Prediction Error Signal - UCSB...Lattice Formulations of LP both covariance and autocorrelation...
15
1 1 Digital Speech Processing— Lecture 14 Linear Predictive Coding (LPC)-Lattice Methods, Applications 2 Prediction Error Signal H(z) Gu(n) s(n) 1 1 1 1 1 1 1 1 1 1. Speech Production Model () ( ) () () () () 2. LPC Model: () () () () ( ) () () () 3. LPC Error Model: () () () α α α = − = = − = = − + = = − = − = − − = = − = = − ∑ ∑ ∑ ∑ % p k k p k k k p k k p k k k k sn asn k Gu n Sz G Hz Uz az en sn sn sn sn k Ez Az z Sz Sz Az Ez 1 1 () () ( ) α − = = = + − ∑ ∑ p k k p k k z sn en sn k A(z) s(n) e(n) 1/A(z) e(n) s(n) Perfect reconstruction even if a k not equal to α k 3 Lattice Formulations of LP both covariance and autocorrelation methods use two step solutions 1. computation of a matrix of correlation values 2. efficient solution of a set of linear equations another class of LP • • methods, called lattice methods, has evolved in which the two steps are combined into a recursive algorithm for determining LP parameters begin with Durbin algorithm--at the stage the set of • th i 12 () coefficients { , , ,..., } are coefficients of the order optimum LP α = i th j j i i 4 1 1 () () ˆ define the system function of the order inverse filter (prediction error filter) as () if the input to this filter is the input segment ˆ ( ) ( ) ( α − = • = − • = + ∑ th i i i k k k n i A z z s m sn mwm 1 1 () () ˆ () () () () ˆ ), with output ( ) ( ) ( ) ( ) ( ) ˆ where we have dropped subscript - the absolute location of the signal the z-transform gives () () () α α = = + = − − • • = = − ∑ i i n i i i k k i i k e m e n m e m sm sm k n E z A zSz 1 () () − = ⎛ ⎞ ⎜ ⎟ ⎜ ⎟ ⎝ ⎠ ∑ i i k k z Sz Lattice Formulations of LP 5 Lattice Formulations of LP 1 1 1 1 () (-) (-) () - () () ( ) ( using the steps of the Durbin recursion ( = , and ) we can obtain a recurrence formula for () of the form () () α α α α − − − • − = = − i i i i i i j j ij i i i i i i i k k A z A z A z kz A 1 1 1 1 1 1 1 ) () ( ) ( ) () ( ) ( ) ( ) giving for the error transform the expression () ()() ( )() ( ) ( ) ( ) − − − − − − − • = − = − − i i i i i i i i i z E z A zSz kz A z Sz e m e m kb m 6 Lattice Formulations of LP 1 where we can interpret the first term as the z-transform of the forward prediction error for an ( ) order predictor, and the second term can be similarly interpreted based on defining a ba • − st i 1 1 1 1 1 1 1 1 1 () () ( ) ( ) ( ) ( ) () () ( ) ckward prediction error () ( )() ( )() ()() () () with inverse transform ( ) ( ) ( ) ( α − − − − − − − − − − = = = − = − • = − − + − = − ∑ i i i i i i i i i i i i i i k k B z z A z Sz z A z Sz kA zSz z B z kE z b m sm i sm k i b m 1 1 ( ) () ) ( ) with the interpretation that we are attempting to predict ( ) from the samples of the input that follow ( ) => we are doing a prediction and ( ) is called the − − • − − i i i ke m sm i i sm i b m backward backward prediction error sequence
Transcript of Prediction Error Signal - UCSB...Lattice Formulations of LP both covariance and autocorrelation...
-
1
1
Digital Speech Processing—Lecture 14
Linear Predictive Coding (LPC)-Lattice
Methods, Applications2
Prediction Error Signal
H(z)Gu(n) s(n)1
1
1
1
1
1
1 1
1
1. Speech Production Model
( ) ( ) ( )
( )( )( )
2. LPC Model:
( ) ( ) ( ) ( ) ( )
( )( )( )
3. LPC Error Model:( )
( ) ( )
α
α
α
=
−
=
=
−
=
= − +
= =−
= − = − −
= = −
= =−
∑
∑
∑
∑
%
p
kk
pk
kk
p
kk
pk
kk
k
s n a s n k Gu n
S z GH zU z a z
e n s n s n s n s n k
E zA z zS z
S zA z E z
1
1( ) ( ) ( )α
−
=
=
= + −
∑
∑
pk
kp
kk
z
s n e n s n k
A(z)s(n) e(n)
1/A(z)e(n) s(n)
Perfect reconstruction even if ak not equal to αk
3
Lattice Formulations of LP both covariance and autocorrelation methods use
two step solutions 1. computation of a matrix of correlation values 2. efficient solution of a set of linear equations another class of LP
•
• methods, called lattice methods, has evolved in which the two steps are combined into a recursive algorithm for determining LP parameters
begin with Durbin algorithm--at the stage the set of • thi
1 2( ) coefficients { , , ,..., } are coefficients of the order
optimum LP
α =i thj j i i
4
1
1( ) ( )
ˆ
define the system function of the order inverse filter (prediction error filter) as
( )
if the input to this filter is the input segment ˆ ( ) ( ) (
