Steady-state stability in transmission systems calculation by means of equivalent circuits or circle...
9
Steady-State Stability in Transmission Systems Calculation by Means of Equivalent Circuits or Circle Diagrams BY EDITH CLARKE 1 Associate, . I. . E. Synopsis.—The maximum load on a proposed transmission system must be within the steady-state power limit of the system for stability of operation. Two methods of calculating steady state sta- bility are given in detail and illustrated by examples. (1 ) The given transmission system is replaced by a simple equivalent system, then the steady-state power limit of this equivalent system is determined graphically. (2) By means of a circle diagram the system is tested for stability with the maximum proposed load on the system. All formulas from published references necessary for the calcula- tions are included and all calculations are given in full so that similar studies can readily be made by an engineer who has not previously made a study of the subject of stability. T HE object of this paper is to give two methods of determining the stability of operation of a proposed transmission system under steady-state conditions. The calculations will be given in detail so that the engineer who has not previously made a study of the subject will have no difficulty in applying the tests for stability to his system. The first method is by means of an equivalent circuit and the second by means of a circle diagram. Both methods are based on theorems which are exact, but in order to fit the trans- mission system to the theorems certain assumptions must be made. The results will therefore be approxi- mate to the extent to which the assumptions approxi- mate actual conditions. Formerly when a transmission system was proposed, it was customary to make the line calculations for voltage regulation and losses for the maximum load conditions, and to select the generators, transformers and synchronous condensers to fit these conditions. There was nothing in such calculations to indicate that the system would be stable, but fortunately the length of line and maximum load have been such that cases of instability have been rare. At the present time when the tendency is for longer lines and greater loads, it is necessary to consider the question of stability both for steady state and transient conditions. Steady- state stability only will be considered in this paper. In steady-state stability the assumption is made that the load comes on in infinitesimal amounts so that the transient caused by one increment is over before the next increment is added. The criterion of steady- state stability is this: Assuming that the system is operating satisfactorily under the assumed load con- ditions, will it continue to operate satisfactorily if an increment of synchronous load is added and all ex- citations remain constant? When load is added there is an increase in current and a drop in voltage before there is any change in excitation. The voltage regu- lators then increase the excitations and normal voltage is obtained. If the load on the system is just the 1. Central Station Engineering Dept., General Electric Co. Abridgment of paper presented at the Midwinter Convention of the A. I. E. È., New York, Feb. 8-11, 1926. Complete copies available upon request. amount which can be transmitted at excitations which correspond to normal voltage, any increase in synchro- nous load will cause instability because the voltage must drop before the voltage regulators can increase the excitations and at the given excitations no more power can be transmitted. Therefore, when the voltage starts to drop it will continue to drop, for there is no voltage at which the load can be transmitted with those excitations. When a generator and motor are on the same bus, at no-load, neglecting no-load losses, their induced volt- ages are in phase. Keeping the excitations on motor and generator constant as the motor is gradually loaded, the phase displacement between the excitation voltages of motor and generator increases with load until the machines fall out of step. The load at which the machines fall out of step is the maximum load and the angle is the maximum power angle. This angle and the power corresponding to it can be calculated. Power corresponding to an angle greater than the maximum power angle can also be calculated although it cannot be delivered. In the simple transmission system consisting of a synchronous generator supplying power to a synchro- nous motor over a line having resistance and reactance, but no appreciable capacitance or leakance, the maxi- mum power that can be transmitted over the system, and the angle between the generator and motor excita- tion voltages corresponding to maximum power, are not difficult to calculate. This simple system will be stable under a proposed load if the phase displacement between the synchronous generator and synchronous motor excitation voltages corresponding to the proposed load is less than the phase displacement which corre- sponds to maximum power on the shaft of the motor. When a transmission system consisting of generators, lines with distributed constants, and the usual station load can be replaced by the simple transmission system, the maximum power that can be transmitted over the system is easily calculated. In studying steady-state stability by means of equivalent circuits an attempt is made to replace the complicated transmission system by the equivalent simple system. 365
Transcript of Steady-state stability in transmission systems calculation by means of equivalent circuits or circle...

Steady-State Stability in Transmission Systems Calculation by Means of Equivalent Circuits or Circle Diagrams
BY EDITH CLARKE1
Associate, Α. I. Ε. E.
Synopsis.—The maximum load on a proposed transmission system must be within the steady-state power limit of the system for stability of operation. Two methods of calculating steady state stability are given in detail and illustrated by examples. (1 ) The given transmission system is replaced by a simple equivalent system, then the steady-state power limit of this equivalent system is determined
graphically. (2) By means of a circle diagram the system is tested for stability with the maximum proposed load on the system.
All formulas from published references necessary for the calculations are included and all calculations are given in full so that similar studies can readily be made by an engineer who has not previously made a study of the subject of stability.
THE object of this paper is to give two methods of determining the stability of operation of a proposed transmission system under steady-state conditions.
The calculations will be given in detail so that the engineer who has not previously made a study of the subject will have no difficulty in applying the tests for stability to his system. The first method is by means of an equivalent circuit and the second by means of a circle diagram. Both methods are based on theorems which are exact, but in order to fit the transmission system to the theorems certain assumptions must be made. The results will therefore be approximate to the extent to which the assumptions approximate actual conditions.
