Stochastic Interface Models - 東京大学funaki/SF/StF-Funaki-03.pdfStochastic Interface Models 5...
168
Stochastic Interface Models Tadahisa Funaki Graduate School of Mathematical Sciences, The University of Tokyo, Komaba, Tokyo 153-8914, JAPAN [email protected] http://www.ms.u-tokyo.ac.jp/~funaki/ Summary. In these notes we try to review developments in the last decade of the theory on stochastic models for interfaces arising in two phase system, mostly on the so-called ∇ϕ interface model. We are, in particular, interested in the scaling limits which pass from the microscopic models to macroscopic level. Such limit procedures will be formulated as classical limit theorems in probability theory such as law of large numbers, central limit theorem and large deviation principles. Key words: Random interfaces, Effective interfaces, Phase coexistence and sepa- ration, Ginzburg-Landau model, Massless model, Random walk representation, Sur- face tension, Wulff shape, Hydrodynamic limit, Motion by mean curvature, Evolu- tionary variational inequality, Fluctuations, Large deviations, Free boundaries. Lecture Notes for the International Probability School at Saint-Flour, 2003 2000 Mathematics Subject Classification: 60-02 (60K35, 60H30, 60H15), 82-02 (82B24, 82B31, 82B41, 82C24, 82C31, 82C41), 35J20, 35K55, 35R35
Transcript of Stochastic Interface Models - 東京大学funaki/SF/StF-Funaki-03.pdfStochastic Interface Models 5...

Stochastic Interface Models
Tadahisa Funaki
Graduate School of Mathematical Sciences, The University of Tokyo, Komaba,Tokyo 153-8914, JAPAN [email protected]
http://www.ms.u-tokyo.ac.jp/~funaki/
Summary. In these notes we try to review developments in the last decade of thetheory on stochastic models for interfaces arising in two phase system, mostly on theso-called ∇ϕ interface model. We are, in particular, interested in the scaling limitswhich pass from the microscopic models to macroscopic level. Such limit procedureswill be formulated as classical limit theorems in probability theory such as law oflarge numbers, central limit theorem and large deviation principles.
Key words: Random interfaces, Effective interfaces, Phase coexistence and sepa-ration, Ginzburg-Landau model, Massless model, Random walk representation, Sur-face tension, Wulff shape, Hydrodynamic limit, Motion by mean curvature, Evolu-tionary variational inequality, Fluctuations, Large deviations, Free boundaries.
Lecture Notes for the International Probability School at Saint-Flour, 20032000 Mathematics Subject Classification: 60-02 (60K35, 60H30, 60H15), 82-02(82B24, 82B31, 82B41, 82C24, 82C31, 82C41), 35J20, 35K55, 35R35

2 T. Funaki
Contents
1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.1 Background . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41.2 Quick overview of the results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61.3 Derivation of effective interface models from Ising model . . . . . . . . . 81.4 Basic notation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2 ∇ϕ interface model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.1 Height variables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112.2 Hamiltonian . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112.3 Equilibrium states (Gibbs measures) . . . . . . . . . . . . . . . . . . . . . . . . . . . 132.4 Dynamics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 172.5 Scaling limits . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 182.6 Quadratic potentials . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
3 Gaussian equilibrium systems . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
3.1 Gaussian systems in a finite region . . . . . . . . . . . . . . . . . . . . . . . . . . . . 203.2 Gaussian systems on Z
d . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 233.3 Massive Gaussian systems . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 283.4 Macroscopic scaling limits . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
4 Random walk representation and fundamental inequalities 37
4.1 Helffer-Sjostrand representation and FKG inequality . . . . . . . . . . . . . 374.2 Brascamp-Lieb inequality . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 414.3 Estimates of Nash-Aronson’s type and long correlation . . . . . . . . . . . 434.4 Thermodynamic limit and construction of ∇ϕ-Gibbs measures . . . . 464.5 Construction of ϕ-Gibbs measures . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
5 Surface tension . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
5.1 Definition of surface tension . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 485.2 Quadratic potentials . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 505.3 Fundamental properties of surface tension . . . . . . . . . . . . . . . . . . . . . . 515.4 Proof of Theorems 5.3and 5.5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 525.5 Surface tension in one dimensional systems . . . . . . . . . . . . . . . . . . . . . 56
6 Large deviation and concentration properties . . . . . . . . . . . . . 59
6.1 LDP with weak self potentials . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 606.2 Concentration properties . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 646.3 LDP with weak self potentials in one dimension . . . . . . . . . . . . . . . . . 676.4 LDP for δ-pinning in one dimension . . . . . . . . . . . . . . . . . . . . . . . . . . . 756.5 Outline of the proof of Theorem 6.1 . . . . . . . . . . . . . . . . . . . . . . . . . . . 776.6 Critical LDP. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
7 Entropic repulsion, pinning and wetting transition . . . . . . . . 80

Stochastic Interface Models 3
7.1 Entropic repulsion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 807.2 Pinning . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 857.3 Wetting transition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
8 Central limit theorem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
9 Characterization of ∇ϕ-Gibbs measures . . . . . . . . . . . . . . . . . . . 95
9.1 ϕ-dynamics on Zd and ∇ϕ-dynamics on (Zd)∗ . . . . . . . . . . . . . . . . . . 95
9.2 Stationary measures and ∇ϕ-Gibbs measures . . . . . . . . . . . . . . . . . . . 969.3 Proof of Theorem 9.3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 989.4 Proof of Proposition 9.4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1029.5 Uniqueness of ϕ-Gibbs measures . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104
10 Hydrodynamic limit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 105
10.1 Space-time diffusive scaling limit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10510.2 The nonlinear PDE (10.4) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10910.3 Local equilibrium. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11210.4 Proof of Theorem 10.1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11810.5 Surface diffusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 120
11 Equilibrium fluctuation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 124
12 Dynamic large deviation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125
12.1 Dynamic LDP . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12512.2 Dynamic rate functional . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12512.3 Relation to the static LDP . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 126
13 Hydrodynamic limit on a wall . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 128
13.1 Dynamics on a wall . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12813.2 Hydrodynamic limit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 129
14 Equilibrium fluctuation on a wall . . . . . . . . . . . . . . . . . . . . . . . . . 130
14.1 The case attached to the wall . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13014.2 The case away from the wall . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131
15 Dynamic entropic repulsion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132
16 Hydrodynamic limit in two media . . . . . . . . . . . . . . . . . . . . . . . . . 132
17 Pinning dynamics on a wall . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 133
18 Other dynamic models . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 138
18.1 Stochastic lattice gas with two types of particles and freeboundary problems . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 138
18.2 Interacting Brownian particles at zero temperature . . . . . . . . . . . . . . 13918.3 Singular limits for stochastic reaction-diffusion equations . . . . . . . . . 143
References . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 154

4 T. Funaki
1 Introduction
1.1 Background
The water changes its state to ice or vapor together with variations in tem-perature. Each of these three states (liquid/solid/gas) is macroscopically ho-mogeneous and called a phase (or a pure phase) in physics. The water and theice can coexist at temperature 0
C. In fact, under various physical situationsespecially at low temperature, more than one distinct pure phases coexist inspace and different phases are separated by fairly sharp hypersurfaces calledinterfaces. Snow crystals in the vapor or alloys consisting of two types ofmetals are typical examples. Crystals are macroscopic objects, which haveordered arrangements of atoms or molecules in microscopic scale.
Wulff [293] in 1901 proposed a variational principle, at thermodynamiclevel or from the phenomenological point of view, for determining the shapeof interfaces for crystals. Let E ⊂ R
d be a crystal shape. Its boundary ∂E isthen an interface and an energy called total surface tension is associatedwith each interface by
W(E) =
∫
∂E
σ(n(x)) dx, (1.1)
where σ = σ(n) ≥ 0 is the surface tension of flat hyperplane in Rd with unit
normal vector n ∈ Sd−1 and dx represents the volume element on ∂E. Theinterface has locally an energy σ(n(x)) depending on its tilt n = n(x) and,integrating it over the surface ∂E, the Wulff functional W(E) is defined. Foran alloy consisting of two types of metals A and B, E is the region occupiedby A-type’s metal so that its volume is always kept invariant if the amountof each metal is fixed.
It is expected that the interface, which is in equilibrium and stable, mini-mizes its total energy and this naturally leads us to the variational problem:
minvol (E)=v
W(E) (1.2)
under the condition that the total volume of the crystal E (e.g., the regionoccupied by A-type’s metal) is fixed to be v > 0 . The minimizer E of (1.2) iscalled Wulff shape. Especially when the surface tension σ is independent ofthe direction n, W(E) coincides with the surface area of ∂E (except constantmultipliers) and (1.2) is equivalent to the well-known isoperimetric problem.It is one of quite general and fundamental principles in physics that physicallyrealizable phenomena might be characterized by variational principles. Wulff’svariational problem is one of the typical examples.
Crystals are, as we have already pointed out, macroscopic objects. It is aprincipal goal of statistical mechanics to understand such macroscopic phe-nomena in nature from microscopic level of atoms or molecules. Dobrushin,Kotecky and Shlosman [93] studied the Wulff’s problem from microscopic

Stochastic Interface Models 5
point of view for the first time. They have employed the ferromagnetic Isingmodel as a microscopic model and established, at sufficiently low tempera-tures, the large deviation principle for the sequence of corresponding Gibbsmeasures on finite domains when the volumes of these domains diverge toinfinity. It was shown that the large deviation rate functional is exactly theWulff functional W(E) with the surface tension σ(n) determined thermody-namically from the underlying Gibbs measures. As a consequence, under thecanonical Gibbs measures obtained by conditioning the macroscopic volumeoccupied by + spins to be constant, a law of large numbers is proved andthe Wulff shape is obtained in the limit. The results of Dobrushin et al. wereafterward generalized by Ioffe and Schonmann [187], Bodineau [27], Cerf andPisztora [59] and others; see a review paper [29].
Once an equilibrium situation is understood to some extent, the next targetis obviously the analysis of the corresponding dynamics. The situation thattwo distinct pure phases coexist and are separated by a sharp interface willpersist under the time evolution and the interface will relax slowly. The goalis to investigate the motion of interface on a properly chosen coarse space-time scale. The time evolution corresponding to the Ising model is a reversiblespin-flip dynamics, the so-called Glauber or Kawasaki dynamics which maybe the prime examples. Spin at each site randomly flips and changes its signunder the dynamics without or with conservation law. At sufficiently lowtemperatures, the interactions between spins on two neighboring sites becomestrong enough to incline them to have the common signs with high probabilityand most changes occur near the interface. The shape of interface is howeverrather complicated; for instance, it has overhangs or bubbles.
A class of effective interface models is introduced by avoiding such compli-cations and directly modeling the interface degree of freedom at microscopiclevel; see Sect. 1.3. These models are, at one side, compromises between thedescription of physical phenomena and mathematical requirements but, onthe other side, explain the phenomena in satisfactory good way. The aim ofthese notes is to try to give an overview of results mostly on the ∇ϕ interfacemodel, which is one of such effective interface models.
As we have observed, in statistical mechanics, there are at least two dif-ferent scales: macroscopic and microscopic ones. The procedures connectingmicroscopic models with the macroscopic phenomena are realized by takingthe scaling limits. The scaling parameter N ∈ Z+ represents the ratio of themacroscopically typical length (e.g., 1 cm) to the microscopic one (e.g., 1 nm)and it is finite, but turns out to be quite large (N = 107 in this example).The physical phenomena can be mathematically understood only by takingthe limit N → ∞. The dynamics involve the scalings also in time. Within amacroscopic unit length of time, the molecules collide with each other withtremendous frequency. Since the microscopic models such as the Ising modeland ∇ϕ interface model involve randomness, the limit procedure N → ∞can be formulated in the framework of classical limit theorems in probabilitytheory.

6 T. Funaki
The principal ideas behind these limit theorems are that, by the ergodicor mixing properties of the microscopic systems, the microscopic (physical)quantities are locally in macroscopic scale averaged or homogenized under thescaling limits. The macroscopic observables are obtained under such averagingeffects. However, the ∇ϕ interface model which we shall discuss in the presentnotes has only an extremely weak mixing property and this sometimes makesthe analysis of the model difficult. For instance, the thermodynamic quantitymay diverge under the usual scaling. This suggests the necessity of introducingscalings different from the usual one to obtain a nontrivial limit.
1.2 Quick overview of the results
In Sect. 2, the ∇ϕ interface model is precisely introduced. The basic micro-scopic objects are height variables φ of interfaces. Assigning an energy H(φ)to each height variable, its statistical ensemble in equilibrium is defined by theGibbs measures. Then, the corresponding time evolution called the Ginzburg-Landau ∇ϕ interface model is constructed in such a way that it is reversibleunder the Gibbs measures, in other words, the detailed balance is fulfilled. Thescaling limits connecting microscopic and macroscopic levels will be explained.
The ∇ϕ interface model with quadratic potentials is discussed in Sect.3 as a warming up before studying general convex potentials. In Sect. 4,fundamental tools like Helffer-Sjostrand (random walk) representation, FKGinequality and Brascamp-Lieb inequality are presented.
A basic role in various limit theorems is played by the so-called surfacetension σ(u), u ∈ R
d. The function σ is a macroscopic or thermodynamicfunction and will be introduced in Sect. 5. The limit theorems under thescalings can be formulated in the terminology of probability theory as follows:
Law of large numbers (LLN): Macroscopic quantity obtained under thescaling limit from randomly fluctuating microscopic objects, i.e., heightvariables of interfaces in our model, becomes deterministic due to certainaveraging effects.
Central limit theorem (CLT): Fluctuations around the deterministiclimit are studied.
Large deviation principle (LDP): LDPs for macroscopically scaledheight variables are sometimes useful to show the LLNs.
From the physical point of view, these limit theorems are classified into twotypes: static results on the equilibrium Gibbs measures and dynamic results:
(1) Static results, Sects. 6-9.
LDP, LLN and derivation of variational principles (VP), Sect. 6:LDP was studied for Gaussian case by Ben Arous and Deuschel [17] andfor general Gibbsian case by Deuschel, Giacomin and Ioffe [85]. For heightvariables conditioned to be positive and to have definite total volume, theshape of most probable droplet called the Wulff shape is determined as

Stochastic Interface Models 7
a minimizer of the total surface tension as a consequence of LDP. Addingan effect of weak self potentials to the system, Funaki and Sakagawa [156]derived the VPs of Alt and Caffarelli [10] or Alt, Caffarelli and Fried-man [11]. Bolthausen and Ioffe [37] discussed under additional pinningeffect at a wall for 2 + 1 dimensional system and obtained the Winter-bottom shape in the limit.
Entropic repulsion (wall effect), Sect. 7.1: The entropic repulsion isthe problem to study, when a hard wall is settled at the height level0, how high the interfaces are pushed up by the randomness (i.e., theentropic effect) naturally existing in the Gibbs measures. The problem wasposed by Lebowitz and Maes [216] and then investigated by Bolthausen,Deuschel and Zeitouni [35], Deuschel [82], Deuschel and Giacomin [83] forGaussian case and by Deuschel and Giacomin [84] for general Gibbsiancase.
Pinning and wetting transition, Sects. 7.2, 7.3: The pinning is the prob-lem to study, under the effect of weak force attracting interfaces to theheight level 0, whether the field is really localized or not. The problemwas discussed by Dunlop, Magnen, Rivasseau and Roche [102], Deuscheland Velenik [88], Ioffe and Velenik [188] and Bolthausen and Velenik [38].The two effects of entropic repulsion and pinning conflict with each other,and a natural question to be addressed is which effect is dominant inthe system. In one and two dimensions, a phase transition called wettingtransition occurs. This fact was first observed by Fisher [118] in one di-mension, followed by Bolthausen, Deuschel and Zeitouni [36] and Caputoand Velenik [55].
CLT, Sect. 8: Naddaf and Spencer [237] investigated CLT for Gibbs mea-sures. The result is non-trivial since the Gibbs measures have long corre-lations.
Characterization of ∇ϕ-Gibbs measures, Definition 2.2, Sect. 9: Thefamily of all (tempered and shift invariant) ∇ϕ-Gibbs measures is charac-terized based on the coupling argument for the corresponding dynamics.This result plays a key role in the proof of the hydrodynamic limit.
(2) Dynamic results I, Sects. 10-12.
Hydrodynamic limit (LLN) and derivation of motion by mean cur-vature with anisotropy, Sect. 10: LLN is shown under the time evolu-tion. This procedure is called the hydrodynamic limit and established byFunaki and Spohn [157]. Motion by mean curvature (MMC) except forsome anisotropy is derived in the limit. The diffusion matrix of the limitequation is formally given by Hessian of the surface tension.
Equilibrium fluctuation (CLT), Sect. 11: Dynamic CLT in equilibriumis studied and an infinite dimensional Ornstein-Uhlenbeck process is de-rived in the limit by Giacomin, Olla and Spohn [169]. The identificationof covariance matrix with Hessian of the surface tension, however, stillremains open.

8 T. Funaki
LDP, Sect. 12: Dynamic LDP was discussed by Funaki and Nishikawa [154].
(3) Dynamic results II, Sects. 13-17.
The dynamics under the effects of wall or additional weak self potentialsare studied.
Hydrodynamic limit on a wall, Sect. 13: The limit is MMC with reflec-tion and described by an evolutionary variational inequality.
Equilibrium fluctuation (CLT) on a wall, Sect. 14: Stochastic PDEwith reflection is obtained under the scaling limit.
Dynamic entropic repulsion, Sect. 15:Hydrodynamic limit in two media, Sect. 16: The hydrodynamic limit
for dynamics associated with the Hamiltonian added a weak self potentialis discussed.
Pinning dynamics on a wall, Sect. 17: Dynamics under the effects ofboth pinning and repulsion are constructed.
(4) Other dynamic models for interfaces, Sect. 18.
Stochastic lattice gas with two types of particles and free boundaryproblems
Interacting Brownian particles at zero temperatureSingular limits for stochastic reaction-diffusion equations
1.3 Derivation of effective interface models from Ising model
Let us briefly and rather formally explain how one can derive the effectiveinterface models from the ferromagnetic Ising model at sufficiently low tem-perature. In the Ising model, the energy is associated to each ± spin configu-ration s = s(x);x ∈ Λ` ∈ +1,−1Λ` on a large box Λ` := [−`, `]d ∩ Z
d asthe sum over all bonds in Λ`
H(s) = −∑
〈x,y〉⊂Λ`
s(x)s(y).
The sum is usually defined under certain boundary conditions. We shall con-sider, for simplicity, only when d = 2. The function H(s) can be rewrittenas
H(s) = 2|γ| (+ constant)
in terms of the set of contours γ = γ(s) on the dual lattice corresponding tos, which separate two regions consisting of sites occupied by + and − spins,respectively, where |γ| denotes the number of bonds in γ (the total length ofγ) and an additional constant in H(s) is independent of the configurations s.Under the Gibbs measure
µ`(s) =1
Z`e−βH(s), s ∈ +1,−1Λ`,

Stochastic Interface Models 9
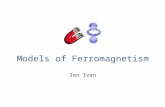
if the temperature T (β = 1/kT ) is sufficiently low, the configurations of spinswhich have the same values on neighboring sites overwhelm the probability,since such configurations have smaller energies. In other words, when there is asingle large contour γ, the probability that the configurations in Fig. 2 havingbubbles arise is very little and almost negligible. We can therefore disregard
Fig. 1. Possible configurations. Fig. 2. Neglected configurations.
(with high probability) the configurations with bubbles and assume that theconfigurations like in Fig. 1 can only appear. Such spin configurations s areequivalently represented by the height variables φ = φ(x) ∈ [−`, `] ∩ Z;x ∈[−`, `]d−1∩Z
d−1 which measure the distances of γ from the x-axis, one fixedhyperplane. Then, the energy H(s) has another form
H(φ) = 2∑
〈x,y〉⊂[−`,`]d−1∩Zd−1
|φ(x) − φ(y)| (1.3)
up to an additional constant; notice that the number of horizontal bonds inγ is always fixed. The model for random interfaces φ : [−`, `]d−1 ∩ Z
d−1 → Z
with the energy (1.3) is called the SOS (Solid on Solid) model. One canfurther replace the space Z for values of height variables with continuum R
and |φ(x)−φ(y)| with V (φ(x)−φ(y)), and this leads us to the ∇ϕ interfacemodel. As a generalization of the function V (η) = |η|, it is natural to supposethat the potential function V is convex and even so that the energy is smallwhen the differences of heights φ : [−`, `]d−1 ∩Z
d−1 → R on neighboring sitesare small, in other words, when the interfaces are more flat.
1.4 Basic notation
• For Λ ⊂ Zd (d dimensional square lattice),
∂+Λ = x /∈ Λ; |x− y| = 1 for some y ∈ Λ

10 T. Funaki
is the outer boundary of Λ and Λ = Λ∪∂+Λ is the closure of Λ, respectively,where x /∈ Λ means x ∈ Λc = Z
d \ Λ.• Λ b Z
d means that Λ is a finite subset of Zd: |Λ|(= ]Λ) <∞.
• O ∈ Zd stands for the origin and, for ` ∈ N, Λ` = [−`, `]d ∩Z
d denotes thelattice cube with center O and side length 2`+ 1.
• |x| = max1≤i≤d
|xi| for x = (xi)di=1 ∈ Z
d and |u| =
√
∑di=1 u
2i for u = (ui)
di=1 ∈
Rd (There will be some exceptional usages in Sect. 3).
• For a bounded domain D in Rd, we denote DN = ND ∩ Z
d, whereND = Nθ; θ ∈ D ⊂ R
d and N ∈ Z+ stands for the scaling parame-ter. The set DN is a microscopic correspondence, which is discretized, tothe macroscopic domain D.
• The set Td = (R/Z)d ≡ (0, 1]d denotes a d dimensional unit torus (identi-
fying 0 with 1) and TdN = (Z/NZ)d ≡ 1, 2, . . . , Nd is the corresponding
microscopic lattice torus (identifying 0 with N).• For a topological space S, P(S) stands for the family of all Borel proba-
bility measures on S.

Stochastic Interface Models 11
2 ∇ϕ interface model
The ∇ϕ interface model has a rather simplified feature, when it is comparedwith the Ising model, for example. It is, however, equipped with a sufficientlywide variety of nontrivial aspects and serves as a useful model to explainphysical behavior of interfaces from microscopic point of view. In this sectionwe introduce the model.
2.1 Height variables
We are concerned with a hypersurface (interface) embedded in d + 1 dimen-sional space R
d+1, which separates two distinct pure phases. Notice that, inSect. 1.3, we discussed in d dimensional space; however, here and after d isreplaced with d+1. To avoid complications, we assume that the interface hasno overhangs nor bubbles and accordingly that it is represented as a graphviewed from a certain d dimensional fixed reference hyperplane Γ located inthe space R
d+1. In other words, the location of the interface is described by theheight variables φ = φ(x) ∈ R, x ∈ Γ, which measure the vertical distancesbetween the interface and Γ . The variables φ are microscopic objects, and thespace Γ is discretized and taken as Γ = Λ(b Z
d), in particular, Γ = DN witha (macroscopic) bounded domain D in R
d or lattice torus TdN or Z
d. Here Nrepresents the size of the microscopic system, and our main interest will bein analyzing the asymptotic behavior of the system under the scaling limitN → ∞.
2.2 Hamiltonian
An energy is associated with each height variable φ : Γ → R by assigningpenalty according to its tilts. Namely, we define the Hamiltonian H(φ) asthe sum over all bonds (i.e., pairs of nearest neighbor sites) 〈x, y〉 in Γ whenΓ = T
dN or Z
d, and in Γ when Γ = DN or Γ = Λ b Zd in general
H(φ) ≡ HψΓ (φ) =
∑
〈x,y〉⊂Γ (or Γ )
V (φ(x) − φ(y)). (2.1)
Note that the boundary conditions ψ = ψ(x);x ∈ ∂+Γ are required todefine the sum (2.1) for Γ = DN , i.e., we assume
φ(x) = ψ(x), x ∈ ∂+Γ,
in the sum. When Γ = Zd, (2.1) is a formal infinite sum. The (interaction) po-
tential V is smooth, symmetric and strictly convex. More precisely, through-out the present notes we require the following three conditions on the potentialV = V (η):

12 T. Funaki
(V1) (smoothness) V ∈ C2(R),
(V2) (symmetry) V (−η) = V (η), η ∈ R, (2.2)
(V3) (strict convexity) c− ≤ V ′′(η) ≤ c+, η ∈ R, for some c−, c+ > 0.
The surface φ has low energy if the tilts |φ(x) − φ(y)| are small. The energy(2.1) of the interface φ is constructed in such a manner that it is invariantunder a uniform translation φ(x) → φ(x) + a for all x ∈ Z
d (or x ∈ Γ ) anda ∈ R. A typical example of V satisfying the conditions (2.2) is a quadraticpotential V (η) = c
2η2, c > 0.
For every Λ ⊂ Zd, Λ∗ denotes the set of all directed bonds b = 〈x, y〉 in Λ,
which are directed from y to x. We write xb = x, yb = y for b = 〈x, y〉. For
each b ∈ (Zd)∗ and φ = φ(x);x ∈ Zd ∈ R
Zd
, define
∇φ(b) = φ(xb) − φ(yb).
We also define ∇iφ(x) = φ(x + ei) − φ(x), 1 ≤ i ≤ d for x ∈ Zd
where ei ∈ Zd is the i-th unit vector given by (ei)j = δij . The variables
∇φ(x) = ∇iφ(x)1≤i≤d ∈ Rd represent vector field of height differences
or sometimes called tilt (or gradients) of φ. The Hamiltonian H(φ) is thenrewritten as
H(φ) =1
2
∑
b∈Γ∗(or Γ∗)
V (∇φ(b)). (2.3)
The factor 1/2 is needed because each undirected bond b = 〈x, y〉 is countedtwice in the sum. Since the energy is determined from the height differences∇φ, the model is called the ∇ϕ interface model.
Remark 2.1 (1) The sum (2.1) is meaningful only when the potential V issymmetric, while the expression (2.3) makes sense for asymmetric V . How-ever, note that the sum (2.3) is essentially invariant (except for the boundarycontributions) if V is replaced with its symmetrization 1
2V (η) + V (−η).(2) The potential V can be generalized to the bond-dependent case: Vb =Vb(η); b ∈ (Zd)∗ so that the corresponding Hamiltonian is defined by (2.3)with V replaced by Vb; see Example 5.3, Problem 10.1 below and [265]. Thisformulation truly covers the asymmetric potentials.
Remark 2.2 (1) In the quantum field theory, H is called massless Hamil-tonian and well studied in ’80s. Massive Hamiltonian is given by Hm(φ) =H(φ) + 1
2m2∑
x φ2(x),m > 0. The Hamiltonian with weak self potentials or
pinning potentials will be introduced in Sect. 6.1 or in Sect. 6.4 (see also Sect.7.2), respectively.(2) In our model height variables φ(x) themselves are not discretized. SOS(solid on solid) model is a model obtained discretizing the height variables si-multaneously: φ(x) ∈ Z+ and with V (η) = |η|.(3) (∆ϕ interface model) In the ∇ϕ interface model, the energy H(φ) isroughly the surface area of the microscopic interface φ. In fact, this is true for

Stochastic Interface Models 13
V (η) =√
1 + η2. However, if we are concerned for example with the mem-brane as the object of our study, its surface area is preserved and alwaysconstant. Therefore the energy should be determined by taking into accountthe next order term like
∑
x(∆φ(x))2, which may be regarded as the curvatureof φ, see [181].
2.3 Equilibrium states (Gibbs measures)
Once the Hamiltonian H is specified, in the formulation of statistical me-chanics, equilibrium states called Gibbs measures can be naturally associatedtaking the effect of random fluctuations into account.
ϕ-Gibbs measures
For a finite region Λ b Zd, the Gibbs measure (more exactly, ϕ-Gibbs
measure, finite volume Gibbs measure or local specification) for the field ofheight variables φ ∈ R
Λ over Λ is defined by
µ(dφ) ≡ µψΛ(dφ) =1
ZψΛexp
−HψΛ (φ)
dφΛ, (2.4)
with the boundary conditions ψ ∈ R∂+Λ. The term e−H
ψΛ (φ) is the Boltzmann
factor, while
dφΛ =∏
x∈Λdφ(x)
is the Lebesgue measure on RΛ which represents uniform fluctuations of the
interface. The constant ZψΛ is for normalization defined by
ZψΛ =
∫
RΛ
exp
−HψΛ (φ)
dφΛ. (2.5)
Note that the conditions (2.2) imply ZψΛ <∞ for every Λ b Zd and therefore
µψΛ ∈ P(RΛ).The reason for introducing these measures is based on a physical argument.
The uniform measure dφΛ arises from the postulate in equilibrium statisti-cal mechanics called principle of equal a priori probabilities, while theBoltzmann factor naturally appears from the Gibbs’ principle which is some-times called equivalence of ensembles: a subsystem in a very large closedsystem distributed under the microcanonical ensemble (= equal probabilitieson a system with conservation law) is described by the Gibbs measure, [260],[162], [80].
We shall often regard µψΛ ∈ P(RΛ) by considering φ(x) = ψ(x) for x ∈∂+Λ under µψΛ. The boundary condition ψ is sometimes taken from R
Λc , and
we regard µψΛ ∈ P(RZd
) in such case. When Γ = TdN , the Gibbs measure

14 T. Funaki
is unnormalizable, since HψΛ (φ) is translation invariant and this makes the
normalization ZTdN= ∞.
For an infinite region Λ : |Λ| = ∞, the expression (2.4) has no meaningsince the Hamiltonian HΛ(φ) is a formal sum. Nevertheless, one can define thenotion of Gibbs measures on Z
d based on the well-known DLR formulations:
Definition 2.1 The probability measure µ ∈ P(RZd
) is called a Gibbs mea-sure for ϕ-field (ϕ-Gibbs measure for short), if its conditional probabilityon FΛc = σφ(x);x /∈ Λ satisfies the DLR equation
µ( · |FΛc)(ψ) = µψΛ( · ), µ-a.e.ψ,
for every Λ b Zd.
It is known that the ϕ-Gibbs measures exist when the dimension d ≥ 3,but not for d = 1, 2. An infinite volume limit (thermodynamic limit) for µ0
Λ
as Λ Zd exists only when d ≥ 3 (cf. Sect. 4.5).
∇ϕ-Gibbs measures
The height variables φ = φ(x);x ∈ Zd on Z
d automatically determines afield of height differences ∇φ = ∇φ(b); b ∈ (Zd)∗. One can therefore considerthe distribution µ∇ of ∇ϕ-field under the ϕ-Gibbs measure µ. We shall callµ∇ the ∇ϕ-Gibbs measure. In fact, it is possible to define the ∇ϕ-Gibbsmeasures directly by means of the DLR equations and, in this sense, ∇ϕ-Gibbsmeasures exist for all dimensions d ≥ 1 (cf. Sect. 4.4).
In order to describe the DLR equation for ∇ϕ-Gibbs measures, we firstclarify the structure of the state space for the ∇ϕ-field. It is obvious that the
height variable φ ∈ RZd
determines ∇φ ∈ R(Zd)∗ ; however, all η = η(b) ∈
R(Zd)∗ can not be the ∇ϕ-field, i.e., it may not be possible to find φ such that
η = ∇φ in general. Indeed, ∇φ always satisfies the loop condition: every sumof ∇φ along a closed loop must vanish. To state more precisely, we introducesome notion.
A sequence of bonds C = b(1), b(2), . . . , b(n) is called a chain connectingy and x (y, x ∈ Z
d) if yb(1) = y, xb(i) = yb(i+1) for 1 ≤ i ≤ n− 1 and xb(n) = x.The chain C is called a closed loop if xb(n) = yb(1) . A plaquette is a closedloop P = b(1), b(2), b(3), b(4) such that xb(i) , i = 1, .., 4 consists of four
different points. The field η = η(b) ∈ R(Zd)∗ is said to satisfy the plaquette
condition if
(P1) η(b) = −η(−b) for all b ∈ (Zd)∗,
(P2)∑
b∈P
η(b) = 0 for all plaquettes P in Zd,
where −b denotes the reversed bond of b. Note that, if φ = φ(x) ∈ RZd
,
then ∇φ = ∇φ(b) ∈ R(Zd)∗ automatically satisfies the plaquette condition.
The plaquette condition is equivalent to the loop condition:

Stochastic Interface Models 15
(L)∑
b∈C
η(b) = 0 for all closed loops C in Zd.
Notice that the condition (P1) follows from (L) by taking the closed loopC = b,−b. We set
X = η ∈ R(Zd)∗ | η satisfies the loop condition,
then X is the state space for the ∇ϕ-field. In fact, the height differences
ηφ ∈ X are associated with the heights φ ∈ RZd
by
ηφ(b) := ∇φ(b), b ∈ (Zd)∗, (2.6)
and, conversely, the heights φη,φ(O) ∈ RZd
can be constructed from heightdifferences η and the height variable φ(O) at x = O as
φη,φ(O)(x) :=∑
b∈CO,x
η(b) + φ(O), (2.7)
where CO,x is an arbitrary chain connecting O and x. Note that φη,φ(O) iswell-defined if η = η(b) ∈ X .
We next define the finite volume ∇ϕ-Gibbs measures. For every ξ ∈ Xand Λ b Z
d the space of all possible configurations of height differences onΛ∗ := b = 〈x, y〉 ∈ (Zd)∗|x or y ∈ Λ for given boundary condition ξ isdefined as
XΛ∗,ξ = η = (η(b))b∈Λ∗ | η ∨ ξ ∈ X,
where η ∨ ξ ∈ X is determined by (η ∨ ξ)(b) = η(b) for b ∈ Λ∗ and = ξ(b) forb /∈ Λ∗. The finite volume ∇ϕ-Gibbs measure in Λ (or, more precisely, in Λ∗)with boundary condition ξ is defined by
µ∇Λ,ξ(dη) = Z−1
Λ,ξ exp
−1
2
∑
b∈Λ∗
V (η(b))
dηΛ,ξ ∈ P(XΛ∗,ξ),
where dηΛ,ξ denotes a uniform measure on the affine space XΛ∗,ξ and ZΛ,ξis the normalization. We shall sometimes regard µ∇
Λ,ξ ∈ P(X ) by considering
η(b) = ξ(b) for b /∈ Λ∗ under µ∇Λ,ξ as before. Note that the dimension of the
space XΛ∗,ξ is |Λ| at least if Zd \Λ is connected, since one can associate η with
φ = φΛ by
φ(x) =∑
b∈Cx0,x
(η ∨ ξ)(b), x ∈ Λ, (2.8)
where x0 /∈ Λ is fixed and Cx0,x is a chain connecting x0 and x.The finite volume ϕ-Gibbs measures and the finite volume ∇ϕ-Gibbs mea-
sures are associated with each other as we have pointed out above. Namely,
given ξ ∈ X and h ∈ R, define ψ ∈ RZd
as ψ = φξ,h by (2.7). Then, if φ is

16 T. Funaki
µψΛ-distributed with the boundary condition ψ constructed in this way, ∇φ is
µψΛ,ξ-distributed. The distribution of ∇φ is certainly independent of the choiceof h.
Now, similarly to the definition of the ϕ-Gibbs measures on Zd, one can
introduce the ∇ϕ-Gibbs measures on (Zd)∗.
Definition 2.2 The probability measure µ∇ ∈ P(X ) is called a Gibbs measurefor the height differences (∇ϕ-Gibbs measure for short), if it satisfies theDLR equation
µ∇( · |F(Zd)∗\Λ∗)(ξ) = µ∇Λ,ξ( · ), µ∇-a.e. ξ,
for every Λ b Zd, where F(Zd)∗\Λ∗ is the σ-algebra generated by η(b)|b ∈
(Zd)∗ \ Λ∗.
Markov property
In the Hamiltonian H(φ), the interactions among the height variables areonly counted through the neighboring sites. This structure is reflected as theMarkov property of the field of height variables φ = φ(x) under the
(finite or infinite volume) ϕ-Gibbs measures µψΛ and µ:
Proposition 2.1 (1) Let Λ b Zd and the boundary condition ψ ∈ R
∂+Λ
be given. Suppose that Λ is decomposed into three regions A1, A2, B and Bseparates A1 and A2; namely, Λ = A1∪A2∪B, A1∩A2 = A1∩B = A2∩B =∅ and |x1 − x2| > 1 holds for every x1 ∈ A1 and x2 ∈ A2. Then, under
the conditional probability µψΛ ( · |FB), the random variables φA1 and φA2 aremutually independent, where we denote φA1 = φ(x);x ∈ A1 etc.
(2) Let µ ∈ P(RZd
) be a ϕ-Gibbs measure. Then, for every A b Zd, the
random variables φA and φAc are mutually independent under the conditionalprobability µ ( · |F∂+A).
In particular, in one dimension, φ = φ(x) is a pinned random walk
under µψΛ regarding x as time variables. Let η(y); y = 1, 2, . . . be an R-valuedi.i.d. defined on a certain probability space (Ω,P ) having distribution p(a)da,where
p(a) =1
ze−V (a), a ∈ R
and z =∫
Re−V (a) da is the normalization. Then, we have the following.
Proposition 2.2 Let Λ = 1, 2, . . . , N−1 ⊂ Z1 and assume that the bound-
ary conditions are given by ψ(0) = h0, ψ(N) = h1. Define the height variablesφ = φ(x);x ∈ Λ, Λ = 0, 1, 2, . . . , N by
φ(x) = h0 +x∑
y=1
η(y), x ∈ Λ,

Stochastic Interface Models 17
and consider them under the conditional probability P ( · |φ(N) = h1). Then,
φΛ = φ(x);x ∈ Λ is µψΛ-distributed.
2.4 Dynamics
Corresponding to the Hamiltonian H(φ), one can naturally introduce a ran-dom time evolution of microscopic height variables φ of the interface. Indeed,we consider the stochastic differential equations (SDEs) for φt = φt(x);x ∈Γ ∈ R
Γ , t > 0
dφt(x) = − ∂H
∂φ(x)(φt)dt+
√2dwt(x), x ∈ Γ, (2.9)
where wt = wt(x);x ∈ Γ is a family of independent one dimensional stan-dard Brownian motions. The derivative of H(φ) in the variable φ(x) is givenby
∂H
∂φ(x)(φ) =
∑
y∈Γ (orΓ ):|x−y|=1
V ′(φ(x) − φ(y)), (2.10)
for x ∈ Γ . When Γ b Zd, the SDEs (2.9) have the form
dφt(x) = −∑
y∈Γ :|x−y|=1
V ′(φt(x) − φt(y))dt+√
2dwt(x), x ∈ Γ, (2.11)
subject to the boundary conditions
φt(y) = ψ(y), y ∈ ∂+Γ. (2.12)
When Γ = Zd, although the Hamiltonian H is a formal sum, its derivative
(2.10) has an affirmative meaning and we can write down the SDEs for φt =
φt(x);x ∈ Zd ∈ R
Zd
, t > 0
dφt(x) = −∑
y∈Zd:|x−y|=1
V ′(φt(x) − φt(y))dt+√
2dwt(x), x ∈ Zd. (2.13)
The SDEs (2.11) with (2.12) or the SDEs (2.13) have unique solutions, sincethe coefficient V ′ in the drift term is Lipschitz continuous by our assumptions(2.2). For (2.13), since it is an infinite system, one need to introduce a properfunction space for solutions, cf. Lemmas 9.1 and 9.2. The evolution of φt isdesigned in such a manner that it is stationary and, moreover, reversible underthe Gibbs measures µψΛ or µ, cf. Proposition 9.4. In physical terminology, theequation fulfills the detailed balance condition. Such evolution or the SDEsare called Ginzburg-Landau dynamics, distorted Brownian motion or theLangevin equation associated with H(φ).
The drift term in the SDEs (2.9) determines the gradient flow along whichthe energy H(φ) decreases. In fact, since the function V is symmetric and

18 T. Funaki
convex, φt(x) > φt(y) implies that −V ′(φt(x) − φt(y)) < 0 so that the driftterm of (2.11) or (2.13) is negative and therefore φt(x) decreases. Converselyif φt(x) < φt(y), the drift is positive and φt(x) increases. Therefore, in bothcases, the drift has an effect to make the interface φ flat. The term
√2wt(x)
gives a random fluctuation which competes against the drift.The Dirichlet form corresponding to the SDEs (2.13) is
E(F,G) ≡ −Eµ[FLG] =∑
x∈Zd
Eµ[∂F (x, φ)∂G(x, φ)], (2.14)
for F = F (φ), G = G(φ), where Eµ[ · ] denotes the expectation under theGibbs measure µ, L is the generator of the process φt and ∂F (x, φ) :=∂F/∂φ(x). Indeed, at least when Γ b Z
d, the generator L of the processφt ∈ R
Γ determined by the SDEs (2.9) is the differential operator of secondorder
L =∑
x∈Γ
(
∂
∂φ(x)
)2
−∑
x∈Γ
∂H
∂φ(x)
∂
∂φ(x)(2.15)
and, by integration by parts formula, we have∫
RΓ
FLG · e−HdφΓ =
∫
RΓ
F∑
x∈Γ
∂
∂φ(x)
∂G
∂φ(x)e−H
dφΓ
= −∑
x∈Γ
∫
RΓ
∂F
∂φ(x)
∂G
∂φ(x)· e−HdφΓ ,
for every F = F (φ), G = G(φ) ∈ C2b (R
Γ ). The Hamiltonians H may be moregeneral than (2.1), for instance, those with self potentials, see (6.3)
Remark 2.3 (1) The dynamics corresponding to the massive HamiltonianHm (recall Remark 2.2) can be introduced similarly. They force the heightsφ = φ(x) to stay bounded.(2) Interface dynamics of SOS type were studied by several authors, e.g., Dun-lop [99] considered the dynamics for the corresponding gradient fields in onedimension; see also Remark 13.1.
2.5 Scaling limits
Our main interest is in analysis of the scaling limit, which passes frommicroscopic to macroscopic levels. For the microscopic height variables φ =φ(x);x ∈ Γ with Γ = DN ,T
dN or Z
d, the macroscopic height variableshN = hN(θ) are associated by
hN (θ) =1
Nφ ([Nθ]) , θ ∈ D,Td or R
d, (2.16)
where [Nθ] stands for the integral part of Nθ(∈ Rd) taken componentwise.
Note that both x- and φ-axes are rescaled by a factor 1/N . This is because

Stochastic Interface Models 19
the ϕ-field represents a hypersurface embedded in d + 1 dimensional space.The functions hN are step functions. Sometimes interpolations by polilinearfunctions (or polygonal approximations) are also considered, see (6.9) and(6.20) below.
For the time evolution φt = φt(x);x ∈ Γ, t > 0 of the interface, we shallmostly work under the space-time diffusive scaling
hN (t, θ) =1
NφN2t([Nθ]). (2.17)
2.6 Quadratic potentials
Here we take a quadratic function V (η) = 12η
2 as a typical example of thepotential satisfying our basic conditions (2.2). To rewrite the HamiltonianH(φ) for such V , let us introduce the discrete Laplacian ∆ ≡ ∆Λ,ψ for Λ b Z
d
with boundary conditions ψ ∈ R∂+Λ
∆φ(x) =∑
y∈Λ:|x−y|=1
((φ ∨ ψ)(y) − φ(x)) , x ∈ Λ, (2.18)
where φ ∨ ψ ∈ RΛ stands for the height variables which coincide with φ on Λ
and with ψ on ∂+Λ, respectively; i.e., φ ∨ ψ(x) = φ(x) for x ∈ Λ and = ψ(x)for x ∈ ∂+Λ. The summation by parts formula proves that
H0Λ(φ) = −1
2(φ,∆Λ,0φ)Λ (2.19)
where (φ1, φ2)Λ =∑
x∈Λ φ1(x)φ2(x) denotes an inner product of φ1 and φ2 ∈RΛ. The boundary condition is taken ψ = 0 for simplicity. In particular, the
finite volume Gibbs measure µ0Λ can be expressed as
µ0Λ(dφΛ) =
1
Z0Λ
e12 (φ,∆Λ,0φ)Λ dφΛ,
and accordingly, φΛ forms a Gaussian field under the distribution µ0Λ with
mean 0 and covariance (−∆Λ,0)−1, the inverse operator of −∆Λ,0, see Sect.
3.1 for more details.For V (η) = 1
2η2, the corresponding dynamics (2.9) is a simple discrete
stochastic heat equation
dφt(x) = ∆φt(x)dt+√
2dwt(x), x ∈ Γ. (2.20)

20 T. Funaki
3 Gaussian equilibrium systems
As a warming up before studying general systems, let us consider the ∇ϕinterface model in the case where the potential is quadratic: V (η) = 1
2η2. The
corresponding system formed by the height variables φ is then Gaussian andsometimes called free lattice field or harmonic oscillator in physical literatures.For a Gaussian system, one can explicitly compute the mean, covariance (two-point correlation function) and characteristic functions. In particular, as weshall see, the covariance of our field φ can be represented by means of thesimple random walks on the lattice, Proposition 3.2. This will be extended togeneral potentials V and called the Helffer-Sjostrand representation, see Sect.4.1 below.
We begin with systems on finite and connected regions Λ(b Zd) in Sect. 3.1
and then, by taking the thermodynamic limit (i.e., Λ Zd), infinite systems
on Zd will be constructed in Sect. 3.2. We shall also discuss massive system
and see significant differences in massive and massless systems, for instance, inthe speed of decay of correlation functions or the dependence of the system onthe boundary conditions, see Sect. 3.3. Section 3.4 deals with the macroscopicscaling limits for ϕ and ∇ϕ-fields.
3.1 Gaussian systems in a finite region
We assume that Λ b Zd is connected. When V (η) = 1
2η2 and the boundary
conditions ψ ∈ R∂+Λ (or ψ ∈ R
Zd
or ψ ∈ RΛc) are given, the corresponding
Hamiltonian H(φ) ≡ HψΛ (φ) defined by (2.1) is a quadratic form of φ so that
the finite volume ϕ-Gibbs measure µψΛ ∈ P(RΛ) (or ∈ P(RZd
)) determined by(2.4) is Gaussian.
Harmonic functions and Green functions
The mean and covariance of the height variables φ = φ(x);x ∈ Λ under µψΛare computable by solving the Dirichlet boundary value problem on Λ for thediscrete Laplacian ∆. Indeed, we consider the difference equation on Λ withthe boundary condition ψ
∆φ(x) :=∑
y∈Zd:|x−y|=1
(φ(y) − φ(x)) = 0, x ∈ Λ,
φ(x) =ψ(x), x ∈ ∂+Λ,
(3.1)
which is equivalent to
∆Λ,ψφ(x) = 0, x ∈ Λ,
where ∆Λ,ψ is the discrete Laplacian determined by (2.18). The solution φ ≡φΛ,ψ = φ(x);x ∈ Λ of (3.1) is unique and called a (discrete) harmonicfunction on Λ.

