Physics 201 - University of Virginiagalileo.phys.virginia.edu/~pqh/201_14n.pdfnut, etc.. What do you...
35
Physics 201 Professor P. Q. Hung 311B, Physics Building Physics 201 – p. 1/1
Transcript of Physics 201 - University of Virginiagalileo.phys.virginia.edu/~pqh/201_14n.pdfnut, etc.. What do you...

Physics 201Professor P. Q. Hung
311B, Physics Building
Physics 201 – p. 1/18

Rotational Kinematics and Energy
Rotational Kinetic Energy, Moment of Inertia
All elements inside the rigid body have thesame angular velocity ω. Also vi = riω
An element mi at a distance ri from the axisof rotation has a kinetic energyKi = 1
2miv
2
i = (1
2mir
2
i )ω2
Physics 201 – p. 2/18

Rotational Kinematics and Energy
Rotational Kinetic Energy, Moment of Inertia
All elements inside the rigid body have thesame angular velocity ω. Also vi = riω
An element mi at a distance ri from the axisof rotation has a kinetic energyKi = 1
2miv
2
i = (1
2mir
2
i )ω2
Physics 201 – p. 2/18

Rotational Kinematics and Energy
Rotational Kinetic Energy, Moment of Inertia
Total kinetic energy of the rigid body:Ktot =
∑
(1
2mir
2
i )ω2 = 1
2(∑
mir2
i )ω2
Moment of Inertia: I =∑
mir2
i ⇒ Ktot = 1
2Iω2
Notice the correspondances: I ↔ m; ω ↔ v
Physics 201 – p. 3/18

Rotational Kinematics and Energy
Rotational Kinetic Energy, Moment of Inertia
Total kinetic energy of the rigid body:Ktot =
∑
(1
2mir
2
i )ω2 = 1
2(∑
mir2
i )ω2
Moment of Inertia: I =∑
mir2
i ⇒ Ktot = 1
2Iω2
Notice the correspondances: I ↔ m; ω ↔ v
Physics 201 – p. 3/18

Rotational Kinematics and Energy
Rotational Kinetic Energy, Moment of Inertia
Total kinetic energy of the rigid body:Ktot =
∑
(1
2mir
2
i )ω2 = 1
2(∑
mir2
i )ω2
Moment of Inertia: I =∑
mir2
i ⇒ Ktot = 1
2Iω2
Notice the correspondances: I ↔ m; ω ↔ v
Physics 201 – p. 3/18

Rotational Kinematics and Energy
Rotational Kinetic Energy, Moment of InertiaSome examples of moments of inertia
Dumbell rotating about its center:
I = mr2 + mr2 = 2mr2
Physics 201 – p. 4/18

Rotational Kinematics and Energy
Rotational Kinetic Energy, Moment of Inertia
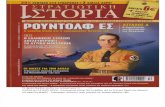
Hoop:
I =∑
mir2
i = (∑
mi)R2 = MR2
Physics 201 – p. 5/18

Rotational Kinematics and Energy
Rotational Kinetic Energy, Moment of Inertia
Physics 201 – p. 6/18

Rotational Kinematics and Energy
Conservation of Energy
Conservation of Energy: U + K = constant
Rolling without slipping:K = 1
2mv2 + 1
2Iω2 = 1
2mv2(1 + I
mr2 )
For example for a rolling sphere: I = 2
5mr2 ⇒
K = 1
2mv2(1 + 2
5) = 7
10mv2.
A rolling hoop: I = mr2 ⇒ K = mv2
Physics 201 – p. 7/18

Rotational Kinematics and Energy
Conservation of Energy
Conservation of Energy: U + K = constant
Rolling without slipping:K = 1
2mv2 + 1
2Iω2 = 1
2mv2(1 + I
mr2 )
For example for a rolling sphere: I = 2
5mr2 ⇒
K = 1
2mv2(1 + 2
5) = 7
10mv2.
A rolling hoop: I = mr2 ⇒ K = mv2
Physics 201 – p. 7/18

Rotational Kinematics and Energy
Conservation of Energy
Conservation of Energy: U + K = constant
Rolling without slipping:K = 1
2mv2 + 1
2Iω2 = 1
2mv2(1 + I
mr2 )
For example for a rolling sphere: I = 2
5mr2 ⇒
K = 1
2mv2(1 + 2
5) = 7
10mv2.
A rolling hoop: I = mr2 ⇒ K = mv2
Physics 201 – p. 7/18