α −
=
•
= −
•
= +
∑
th
ii i k
kk
n
i
A z z
s m s n m w m
1
1
( ) ( )ˆ
( ) ( )
( ) ( )
ˆ), with output ( ) ( )
( ) ( ) ( )
ˆ where we have dropped subscript - the absolute location of the signal the z-transform gives
( ) ( ) ( )
α
α
=
= +
= − −
•
•
= = −
∑
i in
ii i
kk
i ik
e m e n m
e m s m s m k
n
E z A z S z1
( ) ( )−=
⎛ ⎞⎜ ⎟⎜ ⎟⎝ ⎠∑
ii k
k
z S z
Lattice Formulations of LP
5
Lattice Formulations of LP
1 1
1 1
( ) ( - ) ( - ) ( )-
( )
( ) ( ) (
using the steps of the Durbin recursion
( = , and )
we can obtain a recurrence formula for ( ) of the form
( ) ( )
α α α α
− − −
•
− =
= −
i i i ii ij j i j i
i
i i i ii
k k
A z
A z A z k z A 1
1 1 1
1 1 1
)
( ) ( ) ( )
( ) ( ) ( )
( ) giving for the error transform the expression
( ) ( ) ( ) ( ) ( )
( ) ( ) ( )
−
− − − −
− −
•
= −
= − −
i i i ii
i i ii
z
E z A z S z k z A z S z
e m e m k b m
6
Lattice Formulations of LP
1
where we can interpret the first term as the z-transform
of the forward prediction error for an ( ) order predictor, and the second term can be similarly interpreted based on defining a ba
•
− sti
1 1 1 1
1 1 1
1
1
( ) ( ) ( ) ( )
( ) ( )
( ) ( ) ( )
ckward prediction error
( ) ( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) with inverse transform
( ) ( ) ( ) (α
− − − − − −
− − −
−
=
= = −
= −
•
= − − + − = −∑
i i i i i ii
i ii
ii i i
kk
B z z A z S z z A z S z k A z S z
z B z k E z
b m s m i s m k i b m 11 ( )
( )
) ( )
with the interpretation that we are attempting to predict ( ) from the samples of the input that follow ( ) => we are doing a
prediction and ( ) is called the
−−
• −−
ii
i
k e m
s m ii s m i
b m
backwardbackward prediction error sequence
-
2
7
Lattice Formulations of LP
same set of samples is used to forward predict s(m)and backward predict s(m-i) 8
Lattice Formulations of LP
1 1 1
1 1
( ) ( )
( ) ( ) ( )
( ) ( ) (
the prediction error transform and sequence ( ), ( ) can now be expressed in terms of forward and backward errors, namely
( ) ( ) ( )
( ) ( )
− − −
− −
•
= −
= −
i i
i i ii
i i ii
E z e m
E z E z k z B z
e m e m k b
1 1 1
1 1
1
1
)
( ) ( ) ( )
( ) ( ) ( )
( ) 1
similarly we can derive an expression for the backward error transform andsequence at sample of the form
( ) ( ) ( )
( ) ( ) ( ) 2
these
− − −
− −
− ∗
•
= −
= − − ∗
•
i i ii
i i ii
m
m
B z z B z k E z
b m b m k e m
1
two equations define the forward and backward prediction error for
an order predictor in terms of the corresponding prediction errors of an
( ) order predictor, with the reminder that a zero−
th
th
i
i
0 0 0 1 3( ) ( )
( )
th order predictor does no prediction, so
( ) ( ) ( )
( ) ( ) ( ) / ( )
= = ≤ ≤ − ∗
= =pe m b m s m m L
E z E z A z S z
9
Lattice Formulations of LP1
(1) (1)
(2) (2)
[ ] [ ][ ], 0
[ ] [ ]0 1
Assume we know (from external computation): 1. we compute and from using Eqs. 1 and 2 2. we next compute and for using Eqs.
k
e m b ms m m L
e m b mm L
≤ ≤ ∗ ∗
≤ ≤ + ∗
( ) ( )
( )
[ ] [ ] 0 1[ ] [ ]
1 and 2 3. extend solution (lattice) to sections giving and for 4. solution is at the output of the lattice section
p p
p
th
pe m b m m L p
e n e np
∗
≤ ≤ + −
=
10
Lattice Formulations of LP
• lattice network with p sections—the output of which is the forward prediction error
• digital network implementation of the prediction error filter with transfer function A(z)
• no direct correlations
• no alphas
• k’s computed from forward and backward error signals
11
Lattice Filter for A(z)
0 0 0 1( ) ( )[ ] [ ] [ ]= = ≤ ≤ −e n b n s n n L1 1 1 1 2 0 1( ) ( ) ( )[ ] [ ] [ ] , ,..., ,− −= − − = ≤ ≤ − +i i iie n e n k b n i p n L i
1 1 1 1 2 0 1( ) ( ) ( )[ ] [ ] [ ] , ,..., ,− −= − + − = ≤ ≤ − +i i iib n k e n b n i p n L i
0 1( )[ ] [ ],= ≤ ≤ − +pe n e n n L p( ) ( ) ( )=E z A z S z 12
All-Pole Lattice Filter for H(z)
0 1= ≤ ≤ − +( )[ ] [ ],pe n e n n L p1 1 1
1 1 0 1 1
( ) ( ) ( )[ ] [ ] [ ], ,..., ,
− −= + −
= − ≤ ≤ − + −
i i iie n e n k b n
i p p n L i1 1 1
1 1 0 1
( ) ( ) ( )[ ] [ ] [ ], ,..., ,
− −= − + −
= − ≤ ≤ − +
i i iib n k e n b ni p p n L i
0 0 0 1( ) ( )[ ] [ ] [ ],= = ≤ ≤ −s n e n b n n L1( ) ( )( )
=S z E zA z
1z − 1z −( ) [ ]pb n
( ) [ ]pe n ( 1) [ ]pe n− (1) [ ]e n ( 0 ) [ ]e n [ ]s n
( 1) [ ]pb n− (1) [ ]b n ( 0 ) [ ]b n
pk
pk−
1pk −
1pk −−
1k
1k−
-
3
13
All-Pole Lattice Filter for H(z)
This image cannot currently be displayed.
