Sym etrie et unicit e par des m ethodes de ots non-lin eaires
Upload
ramalingam-palaniCategory
view
32download
1
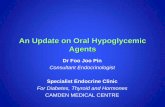
SYNCHRONOUS MOTORS

Salient Pole Synchronous machine

Synchronous machine with a cylindrical round-rotor

Basic PrincipleA 3-Φ supply is applied to the stator of the motor which produces a 3-Φ current flow in the winding.
This current results a magnetic flux of constant magnitude rotating at synchronous speed.
The field winding is excited by dc current which produces steady state magnetic field
Now there two magnetic field present in the motor :Rotor filed Stator field
Both field will tend to line up each other just like two bar magnets will tend to line up if place near each other.

Basic Principle
The stator magnetic field is rotating so the rotor magnetic field will try to catch up.
Due to inertia of the rotor and also inertia of the load connected to the rotor it can never catch up the stator field but always lags behind it .
The greater the angle between the two magnetic fields greater will be the torque on the rotor.
A synchronous motor is not a self starting motor because torque is only developed when running at synchronous speed, therefore ,the motor needs some type of device to bring the rotor to synchronous speed

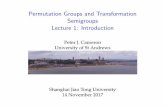
SYNCHRONOUS MOTORS-operation
The squirrel-cage Amortisseur winding in the rotor produces Starting Torque and Accelerating Torque to bring the synchronous motor up to speed.
When the motor speed reaches approximately 97% of nameplate RPM, the DC field current is applied to the rotor producing Pull-in Torque and the rotor will pull-in -step and “synchronize” with the stator. The motor will run at synchronous speed and produce Synchronous Torque.

SYNCHRONOUS MOTORS-Characteristics
A three-phase stator similar to that of an induction motor.
A wound rotor (rotating field) which has the same number of poles as the stator, and is supplied by an external source of direct current (DC).
The rotor current establishes a north/south magnetic pole relationship in the rotor poles enabling the rotor to “lock-in-step” with the rotating stator flux.
Starts as an induction motor. The synchronous motor rotor also has a squirrel-cage winding, known as an Amortisseur winding, which produces torque for motor starting.

Advantages
Precise speed regulation makes the synchronous motor an ideal choice for certain industrial processes and as a prime mover for generators.
Synchronous motors have speed / torque characteristics which are ideally suited for direct drive of large horsepower, low-rpm loads such as reciprocating compressors.
Synchronous motors operate at an improved power factor, thereby improving overall system power factor and eliminating or reducing utility power factor penalties. An improved power factor also reduces the system voltage drop and the voltage drop at the motor terminals


SYNCHRONOUS RELUCTANCE MOTOR

RELUCTANCE MOTOR
A reluctance motor is an electric motor in which torque is produced by the tendency of its moveable part to move to a position where inductance of the excited winding is maximized.

SYNCHRONOUS RELUCTANCE MOTOR-CONSTRUCTIONAL FEATURES
Conventional three-phase sinusoidally distributed windings on the stator.
No source of flux on the rotor, but instead the rotor is designed to distort the flux density distribution produced by the sinusoidally distributed mmf.
The stator windings generate a spatial sinusoidally distributed magnetomotive force (mmf) in the airgap between the stator and the rotor, and under steady-state conditions the rotor rotates in synchronism with this field.
A Syncrel is absolutely dependent on an intelligent inverter drive in order to start the machine and to stabilize it when running.

SYNCHRONOUS RELUCTANCE MOTOR-CONSTRUCTIONAL FEATURES

SYNCHRONOUS RELUCTANCE MOTOR-CONSTRUCTIONAL FEATURES

SYNCHRONOUS RELUCTANCE MACHINE-STRUCTURE

ADVANTAGES
The Syncrel has the advantage over the switched-reluctance machine in that it produces relatively smooth torque naturally, and it uses a conventional three-phase inverter.
Simplicity of control
Potential for improved efficiency and torque density
Due to absence of field winding air gap flux is produced by magnetising current drawn from the source.
Poor Power factor

RADIALLY LAMINATED-SYNCHRONOUS RELUCTANCE MOTOR

RADIALLY LAMINATED-SYNCHRONOUS RELUCTANCE MOTOR
-Similar to Standard Radial Laminations
-Laminations are stacked onto the shaft
-Punched areas are filled with plastic materials for extra strength
-Best potential for economic production
-Improvement in design can make the performance similar to axial lamination

AXIALLY LAMINATED-SYNCHRONOUS RELUCTANCE MOTOR

AXIALLY LAMINATED-SYNCHRONOUS RELUCTANCE MOTOR
-Constructed with laminations running the length of the motor
-Between laminations non-magnetic packing is used
-Axial laminations are stacked on top of each other and a non-magnetic pole piece is bolted on top of the stack to hold the laminations
-Best performance
-Mass production difficult

Synchronous Reluctance Types

Synchronous Reluctance Motor

Synchronous Reluctance Hybrid Motor

The rotor magnetic axis is called direct axis and the principal path of the flux is through the magnets.
The permeability of high-flux-density permanent magnets is almost that of the air. This results in the magnet thickness becoming an extension of air gap by that amount.
The stator inductance when the direct axis or magnets are aligned with the stator winding is known as direct axis inductance.
Reactance

By rotating the magnets from the aligned position by 90 degrees, the stator flux sees the interpolar area of the rotor containing only the iron path and the inductance measured in this position is referred to as quadrature axis inductance.
The direct-axis reluctance is greater than the quadrature-axis reluctance because the effective air gap of the direct axis is multiple times that of the actual air gap seen by the quadrature axis.
Reactance

The consequence of such an unequal reluctance is that
where Ld is the inductance along the magnet axis (i.e.. direct axis) and Lq is the inductance along an axis in quadrature to the magnet axis.
This is quite contrary to the wound-rotor salient-pole synchronous machine.

Synchronous Reluctance Hybrid Motor
Magnetization
Demgnetization

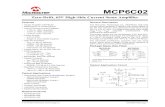
Synchronous Reluctance Hybrid Motor-Circle Diagram
Current Locus
Voltage Locus

Synchronous Reluctance Hybrid Motor-Circle Diagram

Synchronous Reluctance Hybrid Motor-Circle Diagram

Torque Speed Characteristics

DRIVE SYSTEM with rotor position detection based on currentmeasurements

Control Structure for SYNCREL

Control Structure for SYNCREL