Pitfalls of FE Computing - Ústav termomechaniky AV ČR · · 2010-06-28ε engineering 1...
38
Pitfalls of FE Computing M. Okrouhlik Institute of Thermomechanics Prague, Czech Republic
Transcript of Pitfalls of FE Computing - Ústav termomechaniky AV ČR · · 2010-06-28ε engineering 1...

Pitfalls of FE Computing
M. OkrouhlikInstitute of Thermomechanics
Prague, Czech Republic

Governing equations• Cauchy equations of motion
• Kinematic relations (strain – displacement relations)
• Constitutive relations
itt
it
jt
jitt xfx
&&ρσ
=+∂∂
⎟⎟⎠
⎞⎜⎜⎝
⎛
∂∂
∂∂
+∂∂
+∂∂
=j
kt
i
kt
i
jt
j
it
ij xu
xu
xu
xu
000021angeGreen_Lagrε⎟
⎟⎠
⎞⎜⎜⎝
⎛
∂∂
+∂∂
=i
jt
j
it
ij xu
xu
0021gengineerinε
gengineeringengineerinklijklij C εσ =
Lagrange_Greenklijklij DS ε&& =

Methods of solution • Linearization – small rotations, small
strains, linear constitutive relations • Discretization
• Finite difference method • Transfer matrix method • Matrix method
• Displacement formulation • Force formulation
• Finite element method • Displacement formulation • Force formulation • Hybrid finite element method • Mixed finite element method
• Boundary element method Development of finite element method formulations and technology • Method of weighted residuals • Galerkin – weighted f. = basis f. • Ritz

Numerical methods in FEA • Equilibrium problems
QqqK =)( solution of algebraic equations
• Steady-state vibration problems ( ) 0qMK =− 2Ω
generalized eigenvalue problem
• Propagation problems
VV
d, Tintextint ∫=−= σBFFFqM &&
step by step integration in time In linear cases we have
)(tPKqqCqM =++ &&&

Now a few examples
from• Statics• Steady-state vibration• Transient dynamicsusing• Rod elements• Beam elements• Bilinear (L) and biquadratic (Q) plane elements

Static loading of a cantilever beam by a vertical force acting at the free end.
Beam 4-dof elements (Euler-Bernoulli) are used.
1
2
3
4

⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
−−−
=
2
22
3
2sym.36
323636
2
ll
lllll
lEIk
PKq =
EIPLv3
3
tip =
1 1.90476190476190 5e-003 1.90476190476190 4e-003
10 1.90476190476 043e-003 1.90476190476 1904e-003
1 2 3 kmax
P
‘Exact’ formula for thin beams

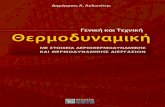
A thin cantilever beam, vertical point load at the free end, four-node plane stress elements
FE technology
∫=V
VdTEBBk
full integration 1 … anal, 2 … Gauss q., different types of underintegration
0 1 2 3 4 5 6 7 8 9 100
1
2
3
4
5
6x 10
-3
"EXACT"
KHGS 0 1 2 3 4 5 6
LDefault in ANSYSReduced integration in Marc
Exact integration Exact integrationdoes not yield‘exact’ results
Data obtained with10 elements

Comparison of beam and L elements used for modelling of a static loading
of a cantilever beam
• Beam … even one element gives a negligible error
• L … too stiff in bending, tricks have to be employed to get correct results

1 2 3
4 5 6
7 8
0 5 100
1
2
3x 10
4GEIVP
cons is tent
1 2 3
4 5 6
7 8
0 5 100
5000
10000
15000GEIVP
diagonal
A single four-node plane stress elementGeneralized eigenvalueproblem
Full integration
0qMK =− )( λ

1 2 3 kmax
0qMK =− )( λ
Free transverse vibration of a thin elastic cantilever beamFE vs. continuum approach (Bernoulli_Euler theory)
Generalized eigenvalue problem
Two cases will be studied- L (bilinear, 4-node, plane stress elements)- Beam elements