( ) ( 1)
( 1) ( )
(0) (0) ( )
[ 1] 0, , [0], 1,...,1, [0] [0]
[0] [0] [0]1,2,...,
1. since we can first solve for for using the relationship:
2. since we can then solve for for using the equ
−
−
− = ∀
= − =
=
=
i i
i i
i
b i ei p p e e
b e bi p ( ) ( 1)
( 1)
( 1) ( ) ( 1)
(0) (0) ( )
[0] [0]
[1][1] [1] [0], , 1,...,1
[1] [1] [1]1,2,...,
ation: 3. we can now begin to solve for as:
4. we set and we can then solve for for using
−
−
− −
= −
= + = −
==
i ii
i
i i ii
i
b k e
ee e k b i p p
b e bi p
( ) ( 1) ( 1)
(0) (0)
[1] [1] [0], 1, 2,...,2,3,..., 1
[ ] [ ] [ ]
the equation:
5. we iterate for and end up with
− −= − + == −
= =
i i iib k e b i p
n Ns n e n b n
14
Lattice Formulations of LP
the lattice structure comes directly out of the Durbin algorithm the parameters are obtained from the Durbin equations the predictor coefficients, , do not appear explicitly in the lattice stα
••
•i
k
k
11 1
01 2
1 11 2 1 2
0 0
14
1
( ) ( )
/
( ) ( )
ructure can relate the parameters to the forward and backward errors via
( ) ( )
[ ( )] [ ( )]
wh
− +− −
=
− + − +− −
= =
•
−
= ∗⎧ ⎫⎡ ⎤ ⎡ ⎤⎪ ⎪−⎢ ⎥ ⎢ ⎥⎨ ⎬⎢ ⎥ ⎢ ⎥⎪ ⎪⎣ ⎦ ⎣ ⎦⎩ ⎭
•
∑
∑ ∑
i
L ii i
mi
L i L ii i
m m
k
e m b mk
e m b m
ere is a normalized cross correlation between the forward and backward prediction error, and is therefore called a partial correlation or PARCOR coefficient can compute predictor coefficients re•
ik
cursively from the PARCOR coefficients
15
Direct Computation of k Parameters0 1
( ) ( )
assume [ ] non-zero for assume chosen to minimize total energy of the forward
(or backward) prediction errorswe can then minimize prediction error as :
(
≤ ≤ −
=
i
i iforward
s n n Lk
E e m
forward21 12 1 1
0 0
11 1 1
0
11 1
01 21
0
1
0 2 1 1
1
1
( ) ( )
( )( ) ( ) ( )
( ) ( )
( )
) ( ) ( )
( ) ( ) ( )
( ) ( )
( )
− + − +− −
= =
− +− − −
=
− +− −
=− +
−
=
⎡ ⎤ ⎡ ⎤= − −⎣ ⎦ ⎣ ⎦
∂ ⎡ ⎤= = − − − −⎣ ⎦∂
⎡ ⎤⋅ −⎣ ⎦=
⎡ ⎤−⎣ ⎦
∑ ∑
∑
∑
∑
L i L ii i
im m
i L ii i iforward
imi
L ii i
forward mi L i
i
m
e m k b m
E e m k b m b mk
e m b mk
b m16
Direct Computation of k Parameters
21 12 1 1
0 0
11 1
0
1
0 2 1
( ) ( ) ( ) ( )
( )( ) ( )
we can also choose to minimize the prediction error
( ) ( ) ( )
( ) ( )
− + − +− −
= =
− +− −
=
•
⎡ ⎤ ⎡ ⎤= = − + −⎣ ⎦ ⎣ ⎦
∂ ⎡ ⎤= = − − + −⎣ ⎦∂
∑ ∑L i L i
i i i ibackward i
m m
i L ii ibackward
imi
E b m k e m b m
E k e m b mk
backward
1
11 1
01 21
0
1
( )
( ) ( )
( )
( )
( ) ( )
( )
−
− +− −
=− +
−
=
⎡ ⎤−⎣ ⎦=
⎡ ⎤⎣ ⎦
∑
∑
∑
i
L ii i
backward mi L i
i
m
e m
e m b mk
e m
17
Direct Computation of k Parameters
2 21 11 1
0 0
11 1
0
1
1
1
( ) ( )
( ) ( )
(
if we window and sum over all time, then
( ) ( )
therefore
( ) ( )
− + − +− −
= =
− +− −
=
−
•
⎡ ⎤ ⎡ ⎤= −⎣ ⎦ ⎣ ⎦
= = =
−=
∑ ∑
∑
L i L ii i
m m
PARCOR forward backward forward backwardi i i i i
L ii i
m
i
e m b m
k k k k k
e m b m
e1 21 12 21
0 01
/) ( )( ) ( )
− + − +−
= =
⎧ ⎫⎡ ⎤ ⎡ ⎤−⎨ ⎬⎣ ⎦ ⎣ ⎦⎩ ⎭∑ ∑
L i L ii
m mm b m
18
Direct Computation of k Parameters
{ }1 2 20
211 1 1 1
0
1
( ) ( ) ( )
( ) ( ) ( ) (
minimize of forward and backward prediction errors over fixed interval (covariance method)
( ) ( )
( ) ( ) ( )
−
=
−− − − −
=
•
⎡ ⎤ ⎡ ⎤= +⎣ ⎦ ⎣ ⎦
⎡ ⎤= − − + − +⎣ ⎦
∑
∑
Li i i
Burgm
Li i i i
i im
E e m b m
e m k b m k e m b
sum
2
11 1 1
0
11 1 1
0
11 1
0
2 21 1
0
1
0 2 1 1
2 1
2 1
1
)
( )( ) ( ) ( )
( ) ( ) ( )
( ) ( )
( ) ( )
( )
( ) ( ) ( )
( ) ( ) ( )
( ) ( )
( ) ( )
∞
=−∞
−− − −
=
−− − −
=
−− −
=
− −
=
⎡ ⎤−⎣ ⎦
∂⎡ ⎤= = − − − −⎣ ⎦∂
⎡ ⎤− − + −⎣ ⎦
⎡ ⎤⋅ −⎣ ⎦=
⎡ ⎤ ⎡ ⎤+ −⎣ ⎦ ⎣ ⎦
∑
∑
∑
∑
m
i LBurg i i i
imi
Li i i
im
Li i
Burg mi L
i i
m
m
Ee m k b m b m
k
k e m b m e m
e m b mk
e m b m1 1
0
1 1
− −
=
• − ≤ ≤
∑ ∑L
m
Burgik always
-
4
19
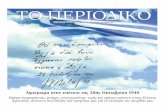
Comparison of Autocorrelation and Burg Spectra
• significantly less smearing of formant
peaks using Burg method
20
Summary of Lattice Procedure
0 0
1
( ) ( )
steps involved in determining the predictor coefficients and the parameters for the lattice method are as follows