Rotational Kinematics and Energy
Conservation of Energy
Conservation of Energy: U + K = constant
Rolling without slipping:K = 1
2mv2 + 1
2Iω2 = 1
2mv2(1 + I
mr2 )
For example for a rolling sphere: I = 2
5mr2 ⇒
K = 1
2mv2(1 + 2
5) = 7
10mv2.
A rolling hoop: I = mr2 ⇒ K = mv2
Physics 201 – p. 7/18

Rotational Kinematics and Energy
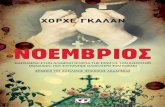
Conservation of EnergyA sphere and a hoop (of same radius) rollingdown an inclined plane of height h.
A block sliding down the same plane:Ui + Ki = mgh + 0; Uf + Kf = 0 + 1
2mv2 ⇒
mgh = 1
2mv2 ⇒ v =
√2gh
Rolling sphere (without slipping):
mgh = 7
10mv2 ⇒ v =
√
10
7gh <
√2gh
A hoop: mgh = mv2 ⇒ v =√
gh
Physics 201 – p. 8/18

Rotational Kinematics and Energy
Conservation of EnergyA sphere and a hoop (of same radius) rollingdown an inclined plane of height h.
A block sliding down the same plane:Ui + Ki = mgh + 0; Uf + Kf = 0 + 1
2mv2 ⇒
mgh = 1
2mv2 ⇒ v =
√2gh
Rolling sphere (without slipping):
mgh = 7
10mv2 ⇒ v =
√
10
7gh <
√2gh
A hoop: mgh = mv2 ⇒ v =√
gh
Physics 201 – p. 8/18

Rotational Kinematics and Energy
Conservation of EnergyA sphere and a hoop (of same radius) rollingdown an inclined plane of height h.
A block sliding down the same plane:Ui + Ki = mgh + 0; Uf + Kf = 0 + 1
2mv2 ⇒
mgh = 1
2mv2 ⇒ v =
√2gh
Rolling sphere (without slipping):
mgh = 7
10mv2 ⇒ v =
√
10
7gh <
√2gh
A hoop: mgh = mv2 ⇒ v =√
gh
Physics 201 – p. 8/18

Rotational Kinematics and Energy
Conservation of EnergyWhich one is fastest?
mgh = 1
2mv2 + 1
2Iω2
Hoop: Krotation = 1
2Ihoopω
2; Sphere (of sameradius): Krotation = 1
2Isphereω
2
Krotation,hoop > Krotation,sphere ⇒ Less energyfrom mgh converted into the translation K.E.for the hoop ⇒ It arrives at the bottom last.
Physics 201 – p. 9/18

Rotational Kinematics and Energy
Conservation of EnergyWhich one is fastest?
mgh = 1
2mv2 + 1
2Iω2
Hoop: Krotation = 1
2Ihoopω
2; Sphere (of sameradius): Krotation = 1
2Isphereω
2
Krotation,hoop > Krotation,sphere ⇒ Less energyfrom mgh converted into the translation K.E.for the hoop ⇒ It arrives at the bottom last.
Physics 201 – p. 9/18

Rotational Kinematics and Energy
Conservation of EnergyWhich one is fastest?
mgh = 1
2mv2 + 1
2Iω2
Hoop: Krotation = 1
2Ihoopω
2; Sphere (of sameradius): Krotation = 1
2Isphereω
2
Krotation,hoop > Krotation,sphere ⇒ Less energyfrom mgh converted into the translation K.E.for the hoop ⇒ It arrives at the bottom last.
Physics 201 – p. 9/18

Rotational Dynamics and Static Equilibrium
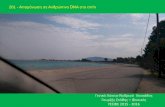
TorqueYou want to rotate a wheel from rest, to loosen anut, etc.. What do you do?
Physics 201 – p. 10/18

Rotational Dynamics and Static Equilibrium
Torque
Look at Fig. 11-1. For the most efficient wayof doing that, we would apply the force in thedirection which is perpendicular to the wheelpoke or to the wrench. For other angles, theeffect of the applied force will be less. Inaddition, it turns out that it is more efficient if itis applied as far as possible from the axis ofrotation. This tells us that we should look for aquantity that can exhibit such a behaviour.
Physics 201 – p. 11/18

Rotational Dynamics and Static Equilibrium
Torque
Furthermore, as long as we keep applying theforce, the object (wheel, wrench,..) turnsfaster and faster. That means it has anangular acceleration α. For linear dynamics, anet force gives rise to an linear acceleration.What gives rise to α? The Torque: ~τ . It is alsoa vector!
Physics 201 – p. 12/18