Stochastic Interface Models 21
Let GΛ(x, y), x ∈ Λ, y ∈ Λ be the Green function (potential kernel) forthe discrete Laplacian ∆Λ,0 with boundary condition 0, i.e., the solution ofequations
−∆GΛ(x, y) = δ(x, y), x ∈ Λ,
GΛ(x, y) = 0, x ∈ ∂+Λ,(3.2)
where ∆ acts on the variable x and y is thought of as a parameter. In fact,GΛ(x, y);x, y ∈ Λ is the inverse matrix of −∆Λ(x, y);x, y ∈ Λ so that weshall denote
GΛ(x, y) = (−∆Λ)−1(x, y).
Mean, covariance and characteristic functions
The next proposition is an extension of the fact stated in Sect. 2.6 when theboundary conditions are ψ ≡ 0.
Proposition 3.1 (1) Under µψΛ, φ = φ(x);x ∈ Λ is Gaussian with mean
φΛ,ψ = φΛ,ψ(x);x ∈ Λ and covariance GΛ(x, y), i.e., µψΛ = N(φΛ,ψ, GΛ).In particular, for x, y ∈ Λ
EµψΛ [φ(x)] = φΛ,ψ(x), (3.3)
EµψΛ [φ(x);φ(y)] = GΛ(x, y), (3.4)
where
Eµ [φ(x);φ(y)] := Eµ [φ(x) −Eµ[φ(x)] φ(y) −Eµ[φ(y)]]
stands for the covariance of φ(x) and φ(y) under µ.
(2) The characteristic function of µψΛ is given by
EµψΛ
[
e√−1(ξ,φ)Λ
]
= exp
√−1(ξ, φΛ,ψ)Λ − 1
2(ξ, (−∆Λ)−1ξ)Λ
for ξ ∈ RΛ.
(3) If φ is µ0Λ-distributed, then φ+ φΛ,ψ is µψΛ-distributed.
Proof. A careful rearrangement of the sum in the HamiltonianHψΛ (φ) applying
the summation by parts formula leads us to
HψΛ (φ) = −1
2
(
(φ− φΛ,ψ), ∆Λ(φ− φΛ,ψ))
Λ
+1
2
∑
x∈Λ,y/∈Λ|x−y|=1
φΛ,ψ(y)∇φΛ,ψ(〈y, x〉),

22 T. Funaki
for every φ ∈ RΛ. This is an extension of (2.19) for 0-boundary conditions
and a discrete analogue of Green-Stokes’ formula. Note that the second termin the right hand side depends only on the boundary conditions ψ and not onφ. Therefore, we have that
µψΛ(dφΛ) =1
ZΛ,ψexp
1
2((φ − φΛ,ψ), ∆Λ(φ − φΛ,ψ))Λ
dφΛ
with a proper normalization constant ZΛ,ψ. This immediately shows the as-sertions (1) and (2). The third assertion (3) follows from (1) or (2).
It might be useful to give another proof for (1). Actually, to show (3.3),set its left hand side as h(x). Then, h(x) satisfies the equation (3.1). In fact,the boundary condition is obvious and, for x ∈ Λ,
∆h(x) = EµψΛ [∆φ(x)] = −EµψΛ
[
∂HΛ,ψ
∂φ(x)
]
= 0
by the integration by parts under µψΛ. The uniqueness of solutions of (3.1)proves (3.3). The proof of (3.4) is similar; one may check its left hand sidesolves (3.2) in place of GΛ(x, y). This can be shown again by the integrationby parts.
It is standard to calculate the mean, covariance and other higher momentsfrom the characteristic function. Indeed, for instance, (3.4) has the third proof:We may assume ψ ≡ 0 by translating the field φ by φΛ,ψ and in this case
Eµ0Λ [(ξ, φ)2Λ] = − d2
dα2Eµ
0Λ
[
e√−1α(ξ,φ)Λ
]
∣
∣
∣
∣
∣
α=0
= − d2
dα2eα2
2 (ξ,∆−1Λ ξ)Λ
∣
∣
∣
∣
∣
α=0
= (ξ, (−∆Λ)−1ξ)Λ.
Then, the identity (3.4) follows by taking ξ = δx, δy or δx+ δy in this formulaand computing their differences, where δx(·) = δ(x, ·). ut
In particular, for µN ≡ µ0DN
with Λ = DN taking D = (−1, 1)d and with0-boundary conditions, we have EµN [φ(O)] = 0 and the variance behaves asN → ∞
EµN [φ(O)2] = (−∆DN )−1(O,O) ≈
1, d ≥ 3,logN, d = 2,N, d = 1,
(3.5)
where ≈ means that the ratio of the both sides stays uniformly positive andbounded. The number of the sites neighboring to each site is 2d and thereforeone can expect that, as the lattice dimension d increases, the fluctuations ofthe interfaces become smaller, in other words, they gain more stiffness. The

Stochastic Interface Models 23
behavior (3.5) of the variance agrees with this observation. When d ≥ 3, thesecond moment stays bounded as N → ∞ and accordingly ϕ-Gibbs measureis normalizable in the sense that it admits the thermodynamic limit, see Sect.3.2. For general convex potentials V , Brascamp-Lieb inequality gives at leastthe corresponding upper bound in (3.5), see Sect. 4.2. When d = 1, φ(x) isessentially the pinned Brownian motion with discrete time parameter x ∈(−N,N) ∩ Z and therefore (3.5) is standard.
Random walk representation
Let X = Xtt≥0 be the simple random walk on Zd with continuous time
parameter t, i.e., the generator of X is the discrete Laplacian ∆ and the jumpof X to the adjacent sites is accomplished by choosing one of them with equalprobabilities after an exponentially distributed waiting time with mean 1
2d .Let τΛ be the exit time of X from the region Λ:
τΛ := inft ≥ 0; Xt ∈ Λc.
The transition probability of the simple random walk on Λ with absorbingboundary ∂+Λ is denoted by pΛ(t, x, y) ≡ Ex[1y(Xt), t < τΛ], t ≥ 0, x, y ∈Λ, where Ex[ · ] stands for the expectation for X starting at x: X0 = x. Then,the following representations are easy.
Proposition 3.2 For every x, y ∈ Λ, we have
φΛ,ψ(x) = Ex [ψ (XτΛ)] , (3.6)
GΛ(x, y) = Ex
[∫ τΛ
0
1y (Xt) dt
]
=
∫ ∞
0
pΛ(t, x, y) dt. (3.7)
3.2 Gaussian systems on Zd
Let us assume that a harmonic function ψ = ψ(x);x ∈ Zd ∈ R
Zd
is givenon the whole lattice Z
d and consider the Gaussian finite volume ϕ-Gibbs
measures µψΛ ∈ P(RZd
) for all connected Λ b Zd. We shall see that, if d ≥ 3,
µψΛ admits a weak limit µψ ∈ P(RZd
) as Λ Zd (i.e., along an increasing
sequence Λ(n)n=1,2,... satisfying ∪∞n=1Λ
(n) = Zd) and the limit µψ is a ϕ-
Gibbs measure (on Zd) corresponding to the potential V (η) = 1
2η2. A simple
but important class of the harmonic functions on Zd is given by ψ(x) = u·x+h
for u ∈ Rd and h ∈ R. The two-point correlation function of µψ decays
slowly in algebraic (i.e., polynomial) order. The ∇ϕ-Gibbs measures exist forarbitrary dimension d.

24 T. Funaki
Thermodynamic limit
Since φΛ,ψ = ψ on Λ for every harmonic function ψ, from (3.3), the mean of
φ under µψΛ is ψ. The covariance of µψΛ is GΛ(x, y), recall (3.4). Let G(x, y) ≡(−∆)−1(x, y) = G(x−y) be the Green function (of 0th order) of the operator∆ on Z
d, i.e.,
G(x, y) =
∫ ∞
0
p(t, x, y) dt, x, y ∈ Zd,
where p(t, x, y) denotes the transition probability of the simple random walkX on Z
d. It is well-known that G(x, y) < ∞ if and only if d ≥ 3 (i.e., if Xis transient). This can be also seen from an explicit formula for G(x) by theFourier transform:
G(x) =1
2(2π)d
∫
Td
e√−1x·θ
∑dj=1(1 − cos θj)
dθ, (3.8)
where Td = (−π, π]d and dθ =
∏dj=1 dθj . Since pΛ(t, x, y) ↑ p(t, x, y) as Λ
Zd, we have
limΛZd
GΛ(x, y) = G(x, y), x, y ∈ Zd.
To study the limit of µψΛ as Λ Zd, recalling Proposition 3.1-(3), we may
assume ψ ≡ 0. Let µ ∈ P(RZd
) be the distribution of a Gaussian systemφ = φ(x);x ∈ Z
d with mean 0 and covariance G(x, y), whose characteristicfunction is given by
Eµ[
e√−1(ξ,φ)
]
= e−12 (ξ,(−∆)−1ξ), ξ ∈ C0(Z
d; R),
where (ξ, φ) =∑
x∈Zdξ(x)φ(x) is the inner product and C0(Z
d; R) denotes
the family of all ξ : Zd → R satisfying ξ(x) = 0, x /∈ Λ for some Λ b Z
d. Theconvergence of the covariances
(ξ, (−∆Λ)−1ξ) =∑
x,y∈Zd
GΛ(x, y)ξ(x)ξ(y)
−→∑
x,y∈Zd
G(x, y)ξ(x)ξ(y) = (ξ, (−∆)−1ξ)
for ξ ∈ C0(Zd; R) (note that both sums are finite) implies the convergence of
the characteristic functions so that µ0Λ weakly converges to µ as Λ Z
d on
the space RZd
endowed with the product topology.In fact, the convergence holds under stronger topologies. To see that, let
us introduce weighted `2-spaces on Zd
`2(Zd, z) := φ ∈ RZd
; ‖φ‖2z :=
∑
x∈Zd
φ(x)2z(x) <∞

Stochastic Interface Models 25
for weight functions z = z(x) > 0;x ∈ Zd. We shall especially concern
with two classes of spaces (`2α, ‖ · ‖α) and (`2r, ‖ · ‖r) for α, r > 0 takingz(x) = (1 + |x|)−α and z(x) = e−2r|x|, respectively.
Proposition 3.3 Assume d ≥ 3. Then µ0Λ weakly converges to µ as Λ Z
d
on the spaces `2α, α > d or `2r, r > 0.
Proof. The proof is concluded once the tightness of µ0ΛΛ on these spaces
are shown. However, since
0 ≤ Eµ0Λ[
φ(x)2]
= GΛ(x, x) ≤ G(x, x) = G(O) <∞,
we have that supΛEµ0Λ [‖φ‖2
α] < ∞ and supΛ Eµ0Λ [‖φ‖2
r] < ∞. These uniformestimates imply the tightness noting that the imbeddings `2α1
⊂ `2α2or `2r1 ⊂
`2r2 are compact when 0 < α1 < α2 or 0 < r1 < r2, respectively. utRemark 3.1 Fernique’s theorem for Gaussian random variables shows that
supΛEµ
0Λ [eε‖φ‖
2α ] <∞, α > d,
for some ε > 0. In particular, this implies supΛ Eµ0Λ [‖φ‖kα] < ∞ for α > d
and k ∈ N. The same uniform estimates hold for the norm ‖φ‖r.Finally, let us show that the limit µ of µ0
Λ is actually a ϕ-Gibbs measure.The argument below is applicable also when the potentials V are general. We
call a function g = g(φ) on RZd
local if it is FΛ-measurable for some Λ b Zd
and the smallest Λ is denoted by supp (g).
Proposition 3.4 µ is a ϕ-Gibbs measure.
Proof. Let Σ b Zd, FΣ-measurable bounded function f and FΣc-measurable
bounded local function g be given. Then, if Λ is sufficiently large such thatΣ ∪ supp (g) ⊂ Λ, we have
Eµ0Λ [fg] = Eµ
0Λ [g(φ)Eµ
φΣ [f ]].
However, under the limit Λ Zd, the left and the right hand sides converge to
Eµ[fg] and Eµ[g(φ)EµφΣ [f ]], respectively. Thus we obtain the DLR equation
for µ. utIn summary, we see that for every harmonic function ψ on Z
d a weak limit
µψ ∈ P(RZd
) of µψΛ as Λ Zd exists and it is a ϕ-Gibbs measure.
Remark 3.2 (1) Take ψ(x) = u · x + h for the boundary conditions. Thenthe limit µψ is not the same for different h. In this sense the massless field isquite sensitive on the boundary conditions.(2) As the results on massive model ([20], see Remark 3.3 below) suggest,the extremal sets of ϕ-Gibbs measures might be much wider than µψ;ψ areharmonic. However, ∇ϕ-fields are exhausted, under the assumption of shiftinvariance (and temperedness), by the convex hull of the gradient fields asso-ciated to these fields (see Sect. 9).

26 T. Funaki
Long correlations
As we have seen, the two-point correlation function of φ under the ϕ-Gibbsmeasure µψ coincides with the Green function G(x, y) of the simple randomwalk on Z
d, and it decays only algebraically (or in polynomial order) and notexponentially fast. In this sense the field has long dependence.
Proposition 3.5 Assume d ≥ 3. Then the two-point correlation function ofµψ is always positive and behaves like
Eµψ
[φ(x);φ(y)] ∼ k1
|x− y|d−2
as |x− y| → ∞, where |x− y| stands for the Euclidean distance and ∼ meansthat the ratio of both sides converges to 1. The constant k1 is determined by
k1 =1
2
∫ ∞
0
(2πt)−d2 e−
12t dt.
Proof. The conclusion follows from the behavior G(x) ∼ k1/|x|d−2, |x| → ∞of the Green function established by Ito-McKean [190] (2.7, p.121); see alsoSpitzer [272], p.308, P1 for d = 3 and Lawler [215]. ut
This proposition, in particular, implies that one of the important thermo-dynamic quantities called the compressibility diverges in massless model:
∑
x∈Zd
Eµψ
[φ(x);φ(y)] = ∞.
Note that k1/|x−y|d−2, x, y ∈ Rd is the Green function on R
d and the constantk1 has another expression
k1 = (4πd/2)−1Γ
(
d
2− 1
)
=1
(d− 2)Ωd,
where Ωd is the surface area of the d− 1 dimensional unit sphere. For generalpotential V , similar asymptotics for the two-point correlation function areobtained by [237].
∇ϕ-Gaussian field
We have required the assumption d ≥ 3 to construct ϕ-field on the infinitevolume Z
d, but for its gradient the thermodynamic limit exists in arbitrarydimensions d including d = 1, 2. To see this, we first notice the next lemmawhich is immediate from Proposition 3.1-(1). Recall that
∇iφ(x) := φ(x + ei) − φ(x)(≡ ∇φ(x + ei)), x ∈ Zd, 1 ≤ i ≤ d.

Stochastic Interface Models 27
Lemma 3.6 Let Λ b Zd and ψ ∈ R
Zd
be given. Then we have
EµψΛ [∇iφ(x)] = ∇iφΛ,ψ(x), (3.9)
EµψΛ [∇iφ(x);∇jφ(y)] = ∇i,x∇j,yGΛ(x, y), (3.10)
for every x, y ∈ Λ, 1 ≤ i, j ≤ d, where ∇i,x and ∇j,y indicate that theseoperators act on the variables x and y, respectively.
When d = 1, 2, although GΛ(x, y) itself is not convergent as Λ Zd, its
normalization
GΛ(x, y) :=
∫ ∞
0
pΛ(t, x, y) − pΛ(t, 0, 0) dt
admits the finite limit
G(x, y) :=
∫ ∞
0
p(t, x, y) − p(t, 0, 0) dt, x, y ∈ Zd,
which is called the (normalized 0th order) Green function. One can replaceGΛ in the right hand side of (3.10) with GΛ so that the covariance of the∇ϕ-field has the limit as Λ Z
d. We therefore obtain the next proposition.
Proposition 3.7 For a harmonic function ψ on Zd, let µψ,∇ ∈ P(R(Zd)∗) be
the distribution of the Gaussian field on (Zd)∗ with mean and covariance
Eµψ,∇
[∇iφ(x)] = ∇iψ(x),
Eµψ,∇
[∇iφ(x);∇jφ(y)] = ∇i,x∇j,yG(x, y),
respectively. Then µψ,∇ is a ∇ϕ-Gibbs measure (see Definition 2.2 and Sect.9).
We have a family of ∇ϕ-Gibbs measures µψu,∇;u ∈ Rd by taking
ψ(x) ≡ ψu(x) := u · x. When d ≥ 3, if φ = φ(x);x ∈ Zd is µψ-
distributed, then its gradient field ∇φ = ∇φ(b); b ∈ (Zd)∗ is µψ,∇-distributed. When d = 1, the Green function is given by G(x) = − 1
2 |x|,which proves Eµ
ψ,∇
[∇φ(x);∇φ(y)] = δ(x− y). This, in particular, shows that∇φ(b); b ∈ (Z)∗ is an independent Gaussian system in one dimension. Whend = 2, the Green function behaves like
G(x) = − 1
2πlog |x| + c0 +O(|x|−2), |x| → ∞,
see Stohr [275], Spitzer [272].

28 T. Funaki
3.3 Massive Gaussian systems
In the present subsection, we study the ϕ-field associated with the massiveHamiltonian Hm(φ) introduced in Remark 2.2-(1). The mass term of Hm ac-tually has a strong influence on the field. It is localized and exhibits verydifferent features from the massless case. In particular, (1) the ϕ-Gibbs mea-sure exists for arbitrary dimensions d ≥ 1, (2) the effect of the boundaryconditions is weak (see Corollary 3.9 below) and (3) the two-point correla-tion function decays exponentially fast; in other words, the field has a strongmixing property.
Massive Gaussian ϕ-Gibbs measures
For Λ b Zd and the boundary condition ψ ∈ R
Zd
, the finite volume ϕ-Gibbsmeasure µψΛ;m ∈ P(RΛ) having mass m > 0 is defined by
µψΛ;m(dφΛ) :=1
ZψΛ;m
e−HψΛ;m(φ) dφΛ
where
HψΛ;m(φ) = Hψ
Λ (φ) +m2
2
∑
x∈Λφ(x)2
is the massive Hamiltonian and ZψΛ;m is the normalization constant. As before,
we sometimes regard µψΛ;m ∈ P(RZd
). The ϕ-Gibbs measure µ ≡ µm ∈ P(RZd
)
(on Zd) having massm is defined by means of the DLR equation with the local
specifications µψΛ;m in place of µψΛ in Definition 2.1. We are always concerning
the case where V (η) = 12η
2 throughout this section.
Finite systems
Similarly to the massless case, the mean and covariance of the field φ underµψΛ;m can be expressed as solutions of certain difference equations and admitthe random walk representation. Indeed, consider the equations (3.1) and (3.2)with ∆ replaced by ∆−m2, respectively, i.e.,
(∆−m2)φ(x) = 0, x ∈ Λ,
φ(x) = ψ(x), x ∈ ∂+Λ,(3.11)
and
−(∆−m2)GΛ;m(x, y) = δ(x, y), x ∈ Λ,
GΛ;m(x, y) = 0, x ∈ ∂+Λ,(3.12)
for y ∈ Λ. The solution of (3.11) is denoted by φ = φΛ,ψ;m, while GΛ;m(x, y)is sometimes written as

Stochastic Interface Models 29
GΛ;m(x, y) = (−∆Λ +m2)−1(x, y).
Consider the simple random walkX = Xtt≥0 on Zd as before and let σ be an
exponentially distributed random variable with mean 1m2 being independent
of X . The random walk X is killed at the time σ, in other words, it jumps toa point ∆(/∈ Z
d) at σ and stays there afterward. Every function ψ on Zd is
extended to Zd ∪ ∆ setting ψ(∆) = 0. The next proposition is an extension
of Propositions 3.1 and 3.2 to the massive case. The proof is similar.
Proposition 3.8 Under µψΛ;m, φ = φ(x);x ∈ Λ is Gaussian with mean
φΛ,ψ;m(x) and covariance GΛ;m(x, y). In particular, we have for x, y ∈ Λ
EµψΛ;m [φ(x)] = φΛ,ψ;m(x) = Ex [ψ (XτΛ∧σ)] , (3.13)
EµψΛ;m [φ(x);φ(y)] = GΛ;m(x, y) = Ex
[∫ τΛ∧σ
0
1y (Xt) dt
]
. (3.14)
Thermodynamic limit
The random walk representation is useful to observe that the limit of µψΛ;m
as Λ Zd does not depend on the boundary condition ψ if it grows at most
in polynomial order as |x| → ∞. This property for massive field is essentiallydifferent from the massless case. If ψ grows exponentially fast, its effect mayremain in the limit of µψΛ;m, see Remark 3.3 below.
Corollary 3.9 If the function ψ on Zd satisfies |ψ(x)| ≤ C(1+|x|n) for some
C, n > 0, then we have for every x ∈ Zd
limΛZd
φΛ,ψ;m(x) = 0.
Proof. To prove the conclusion, from (3.13), it suffices to show that Px(τΛ` <σ) = o(`−n) as ` → ∞, where Λ` = [−`, `]d ∩ Z
d. However, since P (σ >√`) = e−m
2√`, this follows from the large deviation type estimate on τΛ:
Px(τΛ` <√`) ≤ e−C` for some C > 0. ut
The covariance GΛ;m(x, y) of µψΛ;m converges as Λ Zd to Gm(x, y) =
Gm(x − y), where Gm(x) is defined by
Gm(x) :=
∫ ∞
0
e−m2tp(t, x, y) dt
=1
(2π)d
∫
Td
e√−1x·θ
2∑dj=1(1 − cos θj) +m2
dθ.
Note that, since m > 0, Gm(x) < ∞ for all d ≥ 1. The function Gm(x, y)is sometimes written as (−∆+m2)−1(x, y) and called the Green function of

30 T. Funaki
m2th order of the operator ∆ on Zd. When the boundary condition ψ satisfies
the condition in Corollary 3.9, the thermodynamic limit µm ∈ P(RZd
) of µψΛ;m
exists and it is the Gaussian measure with the mean 0, covariance Gm(x, y)and characteristic function
Eµm[
e√−1(ξ,φ)
]
= e−12 (ξ,(−∆+m2)−1ξ),
for ξ ∈ C0(Zd; R). The limit measure is independent of the choice of ψ as long
as it satisfies the condition in Corollary 3.9.
Remark 3.3 Benfatto et al. [20] characterized the structure of the class ofall massive Gaussian ϕ-Gibbs measures on R
Z when d = 1. Their result showsthat its extremal set E is given by
E = µα−,α+ ; (α−, α+) ∈ R2,
where µα−,α+ is the limit of the sequence of finite ϕ-Gibbs measures µψ[−`,`];mwith boundary condition ψ satisfying
α± = (1 − ρ2) lim`→∞
ρ`ψ(±(`+ 1))
for certain ρ ∈ (0, 1). For instance, if ψ is replaced by ψ+u·x+h, the constantsα± are the same. In this respect, ϕ-Gibbs measure is not much sensitive to
the boundary conditions. The mass term m2
2
∑
φ(x)2 has an effect to localizethe field. In fact, the above mentioned result implies that the shift invariantmassive Gaussian ϕ-Gibbs measure is unique in one dimension.
Short correlations
The exponential decay of the two-point correlation function
Eµm [φ(x);φ(y)] = Eµm [φ(x)φ(y)] = Gm(x− y)
under µm is precisely stated in the next proposition.
Proposition 3.10 (1) When d ≥ 2, for each ω ∈ Sd−1 (i.e., |ω| = 1), deter-mine b(ω) = bm(ω) ∈ R
d and γ ∈ R \ 0 by
1
2d
∑
|y|=1
eb·y =m2
2d+ 1,
1
2d
∑
|y|=1
yeb·y = γω.
Then, we have
Gm(x) ∼ Cd|x|−d−12 e−bm(x/|x|)·x

Stochastic Interface Models 31
as |x| → ∞ for some Cd > 0.(2) When d = 1, Gm(x) has an explicit formula:
Gm(x) =1
2π
∫ π
−π
e√−1xθ
2(1− cos θ) +m2dθ =
e−m|x|
2 sinh m, x ∈ Z
where m > 0 is the solution of an algebraic equation cosh m = m2
2 + 1. Inparticular, m behaves such that m = m+O(m2) as m ↓ 0.
Remark 3.4 Let Cm(x − y) = Cm(x, y), x, y ∈ Rd be the Green function of
m2th order for the (continuum) Laplacian on Rd, i.e.,
Cm(x) := (−∆+m2)−1δ(x) =1
(2π)d
∫
Rd
e√−1x·p
p2 +m2dp, x ∈ R
d.
The function Cm(x) has an expression by means of the modified Bessel func-tions. For example, when d = 3, we have
Cm(x) =1
4π|x|e−m|x|,
and, for general d ≥ 1, it behaves
Cm(x) ∼ const md−32 |x|− d−1
2 e−m|x|,
as m|x| → ∞, see [173] p.126. Note that the exponential decay rates for Gmand Cm are different, see also [268] p.257 for d = 2.
Proposition 3.10 gives the exact exponential decay rates of the Green func-tion Gm for m > 0. However, in order just to see the exponentially decayingproperty of Gm, one can apply the Aronson’s type estimate on the tran-sition probability p(t, x, y) = p(t, x− y) of the simple random walk on Z
d:
p(t, x) ≤ min
C
td/2e−|x|2/Ct, 1
, t > 0, x ∈ Zd, (3.15)
for some C > 0; see [237] §2, [56] for general random walks. In fact, we dividethe integral
Gm(x) =
∫ ∞
0
e−m2tp(t, x) dt
into the sum of those on two intervals [0, |x|) and [|x|,∞). Then, on the firstinterval, if x 6= 0, we estimate the integrand as
e−m2tp(t, x) ≤ C
td/2e−|x|2/2Cte−|x|2/2Ct
≤ C
td/2e−1/2Cte−|x|2/2C|x| ≤ const e−|x|/2C,

32 T. Funaki
while on the second
e−m2tp(t, x) ≤ e−
m2t2 e−
m2
2 |x|.
This proves that0 < Gm(x) ≤ Ce−c|x|, x ∈ Z
d,
for some c, C > 0. See [237] Theorem B for non-Gaussian case.The Aronson’s type estimate is applicable to the massless case as well and,
though it is weaker than Proposition 3.5, we have the following:
0 < G(x) ≤ C
|x|d−2,
for some C > 0 when d ≥ 3. In fact, the change of the variables t = |x|2s inthe integral implies
G(x) =
∫ ∞
0
p(t, x) dt ≤∫ ∞
0
C
td/2e−|x|2/Ct dt =
C
|x|d−2
∫ ∞
0
1
sd/2e−1/Cs ds.
Note that the last integral converges when d ≥ 3. See [237] Theorem C orTheorem 4.13 in Sect. 4.3 for non-Gaussian case.
3.4 Macroscopic scaling limits
The random field φ = φ(x);x ∈ Zd is a microscopic object and our goal is
to study its macroscopic behavior. In this subsection, we discuss such problemunder the Gaussian measures µ =: µ0 (massless case, d ≥ 3) and µm,m > 0(massive case, d ≥ 1). Recall that µ and µm are ϕ-Gibbs measures on Z
d
obtained by the thermodynamic limit with boundary conditions ψ ≡ 0; seeSects. 3.2 and 3.3, respectively.
Scaling limits
Let N be the ratio of typical lengths at macroscopic and microscopic levels.Then the point θ = (θi)
di=1 ∈ R
d at macroscopic level corresponds to thelattice point [Nθ] := ([Nθi])
di=1 ∈ Z
d at microscopic level, recall Sect. 2.5.If x ∈ Z
d is close to [Nθ] in such sense that |x − [Nθ]| N , then x alsomacroscopically corresponds to θ. This means that observing the random fieldφ at macroscopic point θ is equivalent to taking its sample mean around themicroscopic point [Nθ]. Such averaging yields a cancellation in the fluctuationsof φ.
Motivated by these observations, let us consider the sample mean of φover the microscopic region ΛN = (−N,N ]d ∩ Z
d, which corresponds to themacroscopic box D = (−1, 1]d:
φN
:=1
(2N)d
∑
x∈ΛNφ(x),
note that (2N)d = |ΛN |. The field φ is distributed under µm for m ≥ 0.

Stochastic Interface Models 33
Lemma 3.11 As N → ∞, φN
converges to 0 in L2 under µm for all m ≥ 0.
Proof. If we denote G(x) by G0(x), we have for all m ≥ 0
Eµm[
(
φN)2]
=1
(2N)2d
∑
x,y∈ΛNEµm [φ(x)φ(y)] =
1
(2N)2d
∑
x,y∈ΛNGm(x− y).
However, the Green functions admit bounds for some C, c > 0
0 < Gm(x) ≤
C
|x|d−2, m = 0, d ≥ 3,
Ce−c|x|, m > 0, d ≥ 1,
which prove the conclusion. ut
This lemma is the law of large numbers for ϕ-field and the next natural
question is to study the fluctuation of φN
around its limit 0 under a properrescaling. As we shall see, the necessary scalings will change according asm = 0 (i.e., massless case) or m > 0 (i.e., massive case) due to the differencein the mixing property of the field φ.
Fluctuations in massive ϕ-Gaussian field
First, let us consider the massive case: m > 0. Then the right scaling for the
fluctuation of φN
will be
ΦN := (2N)d2 φ
N ≡ 1
(2N)d2
∑
x∈ΛNφ(x). (3.16)
Since (2N)d2 = |ΛN | 12 , this is the usual scaling for the central limit theorem;
recall that φ = φ(x);x ∈ Zd distributed under µm has a “nice” exponential
mixing property when m > 0.
Proposition 3.12 The fluctuation ΦN weakly converges to the Gaussian dis-tribution N(0,m−2) with mean 0 and variance m−2 as N → ∞.
Proof. Since ΦN is Gaussian distributed with mean 0, the conclusion followsfrom the convergence of its variance:
Eµm[
(
ΦN)2]
=1
(2N)d
∑
x,y∈ΛNGm(x − y) −→
N→∞
1
m2,
note (1) in the next remark. ut

34 T. Funaki
Remark 3.5 From Bricmont et al. [45] Proposition A1 (p. 294), we have forµm,m > 0
(1)∑
x∈Zd
Eµm [φ(O)φ(x)] = m−2,
(2)∑
x∈Zd
Eµm [φ(O)∇iφ(x)] ∼ constm−1 (m ↓ 0),
(3)∑
x∈Zd
Eµm [∇iφ(O)∇iφ(x)] is absolutely converging for each m and stays
bounded as m ↓ 0 (see Lemma 3.13 below).
However, if i 6= j,
(4)∑
x∈Zd
Eµm [∇iφ(O)∇jφ(x)] ∼ const | logm| (m ↓ 0).
Loosely speaking, as m ↓ 0, φ is expected to converge to the massless field sothat its covariances (or those of its gradients) might behave like |x− y|2−d (ormaking its gradients in x), and this may prove that
∑
x∈Zd
Eµm [∇iφ(O)∇jφ(x)] ≈∫ R
r(2−d)−2 · rd−1 dr ≈ logR,
where R ≈ m−1 is the correlation length.
Fluctuations in massless ϕ-Gaussian field
Next, let us consider the massless case: m = 0 and d ≥ 3. Let φ be µ0-distributed. Since the variance m−2 of the limit distribution of ΦN under µmdiverges as m ↓ 0, the scaling (3.16) must not be correct in the masslesscase. However, if we further scale-down the value of ΦN dividing it by N andintroduce
ΦN :=1
NΦN ≡ 1
(2N)d2 ·N
∑
x∈ΛNφ(x), (3.17)
then it has the limit under µ0. In fact, the variance of ΦN behaves
Eµ0
[
(
ΦN)2]
= 2−dN−d−2∑
x,y∈ΛNG(x− y)
∼ k1N−2
∑
x∈ΛN|x|2−d ∼ k1N
−2
∫
|θ|≤N|θ|2−d dθ
= k1N−2
∫ N
0
r(2−d)+(d−1) dr = O(1).
Therefore, (3.17) is the right scaling when m = 0. This actually coincideswith the interpretation stated in Sect. 2.5: φ = φ(x);x ∈ Z
d represents theheight of an interface embedded in d + 1 dimensional space so that both x-and φ-axes should be rescaled by the factor 1/N at the same time.
If we introduce random signed measures on Rd by

Stochastic Interface Models 35
ΦN (dθ) :=1
Nd2 +1
∑
x∈Zd
φ(x)δx/N (dθ), θ ∈ Rd, (3.18)
then ΦN in (3.17) is represented as ΦN = 2−d/2〈ΦN (·), 1D〉, where 〈ΦN (·), f〉stands for the integral of f = f(θ) under the measure ΦN (·). In this way,studying the limit of ΦN is reduced to investigating more general problem forthe properly scaled empirical measures of φ.
Fluctuations in massless ∇ϕ-Gaussian field
When f = f(θ) has the form f = − ∂g∂θi
with certain g = g(θ), we can rewrite
〈ΦN (·), f〉 as
〈ΦN (·), f〉 =
⟨
ΦN (·),− ∂g
∂θi
⟩
= −N− d2−1
∑
x∈Zd
φ(x)∂g
∂θi(x/N)
∼ −N−d2−1
∑
x∈Zd
φ(x) ·Ng((x+ ei)/N) − g(x/N)
= −N−d2
∑
x∈Zd
(φ(x − ei) − φ(x))g(x/N)
= N−d2
∑
x∈Zd
∇iφ(x)g((x + ei)/N).
The second line is the approximation of ∂g∂θi
by its discrete derivatives. This
rearrangement, in particular, implies that the scaling in ΦN (dθ) coincides withthe usual one of the central limit theorem, if one deals with the correspondinggradient fields ∇φ = ∇φ(x);x ∈ Z
d instead of φ.Thus it is natural to introduce the scaled empirical measures of ∇φ =
∇iφ; 1 ≤ i ≤ d:
ΨNi (dθ) ≡ ΨNi (dθ;u) :=1
Nd2
∑
x∈Zd
∇iφ(x) − uiδx/N(dθ). (3.19)
The field ∇φ is µ∇u -distributed, where µ∇
u , u = (ui)di=1 ∈ R
d is the ∇ϕ-Gibbsmeasure µψu,∇ having boundary conditions ψ(x) = ψu(x) ≡ u · x obtained
in Proposition 3.7. Note that ui = Eµ∇u [∇iφ(x)] and, since ∇iφ(x) − ui =
∇i(φ−ψu)(x), the distribution of ΨNi (dθ;u) under µ∇u coincides with that of
ΨNi (dθ; 0) under µ∇0 . We may therefore assume u = 0 to study the limit. The
limit of the variance Eµ∇0
[
〈ΨNi , g〉2]
as N → ∞ can be computed based onthe next lemma.
Lemma 3.13∑
y∈Zd
Eµ∇0 [∇iφ(O)∇iφ(y)] =
1
d.

36 T. Funaki
Proof. Each term in the sum can be rewritten as
Eµ [(φ(ei) − φ(O))(φ(y + ei) − φ(y))]
=1
(2π)d
∫
Td
2e√−1y·θ − e
√−1(y−ei)·θ − e
√−1(y+ei)·θ
2∑dj=1(1 − cos θj)
dθ
=1
(2π)d
∫
Td
e√−1y·θ 1 − cos θi
∑dj=1(1 − cos θj)
dθ,
which implies
d∑
i=1
Eµ∇0 [∇iφ(O)∇iφ(y)] =
1
(2π)d
∫
Td
e√−1y·θ dθ = δ(y).
The conclusion is shown by taking the sum in y ∈ Zd of the both sides of this
identity. ut

Stochastic Interface Models 37
4 Random walk representation and fundamental
inequalities
We are now at the position to enter into the ∇ϕ interface model for gen-eral convex potentials V satisfying the three basic conditions (V1)-(V3) in(2.2). We shall first establish in this section three fundamental tools for ana-lyzing the model, i.e., Helffer-Sjostrand representation, FKG (Fortuin-Kasteleyn-Ginibre) inequality and Brascamp-Lieb inequality. Helffer-Sjostrand representation describes for the correlation functions under theGibbs measures by means of a certain random walk in random environments.Its original idea comes from [180], [271]. This representation readily impliesFKG and Brascamp-Lieb inequalities. The latter is an inequality between thecovariances of non-Gaussian fields and those of Gaussian fields, which we canexplicitly compute as we have seen in Sects. 3.1 and 3.2. In particular, uniformmoment estimates on the non-Gaussian fields are obtained and these make uspossible to construct ∇ϕ-Gibbs measures on (Zd)∗ (for every d ≥ 1) and ϕ-Gibbs measures on Z
d (for d ≥ 3) by passing to the thermodynamic limit.The arguments in this section heavily rely on the convexity of the potentialV , i.e., the attractiveness of the interaction.
4.1 Helffer-Sjostrand representation and FKG inequality
Idea behind the representation
Let us shortly explain the idea behind the Helffer-Sjostrand representation.It gives the following identity for the covariance of F = F (φ) and G = G(φ)under the Gibbs measure µ:
Eµ[F ;G] =∑
x∈Zd
∫ ∞
0
Eµ[∂F (x, φ0)∂G(Xt, φt)] dt. (4.1)
In the right hand side, φ0 is µ-distributed, Xt is the random walk on Zd
starting at x with (temporary inhomogeneous) generator Qφt defined by
Qφf(x) =∑
y:|x−y|=1
V ′′(φ(x) − φ(y)) f(y) − f(x) ,
for f : Zd → R. Indeed, assuming Eµ[G] = 0, let H be the solution of the
Poisson equation −LH = G, where L is the generator of φt determined by(2.15) with Γ = Z
d. Then, from (2.14)
Eµ[F ;G] = Eµ[F (−LH)] =∑
x∈Zd
Eµ[∂F (x, φ)∂H(x, φ)]. (4.2)
However, a simple computation (cf. (4.7) below) shows

38 T. Funaki
∂(LH)(x, φ) = L∂H(x, φ) + (Q∂H(·, φ)) (x) ≡ (L+Q)∂H (x, φ)
and therefore
∂H(x, φ) = (L+Q)−1∂(LH) =
∫ ∞
0
∂G(Xt, φt) dt.
This implies the identity (4.1). The above argument is rather formal and,in particular, one should replace the measure µ with finite volume Gibbsmeasure [85] or with Gibbs measure for ∇ϕ-field [169]. Note that the convexitycondition on V (i.e., V ′′ ≥ 0) is essential for the existence of Xt.
Precise formulation
Let the finite region Λ b Zd and the boundary condition ψ ∈ R
Zd
be given. Weshall consider slightly general Hamiltonian having external field (chemicalpotential) ρ = ρ(x);x ∈ Λ ∈ R
Λ:
Hψ,ρΛ (φ) = Hψ
Λ (φ) − (ρ, φ)Λ (4.3)
and the corresponding finite volume ϕ-Gibbs measure
µψ,ρΛ (dφΛ) =1
Zψ,ρΛ
e−Hψ,ρΛ (φ) dφΛ ∈ P(RΛ), (4.4)
where Zψ,ρΛ is the normalization constant. This generalization will be usefulfor the proof of Brascamp-Lieb inequality cf. Lemma 4.6 and Theorem 4.9.The operator Lψ,ρΛ defined by
Lψ,ρΛ F (φ) :=eHψ,ρΛ (φ)
∑
x∈Λ
∂
∂φ(x)
e−Hψ,ρΛ (φ) ∂F
∂φ(x)
=∑
x∈Λ
∂2F
∂φ(x)2− ∂Hψ,ρ
Λ
∂φ(x)
∂F
∂φ(x)
for F = F (φ) ∈ C2(RΛ) is symmetric under the measure µψ,ρΛ and the associ-ated Dirichlet form is given by
E(F,G) ≡Eψ,ρΛ (F,G) := −Eµψ,ρΛ
[
F · Lψ,ρΛ G]
=Eµψ,ρΛ [(∂F, ∂G)Λ] . (4.5)
Recall that ∂F is defined by
∂xF (φ) ≡ ∂F (x, φ) :=∂F
∂φ(x)
and

Stochastic Interface Models 39
(∂F, ∂G)Λ ≡ (∂F, ∂G)Λ(φ) :=∑
x∈Λ∂F (x, φ)∂G(x, φ).
For each φ ∈ RΛ, the operator QφΛ ≡ Qφ,ψΛ,0 is introduced by
QφΛf(x) :=∑
b∈Λ∗:y(b)=x
V ′′(∇(φ ∨ ψ)(b))∇(f ∨ 0)(b)
=∑
y∈Λ:|x−y|=1
V ′′(φ(x) − (φ ∨ ψ)(y))((f ∨ 0)(y) − f(x)),
for x ∈ Λ and f = f(x);x ∈ Λ ∈ RΛ under the boundary conditions φ(x) =
ψ(x) and f(x) = 0 for x ∈ ∂+Λ. In particular, when V (η) = 12 cη
2, c > 0,
Qφ,ψΛ,0 = c∆Λ,0, which is independent of φ and ψ. We further consider theoperator
L ≡ Lψ,ρΛ := Lψ,ρΛ +QψΛ,0
acting on the functions F = F (x, φ) on Λ × RΛ, where QψΛ,0F (x, φ) :=
Qφ,ψΛ,0F (x, φ) is the operator acting on functions with two variables. The next
lemma is simple, but explains the reason why the operator Qφ,ψΛ,0 is useful.
Lemma 4.1 For every x ∈ Λ and F = F (φ), we have
[∂x, Lψ,ρΛ ] ≡ ∂xL
ψ,ρΛ − Lψ,ρΛ ∂x = −
∑
y∈Λ
∂2Hψ,ρΛ
∂φ(x)∂φ(y)∂y, (4.6)
∂Lψ,ρΛ F (x, φ) = L∂F (x, φ). (4.7)
Proof. (4.6) is obvious from the definition of Lψ,ρΛ . (4.7) follows from (4.6) bynoting the symmetry of V ′′ and
∂2Hψ,ρΛ
∂φ(x)∂φ(y)=
∑
z∈Λ:|x−z|=1
V ′′(φ(x) − (φ ∨ ψ)(z)), x = y,
−V ′′(φ(x) − φ(y)) , |x− y| = 1,
0 , otherwise,
for x, y ∈ Λ. ut
Let φt ≡ φρt = φt(x);x ∈ Λ be the process on RΛ generated by Lψ,ρΛ ,
i.e., the solution of the SDEs (2.9) with H = Hψ,ρΛ :
dφt(x) = −∑
y∈Λ:|x−y|=1
V ′(φt(x) − φt(y))dt
+ ρ(x)dt+√
2dwt(x), x ∈ Λ,
φt(y) = ψ(y), y ∈ ∂+Λ.
(4.8)

40 T. Funaki
Let Xt be the random walk on Λ with temporally inhomogeneous generatorQφtΛ . Then, L is the generator of (Xt, φt). Note that the random walkXt existssince its jump rate V ′′(∇(φt ∨ ψ)(b)) is positive from our assumption (V3).
Theorem 4.2 (Helffer-Sjostrand representation) The correlation func-
tion of F = F (φ) and G = G(φ) under µψ,ρΛ has the representation
Eµψ,ρΛ [F ;G] =
∑
x∈Λ
∫ ∞
0
Eδx⊗µψ,ρΛ [∂F (x, φ0)∂G(Xt, φt), t < τΛ] dt. (4.9)
In the right hand side, δx ⊗ µψ,ρΛ indicates the initial distribution of (Xt, φt)and δx ∈ P(Λ) is defined by δx(z) = δ(z − x). In particular, the distribution
of φ0 is µψ,ρΛ and the random walk Xt starts at x. τΛ = inft > 0;Xt ∈ Λc isthe exit time of Xt from Λ.
Theorem 4.2 with special choice of F (φ) = φ(x) and G(φ) = φ(y) givesthe following extension of the formula (3.7) combined with (3.4) for quadraticpotentials to general ones; note that ∂F (z, φ) = δ(x− z) in this case.
Corollary 4.3 For every x, y ∈ Λ,
Eµψ,ρΛ [φ(x);φ(y)] = Eδx⊗µ
ψ,ρΛ
[∫ τΛ
0
1y (Xt) dt
]
.
The function F = F (φ) on RΛ is called increasing if it satisfies ∂F =
∂F (x, φ) ≥ 0 so that it is nondecreasing under the semi-order on RΛ de-
termined by “φ1 ≥ φ2, φ1, φ2 ∈ RΛ ⇐⇒ φ1(x) ≥ φ2(x) for every x ∈ Λ”.
Theorem 4.2 immediately implies the following inequality.
Corollary 4.4 (FKG inequality) If F and G are both (L2-integrable) in-creasing functions, then we have
Eµψ,ρΛ [F ;G] ≥ 0,
namely,
Eµψ,ρΛ [FG] ≥ Eµ
ψ,ρΛ [F ]Eµ
ψ,ρΛ [G] .
So far, we have been concerning with the representation of correlationfunctions. The next proposition gives the formula for the expectation of φ(x),which is an extension of (3.3) with (3.6) for quadratic potentials.
Proposition 4.5 For x ∈ Λ, we have
EµψΛ [φ(x)] =
∫ 1
0
Eδx⊗µsψΛ [ψ (XτΛ)] ds.

Stochastic Interface Models 41
Introducing the external field ρ has an advantage in the next lemma, whichis indeed one of the tricks commonly used in statistical mechanics. We shalldenote the variance of the random variable X under µ by
var (X ;µ) = Eµ[
(X −Eµ[X ])2]
.
Lemma 4.6 Assume ρ, ν ∈ RΛ. Then we have
d
dsEµ
ψ,sρΛ [φ(x)] = Eµ
ψ,sρΛ [φ(x); (ρ, φ)Λ ] , (4.10)
Eµψ,ρΛ
[
exp
(ν, φ)Λ −Eµψ,ρΛ [(ν, φ)Λ]
]
= exp
∫ 1
0
ds
∫ s
0
var ((ν, φ)Λ;µψ,ρ+s1νΛ ) ds1
. (4.11)
The left hand side of (4.11) is the generating function of (ν, φ)Λ subtractedits mean and sometimes called the free energy in physics.
4.2 Brascamp-Lieb inequality
A bound on the covariances under non-Gaussian ϕ-Gibbs measures by thoseunder Gaussian ϕ-Gibbs measures is called the Brascamp-Lieb inequality.More precisely, for every ν = ν(x);x ∈ Λ ∈ R
Λ, we have
var 〈ν, φ〉Λ ≤ var ∗〈ν, φ〉Λ,
where φ in the left hand side is the field distributed under µψΛ determined fromthe general convex potential V , while it is distributed in the right hand sideunder the Gaussian ϕ-Gibbs measures µψ,GΛ determined from the quadraticpotential V ∗(η) = 1
2c−η2. Note that the difference of these two potentials
V − V ∗ is still convex. Brascamp-Lieb inequality claims that the strongerconvexity of the potential has larger effect on the ϕ-field to localize it aroundits mean. This looks plausible from physical point of view. Brascamp-Liebinequality does not give any information on the mean of φ itself.
The original proof due to [40], [41] of this inequality is rather complicated,but now a simpler proof based on Helffer-Sjostrand representation is available.We prepare a lemma, in which we denote R
Λ by L2(Λ, dx) with countingmeasure dx on Λ.
Lemma 4.7 (1) For every f, g ∈ RΛ, we have
(g,−Qφ,ψΛ,0f)Λ =1
4
∑
b∈Λ∗
V ′′(∇φ(b))∇f(b)∇g(b)
+∑
x∈Λ,y/∈Λ|x−y|=1
V ′′(φ(x) − ψ(y))f(x)g(x).

42 T. Funaki
In particular, Qφ,ψΛ,0 is symmetric on L2(Λ, dx) for every φ ∈ RΛ.
(2) As symmetric operators on L2(Λ× RΛ, dx× µρΛ,ψ), we have
−Lψ,ρΛ ≥ −QψΛ,0.
(3) For every φ ∈ RΛ, as symmetric operators on L2(Λ, dx), we have
−Qφ,ψΛ,0 ≥ −c−∆Λ,0,
where c− is the positive constant in (V3).
Proof. (1) is a simple calculation. From (1), we see that QψΛ,0 is symmetric on
L2(Λ×RΛ, dx×µρΛ,ψ). On the other hand, the identity (4.5) for the Dirichlet
form implies that −Lψ,ρΛ is nonnegative and symmetric on this space. Thus(2) is shown. (3) is obvious from (1) by taking f = g and noting V ′′ ≥ c−. ut
Now we state the Brascamp-Lieb inequality between the covariances underµψ,ρΛ and µψ,GΛ , which is the Gaussian finite volume ϕ-Gibbs measure deter-mined from the quadratic potential V ∗ without external field.
Theorem 4.8 (Brascamp-Lieb inequality) For every ν ∈ RΛ, we have
var ((ν, φ)Λ;µψ,ρΛ ) ≤ var ((ν, φ)Λ;µψ,GΛ ). (4.12)
Proof. Taking F = G = (ν, φ)Λ in (4.2), since ∂H =(
−Lψ,ρΛ)−1
∂G, the left
hand side of (4.12) is rewritten as
∑
x∈ΛEµ
ψ,ρΛ
[
ν(x)
(
(
−Lψ,ρΛ)−1
ν
)
(x, φ)
]
,
which is bounded above by
≤∑
x∈ΛEµ
ψ,ρΛ
[
ν(x)(
−Qφ,ψΛ,0)−1
ν(x)
]
≤∑
x∈Λν(x) (−c−∆Λ,0)
−1ν(x),
from Lemma 4.7-(2), (3). However, the last term coincides with the right handside of (4.12). utTheorem 4.9 (Brascamp-Lieb inequality for exponential moments)We have
Eµψ,ρΛ
[
e(ν,φ−〈φ〉)Λ]
≤ e12var ((ν,φ)Λ;µψ,GΛ ). (4.13)
In particular,
Eµψ,ρΛ
[
e|(ν,φ−〈φ〉)Λ|]
≤ 2e12 var ((ν,φ)Λ;µψ,GΛ ), (4.14)
where 〈φ〉 = Eµψ,ρΛ [φ].

Stochastic Interface Models 43
Proof. (4.13) follows from (4.11) and Theorem 4.8. For (4.14), use e|x| ≤ex + e−x. ut
Since the right hand side of (4.13) is Eµψ,GΛ [e(ν,φ)Λ ], the exponential mo-
ments subtracted their means under ϕ-Gibbs measures are bounded above bythose under the Gaussian measures.
Remark 4.1 (1) An estimate of Fernique’s type on
Eµψ,ρΛ
[
eε(ν,φ−〈φ〉)2Λ]
for some ε > 0 is known. This is a stronger estimate than (4.13), see [121],Proposition 1.1.6.(2) For FKG or other basic inequalities used in statistical mechanics, see [173],[269]. The relation to Witten’s Laplacian is discussed in [179].
4.3 Estimates of Nash-Aronson’s type and long correlation
This section establishes the long correlation under the ϕ- and ∇ϕ-Gibbs mea-sures. The Helffer-Sjostrand representation is combined with Nash-Aronson’stype estimates on the transition probability of the random walk in randomenvironments.
Let X = (Xt)t≥0 be the random walk on Zd with jump rates cx,±ei(t)
from x to its adjacent sites y = x± ei at time t satisfying the symmetry
cx,±ei(t) = cx±ei,∓ei(t)
and the uniformity0 < c− ≤ cx,±ei(t) ≤ c+. (4.15)
Then its transition probability p(s, x; t, y) = P (Xt = y|Xs = x), t ≥ s ≥0, x, y ∈ Z
d admits the following three estimates (Propositions 4.10-4.12) ofNash-Aronson’s type. The constants C1, C2 and C > 0 depend only on d andc±.
Proposition 4.10 (Giacomin-Olla-Spohn [169], Proposition B3, B4) For ev-ery t ≥ s ≥ 0 and x, y ∈ Z
d, we have
p(s, x; t, y) ≤ C1
(t− s)d/2∗
exp
− |x− y|C1(t− s)
1/2∗
.
In addition, if |x− y| ≤√
(t− s)∗ is satisfied, then we have
p(s, x; t, y) ≥ C2
(t− s)d/2∗
,
where (t− s)∗ := (t− s) ∨ 1.