0 1 2 3 4 5 6 7 8 9 100
2000
4000
6000
8000
10000
1, 100.506 2, 586.4532 3, 1299.7804 4, 1501.8821
5, 2651.6171 6, 3862.638 7, 3931.881 8, 5258.5331
9, 6313.8768 10, 6567.2502 11, 7802.0473 12, 8571.0469
13, 8907.7934 14, 9804.6267 15, 10394.9981 16, 10520.9827
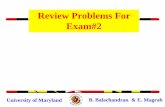
Natural frequencies and modes of a cantilever beam … diagonal mass m.Four-node plane stress elements, full integration
Sixth FE frequency is the second axialSeventh FE frequency is the fifth bending
Higher frequencies are uselessdue to discretization errors
Analytical axial Analytical bending
FE frequencies
This we cannot say without looking at eigenmodes
Frequencies in [Hz] versus counter
L

0 1 2 3 4 5 6 7 8 9 100
2000
4000
6000
8000
10000axial, bending and FE frequencies [Hz]
cons is tent
1, 101.2675 2, 615.4501 3, 1302.6992 4, 1663.1767
5, 3135.596 6, 3941.6886 7, 4996.7233 8, 6682.2631
9, 7215.1641 10, 9593.4882 11, 9739.1512 12, 12430.9913
13, 12740.3253 14, 14990.9545 15, 16164.1614 16, 16950.4893
Natural frequencies and modes of a cantilever beam … consistent mass m.Four-node plane stress elements, full integration

0 1 2 3 4 5 6 7 8 9 100
2000
4000
6000
8000
10000fre kve nce analyticke axialni (x), ohybove (o) a MKP fre kve nce (*)
1 1.5 2 2.5 3 3.5 4 4.5 50
5
10
15
20
25
kons is te ntni formulace
re lativni chyba v % pro axialni (x) a ohybove (o) fre kve nce0 1 2 3 4 5 6 7 8 9 10
0
2000
4000
6000
8000
10000fre kve nce analyticke axialni (x), ohybove (o) a MKP fre kve nce (*)
1 1.5 2 2.5 3 3.5 4 4.5 5-20
-10
0
10
20
diagonalni formulace
re lativni chyba v % pro axialni (x) a ohybove (o) fre kve nce
Relative errors for axial (x) and bending (o) freq.
Relative errors for axial (x) and bending (o) freq.
Eigenfrequencies
of a cantilever beamFour-node bilinear element, plane strain
Relative errors [%] of FE frequencies
x
… axial – continuum, o
… bending – continuum, *
… FE frequencies

1 2 3 kmax
1
2
3
4
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
−−−
=
2
2
22
4sym.221563134135422156
420l
llllll
lAρm
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
−−−
=
2
22
3
2sym.36
323636
2
ll
lllll
lEIk
0qMK =− )( λ
Free transverse vibration of a thin elastic cantilever beam
FE (beam element) vs. continuum approach (Bernoulli_Euler theory)

Free transverse vibration of a thin elastic beamANALYTICAL APPROACH
The equation of motion of a long thin beam considered as continuumundergoing transverse vibration is derived under Bernoulli-Euler assumptions,
namely- there is an axis, say x, of the beam that undergoes no extension,- the x-axis is located along the neutral axis of the beam, - cross sections perpendicular to the neutral axis remain planar during the
deformation – transverse shear deformation is neglected,- material is linearly elastic and homogeneous,- the y-axis, perpendicular to the x-axis, together with x-axis form a principal plane of
the beam.
These assumptions are acceptable for thin beams – the model ignores shear deformations of a beam element and rotary inertia forces.
For more details see Craig, R.R.: Structural Dynamics. John Wiley, New York, 1981 or Clough, R.W. and Penzien, J.: Dynamics of Structures, McGraw-Hill, New York,
1993.

The equation is usually presented in the form
),(2
2
2
2
2
2
txptvA
xvEI
x=
∂∂
+⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
∂∂ ρ
where x is a longitudinal coordinate, v is a transversal displacement of the beam in y
direction, which is perpendicular to x, t is time, E is the Young’s modulus, I is the planar
moment of inertia of the cross section, A is the cross sectional area and ρ is the density.
On the right hand side of the equation there is the loading ),( txp - generally a function
of space and time - acting in the xy plane.For free transverse vibrations we have zero on
the right-hand side of Eq. (1). If the bending stiffness EI is independent of time and
space coordinates we can write