1. initial condition, ( ) ( ) ( ) from Eq. *3
2. compute
•
= =
k
e m s m b m
k 111 1
2
( )
( ) ( )
( )
( )
from Eq. *4
3. determine forward and backward prediciton errors ( ), ( ) from Eqs. *1 and *2 4. set
5. determine from Eq. *4
6. determine for
α
α
α
=
=
= ii ii
j
e m b mi
k
j 1 2 1
1
( ) ( )
, ,..., from Durbin iteration
7. determine ( ) and ( ) from Eqs. *1 and *2 8. set 9. if is less than or equal to , go to step 5 10. procedure is terminated
= −
= +
•
i i
i
e m b mi i
i p
predictor coefficients obtained directly from speech samples => without calculation of autocorrelation function method is guaranteed to yield stable filters (
-
5
LPC Comparisons
25 26
Comparisons Between LP Methods
• the various LP solution techniques can be compared in a number of ways, including the following:– computational issues– numerical issues– stability of solution– number of poles (order of predictor)– window/section length for analysis
27
LP Solution Computations
• assume L1≈ L2>>p; choose values of L1=300, L2=300, L3=300, p=10
• computation for
• covariance method ≈ L1p+p3 ≈ 4000 *,+
• autocorrelation method ≈ L2p+p2 ≈ 3100 *,+
• lattice method ≈ 5L3p ≈ 15000 *,+ 28
LP Solution Comparisons• stability
– guaranteed for autocorrelation method– cannot be guaranteed for covariance method; as
window size gets larger, this almost always makes the system stable
– guaranteed for lattice method• choice of LP analysis parameters
– need 2 poles for each vocal tract resonance below Fs/2
– need 3-4 poles to represent source shape and radiation load
– use values of p ≈ 13-14
29
The Prediction Error Signal
30
LP Speech AnalysisTop panel: speech signal
Second panel: error signal
Third panel: log magnitude spectra of signal and LP model
Fourth panel: log magnitude spectrum of error signal
file:s5, ss:11000, frame size (L):320, lpc order (p):14, cov method
-
6
31
LP Speech AnalysisTop panel: speech signal
Second panel: error signal
Third panel: log magnitude spectra of signal and LP model
Fourth panel: log magnitude spectrum of error signal
file:s5, ss:11000, frame size (L):320, lpc order (p):14, ac method
32
LP Speech AnalysisTop panel: speech signal
Second panel: error signal
Third panel: log magnitude spectra of signal and LP model
Fourth panel: log magnitude spectrum of error signal
file:s3, ss:14000, frame size (L):160, lpc order (p):16, cov method
33
LP Speech AnalysisTop panel: speech signal
Second panel: error signal
Third panel: log magnitude spectra of signal and LP model
Fourth panel: log magnitude spectrum of error signal
file:s3, ss:14000, frame size (L):160, lpc order (p):16, ac method
34
Variation of Prediction Error with LP Order
• prediction error flattens at around p=13-14
• normalized prediction error for unvoiced speech larger than for voiced speech => model isn’t quite as accurate
35
LP Solution Comparisons
• choice of LP analysis parameters– use small values of L for reduced computation– use l order of several pitch periods for reliable
prediction-especially when using tapered window– use l from 100-400 samples at 10 kHz for
autocorrelation– for lattice and covariance methods, L as small as 2 p
has been used (within pitch periods); however if pitch pulse occurs within window, bad prediction results => use much larger values of L
36
Prediction Error Signal Behavior
1
- the prediction error signal is computed as
( ) ( ) ( ) ( )
- ( ) should be large at the beginning of each pitch period (voiced speech) => good signal for pitch detection- can
α=
= − − =∑p
kk
e n s n s n k Gu n
e n
perform autocorrelation on ( ) and detect largest peak- error spectrum is approximately flat-so effects of formants on pitch detection are minimized
e n
-
7
37
Normalized Mean-Squared Error
12
01
2
0
12
01
2
0
ˆ
ˆ
ˆ
ˆ
ˆ
ˆ
- for autocorrelation method
( )
( )
- for covariance method