44 T. Funaki
Proposition 4.11 (Delmotte-Deuschel [73]) For every t ≥ s ≥ 0 and x, y ∈Zd, we have
p(s, x; t, y) ≤ C
(t− s)d/2e−Γ (|x−y|,t−s)/C ,
where
Γ (x, t) ≥
|x|2t, t ≥ |x| (long time regime),
|x|√t, t < |x| (Poisson regime).
Especially when the jump rates are given by cx,±ei(t) = V ′′(∇φt(〈x ±ei, x〉)), the transition probability is denoted by pφ·(s, x; t, y). The above twoestimates on p are quenched, i.e., hold uniformly in the environment φt. Forits gradient ∇pφ· , we have only annealed estimate:
Proposition 4.12 ([73]) For every t ≥ s ≥ 0, b ∈ (Zd)∗ and y ∈ Zd, we have
EµψΛ
[
∣
∣∇pφ·(s, ·; t, y)(b)∣
∣
2]
12 ≤ C
(t− s)(d+1)/2e−Γ (|xb−y|,t−s)/C ,
where ∇ = ∇x acts on the variable x.
Nash-Aronson’s type estimates are applicable to derive estimates on thecorrelation functions under the Gibbs measures. The next theorem is an ex-tension of Proposition 3.5 for Gaussian fields to general convex potentials.
Theorem 4.13 (Naddaf and Spencer [237]) Assume d ≥ 3. Then there existC, c > 0, which depend only on d and c±, such that
0 ≤ EµψΛ [φ(x);φ(y)] ≤ C
|x− y|d−2,
for every x, y ∈ Zd. Furthermore, for ϕ-Gibbs measure µ on Z
d which istempered, shift invariant, mean 0 and ergodic under the spatial shift (cf. Sect.4.5), we have
c
|x− y|d−2≤ Eµ [φ(x);φ(y)] ≤ C
|x− y|d−2
for every x, y ∈ Zd.
Proof. (Giacomin [164] §3.3) From Corollary 4.3 of Helffer-Sjostrand repre-sentation and Proposition 4.10, we have that
EµψΛ [φ(x);φ(y)] ≤
∫ ∞
0
EµψΛ
[
pφ·
Λ (0, x; t, y)]
dt
≤∫ ∞
0
EµψΛ
[
pφ·(0, x; t, y)]
dt
≤ C1e− 1C1
|x−y|+
∫ ∞
1
C1
td/2e− |x−y|
C1t1/2 dt,

Stochastic Interface Models 45
where pφ·
Λ (0, x; t, y) = P (Xt = y, t < τΛ|X0 = x) is the transition probabilityof the random walk killed at the time when it goes outside of Λ. The lastintegral is, after making a simple change of variables |x− y|−2t = t′, boundedby
≤ C1
|x− y|d−2
∫ ∞
0
1
td/2e− 1
C1t1/2 dt =
C ′
|x− y|d−2.
Note that this integral converges since d ≥ 3. The lower bound follows againfrom Proposition 4.10:
Eµ [φ(x);φ(y)] =
∫ ∞
0
Eµ[
pφ·(0, x; t, y)]
dt
≥ C2
∫ ∞
|x−y|2
dt
td/2=
C2(d− 2)
2|x− y|d−2.
ut
For the ∇ϕ-fields, the following estimate holds.
Proposition 4.14 The dimensions d ≥ 1 are arbitrary. We have for everyx, y ∈ Z
d∣
∣
∣EµψΛ [∇φ(b);∇φ(b′)]
∣
∣
∣ ≤ C
|xb − xb′ |d−1.
Proof. Take F (φ) = ∇φ(b) and G(φ) = ∇φ(b′) in Helffer-Sjostrand represen-tation (Theorem 4.2). Then, since ∂F (x, φ) = 1x=xb − 1x=yb, one obtains
EµψΛ [∇φ(b);∇φ(b′)]
=
∫ ∞
0
EµψΛ
[
∇x∇ypφ·
Λ (0, ·; t, ·)(b, b′)]
dt.
To estimate this integral, we divide the interval [0,∞) into the sum of [0, 1)and [1,∞) as in the proof of Theorem 4.13, and for the latter integral we rudely
estimate |∇x∇ypφ·
Λ (b′)| ≤ |∇xpφ·
Λ (xb′)|+|∇xpφ·
Λ (yb′)| and use Proposition 4.12.ut
As we have seen, the correlation functions of Gibbs measures decay slowlyand this makes the proof of CLT or LDP difficult. One can say that the loopcondition (see (L) in Sect. 2.3) for ∇ϕ-field yields the long dependence.
Remark 4.2 It is expected that the estimate in Proposition 4.14 can be elab-orated as
∣
∣
∣EµψΛ [∇φ(b);∇φ(b′)]
∣
∣
∣ ≤ C
|xb − xb′ |d,
but this is still not proven at this moment, see the final remark of Giacomin[164] §3. For the potential V (η) = η2 + λη4, λ > 0, the decay of correlationsis discussed in [45], [46], [161], [228], [48]; see also [121] and (3.5) of [157].

46 T. Funaki
4.4 Thermodynamic limit and construction of ∇ϕ-Gibbs measures
The next theorem is shown by taking thermodynamic limit for a sequence offinite volume ∇ϕ-Gibbs measures with periodic boundary conditions, see Sect.9.2 (and Definition 2.2) for the class (ext G∇)u of measures. The tightness ofthe sequence of measures is a consequence of Brascamp-Lieb inequality. Thismethod is applicable only to strictly convex potentials.
Theorem 4.15 ([157]) (existence of ∇ϕ-Gibbs measures) For every u ∈Rd, there exists µ∇ =: µ∇
u ∈ (extG∇)u, i.e., a tempered, shift invariant,mean u and ergodic ∇ϕ-Gibbs measure µ∇
u exists. Furthermore, it satisfies
Eµ∇u [eβ(η(b)−ub)2 ] < ∞ for some β > 0, where ub = ui if the bond b is i-
directed.
Proof. Let TdN = (Z/NZ)d be the lattice torus of sizeN and let T
d,∗N be the set
of all directed bonds in TdN . Let X
TdNbe the family of all η ∈ R
Td,∗N satisfying
the loop conditions (see Sect. 9.2) on the torus, and define µ∇N,u ∈ P(X
TdN) by
µ∇N,u(dη) :=
1
ZN,uexp
−1
2
∑
b∈Td,∗N
V (η(b) + ub)
dηN , (4.16)
where ZN,u is the normalization constant and dηN is the uniform measure onthe affine space XTdN
. Let µ∇N,u be the distribution of η(b) := η(b)+ub under
µ∇N,u. Then, from the Brascamp-Lieb inequality (on the torus), we have for
every λ > 0
supN,u∈Rd
Eµ∇N,u [eλ|η(b)−ub|] <∞. (4.17)
This implies the tightness of the measures µ∇N,uN . Accordingly, along a
proper subsequence N ′ → ∞, µ∇N ′,u converges to a certain measure µ∇
u . One
can easily show that µ∇u ∈ G∇, Eµ
∇u [η(ei)] = ui, E
µ∇u [eλ|η(b)−ub|] < ∞ and
from Proposition 4.14
∣
∣
∣Eµ
∇u [η(b); η(b′)]
∣
∣
∣≤ C
|xb − xb′ |d−1.
We may now suppose d ≥ 2, since µ∇u is a linear combination of Bernoulli
measures when d = 1 (see Remark 4.4 below), and in this case this boundimplies the ergodicity of µ∇
u . ut
Remark 4.3 The periodic boundary conditions are taken for the limit mea-sure µ∇
u to be automatically shift invariant. Instead, one may consider the
sequence µψuΛ` ` with the Dirichlet boundary conditions ψu(x) ≡ u ·x and the
distributions µ∇,ψuΛ`
` of ∇ϕ-field under µψuΛ` . Then the tightness of µ∇,ψuΛ`
`is similar, however, the shift invariance of the limit measures seems nontrivial.

Stochastic Interface Models 47
Remark 4.4 In one dimension µ∇u is the Bernoulli measure, i.e., under µ∇
u ,∇φ(x) ≡ φ(x+ 1)− φ(x);x ∈ Z is an i.i.d. sequence and the distribution ofeach ∇φ(x) is given by the Cramer transform of ν(dη) = 1
Z e−V (η) dη ∈ P(R).
In other words, if we define νλ ∈ P(R) for λ ∈ R by (5.25) and determine thefunction λ = λ(u) of u ∈ R by the relation E νλ [η] = u (see Sect. 5.5), thenwe have
µ∇u (dη) =
∏
x∈Z
νu(dη(x)) ∈ P(RZ), η = η(x);x ∈ Z,
where νu = νλ(u). Indeed, [175] Theorem 3.5 shows that µ∇,ψuΛ`
in Remark 4.3
converges to this µ∇u as `→ ∞. In particular, in one dimension, the potential
V needs not be convex, but the conditions (1.3)-(1.6) in [175] (with V (η) inplace of φ(x)) are sufficient.
4.5 Construction of ϕ-Gibbs measures
The Gibbs measures for ∇ϕ-field have been constructed for all dimensionsd, but the Gibbs measures for ϕ-field are unnormalizable (i.e., finite volumeGibbs measures for ϕ-field do not converge as Λ Z
d) if d ≤ 2 and normal-izable if d ≥ 3. We have indeed the following theorem. The shift invariance ofµh is not clear (cf. Remark 4.3).
Theorem 4.16 If d ≥ 3, for every h ∈ R, there exists a ϕ-Gibbs measureµ ≡ µh on Z
d with mean h, i.e., Eµ[φ(x)] = h for all x ∈ Zd.
Proof. Consider the sequence of finite ϕ-Gibbs measures µ0Λ`
∈ P(RZd
)`with 0-boundary conditions. Then, by the symmetry of V , the mean is 0:
Eµ0Λ` [φ(x)] = 0. When d ≥ 3, since the variance GΛ`(x, x) of the Gaussian
system is uniformly bounded in `, Brascamp-Lieb inequality (Theorem 4.9)proves
supx∈Zd
sup`∈N
Eµ0Λ`
[
eλ|φ(x)|]
<∞, λ > 0.
Therefore, the sequence µ0Λ`` is tight and has a limit µ along a proper
subsequence `′ → ∞. It is obvious that µ is a ϕ-Gibbs measure with mean 0.The distribution µh of φ+ h, where φ is µ-distributed, is a ϕ-Gibbs measurewith mean h. ut

48 T. Funaki
5 Surface tension
The surface tension σ = σ(u), u ∈ Rd physically describes the macroscopic
energy of a surface with tilt u, i.e., a d dimensional hyperplane located inRd+1 with normal vector (−u, 1) ∈ R
d+1. It is mathematically a fundamentalquantity, as it will appear in several limit theorems, e.g., in the rate functionalof LDP or diffusion coefficient in the hydrodynamic limit.
5.1 Definition of surface tension
The surface tension will be defined thermodynamically from the HamiltonianH(φ) in such a way to reflect statistical property of random interfaces with
mean tilt u. Let ψu ∈ RZd
, u = (ui)di=1 ∈ R
d, be tilted height variablesdetermined by ψu(x) = u · x, x ∈ Z
d and set for ` ∈ N
σ∗` (u) = − 1
|Λ`|logZψuΛ`
= − 1
(2`+ 1)dlog
∫
RΛ`
exp
−HψuΛ`
(φ)
dφΛ` , (5.1)
where Λ` = [−`, `]d ∩ Zd is a cube with side length 2` + 1 and ZψuΛ` is the
normalization constant given by (2.5) with the boundary condition ψu. Thefunction σ∗
` (u) is the specific free energy of interfaces with tilt u insistedthrough the boundary condition. Note that |Λ`| = (2`+1)d is the order of thesurface area of the boundary of interfaces settled in d + 1 dimensional spaceRd+1.
One can show, based on the subadditivity of σ∗` in `, that its limit as
`→ ∞ exists.
Theorem 5.1 ([157]) The limit
σ∗(u) = lim`→∞
σ∗` (u) ∈ [−∞,∞)
exists.
We shall normalize the limit function σ∗(u) as σ(u) = σ∗(u) − σ∗(0) sothat σ(0) = 0; note that σ∗(u) ∈ (−∞,∞) is shown comparing with the caseof quadratic potentials, see Sect. 5.2. The function σ(u), u ∈ R
d is called the(normalized) surface tension. By Theorem 5.1, we have
σ(u) = − lim`→∞
1
|Λ`|log
ZψuΛ`Zψ0
Λ`
. (5.2)
The ratio ZψuΛ` /Zψ0
Λ`is roughly equal to the probability to find interfaces with
mean tilt u under µψ0
Λ`and therefore

Stochastic Interface Models 49
µ(
tilt of hN ∼ u)
N→∞
exp−Ndσ(u), (5.3)
for the ϕ-Gibbs measure µ (with tilt 0) and macroscopically scaled heightvariables hN defined by (2.16). This broadly explains the meaning of thesurface tension.
Definition due to [265]
Sheffield [265] gives a different but actually an equivalent definition for the
surface tension. Let µfreeΛ be the finite volume ϕ-Gibbs measure on Λ b Zd
given by (2.4) and determined from the free boundary condition, i.e., theHamiltonian (2.1) is taken as the sum for all 〈x, y〉 ⊂ Λ only. Denote the
distribution of ∇φ(b); b ∈ Λ∗ under µfreeΛ by µ∇,freeΛ∗ ∈ P(RΛ
∗
). Recall thatfor two probability measures µ and ν
H(µ|ν) = Eµ[
logdµ
dν
]
(5.4)
defines the relative entropy of µ with respect to ν. Then, the specific free
energy of shift invariant measure µ∇ ∈ P(R(Zd)∗) is defined by the relativeentropy with respect to the ∇ϕ-Gibbs measure with free boundary conditionper site:
F (µ∇) = lim`→∞
1
|Λ`|H(µ∇
Λ∗`|µ∇,freeΛ∗`
), (5.5)
where µ∇Λ∗`
stands for the marginal distribution of ∇φ(b); b ∈ Λ∗` under µ∇.
The surface tension has another expression
σ(u) = infµ∇:mean u
F (µ∇), (5.6)
where the infimum is taken over all shift invariant µ∇ ∈ P(R(Zd)∗) with mean
tilt u: Eµ∇
[η(ei)] = ui for every 1 ≤ i ≤ d.Sheffield establishes the variational characterization for the ∇ϕ-Gibbs
measures for general tilt u: the minimizer µ∇ ≡ µ∇,(u) of (5.6) is in fact
the ∇ϕ-Gibbs measure for each u. This tells that µ∇,(u)Λ∗`
= µ∇Λ∗` ,u
(= the
distribution of ∇φ(b); b ∈ Λ∗` under µψuΛ` ) and for such µ∇, since one can
expect that the free boundary condition may be replaced with the 0-boundarycondition, the specific free energy F (µ∇) is the limit of
1
|Λ`|H(µ∇
Λ∗` ,u
|µ∇Λ∗` ,0
) ∼ − 1
|Λ`|log
ZψuΛ`Zψ0
Λ`
as ` → ∞. This coincides with the definition (5.2) of the normalized surfacetension.

50 T. Funaki
5.2 Quadratic potentials
The surface tension is explicitly computable for quadratic potentials.
Proposition 5.2 Assume V (η) = c2η
2, c > 0. Then, the corresponding un-normalized surface tension σ∗(u) ≡ σ∗
c (u) is given by
σ∗c (u) =
1
2c|u|2 − 1
2log 2πc−1 − 1
2lim`→∞
1
|Λ`|log det(−∆Λ`,0), (5.7)
where det(−∆Λ`,0) denotes the determinant of −∆Λ`,0 regarding it as a |Λ`|×|Λ`| matrix and |u| =
√
∑di=1 u
2i stands for the Euclidean norm of u. The
eigenvalues of ∆Λ`,0 are known (see, e.g., [173] p.185, (9.5.12) or [134]) andtherefore det(−∆Λ`,0) is specifically computable.
Proof. Since ψu is harmonic, we have φΛ`,ψu = ψu and therefore, from theproof of Proposition 3.1
ZψuΛ` = e−c2B`,u
∫
RΛ`
ec2 ((φ−ψu),∆Λ`,0(φ−ψu))
Λ` dφΛ` , (5.8)
where B`,u is the boundary term defined by
B`,u =∑
x∈Λ`,y/∈Λ`|x−y|=1
ψu(y)∇ψu(〈y, x〉).
However, the integral in the right hand side of (5.8) can be rewritten as
=
∫
RΛ`
e− c
2 (φ,−∆Λ`,0φ)Λ` dφΛ` = (2πc−1)|Λ`|/2√
det(−∆Λ`,0),
while the boundary term is equal to
B`,u = 2d∑
i=1
∑
|yj |≤`,j 6=i(uj · yj + ui(`+ 1))ui
= 2(`+ 1)(2`+ 1)d−1|u|2.In this way σ∗
` (u) in (5.1) is explicitly calculated and the conclusion followsby taking the limit `→ ∞. ut
By the basic conditions (2.2) on V , the potential V is in general estimatedby quadratic functions both from above and below:
V (0) +1
2c−η
2 ≤ V (η) ≤ V (0) +1
2c+η
2.
This proves the following bounds on the unnormalized surface tension σ∗(u)corresponding to V
σ∗c−(u) + d · V (0) ≤ σ∗(u) ≤ σ∗
c+(u) + d · V (0),
which, in particular, implies σ∗(u) ∈ (−∞,∞).

Stochastic Interface Models 51
5.3 Fundamental properties of surface tension
Here we summarize several properties of the surface tension. In the case ofquadratic potentials, the (normalized) surface tension is given by σc(u) =c2 |u|2 as we have seen in Proposition 5.2 and all properties listed below areobvious.
The following theorem and its corollary indicate that the function σ isstrictly convex, symmetric, σ ∈ C1 and its derivative ∇σ is Lipschitz contin-uous; in particular, a surface with gentle slope has low energy.
Theorem 5.3 ([157]; [85], [169] for (3)) The function σ = σ(u) ∈ [0,∞)enjoys the following properties.(1) (regularity) σ ∈ C1(Rd) and ∇σ = (∂σ/∂ui)
di=1 is Lipschitz continuous,
i.e., for some C > 0,
|∇σ(u) −∇σ(v)| ≤ C|u− v|, u, v ∈ Rd. (5.9)
(2) (symmetry) σ(−u) = σ(u).(3) (strict convexity) With constants c−, c+ > 0 in (V3) of (2.2), we havefor every u, v ∈ R
d that
1
2c−|u− v|2 ≤ σ(v) − σ(u) − (v − u) · ∇σ(u) ≤ 1
2c+|u− v|2. (5.10)
The Lipschitz continuity of ∇σ is shown based on the coupling used for theproof of Theorem 9.3 with the help of (5.14) below. The strict convexity of σis a consequence of uniform strict convexity of σ∗
` in `. See the next subsectionfor the proof. Theorem 5.3-(3) implies the following.
Corollary 5.4 For every u, v ∈ Rd, we have that
c−|u− v|2 ≤ (u− v) · (∇σ(u) −∇σ(v)) ≤ c+|u− v|2. (5.11)
In particular,c−|u|2 ≤ u · ∇σ(u) ≤ c+|u|2. (5.12)
Proof. The first estimate (5.11) is immediate by taking the sum of each sideof (5.10) with itself, but with u and v replaced by each other. The second(5.12) is from (5.11) with v = 0 noting that ∇σ(0) = 0. ut
Problem 5.1 Theorem 5.3-(1) nearly establishes “σ ∈ C2(Rd)”, but this isactually not yet proved and, indeed, remains to be one of the important openproblems. Such problem on the regularity of σ is related to the CLT (Sects. 8,11). See also a recent approach by Caputo and Ioffe [54].
Remark 5.1 (Physical argument on σ) For the SOS model or the sine-Gordon model, which is its continuous-spin version in a sense, the surfacetension may have a cusp at u = 0 and therefore σ /∈ C1 in general, see

52 T. Funaki
Frohlich and Spencer [131], [274]. This reflects the phenomena called rough-ening transition. Moreover, if the potential V is non-convex, it is conjecturedthat σ need not be in C1; i.e., the singularity of σ is related to the phasetransition of first order exhibited by the system. See Fernandez et al. [113].
Theorem 5.5 ([157]) (Thermodynamic identities)
ui = Eµ∇u [η(ei)], (5.13)
∂σ
∂ui(u) = Eµ
∇u [V ′(η(ei))] , (5.14)
u · ∇σ(u) + 1 = Eµ∇u
[
d∑
i=1
η(ei)V′(η(ei))
]
, (5.15)
where µ∇u ∈ P(X ) is the unique probability measure in (ext G∇)u, in other
words, ∇ϕ-pure phase, see Sect. 9.2.
The identity (5.13) is just by definition, while (5.15) is shown by the inte-gration by parts for similar integrals appearing in σ∗
` , see Lemma 5.7 below.
5.4 Proof of Theorems 5.3 and 5.5
The first lemma is to replace the boundary conditions ψu in (5.2) with theperiodic boundary conditions as we have done in the proof of Theorem 4.15.
Lemma 5.6 Let ZN,u be the normalization constant in (4.16) and set
σN (u) = − 1
|TdN | logZN,uZN,0
.
Then we haveσ(u) = lim
N→∞σN (u).
This lemma is more convenient for us than (5.2), since the ∇ϕ-Gibbsmeasure µ∇
u was constructed under the periodic boundary conditions.
Lemma 5.7 Let µ∇N,u ∈ P(XTdN
) be the measure introduced in the proof ofTheorem 4.15. Then we have the following three identities:
ub = Eµ∇N,u [η(b)], (5.16)
∂σN∂ui
(u) = Eµ∇N,u [V ′(η(ei))] , (5.17)
u · ∇σN (u) + 1 = Eµ∇N,u
[
d∑
i=1
η(ei)V′(η(ei))
]
. (5.18)

Stochastic Interface Models 53
Proof. Since∑
b∈Ci η(b) = 0 holds for every η ∈ XTdN
along with the
closed loop Ci parallel to the ith axis, the shift invariance of µ∇N,u implies
Eµ∇N,u [η(b)] = 0. This shows (5.16). To see (5.17), noting that V ′(η) =
−V ′(−η), we rewrite its left hand side as
− 1
|TdN |ZN,u∂
∂ui
∫
e− 1
2
b∈Td,∗N
V (η(b)+ub)dηN
=1
|TdN |ZN,u
∫
∑
b′∈Td,∗N :b′‖ei
V ′(η(b′) + ub′)e− 1
2
b∈Td,∗N
V (η(b)+ub)dηN
and this coincides with the right hand side, where b′ ‖ ei means that the bondb′ is i-directed. Finally, the third identity (5.18) follows from
∑
b∈Td,∗N
Eµ∇N,u [η(b)V ′(η(b) + ub)] = 2|TdN |, (5.19)
since the right hand side of (5.18) is equal to
1
2|TdN |∑
b∈Td,∗N
Eµ∇N,u [(η(b) + ub)V
′(η(b) + ub)]
and if we note (5.17). However, the left hand side of (5.19) can be rewrittenas
∑
b∈Td,∗N
∫
RTdN
\O∇φ(b)V ′(∇φ(b) + ub)F (φ)
∏
x∈TdN\O
dφ(x)
= −2∑
y∈TdN
∫
RTdN
\Oφ(y)
∂F
∂φ(y)(φ)
∏
x∈TdN\Odφ(x)
= 2∑
y∈TdN
∫
RTdN
\OF (φ)
∏
x∈TdN\Odφ(x) = 2|TdN |,
by the integration by parts, where φ(O) = h is arbitrarily taken and we set
F (φ) =1
ZN,ue− 1
2
b∈Td,∗N
V (∇φ(b)+ub),
for φ = φ(x);x ∈ TdN \ O. This concludes (5.19). ut
Proof (Theorems 5.3 and 5.5). As we have seen in the proof of Theorem 4.15,µ∇N,u weakly converges to µ∇
u as N → ∞ (we actually need not to take thesubsequence). Therefore, noting the uniform estimate (4.17), we obtain
limN→∞
Eµ∇N,u [V ′(η(ei))] = Eµ
∇u [V ′(η(ei))]. (5.20)

54 T. Funaki
This convergence is uniform in u in any bounded set of Rd. Let us take the
limit N → ∞ in the following trivial identity
σN (u) − σN (v) =
∫ 1
0
(u− v) · ∇σN (tu+ (1 − t)v) dt. (5.21)
From Lemma 5.6 the left hand side converges to σ(u) − σ(v), while the limitof the right hand side is computable by (5.17) and (5.20), and we have
σ(u) − σ(v) =
∫ 1
0
d∑
i=1
(ui − vi)Eµ∇tu+(1−t)v [V ′(η(ei))] dt.
However, the uniqueness of the ergodic ∇ϕ-Gibbs measure for each tilt u (seeTheorem 9.5 and Corollary 9.6 below) implies that, as un → u, µ∇
un weakly
converges to µ∇u . This, in particular, proves that Eµ
∇u [V ′(η(ei))] is continuous
in u. Thus we have shown that σ ∈ C1(Rd) and the identity (5.14). Thesymmetry of σ(u) follows from that of σ`(u), which is readily seen from thesymmetry of the potential V . The identity (5.15) is a consequence of (5.18)by letting N → ∞.
To prove the Lipschitz continuity (5.9) of ∇σ, we need to apply the dy-namic coupling (see Sect. 9). In fact, by noting (5.14) and
|V ′(η(ei)) − V ′(η(ei))| ≤ c+ |η(ei) − η(ei)| ,
we obtain (5.9) from Lemma 9.8.The proof of the strict convexity (5.10) is only left. To this end, it suffices
to show (5.10) for σN in place of σ. Consider the Hessian of σN :
D2σN (u) =
(
∂2σN∂ui∂uj
)
1≤i,j≤d.
Then, for every λ = (λi)di=1 ∈ R
d, we have that
(
D2σN (u)λ, λ)
=d∑
i=1
λ2iE
µ∇N,u [V ′′(ηi(O))]
− 1
|TdN |var
d∑
i=1
λi∑
x∈TdN
V ′(ηi(x));µ∇N,u
. (5.22)
Indeed, this identity follows by computing ∂2 logZN,u/∂ui∂uj . In the lefthand side ( , ) denotes the inner product of R
d, while ηi(x) := η(〈x + ei, x〉)in the right hand side. Since the second term in the right hand side of (5.22)is nonpositive, we obtain from V ′′ ≤ c+ the upper bound
(
D2σN (u)λ, λ)
≤ c+|λ|2. (5.23)

Stochastic Interface Models 55
In order to get the lower bound, we use the Helffer-Sjostrand representationfor the ϕ-field on T
dN \ O defined by
φ(x) =∑
b∈CO,xη(b), x 6= O,
where CO,x is a chain connecting O and x. We may think of φ(O) = 0. Set
F (φ) =
d∑
i=1
λi∑
x∈TdN
V ′(φ(x + ei) − φ(x)).
Then, since
∂F (x, φ) =
d∑
i=1
λi V ′′(φ(x) − φ(x − ei)) − V ′′(φ(x + ei) − φ(x)) ,
from Theorem 4.2 (and its proof), we have the representation
var (F ;µ∇N,u) =
∑
x∈TdN\O
⟨
∂F (x, φ)(−L)−1∂F (x, φ)⟩
.
Here 〈 · 〉 denotes the expectation under µ∇N,u and L = L0
TdN\O,0 +Qφ,0TdN\O,0.
The right hand side can be further rewritten into
supf=f(x,φ)
2∑
x∈TdN\O〈f(x, φ)∂F (x, φ)〉 −
∑
x∈TdN\O〈f(x, φ)(−L)f(x, φ)〉
,
where the functions f satisfy the condition f(O, φ) = 0. However, each termin the above supremum can be rewritten as
∑
x∈TdN\O
〈f(x, φ)∂F (x, φ)〉 =∑
x∈TdN
d∑
i=1
λi〈∇if(x, φ)V ′′(ηi(x))〉,
∑
x∈TdN\O
〈f(x, φ)(−L)f(x, φ)〉 =∑
x∈TdN
d∑
i=1
〈V ′′(ηi(x))(∇if(x, φ))2〉
+∑
x∈TdN\O
⟨
(
∂f
∂φ(x)
)2⟩
,
and, therefore, we have from (5.22) that

56 T. Funaki
(
D2σN (u)λ, λ)
=1
|TdN | inff
∑
x∈TdN
d∑
i=1
〈V ′′(ηi(x))(λi −∇if(x, φ))2〉
+∑
x∈TdN\O
⟨
(
∂f
∂φ(x)
)2⟩
.
Since V ′′ ≥ c−, this identity implies
(
D2σN (u)λ, λ)
≥ c−|TdN | inf
f
∑
x∈TdN
d∑
i=1
〈(λi −∇if)2〉.
However, by estimating
∑
x∈TdN
d∑
i=1
〈(λi −∇if)2〉 =∑
x∈TdN
d∑
i=1
(λ2i + 〈(∇if)2〉) ≥ |TdN | · |λ|2,
we finally get the lower bound
(
D2σN (u)λ, λ)
≥ c−|λ|2. (5.24)
Now (5.23) and (5.24) establish (5.10) for σN , since we have
σN (v) − σN (u) − (v − u) · ∇σN (u)
=
∫ 1
0
dt
∫ t
0
(
D2σN (u+ s(v − u))(v − u), v − u)
ds
for every u, v ∈ Rd. Letting N → ∞ shows (5.10) for σ. ut
5.5 Surface tension in one dimensional systems
In one dimension (i.e., for interfaces in 1+1 dimensional space), the ∇ϕ-Gibbsmeasures are simple Bernoulli measures (cf. Remark 4.4) and the features ex-hibited by them are completely different from the higher dimensional systems.In some cases, however, the surface tension σ = σ(u), u ∈ R is explicitly com-putable and this might be useful to see.
Define νλ ∈ P(R) and normalization constant Zλ by
νλ(dη) =1
Zλe−V (η)+λη dη, (5.25)
Zλ =
∫
R
e−V (η)+λη dη,

Stochastic Interface Models 57
respectively, and introduce a function u = u(λ) as
u = E νλ [η] ≡ d
dλlog Zλ, λ ∈ R.
Then, since
u′(λ) = E νλ[
(
η −E νλ [η])2]
> 0,
u is strictly increasing in λ and therefore it admits an inverse function λ =λ(u). The function λ actually coincides with the differential of the surfacetension σ:
σ′(u) = λ(u).
Indeed, from (5.14) , we have an expression σ′(u) = E νλ [V ′(η)] in one dimen-sion and, by integration by parts, one can easily find that the expectation inthe right hand side is equal to λ(u). The normalized surface tension is thusgiven by
σ(u) =
∫ u
0
λ(v) dv, u ∈ R. (5.26)
Since σ′′ = λ′ > 0, one can see that σ is strictly convex and smooth.Except for the normalization, the surface tension can be expressed as the
Legendre transform of log Zλ:
σ(u) = supλ
λu− log Zλ
. (5.27)
Indeed, denoting the right hand side of (5.27) by σ(u), supλ is attained atλ = λ(u) and
λ = σ′(u) ⇐⇒ u = u(λ)
holds, see [175], (1.12) or [231], (1.2).We give three examples of V for which σ = σ(u) is explicitly computable
based on the formula (5.26).
Example 5.1 V (η) = c2η
2 with c > 0. A simple computation shows u(λ) =1cλ whose inverse function is λ(u) = cu. Therefore, we have σ(u) = 1
2cu2 and
this coincides with Proposition 5.2.
Example 5.2 V (η) = c|η| with c > 0. This potential does not satisfy theconditions (V1) and (V3) in (2.2), but σ(u) are computable. The measure νλis defined only for |λ| < c and, by an explicit computation, we have
u(λ) =2λ
c2 − λ2, |λ| < c.
Its inverse function is
λ(u) =
√1 + c2u2 − 1
u, u ∈ R,

58 T. Funaki
so that the surface tension is given by
σ(u) =
∫ |u|
0
√1 + c2v2 − 1
vdv, u ∈ R.
Incidentally, since λ(u) → ±c as u→ ±∞, the function σ is linearly growingas |u| → ∞.
Example 5.3 V (η) = c1η (η ≥ 0) and V (η) = −c2η (η ≤ 0) with c1, c2 > 0.This potential is even asymmetric and as the Hamiltonian we adopt the sumof positively directed bonds only: H(φ) =
∑
x V (∇φ(x)), where ∇φ(x) = φ(x+1) − φ(x), cf. Remark 2.1. Then, similarly to Example 5.2, we have
u(λ) =2λ+ c2 − c1
(c2 + λ)(c1 − λ), −c2 < λ < c1.
Especially if c2 = +∞, we have
u(λ) =1
c1 − λ, λ(u) = c1 −
1
u,
and therefore, except normalization,
σ(u) = c1u− logu, u > 0.
The condition c2 = +∞ means that η = ∇φ(x) ≥ 0 is only realizable un-der the Gibbs measures µ∇
u . In other words, the graph of interfaces is alwaysincreasing.

Stochastic Interface Models 59
6 Large deviation and concentration properties
This section starts the analysis on the limit procedure under the scaling (2.16)which connects microscopic interface height variables φ = φ(x) with macro-scopic ones hN = hN(θ). We shall establish the LDP for hN asN → ∞ and,as its application, obtain two types of LLNs under the (canonical) ϕ-Gibbsmeasures.
The LDP for the ∇ϕ interface model was first studied by Ben Arousand Deuschel [17] in Gaussian case. They considered the field φ(x);x ∈DN, DN = (0, N)d ∩ Z
d, which is distributed under the finite volume ϕ-Gibbs measure µ0
N ≡ µ0DN
with V (η) = 12η
2 having 0-boundary conditionψ = 0. The field is then conditioned in such a manner that φ(x) ≥ 0 andmacroscopic total volume = v (i.e. N−d∑
x∈DN φ(x) = v). They proved forthe conditioned field that on several kind of scalings the macroscopic heightvariables hN = hN(θ); θ ∈ D = (0, 1)d converge as N → ∞ to h∗ = h∗(θ)which minimizes the total surface tension 1
2
∫
D |∇h|2dθ under the three con-ditions: h = 0 at ∂D, h ≥ 0 and
∫
Dhdθ = v. The function h∗ describes the
Wulff shape.Deuschel, Giacomin and Ioffe [85] generalized the results to the non-
Gaussian setting. They considered the finite volume ϕ-Gibbs measure µ0N
with 0-boundary conditions for general macroscopic domain D and generalpotential V satisfying (2.2), and proved the LD estimates, that is, the prob-ability that hN is close to a given macroscopic surface h ∈ H1
0 (D) behavesas
µ0N
(
hN ∼ h)
N→∞
exp−NdΣD(h), (6.1)
where ΣD(h) is the (integrated) total surface tension (or sometimes calledsurface free energy) of h defined by
ΣD(h) =
∫
D
σ(∇h(θ)) dθ, (6.2)
and σ = σ(u) is the (normalized) surface tension with tilt u ∈ Rd introduced in
Sect. 5. Roughly saying, the asymptotic behavior (6.1) is obtained by patchingthe relation (5.3) for localized systems. Mathematically precise formulation for(6.1) is the usual LD upper and lower bounds, see Theorem 6.1 below. ThisLDP result is an analogue of that by Dobrushin, Kotecky and Shlosman [93]for the Ising model and ΣD(h) corresponds to the Wulff functional (1.1).
These results can be further generalized for the system with weak selfpotential (one-body potential) under general Dirichlet boundary conditionsψ. We therefore state the LDP result in such settings; Sect. 6.1 for higherdimensions and Sect. 6.3 for one dimension. As an application, the LLN isproved for the ϕ-Gibbs measures (without conditioning) and the limit profile ischaracterized by a variational problem which was studied by Alt and Caffarelli[10] and others. The minimizers generate free boundaries inside the domain;Sects. 6.2 and 6.3. We also discuss the ∇ϕ interface model for δ-pinning with

60 T. Funaki
quadratic potential in one dimension; Sect. 6.4. Sect. 6.5 outlines the proof ofTheorem 6.1. Sect. 6.6 is devoted to the LDP for empirical measures of ϕ-fielddistributed under the Gaussian ϕ-Gibbs measures on Z
d when d ≥ 3. This issometimes called the third level LDP.
6.1 LDP with weak self potentials
Setting and assumptions
A bounded domain D in Rd with piecewise Lipschitz boundary is given and
microscopic regions DN , DN and ∂+DN , N ∈ Z+ in Zd are defined from D,
recall Sect. 1.4. The regularity assumption on ∂D is needed to employ someresults in the PDE theory. The boundary condition ψ = ψ(x);x ∈ ∂+DNfor microscopic height variables is given.
We assume the space is filled by a media changing in the distances fromDN . Such situation can be realized by adding self potentials (one-body po-
tentials) U : D × R → R to the original Hamiltonian HψN (φ) ≡ Hψ
DN(φ)
introduced in (2.1) with boundary condition ψ in the following manner
Hψ,UN (φ) =
∑
〈x,y〉⊂DN
V (φ(x) − φ(y)) +∑
x∈DNU( x
N, φ(x)
)
. (6.3)
The first term in the right hand side is HψN (φ) and the interaction potential V
is always assumed to satisfy the conditions (2.2). The statistical ensemble forthe height variables φ is then defined by the finite volume ϕ-Gibbs measureon DN
µψ,UN (dφ) =1
Zψ,UN
exp
−Hψ,UN (φ)
dφDN , (6.4)
where Zψ,UN ≡ Zψ,UDNis a normalization factor so that µψ,UN ∈ P(RDN ). We
shall regard µψ,UN ∈ P(RDN ) by considering φ(x) = ψ(x) for x ∈ ∂+DN under
µψ,UN as before. When U ≡ 0, µψ,0N coincides with µψN ≡ µψDN defined by (2.4).We consider the case that the self potential U is represented as a product
U(θ, r) = Q(θ)W (r) of two functions Q : D → [0,∞) and W : R → R andassume the following conditions on Q and W , respectively:
(Q) Q is bounded and piecewise continuous,
(W) W is measurable and there exists A ≥ 0 such (6.5)
that limr→+∞
W (r) = 0, limr→−∞
W (r) = −A and
W (r) ∈ [−A, 0] for every r ∈ R.
The self potential U is called weak since it is bounded. A typical example ofW we have in mind is a function of the form
W (r) = −A · 1r<0, r ∈ R. (6.6)

Stochastic Interface Models 61
This potential describes the situation that the space is filled by two differentmedia above and below the hyperplane DN . Since we assume A ≥ 0, the neg-ative values are more favorable than the positive ones for the interface heightvariables φ under the Gibbs measures. In other words the interface is weaklyattracted to the negative side, namely by the media below the hyperplaneDN . The opposite case A ≤ 0 can be easily reduced to our case A ≥ 0 byturning the interfaces upside down by the map φ 7→ −φ and ψ 7→ −ψ. More-over, adding a constant to W does not make any change in the Gibbs measureµψ,UN so that, without loss of generality, we have assumed limr→+∞W (r) = 0in (6.5)-(W).
The microscopic boundary condition ψ should be scaled to have macro-scopic limits. We therefore assume that the following conditions hold forψ ∈ R
∂+DN with some g ∈ C∞(Rd)
(ψ1) maxx∈∂+DN
|ψ(x)| ≤ CN,
(ψ2)∑
x∈∂+DN
∣
∣
∣ψ(x) −Ng( x
N
)∣
∣
∣
p0≤ CNd
for some C > 0 and p0 > 2.
(6.7)
These conditions roughly mean that ψ(x)/N ∼ g(x/N) at x ∈ ∂+DN .
Scaling and polilinear interpolation
The aim is to study the macroscopic behavior of the microscopic height vari-ables φ = φ(x);x ∈ DN under the Gibbs measures µψ,UN as N → ∞.The scaling connecting microscopic and macroscopic levels was introduced by(2.16) associating the macroscopic height variables hN = hN(θ); θ ∈ D withφ as step functions on D satisfying
hN( x
N
)
=1
Nφ(x), x ∈ DN . (6.8)
However, from certain technical reasons, it turns out to be more tractable todefine hN by polilinear interpolation of the macroscopic variables on 1
NDN
determined by (6.8), i.e., for general θ ∈ D, we set
hN(θ) =∑
λ∈0,1d
[
d∏
i=1
(
λiNθi+(1−λi)(1−Nθi))
]
hN( [Nθ] + λ
N
)
, (6.9)
where · denotes the fractional part, see (1.17) of [85]. In one dimension,(6.9) is just the usual polygonal approximation of hN(x/N), see (6.20).
LDP result
Now we are in the position to state the LDP result. Define H1g (D) = h ∈
H1(D);h − g∣
∣
D∈ H1
0 (D) for g ∈ C∞(Rd), where H10 (D) stands for the

62 T. Funaki
Sobolev space on D determined from the 0-boundary condition. The functiong∣
∣
∂Dserves for the macroscopic boundary condition as in (6.7).
Theorem 6.1 ([85], [156]) The family of random surfaces hN(θ); θ ∈ Ddistributed under µψ,UN satisfies the LDP on the space L2(D) with speed Nd
and the rate functional IUD(h), that is, for every closed set C and open set Oof L2(D) we have that
lim supN→∞
1
Ndlog µψ,UN (hN ∈ C) ≤ − inf
h∈CIUD(h), (6.10)
lim infN→∞
1
Ndlog µψ,UN (hN ∈ O) ≥ − inf
h∈OIUD(h). (6.11)
The functional IUD(h) is given by
IUD(h) =
ΣUD(h) − inf
H1g (D)
ΣUD if h ∈ H1
g (D),
+∞ otherwise,
where infH1g (D)
ΣUD = infΣU
D(h);h ∈ H1g (D) and
ΣUD(h) =
∫
D
σ(∇h(θ)) dθ −A
∫
D
Q(θ)1(h(θ) ≤ 0)dθ. (6.12)
The first term in the right hand side is ΣD(h) defined by (6.2) for h ∈ H1(D).
The unnormalized rate functional ΣUD(h) is lower semicontinuous on
L2(D).
Remark 6.1 Consider the case where ψ ≡ 0 (i.e., g ≡ 0) and U ≡ 0. Thenthe LDP rate functional is given by ΣD(h). Since the surface tension σ(u)attains its minimal value 0 at u = 0, the minimizer is h ≡ 0. In fact, sincePoincare’s inequality for h ∈ H1
0 (D) and then (5.10) with u = 0 imply
‖h‖2L2(D) ≤ C‖∇h‖2
L2(D) ≤2C
c−ΣD(h),
taking C = h ∈ L2(D); ‖h‖L2(D) ≥ a, a > 0 in (6.10), we obtain
µ0,0N (‖hN‖L2(D) ≥ a) ≤ e
−a2c−2C −ε Nd
for every ε > 0 and sufficiently large N . This means that the macroscopicinterface is flat with high probability and tilted surface appears with very smallprobability.
Remark 6.2 Since ∂D is piecewise Lipschitz and g∣
∣
D∈ C∞(D), by The-
orems 8.7 and 8.9 of [292], there exists a continuous linear trace operator
T0 : H1(D) → H12 (∂D) such that T0u = u
∣
∣
∂Dfor every u ∈ C∞(D) and it
holds that H1g (D) = h ∈ H1(D);T0h = g
∣
∣
∂D.

Stochastic Interface Models 63
Remark 6.3 The Gaussian case with 0-boundary condition was studied by[17] regarding hN ∈ Lp(D), 2 ≤ p < 2d/(d − 2) when D = (0, 1)d. For thegeneral Dirichlet boundary condition, the mean of the Gaussian field is shiftedby a harmonic function and therefore one can easily establish the LDP applyingthe contraction principle, see the proof of Lemma 6.6 below.
Remark 6.4 Sheffield [265] improved the topology for the LDP using Orlicz-Sobolev spaces. In addition, he discussed the LDP jointly for macroscopicheight variables and empirical measures (cf. Sect. 6.6).
Remark 6.5 If Q ≡ 1 and U is given by U(θ, r) = W (r), then it holds that
−A = − lim`→∞
1
|Λ`|log
Z0,UΛ`
Z0Λ`
. (6.13)
The right hand side represents the difference of the free energies of the inter-face in two cases with and without self potential, see Sect. 6.5. In this sense,ΣUD(h) above represents macroscopic total surface energy of the profile h.
Problem 6.1 It might be interesting to study the LDP under more generalsituation that two media filling the spaces above and below the hyperplane DN
have different interaction potentials. Namely, consider three potential func-tions V+(η), V−(η) and V+,−(r+, r−) and replace V (φ(x)−φ(y)) in the Hamil-tonian with
V (φ(x), φ(y)) =
V+(φ(x) − φ(y)) for φ(x), φ(y) > 0,
V−(φ(x) − φ(y)) for φ(x), φ(y) < 0,
V+,−(φ(x), φ(y)) for φ(x) ≥ 0, φ(y) ≤ 0,
V+,−(φ(y), φ(x)) for φ(x) ≤ 0, φ(y) ≥ 0.
One can expect, if the effect of V+,− is negligible under the macroscopic limit,that the LDP holds with unnormalized rate functional
ΣU,±D (h) =
∫
D
[σ+(∇h(θ))1(h(θ) > 0) + σ−(∇h(θ))1(h(θ) < 0)] dθ
− A
∫
D
Q(θ)1(h(θ) ≤ 0) dθ,
where σ±(u) are normalized surface tensions determined from V±, respectively.
The LDP result of Deuschel et al. [85] is a special case of Theorem 6.1:ψ ≡ 0 and U ≡ 0 so that A = 0. However, the actual proof of Theorem6.1 is given in a converse way. We reduce it to the case of U ≡ 0, sincethe potential U is weak and can be treated as a rather simple perturbation.The main effort in [156] was therefore made for the treatment of the generalboundary conditions. By a simple shift the problem can be reduced to the0-boundary case, however with bond-depending interaction potentials. The

64 T. Funaki
proof of Theorem 6.1 will be outlined in Sect. 6.5. Instead, a complete proofwill be given for one dimensional system with quadratic potentials in Sect.6.3. In one dimension, one can prove the LDP under uniform topology ratherthan the L2-topology.
6.2 Concentration properties
We can deduce from Theorem 6.1 the LLNs for hN distributed under µψ,UN(i.e., ϕ-Gibbs measure) or under its conditional probability (i.e., canonical ϕ-Gibbs measure) as N → ∞ and the limits h = h(θ); θ ∈ D are characterizedby certain variational principles.
Wulff shape
The macroscopic shape of the droplet put on a hard wall and having a definitevolume v(> 0) can be determined by the LLN for a conditioned field of hN =hN(θ); θ ∈ D. The conditions are introduced in such a manner that hN ≥ 0(wall condition; wall is put at the height level h ≡ 0) and
∫
D hN (θ)dθ ≥ v (or
= v, constant volume condition).
Corollary 6.2 (Wall and constant volume conditions) For every v ≥ 0, un-der the conditional probability µ+
N,v = µ0,0N
(
·∣
∣hN ≥ 0,∫
DhN (θ)dθ ≥ v
)
(notethat we take ψ ≡ 0, U ≡ 0), the LLN
limN→∞
µ+N,v(‖hN − h∗v‖L2(D) > δ) = 0,
holds for every δ > 0, where h∗v is the unique minimizer called Wulff shapeof the variational problem
min
ΣD(h);h ∈ H10 (D), h ≥ 0,
∫
D
h(θ)dθ = v
. (6.14)
Proof. We first notice that, if d ≥ 2,
µ0,0N (Ω+(DN )) ≥ e−CN
d−1
(6.15)
for some C > 0, where Ω+(DN ) = φ ∈ RDN ;φ(x) ≥ 0 for every x ∈ DN,
see [84] and Theorem 7.2 (entropic repulsion). This bound claims that theprobability µ0,0
N (Ω+(DN )) is large enough compared with the LDP estimate
(at the order of e−CNd
). Setting the volume condition
Av =
φ ∈ RDN ;
∫
D
hN (θ) dθ ≥ v
,
we have that

Stochastic Interface Models 65
µ+N,v(‖hN − hD,v‖L2(D) > δ)
=µN (‖hN − hD,v‖L2(D) > δ,Ω+(DN ) ∩ Av)
µN (Ω+(DN ) ∩ Av)
≤ µN (‖hN − hD,v‖L2(D) > δ,Av)
µN (Ω+(DN ))µN (Av).
The last inequality is a consequence of the FKG inequality for the denomina-tor. However, Theorem 6.1 implies
lim supN→∞
1
NdlogµN (‖hN − hD,v‖L2(D) > δ,Av) < −Σ∗
v ,
lim infN→∞
1
Ndlog
µN (Ω+(DN ))µN (Av)
≥ −Σ∗v ,
where
Σ∗v := inf
ΣD(h); h ∈ H10 (D), h ≥ 0,
∫
D
h(θ) dθ = v
.
We have applied (6.15) for the second, and these two estimates prove theconclusion. ut
Remark 6.6 Bolthausen and Ioffe [37] proved the LLN for the Gibbs measureon the wall with δ-pinning and quadratic potential under the constant volumecondition in two dimension (i.e., for interfaces in 2 + 1 dimensional space).The limit called Winterbottom shape is uniquely (except translation) char-acterized by a certain variational problem, see Sect. 7.3.
The Euler equation for the minimizer hD,v of the variational problem(6.14) has the form of the following elliptic PDE:
div
(∇σ)(∇hD,v(θ))
= −cD,v, θ ∈ D,
hD,v(θ) = 0, θ ∈ ∂D,(6.16)
where cD,v is an appropriate constant. Indeed, the minimizer h satisfies
d
dεΣD(h+ εg)
∣
∣
∣
∣
ε=0
= 0
for all g such that∫
D g(θ) dθ = 0. This implies that
∫
D
∇σ(∇h(θ)) · ∇g(θ) dθ = −∫
D
div [∇σ(∇h)] · g dθ,
and leads us to (6.16).Dobrushin and Hryniv [92] studies the fluctuation of the Wulff shape
when d = 1. They adopted the random walk model, i.e. the SOS type model φ :0, 1, . . . , N → Z in one dimension under the condition that the macroscopicvolume of φ is always constant:

66 T. Funaki
1
N
N∑
x=1
1
Nφ(x) = v, v ∈ R.
They proved, under the one-sided Dirichlet boundary condition (i.e., φ(0) = 0)or under the two-sided conditions (i.e., φ(0) = 0, φ(N) = Nb), the LLN andCLT for the macroscopic height variables hN = hN(θ); 0 ≤ θ ≤ 1 definedby the polygonal approximation of φ(x)/N:(1) LLN: hN (θ) → h(θ) (N → ∞), where h is the Wulff shape.(2) CLT (Fluctuation of hN around h):
√N(hN (θ) − h(θ)) =⇒ Gaussian process.
They did not impose the wall condition. See Higuchi et al. [182] for the ex-tension to the two dimensional lattice Widom-Rowlinson model.
Remark 6.7 For the two dimensional Ising model with nearest neighbor andferromagnetic (attractive) interactions, it is well-known that there exists thecritical temperature Tc such that if T < Tc the system has the positive spon-taneous magnetization m∗ = m∗(T ) > 0. Let µN,m be the canonical Gibbsmeasure for such Ising model on [−N,N ]2 ∩ Z
2 with + boundary condition,which is obtained by conditioning the finite Gibbs measure in a way that thesample average of the spins is m for some |m| < m∗. Dobrushin, Koteckyand Shlosman [93] proved under µN,m the macroscopic region occupied by −spins converges to the Wulff shape, except translations, as N → ∞. After-ward, Ioffe [185], [186], Ioffe and Schonmann [187] extended this result for allT < Tc applying the method of percolation.
Pisztora [252] invented the so-called L1-theory on the local sample aver-ages of the spins. This method is applicable to three dimension and higher,and uses the idea based on the renormalization group called Pisztora’s coarsegraining, see also Cerf and Pisztora [59]. The review paper by Bodineau, Ioffeand Velenik [29] is recommended to catch the whole picture of the results onthe Ising model, including the derivation of the Winterbottom shape, see Sect.7.3. See [1] for results by the middle of 1980s.
Cerf and Pisztora [60] studied the LDP under phase coexistence for Ising,Potts and random cluster models in dimensions d ≥ 3 for T < Tc. See also[58], [6].
Remark 6.8 Cohn et al. [66] considered the SOS type model on Z2 (i.e., φ :
Z2 → Z) induced from the domino tiling with equal probabilities for all possible
tilings, and proved the LLN and LDP for the corresponding macroscopic heightvariables. See also Kenyon [198].
Remark 6.9 The Wulff construction at zero temperature, but for a widerclass of Gibbs models, was studied by Descombes and Pechersky [81].