Formerly when a transmission system was proposed, it was customary to make the line calculations for voltage regulation and losses for the maximum load conditions, and to select the generators, transformers and synchronous condensers to fit these conditions. There was nothing in such calculations to indicate that the system would be stable, but fortunately the length of line and maximum load have been such that cases of instability have been rare. At the present time when the tendency is for longer lines and greater loads, it is necessary to consider the question of stability both for steady state and transient conditions. Steady-state stability only will be considered in this paper.
In steady-state stability the assumption is made that the load comes on in infinitesimal amounts so that the transient caused by one increment is over before the next increment is added. The criterion of steady-state stability is this: Assuming that the system is operating satisfactorily under the assumed load conditions, will it continue to operate satisfactorily if an increment of synchronous load is added and all excitations remain constant? When load is added there is an increase in current and a drop in voltage before there is any change in excitation. The voltage regulators then increase the excitations and normal voltage is obtained. If the load on the system is just the
1. Central Station Engineering Dept., General Electric Co. Abridgment of paper presented at the Midwinter Convention of
the A. I. E. È., New York, Feb. 8-11, 1926. Complete copies available upon request.
amount which can be transmitted at excitations which correspond to normal voltage, any increase in synchronous load will cause instability because the voltage must drop before the voltage regulators can increase the excitations and at the given excitations no more power can be transmitted. Therefore, when the voltage starts to drop it will continue to drop, for there is no voltage at which the load can be transmitted with those excitations.
When a generator and motor are on the same bus, at no-load, neglecting no-load losses, their induced voltages are in phase. Keeping the excitations on motor and generator constant as the motor is gradually loaded, the phase displacement between the excitation voltages of motor and generator increases with load until the machines fall out of step. The load at which the machines fall out of step is the maximum load and the angle is the maximum power angle. This angle and the power corresponding to it can be calculated. Power corresponding to an angle greater than the maximum power angle can also be calculated although it cannot be delivered.
In the simple transmission system consisting of a synchronous generator supplying power to a synchronous motor over a line having resistance and reactance, but no appreciable capacitance or leakance, the maximum power that can be transmitted over the system, and the angle between the generator and motor excitation voltages corresponding to maximum power, are not difficult to calculate. This simple system will be stable under a proposed load if the phase displacement between the synchronous generator and synchronous motor excitation voltages corresponding to the proposed load is less than the phase displacement which corresponds to maximum power on the shaft of the motor. When a transmission system consisting of generators, lines with distributed constants, and the usual station load can be replaced by the simple transmission system, the maximum power that can be transmitted over the system is easily calculated. In studying steady-state stability by means of equivalent circuits an attempt is made to replace the complicated transmission system by the equivalent simple system.
365

366 CLARKE: STEADY-STATE STABILITY IN TRANSMISSION SYSTEMS Journal Α. I. Ε. E.
EQUIVALENT LINE Dr. E . A. Kennelly2 has shown that a line with dis
tributed constants can be replaced by either an equivalent π or Γ line in which the constants are lumped. The ж line consists of a line with a shunt at each end and the Τ line of a line with a shunt at the center. The nominal ж is formed by placing the total impedance, Z, of the actual line in the line or architrave of the ж and one-half the admittance, Y, in each shunt or pillar. The nominal Τ is formed by placing one-half the total
<
5
0 • • ~"
ι
j
л
R/x-0.
» .
\J
ς 7
•
J
V / x ' c
• (
.
5-
* / x A
ас
о
О 5000 10,000 15,000 20,000 FREQUENCY, CYCLES PER SECOND X LENGTH OF LINE, MILES
25* Ò 100 200 300 400 5Ò0 600 7Ó0 800
60 ~ 0 50 100 150 200 250 LENGTH OF LINE - MILES
300 350
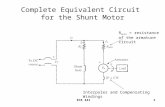
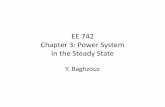
FIG. 1—COMPLEX HYPERBOLIC FUNCTIONS . Z Y
cosh V 1 Y = 1 + — 9 - + sinh V Ζ У
= 1 +
2
Z Y
• — di + j a2
= 0 1 + 0 2 tanh V Ζ Y12
— 7 1 + j 7 2 . V Ζ Y/2
impedance of the actual line in each arm of the Τ and the total admittance in the shunt or staff. The nominal π and Τ lines are not exact equivalents of the actual line, but by applying correcting factors to them the equivalent ж and Τ lines are obtained which are exact equivalents of the actual line.
Correcting Factors for Converting the Nominal ж or Τ Line Into the Equivalent ж or T. The correcting factors which must be applied to convert the nominal π or Г
into the equivalent π or Г are = = — to be ap-л/ Ζ Y
plied to the architrave of the ж and the staff of the Τ and tanh (V Ζ Y/2)
VZY/2 and the arms of the T,
to be applied to the pillars of the ж
2. "Application of Hyperbolic Functions to Electric Engineering Problems.* '
Fig. 1 gives the real and imaginary parts of these correcting factors. For convenience the real and imaginary parts of cosh у/ ZY are also given.