( )
( )
+ −
=−
=
−
=−
=
=
=
∑
∑
∑
∑
L p
nm
n L
nm
L
nm
n L
nm
e mV
s m
e mV
s m
0
0 0
0
2
1
0 0
00 0
1
0
ˆ ˆ
ˆˆ
ˆ
ˆˆ
ˆ
ˆ
- the prediction error sequence (defining ) is
( ) ( )
- giving many forms for the normalized error
( , )
( , )
( , )( , )
( )
α
α
φα α
φ
φα
φ
=
= =
=
= −
= − −
=
= −
= −
∑
∑∑
∑
p
kn nk
p pn
i jnni j
pn
inni
ini
e m s m k
i jV
iV
V k1=∏
p
38
Experimental Evaluations of LPC Parameters
39
Normalized Mean-Squared Error
• Vn versus p for synthetic vowel, pitch period of 83 samples, L=60, pitch synchronous analysis
• covariance method-error goes to zero at p=11, the order of the synthesis filter
• autocorrelation method, Vn≈0.1 for p≥7 since error dominated by prediction at beginning of interval 40
Normalized Mean-Squared Error
• normalized error versus p for pitch asynchronous analysis, L=120, normalized error falls to 0.1 near p=11 for both covariance and autocorrelation methods
41
Normalized Mean-Squared Error
• normalized error versus L, p=12
• for L < pitch period (83 samples), covariance method gives smaller normalized error than autocorrelation method
• for values of L at or near multiples of pitch period, normalized error jumps due to large prediction error in vicinity of pitch pulse
• when L > 2 * pitch period, normalized error same for both autocorrelation and covariance methods
42
Normalized Mean-Squared Error
• results for natural speech
-
8
43
Normalized Mean-Squared Error• variability of normalized error with positioning of frame
• sample-by-sample LP analysis of 40 msec of vowel /i/
• signal energy in part a; normalized error in part b for p=14 pole analysis using 20 msec frame size for covariance method; normalized error in part c for autocorrelation method using HW; normalized error in part d for autocorrelation method using RW
• average pitch period of 84 samples => 2.5 pitch periods in 20 msec window
• substantial variations in normalized error for covariance method-especially peaked when pitch pulses enter window => longer windows give larger normalized errors
• substantial high frequency variations in normalized error for autocorrelation method with some pitch modulations
Properties of the LPC Polynomial
44
45
Minimum-Phase Property of A(z)( ) has all its zeros inside the unit circleA z
2 1: Assume that ( ) is a zero (root) of P ( )roof >o oz z A z11( ) ( ) ( )− ′= − oA z z z A z
2 2 2
12
12
2 2 21 0
ˆ ˆ ˆ
ˆ
The minimum mean-squared error is
[ ] | ( ) | | ( ) |
( ) ( )
πω ω
π
π
ωπ
π ω ω ω ωπ
∞
=−∞ −
= =
− ′= − >∫−
∑ ∫ j jn n nm
o n
E e m A e S e d
j j jz e A e S e d
2 221 1 1( / )ω ω− ∗ −=− −j jo o oz e z z e
1Thus, ( ) could not be the optimum filter becausewe could replace by ( / ) and decrease the error.∗o o
A zz z 46
PARCORs and Stability1 1( )prove that for some • ≥ ⇒ ≥ii jk z j
1 1 1 1
1
1( ) ( ) ( ) ( )( ) ( ) ( ) ( )− − − − −=
= − = −∏i
i i i i ii j
jA z A z k z A z z z
1
1
( ) ( )
( )
It is easily shown that is the coefficient
of in ( ), i.e., . Therefore,
If , then either all the roots must be theunit circle or at least one of
α−
=
−
=
=
≥
∏on
ii i i
i ip
ii j
j
i
k
z A z k
k z
kthem must be
the unit circle.outside
47
PARCORs and Stability1
1 2
( )
if , then either all the roots must be the unit circle or at least one of them must be the unit circle. Since this is true for all ( ),
, ,..., , a necessary condition for th
• ≥
=
on
outsidei
i
k
A zi p
2 1 2 0
1
1 1 2
1 1 0
1
( )
( ) ( ) ( )
e roots of( ) to be inside the unit circle is:
, , ,...,
for the -order optimum linear predictor,
( ) ( )
so and t
−
=
< =
•
= − = − >
<
∏
p
i
th
ii i
i jj
i
A zk i p
i
E k E k E
k ( )herefore ( ) has all its roots inside the unit circle.
pA z
48
Root Locations for Optimum LP Model
1
1
1 1
( )( ) 1
(1 ) ( )
pi
ii
p
p p
i ii i
G GH zA z z
G Gz
z z z z
α −=
−
= =
= =−
= =− −
∑
∏ ∏
%
-
9
49
Pole-Zero Plot for ModelWhich polescorrespond toformantfrequencies?