02
2
4
4
=∂∂
+∂∂
tv
EIA
xv ρ
.
(4a) Assuming the steady state vibration in a harmonic form
)cos()(),( ϕω −= txVtxv
we get
0)(d
)(d 44
4
=− xVx
xV λ
(4b) where we have introduced an auxiliary variable by
)/(24 EIAωρλ = (5)

The general solution of Eq. (4) can be assumed (see Kreysig, E.: Advanced Engineering Mathematics, John Wiley & Sons, New York, 1993) in the form
xCxCxCxCxV λλλλ cossincoshsinh)( 4321 +++= (6) where constants 41 to CC depend on boundary conditions. Applying boundary conditions for a thin cantilever beam (clamped – free) we get a
frequency determinant [0, 1, 0, 1 ] [lam, 0, lam, 0 ] [sinh(lam*L)*lam^2, cosh(lam*L)*lam^2, -sin(lam*L)*lam^2, -cos(lam*L)*lam^2] [cosh(lam*L)*lam^3, sinh(lam*L)*lam^3, -cos(lam*L)*lam^3, sin(lam*L)*lam^3]

From the condition that the frequency determinant is equal to zero we get the frequency equation in he form
01coscosh =+LL λλ
Roots of this equation can only be found numerically, Denoting Lx ii λ= we get the natural frequencies in the form
...,3,2,12 == iEAI
Lxi
i ρω

Comparison of analytical and FE results counter continuum frequencies FE frequencies 1 5.26650 4690912090e+002 5.26650 9194371887e+002 2 3.300 462151726965e+003 3.300 571391657554e+003 3 9.24 1389593048039e+003 9.24 3742518773286e+003 4 1.81 0943523875022e+004 1.81 2669270993247e+004 5 2.99 3619402962561e+004 3.00 1165614576545e+004 6 4.4 71949023233439e+004 4.4 96087393371327e+004 7 6. 245945376065551e+004 6. 308228786109306e+004 8 8. 315607746908118e+004 8. 451287572802173e+004 9 1.0 68093617279631e+005 1.0 92740977881639e+005
0 5 10 15 200
1
2
3
4
5
6
7
8
9x 10
5 o - FEM, x - analytical
counter
angular frequencies
0 5 100
0.5
1
1.5
2
2.5relative errors for FE frequencies [%]
counter
Are analytically computedfrequencies exact to be usedas an etalon for error analysis?
To answer this you have to recallthe assumptions used for thethin beam theory
FE computation with10 beam elementsConsistent mass matrixFull integration

Comparison of Beam and Bilinear Elements Used for Cantilever Beam Vibration
• 10 beam elements … the ninth bending frequency with 2.5% error
• 10 beam elements … this element does not yield axial frequencies
• 10 bilinear elements … the first bending frequency with 20% error, the errors goes down with increasing frequency counter
• 10 bilinear elements … the errors of axial frequencies are positive for consistent mass matrix, negative for diagonal mass matrix
• Where is the truth?

Transient problems in linear dynamics, no damping
( )tPKqqM =+&& Modelling the 1D wave equation
2
2202
2
xuc
tu
∂∂
=∂∂

0 0.5 1-0.5
0
0.5
1
1.5eps t = 1.6
0 0.5 10.4
0.6
0.8
1
1.2
1.4dis
0 0.5 1-0.5
0
0.5
1
1.5vel
L1 cons 100 elem Houbolt (red)0 0.5 1
-100
-50
0
50
100acc
Newmark (green), h= 0.005, gamma=0.5
Rod elements used here, the results depend on the method of integration

Classical Lamb’s problem
radial
B
A C
1 m
1 m
axial
p0
Timp
t
L or Q
ElementsL, Q, full int.Consistent massaxisymmetricMeshCoarse 20x20Medium 40x40Fine 80x80Newmark
Loadinga point forceequiv. pressure
Example of a transient problem

Axial displacements for point force loading
Coarse, L
Fine, Q
Fine L and medium Q
Medium L and coarse Q

Axial displacements for pressure loading

0 1 2
x 10-4
0
2000
4000
6000
8000
10000
12000
Point and pres sure loading of the s olid cylinder by a rectangular puls e in time
Time [s ]
Total energy [J]
point Q fine
po int Q medium
po int L fine
point Q c o ars e po int L medium
po int L c oars e
FEM-mo dels with the co nc e ntrate d point-load
Fo r all FEM-mo de ls with dis tributed loads
P -Lcoars eP -LmediumP -LfineP -Qcoars eP -QmediumP -Qfine
Total energy
Pollution-free energy production by a proper misuse of FE analysis

