x−y |)
β1β2e−2wz(w2 − µ2) + (w + β1µ)(w + β2µ).
cj(µ, y ;w) = w2cj,0(y) + wµcj,1(y) + µ2cj,2(y), wherec1,0 = 1,
c2,0 =(21[z1,+∞)(y)− 1
)β1
c3,0 =(21[z2,+∞)(y)− 1
)β2
c4,0 =(1− 21[z1,z2)(y)
)β1β2
c1,1 = β1 + β2
c2,1 = −β1 − c4,0
c3,1 = −β2 + c4,0
c4,1 = 0
c1,2 = β1β2
c2,2 = β1c3,0
c3,2 = −β2c2,0
c4,2 = −c4,0.

The generalized RS scheme The (β1, β2)-skew BM Sketch of the proofs References
Ideas of the proof
If φ(λ) =√
2λ+ µ2, we recall the contour integral representation
p(β1,β2)µ (t, x , y) =
1
2πi
∫Γ
eλtG (β1,β2)µ (x , y ;φ(λ))dλ,
and we will use techniques of complex analysis:
R
iR
Γ
φ(Γ)
R
No poles
φ(Γ)
ρM
|µ|−βµ

The generalized RS scheme The (β1, β2)-skew BM Sketch of the proofs References
Towards a series of Fourier transforms
For simplicity β1µ > 0, β2µ > 0, hence there is no pole.The formula for vµ
(β1,β2)(t, x , y) is
√t√
2πe
(x−y)2
2t
∫Re−
u2
2 t
∑4j=1−cj(µ, y ; iu)e−iu(aj (x,y)+|x−y |)
β1β2e−i2zu(u2 + µ2) + (u − iβ1µ)(u − iβ2µ)du.
Remark
For all u, µ ∈ R and β1, β2 ∈ (−1, 1)
|β1β2| (u2 + µ2) ≤ |(u − iβ1µ)(u − iβ2µ)|
Therefore
1
1 + β1β2(u2+µ2)e−i2zu
(u−iβ1µ)(u−iβ2µ)
=∞∑k=0
(−β1β2(u2 + µ2)
(u − iβ1µ)(u − iβ2µ)
)k
e−i2zuk

The generalized RS scheme The (β1, β2)-skew BM Sketch of the proofs References
Density’s uniform bound
Under the assumption β1µ > 0, β2µ > 0,v(β1,β2)µ (t, x , y) = e
|x−y|22t∑∞
k=0
∑4j=1 Fj,k(ωj,k), ωj,k :=
aj (x,y)+2zk+|y−x|√t
Fj,k := (−β1β2)k F(w 7→ e−
w2
2 cj(y , µ√t; iw) · −(w2+µ2t)k
(w−iβ1µ√t)k+1(w−iβ2µ
√t)k+1
).
Lemma
There exists an upper bound for v(β1,β2)µ (t, x , y) uniform in x and y :
supx,y∈R
∣∣∣v (β1,β2)µ (t, x , y)
∣∣∣ ≤ C (β1, β2)
1− e−2z2
t
|RNv (β1,β2)µ (t, x , y)| ≤ C (β1, β2)
1− e−2z2
t
e−2z2
t (N+1).

The generalized RS scheme The (β1, β2)-skew BM Sketch of the proofs References
Remerciements
Merci pour votre attention!

The generalized RS scheme The (β1, β2)-skew BM Sketch of the proofs References
Bibliography
[1] David Dereudre, Sara Mazzonetto, and Sylvie Roelly. Exactsimulation of one-dimensional brownian diffusions with driftadmitting several jumps. Preprint.
[2] David Dereudre, Sara Mazzonetto, and Sylvie Roelly. An explicitrepresentation of the transition densities of the skew brownian motionwith drift and two semipermeable barriers. Monte Carlo MethodsAppl., 22(1):1–23, 2016.
[3] Pierre Etore and Miguel Martinez. Exact simulation for solutions ofone-dimensional stochastic differential equations with discontinuousdrift. ESAIM Probab. Stat., 18:686–702, 2014.
[4] Bernard Gaveau, Masami Okada, and Tatsuya Okada. Second orderdifferential operators and Dirichlet integrals with singular coefficients.I. Functional calculus of one-dimensional operators. Tohoku Math. J.(2), 39(4):465–504, 1987.
[5] Antoine Lejay, Lionel Lenotre, and Geraldine Pichot. One-dimensionalskew diffusions: explicit expressions of densities and resolvent kernel,2015, hal-01194187.