50
Pole Locations
51
Pole Locations (FS=10,000 Hz)
( /180) ( / 2)SF Fθ= ⋅52
Estimating Formant Frequencies
• compute A(z) and factor it.• find roots that are close to the unit circle.• compute equivalent analog frequencies
from the angles of the roots.• plot formant frequencies as a function of
time.
53
Spectrogram with LPC Roots
54
Spectrogram with LPC Roots
-
10
55
Comparison to ABS Methods2
2
2
error measure for ABS methods is log ratio of power spectra, i.e.,
| ( ) | log
| ( ) |
thus for ABS minimization of is equivalent to minimizing mean squ
π ω
ωπ
ω−
•
⎧ ⎫⎡ ⎤⎪ ⎪′ = ⎢ ⎥⎨ ⎬⎢ ⎥⎪ ⎪⎣ ⎦⎩ ⎭
′•
∫j
nj
S eE d
H e
E ared error between two log spectra comparing and we see the following:
both error measures related to ratio of signal to model spectra both tend to perform uniformly over who
•
o
o
LPC ABSE E
le frequency range both are suitable to selective error minimization over specified frequency ranges error criterion for LP modeling places higher weight on frequency regions
where | (
o
o
nS2 2) | | ( ) | , whereas the ABS error criterion places equal weight on
both regions for unsmoothed signal spectra (as obtained by STFT methods), LP error criterion
yields better spectral m
ω ω<
⇒
j je H e
atches than ABS error criterion for smoothed signal spectra (as obtained at output of filter banks), both error criteria
will perform well⇒
56
Relation of LP Analysis to Lossless Tube Models
57
Discrete-Time Model - I
• Make all sections the same length with delay
/ whereτ = Δ = Δlx c N x58
Discrete-Time Model - II
2
-section lossless tube model corresponds to discrete-time system when:
where is the velocity of sound, is the number oftube sections, is the sampling frequency, and isthe total
S
S
N
cNF
c NF
=l
l
1
1
{ , 1 1}length of the vocal tract.
The reflection coefficients are relatedto the areas of the lossless tubes by:
Can find transfer function of digital system subject tocon
k
k kk
k k
r k N
A ArA A
+
+
≤ ≤ −
−=
+
1,//
straints of the form GN L
N LN L
rc A Zr rc A Z
ρρ
=
−= =
+
59
Discrete-Time Model - III
60
Discrete-Time Model - IV2
1
0 5 1 1 /. ( ) ( )( )( )( ) ( )
−
=
+ += =
∏N
NG k
L k
G
r r zU zV zU z D z
01
1 1
11 2
( ) ( ) ( ) ( ) , , ,( ) ( )
− −− −
== + ==
Kkk k k k
N
D zD z D z r z D z k ND z D z
1
1
1 1 reflection coefficient++
⎛ ⎞−− ≤ = ≤⎜ ⎟+⎝ ⎠
k kk
k k
A ArA A
1 / if (i.e., ) and /
then ( ) satisties the recursion
ρρ
−= = ∞ = =
+N L
G G N LN L
c A Zr R r rc A Z
D z
Given the system function:
-
11
61
All-Pole Lattice Filter for H(z)
1−z 1−z 1−z
1k1k−
1−pk1−− pk
pk
pk−
][ne ][ns
1( ) ( )( )
=S z E zA z
0
1 1 1
11 2
( )
( ) ( ) ( )
( )
( ) ( ) ( ) ( ) , , ,
( ) ( )
− − − −
== − ==
Ki i i iip
A zA z A z k z A z i pA z A z
If and , then ( ) ( ).= − = =i ir k N p D z A z62
Tube Areas from PARCORS• Relation to areas:
• Solve for Ai+1 in terms of Ai
• Log area ratios (good for quantization)
1 1
1 1
11 11
( / )( / )
+ +
+ +
⎛ ⎞ ⎛ ⎞− −− ≤ − = = = ≤⎜ ⎟ ⎜ ⎟+ +⎝ ⎠ ⎝ ⎠
i i i ii i
i i i i
A A A Ak rA A A A
11 01+⎛ ⎞−
= >⎜ ⎟+⎝ ⎠i
i ii
kA Ak
1 1 01
+ ⎛ ⎞−= >⎜ ⎟+⎝ ⎠i i
i i
A kA k
1 11
log log+⎛ ⎞ ⎛ ⎞−
= =⎜ ⎟ ⎜ ⎟+⎝ ⎠ ⎝ ⎠i i
ii i
A kgA k
Minimizes spectralsensitivity under uniform quantization
63
Estimating Tube Areas from Speech (Wakita)
H. Wakita, IEEE Trans. Audio and Electroacoustics,October, 1973.
11 2
21
3
. Sample speech [ [ ] ( )] at samplingrate / / ( ).. Remove effects of glottal source and radiation by
pre-emphasis [ ] [ ] [ ].. Compute the PARCOR coefficients on a short-
time ba
a
s
s n s nTF T pc
x n s n s n
=
= =
= − −
l
1
1 24 1
sis: , , ,..., .. Assuming (arbitrary), compute
ik i pA=
=
11 1 2 11
, , ,...,+⎛ ⎞−
= = −⎜ ⎟+⎝ ⎠i
i ii
kA A i pk
64
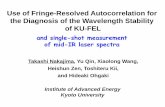
Estimation of Tube Areas
Analysis of syllable /IY/ /B/ /AA/• /IY/ sound in part (a)• /B/ sound in parts (b) and (c)• /AA/ sound in part (d)
Using Wakita method to estimate tube areas from the speech waveform as shown in lower plot.