Power at a Point Within the Equivalent ж. The 7T-line viewed from either end is an exact equivalent of the line with distributed constants but the current and voltage at any point in the architrave of the ж do not correspond to current and voltage on the actual line. Let the 7r-line in Fig. 2 be the equivalent ж of the line A В with distributed constants. Although the current at d is the same as the current at B, the current at с has no counterpart in the actual line. The power at d is the same as the power at B, but the power at с is the power at d plus the power lost in shunt Z 4 . When the power is known at b and с it can be calculated at a and d.
SYNCHRONOUS IMPEDANCE
It is understood that the synchronous impedance of a synchronous generator or motor is not constant. However, given the characteristics of the machine and the conditions of operation, it is possible to find an equivalent synchronous impedance which may be considered constant for the case under consideration. In the work which follows constant synchronous impedance refers to this equivalent synchronous impedance.
For the synchronous condenser it is necessary to find an equivalent excitation as well as an equivalent synchronous impedance. This is discussed at greater length in Appendix E .
EQUIVALENT GENERATOR If a system consist of a synchronous generator and
synchronous motor, both of constant synchronous impedance, connected by a line with a shunt at the generator end, this system can be replaced for all points beyond the shunt by a system unchanged beyond the shunt, but having a new generator whose impedance is the impedance of the generator and shunt in parallel and whose excitation voltage
ζ,φγ,
FIG. 2—A. LINE A В WITH DISTRIBUTED CONSTANTS B. EQUIVALENT ж = LINE
is the Ζ Ζ Ζ
Ε ι ' = E l z ^ + é 8
/ Z l = E l ζ ^ + ζ : w h e r e Ε ι
actual generator excitation voltage, Zi is the generator impedance and Z8 is the shunt impedance.
This will be an exact equivalent, for the power at breakdown on the two systems will be same. The proof is given in Appendix С (ò).
EQUIVALENT MOTOR If a system consist of a synchronous generator and
synchronous motor, both of constant synchronous

Aprü 1 9 2 6 C L A R K E : S T E A D Y - S T A T E S T A B I L I T Y I N T R A N S M I S S I O N S Y S T E M S 3 6 7
impedance, connected by a line with a shunt at the motor end this system can be replaced for all points in front of the shunt by a system unchanged up to the shunt, but having a new motor whose impedance is the impedance of the motor and shunt in parallel
Z2 Ζ $ and whose excitation voltage E2 = E2 —^—, „ /Z2
L 2 + Z ,
z. = E2-¿—, Г7 , where E2 is the actual motor excitation voltage, Z2 is the motor impedance and Za is the shunt impedance; but power on the fictitious system corresponding to breakdown power on the actual system occurs when the phase displacement between the generator and equivalent motor excitation voltages is the total impedance angle of the fictitious system plus the angle, 2 (0 2 — θ2'), where 0 2 is the impedance angle of the actual motor and 0 2 ' is the impedance angle of the equivalent motor. The proof is given in Appendix С (6).
EQUIVALENT SYSTEM AND VOLTAGE REGULATORS If a system consists of a synchronous generator and
synchronous motor, both of constant synchronous impedance, connected by a line with a shunt at each end, voltage being maintained at the ends of the line, ¿his system can be replaced for all points of the line by a system consisting of the same line without shunts, a generator whose impedance is the impedance of the actual generator and shunt at the generator end in parallel and a motor whose impedance is the impedance of the actual motor and shunt at the motor end in parallel; but power on the fictitious system corresponding to breakdown power on the actual system occurs when the phase displacement between equivalent motor and generator excitation voltages is the total impedance angle of the fictitious system plus 2 (0 2 — θ2) where 0 2 is the impedance angle of the actual motor and 0 2 ' the impedance angle of the equivalent motor. The proof is given in Appendix D.
When 2 (0 2 — 02') = 0 deg., the fictitious system becomes an equivalent system, for the power at breakdown on the two systems will be the same. When resistance is neglected in the motor and motor end shunt 2 (02 - 02') = 0 deg. or 360 deg.
Since no limitation is placed on the shunt impedances in the proofs given in the appendix, in addition to representing the capacitance in the line, they may represent reactors, resistance load or any other dead load.
EQUIVALENT CIRCUIT METHOD Graphical Solution. When the actual system has
been replaced by the equivalent simple system, the maximum power which can be transmitted may be obtained graphically.
Let Fig. 3A represent the simple equivalent system, where
Zb = r + j χ = the impedance of the equivalent line. Zi = ri + j xi = the actual generator impedance. Ζχ = ri+ j Xi = the equivalent generator impe
dance formed by taking the shunts at the generator end of the line in parallel with the generator impedance.
Z2 = r2 + j x2 = the actual motor impedance. Z2 = r2 + j x2 = the equivalent motor impedance
formed by taking the shunts at the motor end of the line in parallel with the motor impedance.
Ei = excitation voltage of the actual generator. E2 = excitation voltage of the actual motor. Ei = excitation voltage of the equivalent generator
E2 = excitation voltage of the equivalent motor
E A = terminal voltage at the generator end of the line.
ζ ί Α Ζ Δ в ζ; A
E , H W W — Ч Ж — • — — Ό Η Ρ — • WW—im-E't
Fia. 3 — A . EQUIVALENT TRANSMISSION SYSTEM B . GRAPHICAL DETERMINATION OP MAXIMUM POWER
OVER THE EQUIVALENT TRANSMISSION SYSTEM
EB = terminal voltage at the receiver end of the line. Zt = (r +jx + n' +jxi' +r2' + jx2') =Rt+jXt
= zt ejet
= total impedance of the equivalent system.