Stochastic Interface Models 67
Alt-Caffarelli’s variational problems
The upper bound (6.10) in Theorem 6.1 implies the LLN for hN distributed
under µψ,UN .
Corollary 6.3 If ΣUD has a unique minimizer h in H1
g (D), then the LLN
holds under µψ,UN , namely,
limN→∞
µψ,UN (‖hN − h‖L2(D) > δ) = 0,
for every δ > 0.
The variational problems for minimizing ΣUD were thoroughly studied by
Alt and Caffarelli [10] for non-negative macroscopic boundary data g (onephase problem) with A > 0 and by Alt, Caffarelli and Friedman [11] forgeneral g (two phases problem) especially when σ is quadratic: σ(u) = |u|2,and by Weiss [290] for more general σ. The minimizer h = h of ΣU
D generatesthe free boundaries inside D. If the surface tension σ = σ(u) is smoothenough (i.e., σ ∈ C2,γ(Rd), γ > 0) and if the free boundary ∂h > 0 of theminimizer h is locally C2, then h satisfies the Euler equation
div ∇σ(∇h) = 0
in D \ ∂h > 0 and the condition
Ψ(∇h+) − Ψ(∇h−) = AQ
on the free boundary D ∩ ∂h > 0, where Ψ(u) = u · ∇σ(u) − σ(u). TheLipschitz continuity of the minimizer h and the regularity of its free bound-ary were studied by the papers listed above and others. In our case, for theregularity of the surface tension, σ ∈ C1,1(Rd) is only known in general, recallTheorem 5.3-(1).
6.3 LDP with weak self potentials in one dimension
In this section we reformulate Theorem 6.1 in one dimension (i.e., we considerinterfaces in 1+1 dimensional space) and give a complete proof of the theorem.As we have already noticed, in one dimension, one can argue under a strongertopology determined by the uniform norm.
Reformulation of the results
Let us take D = (0, 1) ⊂ R so that DN = 1, 2, . . . , N − 1 and ∂+DN =0, N. For simplicity, we consider the case of quadratic potential V (η) = 1
2η2
with Q ≡ 1 in the self potential U(θ, r). The corresponding Gibbs measurefor the height variables φ = φ(x);x ∈ DN is then defined by

68 T. Funaki
µa,b,WN (dφ) =1
Za,b,WN
exp
−Ha,b,WN (φ)
dφDN , (6.17)
under the boundary conditions
ψ(0) = aN, ψ(N) = bN (6.18)
for some a, b ∈ R. The corresponding macroscopic boundary conditions areg(0) = a and g(1) = b at ∂D = 0, 1, recall (6.7)-(ψ2). The Hamiltonian
Ha,b,WN is given by
Ha,b,WN (φ) =
1
2
N−1∑
x=0
(φ(x + 1) − φ(x))2 +N−1∑
x=1
W (φ(x)), (6.19)
and Za,b,WN is the normalization. The formulas (6.17) and (6.19) correspondto (6.4) and (6.3), respectively. The function W satisfies the condition (W) in(6.5).
The macroscopic height variable hN = hN(θ); θ ∈ [0, 1] is defined fromφ by the interpolation (6.9) which is, in one dimension, the polygonal approx-imation of hN(x/N) = φ(x)/N ;x ∈ DN:
hN (θ) =(
θ − x
N
)
φ(x + 1) +
(
x+ 1
N− θ
)
φ(x),x
N≤ θ ≤ x+ 1
N. (6.20)
Introduce two function spaces
Ca,b = h ∈ C([0, 1]; R);h(0) = a, h(1) = b,H1a,b = h ∈ Ca,b;h is absolutely continuous
and its derivative h′ ∈ L2([0, 1]).
The space Ca,b is endowed with the topology determined by the uniform-norm‖ · ‖∞. The function hN belongs to Ca,b. Since the normalized surface tensionis σ(u) = 1
2u2 for V (η) = 1
2η2 (recall Proposition 5.2 and Example 5.1), the
total surface tension of h ∈ Ca,b defined by the formula (6.2) has the form
Σ(h) ≡ Σ(0,1)(h) =1
2
∫ 1
0
(h′)2(θ) dθ
for h ∈ H1a,b and Σ(0,1)(h) = +∞, otherwise. We set
ΣW (h) ≡ ΣW(0,1)(h) = Σ(h) −A|h ≤ 0|, (6.21)
where | · | stands for the Lebesgue measure and h ≤ 0 = θ ∈ [0, 1];h(θ) ≤0. Note that ΣW corresponds to ΣU
D defined by (6.12). It is lower semicon-tinuous in h ∈ Ca,b and good in the sense that h ∈ Ca,b;Σ
W (h) ≤ ` iscompact in Ca,b for each ` ∈ R.

Stochastic Interface Models 69
Theorem 6.4 Under µa,b,WN , the family of the macroscopic height variableshN defined by (6.20) satisfies the LDP on the space Ca,b with speed N and theunnormalized rate functional ΣW , that is, for every closed set C and open setO of Ca,b we have that
lim supN→∞
1
Nlogµa,b,WN (hN ∈ C) ≤ − inf
h∈CIW (h), (6.22)
lim infN→∞
1
Nlogµa,b,WN (hN ∈ O) ≥ − inf
h∈OIW (h), (6.23)
where IW (h) = ΣW (h) − infH1a,b
ΣW is the normalized functional of ΣW .
Concentrations
Before giving the proof of Theorem 6.4, we reformulate Corollary 6.3 in onedimensional setting and study the minimizers of the functional ΣW , whichexhibit different aspects depending on the boundary conditions a and b.
Corollary 6.5 If ΣW has a unique minimizer h in H1a,b, then the LLN holds
under µa,b,WN , namely,
limN→∞
µa,b,WN
(
‖hN − h‖∞ > δ)
= 0,
for every δ > 0.
This result is related to those obtained by Pfister and Velenik [250]. Theyconsidered the two dimensional Ising model at low temperature on a large boxwith attractive wall set at the bottom line. This line segment corresponds toour hyperplane DN , although it has an effect of hard wall at the same time,since the interfaces separating ±-phases can not go down beyond the bottomline in their setting. One of the motivations of [250] was to understand theso-called wetting or pinning/depinning transition, which will be discussed inSect. 7.3 for the ∇ϕ interface model.
Minimizers of ΣW
The functional ΣW is essentially the same as W (C) defined by (4.1) in [250],which is derived from the 2-D Ising model; note that h(θ) ≥ 0 in their case.The minimizer of W (C) was studied in Proposition 4.1 of [250].
Case 1. a, b > 0: The straight line h(1) connecting (0, a) and (1, b), i.e.,
h(1)(θ) = (1 − θ)a+ bθ, θ ∈ [0, 1]
is a critical point of ΣW ; see Fig. 3. In fact, ΣW (h) = Σ(h) for h alwaysstaying in the positive side h > 0 and, for such h, the Euler equationδΣW /δh(θ) = −h′′(θ) = 0 means that h is a linear function.

70 T. Funaki
Since the second term of ΣW in (6.21) makes it smaller if h stays longerin the nonpositive side h ≤ 0, there is another candidate for minimizers.Let h(2) be the curve composed of three straight line segments connectingfour points (0, a), P1(θ1, 0), P2(1 − θ2, 0) and (1, b) in this order; see Fig. 4.The angles at two corners P1 and P2 are both equal to α ∈ [0, π/2], which isdetermined by the Young’s relation:
tanα =√
2A. (6.24)
Then, h(2) is a critical point of ΣW . Indeed, as we have explained above, ifthe curve is straight in the positive side h > 0, the energy is smaller. Onceh reaches the side h ≤ 0, the energy is minimal if it stays on h = 0, sinceit is a straight line and gives no contribution to Σ(h). To derive the anglerelation (6.24), set
ΣW (h(2)) ≡ F (θ1, θ2) =a2
2θ1−A(1 − θ1 − θ2) +
b2
2θ2.
Then, ∂F/∂θ1 = ∂F/∂θ2 = 0 shows
a
θ1=
b
θ2=
√2A, (6.25)
which implies (6.24). The condition (6.24) is the same as [55] discussed.
0 1
a
b
Fig. 3. The function h(1).
0 1
a
b
P1 P2
Fig. 4. The function h(2).
Since h(2)(θ) is described as
h(2)(θ) = (a−√
2Aθ)1θ≤θ1 + (b−√
2A(1 − θ))1θ≥1−θ2
with θ1 and θ2 defined by (6.25), h ≡ h(2) satisfies an equation

Stochastic Interface Models 71
h′′ = ν, ν =√
2A∑
θ∈∂θ;h(θ)=0
δθ,
in the sense of generalized functions, namely,
〈h, J ′′〉 =√
2A(J(θ1) + J(1 − θ2))
for every J ∈ C∞0 ((0, 1)).
Case 2. a > 0, b < 0: Let h(3) be the curve composed of two straight linesegments connecting three points (0, a), P (θ1, 0) and (1, b) in this order; seeFig. 5. The angles at the corner P of the first and second segments to thehorizontal line are denoted by α and β ∈ [0, π/2], respectively, and obey therelation
tan2 α− tan2 β = 2A. (6.26)
These two angles depend on the boundary conditions in such a way that
a
tanα− b
tanβ= 1.
Then, h(3) is a critical point of ΣW . Indeed, the critical curve has to bestraight both in the positive and nonpositive sides. The relation (6.26) isderived similarly to Case 1: Set
ΣW (h(3)) ≡ F (θ1) =a2
2θ1−A(1 − θ1) +
b2
2(1 − θ1)
and F ′(θ1) = 0 implies (6.26). The function h ≡ h(3) satisfies an equation
h′′ = ν, ν = (tanα− tanβ)δθ1 ,
in the sense of generalized functions.Case 3. a, b < 0: The minimizer of ΣW is the straight line connecting
(0, a) and (1, b).
Problem 6.2 (Critical case) In Case 1, if the boundary conditions a, b >0 are properly chosen, one can simultaneously make both h(1) and h(2) theminimizers of ΣW . Under such situation, determine the probability for eachh(i), i = 1, 2 appearing in the limit under µa,b,WN . More precise estimate thanLDP is needed.
Proof of Theorem 6.4
Now let us give the proof of Theorem 6.4. We prepare three lemmas, first ofwhich discusses the LDP for the finite volume Gibbs measure µa,b,0N definedby (6.17) taking W ≡ 0 in the Hamiltonian.
Lemma 6.6 Under µa,b,0N , the family of surfaces hN satisfies the LDP onCa,b with speed N and the rate functional Σa,b,0(h) = Σ(h) − (b− a)2/2.

72 T. Funaki
0
1
a
b
P
Fig. 5. The function h(3).
Proof. Let w = w(x);x ∈ [0, N ] be the one dimensional standard Brownianmotion starting at 0 and set hN(θ) = w(Nθ)/N, θ ∈ [0, 1]. Then, by Schilder’stheorem (see, e.g., Theorem 5.1 of [286]; Mogul’skii [231] discusses the randomwalk with general transition probabilities), the LDP holds for hN on C0 =C([0, 1],R)∩ h(0) = 0 with the rate functional Σ(h). Define φ = φ(x);x ∈[0, N ] from w as φ(x) = w(x) − xw(N)/N + (N − x)a + xb. Then, φ is
the pinned Brownian motion satisfying (6.18) and φ(x);x ∈ DN is µa,b,0N -
distributed; see Proposition 2.2. Set hN (θ) = φ(Nθ)/N, θ ∈ [0, 1], and considera mapping Φ : h ∈ C0 7→ h ∈ Ca,b defined by
Φ(h)(θ) = h(θ) − θh(1) + (1 − θ)a+ θb.
Then, Φ is continuous and hN = Φ(hN ) holds. Therefore, by the con-traction principle, the LDP holds for hN with the rate functional Σ(h) =inf h∈C0:Φ(h)=hΣ(h), which coincides with Σa,b,0(h).
The proof of lemma is completed by showing a super exponential estimatefor the difference between hN and hN as in p.17 of [286]: For every δ > 0,
P(
‖hN − hN‖∞ ≥ δ)
≤N−1∑
x=0
P
(
supθ∈[x/N,(x+1)/N ]
∣
∣
∣
(
θ − x
N
)
w(x + 1)
+
(
x+ 1
N− θ
)
w(x) − 1
Nw(Nθ)
∣
∣
∣
∣
≥ δ
)
= NP
(
supθ∈[0,1]
|w(θ) − θw(1)| ≥ Nδ
)
≤ 4NP (|w(1)| ≥ Nδ/2)
= exp
[
−N2δ2
8+ o(N2)
]
,

Stochastic Interface Models 73
as N → ∞. ut
For g ∈ Ca,b and δ > 0, set B∞(g, δ) = h ∈ Ca,b; ‖h − g‖∞ < δ. The
next lemma estimates the second term in the Hamiltonian Ha,b,WN in (6.19).
Lemma 6.7 Let g ∈ Ca,b and 0 < δ < 1 be fixed. If hN ∈ B∞(g, δ) for Nlarge enough, then there exists some constant C > 0 such that
−AN |g ≤ 3δ| − CNδ ≤∑
x∈DNW (φ(x)) ≤ −AN |g ≤ −3δ| + CNδ,
for every N large enough.
Proof. The condition (6.5)-(W) on W is needed. In fact, the upper bound isshown as
∑
x∈DNW (φ(x)) ≤
∑
x∈DN :g(x/N)≤−2δ
W (φ(x))
≤ (−A+ δ) · ]x ∈ DN : g(x/N) ≤ −2δ≤ −AN |g ≤ −3δ| + CNδ,
for every sufficiently large N . Here, the first inequality follows from W ≤ 0,the second one is because, if hN ∈ B∞(g, δ), φ(x) = NhN (x/N) ≤ −Nδ sothat W (φ(x)) → −A as N → ∞ uniformly in x ∈ DN in the sum, and thethird one is by the uniform continuity of g. The lower bound is similar:
∑
x∈DNW (φ(x)) ≥
∑
x∈DN :g(x/N)>2δ
W (φ(x)) −A · ]x ∈ DN : g(x/N) ≤ 2δ
≥ −CNδ −AN |g ≤ 3δ|,
where the first inequality is from W ≥ −A and the second one is because, ifhN ∈ B∞(g, δ), φ(x) ≥ Nδ so that W (φ(x)) → 0 as N → ∞ uniformly inx ∈ DN : g(x/N) > 2δ. ut
Let ΣW− be the functional ΣW with |h ≤ 0| replaced by |h < 0|, i.e.,
ΣW− (h) = Σ(h) −A|h < 0|. (6.27)
Lemma 6.8 For every open set O of Ca,b, we have that
infh∈O
ΣW (h) = infh∈O
ΣW− (h).
Proof. Since ΣW (h) ≤ ΣW− (h) is obvious for every h ∈ Ca,b, the conclusion
follows once we can show that
infh∈O
ΣW (h) ≥ infh∈O
ΣW− (h). (6.28)

74 T. Funaki
To this end, for every ε > 0, take h ∈ O(∩H1a,b) such that ΣW (h) ≤ infO ΣW+
ε. We approximate such h by a sequence hnn≥1 defined by hn(θ) = h(θ) −fn(θ), where fn ∈ C∞
0 ((0, 1)) are functions such that fn(θ) ≡ 1n for θ ∈
[ 1n , 1 − 1
n ] and |(fn)′(θ)| ≤ 2 for every θ ∈ (0, 1n ) ∪ (1 − 1
n , 1); note thathn ∈ H1
a,b. Then, since limn→∞Σ(hn) = Σ(h) and
−|hn < 0| ≤ −|h ≤ 0| + 2
n,
we obtain that lim supn→∞ΣW− (hn) ≤ ΣW (h). However, O is an open set of
Ca,b, so that hn ∈ O for n large enough and thus (6.28) is shown. ut
Proof (Theorem 6.4). Let Σa,b,W and Σa,b,W− be the functionals ΣW and ΣW
−defined by (6.21) and (6.27) with Σ replaced by Σa,b,0, respectively.
Step 1 (Lower bound). Let g ∈ Ca,b and 0 < δ < 1 be given. Then, by the
upper bound in Lemma 6.7 and the LD lower bound for µa,b,0N (Lemma 6.6),we have
lim infN→∞
1
Nlog
[
Za,b,WN
Za,b,0N
µa,b,WN
(
hN ∈ B∞(g, δ))
]
≥ lim infN→∞
1
Nlog[
exp (AN |g ≤ −3δ| − CNδ) · µa,b,0N
(
hN ∈ B∞(g, δ))
]
≥ A|g ≤ −3δ| − Cδ − infh∈B∞(g,δ)
Σa,b,0(h).
Now, suppose that an open set O of Ca,b is given. Then, for every h ∈ O andδ > 0 such that B∞(h, δ) ⊂ O, we have that
lim infN→∞
1
Nlog
[
Za,b,WN
Za,b,0N
µa,b,WN
(
hN ∈ O)
]
≥ −Σa,b,0(h) +A|h ≤ −3δ| − Cδ.
Letting δ ↓ 0, since h ∈ O is arbitrary, we have
lim infN→∞
1
Nlog
[
Za,b,WN
Za,b,0N
µa,b,WN
(
hN ∈ O)
]
≥ − infh∈O
Σa,b,W− (h). (6.29)
However, by Lemma 6.8, Σa,b,W− (h) can be replaced by Σa,b,W (h) in the right
hand side of (6.29).Step 2 (Upper bound). Similarly, by the lower bound in Lemma 6.7 and
the LD upper bound for µa,b,0N (Lemma 6.6), we have
lim supN→∞
1
Nlog
[
Za,b,WN
Za,b,0N
µa,b,WN
(
hN ∈ B∞(g, δ))
]
≤ lim supN→∞
1
Nlog[
exp (AN |g ≤ 3δ| + CNδ) · µa,b,0N
(
hN ∈ B∞(g, δ))
]
≤ A|g ≤ 3δ|+ Cδ − infh∈B∞(g,δ)
Σa,b,0(h),

Stochastic Interface Models 75
where B∞(g, δ) = h ∈ Ca,b; ‖h− g‖ ≤ δ is the closure of B∞(g, δ) in Ca,b.Then, by using the lower semicontinuity of Σa,b,0(h) and the right-continuityof |g ≤ 3δ| in δ, we see that for every g ∈ Ca,b and ε > 0, there exists δ > 0such that
lim supN→∞
1
Nlog
[
Za,b,WN
Za,b,0N
µa,b,WN
(
hN ∈ B∞(g, δ))
]
≤ −Σa,b,W (g) + ε.
Therefore, the standard argument in the theory of LDP ([80], [86], [286]) yieldsthe upper bound
lim supN→∞
1
Nlog
[
Za,b,WN
Za,b,0N
µa,b,WN
(
hN ∈ C)
]
≤ − infh∈C
Σa,b,W (h) (6.30)
for every compact set C of Ca,b. However, since W is bounded, the exponential
tightness for µa,b,0N implies that for µa,b,WN : For every M > 0, there exists acompact set K ⊂ Ca,b such that
lim supN→∞
1
Nlogµa,b,WN (Kc) ≤ −M.
Thus, (6.30) holds for every closed set C of Ca,b.Taking O = C = Ca,b in (6.29) and (6.30), we see that
limN→∞
1
Nlog
Za,b,WN
Za,b,0N
= − infh∈Ca,b
Σa,b,W (h)
and this concludes the proof of the theorem. ut
6.4 LDP for δ-pinning in one dimension
Gibbs measures with pinning potentials
Let us go back to the d dimensional setting in Sect. 6.1. The pinning is aneffect of weak force which attracts interfaces φ toward the level of height 0,i.e., to a neighborhood of the hyperplane DN . Such effect is again realizedby adding self potentials U to the original Hamiltonian. We assume Q ≡ 1so that U(θ, r) = W (r) and denote the finite volume ϕ-Gibbs measure µψ,UNintroduced in (6.4) by µψ,WN . Specifically, we consider the following two typesof pinning potentials.
Square-well pinning: The potential W has a form
W (r) = −b1|r|≤a, r ∈ R (6.31)
with a, b > 0. The constant s = 2a(eb−1) is called the strength of pinning.As s increases, the effect of pinning becomes stronger.

76 T. Funaki
δ-pinning: Under the limit a ↓ 0, b → ∞ keeping s = eJ constant forJ ∈ R, we have that
eb1|φ(x)|≤adφ(x) =⇒ eJδ0(dφ(x)) + dφ(x)
for each x ∈ DN . In this way, the finite volume Gibbs measure with δ-pinning is introduced as a weak limit of the Gibbs measure µψ,WN withsquare-well pinning and has the following form
µψ,JN (dφ) =1
Zψ,JN
exp
−HψN(φ)
∏
x∈DN(eJδ0(dφ(x)) + dφ(x)). (6.32)
We regard µψ,JN ∈ P(RDN ) by considering φ(x) = ψ(x) for x ∈ ∂+DN asbefore. The larger J gives stronger pinning. When J = −∞, there is nopinning and µψ,−∞
N coincides with µψN = µψDN defined by (2.4).
The square-well pinning potential W of (6.31) obviously does not satisfy thecondition (W) in (6.5) and the LDP is not established yet. Several proper-
ties of the Gibbs measures µψ,WN , µψ,JN with square-well or δ-pinnings will bediscussed in the subsequent section, Sect. 7.2.
LDP result
The LDP is established for δ-pinning in one dimension with quadratic poten-tial V (η) = 1
2η2. Let us take D = (0, 1) ⊂ R so that DN = 1, 2, . . . , N − 1,
and consider the Gibbs measure µψ,JN under the boundary conditions (6.18):
ψ(0) = aN, ψ(N) = bN for a, b ∈ R. We denote µψ,JN , Zψ,JN and ZψN (= Zψ,−∞N )
as µa,b,JN , Za,b,JN and Za,bN , respectively.
Theorem 6.9 (Funaki and Sakagawa [156]) Under µa,b,JN , the family ofmacroscopic random surfaces hN(θ); θ ∈ [0, 1] defined by (6.20) satisfiesthe LDP on Ca,b with speed N and the rate functional IJ (h) ≡ IJ(0,1)(h) =
ΣJ(h) − infH1a,b
ΣJ (if h ∈ H1a,b and = +∞ otherwise), where
ΣJ(h) ≡ ΣJ(0,1)(h) = Σ(0,1)(h) + τpin(J)|h = 0|,
and
τpin(J) = − limN→∞
1
Nlog
Z0,0,JN
Z0,0N
. (6.33)
The function τpin(J) is called the pinning free energy. It is known thatthe limit exists and τpin(J) < 0 for every J ∈ R, see [156].

Stochastic Interface Models 77
Minimizers of ΣJ
The minimizers of ΣJ are computable in a similar manner to what we didin Sect. 6.3 for ΣW . For instance, in the case where a > 0 and b < 0, theminimizer is either the straight line h(4) connecting (0, a) and (1, b) or thecurve h(5) composed of three straight line segments connecting four points(0, a), P1(θ1, 0), P2(1− θ2, 0) and (1, b) in this order; see Figs. 6 and 7, respec-tively. If h(5) is realized, the angles at two corners P1 and P2 are both equalto α ∈ [0, π/2] and obey the Young’s relation:
tanα =√
−2τpin(J).
0 1
a
b
Fig. 6. The function h(4).
0 1
a
P1 P2
b
Fig. 7. The function h(5).
6.5 Outline of the proof of Theorem 6.1
6.6 Critical LDP
Bolthausen and Deuschel [33] discussed the LDP for the empirical measuresof the ϕ-field distributed under the Gaussian ϕ-Gibbs measure on Z
d, whend ≥ 3. Here we summarize their results.
Let µ(≡ µ0) ∈ P(RZd
) be the Gaussian measure on RZd
with mean 0and covariance (−∆)−1(x, y), x, y ∈ Z
d. Define the empirical distributionfunctional of ϕ-field by
RN (φ) :=1
Nd
∑
x∈DNδτxφN ∈ Ps(RZ
d
), (6.34)
for φ = φ(x);x ∈ Zd ∈ R
Zd
, where DN ≡ ND ∩ Zd = [0, N − 1]d ∩ Z
d
with the choice of D = [0, 1)d. Note that Nd = |DN |. In (6.34), φN is the

78 T. Funaki
periodic extension to Zd of φ|DN = φ(x);x ∈ DN, the restriction of φ
on DN , and τx denotes the spatial shift. Ps stands for the class of all shiftinvariant probability measures. Since µ is ergodic under shifts, the LLN:
RN =⇒ µ (N → ∞)
holds for µ-a.s. φ, where =⇒ denotes the weak convergence of measures on
RZd
. The aim of [33] is to study the corresponding LDP.
First result
The first result is at the order of Nd, i.e., the weak LDP of volume order:
µ (RN ∈ “neighborhood of ν”) N→∞
e−Ndh(ν|µ) (N → ∞). (6.35)
Here the rate functional is the specific entropy (specific free energy)
h(ν|µ) := limN→∞
1
NdHN (ν|µ), ν ∈ Ps(RZ
d
)
and HN (ν|µ) :=∫
log dνdµ |FDN dν is the relative entropy defined by restrict-
ing ν and µ to the σ-field FDN = σφ(x);x ∈ DN. The asymptotic (6.35)is rudely stated, but it can be precisely formulated as the LDP upper andlower bounds as usual. The “weak” LDP means that the upper bound isavailable only for compact sets. Similar results are known for lattice systemswith bounded spins (e.g., Ising model) and for Markov processes (Donsker-Varadhan theory).
Let us denote the class of all tempered (i.e., square integrable) and shiftinvariant ϕ-Gibbs measures by G and that of all ergodic µ ∈ G by ext G,respectively; recall that we are assuming V (η) = 1
2η2. From Theorem 9.10, we
haveext G = µh;h ∈ R,
where µh ∈ P(RZd
) is the Gaussian measure with mean h and covariance(−∆)−1(x, y). It is however known that ϕ-Gibbs measure has an entropiccharacterization (cf. Sheffield for general potentials):
h(ν|µ) = 0 ⇐⇒ ν ∈ G.
In particular, the LDP estimate (6.35) gives no information when ν is theϕ-Gibbs measure, since the rate functional is 0 for such ν.
Second result
The order (speed) of the LDP for ν ∈ G is Nd−2, i.e., the LDP of capacityorder holds:

Stochastic Interface Models 79
µ (RN ∈ “neighborhood of ν”) N→∞
e−Nd−2C(ν|µ). (6.36)
The rate functional is given by
C(ν|µ) = inf
1
2ED(h); h ∈ L2(D) s.t. ν =
∫
D
µh(θ) dθ
,
where
ED(h) = inf
1
2‖∇h‖2
L2(Rd); h ∈ H1(Rd), h(θ) = h(θ) a.e. θ ∈ D
.
In particular, if ν = µh ∈ ext G, since h(θ) ≡ h, we have
C(µh|µ) = h2CapRd(D),
see (7.1) below for the definition of the capacity.
Third result
If ν is the mixture of finitely many µh’s, then h(θ) in C(µh|µ) is a stepfunction so that h(θ) ∈ H1(Rd) is never fulfilled and we have C(ν|µ) = +∞.This means that (6.36) is not at the correct order for such ν. Indeed, for suchν, the LDP with speed Nd−1, i.e., the LDP of surface order holds and wehave that
limN→∞
1
Nd−1HN (µhN |µ) <∞,
for the sequence of Gaussian fields µhN ∈ P(RDN ) on DN with mean h(x/N)and covariance (−∆)−1(x, y).

80 T. Funaki
7 Entropic repulsion, pinning and wetting transition
In this section we discuss the subjects of entropic repulsion and pinning. Theentropic repulsion is the problem to study, when a hard wall is settled atthe height level 0, how high the interfaces are pushed up by the random fluc-tuations naturally caused by the Lebesgue measure dφΛ in the Gibbs measure(2.4), in other words, by the entropic effects of the measure. The pinningis, on the other hand, the problem to study, under the effect of weak forceattracting interfaces to the height level 0, whether the field is really localizedor not. This is the energy effect. These two effects conflict with each otherand therefore, it is an interesting question to know which effect is dominantin the system. This leads us to the problem of the wetting transition.
We first briefly summarize the results. Let µN = µ0DN
be the finite volumeϕ-Gibbs measure onDN with 0-boundary conditions. The goal is to investigatethe asymptotic behavior as N → ∞ of height variables φ under µN and underµN with wall or/and pinning effects.
(a) No wall nor pinning (cf. (3.5), Theorem 4.13):d = 2 =⇒ delocalized (|φ(x)| ≈ √
logN)d ≥ 3 =⇒ localized (φ(x) = O(1))
massless (algebraic decay of two point correlations)(b) Wall effect only (Entropic repulsion, Theorem 7.3):
d = 2 =⇒ delocalized (φ(x) ≈ logN)d ≥ 3 =⇒ delocalized (φ(x) ≈ √
logN)(c) Pinning effect only (Theorems 7.4, 7.5):
d = 2 =⇒ localized and mass generation(exponential decay of two point correlations)
d ≥ 3 =⇒ localized, mass generation(d) Both wall and pinning effects (Theorem 7.7):
d = 1, 2 =⇒ wetting transition occurs, i.e., if the strength ofpinning is strong, the field is localized; while, ifit is weak, the field is delocalized.
d ≥ 3 =⇒ no wetting transition and the field is always delocalized.
7.1 Entropic repulsion
First let us remind some notation. For Λ b Zd, the finite volume ϕ-Gibbs
measure µ0Λ ∈ P(RZ
d
) is defined by (2.4) with 0-boundary condition. We shalldenote by D the class of all connected and bounded regions D of R
d withpiecewise smooth boundaries ∂D. We take D ∈ D and fix it, and simply writeµN for µ0
DNwith the choice of Λ = DN . When V (η) = 1
2c−η2, µ0
Λ and µN
are denoted by µ0,GΛ and µGN , respectively. For Λ b Z
d, consider the entropicrepulsion event defined by
Ω+(Λ) = φ;φ(x) ≥ 0 for every x ∈ Λ.

Stochastic Interface Models 81
This event is realized by putting a wall at height level 0 on the region Λ.We explain the results on the entropic repulsion following Deuschel and
Giacomin [84]. The conditions (V1)-(V3) in (2.2) are always assumed on thepotential V . The first result is for the probability estimate on the entropicrepulsion event when the wall is put at strictly inside of D: A b D meansthat A ⊂ D and dist(A,Dc) > 0. We shall write
logd(N) =
logN, d ≥ 3,(logN)2, d = 2.
See Remark 7.2 below for d = 1.
Theorem 7.1 ([84]) Assume A,D ∈ D and A b D. Then there exist 0 <C1 ≤ C2 <∞ such that
−C2 ≤ lim infN→∞
1
Nd−2 logd(N)logµN (Ω+(AN ))
≤ lim supN→∞
1
Nd−2 logd(N)logµN (Ω+(AN )) ≤ −C1.
Proof (Partially). We only outline the proof of the lower bound for the Gaus-sian case: µN = µGN (with c− = 1) when d ≥ 3. The bound can be shown withC2 = 4dG(O,O) CapD(A), where
CapD(A) = inf
1
2‖∇h‖2
L2(D); h ∈ C10 (D), h ≥ 1A
(7.1)
is the capacity; note that 12‖∇h‖2
L2(D) = ΣD(h) for the Gaussian case. In
fact, transforming the measure µGN into µG,φN under the map φ 7→ φ+ φ where
φ(x) =√a logNh(x/N) with h(θ) ≥ 1A(θ), one can show the LLN for the
transformed measure µG,φN :
limN→∞
µG,φN (Ω+(AN )) = 1, (7.2)
if a > 2dG(O,O); i.e., the probability that the interfaces touch the wall be-comes negligible if they are pushed up to the sufficiently high level by addingφ. The price to adding φ should be paid by the relative entropy which behavesas
limN→∞
1
Nd−2 logNH(µG,φN |µGN ) = a‖∇h‖2
L2(D). (7.3)
Applying the entropy inequality, (7.2) combined with (7.3) shows
1
Nd−2 logNlog
µGN (Ω+(AN ))
µG,φN (Ω+(AN ))
≥ − 1
Nd−2 logN
1
µG,φN (Ω+(AN ))
H(µG,φN |µGN ) +1
e
−→N→∞
−a‖∇h‖2L2(D).

82 T. Funaki
Thus the lower bound is obtained with C2 = 4dG(O,O) CapD(A). ut
Remark 7.1 The problem of the entropic repulsion was posed by Lebowitzand Maes [216]. They notify that the probability of Ω+,δ(AN ) = φ;φ(x) ≥δ for every x ∈ AN, δ > 0 instead of Ω+(AN ) may be estimated as follows:
µN (Ω+,δ(AN )) ≤ µN (X ≥ δ)
≈ exp
−δ2/2var (X ;µN )
≤ exp
−δ2/2var (X ;µGN )
≤ exp
−Cδ2Nd−2
,
where X = 1|AN |
∑
x∈AN φ(x). The second line is true at least if the ϕ-field
has Gaussian tail and the Brascamp-Lieb inequality proves the third line.The above calculation roughly explains the capacity order appearing in (7.4),though the logarithmic correction does not come out because of the differenceof Ω+,δ(AN ) from Ω+(AN ).
The second result is for the case where the wall is put over the wholedomain D, i.e., we take A = D.
Theorem 7.2 ([84]) Assume D ∈ D. Then there exist 0 < C1 ≤ C2 < ∞such that
−C2 ≤ lim infN→∞
1
Nd−1logµN (Ω+(DN ))
≤ lim supN→∞
1
Nd−1logµN (Ω+(DN )) ≤ −C1.
Moreover, we have that
limL→∞
lim supN→∞
1
Nd−1
∣
∣logµN (Ω+(DN )) − log µN (Ω+(∂LDN ))∣
∣ = 0,
where ∂LDN = x ∈ DN ; dist (x,DcN ) ≤ L.
Proof (Partially). In the proof of Theorem 7.1, one can take h ≡ 1 so thatφ(x) ≡ √
a logN and
limN→∞
µG,φN (Ω+(DN )) = 1
holds for a > 2dG(O,O). For the non-Gaussian case, the application of theBrascamp-Lieb inequality gives the same result for a > 2dG(O,O)/c−. ut
Theorem 7.1 claims that the probability behaves as
µN(Ω+(AN )) e−CNd−2 logd(N), (7.4)
i.e., the decay is essentially of capacity order except for the logarithmiccorrection, while Theorem 7.2 indicates that

Stochastic Interface Models 83
µN (Ω+(DN )) e−CNd−1
, (7.5)
i.e., the decay is much faster than (7.4) and it is of surface order. The behav-ior of φ(x) near the boundary of DN substantially contributes to the decayof the probability in (7.5). Indeed, since φ satisfies the boundary conditionφ(x) = 0 at x ∈ ∂+DN , φ can be negative near the boundary with highprobability and this makes µN (Ω+(DN )) smaller. If one can assume that theprobability for φ(x) getting to the positive side at each x near ∂+DN behavesas e−c and is nearly independent when x’s are apart from each other, thenwe get the order in (7.5). Once the interface comes to the positive side, theprobability to stay there is governed by (7.4) at the inside of DN , which isnegligible compared with the boundary effect (7.5).
The third result is for the estimate giving how high the interfaces arepushed up by the effect of the wall put at A = D, i.e., our object is theconditional probability
µ+N = µN (·|Ω+(DN )).
This measure was introduced in Corollary 6.2 imposing the constant volumecondition at the same time.
Theorem 7.3 ([84]) (1) (Upper bound) For every C > 2dc−G∗d,
limN→∞
infx∈DN
µ+N (φ(x) <
√
C logd(N)) = 1,
where G∗d = G(O,O) (when d ≥ 3), G∗
2 = limN→∞GDN (O,O)/ logN (whend = 2), and G and GDN are the Green functions of ∆ on Z
d and DN , respec-tively.(2) (Lower bound) There exists K > 0 such that
limN→∞
infx∈D(δ)
N
µ+N (φ(x) >
√
K logd(N)) = 1,
for every δ ∈ (0, 1), where D(δ)N = DN\∂δND and ∂aD = θ ∈ D; dist (θ,Dc) ≤
a.
Proof (Outline). We assume d ≥ 3. Note that the Brascamp-Lieb inequalityholds for µ+
N since the conditioning under Ω+(DN ) is equivalent to addingto the Hamiltonian the self potential term
∑
xW (φ(x)), where W (r) = 0for r ≥ 0 and +∞ for r < 0, and such W can be regarded convex (byapproximating it by a sequence of convex potentials). Therefore, we have
µ+N (φ(x) >
√
C logN)
≤ exp
−c−(
(√C logN −Eµ
+N [φ(x)]) ∨ 0
)2
2GDN (x, x)
.

84 T. Funaki
This proves the upper bound, if one can show
lim supN→∞
supx∈DN
Eµ+N [φ(x)]√C logN
< 1. (7.6)
To see (7.6), the method of changing the measure (as in the proof of Theorem7.1), the FKG and Brascamp-Lieb inequalities are applied. The details areomitted. The lower bound is much more delicate. The lattice is divided intoeven and odd sites, and then the Markov property of the ϕ-field is effectivelyused. ut
As Theorem 7.3 suggests, the expectation of the height variables behavesas follows at the inside (in the macroscopic sense) of DN :
Eµ+N [φ(O)] ≈
N→∞
√
logd(N), (7.7)
assuming O ∈ D for simplicity. This means that, once the wall is put on DN ,the interfaces are pushed up to the level of order O(
√
logd(N)) inside of DN .The behavior of φ(x) was given by (3.5) when there was no wall including thenon-Gaussian case. Compared with this, we see that the wall pushes up theinterfaces further at the order of
√logN for every d ≥ 2. Bolthausen et al.
[34] studied the fine behavior of maxx φ(x) for d = 2.
Remark 7.2 When d = 1, the height variables behave as |φ(x)| ≈√N under
µN , recall (3.5). As we shall see in Sect. 14, they behave as φ(x) ≈√N under
µ+N too. Namely, the wall does not change the order of the heights of the ϕ-field
in one dimension.
Much more precise results are known especially for the Gaussian ϕ-field indimensions d ≥ 3. Deuschel and Giacomin [83] proved that the distribution ofφ(x)− aN ;x ∈ Z
d under µ+N (regarding φ(x) = 0 on Dc
N ) weakly convergesas N → ∞ to the Gaussian ϕ-Gibbs measure µ ≡ µZd = N(0, G(x, y)) on
Zd, where aN := Eµ
+N [φ(O)] ∼
√
4G(O,O) logN . In other words, the wallhas an effect on the ϕ-field simply pushing it up by aN . In addition, thefollowing precise asymptotic estimates on the probabilities µZd(Ω
+(DN )) andµN (Ω+(DN )) were established by Bolthausen et al. [35] and Deuschel [82],respectively:
limN→∞
1
Nd−2 logNlog µZd(Ω
+(DN )) = −2G(O,O) Cap Rd(D), (7.8)
limN→∞
1
Nd−1logµN (Ω+(DN )) = −c, (7.9)
where c is a certain constant determined from the surface tension. The entropicrepulsion for the Gaussian ϕ-field on a (quenched) random hard wall wasdiscussed by Bertacchi and Giacomin [25], when d ≥ 3.

Stochastic Interface Models 85
Remark 7.3 (1) The entropic repulsion for the Gaussian field with covari-ance P (−∆)−1(x, y) is discussed by Sakagawa [263] for polynomials P inhigher dimensions (i.e., at the transient regime: d ≥ 3 when P (a) = a). Thephysical motivation comes from [181].(2) The probability estimate on the entropic repulsion event is, in general,more delicate in lower dimensions (i.e., at the recurrent regime). Sinai [270]considered the field φ = φ(x) ∈ Z;x ∈ Z+ with mean 0, covariance(−∆)−2(x, y) satisfying φ(0) = 0 in one dimension and proved that
C1N−1/4 ≤ P (φ(x) ≥ 0 for every 0 ≤ x ≤ N) ≤ C2N
−1/4, (7.10)
where ∆ is the discrete Laplacian on Z+ determined from the Dirichlet 0-boundary condition at x = 0. Theorem 7.1 and (7.8) show the exponentialdecay of the probability when d ≥ 3, while (7.10) exhibits the decay in power lawwhich is quite delicate. Note that φ can be constructed as φ(x) =
∑xy=0 η(y)
from the simple and symmetric random walk η(y); y ∈ Z+ on Z with timeparameter y.
7.2 Pinning
Recall that µψ,WN is the finite volume ϕ-Gibbs measure (6.4) with U(θ, r) =W (r). The square-well pinning and δ-pinning were introduced in Sect. 6.4.We first shortly summarize the known results on the pinning problem.
Dunlop et al. [102] first proved the localization of the ϕ-field underthe square-well pinning, namely the uniform boundedness in N of the ex-
pected height variables Eµ0,WN [|φ(x)|] under the ϕ-Gibbs measures µ0,W
N with
0-boundary conditions or the existence of infinite volume limit of µ0,WN as
N → ∞, if the Hamiltonian contains arbitrarily weak pinning potentials Wwhen d = 2 for quadratic V . This should be compared with the case withoutpinning (i.e., W ≡ 0) in which the localization occurs only when d ≥ 3 andalso compared with the case of strong pinning (or massive) potentials satisfy-ing lim|r|→∞W (r) = +∞ for which the localization occurs for all dimensions.The result of [102] is extended for general convex potential V by Deuscheland Velenik [88] later. In addition to the localization, the mass generation,namely the exponential decay of the correlations of the ϕ-field is shown byIoffe and Velenik [188] for d = 2 with δ-pinning, see also [101]. Further preciseestimates on the asymptotic behaviors of the mass and the degree of local-ization by means of the variances of the field as the pinning effect becomessmaller were established by Bolthausen and Velenik [38].
Let us state the results in more details. The first result is on the localiza-tion due to Deuschel and Velenik [88]. The ϕ-field is localized even withoutthe pinning if d ≥ 3. Therefore, the interesting case is in the two dimensionso that we take D = [−1, 1]2 and consider the ϕ-field on DN = [−N,N ]2 ∩Z
2
adding square-well or δ-pinnings. The next theorem gives an estimate on thedecay of the tail distribution of the height variables. This implies the localiza-tion as we shall see later. We write µa,bN for µ0,W
N with the square-well pinning

86 T. Funaki
potential W given in (6.31) and µJN for µ0,JN with δ-pinning, respectively. The
0-boundary conditions are imposed in both measures.
Theorem 7.4 ([88], Non-Gaussian tail) (1) For every a, b > 0, there existconstants C1 = C1(s), C2 = C2(s) > 0 such that
e−C1T2/ log T ≤ µa,bN (φ(x) ≥ T ) ≤ e−C2T
2/ log T , (7.11)
for every sufficiently large T > 0 and every N ∈ N, where the upper boundholds for every x ∈ DN while the lower bound holds only for x ∈ DN satisfyingdist (x, ∂DN ) ≥ d0T/ logT with some d0 > 0. Recall that s = 2a(eb−1) standsfor the strength of the pinning.(2) Letting a ↓ 0 and b→ ∞, a similar estimate holds for µJN with δ-pinning.
The upper bound implies, in particular, that the exponential moments of|φ(x)| are uniformly bounded in N under µa,bN or µJN so that these measuresare tight and admit the limits µa,b and µJ , respectively, along a proper sub-sequence N ′ → ∞. It is obvious that the limits µa,b or µJ are the ϕ-Gibbsmeasures with square-well or δ-pinnings on Z
2. The fields are thus localizedin two dimension.
Remark 7.4 (1) The lower bound in (7.11) indicates that the decay of thetail distribution of φ(x) is slower than that of the Gaussian distribution; i.e.,φ(x) can take rather large values. Without pinning, if d ≥ 3, the ϕ-field existson Z
d and the Brascamp-Lieb inequality shows its Gaussian tail: µ(φ(x) ≥T ) e−CT
2
. Therefore, with pinning, the tail distributions exhibit completelydifferent behaviors for d = 2 and d ≥ 3.(2) The estimate (7.11) holds for the Gibbs measures µa,b and µJ on Z
2 bytaking the limit N → ∞.
The second result is on the mass generation due to Ioffe and Velenik[188] for d = 2 and δ-pinning. The case of d ≥ 3 is discussed by [47].
Theorem 7.5 ([188]) For every J ∈ R, there exist constants m = m(J), C =C(J) > 0 such that
EµJN [φ(x);φ(y)] ≤ Ce−m|x−y|, x, y ∈ Z
2,
i.e., the covariances under µJN have the exponential decay estimates uniformlyin N .
In the proof of Theorems 7.4 and 7.5, the following expansions of themeasures µJN and µa,bN play the key role.
Lemma 7.6 (1) For each φ ∈ RDN (or ∈ R
Zd
regarding φ ≡ 0 on DcN ) define
the pinned region (random region) by
A ≡ AN (φ) = x ∈ DN ;φ(x) = 0. (7.12)

Stochastic Interface Models 87
Then the measure µJN admits the expansion
µJN (·) =∑
A⊂DNνJN (A)µ0
DN\A(·),
where νJN (A) := µJN (A = A) is the probability that the pinned region is A andµ0DN\A(·) is the ϕ-Gibbs measure on DN \A with 0-boundary condition.
(2) The measure µa,bN admits the similar expansion:
µa,bN (·) =∑
A⊂DNνa,bN (A)µa,bN,Ac(·),
where A = x ∈ DN ; |φ(x)| ≤ a and
νa,bN (A) = µa,bN (A = A),
µa,bN,Ac(·) = µa,bN (·|A = A).
For the proof of two theorems, using Lemma 7.6, Helffer-Sjostrand rep-resentation and Brascamp-Lieb inequality are applied, but the details areomitted.
Remark 7.5 The constant m = m(J) arising in Theorem 7.5 behaves aslimJ↓−∞m(J) = 0, since the decay of the correlation is algebraic at J = −∞.[38] studied the detailed behavior of m(J) when V (η) = c
2η2. In particular, if
d = 2, limJ↓−∞EµJN [φ(x)2] = ∞ since the field is delocalized at J = −∞.
They investigated the fine behavior of the variances as well.
7.3 Wetting transition
The problem of the wetting transition, which is studied by Pfister and Velenik[250] for the Ising model, is recently discussed for the ∇ϕ interface model aswell by several authors. The effects of the hard wall and the pinning near 0-level are introduced at the same time. The ϕ-field can take only nonnegativevalues. Recall that the field on a hard wall is delocalized for all dimensionsd (Theorem 7.3-(2)) while the pinning localizes the field (Theorem 7.4). Theformer is caused by the entropy effect and the latter is by the energy effect.
Fisher [118] proved the existence of the wetting transition, namely thequalitative change in the localization/delocalization of the field depending onwhich of these two competitive effects dominate the other, when d = 1 forthe SOS type discrete model. This result is extended by Caputo and Velenik[55] for d = 2. The precise path level behavior is discussed by Isozaki andYoshida [189] when d = 1. Bolthausen et al. [36] showed that, contrarily whend ≥ 3, no transition occurs and the field is always localized, i.e., only thephase of partial wetting appears. Bolthausen and Ioffe [37] proved the law oflarge numbers in the partial wetting phase in 2-dimension (i.e., d = 2) under

88 T. Funaki
the Gibbs measures with 0-boundary conditions, hard wall, δ-pinning andquadratic V conditioned that the macroscopic total volume of the interfacesis kept constant. They derived the so-called Winterbottom shape in thelimit and the variational problem characterizing it, c.f. Remark 6.6. The onedimensional case with general V was discussed by De Coninck et al. [71].
Let us state the results more precisely. We deal with the δ-pinning only,but the square-well pinning can be treated essentially in the same way. The
finite volume ϕ-Gibbs measure µJ,+N ∈ P(RZd
+ ) with hard wall and δ-pinningis defined by
µJ,+N (·) = µJN (·|Ω+(DN )), (7.13)
for J ∈ [−∞,∞), where R+ = [0,∞). We take V (η) = 12η
2 and consideron the region DN = [−N,N ]d ∩ Z
d determined from D = [−1, 1]d. Recall
that µJN ∈ P(RZd
) is the finite volume ϕ-Gibbs measure with δ-pinning and0-boundary condition, and Ω+(DN ) = φ;φ(x) ≥ 0 for every x ∈ DN. IfJ = −∞, there is no pinning effect so that µ−∞,+
N = µ+N .
The random region A ≡ AN (φ) defined by (7.12) is regarded as the dryregion, because the heights are 0 on A so A is the region not covered bythe matter under our consideration. One can expect that A is wide if theinterface φ is localized, while it is narrow if φ is delocalized. In this sense,the localized or delocalized states are called partial wetting or completewetting, respectively.
For instance, the materials such as gasoline or oil dropped on a flat planespread over like a film. This is the state of complete wetting. On the otherhand, a small droplet of the water does not spread over on the desk. This isthe partial wetting. The place not covered by the water is the dry region.
Existence and nonexistence of the wetting transition
Recent researches by Caputo and Velenik [55] and Bolthausen et al. [36] showthat when d = 1 and 2 the competition between entropy effect and energy ef-fect brings about the phase transition called wetting transition from completewetting to partial wetting when the parameter J increases, while when d ≥ 3the pinning effect is always dominant and only the state of partial wettingappears for every J ∈ R.
As a natural index to judge the system in which states of complete orpartial wettings, let us introduce the mean density of the dry region
ρN (J) = EµJ,+N [|AN |/|DN |] ≥ 0.
Observing that the limit of ρN (J) is 0 or positive, one can probe whether themost region is wet or the dry region substantially survives. Namely, we callthe complete wetting if
ρ(J) := limN→∞
ρN (J) = 0, (7.14)

Stochastic Interface Models 89
and the partial wetting if
ρ(J) := lim infN→∞
ρN(J) > 0. (7.15)
Lemma 7.8 below shows that ρ(J) is nondecreasing in J .The result is summarized in the next theorem. Recall that the potential is
taken as V (η) = 12η
2.
Theorem 7.7 (1) ([55]) When d = 2, the critical value Jc ∈ R exists suchthat ρ(J) = 0 (i.e., complete wetting) for J < Jc and ρ(J) > 0 (i.e., partialwetting) for J > Jc.(2) ([36]) When d ≥ 3, ρ(J) > 0 (i.e., partial wetting) for every J ∈ R.
Remark 7.6 ([55]) The wetting transition exists for the SOS model with thepotential V (η) = |η| for all dimensions d ≥ 1.
The proof of Theorem 7.7 is omitted, instead we state two simple lemmaswhich are needed for the proof of the theorem. Let ZJ,+N be the normalization
constant for µJ,+N :
ZJ,+N =
∫
RDN+
e−H0DN
(φ)∏
x∈DN
dφ(x) + eJδ0(dφ(x))
.
In particular, for J = −∞
Z−∞,+N ≡ Z+
N =
∫
RDN+
e−H0DN
(φ)∏
x∈DNdφ(x)
is the normalization constant when there is no pinning. Then we have thefollowing lemma.
Lemma 7.8 The dimension d ≥ 1 is arbitrary. We have that
d
dJlogZJ,+N = Eµ
J,+N [|AN |], (7.16)
d2
dJ2logZJ,+N = Eµ
J,+N [|AN |; |AN |]. (7.17)
Moreover, the limit
τwall(J) = − limN→∞
1
|DN | logZJ,+N
Z+N
∈ (−∞, 0] (7.18)
exists.
Proof (Outline). Use the expansion in Lemma 7.6-(1) to show (7.16) and(7.17). The existence of the limit τwall(J) is similar to that for the surfacetension, Theorem 5.1. ut

90 T. Funaki
The constant τwall(J) is called the wall free energy (or, more precisely,the wall+pinning free energy) which is expressed as the difference
τwall(J) = − limN→∞
1
|DN |logZJ,+N + lim
N→∞
1
|DN | logZ+N ,
between the surface tensions under the hard wall with and without the pin-ning.
Lemma 7.9 The dimension d ≥ 1 is arbitrary. For every large enough J ∈ R,ρ(J) > 0 (i.e., partial wetting) holds.
Proof. The identity (7.16) shows
∫ J
−∞ρN (J ′) dJ ′ =
1
|DN | logZJ,+N
Z+N
. (7.19)
Here, the replacement of the region of the integration from RDN+ into R
DN
shows Z+N ≤ Z0
DNand this implies that
lim supN→∞
1
|DN |logZ+
N ≤ limN→∞
1
|DN |logZ0
DN = −σ∗(0),
where σ∗(0) is the unnormalized surface tension at u = 0. On the other
hand, ZJ,+N can be bounded from below by the integral with respect to∏
x∈DN eJδ0(dφ(x)) so that we have
ZJ,+N ≥ eJ|DN |.
These two bounds combined with (7.19) show that
lim infN→∞
∫ J
−∞ρN (J ′) dJ ′ ≥ J + σ∗(0),
for every J ∈ R. The right hand side is positive if J is sufficiently large. Thisproves the conclusion noting that ρN(J) is nondecreasing in J . ut
When d ≥ 3, one can prove that τwall(J) < 0 for all J ∈ R; the proofis omitted. This physically means that the interfaces always feel the pinningeffect at macroscopic level. Then, similarly to the proof of Lemma 7.9, one candeduce ρ(J) > 0 from τwall(J) < 0 and this completes the proof of Theorem7.7-(2).
Remark 7.7 (1) When d = 1, Isozaki and Yoshida [189] established the limittheorem at path level for the SOS type model: φ(x) ∈ Z+. See also [36].(2) When d = 1, the wetting transition for plural interfaces of SOS type wasdiscussed by Tanemura and Yoshida [281].