Rotational Dynamics and Static Equilibrium
Torque
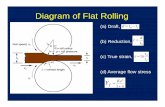
Torque: τ = rF sin θ; θ: angle of the forcerelative to the radial line.
The force ~F can be decomposed into acomponent F cos θ, along the radial line and acomponent F sin θ perpendicular to the radialline and tangential to the trajectory. Accordingto the above statement, only the lattercomponent contributes to the torque.
Physics 201 – p. 13/18

Rotational Dynamics and Static Equilibrium
Torque
Torque: τ = rF sin θ; θ: angle of the forcerelative to the radial line.
The force ~F can be decomposed into acomponent F cos θ, along the radial line and acomponent F sin θ perpendicular to the radialline and tangential to the trajectory. Accordingto the above statement, only the lattercomponent contributes to the torque.
Physics 201 – p. 13/18

Rotational Dynamics and Static Equilibrium
Torque
Physics 201 – p. 14/18

Rotational Dynamics and Static Equilibrium
Torque
Torque as a vector: ~τ = ~r × ~F : Vectorproduct.
~C = ~A × ~B. ~C perpendicular to both ~A and ~B.|~C| = AB sin θ.
Physics 201 – p. 15/18

Rotational Dynamics and Static Equilibrium
Torque
Torque as a vector: ~τ = ~r× ~F : Vector product.
~C = ~A × ~B. ~C perpendicular to both ~A and ~B.|~C| = AB sin θ.
Physics 201 – p. 15/18

Rotational Dynamics and Static Equilibrium
Torque and Angular acceleration
Take an object of mass m and attach it to oneend of a massless rod of length r. Apply aforce ~F on the object. As we have seen, onlythe component Ft = mat tangential to thetrajectory contributes. The torque on theparticle is τ = rFt = rmat. But at = rα
τ = mr2α = Iα or ~τ = I~α
Physics 201 – p. 16/18

Rotational Dynamics and Static Equilibrium
Torque and Angular acceleration
Take an object of mass m and attach it to oneend of a massless rod of length r. Apply aforce ~F on the object. As we have seen, onlythe component Ft = mat tangential to thetrajectory contributes. The torque on theparticle is τ = rFt = rmat. But at = rα
τ = mr2α = Iα or ~τ = I~α
Physics 201 – p. 16/18

Rotational Dynamics and Static Equilibrium
Torque and Angular acceleration: ExampleA rigid massless rod of length L = 0.83 m hastwo objects of mass m = 0.25 kg each attachedto each end of the rod as shown in class. Therod rotates with the axis of rotation going throughthe center of the rod. The initial angular speed isω0 = 2.1 rad/s. A force F = 9.6 N is applied toone of the two objects and tangential to thecircular trajectory, and for t = 2 s. Find the final ω
Physics 201 – p. 17/18

Rotational Dynamics and Static Equilibrium
Torque and Angular acceleration: Example
Use ω = ω0 + αt. What’s α?
α = τ/I. Find τ and I.
τ = rF = (L/2)F andI = m(L
2)2 + m(L
2)2 = 1
2mL2.
α = FmL
.
ω = ω0 + FmL
t = 94.6rad/s
Physics 201 – p. 18/18

Rotational Dynamics and Static Equilibrium
Torque and Angular acceleration: Example
Use ω = ω0 + αt. What’s α?
α = τ/I. Find τ and I.
τ = rF = (L/2)F andI = m(L
2)2 + m(L
2)2 = 1
2mL2.
α = FmL
.
ω = ω0 + FmL
t = 94.6rad/s
Physics 201 – p. 18/18

Rotational Dynamics and Static Equilibrium
Torque and Angular acceleration: Example
Use ω = ω0 + αt. What’s α?
α = τ/I. Find τ and I.
τ = rF = (L/2)F andI = m(L
2)2 + m(L
2)2 = 1
2mL2.
α = FmL
.
ω = ω0 + FmL
t = 94.6rad/s
Physics 201 – p. 18/18

Rotational Dynamics and Static Equilibrium
Torque and Angular acceleration: Example
Use ω = ω0 + αt. What’s α?
α = τ/I. Find τ and I.
τ = rF = (L/2)F andI = m(L
2)2 + m(L
2)2 = 1
2mL2.
α = FmL
.
ω = ω0 + FmL
t = 94.6rad/s
Physics 201 – p. 18/18

Rotational Dynamics and Static Equilibrium
Torque and Angular acceleration: Example
Use ω = ω0 + αt. What’s α?
α = τ/I. Find τ and I.
τ = rF = (L/2)F andI = m(L
2)2 + m(L
2)2 = 1
2mL2.
α = FmL
.
ω = ω0 + FmL
t = 94.6rad/s
Physics 201 – p. 18/18