0< = tan- 1 —ñ— = total impedance angle.
0 2 = t a n - 1 = impedance angle of the actual τ2
motor. x2
02 ' = t a n - 1 ;— impedance angle of the equiva-τ2
lent motor. Calculate a' = 0, + 2 (0 2 - 02') Since there are no shunts in the equivalent or ficti
tious system the same current will flow in all parts of the circuit. Taking current as standard phase, lay off Q Β Α Ρ = I (τ2' + j x2')+I (r + j x)+I (rV + ; xx')
= Z I

368 CLARKE: STEADY-STATE STABILITY I N TRANSMISSION SYSTEMS Journal Α. I. Ε. E.
to any convenient scale. Fig. Зв. The value of this scale will be determined when the construction has been completed and the position of point 0 determined.
There are two conditions which determined the position of point 0.
1. a' = 6t + 2 ( 0 2 - 0 2 ' ) 2. The ratio between the magnitudes of E K and E B
or between E \ and E 2 is known. For a regulated line E A and E B are given, and for a line without voltage regulators £ \ ' and E 2 can be calculated from the known values Ε λ and E 2 .
Consider the case of the regulated line: To satisfy the first condition join Ρ and Q and at Ρ drawn Ρ R making an angle, (90° -a') with PQ. With R, the intersection of Ρ R with the perpendicular bisector of P Q, as a center and R Ρ as radius describe arc Ρ Q. If point 0 lies on this arc, the first condition will be satisfied. To satisfy the second condition, find a series of points whose distances from A and В are in the ratio EA/EB and draw a curve through them. О will lie on the intersection of this curve with the arc Ρ Q.
The scale of the vector diagram is determined, for О В = Ев. All voltage drops are now given in terms of Ев. Ев is known, therefore all voltage drops are known and the current can be calculated. The power factor angle, 0, can be measured.
Maximum Power at В = Ев . / . cos θ. The impedances, voltages and currents may be
expressed in ohms, volts and amperes respectively or in per cent, as is most convenient.
Algebraic Solution—Resístame Neglected. When resistance is neglected and equal voltages are maintained at the ends of the line a simple formula can be derived for the power delivered. If
= the equivalent generator reactance. = the equivalent motor reactance. = the equivalent line reactance. = У в = magnitude of line terminal voltages,
E A and Ев.
X VA
( 4 ) , + ( * ' , + 4 ) ( ' · , + 4 - )
(ir
When У в is in volts to neutral, and reactances are in ohms, power will be in watts per phase. If voltages and reactances are in per cent, power will be in per cent (20% = 0.20).
When У в = 100 per cent and the motor and generator have the same impedance {Xx = X2)f equation (1) becomes
X X i ' + -γ-
Ρ max = ~ I 77 : (2)
When X = O, which is the case for a motor and generator on the same bus,
Ρmax = g ι (3)
When Xi' = X2 = 0, which is the case for infinite busses at the ends of the line,
_ _ 1 _ Ρ max — j£ (4)
APPLICATION OF THE FICTITIOUS OR EQUIVALENT SYSTEM TO STEADY STATE STABILITY PROBLEMS
1. Effect of Capacitarne in the Line. If resistance is neglected and generator and motor of equal impedances are assumed, equation (2) may be used to calculate maximum power over the line with and without capacitance. Without capacitance, Xi will be the actual generator impedance. Capacitance in the line
( - § - ) + ( * • ' + 4 - ) •This equation was first developed by C. A. Nickle.
v 0 20 40 60 80 100 120 PER CENT IMPEDANCE OF GENERATOR
AND TRANSFORMER ON 100,000 Kv-a. BASE
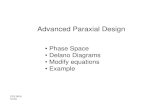
FIG. 5—MAXIMUM SYNCHRONOUS LOAD DELIVERED OVER 2 2 0 -Kv., 6 0 CYCLE, TRANSMISSION LINES OF VARIOUS LENGTHS
When resistance is neglected. Synchronous generators and motors assumed to have equal synchronous impedances. (Transformer impedance included in generator impedance)
will reduce X, since X is multiplied by the correcting factor β which is less than unity, but it will increase X / , for when the negative reactances of the shunts of the equivalent π-line are combined in parallel with the positive reactances of the machines, the equivalent reactances are greater than the actual machine reactances. The effect of capacitance will be to increase or decrease the maximum power depending upon whether the change in X or in X / has the greater influence.
CURVES FOR ESTIMATING MAXIMUM POWER The curves in Fig. 5 were calculated for 60 cycles and
various lengths of line, assuming reactance of 0 .813 mhos per mile and capacity susceptance of 5 .22 χ IO - 6
mhos per mile, 220 kv. was maintained at each end of the line, resistance was neglected in the line and in the generators and motors which were assumed of equal synchronous impedances. These curves can be used as a first approximation.