Stochastic Interface Models 91
Winterbottom shape
Bolthausen and Ioffe [37], [32] add the pinning effect to the argument for thederivation of the Wulff shape in Sect. 6.2. Assuming d = 2 and V (η) = 1
2η2,
the measure µJ,+N,v is introduced from µJ,+N by conditioning on the macroscopicvolume of droplets as before:
µJ,+N,v = µJ,+N
(
·∣
∣
∣
∫
D
hN (θ)dθ ≥ v
)
.
[37] proved that, if τwall(J) < 0, the LLN holds under µJ,+N,v and the limits arethe minimizers of the functional
ΣJD(h) := ΣD(h) + τwall(J)|θ ∈ D; h(θ) = 0|
under the conditions that h ≥ 0 and∫
Dhdθ = v. The second term represents
that the interfacial energy is smaller if the dry region (i.e., the region on whichh(θ) = 0) is wider; i.e., if τwall(J) < 0, it is more favorable for the interfaceto stay on the wall because of the pinning effect. The minimizer of ΣJ
D(h) iscalled the Winterbottom shape, which is unique except the translation.
Remark 7.8 (1) De Coninck et al. [71] discussed the above problem for gen-
eral potential V when d = 1, i.e., conditioning µ+N or µJ,+N as
∑N−1x=1 φ(x) =
N2v (constant macroscopic volume condition for the interfaces), they derivedthe Wulff shape or the Winterbottom shape, respectively. They further obtainedthe Young’s relation for the angle of the interface to the wall at the point ittouches the wall.(2) De Coninck et al. [72] discussed the generalization of Young’s law for SOStype interfaces on a substrate which is heterogeneous, rough and realized asanother SOS interface.
Remark 7.9 The wetting transition and the derivation of the Winterbottomshape from the two dimensional Ising model were studied by Pfister and Ve-lenik [250]. They impose the + spins on the upper half of the boundary ofthe cube with size N and − spins on the lower half. Moreover, at the lowersegment of the boundary of the cube, magnetic field is added and this gives thepinning effect. Changing the strength of the magnetic field, the phase separa-tion curve prefers to stay on the lower boundary of the cube. Three and higherdimensional Ising model was investigated by Bodineau, Ioffe and Velenik [30].
Remark 7.10 We refer to [217], [218], [224], [225] by Lipowsky et al. forphysical motivations to the problem of the wetting transition.

92 T. Funaki
8 Central limit theorem
The long correlations of the ϕ-field (cf. Theorem 4.13) make the proof oflimit theorems like LDP, CLT and others nontrivial. This section discussesthe central limit theorem (CLT) for an infinite system.
We first assume d ≥ 3 and consider the ϕ-Gibbs measure µ on Zd con-
structed by Theorem 4.16. If µ has a very nice mixing property, it is easy toshow the CLT under the usual scaling for the fluctuation of the ϕ-field:
ΦN = N−d/2∑
x∈DNφ(x) −Eµ[φ(x)] =⇒
N→∞N(0,m),
for some m > 0, where D is a bounded region of Rd and note that Nd/2 ≈
√
|DN |. We have seen this in Proposition 3.12 for massive Gaussian systems.However, Theorem 4.13 actually implies that
Eµ[ΦN2] ≈∑
|x|≤N|x|2−d ≈ N2 −→
N→∞∞.
Therefore, ΦN does not give the right scaling and, as we did in (3.17) or in(3.18), we should scale-down it and consider
ΦN = N−1ΦN = N−d/2∑
x∈DNN−1 φ(x) −Eµ[φ(x)] (8.1)
or the random signed measures
ΦN (dθ) = N−d/2∑
x∈Zd
N−1 φ(x) −Eµ[φ(x)] δx/N (dθ), (8.2)
for θ ∈ Rd. Since (8.2) is the usual CLT scaling for the ∇ϕ-field (recall Sect.
3.4), it is natural to introduce the fluctuation fields ΨNi , 1 ≤ i ≤ d for ∇φ =∇φ(b); b ∈ (Zd)∗ as
ΨNi (dθ) = N−d/2∑
x∈Zd
∇iφ(x) − ui δx/N (dθ), (8.3)
for θ ∈ Rd, where ui = E[∇iφ(x)]; recall (3.19) for the Gaussian case. In
fact, Naddaf and Spencer [237] studied ΨNi under the ergodic ∇ϕ-Gibbs mea-sure µ∇
u with mean u = (ui)di=1 ∈ R
d and established the CLT. The latticedimension d ≥ 1 is arbitrary, since the ∇ϕ-field is dealt with. The result islater extended to the dynamic level by Giacomin et al. [169], which actuallyconcludes the static result of Naddaf and Spencer, see Sect.11.
In (8.1) or in (8.2), φ(x) is divided by N . This may be explained in thefollowing manner: Our real object is the ∇ϕ-field and, from this point of view,φ(x) is expressed as the sum of ∇φ(b)’s along a path connecting O and x. Sincethe typical length of the path is N , it is natural for the ϕ-field to be dividedby N .
We now state the CLT result.

Stochastic Interface Models 93
Theorem 8.1 ([237]) There exists a positive definite d × d matrix q =(qij(u))1≤i,j≤d such that
limN→∞
Eµ∇u
[
e√−1〈ΨNi ,f〉
]
= exp
−1
2
(
∂f
∂θi, A
∂f
∂θi
)
= exp
1
2
∫
Rd
k2i
k · qk |f(k)|2 dk
holds for every f = f(θ) ∈ C∞0 (Rd). Here, A is a positive definite integral op-
erator determined by A−1 = −∑di,j=1 qij
∂2
∂θi∂θj, f(k) is the Fourier transform
of f , 〈ΨNi , f〉 =∫
fdΨNi and k · qk =∑
ij qijkikj . The concrete form of thematrix q will be given in Theorem 11.1, (11.1).
We outline the proof of Theorem 8.1. The potential V is always supposedto satisfy the conditions (V1)-(V3) in (2.2). The basic idea is the usage of theHelffer-Sjostrand representation on Z
d.Consider the differential operators ∂x, ∂
∗x and L defined by
∂x =∂
∂φ(x), ∂∗x = −∂x +
∑
y∈Zd:|x−y|=1
V ′(φ(x) − φ(y)),
L = −∑
x∈Zd
∂∗x∂x,
acting on the functions F = F (φ) of φ = φ(x);x ∈ Zd. ∂∗x is the dual
operator of ∂x (with respect to the ϕ-Gibbs measure µ at least when d ≥ 3)and L is the generator of the SDEs (2.13) on Z
d, i.e., the operator (2.15) withΓ = Z
d. We further introduce the operator
L = L+Q
acting on F = F (x, φ), where Q is defined by
QF (x, φ) =
d∑
i=1
(∇∗i V
′′(∇iφ(·))∇i)F (x, φ).
Recall that
∇ig(x) = g(x+ ei) − g(x), ∇∗i g(x) = g(x− ei) − g(x).
In Sect. 4.1 Q is denoted by QφZd
. Assuming u = 0 for simplicity, set
GN (t) = Eµ∇0
[
et〈ΨNi ,f〉
]
.
Then, taking
vN (x, φ) = L−1∇∗i f
N (x), fN (x) = N− d2−1f(x/N),

94 T. Funaki
we have for every x ∈ Zd
∂x
∑
y∈Zd
∂∗yvN
(x, φ) = LvN (x, φ) = ∇∗i f
N (x) = ∂x〈ΦN ,∇∗i f
N 〉.
We have used [∂x, ∂∗y ] = ∂x∂yH (H is a formal Hamiltonian on Z
d) and
∂xvN (y, φ) = ∂yv
N (x, φ) for the first equality. These identities imply
∑
y∈Zd
∂∗yvN = 〈ΦN ,∇∗
i fN 〉.
We accordingly obtain
d
dtGN (t) = Eµ
∇0
[
〈ΦN ,∇∗i f
N 〉et〈ΨNi ,f〉]
= Eµ∇0
∑
x∈Zd
∂∗xvNet〈Ψ
Ni ,f〉
=∑
x∈Zd
Eµ∇0
[
vN∂xet〈ΨNi ,f〉
]
=∑
x∈Zd
Eµ∇0
[
vN · t∇∗i f
N (x)et〈ΨNi ,f〉
]
= tEµ∇0
∑
x∈Zd
vN∇∗i f
N (x) −ANf
et〈ΨNi ,f〉
+ tANf GN (t),
where ANf is an arbitrary constant. The next proposition is essentially a ho-mogenization result for the random walk in random environment:
Proposition 8.2 Take ANf = (∇∗i f
N , A∇∗i f
N). Then we have
limN→∞
Eµ∇0
[
(∇∗i f
N ,L−1(∇∗i f
N)) −ANf2]
= 0,
where ( , ) means the inner product on Zd.
Once this is shown, the first term in the last line of the above equalitiesvanishes as N → ∞. Thus we have
limN→∞
d
dtlogGN (t) = t
(
∂f
∂θi, A
∂f
∂θi
)
,
which concludes the proof of Theorem 8.1. utRemark 8.1 In one dimension, ∇φ(x);x ∈ Z form i.i.d. for general (non-convex) potential. Therefore, the CLT is obvious and q(u) coincides with thevariance of νu,see Remark 4.4.

Stochastic Interface Models 95
9 Characterization of ∇ϕ-Gibbs measures
In Sect. 4.4, for each average tilt u ∈ Rd, an infinite volume ∇ϕ-Gibbs measure
µ∇u on (Zd)∗, which is tempered (i.e., square integrable), shift invariant and
ergodic under shifts, in other words, ∇ϕ-pure phase was constructed, seeTheorem 4.15 and recall Definition 2.2 for the notion of ∇ϕ-Gibbs measures.The tightness argument based on the Brascamp-Lieb inequality was essential.
This section addresses the uniqueness problem for the ∇ϕ-pure phase µ∇u
for each u ∈ Rd. The well-known Dobrushin’s uniqueness argument [90], [91]
does not work here, since if it works the correlation functions of the fields mustdecay exponentially fast. But this can not happen as we have seen already.We shall solve the problem based on the dynamic coupling, i.e., by char-acterizing all equilibrium (stationary) measures for the dynamics of gradientfields ∇φt associated with those of heights fields φt determined by the SDE(2.13) by means of the relation (2.6):
ηt(b) ≡ ∇φt(b) = φt(xb) − φt(yb),
where b = 〈xb, yb〉 ∈ (Zd)∗ are directed bonds in Zd. Considering ∇φt is
natural in the sense that the dynamics (2.13) for the ϕ-field on Zd is invariant
under the uniform translation φ(x) → φ(x) + a.Since ∇ϕ-Gibbs measures are reversible and therefore stationary for the
stochastic processes ηt = ηt(b); b ∈ (Zd)∗ under shift invariance and tem-peredness (see Proposition 9.4), the study of stationary measures for ηt yieldsan information for the ∇ϕ-Gibbs measures. Our result can roughly be statedas follows: Under the conditions (V1)-(V3) in (2.2) on the potential V , for eachu ∈ R
d there exists a unique tempered, shift invariant, ergodic under shiftsand stationary probability measure µ∇
u for ηt with mean u (average tilt), cf.Theorem 9.3. Especially, there exists a unique ∇ϕ-Gibbs measure which istempered, shift invariant, ergodic under shifts and has mean u, see Corollary9.6. This will play an important role in establishing the hydrodynamic limitlater, and has been already applied to show several properties of the surfacetension σ = σ(u), see Sect. 5.4.
9.1 ϕ-dynamics on Zd and ∇ϕ-dynamics on (Zd)∗
According to (2.13) the dynamics of the height variables φt = φt(x) ∈ RZd
are governed by the SDE
dφt(x) = −∑
b:xb=x
V ′(∇φt(b)) dt+√
2dwt(x), x ∈ Zd, (9.1)
where wt(x);x ∈ Zd is a family of independent one dimensional standard
Brownian motions. The potential V is always assumed to satisfy the conditions
(V1)-(V3). The dynamics for height differences ηt = ηt(b) ∈ R(Zd)∗ are then
determined by the SDE

96 T. Funaki
dηt(b) = −
∑
b′:xb′=xb
V ′(ηt(b′)) −
∑
b′:xb′=yb
V ′(ηt(b′))
dt+√
2dwt(b), (9.2)
for b ∈ (Zd)∗, where wt(b) = wt(xb)−wt(yb). Indeed, writing down the SDEs(9.1) for φt(xb) and φt(yb) and then taking their difference, (9.2) is readilyobtained. Since ηt fulfills the loop condition, the state space of the process ηtis X which has been introduced in Sect. 2.3.
The relationship between the solutions of (9.1) and (9.2) is summarizedin the next lemma. Recall that the height differences ηφ are associated withthe heights φ by (2.6) and, conversely, the heights φη,φ(O) can be constructedfrom height differences η and the height variable φ(O) at x = O by (2.7). Wealways assume η0 ∈ X for the initial data of (9.2).
Lemma 9.1 (1) The solution of (9.2) satisfies ηt ∈ X for all t > 0.(2) If φt is a solution of (9.1), then ηt := ηφt is a solution of (9.2).(3) Conversely, let ηt be a solution of (9.2) and define φt(O) through (9.1) forx = O and ∇φt(b) replaced by ηt(b) with arbitrary initial condition φ0(O) ∈ R.Then φt := φηt,φt(O) is a solution of (9.1).
To discuss the existence and uniqueness of solutions to (9.2), the space Xis rather big and therefore we introduce weighted `2-spaces on (Zd)∗ as wehave done for ϕ-field in Sect. 3.2:
`2r,∗ ≡ `2r((Zd)∗) := η ∈ R
(Zd)∗ ; |η|2r :=∑
b∈(Zd)∗
η(b)2e−2r|xb| <∞,
for r > 0. The increasing order of η is controlled exponentially in the space`2r,∗. We denote Xr = X∩`2r,∗ equipped with the norm | · |r. Then, the condition(V.3) on V implies global Lipschitz continuity in Xr, r > 0, of the drift termof the SDE (9.2). Therefore, a standard method of successive approximationsyields the following lemma.
Lemma 9.2 For each η ∈ Xr, r > 0, the SDE (9.2) has a unique Xr-valuedcontinuous solution ηt starting at η0 = η.
9.2 Stationary measures and ∇ϕ-Gibbs measures
Let us formulate the results precisely. We shall consider the following classesof probability measures on X :
P2(X ) = µ∇ ∈ P(X )| Eµ∇
[η2(b)] <∞ for every b ∈ (Zd)∗,S = µ∇ ∈ P2(X )| shift invariant and stationary for ηt,ext S = µ∇ ∈ S| ergodic under shifts,(ext S)u = µ∇ ∈ ext S| µ∇ has mean u, u = (ui)
di=1 ∈ R
d.

Stochastic Interface Models 97
The last condition means Eµ∇
[η(ei)] = ui for every 1 ≤ i ≤ d, where ei ∈ Zd
denotes the i-th unit vector and the bond 〈ei, 0〉 is also denoted by ei. Themeasures µ∇ ∈ P2(X ) are called tempered. The set P(Xr), r > 0, is definedcorrespondingly and P2(Xr) stands for the set of all µ ∈ P(Xr) such thatEµ[|η|2r] <∞. Note that S ⊂ P2(Xr) for every r > 0.
With these notation, the uniqueness of stationary measures under the ∇ϕ-dynamics is formulated in the next theorem.
Theorem 9.3 ([157]) (uniqueness of stationary measures for ηt) For everyu ∈ R
d there exists at most one µ ∈ (ext S)u, i.e., ](extS)u ≤ 1.
The proof of this theorem is given based on a coupling argument; namely,assuming that there exist two different measures µ∇, µ∇ ∈ (ext S)u, we con-struct two solutions φt and φt of the SDEs (2.13) with common Brownianmotions wt = wt(x);x ∈ Z
d in such a way that the gradients ∇φ0 and ∇φ0
of their initial data are distributed under µ∇ and µ∇, respectively. Then, com-puting the time derivative of
∑
x∈ΛE[(φt(x) − φt(x))2] for each Λ b Z
d, one
can finally conclude µ∇ = µ∇ by letting Λ Zd and noting the ergodicity of
µ∇ and µ∇. The ergodicity helps to deal with the boundary terms. The strictconvexity of V plays an essential role. The details will be discussed in Sect.9.3.
We now consider the family of the ∇ϕ-Gibbs measures on (Zd)∗, recallDefinition 2.2:
G∇ = µ∇ ∈ P2(X )| shift invariant ∇ϕ-Gibbs measures.
The classes ext G∇ and (ext G∇)u are similarly defined, so that µ∇ ∈ ext G∇ isergodic under shifts and µ∇ ∈ (ext G∇)u has mean u. Note that, if µ ∈ P2(X )is shift-invariant, then µ ∈ P2(Xr) for all r > 0. Since µ∇
Λ,ξ is reversible
under the evolution governed by finite dimensional SDEs for ∇ϕ-field on Λ∗
with boundary condition ξ, one can show the following proposition by lettingΛ Z
d, see Sect. 9.4
Proposition 9.4 Every µ∇ ∈ G∇ is reversible under the dynamics ηt definedby the SDE (9.2). In particular, we have G∇ ⊂ S.
Theorem 9.3 and Proposition 9.4 imply the uniqueness of tempered, shiftinvariant and ergodic ∇ϕ-Gibbs measures for each mean tilt u:
Theorem 9.5 ([157]) (uniqueness of ∇ϕ-Gibbs measures) For every u ∈ Rd
there exists at most one µ∇ ∈ (extG∇)u.
Proof. By Proposition 9.4, µ∇ ∈ extG∇ implies µ∇ ∈ extS. Consequentlythe conclusion follows from Theorem 9.3. ut
Combining this with Theorem 4.15 (existence of ∇ϕ-Gibbs measures) wehave the following corollary.

98 T. Funaki
Corollary 9.6 ([157]) (characterization of all tempered and shift invariant∇ϕ-Gibbs measures) For every u ∈ R
d, (extG∇)u = µ∇u . In particular, the
family G∇ is the convex hull of µ∇u |u ∈ R
d.
9.3 Proof of Theorem 9.3
Energy inequality
We first prepare an energy inequality for φt. After computing the time deriva-tive, the proof is essentially due to the rearrangement of the sum, which is adiscrete analogue of Green-Stokes’ formula.
Lemma 9.7 Let φt and φt be two solutions of (9.1) and set φt(x) := φt(x)−φt(x). Then, for every Λ b Z
d, we have
∂
∂t
∑
x∈Λ
(
φt(x))2
= IΛt +BΛt , (9.3)
where
IΛt = −∑
b∈Λ∗
∇φt(b)
V ′(∇φt(b)) − V ′(∇φt(b))
,
BΛt = 2∑
b∈∂Λ∗
φt(yb)
V ′(∇φt(b)) − V ′(∇φt(b))
.
The interior term IΛt and the boundary term BΛt admit the following bounds,respectively,
IΛt ≤ −c−∑
b∈Λ∗
(
∇φt(b))2
, (9.4)
BΛt ≤ 2c+∑
b∈∂Λ∗
|φt(yb)| |∇φt(b)|. (9.5)
Proof. From the equation (9.1),
∂
∂t
(
φt(x))2
= −2∑
b:xb=x
Φt(b) · φt(x) = −
∑
b:xb=x
Φt(b) −∑
b:yb=x
Φt(b)
φt(x),
whereΦt(b) := V ′(∇φt(b)) − V ′(∇φt(b)).
The second equality uses the symmetry of V which implies V ′(∇φ(b)) =−V ′(∇φ(−b)). The right hand side summed over x ∈ Λ becomes
−∑
x∈Λφt(x)
∑
b:xb=x
Φt(b) +∑
x∈Λφt(x)
∑
b:yb=x
Φt(b)

Stochastic Interface Models 99
= −∑
b∈Λ∗
∇φt(b)Φt(b) −∑
b:xb∈Λ,yb /∈Λφt(xb)Φt(b) +
∑
b:yb∈Λ,xb /∈Λφt(yb)Φt(b)
= IΛt +BΛt ,
which proves (9.3). To obtain the term BΛt we again used the symmetry ofV . The two bounds (9.4), (9.5) follow from the condition (V.3) on V . ut
Dynamic coupling
The proof of Theorem 9.3 is reduced to a proposition which also implies theLipschitz continuity of the derivative of the surface tension σ(u), see Theorem5.3 above. Suppose that there exist µ∇ ∈ (extS)u and µ∇ ∈ (extS)v for u, v ∈Rd. Let us construct two independent Xr-valued random variables η = η(b)
and η = η(b) on a common probability space (Ω,F , P ) in such a mannerthat η and η are distributed by µ∇ and µ∇ under P , respectively. We defineφ0 = φη,0 and φ0 = φη,0 using the notation in (2.7). Let φt and φt be thetwo solutions of the SDE (9.1) with common Brownian motions having initialdata φ0 and φ0. In view of Lemmas 9.1 and 9.2 such solutions certainly exist.Since µ∇, µ∇ ∈ S, we conclude that ηt := ηφt and ηt := ηφt are distributedby µ∇ and µ∇, respectively, for all t ≥ 0. Our claim is then the following.
Proposition 9.8 There exists a constant C > 0 independent of u, v ∈ Rd
such that
limT→∞
1
T
∫ T
0
d∑
α=1
EP [(ηt(eα) − ηt(eα))2] ≤ C|u− v|2. (9.6)
Once this proposition is proved, Theorem 9.3 immediately follows. Indeed,suppose that there exist two measures µ∇, µ∇ ∈ (ext S)u. Then Proposition9.8 with u = v implies
limT→∞
∫
|η − η|2rPT (dηdη) = 0, (9.7)
where PT is a shift-invariant probability measure on Xr × Xr, r > 0, definedby
PT (dηdη) :=1
T
∫ T
0
P (ηt(b), ηt(b)b ∈ dηdη) dt.
The first marginal of PT is µ∇ and the second one is µ∇. Thus (9.7) impliesthat the Vaserstein distance between µ∇ and µ∇ vanishes and hence µ∇ = µ∇,see, e.g., [136], p.482 for the Vaserstein metric on the space P2(Xr). Thisconcludes the proof of Theorem 9.3.

100 T. Funaki
Proof of Proposition 9.8
Step 1. We apply Lemma 9.7 to the differences φt(x) := φt(x)− φt(x) andobtain, with the choice Λ = Λ`,
EP
[
∑
x∈Λ`
(
φT (x))2]
+ c−
∫ T
0
EP
∑
b∈Λ∗`
(
∇φt(b))2
dt
≤ EP
[
∑
x∈Λ`
(
φ0(x))2]
+ 2c+
∫ T
0
EP
∑
b∈∂Λ∗`
|φt(yb)| |∇φt(b)|
dt (9.8)
for every T > 0 and ` ∈ N. Set
g(t) =
d∑
α=1
EP[
(
∇φt(eα))2]
.
Then, noting that the distribution of (ηt, ηt) = (∇φt,∇φt) on Xr × Xris shift invariant, the second term on the left hand side of (9.8) coincides
with c−d−1|Λ∗` |∫ T
0g(t) dt. On the other hand, estimating |φt(yb)| |∇φt(b)| ≤
`γ|∇φt(b)|2 +`−1γ−1|φt(yb)|2/2 for arbitrary γ > 0, the second term on theright hand side is bounded by
c+`γd−1|∂Λ∗
` |∫ T
0
g(t) dt+ c+`−1γ−1|∂Λ∗
` |∫ T
0
supy∈∂Λ`
‖φt(y)‖2L2(P ) dt.
Then, choosing γ = c−/2c+c0 with c0 := sup`≥1`|∂Λ∗` |/|Λ∗
` | <∞, we obtainfrom (9.8)
∫ T
0
g(t) dt ≤ 2d
c−|Λ∗` |EP
[
∑
x∈Λ`
(
φ0(x))2]
+(2c+c0)
2d
(c−`)2
∫ T
0
supy∈∂Λ`
‖φt(y)‖2L2(P ) dt, (9.9)
where we have dropped the nonnegative first term on the left hand side of(9.8).Step 2. Here we derive the following bound on the boundary term: For eachε > 0 there exists an `0 ∈ N such that
supy∈∂Λ`
‖φt(y)‖2L2(P ) ≤ C1
(
ε2`2 + `2|u− v|2 + `−2t
∫ t
0
g(s) ds
)
(9.10)
for every t > 0 and ` ≥ `0, where C1 > 0 is a constant independent of ε, `,and t. To this end, as an immediate consequence of the mean ergodic theoremapplied to µ∇ ∈ (ext S)u, we have

Stochastic Interface Models 101
lim|x|→∞
1
|x| ‖φη,0(x) − x · u‖L2(µ∇) = 0 (9.11)
and correspondingly for µ∇ with v in place of u. Taking Λ′ = Λ[`/2] one obtains
‖φt(y)‖L2(P ) ≤‖φt(y) −1
|Λ′|∑
x∈Λ′
φt(x) − y · u‖L2(P )
+ ‖φt(y) −1
|Λ′|∑
x∈Λ′
φt(x) − y · v‖L2(P )
+ ‖ 1
|Λ′|∑
x∈Λ′
φt(x)‖L2(P ) +√d`|u− v|
=:I1 + I2 + I3 + I4,
for y ∈ ∂Λ`. However, since∑
x∈Λ′ x = 0 and using (9.11),
I1 ≤ 1
|Λ′|∑
x∈Λ′
‖φt(y) − φt(x) − (y − x) · u‖L2(P )
=1
|Λ′|∑
x∈Λ′
‖φη,0(y − x) − (y − x) · u‖L2(µ∇) ≤ ε`
provided ` is sufficiently large; recall that ∇φt is distributed by µ∇ for allt ≥ 0. Similarly, I2 ≤ ε` for sufficiently large `. Finally, since as in the proofof Lemma 9.7
∂
∂t
∑
x∈Λ′
φt(x)
= −∑
x∈Λ′
∑
b:xb=x
Φt(b) =∑
b∈(∂Λ′)∗
Φt(b),
I3 is bounded as
I3 ≤ ‖ 1
|Λ′|∑
x∈Λ′
φ0(x)‖L2(P ) +
∫ t
0
1
|Λ′|∑
b∈(∂Λ′)∗
‖Φs(b)‖L2(P ) ds.
The right hand side can be further estimated as
∑
b∈(∂Λ′)∗
‖Φs(b)‖L2(P ) ≤ c+d−1|(∂Λ′)∗|
d∑
α=1
‖∇φs(eα)‖L2(P )
and, using again (9.11),
‖ 1
|Λ′|∑
x∈Λ′
φ0(x)‖L2(P ) ≤1
|Λ′|∑
x∈Λ′
‖φη,0(x) − x · u‖L2(µ∇)
+‖φη,0(x) − x · v‖L2(µ∇) + |x| · |u− v|
≤ ε`+√d`|u− v|,

102 T. Funaki
for sufficiently large `. Therefore,
I3 ≤ ε`+√d`|u− v| + c+d
−1|Λ′|−1|(∂Λ′)∗|∫ t
0
d∑
α=1
‖∇φs(eα)‖L2(P ) ds
for sufficiently large `. This completes the proof of (9.10).Step 3. Using (9.11), one can choose `1 ∈ N such that
1
|Λ`|∑
x∈Λ`
EP[
(
φ0(x))2]
≤ 3
|Λ`|∑
x∈Λ`
‖φη,0(x) − x · u‖2L2(µ∇)
+|x · u− x · v|2 + ‖φη,0(x) − x · v‖2L2(µ∇)
≤ ε2`2 + 3d`2|u− v|2, (9.12)
for every ` ≥ `1. Inserting the estimates (9.10) and (9.12) into (9.9), we have∫ T
0
g(t) dt ≤ C2(ε2`2 + `2|u− v|2)
+ C2`−2
∫ T
0
(
ε2`2 + `2|u− v|2 + `−2t
∫ t
0
g(s) ds
)
dt
≤ C2(ε2 + |u− v|2)(`2 + T ) + C2`
−4T 2
∫ T
0
g(t) dt
for every T > 0 and ` ≥ `2 := max`0, `1, which may depend on u, v, andε > 0. C2 is a constant independent of u, v and ε. Choosing ` = (2C2T
2)1/4
and letting T → ∞, we obtain
limT→∞
1
T
∫ T
0
g(t) dt ≤ 2C2(√
2C2 + 1)(ε2 + |u− v|2)
for every ε > 0. Finally, letting ε→ 0, the desired estimate (9.6) is shown. ut
9.4 Proof of Proposition 9.4
We establish the reversibility of the ∇ϕ-Gibbs measures under the dynamics(9.2). To this end, we need the approximation of the solutions of (9.2) by thecorresponding finite volume equations, cf. [97], [266], [298] for related results.For every ξ ∈ X and Λ b Z
d, let us consider the SDE
dηt(b) = −
∑
b:xb=xb∈ΛV ′(ηt(b)) −
∑
b:xb=yb∈ΛV ′(ηt(b))
dt
+√
2dwΛt (b), b ∈ Λ∗,
ηt(b) = ξ(b), b /∈ Λ∗,
η0(b) = ξ(b), b ∈ (Zd)∗,
(9.13)

Stochastic Interface Models 103
where wΛt (b) = 1xb∈Λwt(xb) − 1yb∈Λwt(yb). The distribution on the spaceC([0, T ],X ) of the solution ηt ≡ ηΛt is denoted by PΛξ . The distribution of thesolution of the SDE (9.2) starting at ξ is denoted by Pξ. Let C∞
loc,b(X ) denote
the family of all (tame) functions F on X of the form F (η) = F (η(b); b ∈ Λ∗)for some Λ b Z
d and F ∈ C∞b (RΛ
∗
). Then the next lemma is standard byshowing the tightness of PΛξ Λ and the unique characterization of Pξ in termsof the martingale problem, see Proposition 2.2 of [157].
Lemma 9.9 For every ξ ∈ Xr and F ∈ C∞loc,b(X ),
limΛZd
EPΛξ [F (ηt)] = EPξ [F (ηt)].
We are now at the position to complete the proof of Proposition 9.4. Tothis end, it suffices to show that every µ∇ ∈ G∇ satisfies
∫
XrF (ξ)EPξ [G(ηt)]µ
∇(dξ) =
∫
XrEPξ [F (ηt)]G(ξ)µ∇(dξ) (9.14)
for every t ≥ 0 and F,G ∈ C∞loc,b. However, for every ψ ∈ R
Zd
and Λ b Zd, if
we consider the SDE for φt ∈ RZd
:
dφt(x) = −∑
b:xb=x
V ′(∇φt(b)) dt+√
2dwt(x), x ∈ Λ,
φt(x) = ψ(x), x /∈ Λ,
φ0(x) = ψ(x), x ∈ Zd,
(9.15)
then the finite volume ϕ-Gibbs measure µψΛ is clearly reversible under (9.15);recall (4.5) taking ρ = 0. Therefore, since ηt = ∇φt satisfies (9.13) providedψ = φξ,0, µ∇
Λ,ξ is reversible under (9.13), i.e.,
∫
XΛ∗,ξ
F (η)EPΛη∨ξ [G(ηt)]µ
∇Λ,ξ(dη) =
∫
XΛ∗,ξ
EPΛη∨ξ [F (ηt)]G(η)µ∇
Λ,ξ(dη)
(9.16)for all ξ ∈ X if both F and G are supported in Λ. For given µ∇ ∈ G∇,integrating both sides of (9.16) with respect to µ∇(dξ) we have by the DLRequation
∫
XrF (ξ)EP
Λξ [G(ηt)]µ
∇(dξ) =
∫
XrEP
Λξ [F (ηt)]G(ξ)µ∇(dξ).
Hence, (9.14) follows from Lemma 9.9 by letting Λ Zd. ut
Remark 9.1 Results similar to Proposition 9.4 together with its conversewere obtained for lattice systems by [97], [266], [299] and for continuum sys-tems by [191], [136].

104 T. Funaki
Remark 9.2 The dynamic approach might work also to construct the ∇ϕ-Gibbs measures, see [136], Proposition 6.2 for the massive continuum field.
Remark 9.3 Sheffield [265] gives a different proof for Theorem 9.5 in moregeneral setting based on the argument called “cluster swapping”.
Remark 9.4 Gawedzki and Kupiainen [161] considered the ∇ϕ interfacemodel with V (η) = 1
2η2+λη4 and proved that, applying the Wilson-Kadanoff’s
renormalization group repeatedly, the limit becomes the massless Gaussianfield ith the potential 1
2 c(λ)η2 with a proper positive constant c(λ) determined
depending on λ.
9.5 Uniqueness of ϕ-Gibbs measures
Although the existence of shift invariant ϕ-Gibbs measures is not clearly es-tablished in general yet (cf. Theorem 4.16) except the Gaussian case (cf. Sect.6.6), the uniqueness can be shown from Theorem 9.5.
Theorem 9.10 For every h ∈ R, the square integrable, shift invariant andergodic (under shifts) ϕ-Gibbs measure µ with mean h (i.e., Eµ[φ(x)] = h forevery x ∈ Z
d) is unique.
Proof. Let φ = φ(x);x ∈ Zd be µ-distributed. For each x ∈ Λ`, φ(x) is
represented as
φ(x) =1
|∂Λ`|∑
y∈∂Λ`
φ(y) +1
|∂Λ`|∑
y∈∂Λ`
∑
b∈Cy,x
∇φ(b),
where Cy,x are chains connecting y and x. However, letting ` → ∞, the firstterm in the right hand side converges to h in L1(µ) by the ergodicity of µ.Therefore, from Theorem 9.5, we see that every finite dimensional distributionof φ under µ is uniquely determined. ut

Stochastic Interface Models 105
10 Hydrodynamic limit
We now entirely move toward the investigation on the dynamics for theheights. The random time evolution of microscopic height variables φt =φt(x), t ≥ 0 was naturally introduced in Sect. 2.4 from the HamiltonianH(φ) by means of Langevin equations. This section analyzes its macroscopicbehavior under the space-time diffusive scaling defined by (2.17). We shall es-tablish the LLN, called hydrodynamic limit, for ϕ-dynamics on T
dN or on DN .
It is shown that the evolutional law of the macroscopic interfaces is governedby the motion by mean curvature with anisotropy in the limit, and describedby the nonlinear PDE with diffusion coefficient formally given by the Hessianof the surface tension σ = σ(u). The corresponding CLT for ∇ϕ-dynamics on(Zd)∗ which are in equilibrium and the LDP for ϕ-dynamics on T
dN will be
studied in Sects. 11 and 12, respectively. The dynamics with the wall effector those in two media realized by adding weak self potential will be discussedin Sects. 13, 14, 15 and 16.
10.1 Space-time diffusive scaling limit
Let us consider the SDEs (2.9) on a big but finite lattice domain Γ . Weshall take Γ = T
dN (i.e., we discuss under periodic boundary conditions) or
Γ = DN for a bounded domain D in Rd having piecewise Lipschitz boundary
with properly scaled boundary conditions ψ ∈ R∂+DN . More exactly saying,
when Γ = TdN , the SDEs have the form
dφt(x) = −∑
y∈TdN :|x−y|=1
V ′(φt(x) − φt(y))dt +√
2dwt(x), (10.1)
for x ∈ TdN , while, when Γ = DN , they have the form
dφt(x) = −∑
y∈DN :|x−y|=1
V ′(φt(x) − φt(y))dt+√
2dwt(x), (2.11)′
for x ∈ DN with the boundary conditions
φt(y) = ψ(y), y ∈ ∂+DN . (2.12)′
(a) Main theorem
Under the space-time diffusive scaling for the evolution of microscopic heightvariables φt = φt(x) of the interface, macroscopic height variables hN (t) =hN(t, θ) are defined as step functions on the torus T
d or on the domain Dby the formula (2.17):
hN (t, θ) =1
NφN2t([Nθ]), θ ∈ T
d or D.

106 T. Funaki
Or, we adopt the definition
hN (t, θ) =∑
x∈TdN (or DN )
1
NφN2t(x)1B(x/N,1/N)(θ), (10.2)
where B(θ, a) =∏di=1[θi−a/2, θi+a/2) denotes the d dimensional cube (box)
with center θ = (θi)di=1 and side length a > 0.
The goal is to study the behavior of hN (t) as N → ∞. Two definitions
(2.17) and (10.2) coincide if B(θ, a) is taken as∏di=1[θi, θi+a). The difference
is therefore only the componentwise shift in the variable θ by 1/2N , but this isnegligible in the limit. The conditions (V1)-(V3) in (2.2) are always assumedon the potential V .
Theorem 10.1 (Hydrodynamic Limit, Funaki and Spohn [157] on thetorus T
d, Nishikawa [239] on D with boundary conditions) Assume that initialrandom configuration φ0 = φ0(x);x ∈ T
dN of the SDEs (10.1) converges to
some non-random h0 ∈ L2(Td) in the sense that
limN→∞
E[‖hN(0) − h0‖2] = 0, (10.3)
where ‖ · ‖ denotes the usual L2-norm of the space L2(Td). Then, for everyt > 0,
limN→∞
E[‖hN (t) − h(t)‖2] = 0
holds and the limit h(t) = h(t, θ) is a unique weak solution of the nonlinearpartial differential equation (PDE)
∂h
∂t(t, θ) = div ∇σ(∇h(t, θ))
≡d∑
i=1
∂
∂θi
∂σ
∂ui(∇h(t, θ))
, θ ∈ Td, (10.4)
having initial data h0, where σ = σ(u) is the normalized surface tension de-fined in Sect. 5.1, (5.2).
The theorem is only stated for the torus Td, but similar result holds on D
and in the space L2(D). In this case, the PDE (10.4) requires a macroscopicboundary condition g at ∂D. The PDE (10.4) describes the motion by meancurvature (MMC) with anisotropy, see the next paragraph (b). The limit h(t)is non-random and therefore Theorem 10.1 is at the level of the LLN.
Remark 10.1 (1) If σ ∈ C2(Rd) which is not yet shown (see Problem5.1), the diffusion coefficient of the PDE (10.4) is given by the Hessian(∂2σ/∂ui∂uj)ij of σ.(2) In the Gaussian case (i.e., V (η) = 1
2η2), σ(u) = 1
2 |u|2 and the limit equa-tion (10.4) is linear heat equation. In fact, this can be directly seen, since the

Stochastic Interface Models 107
drift term of the SDEs (10.1) is ∆φt(x) for such potential V ; recall the SDEs(2.20) and that ∆ denotes the discrete Laplacian. The space-time diffusivescaling leads the discrete Laplacian to the continuum one.
(b) Physical meaning of the PDE (10.4)
The total surface tensions ΣTd(h) on the torus Td orΣD(h) onD of the macro-
scopic surface h = h(θ) were introduced in (6.2). The Frechet derivatives ofΣ = ΣTd or ΣD are given by
δΣ
δh(θ)(h) = − div (∇σ)(∇h(θ)) .
Therefore, the hydrodynamic equation (10.4) can be regarded as a gradientflow for Σ
∂h
∂t(t) = −δΣ
δh(h(t)), (10.5)
namely the surface moves relaxing its total surface energy. For isotropic motionby mean curvature one would have σ(u) =
√
1 + |u|2; note that Σ(h) is thesurface area of h and δΣ/δh is the mean curvature in such case. In our casethis is likely to hold for small |u|, however σ(u) ' |u|2 for large |u|, whichreflects the constraints due to the underlying microscopic lattice structure.
(c) Formal derivation of the PDE (10.4)
We work on Td just for fixing the notation. For every test function f = f(θ) ∈
C∞(Td), we have that
〈hN (t), f〉 :=
∫
Td
hN (t, θ)f(θ) dθ
=1
Nd+1
∑
x∈TdN
φN2t(x)[f ]N (x/N),
where
[f ]N (x/N) := Nd
∫
B(x/N,1/N)
f(θ) dθ.
Then, applying Ito’s formula and recalling the symmetry of V in our basicconditions (2.2), we have by summation by parts that
〈hN (t), f〉 − 〈hN (0), f〉
= −∫ t
0
1
Nd
d∑
i=1
∑
x∈TdN
V ′(∇iφN2s(x))∂f
∂θi
( x
N
)
ds+ o(1). (10.6)
The last error term o(1) involves those for the replacement of ∇Ni [f ]N (macro-
scopically normalized discrete differential, see Sect. 10.2-(b)) with ∂f/∂θi andthe martingale term:

108 T. Funaki
mN(t, f) =
√2
Nd+1
∑
x∈TdN
wN2t(x)[f ]N( x
N
)
,
which goes to 0 since E[mN (t, f)2] = O(N−d). Note that the divergent factorN2 carried under the time change has disappeared, see Problem 10.1 below.
The left hand side of (10.6) would converge to 〈h(t), f〉 − 〈h0, f〉. On theother hand, the right hand side consists of a large scale sum of complex vari-ables. However, one would expect the so-called local equilibrium stateswere realized in the system, i.e., around each macroscopic space-time point(s, θ) the distribution of the gradient field corresponding to the microscopicheight variables φN2s(x);x ∼ Nθ would reach the equilibrium state µ∇
∇h(s,θ),
which is the ∇ϕ-Gibbs measure with mean tilt ∇h(s, θ). Thus, by means of thelocal ergodicity, i.e., under large sum, V ′(∇iφN2s(x)) in the right hand side
could be replaced with its ensemble average Eµ∇∇h(s,x/N) [V ′(∇iφ(0))] which
coincides with ∂σ/∂ui(∇h(s, x/N)) from (5.14); note that ∇iφ(0) = ∇φ(ei)under different two notation. Therefore, one would obtain in the limit
d
dt〈h(t), f〉 = −〈∇σ(∇h(t)),∇f〉,
for every f ∈ C∞(Td), which is a weak form of the nonlinear PDE (10.4).The actual proof given in [157] is slightly different. It is based on the methodof entropy production initiated by [175] (see also [199], [273]) and its variant,the H−1-method, by which one can avoid the so-called two blocks’ estimatenecessary in the standard route for establishing the hydrodynamic limit. Theresult in Sect. 9 (Corollary 9.6) is substantial to complete the proof.
Remark 10.2 (1) In one dimension, Theorem 10.1 gives essentially the sameresult that [175] obtained (without convexity condition on V ), since ηt ≡ ∇φtsatisfies the same SDE that [175] considered. However, in higher dimensions,our ∇ϕ-Gibbs measures have long correlations and the situation is very dif-ferent from [175].(2) The martingale term mN (t, f) looks simply disappearing in the limit aswe have mentioned, but, in fact, this is not really true. For a > 0, considerthe SDE (10.1) with the Brownian motions
√2wt(x) replaced by
√2awt(x).
Then, starting from such SDE, we have the limit equation for the macroscopicheights
∂h
∂t(t, θ) = a div (∇σa)(∇h(t, θ)) ,
where σa is the surface tension determined by the potential a−1V . Indeed,under the time change φt := φa−1t, one can apply Theorem 10.1 for φt. WhenV is quadratic, a∇σa(u) does not depend on a, but this may not be true ingeneral.
Problem 10.1 In (10.6), we have used the summation by parts formula not-ing that V ′(η) = −V ′(−η) and this makes the right hand side of order O(1) as

Stochastic Interface Models 109
N → ∞. If the potential V is asymmetric (cf. Remark 2.1), such cancellationdoes not occur and the right hand side remains to be O(N) at least at firstlook. Models involving such divergent quantities are called of non-gradient.The hydrodynamic limit for the Ginzburg-Landau dynamics of non-gradienttype might be established based on Varadhan’s argument [287].
10.2 The nonlinear PDE (10.4)
We start now the proof of Theorem 10.1 on Td. This subsection summarizes
results on the nonlinear PDE (10.4). We recall that the surface tension σsatisfies the properties stated in Sect. 5.3.
(a) Existence and uniqueness of solutions
Let us introduce a triple of real separable Hilbert spaces V ⊂ H = H∗ ⊂ V ∗ byH = L2(Td), V = H1(Td) := h ∈ H ||∇h| ∈ H and V ∗ = H−1(Td). We alsodenote by Hd the d-fold direct product of H . These three spaces are equippedwith their standard norms denoted by ‖ · ‖, ‖ · ‖V and ‖ · ‖V ∗ , respectively.The duality relation V 〈·, ·〉V ∗ between V and V ∗ satisfies V 〈v, h〉V ∗ = 〈v, h〉if v ∈ V and h ∈ H , where 〈·, ·〉 is the scalar product of H . We consider thenonlinear differential operator
A(h) =d∑
i=1
∂
∂θiσ′i(∇h), h ∈ V,
where σ′i(u) := ∂σ/∂ui, u ∈ R
d. The next lemma follows from Theorem 5.3and Corollary 5.4:
Lemma 10.2 The operator A : V → V ∗ has the following properties forall h, h1, h2 ∈ V . The constants c− and C are those appeared in (V3) andTheorem 5.3-(1), respectively.(A1) (semicontinuity) V 〈h,A(h1 + λh2)〉V ∗ is continuous in λ ∈ R,(A2) (monotonicity) V 〈h1 −h2, A(h1)−A(h2)〉V ∗ ≤ −c−‖∇h1 −∇h2‖2,(A3) (coercivity) V 〈h,A(h)〉V ∗ + c−‖h‖2
V ≤ c−‖h‖2,(A4) (growth condition) ‖A(h)‖V ∗ ≤ C‖h‖V .
We call h(t) a solution (or anH-solution) of (10.4) with initial data h0 ∈ Hif h(t) ∈ C([0, T ], H) ∩ L2([0, T ], V ) and
h(t) = h0 +
∫ t
0
A(h(s)) ds
holds in V ∗ for a.e. t ∈ [0, T ]. The general theory on nonlinear PDEs (e.g.,[208], [15], [44], [295]) proves the existence and uniqueness of solutions to(10.4) under the conditions (A1)-(A4) of Lemma 10.2.