Total energy in cylinder vers us mes h dens ity
0
1000
2000
3000
4000
5000
6000
7000
8000
9000
0 20 40 60 80 100
Me s h de ns ity (c o ars e - me dium - fine )
Pot
entia
l + k
inet
ic e
nerg
y [J
] P oint_LP oint_QP re s s ure _LP re s s ure _Q

1D element for large strains and large deformations
Linear caseNon-linear case (material and geometry)

Bar element, small strains, small displacements, linear material
Approximation of displacements u = [A]q has the form
[ ] u u c c x xcc
U capprox = = + =⎧⎨⎩
⎫⎬⎭
=1 21
2
1 [ ]
and must be valid at nodes as well u qx=
=0 1 a u q
x l== 2 .
Substituting we get q = [S] c,
where qqq
=⎧⎨⎩
⎫⎬⎭
1
2
, [ ]Sl
=⎡
⎣⎢
⎤
⎦⎥
1 01
, ccc
=⎧⎨⎩
⎫⎬⎭
1
2
.
If the length of element is greater than zero, then c = [S]-1 q, kde [ ]Sl l
−=
−⎡
⎣⎢
⎤
⎦⎥
1 1 01 1/ /
.
So the approximation of displacements is [ ] [ ][ ] [ ] u U c U S q A q= = =−1
.
where [ ] [ ] [ ] [ ]A xl l
x l x l a x a x=−
⎡
⎣⎢
⎤
⎦⎥ = − =1
1 01 1
1 1 2/ // / ( ) ( ) .

Approximation of strains ε = [B]q
[ ] ( ) [ ] [ ] ε = = = − = −dd
dd
dd
ux x
A qx
x l x l q l l q1 1 1/ / / / ,
where [ ] [ ]B l l= −1 1/ / . The mass and stiffness matrices are
[ ] [ ] [ ] [ ] [ ]m A A V S A A l Sl
V
l
= = =⎡
⎣⎢
⎤
⎦⎥∫ ∫ρ ρ ρT Td d
0 62 11 2
.
[ ] [ ] [ ][ ] [ ]k B C B Vl
lE l l S x ES
lV
l
= =−⎡
⎣⎢
⎤
⎦⎥ − =
−−
⎡
⎣⎢
⎤
⎦⎥∫ ∫
T d d1
11 1
1 11 10
//
/ / ,
[C] = E – the Young’s modulus.

( ) =⎥⎦
⎤⎢⎣
⎡−
−++=
1111
2 221
021
20300
0L qlql
lCA
k
( ) ⎥⎦
⎤⎢⎣
⎡−
−=⎥
⎦
⎤⎢⎣
⎡−
−=⎥
⎦
⎤⎢⎣
⎡−
−+=
1111
1111
1111
0
20
02
300
02
210
300
0
lCA
ll
CAql
lCA t ξ
where
1221 qqq −=
lql t=+ 210
llt 0/=ξ
⎥⎦
⎤⎢⎣
⎡−
−=
1111
00
0N
lSAk
t
q1 q2
q21
0l
tl
Summary for NL approachK(q) Δq
= P –
F

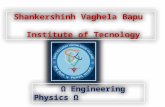
1D stretch experiment with rubber


-200 -150 -100 -50 0 50 100 1500
0.5
1
1.5
2Stre tch vs. force [N] - fitted expe riment data (s olid), FE correct (o) FE linearized (x)
stretch
-150 -100 -50 0 50 100 1502
3
4
5
6
7
8tota l length [m] vs . applied force [N] for initial length = 5
0.7 0.8 0.9 1 1.1 1.2 1.3 1.4 1.5-40
-30
-20
-10
0
10
s tre tch
rela tive e rror [%] for length computed by linea rized approach

C.M. Esher: False perspectives

How to avoid false perspectives?• There are
– Solid theoretical foundations – Efficient hardware– Quickly developing parallel and vector sw
• Goals– Ascertaining validity limits of models … material data are
needed– Design of robust solvers running on parallel platforms
• Tools– Continuum mechanics theory– Engineering judgment – Common sense