April 1 9 2 6 C L A R K E : S T E A D Y - S T A T E S T A B I L I T Y I N T R A N S M I S S I O N S Y S T E M S 369
2. Reactor Across the Generator Terminals. If a reactor is placed across the generator terminals the effect is opposite to the effect produced by the capacity shunt. The reactor reduces the equivalent generator impedance so that more power can be transmitted over the system. It must be remembered that the excitation on the generator is increased by the use of a reactor, but when full field is not being used on the generator, a reactor increases the power that can be transmitted by the same amount that a generator of the same rating would do. Since reactors are cheaper than generators, a reactor of the size that would put full excitation on the generator can be used to advantage to increase the stability of the system.
3. ' Power Limits of a Long Line. a. Limit of the line alone. b. Limit of the line and transformers. c. Limit of the line transformers and generator. d. Limit of the system with various kinds of load.
1. Synchronous motors. 2. Lights and synchronous motors. 3. Lights, induction motors, synchronous
motors and synchronous condensers. 4. Same as (3) but with a generator supplying
local load. A line with generator and transformers will be selected
then the maximum power will be obtained for the specified conditions.
Given: A three phase, 60 cycle, 250 mile line. Line constants: r = 0.151 ohms per mile
χ = 0.813 ohms per mile y = 5.22 micro-mhos per mile Leakance = 0.
Step-up transformers: 270,000 kv-a. total 2 per cent resistance 12 per cent reactance 13,200—220,000 volts.
Step-down transformers: 240,000 kv-a. total, 2 per cent resistance 12 per cent reactance 210,000-13,200 volts
Generators: 270,000 kv-a. total 0.9 power factor, 13,200 volts 100 per cent synchronous impedance.
Voltage regulators will maintain 220 kv. and 200 kv. at the generator and receiver ends respectively on the low sides of the transformers (assuming a one-to-one ratio of transformation). The magnetizing current in the transformers will be neglected.
From equation (7) Appendix С (α).
Vi v 2 v 2
Ртах = (1 — ~Ττ~ cos 0), where Vi and V2
Ζ Vi
are terminal voltages at the generator and receiver ends respectively, Ζ is total impedance, and 0 is total impedance angle.
When Vi and V2 are in volts to neutral and Ζ is in ohms, power will be in watts per phase. If voltages and impedances are in per cent, power will be in per cent (20 per cent = 0.20).
When Vi and V2 are bus voltages, Ζ the total impedance between the buses and 0 the total impedance angle, Pmax will be the maximum power that can be exchanged between the buses.
EN »»»»» WW ji (34.5+j 194.6) Ohms ε
FIG. 6—EQUIVALENT *• OF THE TRANSMISSION LINE ALONE
Z6=(89.6+j232.1)Ohms ; Ш 4
2 S
I G "
§ Ö I
FIG. 9—EQUIVALENT Τ OF THE LINE AND TRANSFORMERS
When Vi and V2 are excitation voltages of synchronous generator and synchronous motor respectively, Ζ the total impedance between them and 0 the total impedance angle, Pmax will be the synchronizing power between the two machines.
Fig. 6 gives the equivalent π of the line alone. Fig. 9 gives the equivalent τ of the line and transformers.
The maximum power which can be transmitted over the line alone and over the line with transformers may be obtained by subtracting the power lost in the receiver shunt from the total power which can be exchanged between the buses.
(a) The limit of the line alone = 187,000 kw. (b) The limit of the line with transformers =
158,500 kv.
£i- j 179.2 Ohms A
Ei—ΊΒΗΡ - V W W — B d
¡Z¿«(39.6+j232.1)0hms - /6Ö6Ö V-E 2
Z 2
FIG. 11—EQUIVALENT *• OF THE LINE AND TRANSFORMERS
With synchronous generator and motor. Impedances are in ohms referred to the high side.
(c) Limit of the line, transformers and generator is obtained by assuming a motor of zero impedance or an infinite bus at the receiver end.
Fig. 11 represents the line with end shunts and a motor and generator each of constant synchronous impedance. The power at d, that is the power de-

370 CLARKE: STEADY-STATE STABILITY I N TRANSMISSION SYSTEMS Journal Α. I. Ε. E.
livered to the load, will be the power at с minus the power lost in Z 4 . Fig. 12 gives the equivalent circuit with the impedances in per cent on a 100,000 kv-a. base. 100 per cent voltage = 200 kv. The shunt Z 3 has been combined in parallel with the generator impedance. The shunt Z 3 has not been combined with the motor impedance.
ΖΊ· (0.04+j 51.1) % Z,« (9.9+j 58.0) %
В d Z 2
FIG. 12—EQUIVALENT CIRCUIT OF LINE, TRANSFORMERS, GENERATOR AND MOTOR
Impedances are in per cent on a lOO.OOO-kv-a. base. 100 per cent voltage - 200 kv.
The voltages~and impedances in per cent from Fig. 12 are E A = 110 per cent, Ев = 100 per cent, Z / = (0.04 + j 51.1) per cent, Z 2 ' = О Z 5 = (9.9 + j 58.0) per cent, Z 5 + Z / + Zt' = (9.9 +j 109.1) percent = Zt
a' = maximum power angle = 6\ + 2 (02— 6Y) = 6\ 109.1
= tan- 1
9.94 = 84.7 deg.
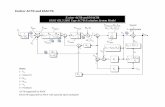
Making the graphical construction as described above, Fig. 13 is obtained. From Fig. 13
BP Since О В = 100 per cent Voltage, I = •—> /tt О В
1.845 1.095 = 1.685 = 168.5 per cent current.