110 T. Funaki
Proposition 10.3 For every initial data h0 ∈ H the PDE (10.4) has a uniquesolution h(t). In addition, it admits the uniform bound
sup0≤t≤T
‖h(t)‖2 +
∫ T
0
‖h(t)‖2V dt ≤ K(‖h0‖2 + 1), (10.7)
where K is a constant depending only on c− and T .
(b) Discretization scheme and its convergence
In order to prove Theorem 10.1, one needs to compare the discrete variablehN (t) with the continuum one h(t). It is therefore convenient to introduceh],N(t), a solution of lattice approximated version of the PDE (10.4), andcompare hN (t) with h],N(t). For this purpose we define the finite differenceoperators
∇Ni f(θ) = N(f(θ + ei/N) − f(θ)),
∇N∗i f(θ) = −N(f(θ) − f(θ − ei/N)), θ ∈ T
d, 1 ≤ i ≤ d,
∇N = (∇N1 , ...,∇N
d ).
With these notations the discretized PDE of (10.4) reads
∂
∂th],N (t, θ) = AN (h],N (t))(θ) := −
d∑
i=1
∇N∗i σ′
i(∇Nh],N (t, θ)), (10.8)
for θ ∈ 1NT
dN ≡ θ ∈ T
d;Nθ ∈ TdN ⊂ T
d. It has to be solved with the initialdata
h],N0 (θ) = [h0]N (θ) := Nd
∫
[[θ]]N
h0(θ′) dθ′ (10.9)
where [[θ]]N stands for the box with center in 1NT
dN of side length 1
N containingθ ∈ T
d. Denoting by [θ]N the center of the box [[θ]]N , we extend h],N(t, θ) toTd as a step function,
h],N(t, θ) := h],N(t, [θ]N ), for θ ∈ Td. (10.10)
We mention the convergence of the solution h],N(t) of the discretized PDE(10.8) to h(t) as N → ∞. The monotonicity of the operator is essential forthe proof, see Proposition I.2 in [157] for details.
Lemma 10.4 (1) For every t > 0, h],N(t) converges to h(t) weakly in H asN → ∞, where h(t) is the unique solution of (10.4) with initial data h0 ∈ H.
(2) Assume supN∈N ‖∇Nh],N0 ‖ <∞ in addition. Then the above convergenceholds strongly in H.

Stochastic Interface Models 111
(c) Uniform Lp-bound on ∇Nh],N (t);N ∈ N
In the proof of Theorem 10.1, a certain function of ∇φ-variables divergingquadratically in ∇φ arises. Such function can be controlled in the limit, if auniform Lp-bound on the ∇ϕ-dynamics is available for some p > 2, since itimplies the uniform L2-integrability of the function. However, unfortunately,we can only derive a uniform L2-bound for the ∇ϕ-dynamics, see Sect. 10.3-(a). We shall introduce the notion of coupled local equilibria and show that auniform Lp-bound for the discretized PDE, which is derived here, compensateswith the missing estimate on the ∇ϕ-dynamics.
Let h],N (t) be the solution of (10.8) with initial data h],N0 satisfying
supN∈N ‖∇Nh],N0 ‖ < ∞. We shall derive a uniform Lp-bound on ∇Nh],N(t)in N . The norm of the space Lp(Td) is denoted by ‖ · ‖p, 1 ≤ p ≤ ∞; recallthat ‖ · ‖2 is simply denoted by ‖ · ‖.
Lemma 10.5 We have that
supN∈N
supt≥0
‖∇Nh],N (t)‖ <∞, (10.11)
supN∈N
∫ T
0
‖∇N∇Nh],N(t)‖2 dt <∞, T > 0, (10.12)
where ‖∇N∇Nh‖2 =∑di,j=1 ‖∇N
i ∇Nj h‖2, and for some p > 2,
supN∈N
∫ T
0
‖∇Nh],N(t)‖pp dt <∞. (10.13)
Proof. The proof is due to an idea quite common in the theory of PDE, e.g.,see [210], p.433. Denoting h = h],N for simplicity, we have from (10.8),
d
dt‖∇Nh(t)‖2 = −2Nd−2
∑
θ∈ 1N TdN
d∑
i=1
∇Nh(t, θ + ei/N) −∇Nh(t, θ)
·
∇σ(∇Nh(t, θ + ei/N)) −∇σ(∇Nh(t, θ))
≤ −2c−‖∇N∇Nh(t)‖2. (10.14)
We have used ∇Ni ∇N∗
j = ∇N∗j ∇N
i and ∇Nj ∇N
i = ∇Ni ∇N
j , and subsequentlyCorollary 5.4. Hence,
‖∇Nh(t)‖2 + 2c−
∫ t
0
‖∇N∇Nh(s)‖2 ds ≤ ‖∇Nh0‖2,
which shows (10.11) and (10.12). To show (10.13), we need Sobolev’s lemmafor lattice functions,
‖f‖22∗ ≤ C(‖∇Nf‖2 + ‖f‖2), f = f(θ), θ ∈ T
dN, (10.15)

112 T. Funaki
for some C > 0 independent of the lattice spacing N . Here 2∗ is the Sobolevconjugate of 2 defined by 2∗ = 2d/(d− 2) if d ≥ 3, 2∗ is an arbitrary numberlarger than 1 if d = 2 and 2∗ = ∞ if d = 1. Given (10.15), the proof of (10.13)can be completed from (10.11) and (10.12) using Holder’s inequality
‖f‖p ≤ ‖f‖1−τ‖f‖τqwith the choice of q = 2∗, p = 4 − 4/2∗(> 2) and τ = p/2. ut
10.3 Local equilibrium
(a) Uniform bound on second moments
As we have mentioned in Sect. 10.1-(c), one would expect that at positive(macroscopic) times the interface has locally a definite tilt u and a statisticsas specified by the ∇ϕ-Gibbs measure µ∇
u . Such a strong property will comeout only indirectly. However for the space-time averaged measure we willestablish that it is some mixture of ∇ϕ-Gibbs measures. In fact such propertywill be established for the measure coupled to the solution of a discretizedversion of the PDE (10.4), see Proposition 10.8 for a precise statement.
Let µ∇,Nt ∈ P(XTdN
) be the distribution of ∇φt on XTdNand AvT (µ∇,N )
be its space-time average over [0, N 2T ]× TdN :
AvT (µ∇,N ) =1
Nd
∑
x∈TdN
1
N2T
∫ N2T
0
µ∇,Nt τ−1
x dt,
for T > 0. Here τx : XTdN
→ XTdN
denotes the shift by x on TdN and note that
Nd = |TdN |. ν∇ ∈ P(XTdN) is always regarded as ν∇ ∈ P(X ) by extending
it periodically. We shall simply denote by µ∇N = µ∇
N,0 ∈ P(XTdN) the finite
volume ∇ϕ-Gibbs measure with periodic boundary conditions and tilt u = 0(see proof of Theorem 4.15).
To obtain uniform L2-bounds, we again use a coupling argument for the
SDE (10.1) on TdN . Assume that two initial data (RT
dN -valued random vari-
ables) φ0 = φ0(x);x ∈ TdN and φ0 = φ0(x);x ∈ T
dN are given and let φt
and φt be the corresponding two solutions of the SDE (10.1) with commonBrownian motions. The macroscopic ϕ-fields obtained from φt and φt by scal-ing in space, time and magnitude as in (10.2) are denoted by hN (t, θ) andhN (t, θ), θ ∈ T
d, respectively. Recall that ‖ · ‖ denotes the norm of the spaceL2(Td).
Lemma 10.6 (1) We have for every t > 0
E[‖hN(t) − hN (t)‖2] ≤ E[‖hN (0) − hN (0)‖2].
(2) Assume the condition (10.3) on the distribution µN0 of φ0. Then,
supN∈N
EAvT (µ∇,N )[η(b)2] <∞, b ∈ (Zd)∗.

Stochastic Interface Models 113
Proof. As in Lemma 9.7 we have
∂
∂t
∑
x∈TdN
(
φt(x))2
≤ −c−∑
b∈(TdN )∗
(
∇φt(b))2
with φt := φt − φt. On the torus TdN there is no boundary term. Integrating
both sides in t and dividing by Nd+2, we obtain
E[‖hN(t) − hN (t)‖2] + c−
∫ t
0
E
1
Nd+2
∑
b∈(TdN )∗
(
∇φs(b))2
ds
≤ E[‖hN(0) − hN(0)‖2]. (10.16)
This shows (1).We now take a special φ0: φ0(x) =
∑
b∈CO,xη(b) with the chain CO,x
connecting O and x and with XTdN
-valued random variable η distributed under
µ∇N . Then,
d∑
i=1
EAvT (µ∇,N )[η(ei)2] =
1
Nd
∑
b∈(TdN )∗
1
N2T
∫ N2T
0
E[
(∇φt(b))2]
dt
≤ 2
Nd
∑
b∈(TdN )∗
1
N2T
∫ N2T
0
E
[
(
∇φt(b))2]
dt+ 2
d∑
i=1
Eµ∇N [η(ei)
2]
≤ 4
Tc−
E[‖hN (0)‖2] +E[‖hN(0)‖2]
+ 2d∑
i=1
Eµ∇N [η(ei)
2].
We used the stationarity of µ∇N under the SDE (9.2) on (TdN )∗ for the sec-
ond line and then (10.16) in the third. The last term in the right handside is bounded in N because of the uniform bound (4.17), take u = 0.Therefore, since µN0 satisfies (10.3), the assertion (2) follows if one can showsupN∈N E[‖hN(0)‖2] <∞. To this end we choose the chain CO,x connecting Oand x as follows: First we connect O and (x1, 0, . . . , 0) through changing onlythe first coordinate one by one. Then (x1, 0, 0, . . . , 0) and (x1, x2, 0, . . . , 0) areconnected through changing the second coordinate, etc.. With this choice,
E[‖hN (0)‖2] =1
Nd+2
∑
x∈TdN
E
∑
b∈C0,x
η(b)
2
≤ 1
Nd+2
∑
x∈TdN
dNE
∑
b∈C0,x
η(b)2
≤ C
d∑
i=1
Eµ∇N [η(ei)
2],
which is bounded in N . ut

114 T. Funaki
(b) Method of entropy production
To establish local equilibrium we will essentially follow the route of [175]. Wefirst note that, as pointed out in Sect. 4.1 (with ρ = 0 and Λ replaced by T
dN ),
the generator of the process φt = φt(x);x ∈ TdN is given by
LN =∑
x∈TdN
Lx,
in which Lx are differential operators
Lx := eHN∂
∂φ(x)e−HN
∂
∂φ(x)= ∂2
x − ∂xHN · ∂x,
where HN = HTdN
(φ) is the Hamiltonian defined by (2.1) on TdN and ∂x =
∂/∂φ(x). To write down the generator for the corresponding ∇ϕ-dynamicsηt ≡ ∇φt, which is the solution of the SDE (9.2) on (TdN )∗, we further notethat
∂x = 2∑
b:xb=x
∂
∂η(b)(10.17)
as operators acting on the functions F = F (η) ∈ C2b (XTdN
) of variables ∇φ.Replacing ∂x in the definition of Lx with this formula, we obtain the differ-ential operators
L∇N =
∑
x∈TdN
L∇x ,
L∇x =
∑
b,b′∈(TdN)∗:xb=xb′=x
4∂2
∂η(b)∂η(b′)− 2V ′(η(b′))
∂
∂η(b)
,
for x ∈ TdN . Two operators Lx and L∇
x (and therefore LN and L∇N ) coincide
when they act on C2b (XTdN
). Thus L∇N is the generator corresponding to ηt.
Through integrating by parts its Dirichlet form is given by
−∫
XTdN
FL∇NGdµ
∇N
= 4∑
x∈TdN
∫
XTdN
(
∑
b:xb=x
∂F
∂η(b)
)(
∑
b:xb=x
∂G
∂η(b)
)
dµ∇N , (10.18)
for F,G ∈ C2b (XTdN
). For ν∇ ∈ P(XTdN
) let IN (ν∇) be the entropy produc-tion defined by
IN (ν∇) = −4
∫
XTdN
√
FNL∇N
√
FN dµ∇N ,

Stochastic Interface Models 115
where FN (η) = dν∇/dµ∇N .
In order to apply the argument of [175], it is convenient to extend thedifferential operators on the whole lattice Z
d or on Λ b Zd in the following
manner. Let C2loc,b(X ) be the class of all tame functions F on X of the form
F (η) = F (η(b); b ∈ Λ∗) for some Λ b Zd and F ∈ C2
b (RΛ∗
). We regardL∇x , x ∈ Z
d, the differential operators acting on C2loc,b(X ); the sum in the
right hand side should be taken for b, b′ ∈ (Zd)∗ : xb = xb′ = x. We furtherdefine the differential operator L∇
Λ , Λ b Zd, acting on C2
loc,b(X ) by
L∇Λ =
∑
x∈ΛL∇x .
The next lemma claims that, if the entropy production per unit volume con-verges to 0, the limit measure must be a superposition of µ∇
u ;u ∈ Rd.
Lemma 10.7 Let a sequence µ∇,N ∈ P(XTdN);N ∈ N be given, which is
tight in P(X ) and satisfies
limN→∞
N−dIN (µ∇,N ) = 0. (10.19)
Then, every limit point ν∇ ∈ P(X ) of µ∇,N is a ∇ϕ-Gibbs measure.
Proof. On the infinite lattice we define the entropy production as follows: Forν∇ ∈ P(X ) and Λ b Z
d,
IΛ(ν∇) = −4
∫
X
√
FΛL∇Λ
√
FΛ dµ∇,
where FΛ = dν∇/dµ∇|FΛ∗
and µ∇ = µ∇0 ∈ P(X ) is the ∇ϕ-Gibbs measure
with tilt u = 0. Considering µ∇,N ∈ P(X ), we have
IΛ(µ∇,N ) = sup
−∫
X
L∇ΛG
Gdµ∇,N ; G is positive and FΛ∗- measurable
≤ sup
−∫
XTdN
L∇ΛG
Gdµ∇,N ; G is positive function on X
TdN
=|Λ|Nd
IN (µ∇,N ) = |Λ| × o(1)
as N → ∞ by assumption. Since IΛ is lower semicontinuous, the above boundimplies IΛ(ν∇) = 0 for all weak limits ν∇ in P(X ) of µ∇,N as N → ∞.To show that ν∇ is a ∇ϕ-Gibbs measure, we choose some FΛ∗-measurableG ∈ C2
loc,b(X ). Then
∣
∣
∣
∣
∫
XL∇ΛGdν
∇∣
∣
∣
∣
=
∣
∣
∣
∣
∫
XL∇ΛG · FΛ dµ∇
∣
∣
∣
∣

116 T. Funaki
= 4
∣
∣
∣
∣
∣
∑
x∈Λ
∫
X
(
∑
b:xb=x
∂G
∂η(b)
)(
∑
b:xb=x
∂FΛ∂η(b)
)
dµ∇
∣
∣
∣
∣
∣
≤ 2
√
√
√
√
∑
x∈Λ
∫
X
(
∑
b:xb=x
∂G
∂η(b)
)2
dν∇ ×√
IΛ(ν∇) = 0.
This implies that ν∇|FΛ∗
is stationary under L∇Λ , the generator for the SDE
(9.13) when the boundary condition ξ is fixed. The dynamics defined by (9.13)is ergodic. This can be seen through the diffeomorphism J : XΛ∗,ξ 3 η 7→ φ =
φ(x);x ∈ Λ ∈ RΛ defined by (2.8) and from the fact that the dynamics
for φt = φt(x);x ∈ Λ defined by the SDE (9.15) is ergodic. Its uniquestationary measure is the finite volume ∇ϕ-Gibbs measure µ∇
Λ,ξ ∈ P(XΛ∗,ξ),
cf. Sect. 9.4, which implies the DLR equations for ν∇,
ν∇(·|F(Zd)∗\Λ∗)(ξ) = µ∇Λ,ξ(·), ν∇-a.e. ξ.
This proves that ν∇ is a ∇ϕ-Gibbs measure. ut
(c) Coupled local equilibria
Setu],N(t, x) ≡ (u],N1 (t, x), ..., u],Nd (t, x)) = ∇Nh],N(t, x/N)
for x ∈ TdN and consider the probability measures
pN (dηdu) =1
t
∫ t
0
1
Nd
∑
x∈TdN
1u],N(s,x)∈duµ∇,NN2s τ−1
x (dη) ds
on XTdN× R
d (and therefore on X × Rd by periodic extension). This means,
we have coupled the distribution of the stochastic dynamics and the solutionof the discrete PDE (10.8). Lemmas 10.5 and 10.6-(2) prove
supN∈N
supb∈(Zd)∗
∫
η(b)2 + |u|p pN(dηdu) <∞ (10.20)
for some p > 2. In particular, pN ;N ∈ N is tight in P(X × Rd) and, con-
sequently, one can choose from an arbitrary sequence N ′ → ∞ a subsequenceN ′′ → ∞ such that pN
′′
(dηdu) converges weakly on X × Rd to some p(dηdu)
as N ′′ → ∞.To characterize p, the following entropy bound is imposed on the initial
distributions µ∇,N0 ,
limN→∞
N−(d+2)HN (µ∇,N0 ) = 0. (10.21)
This condition will be removed later. Here HN (ν∇) ≡ H(ν∇|µ∇N ) denotes the
relative entropy of ν∇ ∈ P(XTdN
) with respect to µ∇N , recall (5.4).

Stochastic Interface Models 117
Proposition 10.8 Under the condition (10.21), there exists λ ∈ P(Rd×Rd)
such that p can be represented in the form
p(dηdu) =
∫
v∈Rd
µ∇v (dη) λ(dvdu).
Proof. For G = G(u) ∈ Cb(Rd) and p(dηdu) ∈ P(X ×R
d) we shall denote theintegration of G with respect to p(dηdu) in u by p(dη,G) ∈ M(X ); the classof all signed measures on S having finite total variations is denoted by M(S).The subsequence N ′′ is simply denoted by N .
First we note that p(dη,G) is shift invariant for every G ∈ Cb(Rd). In fact,
this can be shown by Lemma 10.5 first for G ∈ C1b (R
d) and then for generalG by approximation.
We next show that, for every G ∈ Cb(Rd), p(dη,G) has a representation
p(dη,G) =
∫
Rd
µ∇v (dη)λ(dv,G) (10.22)
with some λ(dv,G) ∈ M(Rd). Set pN(dη,G) := pN(dη,G)/∫
X pN (dη,G) ∈
P(X ) for G ≥ c > 0. Then, since G > 0 and the entropy production IN (ν∇)is convex in ν∇, we have
IN (pN ) ≤ ‖G‖∞ct
∫ t
0
IN (µ∇,NN2s ) ds
=‖G‖∞ctN2
HN (µ∇,N0 ) −HN (µ∇,N
N2t )
.
The second line is shown by noting that FN (t) = dµ∇,Nt /dµ∇
N is the solutionof the forward equation ∂FN (t)/∂t = L∇
NFN (t) and then using (10.18). Since
HN (µ∇,NN2t ) ≥ 0, we conclude from the assumption (10.21) that pN ;N ∈ N
satisfies the condition (10.19) and therefore Lemma 10.7 shows that its weaklimit p(·, G) = p(·, G)/
∫
X p(dη,G) is a ∇ϕ-Gibbs measure. However, p(·, G)is shift invariant as we have seen above and p(·, G) ∈ P2(X ) by using (10.20).Hence p(·, G) ∈ G∇ and consequently we see from Corollary 9.6
p(·, G) =
∫
Rd
µ∇v (·) λ(dv,G)
for some λ(·, G) ∈ P(Rd). Thus we have obtained (10.22) for uniformly pos-itive G ∈ Cb(R
d) by taking λ(dv,G) =∫
X p(dη,G) × λ(dv,G). It also holdsfor general G.
The final task is to show that λ(dv,G) in (10.22) is represented as
λ(dv,G) =
∫
Rd
G(u) λ(dvdu)
for every G ∈ Cb(Rd) with some λ ∈ P(Rd × R
d). To this end, one can applyBirkhoff’s individual ergodic theorem for µ∇
v , and then Stone-Weierstrass’stheorem ([255], p.121) and Riesz-Markov’s theorem ([255], p.111). The detailsare omitted. ut

118 T. Funaki
10.4 Proof of Theorem 10.1
We compare the solution of the SDE with that of a discretized version of thePDE. Recalling the definition of h],N(t) from Sect. 10.2-(b), we have
E[
‖h(t) − hN (t)‖2]
≤ 2‖h(t)−h],N(t)‖2+2E[
‖h],N(t) − hN (t)‖2]
. (10.23)
The first term refers to the PDE only. In Lemma 10.4-(2) we proved that itconverges to zero in the limit N → ∞ under additional uniform bound on∇Nh],N0 . But this assumption can be easily removed by approximating theinitial data h0 ∈ L2(Td) with smooth functions. In this subsection only thesecond term is handled. We first assume the entropy bound (10.21), which isactually removable.
By a straightforward computation of the L2-norm using Ito’s formula
E[‖h],N(t) − hN (t)‖2]
= E
1
Nd
∑
x∈TdN
(h],N (t, x/N) −N−1φN2t(x))2
(10.24)
= E[‖h],N(0) − hN(0)‖2] − 2
∫ t
0
(IN1 (s) − IN2 (s) − IN3 (s) + IN4 (s)) ds,
where
IN1 (s) =1
Nd
∑
x∈TdN
d∑
i=1
σ′i(u
],N(s, x))u],Ni (s, x),
IN2 (s) =1
Nd
∑
x∈TdN
d∑
i=1
σ′i(u
],N(s, x))E[∇iφN2s(x)],
IN3 (s) =1
Nd
∑
x∈TdN
d∑
i=1
u],Ni (s, x)E[V ′(∇iφN2s(x))],
IN4 (s) =1
Nd
∑
x∈TdN
d∑
i=1
E[∇iφN2s(x)V′(∇iφN2s(x))] − 1.
Recall u],N(s, x) = ∇Nh],N (s, x/N). With the notation pN(dηdu), these termscan be rewritten as
∫ t
0
INk (s) ds = t
∫
X×Rd
fk(η, u) pN (dηdu),
for k = 1, 2, 3, 4, where

Stochastic Interface Models 119
f1(η, u) =
d∑
i=1
uiσ′i(u), f2(η, u) =
d∑
i=1
η(ei)σ′i(u),
f3(η, u) =
d∑
i=1
V ′(η(ei))ui, f4(η, u) =
d∑
i=1
η(ei)V′(η(ei)) − 1.
One can pass to the limit for the first three terms, where the limit N ′′ → ∞should be taken along the subsequence N ′′ chosen in Sect. 10.3-(c),
limN ′′→∞
∫ t
0
IN′′
k (s) ds = t
∫
X×Rd
fk(η, u) p(dηdu), (10.25)
for k = 1, 2, 3. Indeed, noting that |∇σ(u)| ≤ C(1 + |u|) and |V ′(η(ei))| ≤C(1 + |η(ei)|), we see
|f1(η, u)|p/2 ≤ C(1 + |u|p), p/2 > 1,
|f2(η, u)|q + |f3(η, u)|q ≤ C
(
1 + |u|p +
d∑
i=1
|η(ei)|2)
,
for q = 2p/(2+p) > 1. Therefore fk(η, u), k = 1, 2, 3, are uniformly integrablewith respect to the probability measures pN ;N ∈ N because of the uniformbound (10.20). Since pN
′′
converges weakly to p, we obtain (10.25). For thefourth term, since ηV ′(η) ≥ c−η2 ≥ 0 (η ∈ R), one can apply Fatou’s lemmato obtain
lim supN ′′→∞
(
−∫ t
0
IN′′
4 (s) ds
)
≤ −t∫
X×Rd
f4(η, u) p(dηdu). (10.26)
Summarizing (10.25), (10.26) and together with Proposition 10.8, Theorem5.5, we have proved that
lim supN ′′→∞
[
−∫ t
0
(IN′′
1 (s) − IN′′
2 (s) − IN′′
3 (s) + IN′′
4 (s)) ds
]
≤ t
∫
R2d
−u · ∇σ(u) + v · ∇σ(u) + u · ∇σ(v) − v · ∇σ(v) λ(dvdu)
= −t∫
R2d
(u− v) · (∇σ(u) −∇σ(v)) λ(dvdu) ≤ 0. (10.27)
The convexity of σ implies the nonpositivity of the last integral. This holdsfor some subsequence N ′′ → ∞ of arbitrarily taken sequence N ′ → ∞.Hence, going back to (10.24), we have without taking subsequence
limN→∞
E[
‖h],N(t) − hN (t)‖2]
= 0. (10.28)
Finally, from (10.23) we conclude Theorem 10.1 under the auxiliary entropyassumption (10.21).

120 T. Funaki
However, the entropy assumption can be removed. The idea originally ob-served by Lu [226] is, roughly saying, that after a short time (macroscopicallyof order O(N−2)) the system gains the entropy bound. The details are omit-ted. ut
Remark 10.3 (1) The technique employed for the proof of Theorem 10.1is called H−1-method, since the L2-norms for the height variables can be re-garded as the H−1-norms for the height differences. This method was proposedby Chang and Yau [63] to establish the nonequilibrium fluctuation for the firsttime. It has an advantage to skip the so-called 2-blocks’ estimate. As we haveseen, the 1-block estimate follows from the three steps: (a) showing that limitmeasures have entropy production 0, (b) 0-entropy production implies the ∇ϕ-Gibbs property, and (c) characterization of all ∇ϕ-Gibbs measures. Indeed, inSect. 9, we have characterized all stationary measures for the infinite volume∇ϕ-dynamics (Theorem 9.3), which is stronger result than (c). Under suchsituation, the proof of 1-block estimate can be simplified, in particular, oneneed not rely on the entropy production, see [257], [274], [145].(2) Under different setting, Abraham et al. [2] discussed the dynamics withboundary conditions related to the wetting transition. They observed the in-terfaces sideways and proved that the wetting transition occurs depending onthe strength of the potential V . See also [67]. For lattice gasses, the boundaryconditions were discussed by [110], [200].(3) From the view point of the nonlinear PDE theory, Giga and Giga [171],[172] studied the case where the surface tension has anisotropy and singularity.
10.5 Surface diffusion
So far, we have been considering the dynamics (2.9) (or, equivalently (2.11)-(2.13) or (10.1)) associated with the HamiltonianH in the sense that they havethe ϕ-Gibbs measures as their equilibrium states. Indeed, one can introducevarious types of dynamics having such properties. For instance, let A be a(nonnegative) operator acting on the spatial variable x and consider the SDEs
dφt(x) = −A ∂H
∂φ(x)(φt)dt+
√2Adwt(x), (10.29)
for x ∈ Γ . Then, at least formally, φt is reversible under the ϕ-Gibbs measureson Γ . This can be seen by writing down the corresponding generator andchecking that it is symmetric under the ϕ-Gibbs measures. See Hohenbergand Halperin [183] for the physical background for the SDEs (10.29). Thedynamics (2.9) are the special case that A = I (identity map).
Let us, in particular, take A = −∆. Then, (10.29) can be rewritten as

Stochastic Interface Models 121
dφt(x) =∑
y:|x−y|=1
∑
z:|z−y|=1
V ′(φt(y) − φt(z))
−∑
z:|z−x|=1
V ′(φt(x) − φt(z))
dt
+√
2dwt(x), (10.30)
for x ∈ Γ , where wt(x);x ∈ Γ are Gaussian processes with mean 0 andcovariance
E[wt(x)ws(y)] = −∆(x, y) · t ∧ s,which is a precise realization of
√−∆wt(x). ∆(x, y) is the kernel of the discrete
Laplacian ∆.The SDEs (10.30) on the lattice torus Γ = T
dN have, contrarily to the
dynamics (2.9), the conservation law (at microscopic level):
∑
x∈TdN
φt(x) =∑
x∈TdN
φ0(x),
for t > 0. Indeed, taking the sum in x, the drift term in (10.30) cancels out and,moreover,
∑
x∈TdNwt(x) = 0 holds. The sum
∑
x∈TdNφt(x) represents the total
volume of the phase below the interface. The dynamics determined by (2.9) donot have such property. In this sense, the time evolutions defined by (2.9) and(10.30) may correspond to the Glauber and Kawasaki dynamics, respectively,in particles’ systems. The SDEs (10.30) are sometimes adopted as a model foralloys, since the total numbers of atoms of two kinds of metals are preserved,respectively, under the time evolution. Because of such conservation law, onemay think of that the atoms move around only over the surface separatingtwo phases. Thus the model is called the surface diffusion, see [274] for details.
Nishikawa [238] introduced the macroscopic scaling
hN (t, θ) =∑
x∈TdN
1
NφN4t(x)1B(x/N,1/N)(θ), (10.31)
for θ ∈ Td and the solution φt = φt(x);x ∈ T
dN of (10.30) on the lattice
torus and proved the following theorem. The potential V satisfies the basicconditions (V1)-(V3) in (2.2).
Theorem 10.9 Assume that hN (0) satisfies two conditions
limN→∞
E[‖hN (0) − h0‖2H−1(Td)] = 0,
supNE[‖hN (0)‖2
L2(Td)] <∞,
for some h0 ∈ L2(Td). Then, for every t > 0,

122 T. Funaki
limN→∞
E[‖hN (t) − h(t)‖2H−1(Td)] = 0
holds and the limit h(t) = h(t, θ) is a unique weak solution of the nonlinearPDE
∂h
∂t(t, θ) = −∆ [div (∇σ)(∇h(t, θ))]
≡ −d∑
i,j=1
∂2
∂θ2j
∂
∂θi
∂σ
∂ui(∇h(t, θ))
, θ ∈ Td, (10.32)
having initial data h0, where H−1(Td) stands for the Sobolev space over Td
equipped with the standard norm ‖ · ‖H−1(Td) and σ = σ(u) is the normalizedsurface tension as before.
Compared with the scaling (10.2) for the case without conservation law,the space-time scaling ratio is N : N 4 in (10.31). The limit equation (10.32)is of fourth order. For instance, when the potential is quadratic V (η) = 1
2η2,
we easily see that the scaling is proper and the limit equation is of the form
∂h
∂t= −∆2h.
The space-time scaling ratio is closely related to the spectral gap of the gener-ator corresponding to the process φt = φt(x);x ∈ T
dN. The gap behaves as
O(1/N2) as N → ∞ for the dynamics (10.1), while it behaves as O(1/N 4) for(10.30). In other words, the system with conservation law requires longer timeto relax to the equilibrium state. These gaps are seen from the logarithmicSobolev inequalities, which are obtained based on the theory of Bakry andEmery [14] noting that our potential V is convex. Compare with the results[227], [159], [213] for particles’ systems.
The proof of Theorem 10.9 is similar to that of Theorem 10.1, but basedon the H−2-method rather than H−1-method since the basic norms change.The main task is again the characterization of all ∇ϕ-Gibbs measures corre-sponding to the dynamics (10.30) on Γ = Z
d. Under the conservation law,such Gibbs measures should be called the canonical ∇ϕ-Gibbs measures. Un-fortunately, the method of energy inequality developed in Sect. 9.3 does notwork well for conservative system. Instead, Nishikawa proved that the classof canonical ∇ϕ-Gibbs measures and that of ∇ϕ-Gibbs measures for non-conservative system coincide under the shift invariance. Thus one can applyCorollary 9.6 to characterize the canonical ∇ϕ-Gibbs measures.
In Sect. 10.1-(d), we notified that the macroscopic interface equation (10.4)is nothing but the gradient flow for the total surface tensionΣ. The basic spacewas L2(Td) there and the Frechet derivatives were computed on this space.For the conservative system, the basic space should be replaced with H−1(Td)and the Frechet derivative δΣ/δh(θ) of Σ must be computed on this space,i.e.,

Stochastic Interface Models 123
d
dεΣ(h+ εg)
∣
∣
∣
∣
ε=0
=
(
δΣ
δh, g
)
H−1
,
for every g ∈ C∞(Td), where the inner product is defined by (f, g)H−1 =((−∆)−1f, g)L2 . Thus we have
δΣ
δh(θ)= ∆ [div (∇σ)(∇h(θ))]
and therefore the limit equation (10.32) is again the gradient flow for Σ andhas the form
∂h
∂t(t) = − δΣ
δh(h(t)).
The derivation of the motion by mean curvature from bistable reaction-diffusion equations (sometimes called Allen-Cahn equation) via singular limitis extensively studied in recent years in nonlinear PDE theory, see [240] andalso Sect. 18.3. The conservative system is described by the fourth order PDEcalled Cahn-Hilliard equation. The interfacial equation (10.32) derived heremight coincide with the equation derived from Cahn-Hilliard type equationvia singular limit. See Visintin [289] for various approaches to the problemsrelated to the phase transitions from the view point of PDE theory.
Bertini et al. [23] derived fourth order PDE via hydrodynamic limit. Thelimit equation is the same as (10.32) in Theorem 10.9 in one dimension. How-ever, in higher dimensions, the equilibrium measures of the model treated by[23] are Bernoulli product measures, while they have long correlations for themodel discussed here. Therefore, these two results are essentially different.

124 T. Funaki
11 Equilibrium fluctuation
Let φt(x);x ∈ Zd be the solution of the SDEs (2.13) with initial data φ0
whose gradients ∇φ0 are distributed according to the ∇ϕ-pure phase µ∇u for
some u ∈ Rd. Note that the process ηt ≡ ∇φt is in equilibrium. Consider an
S ′(Rd)-valued process
ΨNi (t, dθ) = N−d/2∑
x∈Zd
(∇iφN2t(x) − ui) δx/N (dθ), θ ∈ Rd,
for each 1 ≤ i ≤ d. The potential V satisfies the conditions (V1)-(V3).
Theorem 11.1 (Fluctuation-dissipation theorem, [169]) The processΨNi (t) weakly converges as N → ∞ in the space C([0,∞),S ′(Rd)) to an equi-librium solution Ψi(t) of the stochastic PDE
∂Ψi∂t
(t, θ) = −AΨi(t, θ) +√
2∂B
∂θi(t, θ),
where B(t, θ) is the space-time white noise and
A = −d∑
i,j=1
qi,j∂2
∂θi∂θj.
The positive definite d × d matrix (qi,j) ≡ (qi,j(u)) is characterized by thevariational formula:
v · qv =2 infF
d∑
i=1
Eµ∇u[
(ui −DiF (η))2V ′′(η(ei))]
+∑
x∈Zd
Eµ∇u [(∂xF )2]
, (11.1)
where v ∈ Rd, the infimum is taken over all F = F (η) ∈ C∞
loc,b(X ), DiF (η) =F (τeiη) − F (η), τei : X → X is shift and ∂xF (η) is defined by (10.17).
The proof relies on the Helffer-Sjostrand type representation for correla-tion functions of the process ηt ≡ ∇φt in terms of random walk in movingrandom environment. Such representation is also used in [237] (see Sect. 8)for static correlation functions. Then the problem is reduced to establishingthe homogenization for this random walk, cf. [202].
Remark 11.1 Theorem 11.1 covers the static CLT discussed in Sect. 8.
Problem 11.1 ([169]) If σ ∈ C2(Rd) (see Problem 5.1), does the covariancematrix q(u) = (qi,j(u)) appearing in CLT coincide with the Hessian of σ(u)?Recall that σ(u) arises in LLN and LDP in various manner. Such identityis ordinary in statistical mechanics, for instance if the Gibbs measures haveexponentially fast mixing property.

Stochastic Interface Models 125
12 Dynamic large deviation
12.1 Dynamic LDP
The hydrodynamic limit is the LLN for the macroscopic height variables hN (t)defined in (2.17). In this section we study the corresponding LDP on thelattice torus T
dN . We always assume the conditions (V1)-(V3) in (2.2) on
the potential V . The result is the following: Assume that the initial dataφ0(x) ≡ φN0 (x);x ∈ T
dN of the SDEs (10.1) are deterministic and satisfy
supN
|φN0 (O)| + 1
Nd
∑
b∈(TdN )∗
(∇φN0 (b))2
<∞. (12.1)
We also assume the condition (10.3) without taking expectations for the cor-responding hN (0) and some h0 ∈ L2(Td).
Theorem 12.1 (Dynamic LDP, Funaki and Nishikawa [154] on Td) The
LDP holds for hN(t); t ∈ [0, T ] with speed Nd and rate functional IT (h):
P(
hN (t) ∼ h(t), t ≤ T)
N→∞
exp−NdIT (h),
where h(t) = h(t, θ) is a given motion of surface. More precisely, for everyclosed set C and open set O of C([0, T ], L2
w(Td)), we have that
lim supN→∞
1
NdlogP (hN (·) ∈ C) ≤ − inf
h∈CIT (h), (12.2)
lim infN→∞
1
NdlogP (hN (·) ∈ O) ≥ − inf
h∈OIT (h), (12.3)
where L2w(Td) is the space L2(Td) equipped with the weak topology and
C([0, T ], L2w(Td)) stands for the class of all continuous functions h : [0, T ] →
L2w(Td). The precise form of rate functional IT (h) ≡ IT (h(·)) is stated in the
subsequent section.
12.2 Dynamic rate functional
For each h = h(t, θ) which is differentiable,
IT (h) =1
4
∫ T
0
dt
∫
Td
∂h
∂t(t, θ) − div[(∇σ)(∇h(t, θ))]
2
dθ, (12.4)
if h(0) = h0 and IT (h) = +∞ if h(0) 6= h0, where σ is the normalizedsurface tension. More precisely saying, for h ∈ C([0, T ], L2
w(Td)) satisfyingh(t) ∈ H1(Td) for a.e. t ∈ [0, T ]
IT (h) = supJ=J(t,θ)∈C1([0,T ]×Td)
IT (h; J),

126 T. Funaki
where
IT (h; J) =
∫
Td
J(T, θ)h(T, θ) dθ −∫
Td
J(0, θ)h0(θ) dθ
−∫ T
0
dt
∫
Td
∂J
∂t(t, θ)h(t, θ) dθ
+
∫ T
0
dt
∫
Td
∇J(t, θ) · ∇σ(∇h(t, θ)) dθ −∫ T
0
dt
∫
Td
J2(t, θ) dθ,
and H1(Td) denotes the Sobolev space on Td.
The upper bound in Theorem 12.1 is shown based on the exponentialChebyshev’s inequality, while for the lower bound hydrodynamic limit forweakly perturbed system is established and then Girsanov’s formula is ap-plied. These ideas are rather standard. Essential role is played by the super-exponential estimate, namely the probability of replacing sample mean overbox of side length Nε with ensemble mean is superexponentially small asN → ∞ and then ε ↓ 0. The H−1-method is effectively used to prove suchestimate.
Remark 12.1 In one dimension, Theorem 12.1 was proved by Donsker andVaradhan [96]. See also [201], [214] for LDPs corresponding to the hydrody-namic limit.
12.3 Relation to the static LDP
Let µψN ≡ µψDN be the finite volume ϕ-Gibbs measure (2.4) on DN withboundary condition ψ satisfying the conditions (6.7). Then, Theorem 6.1 withU ≡ 0 shows the LDP for macroscopic height variables hN = hN(θ); θ ∈ Ddistributed under µψN and the rate functional is given by the total surfacetension ΣD(h) in (6.2).
Going back to the torus, since the distribution of ∇NhN (T ) weakly con-verges as T → ∞ to the macroscopically scaled ∇ϕ-field under the finite vol-ume ∇ϕ-Gibbs measure on T
dN , one would expect that the static LDP could
be recovered from the dynamic LDP. An affirmative answer is not known atpresent, however one can at least recover the static rate functional from thedynamic one as T → ∞. In fact, denoting the distribution of hN (T ) by µN (T ),the contraction principle implies the LDP for µN(T )N with rate functional
ST (h) = inf
IT (h); h = h(t, θ) s.t. h(T, θ) = h(θ)
for h = h(θ) ∈ H1(Td). The relationship between ST (h) and the total surfacetension ΣTd(h) on the torus (defined by (6.2) with D = T
d) is stated in thefollowing proposition.
Proposition 12.2limT→∞
ST (h) = ΣTd(h).

Stochastic Interface Models 127
The limit in the left hand side is called a quasi-potential and the corre-sponding classical flow is a gradient flow for the potential Σ as pointed outin Sect. 10.1. In such case the quasi-potential coincides with the potential Σitself. The infimum is attained by the reversed trajectory of the gradient flow.

128 T. Funaki
13 Hydrodynamic limit on a wall
Under the static situation, several modifications were made to the Hamiltonianand the corresponding ϕ-Gibbs measures. We have considered, for instance,wall effect by conditioning φ ≥ 0, two media system by introducing weak selfpotentials and pinning effect near the height level 0. The associated dynamicscan be constructed in such a manner that they are reversible under the mod-ified ϕ-Gibbs measures. In the following sections, we discuss the problems ofhydrodynamic limit and fluctuations for such dynamics. Entropic repulsion isalso studied.
13.1 Dynamics on a wall
The dynamics for the microscopic interfaces φt = φt(x);x ∈ Γ on a wallare introduced by SDEs of Skorokhod type:
dφt(x) = − ∂H
∂φ(x)(φt) dt+
√2dwt(x)
+1
Nf
(
t
N2,x
N,
1
Nφt(x)
)
dt+ d`t(x), x ∈ Γ, (13.1)
subject to the conditions
φt(x) ≥ 0, `t(x) , `0(x) = 0 and
∫ ∞
0
φt(x)d`t(x) = 0, (13.2)
for each x ∈ Γ , where ∂H/∂φ(x) is defined as in (2.10), wt = wt(x);x ∈ Γis a family of independent one dimensional standard Brownian motions andf = f(t, θ, h) is a given macroscopic external force, for instance, a mild pinningeffect on the interfaces from the wall. The interfaces can move over the wallsettled at height level 0 so that the height variables always satisfy φt(x) ≥ 0.The condition “`t(x) ” means that `t(x) called local time of φt(x) at 0 isnondecreasing in t and the last condition in (13.2) implies that `t(x) increasesonly when φt(x) = 0. In particular, d`t(x) = 0 if φt(x) > 0 and d`t(x)represents a strong repelling force from the wall when the interfaces touchit. The external force f is microscopically scaled in the equation (13.1) tohave nontrivial macroscopic limit, see Theorem 13.1. If f = f(t, θ, h) is jointlycontinuous in these three variables and Lipschitz continuous in h, then theSDEs (13.1) subject to (13.2) (and with boundary conditions (2.12)) have aunique solution, see [280], [223].
The unique stationary measure of the dynamics determined by (13.1)-(13.2) when f = 0 and Γ = DN with 0-boundary conditions is given byµ0DN
( · |φ ≥ 0), the conditional probability of the finite volume ϕ-Gibbs mea-sure µ0
DN. This measure is reversible under the dynamics.

Stochastic Interface Models 129
13.2 Hydrodynamic limit
In the next theorem, we work on the lattice torus Γ = TdN and assume the
following conditions on f
(E1) f ∈ C1([0,∞) × Td × [0,∞)),
(E2) there exist constants C > 0 and κ ∈ (0, 1) such that
|f(t, θ, h)| +∣
∣
∣
∣
∂f
∂θi(t, θ, h)
∣
∣
∣
∣
+
∣
∣
∣
∣
∂f
∂t(t, θ, h)
∣
∣
∣
∣
≤ C(1 + |h|κ),
for 1 ≤ i ≤ d and
− C ≤ ∂f
∂h(t, θ, h) ≤ 0,
for every (t, θ, h) ∈ [0,∞) × Td × [0,∞).
The condition (E2) means the sublinear growth and nonincreasing propertyof f in h.
Theorem 13.1 (Hydrodynamic limit, Funaki [148] on Td) As N → ∞,
the macroscopic height variables hN(t, θ) defined by (2.17) converge to h(t, θ)in probability, i.e., for every ϕ ∈ H = L2(Td) and t, δ > 0,
limN→∞
P(
|(hN (t), ϕ) − (h(t), ϕ)| > δ)
= 0,
if this condition holds at t = 0 and if supNE[‖hN (0)‖2H ] <∞. The limit h(t, θ)
is a unique solution of the evolutionary variational inequality(MMC withreflection (obstacle)):
h ∈ L2(0, T ;V ),∂h
∂t∈ L2(0, T ;V ′), ∀T > 0, (a)
(
∂h
∂t(t), h(t) − v
)
+ (∇σ(∇h(t)),∇h(t) −∇v)
≤ (f(t, h(t)), h(t) − v) , a.e. t, ∀v ∈ V : v ≥ 0, (b)
h(t, θ) ≥ 0, a.e., (c)
h(0, θ) = h0(θ), (d)
where V = H1(Td), V ′ = H−1(Td) and (·, ·) denotes the inner product of H(or Hd) or the duality between V ′ and V .
Note that, if h(t, θ) > 0, the condition (b) implies that h(t) satisfies thePDE (10.4) with external force f (roughly saying, by taking v = h(t) + εv forsufficiently small ε and v ∈ V ):
∂h
∂t(t, θ) = div (∇σ)(∇h(t, θ)) + f(t, θ, h(t, θ)).

130 T. Funaki
The evolutionary variational inequality (EVI) describes the strong repellingeffect from the wall when the macroscopic interfaces touch it, i.e., h(t, θ) = 0.
The proof of Theorem 13.1 is completed based on the penalty method,comparison theorem on SDEs, superexponential 1-block and 2-blocks’ esti-mates, tightness argument from energy inequality and results on the EVI dueto Bensoussan and Lions [21].
Remark 13.1 Rezakhanlou [258], [259] derived a Hamilton-Jacobi equationunder hyperbolic scaling from growing SOS dynamics (φ(x) ∈ Z) with con-straints on the gradients (e.g., ∇φ(x) ≤ v). Related results were obtained byEvans and Rezakhanlou [107] and Seppalainen [264].
14 Equilibrium fluctuation on a wall
14.1 The case attached to the wall
Let us consider the equilibrium dynamics φt on the wall in one dimension, i.e.,φt is a solution of the SDEs (13.1)-(13.2) with d = 1, Γ = 1, 2, . . . , N−1, f =0 under the 0-boundary conditions:
φt(0) = φt(N) = 0 (14.1)
and with an initial distribution µ+,0Γ ≡ µ0
Γ ( · |φ ≥ 0). Macroscopic fluctua-tion field around the hydrodynamic limit h(t, θ) = 0 is defined by
ΦN (t, θ) =√NhN (t, θ)
=∑
x∈Γ
1√NφN2t(x)1[ xN− 1
2N ,xN+ 1
2N )(θ), θ ∈ [0, 1].
Since ΦN (t, θ) ≥ 0, the limit is certainly non-Gaussian if it exists and theresult must be different from the usual CLT. In fact, we have the followingtheorem.
Theorem 14.1 (Equilibrium fluctuation, Funaki and Olla [155]) As N →∞, ΦN (t, θ) weakly converges to Φ(t, θ) on the space C([0, T ], H−α([0, 1])) ∩L2w([0, T ] × [0, 1]) for every T > 0 and α > 1/2. The limit Φ(t, θ) is a
unique weak stationary solution of the stochastic PDE with reflectionof Nualart-Pardoux type:
∂Φ
∂t(t, θ) = q
∂2Φ
∂θ2(t, θ) +
√2B(t, θ) + ξ(t, θ), θ ∈ [0, 1],
Φ(t, θ) ≥ 0,
∫ ∞
0
∫ 1
0
Φ(t, θ) ξ(dtdθ) = 0,
Φ(t, 0) = Φ(t, 1) = 0, ξ: random measure,

Stochastic Interface Models 131
where H−α([0, 1]) is the Sobolev space on [0, 1] determined from Dirichlet 0-boundary conditions, B(t, θ) is the space-time white noise, q = 1/〈η2〉ν0(=1/u′(0)) and ν0 ∈ P(R) is defined by (5.25) with λ = 0.
The proof is based on the penalization, i.e., we replace the terms of thelocal times `t(x) with strong positive drifts when the interfaces try to movetoward the negative side. This replacement gives the lower bound for theSDEs (13.1)-(13.2) by comparison theorems. Therefore the equilibrium fluc-tuation result for the SDEs with penalization, which is established throughthe so-called Boltzmann-Gibbs principle, gives the lower estimate for the limitΦ(t, θ). On the other hand, to obtain the upper bound for Φ(t, θ), since we areconcerned with the equilibrium situation, once the dynamic lower bound isestablished, one only needs to show the static upper bound. Indeed, it is notdifficult to prove that the stationary measure µ+,0
Γ weakly converges under thescaling of our interest to the distribution of (properly time changed) threedimensional pinned Bessel process, which is the stationary measure ofthe SPDE of Nualart-Pardoux type.
14.2 The case away from the wall
In the last subsection, we have discussed under the 0-boundary conditions(14.1). Then the macroscopic heights hN (t, θ) converges to 0 and, in thissense, the interfaces are attached to the wall at the macroscopic level.
Here, taking a, a > 0, let us consider the SDEs (13.1)-(13.2) under thepositive boundary conditions
φt(0) = aN, φt(N) = aN. (14.2)
The initial distribution is taken as µ+,aN,aNΓ ≡ µaN,aNΓ (·|φ ≥ 0), the finite
volume ϕ-Gibbs measure on Γ = 1, 2, . . . , N − 1 with boundary conditionsaN and aN at x = 0 and N , respectively, conditioned to be φ ≥ 0. Then thesystem is stationary and reversible. Since the limit of hN (t, θ) as N → ∞ isgiven by
h(θ) = a+ (a− a)θ, θ ∈ [0, 1],
the fluctuation field is defined by
ΦN (t, θ) =√N(
hN (t, θ) − h(θ))
.
Theorem 14.2 ([155]) As N → ∞, ΦN (t, θ) weakly converges to Φ(t, θ) onthe space C([0, T ], H−α([0, 1])) ∩ L2
w([0, T ] × [0, 1]) for every T > 0 and α >1/2. The limit Φ(t, θ) is a unique weak stationary solution of the stochasticPDE:
∂Φ
∂t(t, θ) = qa−a
∂2Φ
∂θ2(t, θ) +
√2B(t, θ), θ ∈ [0, 1],
Φ(t, 0) = Φ(t, 1) = 0,
where qu = 1/u′(λ) with λ = λ(u), see Sect. 5.5.