65
Estimations of Tube Areas
Use of Wakita method to estimate tube areas for the five vowels, /IY/, /EH/, /AA/, /AO/, /UW/
66
Alternative Representations of the LP Parameters
-
12
67
LP Parameter Sets
68
PARCORs to Prediction Coefficients
1 1
1 2
1 1 2 1
1 2
( )
( ) ( ) ( )
( )
for , , ,
if , then for , , ,
endend
, , ,
α
α α α
α α
− −−
=
=
> = −
= −
= =
K
K
K
ii i
i i ij j i i j
pj j
i pk
i j ik
j p
1 2assume that , , , , are given. Then we can skip the computation of in the Levinson recursion.• = Ki
i
k i pk
69
Prediction Coefficients to PARCORs
12
11 1
1 2
1 21 2 1
1
( )
( )
( ) ( )( )
( )
for , , ,
for , , ,for , , ,
end
end
α α
α
α αα
α
−−
−− −
= =
=
= −= −
+=
−
=
K
K
K
pj j
pp p
i ij i i ji
ji
ii i
j p
k
i p pj i
kk
k
1 2assume that , , , , are given. Then we
can work backwards through the Levinson Recursion.
α• = Kj j p
70
LP Parameter Transformations
( )11 1
1 1
roots of the predictor polynomial
( )
where each root can be expressed as a z-plane or s-plane root, i.e., ;
α
σ
− −
= =
•
= − = −
•
= + = + Ω
=
∑ ∏pp
kk k
k k
k kr ki k k k
k
A z z z z
z z j z s j
z
( )1 2 21 12
giving
tan ; log
important for formant estimation
σ−⎡ ⎤
Ω = = +⎢ ⎥⎣ ⎦
•
ks T
kik k kr ki
kr
e
zz z
T z T
71
LP Parameter Transformations
1
1
1
1
1
1
cepstrum of IR of overall LP system from predictor coefficients
ˆ ˆ ( ) ( )
predictor coefficients from cepstrum of IR
ˆ ˆ ( ) ( )
α α
α α
−
−=
−
−=
•
⎛ ⎞= + ≤⎜ ⎟⎝ ⎠
•
⎛ ⎞= − ≤⎜ ⎟⎝ ⎠
∑
∑
n
n n kk
n
n n kk
kh n h k nn
kh n h k nn
0
1
1
where
( ) ( )α
∞−
= −
=
= =
−∑
∑n
pn k
kk
GH z h n z
z
72
LP Parameter Transformations
1
0
1
2
1
0
1
0
IR of all pole system
( ) ( ) ( )
autocorrelation of IR
( ) ( ) ( ) ( )
( ) (| |)
( ) ( )
α δ
α
α
=
∞
=
=
=
•
= − + ≤
•
= − = −
= − ≤
= +
∑
∑
∑
∑
% %
% %
% %
p
kk
np
kk
p
kk
h n h n k G n n
R i h n h n i R i
R i R i k i
R R k G
-
13
73
LP Parameter Transformations
1
1
1
0
autocorrelation of the predictor polynomial
( )
with IR of the inverse filter
( ) ( ) ( )
with autocorrelation
( ) ( ) ( )
α
δ α δ
−
=
=
•
= −
= − −
= + ≤ ≤
∑
∑
pk
kk
p
kk
ak
A z z
a n n n k
R i a k a k i i p0
−
=∑p i
74
LP Parameter Transformations
1 1 11
1 11
log area ratio coefficients from PARCOR coefficients
log log
with inverse relation
+
•
⎡ ⎤ ⎡ ⎤−= = ≤ ≤⎢ ⎥ ⎢ ⎥+⎣ ⎦ ⎣ ⎦
−= ≤ ≤
+
i
i
i ii
i i
g
i g
A kg i p
A k
ek i pe
75
Quantization of LP Parameters
2
2
1
consider the magnitude-squared of the model frequency response
( ) ( , )| ( ) |
where is a parameter that affects . spectral sensitivity can be defined as
jjH e P gA e
g P
Sg
ωω ω
•
= =
•
∂∂ 0
1 12
( , )lim log( , )
which measures sensitivity to errors in the parameters
i
ig
i i i i
i
P g dg P g g
g
π
π
ω ωπ ω→Δ −
⎡ ⎤= ⎢ ⎥Δ + Δ⎣ ⎦
∫
76
Quantization of LP Parameters
• spectral sensitivity for kiparameters; low sensitivity around 0; high sensitivity
around 1
• spectral sensitivity for log area ratio
parameters, gi – low sensitivity for virtually entire range is seen
77
Line Spectral Pair Parameters1 2
1 2
1 1 1 1 12 1
1
1
( ) ( )
( ) ...
all-zero prediction filter with all zeros, , inside the unit circle
( ) ( ) ...