FIG.
χ o:
13—GRAPHICAL DETERMINATION OF MAXIMUM POWER WITH AN INFINITE Bus AT THE RECEIVER END
Power factor at В = 0.84 lead. Power at с = 1 X 1.685 X 0.84 = 1.415
= 141.5 per cent on 100,000 kv-a. base = 141,500 kw.
Power lost in shunt Z 4 = 180 kw. Limit ofthe line, transformers and generators = 141,300 kw.
d. Limit of the system with various kinds of load. 1. Synchronous motor load of total capacity 170,000
kv-a., 85 per cent synchronous impedance.
Z 2 = motor impedance on 100,000 kv-a. base = 50 per cent
ZJ = Z2 Z4
Z2 + Z4 = impedance of equivalent motor
= (0.07 + ; 57.8) percent Fig. 14 gives the equivalent circuit.
Zt = total impedance = (10.0 + j 166.9) per cent. 6\ = total impedance angle = 86.6 deg. 0 2 = impedance angle of actual motor = 90 deg.
Z 6=(9.9+j58.0)7. E¡-WW—<№—-—WW TO—£—WW—W-E2
Zi» (0.04+J51.1)'/. A . В Z ; s ( 0 . 0 7 + j 5 7 . 8 ) Z
FIG. 14—EQUIVALENT CIRCUIT FOR SYNCHRONOUS MOTOR LOAD
0 2 ' = impedance angle of equivalent motor = 89.9 deg. 2 (0 2 - 02') = 0.2 deg. a' = et + 2 (0 2 - 0/) = 86.7 deg.
Using the equivalent circuit given in Fig 14 and. making the graphical construction as described above, Fig. 15 is obtained.
Since О В = 100 per cent voltage, I = 112.5 per cent current and Power factor at В = 0.943 lead. Power at с = 1 X 1.125 X 0.943 = 1.06
= 106,000 kw. Power lost in shunt Z 4 = 180 kw. Maximum power that can be delivered to the load
= 106,000 kw.
FIG. 15—GRAPHICAL DETERMINATION OF MAXIMUM POWER FOR A SYNCHRONOUS MOTOR LOAD
2. Resistance load of 30,000 kw., synchronous motors of total capacity 170,000 kv-a. with 85 per cent synchronous impedance. R = resistance of the resistance load shunt.
= 1333 ohms. = 333.3 per cent on 100,000 kv-a. ; base,'200 kv.
ZA = impedance of Z 4andÄin parallel = (184 — /165) per cent

Aprii 1 9 2 6 C L A R K E : S T E A D Y - S T A T E S T A B I L I T Y I N T R A N S M I S S I O N S Y S T E M S 371
Ζ2 = impedance of actual motor = 50 per cent Ζ2 Z±
Ζ г = ~—¡—7Г~, = impedance of equivalent motor L2 -Г ¿ 4
= (9.8 + j 56.1) per cent Zt = total impedance of equivalent circuit = (19.74
+ j 165.2) per cent θι = 83.2 deg. = total impedance angle, α' = βι + 2 (02 - 02') = 83.2deg. + 2 (90- 80.1deg.)
= 103.0 deg. The graphical construction is given in Fig. 16.
Since О ß = 100 per cent I = 138.5 per cent and power factor at В
= 0.90 lead Power at с = 1 X 1.385 X 0.90 = 1.248
= 124,800 kw. Power lost in the line shunt ZA = 180 kw. Maximum power that can be delivered to the load
= 124,600 kw.
ρ
Q
FIG. 1 6 -GRAPHICAL DETERMINATION OP MAXIMUM POWER FOR A LOAD PARTLY RESISTANCE AND PARTLY SYNCHRONOUS
3. Lights, induction motors, synchronous motors and synchronous condensers.
4. Same as (3) but with generator supplying local load.
As voltage drops on an induction motor load, the power required by the load remains practically constant and the power factor becomes less lagging. A lightly loaded synchronous motor has the same characteristics. The induction motor load therefore, may be replaced by an approximately equivalent synchronous motor.
A method of treating the synchronous condenser in the equivalent circuit is given in Appendix E.
Examples of type (3) can be solved by the equivalent circuit method but the solution with the circle diagram is more satisfactory than the solution by the equivalent circuit method available at present. An example of type (4) is solved by the circle diagram method. See example (3) following. It is hoped that systems more complicated than the one considered here as well as
examples of types (3) and (4), will eventually be completely represented by equivalent circuits.
CIRCLE DIAGRAM METHOD
The test for stability by this method is to assume a slight increase in load and to determine if by a drop in receiver voltage this new load can be carried with the excitations corresponding to the original load.
When a system is operating at normal voltage ana а load is added there is an increase in current at the receiver end and a drop in voltage. The power given to the additional load comes from the change in phase displacement between the sending and receiving end equipment. Due to the drop in voltage at the load, the original load does not require the same power it required at normal voltage if it is the average station load. The kw. and kv-a. taken by the original load changes with voltage. If voltage slightly less than normal is assumed at the receiver end and the kw. and kv-a. corresponding to the original load at this voltage plus a small load increment can be transmitted over the line with the given generator excitation, the system is stable, for the small increment is the contribution to the additional load made by the change in phase displacement of the system. For the limit of stability this increment approaches zero.