132 T. Funaki
Intuitively saying, since the fluctuation of the interfaces is of O(√N), they
do not feel the effect from the wall under the boundary conditions (14.2) sothat the limit of the fluctuation fields becomes Gaussian contrary to the casestudied in Theorem 14.1.
Problem 14.1 In higher dimensions, the expected scaling for the fluctuationfield might be
Nd/2(
hN (t, θ) −E[hN (t, θ)])
,
i.e., the order of the fluctuation for the ϕ-field is expected to be of O(N−d/2+1).Compare this with the results in entropic repulsion and then you see that thefluctuation is much smaller than the order of the mean E[hN (θ)] except whend = 1. The fluctuation field accordingly may not feel the wall and the limitmight be Gaussian even under the 0-boundary conditions when d ≥ 2.
15 Dynamic entropic repulsion
Deuschel and Nishikawa [87], Dunlop et al. [100], Ferrari et al. [112].
16 Hydrodynamic limit in two media
Let us consider the microscopic dynamics associated with the Hamiltonian(6.3) having a weak self potential in one dimension, i.e., let φt = φt(x); 0 ≤x ≤ N be the solution of the SDEs
dφt(x) = − ∂H
∂φ(x)(φt) dt+
√2dwt(x) − f(φt(x))dt,
for 1 ≤ x ≤ N − 1 with the boundary conditions
φt(0) = aN, φt(N) = bN,
where f(r) = W ′(r); we assume Q ≡ 1 so that U(θ, r) = W (r) for simplicity.Then the following theorem is expected, but the proof is incomplete at thismoment so it should be considered as a conjecture.
Theorem 16.1 (Funaki [151]) Assume a ≥ 0 ≥ b and A =∫
Rf(r)dr ≥ 0.
Then, as N → ∞, the macroscopically scaled height variable hN (t, θ) con-verges to h(t, θ) in probability. The limit h(t, θ) is a solution of the freeboundary problem for the nonlinear PDE (10.4)
∂h
∂t(t, θ) =
∂
∂θ
σ′(
∂h
∂θ(t, θ)
)
on (t, θ);h(t, θ) 6= 0,
Ψ(h′+(t, θ)) − Ψ(h′−(t, θ)) = A on (t, θ);h(t, θ) = 0,h(t, 0) = a, h(t, 1) = b,
where Ψ(u) = σ′(u)u − σ(u) and, h′+(θ) and h′−(θ) are derivatives of h at θfrom the positive and negative sides of h, respectively.

Stochastic Interface Models 133
The above mentioned free boundary problem was studied by Caffarelli etal. [49], [50], [51].
17 Pinning dynamics on a wall
This section is taken from unpublished notes based on a discussion with J.-D. Deuschel. We construct the dynamics of microscopic interfaces under theeffects of pinning and repulsion, and discuss their reversibility.
Dynamics without volume conservation law
Let Λ b Zd be given. For nonnegative height variables φ = φ(x);x ∈ Λ ∈ R
Λ+
on Λ, the Hamiltonian H(φ) ≡ HψΛ (φ) with boundary conditions φ(x) =
ψ(x) ≥ 0, x ∈ ∂+Λ was introduced in (2.1). We consider the SDEs for φt =φt(x);x ∈ Λ
dφt(x) = −1(0,∞)(φt(x))∂H
∂φ(x)(φt)dt
+ 1(0,∞)(φt(x)) ·√
2dwt(x) + d`t(x), x ∈ Λ, (17.1)
subject to the conditions:
(a) φt(x) ≥ 0, `t(x) , `0(x) = 0,
(b)
∫ ∞
0
φt(x) d`t(x) = 0, (17.2)
(c) c`t(x) =
∫ t
0
10(φs(x)) ds,
for every x ∈ Λ. We shall choose c = eJ(≥ 0) for J ∈ [−∞,∞). The boundaryconditions (2.12) at y ∈ ∂+Λ is automatically imposed through the Hamilto-
nian HψΛ .
The first basic problems we should address are (1) construction anduniqueness of dynamics and (2) identification of invariant or reversible mea-sures. For the problem (1) we refer to [184], [276], [279]. The case of Λ = Z
d
should also be considered.
Reversibility
Set Ω+(Λ) = RΛ+ and let µψ,J,+Λ ∈ P(Ω+(Λ)) be the finite volume ϕ-Gibbs
measure with hard wall and δ-pinning defined by (7.13) (with DN replacedby Λ and with boundary condition ψ), i.e.,
µψ,J,+Λ (dφ) =1
Zψ,J,+Λ
e−HψΛ (φ)
∏
x∈Λ
(
cδ0(dφ(x)) + dφ+(x))
,

134 T. Funaki
where c = eJ and dφ+(x) stands for the Lebesgue measure on R+. We denote
A(φ) = x ∈ Λ;φ(x) = 0,
and
B(φ) = x ∈ Λ;φ(x) > 0,
for φ ∈ Ω+(Λ). The sets A(φ) and B(φ) represent dry and wet regions associ-ated with the height variables φ, respectively. Then the space Ω+(Λ) can bedecomposed in two ways as
Ω+(Λ) =⋃
A⊂ΛΩ0A =
⋃
B⊂ΛΩ+B
where Ω0A = φ ∈ Ω+(Λ);A(φ) = A and Ω+
B = φ ∈ Ω+(Λ);B(φ) = B,respectively.
Let us return to the SDEs (17.1)-(17.2). The corresponding generatorswhen φt moves on the region Ω+
B are given by
LB =∑
x∈BLx
where
LxF (φ) = eH(φ) ∂
∂φ(x)
(
e−H(φ) ∂F
∂φ(x)
)
, φ ∈ Ω+(Λ),
for F = F (φ) ∈ C2b (Ω
+(Λ)). We simply denote H(φ) for HψΛ (φ). We set
L = LΛ,
which is the free generator without pinning nor repulsion. In order to glue Ω+B
to Ω+B∪x at φ(x) = 0, x /∈ B, we need to introduce the boundary operator L
by
LF (φ, x) =1
c
∂F
∂φ(x)−LxF (φ), φ ∈ Ω+(Λ), x ∈ A(φ).
Note that LF (φ, x) can be rewritten as
LF (φ, x) = LB(φ)F (φ) +1
c
∂F
∂φ(x)−LB(φ)∪xF (φ),
and compare this expression with the boundary operator Lf(x) defined bythe formula (7.2) of [184], p.204. The gluing operators for Ω+
B\C with Ω+B for
C ⊂ B is unnecessary if |C| ≥ 2, since the direct transitions between such twosets never occur (more precisely, occur with probability 0) for φt.

Stochastic Interface Models 135
Lemma 17.1 For F ∈ C2b (Ω
+(Λ)),
F (φt) − F (φ0) −∫ t
0
LF (φt) dt−∑
x∈Λ
∫ t
0
cLF (φt, x) d`t(x)
is a martingale.
Proof. Applying Ito’s formula, we have
dF (φt) =∑
x∈Λ
∂F
∂φ(x)(φt) dφt(x) +
∑
x∈Λ
∂2F
∂φ(x)2(φt)1(0,∞)(φt(x)) dt
=∑
x∈Λ1(0,∞)(φt(x))LxF (φt) dt+
∑
x∈Λ
∂F
∂φ(x)(φt) d`t(x) + dmt
= LF (φt) dt+∑
x∈ΛcLF (φt, x) d`t(x) + dmt,
where
mt =∑
x∈Λ
∫ t
0
1(0,∞)(φs(x)) ·√
2∂F
∂φ(x)(φs) dws(x)
is a martingale. Note that d`t(x) = 0 if x ∈ B(φt) and dt = cd`t(x) if x ∈A(φt), which follow from the conditions (17.2)-(b) and (c), respectively. ut
Lemma 17.2 Let F,G ∈ C2b,0(Ω
+(Λ)) and assume that F satisfies the
“boundary conditions” LF (φ, x) = 0 for every φ ∈ Ω+(Λ) and x ∈ A(φ).Then, we have
∫
Ω+(Λ)
GLF dµψ,J,+Λ = −∫
Ω+(Λ)
∑
x∈B(φ)
∂F
∂φ(x)
∂G
∂φ(x)dµψ,J,+Λ . (17.3)
In particular, µψ,J,+Λ is reversible for (L, L)-diffusion, cf. [184], p.204.
Proof. The probability measure µψ,J,+Λ admits a decomposition (recall Lemma7.6):
µψ,J,+Λ (·) =∑
A⊂Λν(A)µ0
A(·),
where
µ0A(dφ) ≡ µ+
Ac(dφ) =1
Z0A
e−H(φ)∏
x∈Acdφ+(x)
∏
x∈Aδ0(dφ(x)),
ν(A) =c|A|Z0
A
Zψ,J,+Λ
= µψ,J,+Λ (A(φ) = A).
If x ∈ Ac(≡ Λ \A), by the integration by parts,

136 T. Funaki
∫
Ω+(Λ)
GLxF µ0A(dφ) = −
∫
Ω+(Λ)
∂G
∂φ(x)
∂F
∂φ(x)µ0A(dφ)
−∫
Ω+(Λ)
G · e−H ∂F
∂φ(x)
∣
∣
∣
∣
φ(x)=0
1
Z0A
∏
y∈Acdφ+(y)
∏
y∈Aδ0(dφ(y))
and the second term can be further rewritten as
−∫
Ω+(Λ)
G∂F
∂φ(x)
Z0A∪xZ0A
µ0A∪x(dφ).
Therefore,∫
Ω+(Λ)
GLF µψ,J,+Λ (dφ) =∑
x∈Λ
∑
A⊂Λν(A)
∫
Ω+(Λ)
GLxF µ0A(dφ)
= −∑
x∈Λ
∑
A:x∈Acν(A)
∫
Ω+(Λ)
∂G
∂φ(x)
∂F
∂φ(x)µ0A(dφ)
−∑
x∈Λ
∑
A:x∈Acν(A)
∫
Ω+(Λ)
G∂F
∂φ(x)
Z0A∪xZ0A
µ0A∪x(dφ)
+∑
x∈Λ
∑
A:x∈Aν(A)
∫
Ω+(Λ)
GLxF µ0A(dφ).
The first term coincides with the right hand side of (17.3). Setting A′ :=A∪x first and then writing A′ by A again, the second term can be rewrittenas
−∑
x∈Λ
∑
A:x∈Aν(A \ x)
∫
Ω+(Λ)
G∂F
∂φ(x)
Z0A
Z0A\x
µ0A(dφ)
= −∑
x∈Λ
∑
A:x∈Ac−1ν(A)
∫
Ω+(Λ)
G∂F
∂φ(x)µ0A(dφ).
Therefore, the sum of the second and the third terms becomes
∑
x∈Λ
∑
A:x∈Aν(A)
∫
Ω+(Λ)
G
LxF − c−1 ∂F
∂φ(x)
µ0A(dφ)
= −∫
Ω+(Λ)
G∑
x∈A(φ)
LF (φ, x)µψ,J,+Λ (dφ) = 0
by the boundary conditions. ut
Dynamics with volume conservation law
Mixing the ideas behind the SDEs (10.30) and (17.1), one can introduce dy-namics with conservation law by means of other SDEs

Stochastic Interface Models 137
dφt(x) =1(0,∞)(φt(x))∆∂H
∂φ(x)(φt)dt
+ 1(0,∞)(φt(x)) ·√
2dw∆t (x) −∆d`∆t (x), x ∈ Λ, (17.4)
subject to the conditions (17.2) with `t(x) replaced by `∆t (x). The operator ∆in the first and the last terms of the right hand side is the discrete Laplacianacting on the variable x and the Brownian motions w∆t (x);x ∈ Λ has acovariance structure
E[w∆t (x)w∆s (y)] = −∆Λ(x, y) · t ∧ s,
where ∆Λ(x, y), x, y ∈ Λ is the kernel of the discrete Laplacian.The first fundamental questions are the same as before, i.e., construction,
uniqueness of the dynamics and the identification of all reversible measures.Then, an interesting question for these dynamics is the derivation of the mo-tion of the Winterbottom shape, cf. Sect. 7.3.
Let us consider the SDEs (17.4) taking Λ = TdN . The corresponding macro-
scopic height variables are defined by
hN (t, θ) =1
N
∑
x∈TdN
φNαt(x)1B( xN ,1N )(θ), θ ∈ T
d.
To pick up the correct scaling Nα in time, we take a test function f = f(θ) ∈C∞(Td) and consider 〈hN (t), f〉 as in Sect. 10.1-(c). Then, its martingale termis given (with small error) by
√2
Nd+1
∑
x∈TdN
f( x
N
)
1(0,∞)(φNαt(x))w∆Nαt(x)
whose quadratic variational process is
= 2Nα−2d−2t∑
x,y∈TdN
f( x
N
)
f( y
N
)
× 1(0,∞)(φNαt(x)) (−∆(x, y)) 1(0,∞)(φNαt(y))
∼ 2Nα−d−4t〈f1Dt , (−∆)f1Dt〉
where Dt := the support of the Winterbottom shape (arising in the limit) attime t and the last ∆ is the continuum Laplacian on T
d. Therefore, one canexpect that the correct time scaling should be α = d+ 4.

138 T. Funaki
18 Other dynamic models
18.1 Stochastic lattice gas with two types of particles and freeboundary problems
At sufficiently low temperature, physical systems exhibit phase transition phe-nomena. Suppose that more than one phase coexist in the initial state of thesystem. Then a boundary will separate the phases, and this phase boundarywould move according to a proper evolutional rule. Determination of the mo-tion of the phase boundary is called the problem of phase separation, dynamicphase transition, pattern formation, etc., and is analyzed in various kinds ofsituations. This subsection summarizes approaches from particles’ systems.
Infinitely many particles are scattered over Zd and each of them performs
random walk with jump rate determined from the surrounding configurationunder the exclusion rule that at most one particle can occupy each site at eachtime. Such particles’ system is called (stochastic) lattice gas or Kawasaki dy-namics. The model for generation and extinction of particles at each site iscalled Glauber dynamics. The system taking all these effects (i.e., jumps, gen-erations and extinctions) into account is called Glauber-Kawasaki dynamics.
Starting from Glauber dynamics and others, Spohn [274] studied a pat-tern formed after proper scaling and derived the motion by mean curvature.The argument there is rather heuristic, but contains several suggestive con-jectures. Presutti and others [78], [194], [163] derived (isotropic) motion bymean curvature for the interfaces from Glauber-Kawasaki dynamics. Since onecan derive the reaction-diffusion equation from Glauber-Kawasaki dynamicsunder proper hydrodynamic scaling limit (cf. [75], [79]) and the motion bymean curvature can be obtained from the reaction-diffusion equation undersingular limit (see Sect. 18.3), these results are thought of as the two scalingsare accomplished at once. In [76], [77], [195], the motion by mean curvaturewas derived from the Glauber dynamics corresponding to the Kac’s type po-tential with long range interaction. However, except [78], the arising limits arenon-random, while [78] treated the case that several random phase separationpoints appear. See a review paper by Giacomin et al. [168].
One phase or two phases Stefan free boundary problems are derived fromthe systems with two types of particles (e.g., A/B types) in which each typeperforms the Kawasaki dynamics possibly with different jump rate dependingon the types and, if different type of particles meet, both of them disappear.One dimensional case was discussed by Chayes and Swindle [64], and Funaki[145] extended their results to higher dimensions taking the effect of latentheat into account. See Quastel [254], Landim et al. [211], Ben Arous andRamırez [19], Gravner and Quastel [174] for investigations of systems withtwo types of particles. Komoriya [207] dealt with the case that, if differenttype of particles meet, they reflect. The result in [211] is applicable to thesystem of three types of particles called Potts model. See Ben Arous et al.[18] for internal DLA in a random environment.

Stochastic Interface Models 139
18.2 Interacting Brownian particles at zero temperature
This subsection reviews the results of [149], [150] on a system of interactingBrownian particles in R
d, whose discretization on the lattice Zd is in fact
the Kawasaki dynamics. The goal is derivation of the motion of the Wulffshape from such system. As we have seen, for this purpose, the structure ofthe Gibbs measures corresponding to these dynamics (with infinitely manyparticles) needs to be clarified. However, if d ≥ 2, this is not known for longexcept the simplest situation that the temperature of the system is zero. Weshall discuss the system under the zero temperature limit hoping that thiswould serve as the first stage toward a deeper analysis on the motion of theWulff shape.
Model and problems
The time evolution of the positions of interacting Brownian N particles in Rd,
denoted by x(t) = (xi(t))Ni=1 ∈ (Rd)N , is prescribed by the SDEs
dxi(t) = −β2∇xiH(x(t)) dt + dwi(t), 1 ≤ i ≤ N, (18.1)
where β > 0 represents the inverse temperature of the system and (wi(t))Ni=1
is a family of independent d dimensional Brownian motions. The Hamiltonianis the sum of pairwise interactions between particles
H(x) =∑
1≤i<j≤NU(xi − xj)
and the gradient ∇xiH(x) ≡ ∑
j 6=i∇U(xi − xj) is taken in the variable xi.
The potential U(x) = U(|x|), x ∈ Rd is radially symmetric and satisfies the
following three conditions:
(U1) U ∈ C30 (R),where U(−r) := U(r),
(U2) U attains a unique minimum at r = a > 0 such that U(a) = minr>0
U(r),
(U3) c = U ′′(a) > 0.
The range of U is defined by b = infr > 0;U(s) = 0 for every s > r.The problem is to study the zero temperature limit for the system (18.1).
One can expect that the configurations x are crystallized (i.e., frozen) in anequal distance a as β → ∞. More precisely, we shall study the followingproperties.
• Microscopic behavior: The structure of crystallization is kept under thetime evolution except the isometric movement.
• Macroscopic behavior: The limits of translational and rotational motionsare characterized.
• Coagulation of several crystals for one dimensional system.

140 T. Funaki
Rigid crystals
A configuration z = (zi)Ni=1 ∈ (Rd)N is called a crystal if
|zi − zj | = a or |zi − zj | > b
for every i 6= j. (A certain condition is required on b for such z to exist.) Forθ ∈ SO(d) and η ∈ R
d, let ϕθ,η be an isometry on Rd or on (Rd)N defined
by ϕθ,η(y) = θy + η for y ∈ Rd and ϕθ,η(x) = (ϕθ,η(xi))
Ni=1 for x = (xi)
Ni=1.
A crystal z is called rigid if the energy H increases under any perturbativetransformations except isometries, i.e., if there exists δ > 0 such that
H(x) > H(z) for every x ∈ M(δ) \M,
where M ≡ Mz = ϕθ,η(z); θ ∈ SO(d), η ∈ Rd and M(δ) is a δ-
neighborhood of M in (Rd)N . The rigidity means that z has no internaldegree of freedom except for the isometry. For example in 2 dimension, thethree vertices of equilateral triangle form a rigid crystal, but the four verticesof square do not. The rigid crystal is a local minimum of H by definition, butnot necessarily a global one.
We further introduce the notion of infinitesimal rigidity. Tangent spaceto M at z is defined by
Hz =
Xz + h;X ∈ so(d), h ∈ Rd
⊂ (Rd)N ,
whereXz+h = (Xzi+h)Ni=1 and so(d) = X : d×d real matrices;X+tX = 0
is the Lie algebra of SO(d). Let H⊥z be the orthogonal subspace to Hz in
(Rd)N . Note that, if δ > 0 is sufficiently small, x ∈ M(δ) admits a uniquedecomposition x = z(x) + h(x) such that z(x) ∈ M and h(x) ∈ H⊥
z(x). TheHessian of H on M is given by
E(h) ≡ Ez(h) =c
a2
∑
〈i,j〉(hi − hj , zi − zj)
2,
for h = (hi)Ni=1 ∈ (Rd)N . The sum 〈i, j〉 is taken over all pairs i, j such that
|zi − zj | = a.
Definition 18.1 A crystal z is called infinitesimally rigid if
E(h) = 0 ⇐⇒ h ∈ Hz
i.e., the Hessian is non-degenerate to the orthogonal direction.
Note that “h ∈ Hz ⇒ E(h) = 0” is obvious, in fact, the translationalinvariance of H implies E(h) = 0, while its rotational invariance impliesE(Xz) = 0. The infinitesimal rigidity implies the rigidity. These notion werestudied by Cauchy (1831), Alexandrov (1958), Asimow and Roth [13], Whitely[291] and others related to architecture (truss), geodesy (satellite) etc. for moregeneral bar and joint frameworks. An example of infinitesimally rigid crystalis found in Fig. 8.

Stochastic Interface Models 141
Fig. 8. 2 dimensional Crystal
Microscopic shape theorem
The basic scaling parameter is the ratio ε = (microscopic spatial unitlength)/(macroscopic spatial unit length) so that (εxi)
Ni=1 is the macroscopic
correspondence to the microscopic configuration x = (xi)Ni=1. The number of
particles and the inverse temperature will be rescaled in ε: N = N(ε), β =
β(ε). Let a sequence of infinitesimally rigid crystals z(ε) = (z(ε)i )Ni=1; 0 < ε <
1 be given. For sufficiently small c > 0, the c-neighborhood of M = Mz(ε) isdefined by M∇(c) ≡ M∇,N (c) = x ∈ (Rd)N ; ‖∇h(x)‖∞ ≤ c, where h(x) ∈H⊥
z(x) was determined by decomposing x and ‖∇h‖∞ = sup〈i,j〉 |hi − hj |. We
introduce the macroscopic time change for the solution x(t) of the SDEs (18.1)
x(ε)(t) = x(ε−κt), κ = d+ 2.
Theorem 18.1 (Funaki [149]) Let c(ε) ↓ 0 (as ε ↓ 0) be given and assumethat x(ε)(0) ∈ M∇(c′(ε)) for some c′(ε) c(ε) (i.e., the initial configurationis nearly an infinitesimally rigid crystal) and β = β(ε) → ∞ sufficiently fastas ε ↓ 0. Then, we have that
limε↓0
P (σ(ε) ≥ t) = 1,
for every t > 0, where σ(ε) = inft ≥ 0;x(ε)(t) /∈ M∇(c(ε)). In other words,asymptotically with probability one x(ε)(t) keeps its rigidly crystallized shapewithin fluctuations c(ε).
For the proof of the theorem, Lyapunov type argument is applied combin-ing with a spectral gap estimate for E(h).
Motion of a macroscopic body
We say that a sequence x(ε) = (x(ε)i )Ni=1, N = N(ε) of configurations has a
macroscopic density function ρ(y), y ∈ Rd if

142 T. Funaki
εdN∑
i=1
δεx
(ε)i
(dy) ⇒ ρ(y) dy
weakly as ε ↓ 0. The initial configurations x(ε)(0) = z(ε)(= (z(ε)i )Ni=1) are
assumed to be infinitesimally rigid crystals with macroscopic density function
ρ(y) and |z(ε)i | ≤ Rε−1 for all i and ε and for some R > 0. The particles’
number behaves as N = N(ε) ∼ ρε−d, where ρ =∫
Rdρ(y)dy. We may assume,
by shifting the system if necessary, that the body is centered:
∫
Rd
yρ(y) dy = 0.
Let Q = (qαβ)1≤α,β≤d be the matrix defined by
qαβ =
∫
Rd
yαyβρ(y) dy.
We may assume by rotating the system that Q is diagonal. The sum
vαβ = qαα + qββ
is called moments of inertia.
Theorem 18.2 (Funaki [149]) Assume that β = β(ε) → ∞ sufficiently fastas ε ↓ 0. Then, x(ε)(t) has a macroscopic density function ρt(y), which is con-
gruent to ρ(y), i.e., ρt(y) = ρ(
ϕ−1θ(t),η(t)(y)
)
. The translational and rotational
motions (η(t), θ(t)) of the limit body are random and characterized as follows:
(1) η(t) and θ(t) are mutually independent.(2) η(t) = (d dimensional Brownian motion)/
√ρ
(3) θ(t) is a Brownian motion on SO(d) which is a solution of SDE ofStratonovich’s type
dθ(t) = θ(t) dm(t), θ(0) = I
where m(t) = (mαβ(t)) is an so(d)-valued Brownian motion such thatthe components mαβ(t);α < β in the upper half of the matrix m(t)are mutually independent and mαβ(t) = (one dimensional Brownian
motion)/√vαβ.
Remark 18.1 (1) One can discuss motion of thin bodies, i.e., n-dimensionalRiemannian manifolds in R
d, n < d, for which ρ(y) ≡ 0. This could be appliedfor polymer or membrane. Right time scaling is x(ε)(t) = x(ε−κt) with κ =n+ 2.(2) The Hamiltonian of the system may be modified, e.g., into H(x)+ threebody interactions. Then the notion of rigidity may change.

Stochastic Interface Models 143
Coagulation in one dimension
Consider the SDEs (18.1) in R taking β = ε−α, α > 0:
dxi(t) = − ε−α
2
∑
j 6=iU ′(xi(t) − xj(t)) dt+ dwi(t), 1 ≤ i ≤ N.
Theorems 18.1 and 18.2 have dealt with motion of single macroscopic body.In one dimension one can establish coagulation of several bodies (bodies arecalled rods in one dimension). We need additional assumptions on U such thatthe well at a is deep and located away from 0.
Since the rods evolve independently until they meet (i.e., until the timewhen the microscopic distance between two rods becomes b) and since theanalysis of multiple rods can be essentially reduced to the two rods case, weassume the following two conditions on the initial configuration x(0):
(1) x(0) = x(1)(0)∪x(2)(0) consists of two nearly rigid crystals (called chainsin one dimension) with particles’ numbers N1 = [ρ1ε
−1], N2 = [ρ2ε−1]
and fluctuation εν , ν > 1/2, i.e., x(`)(0) ∈ M∇,N`(εν), ` = 1, 2, whereρ1, ρ2 > 0.
(2) The distance of these two chains (that between the right most particle ofx(1)(0) and the left most one of x(2)(0)) is b.
Theorem 18.3 (Funaki [150]) Let x(ε)(t) = x(ε−3t) be the macroscopicallytime changed process and assume the above condition on x(0). Take anotherν′ > 0 and suppose that α > max4, 2ν ′ + 3. Then, for every δ > 0, we have
limε↓0
P
x(ε)(t) ∈ M∇,N (εν′
) for some t ≤ ε1−δ
= 1,
where N = N1 +N2.
This theorem claims that two rods in x(ε)(t) coagulate and form a singlerod within a very short time ε1−δ. After the coagulation x(ε)(t) moves as asingle rod as we have seen in Theorem 18.1.
18.3 Singular limits for stochastic reaction-diffusion equations
In this subsection we refer to the results concerning a reaction-diffusion equa-tion with additive noise, i.e., (18.2) below. The equation (18.2) involves aparameter ε > 0 representing the temperature of the system; ε = β−1 in thelast subsection. The spatial variable x is already macroscopic. Taking the lowtemperature limit ε ↓ 0, or a singular limit in mathematical terminology, weexpect that the solution of the equation converges to a point at which the po-tential appearing in the nonlinear reaction term is minimized. Points at whichthe potential attains its minimum, simply called minimal points or bottoms,

144 T. Funaki
correspond to phases in the physical context. If we have more than one phase,phase separation will occur.
Reaction-diffusion equations have been used to describe various kinds ofphenomena, including dynamical phase transitions. However, it is also a natu-ral requirement that the equations are subject to random external influences.For the physical background, see e.g., [183], [242], [123], [22], [135], etc. On theother hand, in connection with microscopic particle systems, we note that theequation treated here is considered to describe an intermediate (mesoscopic)level, between microscopic and macroscopic. Indeed, the reaction-diffusionequation can be derived from Glauber-Kawasaki dynamics by means of thehydrodynamic limit (as we referred in Sect. 18.1), and the noise term nat-urally appears in the fluctuation problem. Besides the hydrodynamic limit,stochastic partial differential equations analogous to (18.2) are known to bederived from particles’ systems via the scaling limit of the mean field type.See [24], [129], [235].
From a purely mathematical point of view, the problem discussed hereconcerns convergence of solutions of stochastic differential equations in aninfinite dimensional space to a process on a submanifold, see Remark 18.3below.
Stochastic reaction-diffusion equations
As already mentioned, the following reaction-diffusion equation with additivenoise is considered in this subsection:
∂u
∂t= ∆u+
1
εf(u) + wε(t, x), t > 0, x ∈ D, (18.2)
where wε(t, x) is a noise depending on ε > 0 and D is a domain in Rd. We
assume that the reaction term f ∈ C∞(R) is bistable:
there exists a u∗ ∈ (−1, 1) such that
f(±1) = f(u∗) = 0, f ′(±1) < 0, f ′(u∗) > 0.(18.3)
Two values ±1 are stable points of f , or more precisely of the correspondingreaction dynamical system u = f(u), and u∗ is an unstable point. A typicalexample is f(u) = u − u3. Our goal is to study the behavior of the solutionu = uε(t, x) of (18.2) as ε ↓ 0. When the reaction term dominates the noiseterm, multiplying both sides by ε yields
limε↓0
f(uε) = 0
formally, while the unstable solution is not considered to appear in the limit.So we guess that
limε↓0
uε(t, x) = +1 or − 1
depending on (t, x). In other words, a random boundary separating +1 and−1 must appear. To find the motion of the boundary is the main problemwhich we discuss here.

Stochastic Interface Models 145
Results in the absence of noise
Before describing results for (18.2), we give a survey of known results in thecase wε = 0. We shall omit precise conditions on initial conditions, etc., forwhich the reader can consult the cited references. In order to catch the mo-tion of the boundary in the limit, it is necessary to introduce an appropriate
time change. This depends heavily on whether the value A(f) :=∫ 1
−1f(u) du
is equal to 0 or not, and also on the spatial dimension d. To explain suchsituations, we introduce a traveling wave solution to the reaction-diffusionequation. A solution m = m(y) of the ordinary differential equation on R
m′′ + cm′ + f(m) = 0, y ∈ R,
m(±∞) = ±1,(18.4)
and a constant c = c(f) ∈ R are called a traveling wave solution and its speedfor the reaction-diffusion equation
∂v
∂t=∂2v
∂y2+ f(v), t > 0, y ∈ R, (18.5)
respectively [177], [114], [12]; y stands for the microscopic spatial variable.Notice that v(t, y) = m(y − ct) gives a special solution to (18.5). Since mis determined uniquely up to parallel displacement, we normalize it so thatm(0) = 0. It is easily seen that A(f) and −c(f) have the same sign, and inparticular A(f) = 0 is equivalent to c(f) = 0. A function F satisfying f = −F ′
is called a potential corresponding to the reaction term. Intuitively speaking,if A(f) > 0, then F (−1) > F (1) holds at the two local minimal points ±,and therefore a wave from −1 toward 1 occurs. This implies that the travelingwave solution moves left and that c(f) < 0. A(f) = 0 is equivalent to two localminima being the same. In the special case f(u) = u−u3, F (u) = (u2−1)2/4,the traveling wave solution is given by m(y) = tanh(y/
√2), and its speed is
c = 0.
(a) The case where A(f) 6= 0
In this case, the proper time scale is of order O(ε1/2). Namely, for the solutionuε of (18.2) with wε = 0, we have
uε(t, x) := uε(ε1/2t, x) −→ε↓0
χΓt(x),
where Γt is a hypersurface contained in D and χΓt(x) = 1 (x outside Γt),χΓt(x) = −1 (x inside Γt). Thus, Γt represents the boundary separating thetwo phases ±1. A wave with speed c(f) is generated at each point of Γt,and the motion of Γt is determined as their enveloping surface (Huygens’principle). Actually, assuming for simplicity that the spatial dimension is one

146 T. Funaki
and considering uε(t, x) = m ((x− ct)/√ε), we see that uε is a special solution
of∂uε
∂t=
√ε∆uε +
1√εf(uε), x ∈ R,
and obviously uε(t, x) −→ χct(x) (ε ↓ 0). Here χξ(x) = 1(x > ξ) and χξ(x) =−1(x < ξ); ξ is a phase separation point. Accordingly, it is easily imaginedthat the proper time scale should be of order O(ε1/2). [122], [124], [105] studythe case where f is of KPP (Kolmogorov-Petrovskii-Piskunov) type, i.e., astable point is unique. The higher dimensional case and the one dimensionalcase with bistable f are studied in [160] and [117], respectively.
(b) The case where A(f) = 0 and d ≥ 2
As we can see from the above result, if A(f) = 0, i.e., c(f) = 0, the wave doesnot move (called standing wave), and hence neither does the phase separationboundary Γt. This means that we need to observe the system in a longer timescale than O(ε1/2) to catch the motion of Γt. In fact, the proper time scale isknown to be O(1):
uε(t, x) −→ε↓0
χΓt(x).
At this time, the hypersurface Γt moves according to the mean curvature flow.This has been studied in many papers, including [233], [109]. The facts thatthe proper time scale is O(1) and the mean curvature flow appears in the limitare somehow understood by setting wε = 0 in the calculations in (e) below.
(c) The case where A(f) = 0 and d = 1
In one dimension, the boundary is a point and so the curvature is 0. This isequivalent to considering a plane wave in a higher dimensional space. There-fore, the motion of the point cannot be observed in a time scale of order O(1).In fact, Carr and Pego [57] showed, by analyzing eigenvalues of the linearizedoperator, that the proper time scale is quite long as O(expCε−1/2), C > 0.
Results in the presence of noise
Let us turn back to the stochastic partial differential equation (18.2). A basicassumption on the reaction term here is that f is bistable and A(f) = 0.Namely, we consider only the cases corresponding to the second and thirdcases in the above. Our main aim is particularly to study how the effect ofnoise is reflected in the scaling and in the motion of the phase boundary inthe limit. As a technical conditions that ensure the existence and uniquenessof a solution of (18.2), we assume that
there exist C, p > 0 such that |f(u)| ≤ C(1 + |u|p) and supuf ′(u) <∞.

Stochastic Interface Models 147
(d) The case where d = 1, D = R and wε(t, x) = εγa(x)wh(t, x)
Here γ > 0, and a ∈ C20 (R) is a function representing the magnitude of the
noise at each point. The condition that a has compact support is introduced sothat the problem can be localized and the boundary conditions uε(t,±∞) =±1 of the equation (18.2) at x = ±∞ hold. wh, 1/2 ≤ h ≤ 1, is a self-similarGaussian noise, i.e., the covariance structure of the noise is formally given by
〈wh(t, x)wh(s, y)〉 = δ0(t− s)Qh(x− y),
where δ0 is the δ-function at 0 and Qh is the Riesz potential of order 2h− 1:
Qh(x) =
h(2h− 1)|x|2h−2
δ0(x)
, 1/2 < h ≤ 1,
, h = 1/2.
In particular, w1/2(t, x) is the space-time white noise and w1(t, x) = w(t) isthe one parameter white noise independent of the spatial variable. Note that
wh(1, x) =
∫ x
0
dy
∫ 1
0
wh(s, y) ds, x ∈ R,
is an h-fractional Brownian motion when x is regarded as the time variable.Under the above conditions, the stochastic partial differential equation (18.2)has a unique solution uε(t, x) in the sense of mild solutions or generalizedfunctions. Although the solution is not differentiable, it is Holder continuous:
uε(t, x) ∈ ∩δ>0Ch2 −δ,h−δ((0,∞) × R), a.s.
Under suitable assumptions on the initial condition and an assumption ofsymmetry of the reaction term, i.e., f is odd: f(u) = −f(−u), we can provethe following theorem.
Theorem 18.4 (Funaki [139], [142]) There exists γ(h) > 0 such that for allγ ≥ γ(h)
uε(t, x) := uε(ε−2γ−ht, x) =⇒ε↓0
χξt(x),
where χξ(x) = 1(x > ξ), χξ(x) = −1(x < ξ). The motion of the phaseseparating point ξt that appeared in the limit is governed by the stochasticdifferential equation
dξt = α1a(ξt)dBt + α2a(ξt)a′(ξt)dt, (18.6)
where Bt is a one dimensional Brownian motion and the constants α1 = α1(h)and α2 = α2(h) are given by
α21 =
1
‖m′‖4L2(R)
∫
R2
m′(x)m′(y)Qh(x− y) dxdy,
α2 = − 1
‖m′‖2L2(R)
∫ ∞
0
dt
∫
R3
xp(t, x, z)p(t, y, z)
× f ′′(m(z))m′(z)Qh(x− y) dxdydz,

148 T. Funaki
respectively. p(t, x, y) is the fundamental solution of the linearized operator∂/∂t− ∂2/∂y2 + f ′(m(y)).
A related result was obtained in the microscopic situation by Presutti etal. [43]. In physics, the case h = 1/2 (that is, the space-time white noise) isimportant, and it is of particular interest to identify the diffusion coefficientgoverning the motion of the random boundary in the limit. We see fromTheorem 18.4 that the diffusion coefficient (also called mobility) of the limitstochastic differential equation is
α1(1/2)2 = ‖m′‖−2L2(R)
if h = 1/2. Here ‖m′‖2L2(R) is called surface tension in this model. This result
is consistent with conjectures of Kawasaki and Ohta [197] and Spohn [274].The time scale ε−2γ−h introduced in Theorem 18.4 is quite different from
the one for the case of absence of noise, and hence the influence of noise isseen to be essential. We explain intuitively why the proper time scale is oforder O(ε−2γ−h). The equation satisfied by u = uε becomes
∂u
∂t= ε−2γ−h
∆u+1
εf(u)
+(
ε−2γ−h)1/2 · εγa(x)wh(t, x)
in the sense of law. This is because the drift is multiplied by ε−2γ−h due to timechange, while the noise term is multiplied by its square root. In particular, weobserve that the noise term is a(x)ε−h/2wh(t, x). But by a very strong forceof order ε−2γ−h( 1) against the drift term, u is attracted to the set
Mε :=
u; ∆u+1
εf(u) = 0, u(±∞) = ±1
=m(
(x− ξ)/√ε)
; ξ ∈ R.
Accordingly, uε(t, x) behaves like uε(t, x) ∼ m ((x− ξt)/√ε), and, in particu-
lar, the width of the boundary region (interface) is O(ε1/2). Since in fact theinfluence of the noise is relevant only in the neighborhood of the interface,the contribution of wh is O(ε1/2h) = O(εh/2) by the self similarity. Thisbalances exactly with the diverging quantity ε−h/2 of the noise term, whichbecomes O(1). In other words, we introduced such a time scale. On the otherhand, since ε−2γ−h expCε−1/2, comparing with the Carr and Pego’s result,we see that the drift term does not influence the tangential motion to Mε,and that only the influence of the noise term survives in the limit.
The assumption that f is an odd function is a sort of centering condition.In the general case where f is not an odd function, it is shown by introducinga different time scale that
uε(ε−2γ−h+ 12 t, x) =⇒ χξt(x), ξt = α3a
2(ξt),
where the constant α3 = α3(h) is given by

Stochastic Interface Models 149
α3 = − 1
2‖m′‖2L2(R)
∫ ∞
0
dt
∫
R3
p(t, x, z)p(t, y, z)
× f ′′(m(z))m′(z)Qh(x− y) dxdydz.
This corresponds to the law of large numbers. If f is an odd function, thenα3 = 0, we need a longer time scale, i.e., that of Theorem 18.4, and a randommotion appears in the limit. One can construct a function f that is not oddand for which α3 6= 0, see [42]. In the case α3 6= 0, the noise generates a newtraveling wave even though A(f) = 0.
The actual proof of Theorem 18.4 consists of two steps: (1) developing aLyapunov type argument to show that the solution uε stays in a neighborhoodof Mε, and (2) introducing a convenient coordinate in the neighborhood ofMε to identify the stochastic differential equation in the limit; essentially thesame methods are used for the proof of Theorems 18.1 and 18.2. In the firststep, we adopt the Ginzburg-Landau-Wilson free energy
Σε(u) =
∫
R
1
2|∇u|2(x) +
1
εF (u(x))
dx
as a Lyapunov function. As already mentioned, the solution of (18.2) is, how-ever, not differentiable. So it is impossible to evaluate Σε at uε directly, andsome devices are required. The Hessian of Σε, or equivalently of Σ1 after in-troducing a scale transform x = εy of the spatial variable, at u = m becomes aSchrodinger operator −∆+F ′′(m). By using the spectral gap of this operator,i.e., the fact that the eigenvalue 0 is simple and other spectra are away from0 and positive, one can compute the speed of convergence of uε to Mε. In do-ing this, the condition that γ is sufficiently large (i.e., γ ≥ γ(h)) is required.Next, we begin the second step by considering the partial differential equation(18.5). If the initial value v0 is in an L2-neighborhood of M1 (we again usedthe transform x = εy and assumed ε = 1), then the solution v = v(t, y) is seento converge to a point mζ(y) := m(y − ζ) in M1 as t→ ∞. If we denote thisζ as ζ = ζ(v0) ∈ R since it depends on the initial value v0, then ζ(v0) definesa very convenient coordinate in the L2-neighborhood of M1. To make use ofthis coordinate, we can cancel the diverging drift term. Readers are referredto [139] for details.
(e) The case where d = 2 and D is a bounded domain in R2 with smooth
boundary
In (d) we considered the one dimensional case, while results for higher dimen-sional case, especially the two dimensional case, are described here. Consider(18.2) with Neumann boundary condition: ∂u/∂n = 0 (x ∈ ∂D). Here theassumption that f is an odd function is not necessary. For simplicity thenoise is assumed to be independent of the spatial variable, depending on onlythe time variable: wε(t, x) = ξεt/
√ε, where ξεt = ε−γξ(ε−2γt), 0 < γ < 1/3,

150 T. Funaki
and ξ(t) ∈ C1(R+), a.s. is a mean 0 stationary process with the strong mix-ing property. Roughly speaking, ξεt ⇒ αwt as ε ↓ 0. However, at present wecannot deal with the case of ξεt = αwt directly, and instead mild noises areconsidered. In the above wt is a one dimensional Brownian motion and α is aconstant given by the Green-Kubo formula
α =
√
2
∫ ∞
0
E[ξ(0)ξ(t)] dt.
Then, under suitable initial conditions, the following holds for the solutionuε(t, x) of (18.2).
Theorem 18.5 (Funaki [146]) As long as the phase separation curve Γt inthe limit is strictly convex and does not touch the boundary ∂D, we have
uε(t, x) =⇒ε↓0
χΓt(x),
where the motion of the curve Γt is given by a random perturbation of thecurvature flow:
V = κ+ (c0α)wt. (18.7)
Here, V is the inner normal speed of Γt, κ denotes the curvature of Γt, andc0 is given by
c0 =√
2
/∫ 1
−1
du
√
∫ 1
u
f(v) dv.
Let us explain intuitively why the kinetic equation (18.7) is obtained inthe limit. Since ξεt ∼ αwt, (18.2) is rewritten almost into
∂u
∂t= ∆u+
1
ε
f(u) +√εαwt
.
That is, the potential is randomly perturbed as F (u)−(√εαwt)u, its depth at
the minimal point varies, and as a result a flow toward a new minimal point(small traveling wave) is generated. This is manifested as c0αwt in (18.7).To explain more precisely, for each a ∈ R(|a| sufficiently small), define m =m(y; a) and c = c(a) as the solution of
m′′ + cm′ + f(m) + a = 0, y ∈ R,
m(±∞) = m∗±,
(18.8)
where m∗± ≡ m∗
±(a) = ±1 + O(a) (a → 0) solve f(m∗±) + a = 0. Then the
solution of (18.2) is considered to behave as
uε(t, x) ∼ m(d(x, Γt)/√ε;√εαwt),
where d(x, Γt) is the signed distance between x and Γt, and so by substitutingthis into (18.2) we get

Stochastic Interface Models 151
0 =∂uε
∂t−∆uε − 1
εf(uε) − α√
εwt
∼ 1√εm′(
d√ε
)
∂d
∂t−
1√εm′(
d√ε
)
∆d+1
εm′′(
d√ε
)
|∇d|2
− 1
εf(m) − α√
εwt
∼ 1√εm′(
d√ε
)
∂d
∂t−∆d− c0αwt
,
in which we used (18.8), |∇d| = 1 near Γt and c(a) = c(0) + c′(0)a+O(a2) =−c0a + O(a2) to get the last expression. Notice that the equation (18.8) isused to make the term O(1/ε) in the expression vanish. Therefore we get
∂d
∂t= ∆d+ c0αwt
as a condition for the term O(1/√ε) in the expansion to vanish. Noting that
∆d gives the curvature on Γt, one obtains the limit equation (18.7).We briefly mention the proof of Theorem 18.5. Because the noise is mild, it
is possible to apply methods of partial differential equations. In particular, thecomparison theorem enables us to construct a supersolution and a subsolutionof (18.2). Defining motion of the curve Γ εt in D by
V = κ− 1√εc(√εξεt ), (18.9)
we give them as functions that approximate uε(t, x) := m(d(x, Γ εt )/√ε;√εξεt ).
But, if Γ εt is convex, (18.9) can be rewritten into a partial differential equation
∂κ
∂t= κ2
∂2κ
∂θ2+ κ− 1√
εc(√εξεt )
(18.10)
for the curvature function κ = κε(t, θ), which is determined through the Gaussmap (θ ∈ S1 7→ x(θ) ∈ Γ εt ) [176]. Based on energy inequalities for (18.10),it can be shown that the solution of (18.10) converges to a solution of thestochastic partial differential equation
∂κ
∂t= κ2
∂2κ
∂θ2+ κ+ c0α wt
(18.11)
in the sense of law as ε ↓ 0, where stands for the Stratonovich stochasticintegral. (18.11) gives the mathematical meaning of the random perturbation(18.7) of the curvature flow.
For the time after the convexity of Γt is broken, Theorem 18.5 has notbeen proven. An interesting open problem is to overcome this by extendingthe notion of viscosity solution [108], [65], [68], [170] or Γ -convergence [230],[69], [120], [3] to a probabilistic version. The investigation on the stochastic

152 T. Funaki
viscosity solutions related to the random motion by mean curvature has indeedstarted by [221], [222], see also [144]. The papers [8], [9], [204] give anotherapproach from the calculus of variations. We note that a probabilistic versionis [294].
Remark 18.2 (1) In the case where wε(t, x) is the space-time white noiseand D = R
3, Kawasaki and Ohta [197], [242] considered (18.2) and deriveda random mean curvature flow describing the motion of the phase boundary,calling the limit the drumhead model. However, equation (18.2) does nothave a mathematical meaning in dimensions greater than one, and the proofof existence of the solution is impossible. Other physical papers on the deriva-tion of kinetic equations of interfaces or analysis of their equilibrium statesinclude [7], [89], [244].(2) See [115], [116] for a survey on reaction-diffusion equations, and [183],[123], [22], [135], [137] etc., for reaction-diffusion equations with additive noise.One can consult [234], [284] about traveling wave solutions for stochastic par-tial differential equations. It is of interest that by the influence of noise thespeed becomes smaller than the minimal speed of the KPP equation (e.g., [39]).A random motion of the phase boundary is discussed in [283] as well.(3) Among the literature concerning interface curves we mention [176], andits probabilistic version is discussed in [193]. See [232], [106], [230], [9] forgeometric measure theory.
Remark 18.3 (1) Problems discussed in Sects. 18.2 and 18.3 can be viewedas convergence of solutions of stochastic differential equations in an infinite (orlarge) dimensional space toward a submanifold where the minimum energy isattained. Such problems are treated in [196], [153] in finite dimensional spaces.Let us give some more detail. Let N be a finite dimensional Riemannianmanifold and b a smooth vector field on N , and consider the diffusion process
xεt corresponding to a differential operator ε2
2 ∆ + b, ε > 0. First, in the casewhere M is equal to the set of asymptotically stable fixed points of b and formsa manifold, let Xε
t be xεε−1t. Then the generator of Xεt is 1
2∆+ε−1b. Thereforethe diffusion process Xε
t is subject to the strong drift ε−1b toward M. After itarrives in a neighborhood of M, the influence of ∆ survives also in directionstangent to M. By using the Fermi coordinate to decompose into tangential andnormal directions to M and computations based on a perturbation method, wecan find a concrete generator of the diffusion process Xt on M, the limit of Xε
t
[153]. This is basically a local problem, but it becomes global in the case whereM := the set of all stable points of b = x1, · · · , xp consists of a finitenumber of points. In this case, first we must study the asymptotic behaviorof the mean arrival time in a neighborhood of xi from a neighborhood of xjmuch more precisely than the Wentzell-Freidlin result at the large deviationprinciple level. It turned out [278] that in order to see the behavior of xεt it isnecessary to consider a much longer time scale than that for the local problem.As an infinite dimensional version, a nonrandom case is discussed in [282] inconnection with the study of turbulence like the Navier-Stokes equation. An

Stochastic Interface Models 153
extension to its probabilistic version is discussed in [119].(2) A related problem of a large deviation principle is studied in [31], etc.,especially for the case where minimal points of the rate functional are notunique, and [111] discussed the case of stochastic partial differential equationsfor which exactly two minimal points exist. One can consult also [248].
Remark 18.4 The zero temperature limit and the metastable behavior ofGlauber dynamics (under the periodic boundary conditions) or Kawasaki dy-namics (in an infinite gas reservoir) were investigated by Ben Arous and Cerf[16] and by den Hollander et al. [74], respectively.