reciprocal polynomial with inverse zeros, / c
α α α
α α α
− − −
− + − − − + − − +
= + + + +
=
= = + + + +
=
%
pp
k
p p p pp
k
A z z z z
z
A z z A z z z z z
z
1 1
1
1( )
onsider the following:
( ) ( ) allpass system ( ) , all ( )
form the symmetric polynomial ( ) as:
( ) ( ) ( ) ( ) ( ) ( ) has zeros for ( ) ; ( ( )
ω ω
− + −
= = ⇒ =
= + = + ⇒ = − = −
%
% %
j
p
A zL z L eA z
P z
P z A z A z A z z A z P z L z A z
{ }
{ }1 1
1 2 2 0 1 1
1
2 0 1
( )
( ))
arg ( ) ( / ) , , ,...,
form the anti-symmetric polynomial ( ) as:
( ) ( ) ( ) ( ) ( ) ( ) has zeros for ( ) ; ( ( ) ( ))
arg ( ) , , ,...,
ω
ω
π
π
− + −
⇒ = + ⋅ = −
= − = − ⇒ = + =
⇒ = ⋅ = −
% %
k
k
j
p
j
A z
L e k k p
Q z
Q z A z A z A z z A z Q z L z A z A z
L e k k p 1
78
Line Spectral Pair Parameters
{ } zeros of ( ) and ( ) fall on unit circle and are interleaved with
each other set of called Line Spectral Frequencies (LSF) LSFs are in ascending order stability of ( ) guaranteed by quan
ω⇒ k
P z Q z
H z
2 22
2
4
tizing LSF parameters( ) ( ) ( )
( ) ( )( )
ω ωω
ω ωω
+=
+=
j jj
j jj
P e Q eA e
P e Q eA e
-
14
79
Line Spectrum Pair (LSP) Parameters
1 1 properties of LSP parameters
1. ( ) corresponds to a lossless tube, open at the lips and open ( )
at the glottis 2. ( ) corresponds to a lossless tube, open at the lips and clos
+
•=pP z k
Q z 1 1
11
ed ( )
at the glottis 3. all the roots of ( ) and ( ) are on the unit circle 4. if is an even integer, then ( ) has a root at and ( ) has a root at 5. a
+ = −
= += −
pk
P z Q zp P z z Q zz
1 1 2necessary and sufficient condition for , , ,..., is that the roots of ( ) and ( )alternate on the unit circle 6. the LSP frequencies get close together when roots of ( ) are close
< =ik i pP z Q z
A z to the unit circle 7. the roots of ( ) are approximately equal to the formant frequenciesP z
80
LSP Example
( ) rootso ( ) rootsx ( ) roots
P zQ zA z
∗
12p =
81
Line Spectrum Pair (LSP) Parameters
82
LPC Synthesis
1
the basic synthesis equation is
( ) ( ) ( )
need to update parameters every 10 msec or so pitch synchronous mode works best
α=
•
= − +
••
∑% %p
kk
s n s n k Gu n
83
LPC Analysis-Synthesis
1. Extract αk parameters properly
2. Quantize αk parameters properly so that there is little quantization error
• Small number of bits go into coding the αk coefficients
3. Represent e(n) via:
• Pitch pulses and noise—LPC Coding
• Multiple pulses per 10 msec interval—MPLPC Coding
• Codebook vectors—CELP
• Almost all of the coding bits go into coding of e(n)
84
LPC Vocoder
• bit rates of 72 FSwhere FS=100, 67, and 33 for bit rates of 7200 bps, 4800 bps and 2400 bps
3600 bps
2400 bps
VEV LPC
header
-
15
85
LPC Basics
A(z) H(z)sn(m) en(m) sn(m)
[ ]
1
1
1
2
1 1
1 1 111
ˆ ˆ ˆ
ˆ ˆ ˆ
( ) ( ) ( ) ; prediction error filter( )
( ) ( ) ( ); prediction error
( ) ; all pole model( ) ( )
( ) ( )
α
α
α
−
=
=
−
=
∞
=−∞
= − = − =
= − −
= = =−−
= = −
∑
∑
∑
∑
pk
kk
p
kn n nk
pk
kk
n n nm
E zA z z P zS z
e m s m s m k
H zA z P zz
E e m s m2
1ˆ ( )α
∞
=−∞ =
⎛ ⎞−⎜ ⎟
⎝ ⎠∑ ∑
p
k nm k
s m k86
LPC Basics-Speech Model
P(z)
+e(n)=Gu(n) s(n)
1
1
11
1
( ) ( )( ) ( )
( )ωω
α
α
−
=
−
=
= = =−−
=−
∑
∑
pk
kk
jp
j kk
k
G G S zH zP z U zz
GH ee
87
Summary• the LP model has many interesting and useful properties
that follow from the structure of the Levinson-Durbin algorithms
• the different equivalent representations have different properties under quantization– polynomial coefficients (bad)– polynomial roots (okay)– PARCOR coefficients (okay)– lossless tube areas (good)– LSP root angles (good)
• almost all LPC representations can be used with a range of compression schemes and are all good candidates for the technique of Vector Quantization





![FurtherStudiesonAntioxidantPotentialandProtectionof ...downloads.hindawi.com/journals/jdr/2007/015803.pdf · formulations [13, 14]. Ayurveda also describes vidanga as pungent and](https://static.fdocument.org/doc/165x107/5e983cb5ea21fc1c66732cb3/furtherstudiesonantioxidantpotentialandprotectionof-formulations-13-14-ayurveda.jpg)