The method of obtaining the general circuit constants of a transmission system, and the construction of the power circle diagram from these constants has been described by Mr. R. D. Evans and Mr. H. K. Sels in a paper4 before the Institute.
GENERAL CIRCUIT CONSTANTS The same line, transformers and generator used to
illustrate the equivalent circuit method will be used for the circle diagram.
The constants of the line alone are: A = D = cosh VY~Z = αϊ + ja2 = 0.8700 + ; 0.0236
sinh y/ZY Β = Ζ =— = Ζ(βι + jß2) = 34.52 + j 194.6
\ / Z Y
sinh y/ZY С = Y v — = Y(ß!+jß2)
= ( - 0.0104 + j 1.248) IO"3
(a i , a2, ßi and β2 obtained from Fig. 1.) The circuit constants of the line and the step-up and
step-down transformers, neglecting magnetizing currents are calculated from Item (g) of the Evans and Sels paper.6 To include magnetizing current Item (j) should be used instead of (g). A 0 - A + CZ8 = 0.8431 + j0.0279 Bo = В + A (Z8 + Zr) + CZ8Zr = 39.6 +j 232.1 Co = С = ( - 0.0104 + j 1.248) 10"3
D0 = A + CZZ = 0.8424 +j 0.0280 Za and Zr are the transformer impedances at the
sending and receiving ends respectively. 4 . Power Limitation of Transmission Systems, TRANSACTIONS
of the A . I . E . E . , Vol. 4 3 , 1 9 2 4 , page 3 3 .

372 CLARKE: STEADY-STATE STABILITY I N TRANSMISSION SYSTEMS Journal Α. I. Ε. E.
It is of interest to note that these constants can be obtained from the equivalent ж including the line and transformer or the equivalent ж can be obtained from these constants. See Appendix F.
The circuit constants including the generator as well as the line and transformers are
Aoo = A 0 + Z i Co = 0.6193 + j 0.0260 Boo = Z i Do + Bo = 34.59 + j 383.1
Where A 0, B o , C 0 and D 0 refer to the circuit constants of the line and transformers and Z i is the generator impedance.
CONSTRUCTION OF THE CIRCLE DIAGRAM
(PR + l ER*)* + (QR + m ER*)2 = П2 ER2 E2*
is the equation of the Receiver Power Circle Diagram in volt-amperes. If the question is expressed in kilovolt amperes and divided by ER* it becomes / PR \ 2 / QR V / Et \2
This is a circle for receiver power in terms of the receiver voltage and the ratio between the sending and receiving voltages. The center of the circle is at the point - I 103, - m IO3. If
A 0 = αϊ + j a 2
and Bo = Ro + j Xo
ax Rp + 0*2 Xq
' = Д о 2 + X o 2
d\ Xo — 02 Ro
m = Ro2 + Xo2
1 Π = ;
VRo2 + Xo2
Two circle diagrams will be drawn; one for the line and transformers and the other for the line, transformers and generator. Since they are both for power at the receiver end in terms or receiver end voltage, they will be drawn on the same chart. The ratio of the voltage on the low side of the transformer at the generator end to the voltage on the low side at the receiver end for normal operation has been assumed 220/200 = 1.1. One circle with E8/Er = 1.1 will be drawn in the diagram for the line and transformers. A series of circles with the ratio of the excitation voltage of the generator to the receiver voltage having various values will be drawn for the line, transformers and generator.
The problems already solved by means of the equivalent circuit will now be solved by the circle diagram.
b. The power limit of the line and transformers at the specified voltages is obtained from the dotted circle at the point where the tangent to the circle is vertical.
*Equation ( 2 8 ) Α . I . E. E. TRANSACTIONS, Vol. 43, page 36. fCircle Diagrams for Transmission Systems, R. D . Evans
and H . K. Sels, Electric Journal, December 1921.
At this point kw r/kv r
2 = 3.95, and kw r = 3.95 Χ (200)2
= 158,000 kw. c. The power limit of the generator, line and trans
formers is obtained from the dotted curve at the point where the tangent to the solid circle is vertical. At this point kw r/kv r
2 = 3.53, and kw r = 3.54 Χ (200)2 = 141,200 kw.
The limit of the system with various kinds of load can not be determined directly by means of the circle diagram. A certain load must be assumed and then the system tested for stability with this load. If the system is stable, a larger load should be assumed, but if unstable, a test should be made with a smaller load. If this process is continued until a load is obtained for which the system is stable, but for which there is no margin, this will be the maximum power of the system.
To TEST FOR STABILITY ON THE CIRCLE DIAGRAMS
Calculate kw r/kv r
2 for the given load at normal voltage and find the corresponding point on the dotted circle. The ratio of generator excitation voltage to receiver voltage is read from the solid circle cutting the dotted circle at this point, and the generator excitation voltage calculated. Assume a receiver voltage slightly less than normal and calculate the active and reactive power of the load corresponding to this voltage, assuming constants excitations. Divide the active and reactive power in kilovolt amperes by the square of the assumed receiver voltage in kilovolts and locate the point on the diagram. Read Ei/Er at this point and calculate Eh the generator excitation voltage. If this value of Ε χ is equal to or less than the excitation voltage calculated at normal voltage the system is stable. It is sometimes more satisfactory to select a receiver voltage slightly above normal as well as one below normal, then when the corresponding calculated generator excitation voltages are both higher than the excitation voltage corresponding to normal receiver voltage, the assumed load is the power limit.