154 T. Funaki
References
1. D. Abraham, Surface structures and phase transitions - exact results, In:Phase Transitions and Critical Phenomena, 10 (1986), pp. 1–74, AcademicPress.
2. D. Abraham, P. Collet, J. De Coninck and F. Dunlop, Langevin dy-namics of an interface near a wall, J. Statis. Phys., 61 (1990), pp. 509–532.
3. G. Alberti, G. Bellettini, M. Cassandro and E. Presutti, Surface ten-sion in Ising systems with Kac potentials, J. Statis. Phys., 82 (1996), pp. 743–796.
4. S. Albeverio, Yu.G. Kondratiev and T.V. Tsikalenko, Stochastic dy-namics for quantum lattice systems and stochastic quantization I: Ergodicity,Random Oper. Stoch. Equ., 2 (1994), pp. 103–139.
5. S. Albeverio, Yu.G. Kondratiev, M. Rockner and T.V. Tsikalenko,Uniqueness of Gibbs states for quantum lattice systems, Probab. Theory Relat.Fields, 108 (1997), pp. 193–218.
6. K.S. Alexander, Cube-root boundary fluctuations for droplets in random clus-ter models, Commun. Math. Phys., 224 (2001), pp. 733–781.
7. S.M. Allen and J.W. Cahn, A microscopic theory for antiphase boundarymotion and its application to antiphase domain coarsening, Acta Metall., 27
(1979), pp. 1085–1095.8. F. Almgren, J.E. Taylor and L. Wang, Curvature-driven flows: a varia-
tional approach, SIAM J. Control Optim., 31 (1993), pp. 387–437.9. F. Almgren, Questions and answers about area-minimizing surfaces and ge-
ometric measure theory, Proc. Sympo. Pure Math., 54 (1993), pp. 29–53.10. H.W. Alt and L.A. Caffarelli, Existence and regularity for a minimum
problem with free boundary, J. Reine Angew. Math., 325 (1981), pp. 105–144.11. H.W. Alt, L.A. Caffarelli and A. Friedman, Variational problems with
two phases and their free boundaries, Trans. Amer. Math. Soc., 282 (1984),pp. 431–461.
12. D.G. Aronson and H.F. Weinberger, Multidimensional nonlinear diffusionarising in population genetics, Adv. Math., 30 (1978), pp. 33–76.
13. L. Asimow and B. Roth, The rigidity of graphs, Trans. Amer. Math. Soc.,245 (1978) pp. 279–289.
14. B. Bakry and M. Emery, Diffusions hypercontractives, In: Seminaire deProbabilites XIX, Lect. Notes Math., 1123 (1985), Springer, pp. 179–206.
15. V. Barbu, Nonlinear semigroups and differential equations in Banach spaces,Noordhoff, 1976.
16. G. Ben Arous and R. Cerf, Metastability of the three-dimensional Isingmodel on a torus at very low temperature, Electron. J. Probab., 1 ResearchPaper 10 (1996).
17. G. Ben Arous and J.-D. Deuschel, The construction of the d + 1-dimensional Gaussian droplet, Commun. Math. Phys., 179 (1996), pp. 467–488.
18. G. Ben Arous, J. Quastel and A.F. Ramırez, Internal DLA in a randomenvironment, Ann. Inst. Henri Poincare, 39 (2003), pp. 301–324.
19. G. Ben Arous and A.F. Ramırez, Asymptotic survival probabilities in therandom saturation process, Ann. Probab., 28 (2000), pp. 1470–1527.

Stochastic Interface Models 155
20. G. Benfatto, E. Presutti and M. Pulvirenti, DLR measures for one-dimensional harmonic systems, Z. Wahr. verw. Gebiete, 41 (1978), pp. 305–312.
21. A. Bensoussan and J.L. Lions, Applications of Variational Inequalities inStochastic Control, North-Holland, 1982.
22. R. Benzi, G. Jona-Lasinio and A. Sutera, Stochastically perturbed Landau-Ginzburg equations, J. Statis. Phys., 55 (1989), pp. 505–522.
23. L. Bertini, C. Landim and S. Olla, Derivation of Cahn-Hilliard equationsfrom Ginzburg-Landau models, J. Statis. Phys., 88 (1997), pp. 365–381.
24. L. Bertini, E. Presutti, B. Rudiger and E. Saada, Dynamical fluctua-tions at the critical point: convergence to a non linear stochastic PDE, TheoryProbab. Appl., 38 (1993), pp. 689–741.
25. D. Bertacchi and G. Giacomin, Enhanced interface repulsion from quenchedhard-wall randomness, Probab. Theory Rel. Fields, 124 (2002), pp. 487–516.
26. D. Bertacchi and G. Giacomin, Wall repulsion and mutual interface repul-sion: an harmonic crystal model in high dimensions, preprint, 2002.
27. T. Bodineau, The Wulff construction in three and more dimensions, Commun.Math. Phys., 207 (1999), pp. 197–229.
28. T. Bodineau, G. Giacomin and Y. Velenik, On entropic reduction of fluc-tuations, J. Statist. Phys., 102 (2001), pp. 1439–1445.
29. T. Bodineau, D. Ioffe and Y. Velenik, Rigorous probabilistic analysis ofequilibrium crystal shapes, J. Math. Phys., 41 (2000), pp. 1033–1098.
30. T. Bodineau, D. Ioffe and Y. Velenik, Winterbottom construction for fi-nite range ferromagnetic models: an 1 -approach, J. Statist. Phys., 105 (2001),pp. 93–131.
31. E. Bolthausen, Laplace approximations for sums of independent random vec-tors, Part II. Degenerate maxima and manifolds of maxima, Probab. TheoryRelat. Fields, 76 (1987), pp. 167–206.
32. E. Bolthausen, Large deviations and perturbations of random walks and ran-dom surfaces, European Congress of Mathematics, Vol. I (Budapest, 1996), pp.108–120, Progr. Math., 168, Birkhauser, 1998.
33. E. Bolthausen and J.-D. Deuschel, Critical large deviations for Gaussianfields in the phase transition regime I, Ann. Probab., 21 (1993), pp. 1876–1920.
34. E. Bolthausen, J.-D. Deuschel and G. Giacomin, Entropic repulsion andthe maximum of two dimensional harmonic crystal, Ann. Probab., 29 (2001),pp. 1670–1692.
35. E. Bolthausen, J.-D. Deuschel and O. Zeitouni, Entropic repulsion of thelattice free field, Commun. Math. Phys., 170 (1995), pp. 417–443 (Erratum:ibid, 209 (2000), pp. 547–548).
36. E. Bolthausen, J.-D. Deuschel and O. Zeitouni, Absence of a wettingtransition for a pinned harmonic crystal in dimensions three and larger, J.Math. Phys., 41 (2000), pp. 1211–1223.
37. E. Bolthausen and D. Ioffe, Harmonic crystal on the wall: a microscopicapproach, Commun. Math. Phys., 187 (1997), pp. 523–566.
38. E. Bolthausen and Y. Velenik, Critical behavior of the massless free fieldat the depinning transition, Commun. Math. Phys., 223 (2001), pp. 161–203.
39. M. Bramson, Convergence of solutions of the Kolmogorov equation to travel-ling waves, Memoirs Amer. Math. Soc., 285 (1983).

156 T. Funaki
40. H.J. Brascamp and E.H. Lieb, On extensions of the Brunn-Minkowski andPrekopa-Leindler theorems, including inequalities for log concave functions,and with an application to the diffusion equation, J. Funct. Anal., 22 (1976),pp. 366–389.
41. H.J. Brascamp, E.H. Lieb and J.L. Lebowitz, The statistical mechanics ofanharmonic lattices, Bull. Int. Statis. Inst., 1975, pp. 393–404.
42. S. Brassesco and P. Butta, Interface fluctuations for the D = 1 stochasticGinzburg-Landau equation with nonsymmetric reaction term, J. Statist. Phys.,93 (1998), pp. 1111–1142.
43. S. Brassesco, A. De Masi and E. Presutti, Brownian fluctuations of theinstanton in the d=1 Ginzburg-Landau equation with noise, Ann. Inst. HenriPoincare, 31 (1995), pp. 81–118.
44. H. Brezis, Operateurs Maximaux Monotones et Semi-Groupes de Contractionsdans les Espaces de Hilbert, North-Holland, Amsterdam, 1973.
45. J. Bricmont, J.-R. Fontaine, J.L. Lebowitz and T. Spencer, Latticesystems with a continuous symmetry, I. Perturbation theory for unboundedspins, Commun. Math. Phys., 78 (1980), pp. 281–302.
46. J. Bricmont, J.-R. Fontaine, J.L. Lebowitz and T. Spencer, Lattice sys-tems with a continuous symmetry, II. Decay of correlations, Commun. Math.Phys., 78 (1981), pp. 363–371.
47. D. Brydges, J. Frohlich and T. Spencer, The random walk representationof classical spin systems and correlation inequalities, Commun. Math. Phys.,83 (1982), pp. 123–150.
48. D. Brydges and H.-T. Yau, Grad ϕ perturbations of massless Gaussian fields,Commun. Math. Phys., 129 (1990), pp. 351–392.
49. L.A. Caffarelli and J.L. Vazquez, A free-boundary problem for the heatequation arising in flame propagation, Trans. Amer. Math. Soc., 347 (1995),pp. 411–441.
50. L.A. Caffarelli, C. Lederman and N. Wolanski, Uniform estimates andlimits for a two phase parabolic singular perturbation problem, Indiana Univ.Math. J., 46 (1997), pp. 453–489.
51. L.A. Caffarelli, C. Lederman and N. Wolanski, Pointwise and viscositysolutions for the limit of a two phase parabolic singular perturbation problem,Indiana Univ. Math. J., 46 (1997), pp. 719–740.
52. P. Caputo and J.-D. Deuschel, Large deviations and variational principlefor harmonic crystals, Commun. Math. Phys., 209 (2000), pp. 595–632.
53. P. Caputo and J.-D. Deuschel, Critical large deviations in harmonic crys-tals with long-range interactions, Ann. Probab., 29 (2001), pp. 242–287.
54. P. Caputo and D. Ioffe, Finite volume approximation of the effective diffu-sion matrix: the case of independent bond disorder, preprint, 2001.
55. P. Caputo and Y. Velenik, A note on wetting transition for gradient fields,Stoch. Proc. Appl., 87 (2000), pp. 107–113.
56. E.A. Carlen, S. Kusuoka and D.W. Stroock, Upper bounds for symmetricMarkov transition functions, Ann. Inst. H. Poincare, 23 (1987), pp. 245–287.
57. J. Carr and R.L. Pego, Metastable patterns in solutions of ut = ε2uxx −
f(u), Commun. Pure Appl. Math., 42 (1989), pp. 523–576.58. R. Cerf and R. Kenyon, The low-temperature expansion of the Wulff crystal
in the 3D Ising model, Commun. Math. Phys., 222 (2001), pp. 147–179.59. R. Cerf and A. Pisztora, On the Wulff crystal in the Ising model, Ann.
Probab., 28 (2000), pp. 947–1017.

Stochastic Interface Models 157
60. R. Cerf and A. Pisztora, Phase coexistence in Ising, Potts and percolationmodels, Ann. Inst. H. Poincare, 37 (2001), pp. 643–724.
61. F. Cesi and F. Martinelli, On the layering transition of an SOS surfaceinteracting with a wall, I. equilibrium results, J. Statis. Phys., 82 (1996), pp.823–913.
62. F. Cesi and F. Martinelli, On the layering transition of an SOS surfaceinteracting with a wall, II. the Glauber dynamics, Commun. Math. Phys., 177
(1996), pp. 173–201.63. C.C. Chang and H.-T. Yau, Fluctuations of one dimensional Ginzburg-
Landau models in nonequilibrium, Commun. Math. Phys., 145 (1992), pp.209–239.
64. L. Chayes and G. Swindle, Hydrodynamic limits for one-dimensional parti-cle systems with moving boundaries, Ann. Probab., 24 (1996), pp. 559–598.
65. Y.-G. Chen, Y. Giga and S. Goto, Uniqueness and existence of viscosity so-lutions of generalized mean curvature flow equation, J. Diff. Geom., 33 (1991),pp. 749–786.
66. H. Cohn, R. Kenyon and J. Propp, A variational principle for dominotilings, J. Amer. Math. Soc., 14 (2001), pp. 297–346.
67. P. Collet, F. Dunlop, J. Fritz and T. Gobron, Langevin dynamics of asemi-infinite interface, Markov Processes Rel. Fields, 3 (1997), pp. 261–274.
68. M.G. Crandall, H. Ishii and P.-L. Lions, User’s guide to viscosity solutionsof second order partial differential equations, Bull. Amer. Math. Soc. (NewSeries), 27 (1992), pp. 1–67.
69. G. Dal Maso, An Introduction to Γ -Convergence, Birkhauser, 1993.70. E.B. Davies, Heat kernels and spectral theory, Cambridge University Press,
Cambridge, 198971. J. De Coninck, F. Dunlop and V. Rivasseau, On the microscopic validity
of the Wulff construction and of the generalized Young equation, Commun.Math. Phys., 121 (1989), pp. 401–419.
72. J. De Coninck, S. Miracle-Sole and J. Ruiz, Rigorous generalizationof Young’s law for heterogeneous and rough substrates, J. Statis. Phys., 111
(2003), pp. 107–127.73. T. Delmotte and J.-D. Deuschel, On estimating the derivatives of sym-
metric diffusions in stationary random environment, in preparation, 2002.74. F. den Hollander, F.R. Nardi, E. Olivieri and E. Scoppola, Droplet
growth for three-dimensional Kawasaki dynamics, Probab. Theory Relat.Fields, 125 (2003), pp. 153–194.
75. A. De Masi, P.A. Ferrari and J.L. Lebowitz, Reaction diffusion equationsfor interacting particle systems, J. Statis. Phys., 44 (1986), pp. 589–644.
76. A. De Masi, E. Orlandi, E. Presutti and L. Triolo, Motion by curvatureby scaling nonlocal evolution equations, J. Statis. Phys., 73 (1993), pp. 543–570.
77. A. De Masi, E. Orlandi, E. Presutti and L. Triolo, Glauber evolutionwith Kac potentials, I. Mesoscopic and macroscopic limits, interface dynamics,Nonlinearity, 7 (1994), pp. 633–696.
78. A. De Masi, A. Pellegrinotti, E. Presutti and M.E. Vares, Spatialpatterns when phases separate in an interacting particle system, Ann. Probab.,22 (1994), pp. 334–371.
79. A. De Masi and E. Presutti, Mathematical Methods for Hydrodynamic Lim-its, Lect. Notes Math., 1501 (1991), Springer.

158 T. Funaki
80. A. Dembo and O. Zeitouni, Large Deviations Techniques and Applications,2nd edition, Applications of Mathematics 38, Springer, 1998.
81. X. Descombes and E. Pechersky, Droplet shapes for a class of models in 2 at zero temperature, J. Statis. Phys., 111 (2003), pp. 129–169.82. J.-D. Deuschel, Entropic repulsion of the lattice free field, II. The 0-boundary
case, Commun. Math. Phys., 181 (1996), pp. 647–665.83. J.-D. Deuschel and G. Giacomin, Entropic repulsion for the free field: path-
wise characterization in d ≥ 3, Commun. Math. Phys., 206 (1999), pp. 447–462.
84. J.-D. Deuschel and G. Giacomin, Entropic repulsion for massless fields,Stoch. Proc. Appl., 89 (2000), pp. 333–354.
85. J.-D. Deuschel, G. Giacomin and D. Ioffe, Large deviations and concen-tration properties for ∇ϕ interface models, Probab. Theory Relat. Fields, 117
(2000), pp. 49–111.86. J.-D. Deuschel and D.W. Stroock, Large Deviations, Academic Press,
1989.87. J.-D. Deuschel and T. Nishikawa, in preparation.88. J.-D. Deuschel and Y. Velenik, Non-Gaussian surface pinned by a weak
potential, Probab. Theory Relat. Fields, 116 (2000), pp. 359–377.89. H.W. Diehl, D.M. Kroll and H. Wagner, The interface in a Ginsburg-
Landau-Wilson model: Derivation of the drumhead model in the low-temperature limit, Z. Physik B, 36 (1980), pp. 329–333.
90. R.L. Dobrushin, The description of a random field by means of conditionalprobabilities and conditions of its regularity, Theor. Probab. Appl., 13 (1968),pp. 197–224.
91. R.L. Dobrushin, Prescribing a system of random variables by conditional dis-tributions, Theor. Probab. Appl., 15 (1970), pp. 458–486.
92. R.L. Dobrushin and O. Hryniv, Fluctuations of shapes of large areas underpaths of random walks, Probab. Theory Relat. Fields, 105 (1996), pp. 423–458.
93. R.L. Dobrushin, R. Kotecky and S. Shlosman, Wulff Construction: aGlobal Shape from Local Interaction, AMS translation series, 104 (1992).
94. R.L. Dobrushin, S.B. Shlosman, Thermodynamic inequalities for the surfacetension and the geometry of the Wulff construction, In: Ideas and methodsin quantum and statistical physics (Oslo, 1988, S. Albeverio, H. Holden, T.Lindstom, eds.), Cambridge Univ. Press, 1992, pp. 461–483.
95. C. Donati-Martin and E. Pardoux, White noise driven SPDEs with reflec-tion, Probab. Theory Relat. Fields, 95 (1993), pp. 1–24.
96. M.D. Donsker and S.R.S. Varadhan, Large deviations from a hydrodynamicscaling limit, Commun. Pure Appl. Math., 42 (1989), pp. 243–270.
97. H. Doss and G. Royer, Processus de diffusion associe aux mesures de Gibbs
sur d
, Z. Wahr. verw. Gebiete, 46 (1978), pp. 107–124.98. N. Dunford and J. Schwartz, Linear Operators, Part I, Interscience, New
York, 1964.99. F. Dunlop, Stationary states and scaling shapes of one-dimensional interfaces,
J. Statis. Phys., 111 (2003), pp. 433–442.100. F. Dunlop, P.A. Ferrari and L.R.G. Fontes, A dynamic one-dimensional
interface interacting with a wall, J. Statis. Phys., 107 (2002), pp. 705–727.101. F. Dunlop, J. Magnen and V. Rivasseau, Mass generation for an interface
in the mean field regime, Ann. Inst. H. Poincare Phys. Theor., 57 (1992), pp.333–360.

Stochastic Interface Models 159
102. F. Dunlop, J. Magnen, V. Rivasseau and P. Roche, Pinning of an inter-face by a weak potential, J. Statis. Phys., 66 (1992), pp. 71–98.
103. R. Durrett, Probability: Theory and Examples, Second edition, DuxburyPress, Belmont, CA, 1996.
104. S.D. Eidel’man, Parabolic Systems (English translation), Noordhoff / North-Holland, 1969.
105. K. D. Elworthy, A. Truman, H.Z. Zhao and J.G. Gaines, Approximatetravelling waves for generalized KPP equations and classical mechanics, Proc.R. Soc. Lond. A 446 (1994), pp. 529–554.
106. L.C. Evans and R.F. Gariepy, Measure Theory and Fine Properties of Func-tions, CRC Press, Boca Raton Ann Arbor London, 1992.
107. L.C. Evans and F. Rezakhanlou, A stochastic model for growing sandpilesand its continuum limit, Commun. Math. Phys., 197 (1998), pp. 325–345.
108. L.C. Evans and J. Spruck, Motion of level sets by mean curvature I, J. Diff.Geom., 33 (1991), pp. 635–681.
109. L.C. Evans, H.M. Soner and P.E. Souganidis, Phase transitions and gen-eralized motion by mean curvature, Commun. Pure Appl. Math., 45 (1992),pp. 1097–1123.
110. G. Eyink, J.L. Lebowitz and H. Spohn, Lattice gas models in contact withstochastic reservoirs: local equilibrium and relaxation to the steady state, Com-mun. Math. Phys., 140 (1991), pp. 119–131.
111. W.G. Faris and G. Jona-Lasinio, Large fluctuations for a nonlinear heatequation with noise, J. Phys. A: Math. Gen., 15 (1982), pp. 3025–3055.
112. P.A. Ferrari, L.R.G. Fontes, B. Niederhauser and M. Vachkovskaia,The serial harness interacting with a wall, preprint, 2002.
113. R. Fernandez, J. Frohlich and A.D. Sokal, Random Walks, Critical Phe-nomena, and Triviality in Quantum Field Theory, Springer, Berlin, 1992.
114. P.C. Fife and J.B. McLeod, The approach of solutions of nonlinear diffusionequations to travelling front solutions, Arch. Rat. Mech. Anal., 65 (1977), pp.335–361.
115. P.C. Fife, Mathematical Aspects of Reacting and Diffusing Systems, Lect.Notes Biomath., 28 (1979), Springer.
116. P.C. Fife, Dynamics of Internal Layers and Diffusive Interfaces, CBMS-NSFRegional Conference Series in Appl. Math., SIAM, 1988.
117. P.C. Fife and L. Hsiao, The generation and propagation of internal layers,Nonlinear Anal., 12 (1988), pp. 19–41.
118. M.E. Fisher, Walks, walls, wetting, and melting, J. Statis. Phys., 34 (1984),pp. 667–729.
119. F. Flandoli, Deterministic attractors of ergodic stochastic flows, preprint1990.
120. I. Fonseca and M.A. Katsoulakis, Γ -convergence, minimizing movementsand generalized mean curvature evolution, Diff. Int. Eq., 8 (1995), pp. 1619–1656.
121. J.R. Fontaine, Non-perturbative methods for the study of massless models, in“Scaling and Self-similarity in Physics” (ed. Frohlich), 1983, pp. 203–226.
122. M. Freidlin, Functional Integration and Partial Differential Equations,Princeton Univ. Press, 1985.
123. M. Freidlin, Random perturbations of reaction-diffusion equations: The quasi-deterministic approximation, Trans. Amer. Math. Soc., 305 (1988), pp. 665–697.

160 T. Funaki
124. M. Freidlin, Semi-linear PDE’s and limit theorems for large deviations, in“Ecole d’Ete de Probabilites de Saint-Flour XX-1990” (ed. Hennequin), Lect.Notes Math., 1527 (1992), pp. 2–109, Springer.
125. M.I. Freidlin and A.D. Wentzell, Random perturbation of dynamical sys-tems, Springer, 1984.
126. J. Fritz, An Introduction to the Theory of Hydrodynamic Limits, Lectures inMathematical Sciences 18, The University of Tokyo, Tokyo 2001.
127. J. Fritz, Entropy pairs and compensated compactness for weakly asymmetricsystems, preprint, 2003, submitted to the Proceedings of Shonan/Kyoto meet-ings “Stochastic Analysis on Large Scale Interacting Systems” (2002) editedby T. Funaki and H. Osada, Advanced Studies in Pure Mathematics, Mathe-matical Society of Japan.
128. J. Fritz, T. Funaki and J.L. Lebowitz, Stationary states of random Hamil-tonian systems, Probab. Theory Relat. Fields, 99 (1994), pp. 211–236.
129. J. Fritz and B. Rudiger, Time dependent critical fluctuations of a one di-mensional local mean field model, Probab. Theory Relat. Fields, 103 (1995),pp. 381–407.
130. J. Frohlich, C.E. Pfister and T. Spencer, On the statistical mechanicsof surfaces, Stochastic processes in quantum theory and statistical physics(Marseille, 1981), Lect. Notes Phys., 173, pp. 169–199, Springer, 1982.
131. J. Frohlich and T. Spencer, The Kosterlitz-Thouless transition in two-dimensional abelian spin systems and the Coulomb gas, Commun. Math. Phys.,81 (1981), pp. 527–602.
132. Y. Fukai and K. Uchiyama, Potential kernel for two-dimensional randomwalk, Ann. Probab., 24 (1996), pp. 1979–1992.
133. M. Fukushima, Dirichlet forms and Markov processes, North-Holland / Ko-dansha, 1980.
134. T. Funaki, Random motion of strings and related stochastic evolution equa-tions, Nagoya Math. J., 89 (1983), pp. 129–193.
135. T. Funaki, The hydrodynamic limit for a system with interactions prescribedby Ginzburg-Landau type random Hamiltonian, Probab. Theory Relat. Fields,90 (1991), pp. 519–562.
136. T. Funaki, The reversible measures of multi-dimensional Ginzburg-Landautype continuum model, Osaka J. Math., 28 (1991), pp. 463–494.
137. T. Funaki, Regularity properties for stochastic partial differential equations ofparabolic type, Osaka J. Math., 28 (1991), pp. 495–516.
138. T. Funaki, A stochastic partial differential equation with values in a manifold,J. Funct. Anal., 109 (1992), pp. 257–288.
139. T. Funaki, The scaling limit for a stochastic PDE and the separation of phases,Probab. Theory Relat. Fields, 102 (1995), pp. 221–288.
140. T. Funaki, Equilibrium fluctuations for lattice gas, in “Ito’s Stochastic Calcu-lus and Probability Theory” (eds. Ikeda, Watanabe, Fukushima and Kunita),Springer, 1996, pp. 63–72.
141. T. Funaki, SPDE approach and log-Sobolev inequalities for continuum fieldwith two-body interactions, Proceedings of Japan-German Seminar, 1996, Hi-roshima, unpublished manuscript.
142. T. Funaki, Singular limit for reaction-diffusion equation with self-similarGaussian noise, Proceedings of Taniguchi symposium “New Trends in Stochas-tic Analysis” (eds. Elworthy, Kusuoka and Shigekawa), World Sci., 1997, pp.132–152.

Stochastic Interface Models 161
143. T. Funaki, Stochastic models for phase separation and evolution equations ofinterfaces, Sugaku Expositions, 16 (2003), pp. 97–116 (In Japanese: 50 (1998),pp. 68–85).
144. T. Funaki, Singular limit for stochastic reaction-diffusion equations,Proceedings of the workshop on nonlinear partial differential equa-tions, 1997 at Saitama University, 1998 March, 34-39, http://www.ms.u-tokyo.ac.jp/ funaki/publ/abst-others.htm.
145. T. Funaki, Free boundary problem from stochastic lattice gas model, Ann. Inst.H. Poincare, 35 (1999), pp. 573–603.
146. T. Funaki, Singular limit for stochastic reaction-diffusion equation and gen-eration of random interfaces, Acta Math. Sinica, 15 (1999), pp. 407–438.
147. T. Funaki, Recent results on the Ginzburg-Landau ∇φ interface model,In: “Hydrodynamic Limits and Related Topics”, edited by S. Feng, A.T.Lawniczak and S.R.S. Varadhan, Fields Institute Communications and Mono-graph Series, 2000, pp. 71–81.
148. T. Funaki, Hydrodynamic limit for ∇φ interface model on a wall, Probab.Theory Relat. Fields, 126 (2003), pp. 155–183.
149. T. Funaki, Zero temperature limit for interacting Brownian particles, I. Mo-tion of a single body, preprint, 2002, to appear in Ann. Probab.
150. T. Funaki, Zero temperature limit for interacting Brownian particles, II. Co-agulation in one dimension, preprint, 2002, to appear in Ann. Probab.
151. T. Funaki, Hydrodynamic limit for ∇ϕ interface model in two media, in prepa-ration.
152. T. Funaki, K. Handa and K. Uchiyama, Hydrodynamic limit of one-dimensional exclusion processes with speed change, Ann. Probab., 19 (1991),pp. 245–265.
153. T. Funaki and H. Nagai, Degenerative convergence of diffusion process to-ward a submanifold by strong drift, Stochastics, 44 (1993), pp. 1–25.
154. T. Funaki and T. Nishikawa, Large deviations for the Ginzburg-Landau ∇φ
interface model, Probab. Theory Relat. Fields, 120 (2001), pp. 535–568.155. T. Funaki and S. Olla, Fluctuations for ∇φ interface model on a wall, Stoch.
Proc. Appl., 94 (2001), pp. 1–27.156. T. Funaki and H. Sakagawa, Large deviations for ∇ϕ interface model and
derivation of free boundary problems, preprint, 2003, submitted to the Proceed-ings of Shonan/Kyoto meetings “Stochastic Analysis on Large Scale InteractingSystems” (2002) edited by T. Funaki and H. Osada, Advanced Studies in PureMathematics, Mathematical Society of Japan.
157. T. Funaki and H. Spohn, Motion by mean curvature from the Ginzburg-Landau ∇φ interface model, Commun. Math. Phys., 185 (1997), pp. 1–36.
158. T. Funaki and K. Uchiyama, From Micro to Macro 1, Mathematical Theoryof Interface Models, in Japanese. Springer-Verlag Tokyo, 2002, 283+xi pages.
159. T. Funaki, K. Uchiyama and H.T. Yau, Hydrodynamic limit for lattice gasreversible under Bernoulli measures, In: “Nonlinear Stochastic PDE’s: Hydro-dynamic Limit and Burgers’ Turbulence” (eds. T. Funaki and W.A.W. Woy-czynski), IMA volume (Univ. Minnesota) 77 (1995), pp. 1–40, Springer.
160. J. Gartner, Bistable reaction-diffusion equations and excitable media, Math.Nachr., 112 (1983), pp. 125–152.
161. K. Gawedzki and A. Kupiainen, Renormalization group study of a criticallattice model I, II, Commun. Math. Phys., 82 (1981), pp. 407–433 and 83
(1982), pp. 469–492.

162 T. Funaki
162. H.-O. Georgii, Gibbs Measures and Phase Transitions, Walter, Berlin NewYork, 1988.
163. G. Giacomin, Onset and structure of interfaces in a Kawasaki+Glauber in-teracting particle system, Probab. Theory Relat. Fields, 103 (1995), pp. 1–24.
164. G. Giacomin, Anharmonic lattices, random walks and random interfaces, inRecent research developments in statistical physics, Transworld research net-work, 1 (2000), pp. 97–118.
165. G. Giacomin, On stochastic domination in the Brascamp-Lieb framework,preprint, 2001, accepted for publication in Math. Proc. Cambridge Phil. Soc.
166. G. Giacomin, Limit theorems for random interfaces of Ginzburg-Landau type,Stochastic partial differential equations and applications (Trento, 2002), pp.235–253, Lecture Notes in Pure and Appl. Math., 227, Dekker, New York,2002.
167. G. Giacomin, Aspects of statistical mechanics of random surfaces, Notes ofthe lectures given at IHP, fall 2001, preprint, 2002.
168. G. Giacomin, J.L. Lebowitz and E. Presutti, Deterministic and stochastichydrodynamic equations arising from simple microscopic model systems, In:Stochastic Partial Differential Equations: Six Perspectives (eds R. Carmonaand B. Rozovskii), pp. 107–152, Math. Surveys Monogr., 64, AMS, 1999.
169. G. Giacomin, S. Olla and H. Spohn, Equilibrium fluctuations for ∇ϕ in-terface model, Ann. Probab., 29 (2001), pp. 1138–1172.
170. Y. Giga, A level set method for surface evolution equations, Sugaku Exposi-tions, 10 (1997), pp. 217–241 (In Japanese: 47 (1995), pp. 321–340).
171. M.-H. Giga and Y. Giga, Evolving graphs by singular weighted curvature,Arch. Rational Mech. Anal., 141 (1998), pp. 117–198.
172. M.-H. Giga and Y. Giga, A PDE Approach for Motion of Phase-Boundariesby a Singular Interfacial Energy, preprint, 2003, submitted to the Proceedingsof Shonan/Kyoto meetings “Stochastic Analysis on Large Scale InteractingSystems” (2002) edited by T. Funaki and H. Osada, Advanced Studies in PureMathematics, Mathematical Society of Japan.
173. J. Glimm and A. Jaffe, Quantum Physics, a Functional Integral Point ofView, Springer, 1981.
174. J. Gravner and J. Quastel, Internal DLA and the Stefan problem, Ann.Probab., 28 (2000), pp. 1528–1562.
175. M.Z. Guo, G.C. Papanicolaou and S.R.S. Varadhan, Nonlinear diffusionlimit for a system with nearest neighbor interactions, Commun. Math. Phys.,118 (1988), pp. 31–59.
176. M.E. Gurtin, Thermomechanics of Evolving Phase Boundaries in the Plane,Oxford Press, 1993.
177. K.P. Hadeler and F. Rothe, Travelling fronts in nonlinear diffusion equa-tions, J. Math. Biology, 2 (1975), pp. 251–263.
178. Y. Hariya, Construction of Gibbs measures for 1-dimensional continuumfields, preprint, 2002 (submitted to Probab. Theory Rel. Fields).
179. B. Helffer, Remarks on decay of correlations and Witten Laplacians,Brascamp-Lieb inequalities and semiclassical limit, J. Funct. Anal., 155 (1998),pp. 571–586.
180. B. Helffer and J. Sjostrand, On the correlation for Kac-like models in theconvex case, J. Statis. Phys., 74 (1994), pp. 349–409.
181. C. Hiergeist and R. Lipowsky, Local contacts of membranes and strings,Physica A, 244 (1997), pp. 164–175.

Stochastic Interface Models 163
182. Y. Higuchi, J. Murai and J. Wang, The Dobrushin-Hryniv theory for thetwo-dimensional lattice Widom-Rowlinson model, preprint, 2003, submittedto the Proceedings of Shonan/Kyoto meetings “Stochastic Analysis on LargeScale Interacting Systems” (2002) edited by T. Funaki and H. Osada, AdvancedStudies in Pure Mathematics, Mathematical Society of Japan.
183. P.C. Hohenberg and B.I. Halperin, Theory of dynamic critical phenomena,Rev. Mod. Phys., 49 (1977), pp. 435–475.
184. N. Ikeda and S. Watanabe, Stochastic Differential Equations and DiffusionProcesses, North Holland/Kodansha, 1981 (2nd edition 1989).
185. D. Ioffe, Large deviations for the 2D Ising model: a lower bound withoutcluster expansions, J. Statis. Phys., 74 (1994), pp. 411–432.
186. D. Ioffe, Exact large deviation bounds up to Tc for the Ising model in twodimensions, Probab. Theory Relat. Fields, 102 (1995), pp. 313–330.
187. D. Ioffe and R.H. Schonmann, Dobrushin-Kotecky-Shlosman theorem up tothe critical temperature, Commun. Math. Phys., 199 (1998), pp. 117–167.
188. D. Ioffe and Y. Velenik, A note on the decay of correlations under δ-pinning, Probab. Theory Relat. Fields, 116 (2000), pp. 379–389.
189. Y. Isozaki and N. Yoshida, Weakly pinned random walk on the wall: pathwisedescriptions of the phase transition, Stoch. Proc. Appl., 96 (2001), pp. 261–284.
190. K. Ito and H.P. McKean, Potentials and the random walk, Illinois J. Math.,4 (1960), pp. 119–132.
191. K. Iwata, Reversible measures of a P (φ)1-time evolution, In: ProbabilisticMethods in Mathematical Physics (eds. K. Ito, N. Ikeda), Proceedings, KatataKyoto 1985, pp. 195–209, Kinokuniya, Tokyo, 1987.
192. F. John, Lectures on advanced numerical analysis, Gordon and Breach, 1967.193. T. Kasai, Curvature flow added random forces, Nagoya Univ. Master Thesis,
1994.194. M.A. Katsoulakis and P.E. Souganidis, Interacting particle systems and
generalized evolution of fronts, Arch. Rat. Mech. Anal., 127 (1994), pp. 133–157.
195. M.A. Katsoulakis and P.E. Souganidis, Generalized motion by mean cur-vature as a macroscopic limit of stochastic Ising models with long range inter-actions and Glauber dynamics, Commun. Math. Phys., 169 (1995), pp. 61–97.
196. G.S. Katzenberger, Solutions of a stochastic differential equation forced ontoa manifold by a large drift, Ann. Probab., 19 (1991), pp. 1587–1628.
197. K. Kawasaki and T. Ohta, Kinetic drumhead model of interface I, Prog.Theoret. Phys., 67 (1982), pp. 147–163.
198. R. Kenyon, Dominos and the Gaussian free field, Ann. Probab., 29 (2001),pp. 1128–1137.
199. C. Kipnis and C. Landim, Scaling Limits of Interacting Particle Systems,Springer, 1999.
200. C. Kipnis, C. Landim and S. Olla, Macroscopic properties of a station-ary non-equilibrium distribution for a non-gradient interacting particle system,Ann. Inst. H. Poincare, 31 (1995), pp. 191–221.
201. C. Kipnis, S. Olla and S.R.S. Varadhan, Hydrodynamics and large devi-ation for simple exclusion processes, Commun. Pure Appl. Math., 42 (1989),pp. 115–137.
202. C. Kipnis and S.R.S. Varadhan, Central limit theorem for additive func-tionals of reversible Markov processes and applications to simple exclusions,Commun. Math. Phys., 104 (1986), pp. 1–19.

164 T. Funaki
203. M. Kishi, Potential theory, in Japanese. Morikita, 1974.204. R.V. Kohn and S. Muller, Surface energy and microstructure in coherent
phase transitions, Commun. Pure Appl. Math., 47 (1994), pp. 405–435.205. Ju.G. Kondratiev, Phase transitions in quantum models of ferromagnetics,
In “Stochastic processes, physics and geometry II”, World Sci., 1994, pp. 465–475.
206. N. Kono, Gaussian Random Fields and Their Sample Paths, in Japanese.Seminar on Probability, 48, 1978.
207. K. Komoriya, Free boundary problem from two component system on
,preprint, 2000.
208. N.V. Krylov and B.L. Rozovski, Stochastic evolution equations, J. SovietMath., 16 (1981), pp. 1233–1277.
209. H. Kunsch, Decay of correlations under Dobrushin’s uniqueness condition andits applications, Commun. Math. Phys., 84 (1982), pp. 207–222.
210. O.A. Ladyzenskaya, V.A. Solonnikov and N.N. Ural’ceva, Linear andquasilinear equations of parabolic type, American Mathematical Society, Trans-lations of mathematical monographs 23, Providence:AMS, 1968.
211. C. Landim, S. Olla and S. Volchan, Driven tracer particle in one dimen-sional symmetric simple exclusion, Commun. Math. Phys., 192 (1998), pp.287–307 .
212. C. Landim, S. Olla and H.T. Yau, First order correction for the hydro-dynamic limit of asymmetric simple exclusion processes in dimension d ≥ 3,Commun. Pure Appl. Math., 50 (1997), pp. 149–203.
213. C. Landim, S. Sethuraman and S. Varadhan, Spectral gap for zero-rangedynamics, Ann. Probab., 24 (1996), pp. 1871–1902.
214. C. Landim and H.-T. Yau, Large deviations of interacting particle systemsin infinite volume, Commun. Pure Appl. Math., 48 (1995), pp. 339–379
215. G.F. Lawler, Intersections of Random Walks, Birkhauser, Boston, 1991.216. J.L. Lebowitz and C. Maes, The effect of an external field on an interface,
entropic repulsion, J. Statis. Phys., 46 (1987), pp. 39–49.217. P. Lenz and R. Lipowsky, Stability of droplets and channels on homogeneous
and structured surfaces, Eur. Phys. J. E, 1 (2000), pp. 249–262.218. P. Lenz, W. Fenzl and R. Lipowsky, Wetting of ring-shaped surface do-
mains, Europhys. Lett., 53 (2001), pp. 618–624.219. T.M. Liggett, Interacting Particle Systems, Springer, 1985.220. T.M. Liggett, Stochastic interacting systems: contact, voter and exclusion
processes, Springer, 1999.221. P.L. Lions and P.E. Souganidis, Fully nonlinear stochastic partial differen-
tial equations: non-smooth equations and applications, C. R. Acad. Sci. ParisSer. I Math., 327 (1998), pp. 735–741.
222. P.L. Lions and P.E. Souganidis, Fully nonlinear stochastic partial differen-tial equations, C. R. Acad. Sci. Paris Ser. I Math., 326 (1998), pp. 1085–1092.
223. P.L. Lions and A.-S. Sznitman, Stochastic differential equations with reflect-ing boundary conditions, Commun. Pure Appl. Math., 37 (1984), pp. 511–537.
224. R. Lipowsky, Structured surfaces and morphological wetting transitions, In-terface Science 9 (2001), pp. 105–115.
225. R. Lipowsky, Morphological wetting transitions at chemically structured sur-faces, Current Opinion in Colloid and Interface Science 6 (2001), pp. 40–48.
226. S. Lu, Hydrodynamic scaling limits with deterministic initial configurations,Ann. Probab., 23 (1995), pp. 1831–1852.

Stochastic Interface Models 165
227. S.L. Lu and H.-T. Yau, Spectral gap and logarithmic Sobolev inequality forKawasaki and Glauber dynamics, Commun. Math. Phys., 156 (1993), pp. 399–433.
228. J. Magnen and R. Seneor, The infrared behavior of (∇ϕ)43, Ann. Phys., 152(1984), pp. 136–202.
229. A. Messager, S. Miracle-Sole and J. Ruiz, Convexity properties of thesurface tension and equilibrium crystals, J. Statis. Phys., 67 (1992), pp. 449–470.
230. L. Modica and S. Mortola, Un esempio di Γ−-convergenza, Boll. Un. Mat.Ital., (5) 14-B (1977), pp. 285–299.
231. A.A. Mogul’skii, Large deviations for trajectories of multi-dimensional ran-dom walks, Theory Probab. Appl., 21 (1976), pp. 300–315.
232. F. Morgan, Geometric Measure Theory, a Beginner’s Guide, Academic Press,1987.
233. P. de Mottoni and M. Schatzman, Geometrical evolution of developed in-terfaces, Trans. Amer. Math. Soc., 347 (1995), pp. 1533–1589.
234. C. Mueller and R. Sowers, Random travelling waves for the KPP equationwith noise, J. Funct. Anal., 128 (1995), pp. 439–498.
235. C. Mueller and R. Tribe, A phase transition for a stochastic PDE relatedto the contact process, Probab. Theory Relat. Fields, 100 (1994), pp. 131–156.
236. S. Muller, Variational models for microstructure and phase transitions, In:Calculus of variations and geometric evolution problems (Cetraro, 1996), Lect.Notes Math., 1713 (1999), Springer, pp. 85–210.
237. A. Naddaf and T. Spencer, On homogenization and scaling limit of somegradient perturbations of a massless free field, Commun. Math. Phys., 183
(1997), pp. 55–84.238. T. Nishikawa, Hydrodynamic limit for the Ginzburg-Landau ∇φ interface
model with a conservation law, J. Math. Sci. Univ. Tokyo., 9 (2002), pp. 481–519.
239. T. Nishikawa, Hydrodynamic limit for the Ginzburg-Landau ∇φ interfacemodel with boundary conditions, preprint, 2002, to appear in Probab. TheoryRel. Fields, 2003.
240. Y. Nishiura, Far-from-equilibrium dynamics, Translations of MathematicalMonographs, 209. Iwanami Series in Modern Mathematics. American Mathe-matical Society, Providence, RI, 2002, xx+311 pp.
241. D. Nualart and E. Pardoux, White noise driven quasilinear SPDEs withreflection, Probab. Theory Relat. Fields, 93 (1992), pp. 77–89.
242. T. Ohta, Instability of interfaces and pattern formation, Frontiers of Physics,10, Kyoritsu, 1985, in Japanese.
243. T. Ohta, Mathematical theory on interfacial dynamics, Nihon-Hyoronsha,1997, in Japanese.
244. T. Ohta, D. Jasnow and K. Kawasaki, Universal scaling in the motion ofrandom interfaces, Physical Review Letters, 49 (1982), pp. 1223–1226.
245. S. Olla, S.R.S. Varadhan and H.T. Yau, Hydrodynamical limit for a Hamil-tonian system with weak noise, Commun. Math. Phys., 155 (1993), pp. 523–560.
246. Y. Otobe, Stochastic reaction diffusion equations on an infinite interval withreflection, Stoch. Stoch. Rep., 74 (2002), pp. 489–516.
247. Y. Otobe, Invariant measures for SPDEs with reflection, preprint, 2001.

166 T. Funaki
248. S. Peszat, Large deviation principle for stochastic evolution equations, Probab.Theory Relat. Fields, 98 (1994), pp. 113–136.
249. V.V. Petrov, Sums of Independent Random Variables, Springer, 1975.250. C.-E. Pfister and Y. Velenik, Interface, surface tension and reentrant pin-
ning transition in the 2D Ising model, Commun. Math. Phys., 204 (1999), pp.269–312.
251. S.A. Pirogov and Ya.G. Sinai, Phase diagrams of classical lattice systems,Theor. Math. Phys., 25 (1975), pp. 1185–1192, 26 (1976), pp. 39–49.
252. A. Pisztora, Surface order large deviations for Ising, Potts and percolationmodels, Probab. Theory Relat. Fields, 104 (1996), pp. 427–466.
253. M. Prahofer and H. Spohn, Scale invariance of the PNG droplet and theAiry process, preprint, 2002.
254. J. Quastel, Diffusion of color in the simple exclusion process, Commun. PureAppl. Math. 45, 623–679 (1992).
255. M. Reed and B. Simon, Methods of Modern Mathematical Physics, vol. I:Functional Analysis, revised and enlarged edition; vol.II: Fourier Analysis, Self-Adjointness, Academic Press, New York, 1980, 1975.
256. F. Rezakhanlou, Hydrodynamic limit for a system with finite range interac-tions, Commun. Math. Phys., 129 (1990), pp. 445–480.
257. F. Rezakhanlou, Hydrodynamic limit for attractive particle systems on
d,Commun. Math. Phys., 140 (1991), pp. 417–448.
258. F. Rezakhanlou, Continuum limit for some growth models, Stoch. Proc.Appl., 101 (2002), pp. 1–41.
259. F. Rezakhanlou, Continuum limit for some growth models II, Ann. Probab.,29 (2001), pp. 1329–1372.
260. D. Ruelle, Statistical Mechanics: Rigorous Results, W. A. Benjamin, 1969.261. Y. Saito, Statistical Physics of Crystal Growth, World Sci., 1996.262. H. Sakagawa, The reversible measures of interacting diffusion system with
plural conservation laws, Markov Process. Related Fields, 7 (2001), pp. 289–300.
263. H. Sakagawa, Entropic repulsion for Gaussian field with finite range interac-tion, preprint, 2001.
264. T. Seppalainen, Existence of hydrodynamics for the totally asymmetric simpleK-exclusion process, Ann. Probab., 27 (1999), pp. 361–415.
265. S. Sheffield, Random surfaces: large deviations principles and gra-dient Gibbs measure classifications, PhD thesis, Stanford Univ., 2003,arXiv:math.PR/0304049.
266. T. Shiga and A. Shimizu, Infinite-dimensional stochastic differential equa-tions and their applications, J. Math. Kyoto Univ., 20 (1980), pp. 395–416.
267. I. Shigekawa, Stochastic Analysis, in Japanese, Iwanami, 1998.268. B. Simon, The P (φ)2 Euclidean (Quantum) Field Theory, Princeton Univ.
Press, 1974.269. B. Simon, Functional Integration and Quantum Physics, Academic Press, 1979.270. Ya.G. Sinai, Distribution of some functionals of the integral of a random walk,
Theoret. Math. Phys., 90 (1992), pp. 219–241.271. J. Sjostrand, Correlation asymptotics and Witten Laplacians, St. Petersburg
Math. J., 8 (1997), pp. 123–147.272. F. Spitzer, Principles of Random Walk, Nostrand, 1964.273. H. Spohn, Large Scale Dynamics of Interacting Particles, Springer, 1991.

Stochastic Interface Models 167
274. H. Spohn, Interface motion in models with stochastic dynamics, J. Statis.Phys., 71 (1993), pp. 1081–1132.
275. A. Stohr, Uber einige lineare partielle Differenzengleichungen mit konstantenKoeffizienten, I, II, III, Math. Nachr., 3 (1950), pp. 208–242, pp. 295–315, pp.330–357.
276. D.W. Stroock and S.R.S. Varadhan, Diffusion processes with boundaryconditions, Commun. Pure Appl. Math., 24 (1971), 147-225.
277. D.W. Stroock and S.R.S. Varadhan, Multidimensional Diffusion Pro-cesses, Springer, 1979.
278. M. Sugiura, Sharp asymptotics of diffusion processes with small parameterand applications to metastable behavior, in “Nonlinear Stochastic PDE’s: Hy-drodynamic Limit and Burgers’ Turbulence” (eds. Funaki and Woyczynski),IMA volume 77 (1995), pp. 127–136, Springer.
279. S. Takanobu and S. Watanabe, On the existence and uniqueness of diffu-sion processes with Wentzell’s boundary conditions, J. Math. Kyoto Univ., 28
(1988), pp. 71-80.280. H. Tanaka, Stochastic differential equations with reflecting boundary condition
in convex regions, Hiroshima Math. J., 9 (1979), pp. 163–177.281. H. Tanemura and N. Yoshida, Localization transition of d-friendly walkers,
Probab. Theory Relat. Fields., 125 (2003), pp. 593–608.282. R. Temam, Infinite-dimensional Dynamical Systems in Mechanics and
Physics, Springer, 1988.283. R. Tribe, Large time behavior of interface solutions to the heat equation with
Fisher-Wright white noise, Probab. Theory Relat. Fields., 102 (1995), pp. 289–311.
284. R. Tribe, A travelling wave solution to the Kolmogorov equation with noise,Stochastics, 56 (1996), pp. 317–340.
285. K. Uchiyama and T. Funaki, From Micro to Macro 2, Hydrodynamic Limitfor Lattice Gas, in Japanese. Springer-Verlag Tokyo, 2002, 303+xvi pages.
286. S.R.S. Varadhan, Large Deviations and Applications, SIAM, 1984.287. S.R.S. Varadhan, Nonlinear diffusion limit for a system with nearest neighbor
interactions - II, In: Asymptotic problems in probability theory: stochasticmodels and diffusions on fractals (eds. Elworthy and Ikeda), Longman, 1993,pp. 75–128.
288. S.R.S. Varadhan, Large deviations for the asymmtric simple exclusion pro-cess, preprint, 2002, submitted to the Proceedings of Shonan/Kyoto meetings“Stochastic Analysis on Large Scale Interacting Systems” (2002) edited by T.Funaki and H. Osada, Advanced Studies in Pure Mathematics, MathematicalSociety of Japan.
289. A. Visintin, Models of Phase Transitions, Birkhauser, 1996.290. G.S. Weiss, A free boundary problem for non-radial-symmetric quasi-linear
elliptic equations, Adv. Math. Sci. Appl., 5 (1995), pp. 497–555.291. W. Whiteley, Infinitesimally rigid polyhedra. I. Statics of frameworks, Trans.
Amer. Math. Soc., 285 (1984), pp. 431–465.292. J. Wloka, Partial differential equations, Cambridge Univ. Press, 1987.293. G. Wulff, Zur Frage der Geschwindigkeit des Wachsthums und der Auflosung
der Krystallflachen, Z. Krystallogr., 34 (1901), pp. 449–530.294. N.-K. Yip, Stochastic perturbations in curvature driven flows, Princeton Univ.
Thesis, 1996.

168 T. Funaki
295. K. Yosida, Functional Analysis, 4th edition, Springer, 1974.296. L. Zambotti, Integration by parts formulae on convex sets of paths and appli-
cations to SPDEs with reflection, Probab. Theory Relat. Fields, 123 (2002),pp. 579–600.
297. L. Zambotti, Fluctuations for a ∇φ interface model on a wall via infinitedimensional integration by parts, preprint, 2002.
298. M. Zhu, Equilibrium fluctuations for one-dimensional Ginzburg-Landau latticemodel, Nagoya Math. J., 117 (1990), pp. 63–92.
299. M. Zhu, The reversible measures of a conservative system with finite rangeinteractions, In: Nonlinear Stochastic PDEs: Hydrodynamic Limit and Burgers’Turbulence (eds. T. Funaki, W.A. Woyczynski), IMA volume 77 (1995), Univ.Minnesota, Springer, New York, pp. 53–64.