Radar CW com receptor IF - UMa
14
51 Radar CW com receptor IF Receptor superheterodino de banda lateral
Transcript of Radar CW com receptor IF - UMa

51
Radar CW com receptor IF
Receptor superheterodino de banda lateral

52
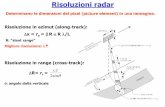
Largura de banda do receptor
(b) Espectro dum eco sinusoidal de duração finita:sin[π(f-f0)δ]/π(f-f0) (f0: frequência, d: duração da onda)
Espectro de frequência duma oscilação de onda contínua(a) de duração infinita (b) de duração finita

53
Banco de filtros Doppler IF
(a) Banco de filtros Doppler IF
(b) Resposta em frequência do banco de filtros Doppler

54
Banco de filtros vídeo
• Caso o banco de filtros seja usado após o detector vídeo:– A melhoria na relação S/N não vai ser tão boa– Mede-se fd mas perde-se o seu sinal.– Necessita de apenas metade dos filtros.– Existe um método para recuperar o sinal da
velocidade quando queremos saber se o alvo se está a aproximar ou a afastar.

55
Recuperar sinal de fd
– Em algumas aplicações de radar de onda contínua é importante saber se o alvo está a aproximar-se ou a afastar-se.
– Isso consegue-se usando filtros separados em cada lado da frequência intermédia. Se a frequência de eco estiver abaixo da portadora o alvo está a afastar-se. Caso contrário, está a aproximar-se (casos (c) e (b) ).
Espectro dos sinais recebidos

56
Recuperar sinal de fd (2)– Se o sinal transmitido for:
• Et=E0cos(w0t) (3.3)– o eco do sinal para um alvo é:
• ER=k1E0cos[(w0±wd)t + φ] (3.4) onde:– E0 é a amplitude do sinal transmitido– k1 é uma constante determinada pela equação do radar– w0 é a frequência angular do emissor (rad/s)– wd é o desvio doppler angular (rad/s)– φ é uma constante (desvio de fase) que depende do alcance da
detecção inicial
– Separando o sinal recebido em 2 canais• Canal A EA=k2E0cos(±wdt + φ) (3.5)• Canal B EB=k2E0cos(±wdt + φ + π /2) (3.6)

57
Recuperar sinal de fd (3)
• Se o alvo estiver a aproximar-se as saídas dos dois canais são:
EA(+)=k2E0cos(wdt + φ) e
EB(+)=k2E0cos(wdt + φ + π /2)
• Se o alvo estiver a afastar-se:EA(-)=k2E0cos(wdt - φ)
e EB(-)=k2E0cos(wdt - φ - π /2)
Medição do movimento do alvo através de um motor síncrono bifásico
(3.7a)
(3.7b)

58
Aplicações do radar de onda contínua não modulado
– Medida da velocidade do alvo (p.ex. polícia)– Contador de veículos– sensor ABS– Evitar colisões– monitorizar velocidade de comboios – monitorizar velocidade de atracamento de navios– Sensor de aproximação de comboios– Grande lacuna:
• não consegue medir distância do alvo

59
Radar de onda contínua FM– Se usarmos uma espécie de marca temporal na
portadora conseguimos medir distância, uma vez que essa marca permite reconhecer o tempo de transmissão e o tempo de regresso.
– Quanto mais distinta for a marca, maior precisão terá a medida do tempo decorrido.
– No entanto, quanto mais distinta for a marca, mais largo será o espectro transmitido.
– Uma técnica bastante utilizada é usar modulação FM da portadora. A marca é a mudança de frequência. O tempo decorrido será proporcional à diferença de frequência entre o sinal de eco e o sinal transmitido.

60
Diagrama de blocos Radar FM-CW (alvo fixo)
Diagrama de blocos dum radar de onda contínua FM
sinal emitidosinal eco
(a) modulação linear(b) modulação triangular(c) frequência de batimento de (b)

61
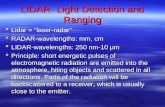
Radar FM-CW (alvo em movimento)
• Alvo a aproximar-se:fb(up)=fr-fd (3.9a)fb(down)=fr+fd (3.9b)
• Assumindo que fr>fd:– Para determinar a distância:
• fr=(1/2)[fb(up)+fb(down)] (3.10a)
– Para determinar o desvio Doppler:
• fd=(1/2)[fb(down)-fb(up)] (3.10b)
– Se fr<fd trocam-se as equações
Relação entre a frequência e o tempo num radar FM-CW quando o sinal recebido é desviado em frequência
devido ao efeito Doppler

62
Mais do que um alvo
– Quando existe mais do que um alvo, a saída do mixervai conter mais do que uma frequência de desvio.
– Se o sistema for linear, conseguimos medir a distância de cada alvo medindo os componentes de frequência de cada um (fr1, fr2, etc.) e aplicando a equação fr=(2R/c) (2fm)
– Para medirmos as frequências individuais, temos que separá-las umas das outras usando:
• um banco de filtros estreitos ou• um filtro sintonizável de banda estreita

63
Diagrama de blocos FM-CW (altímetro)

64
Sinais indesejados no altímetro