1. Given: 170,000 kv-a. synchronous motor, 85 per cent synchronous impedance.
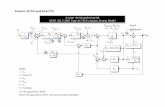
It has been shown by the equivalent circuit method that 106,000 kw. is the maximum power that can be delivered to this motor. Testing by means of the circle diagram, Fig. 17, for a load of 106,000 kw., point A, located on the dotted circle for kw r/kv r
2 = 2.65, gives the generator excitation voltage from the solid circle passing through A as 242 kv. at normal receiver voltage. Point A' corresponds to 98 per cent receiver voltage and A " to 102 per cent receiver voltage. The corresponding generator excitation voltage in each case is just about 242 kv. which indicates that 106,000 kw. is very near the limit of stability.
2. Given: Resistance load of 30,000 kw., and the synchronous motor of example 1.
The power delivered to a resistance load varies as the square of the voltage. The power delivered to a shaft load is practically independent of voltage. Points

April 1926 C L A R K E : S T E A D Y - S T A T E S T A B I L I T Y I N T R A N S M I S S I O N S Y S T E M S 3 7 3
B, B' and B" on the circle diagram give the generator excitation voltages corresponding to receiver voltages of 100 per cent, 98 per cent and 102 per cent respectively for a load of 120,000 kw., and points С, C" and C" the corresponding values for a load of 130,000 kw. The system is stable at 120,000 kw. but unstable at 130,000 kw.
3. Given: Total load of 180,000 kw. of which one-third is resistance load, one-third induction motor load and one-third synchronous motor load, The induction motors have an average power factor of 0.7 lag at normal voltage. The synchronous motors have 100 per cent synchronous impedance, are 75 per cent loaded and are operated at unity power factor. A 100,000 kv-a. synchronous condenser is placed at the load. The generators at the receiver end of the line, having total capacity of 100,000 kv-a. and synchronous impedance of 100 per cent, supply 45,000 kw. to the load and part of the reactive kv-a. needed for voltage regulation. Is the system stable?
1 \ I \
1 0 :|orKv »,/KV; \ À LA
X * A' 5
л ц \
1
LEAD
II 1
f i D _» о D
2
or K
v-a1
E. /E , • 1.0 12 I 7 V 7 ω / / / /
3 У / / 0
4 / / 1 1 FIG. 1 7 — C I R C L E DIAGRAM FOR THE TRANSMISSION SYSTEM
Er Pr
Pr Ε2
Qr_ E2
100 Per Cent Receiver Voltage 200 kv. = 100 per cent receiver voltage. 135,000 kw. = total power over the line.
kw r
kv r
2 = 3.375, determines location of
point D on dotted circle, Fig. 17.
1.28 read at point D, Fig. 17.
Qr = 51,200 kv-a. = total reactive power over the line.
Ει/Er = 1.385, obtained from solid circle passing through D.
Ex = 277 kv. = excitation voltage of generator at sending end.
98% Receiver Voltage. Er = 196 kv. = 98 per cent voltage
Pr
Qr
Pr+Qr Er
2
= 132,600 kw. ] active and reactive power I of the original load at 98 per
= 57,270 kv-a. J cent receiver voltage and constant excitations.
=3.45+У 1.49, determines location of point D'
Ει/Er = 1.41, obtained from solid circle passing through D'.
Ei = 276 kv., excitation voltage of generator at thesendingend.
Since Eu the calculated generator excitation voltage, at 98 per cent receiver-voltage is less than Ei at 100 per cent receiver voltage for the same receiver load, the system is stable. These calculations do not indicate the load whiéh can be added with stability maintained. They merely indicate that the system is stable under the assumed load conditions.
In the examples which have been considered a single generating station supplies power over one circuit to a single receiving station. In more complicated systems where it may be necessary to cut and try, the circle diagram can be used to advantage for the various parts of the system.
ACKNOWLEDGMENT The idea of combining the shunts at the ends of the
line with the synchronous apparatus is due to Mr. C. A . Nickle who proved that "neglecting resistance, a line with synchronous apparatus and reactance or capacitance shunts may be replaced by a line and equivalent synchronous apparatus with no shunts."
The writer wishes gratefully to acknowledge her indebtedness to Messrs. H. H. Dewey and R. E. Doherty for their encouragement and suggestions which have broadened the scope of this study, and to Mr. Nickle for his suggestions in the development of certain phases of the subject.
PURER IRON PRODUCED ELECTRICALLY
Pig iron is now the basic form from which all types of iron and steel are made but it may become obsolete and the direct manufacture of malleable iron and steel from ore may follow the invention of a special electric furnace of commercial size that has been built in the great Hagfors, Stockholm, Sweden, ironworks where iron ore and coal mixed and fused have been made to produce pure iron containing only two per cent of carbon, and steel- that can be worked in the usual manner.
The new process is continuous and fusion ceases only temporarily when the furnace is tapped, while the absence of gases and slag produces a superior product.
The United States leads the world in the number of / electric steel furnaces in use, and with the discovery of a
process of making iron and steel directly from ore would give a tremendous impetus to the use of the electrical smelting furnace.