Μετασχηματισμοί Laplacelpre.cperi.certh.gr/auth/files/DYN_2011_Append_Α.C.pdf ·...
73
437 ΠΑΡΑΡΤΗΜΑ Α Μετασχηματισμοί Laplace Ο μετασχηματισμός Laplace μας επιτρέπει να μετατρέψουμε γραμμικές διαφορικές με σταθερούς συντελεστές και ολοκληρωτικοδιαφορικές εξισώσεις σε αλγεβρικές εξισώσεις, των οποίων η επίλυση είναι ευκολότερη. Ο μετασχηματισμός Laplace είναι ένας τελεστής, ο οποίος μετασχηματίζει μία συνάρτηση πραγματικής μεταβλητής, συνήθως ως προς το χρόνο, σε μία συνάρτηση της μιγαδικής μεταβλητής s σύμφωνα με τον ακόλουθο ορισμό: dt ) t ( f e ) s ( F )} t ( f { L 0 st ∫ ∞ − = = (A.1) όπου L συμβολίζει το μετασχηματισμό Laplace και F(s) τη συνάρτηση της μιγαδικής μεταβλητής s = σ + iω, i = 1 − . Ο μετασχηματισμός Laplace της f(t) υπάρχει όταν το αόριστο ολοκλήρωμα (A.1) συγκλίνει. Το τελευταίο θα ισχύει εάν η συνάρτηση f(t) είναι φραγμένη, δηλαδή για κάποιες πεπερασμένες θετικές τιμές των Μ και σ ικανοποιείται η ακόλουθη ανισότητα: ∫ ∞ − ≤ 0 t M dt e ) t ( f σ Επομένως, ο μετασχηματισμός Laplace της 2 t e δεν υπάρχει αφού η συνάρτηση f(t) = 2 t e δεν ικανοποιεί την παραπάνω ανισότητα. Αντίθετα, η συνάρτηση 2 t e − μπορεί να μετασχηματιστεί κατά Laplace. Έστω ότι L{f(t)} = F(s). Τότε ο αντίστροφος μετασχηματισμός Laplace της F(s) είναι επίσης ένας γραμμικός ολοκληρωτικός μετασχηματισμός που ορίζεται από το μιγαδικό ολοκλήρωμα των Fourier – Mellin ως εξής:
Transcript of Μετασχηματισμοί Laplacelpre.cperi.certh.gr/auth/files/DYN_2011_Append_Α.C.pdf ·...

437
ΠΑΡΑΡΤΗΜΑ Α
Μετασχηματισμοί Laplace
Ο μετασχηματισμός Laplace μας επιτρέπει να μετατρέψουμε γραμμικές διαφορικές με σταθερούς συντελεστές και ολοκληρωτικοδιαφορικές εξισώσεις σε αλγεβρικές εξισώσεις, των οποίων η επίλυση είναι ευκολότερη. Ο μετασχηματισμός Laplace είναι ένας τελεστής, ο οποίος μετασχηματίζει μία συνάρτηση πραγματικής μεταβλητής, συνήθως ως προς το χρόνο, σε μία συνάρτηση της μιγαδικής μεταβλητής s σύμφωνα με τον ακόλουθο ορισμό:
dt)t(fe)s(F)t(fL0
st∫∞
−== (A.1)
όπου L συμβολίζει το μετασχηματισμό Laplace και F(s) τη συνάρτηση της μιγαδικής
μεταβλητής s = σ + iω, i = 1− .
Ο μετασχηματισμός Laplace της f(t) υπάρχει όταν το αόριστο ολοκλήρωμα (A.1) συγκλίνει. Το τελευταίο θα ισχύει εάν η συνάρτηση f(t) είναι φραγμένη, δηλαδή για κάποιες πεπερασμένες θετικές τιμές των Μ και σ ικανοποιείται η ακόλουθη ανισότητα:
∫∞
− ≤0
t Mdte)t(f σ
Επομένως, ο μετασχηματισμός Laplace της 2te δεν υπάρχει αφού η συνάρτηση f(t) =
2te
δεν ικανοποιεί την παραπάνω ανισότητα. Αντίθετα, η συνάρτηση 2te− μπορεί να
μετασχηματιστεί κατά Laplace.
Έστω ότι Lf(t) = F(s). Τότε ο αντίστροφος μετασχηματισμός Laplace της F(s) είναι επίσης ένας γραμμικός ολοκληρωτικός μετασχηματισμός που ορίζεται από το μιγαδικό ολοκλήρωμα των Fourier – Mellin ως εξής:

438 Δυναμική Ανάλυση των Συστημάτων
L-1F(s) = c iω
stω
c iω
1 lim e F(s)ds2πi
+
→∞−∫ = f(t) (A.2)
όπου L-1 συμβολίζει τον αντίστροφο μετασχηματισμό Laplace, και c είναι μια πραγματική σταθερά.
Α.1 Ιδιότητες του Μετασχηματισμού Laplace
Στη συνέχεια, παρουσιάζονται οι σημαντικότερες ιδιότητες του μετασχηματισμού Laplace.
Γραμμικότητα. Ο μετασχηματισμός Laplace του γραμμικού αθροίσματος δύο συναρτήσεων f1(t) και f2(t) ισούται με το γραμμικό άθροισμα των μετασχηματισμένων συναρτήσεων F1(s) και F2(s). Συγκεκριμένα,
)s(F)s(Fdte)t(f)t(f)t(f)t(fL 2210
1st
22112211 αααααα +=+=+ ∫∞
− (A.3)
Μετασχηματισμός Laplace πρώτης παραγώγου. Ο μετασχηματισμός Laplace της πρώτης παραγώγου της συνάρτησης f(t) δίνεται από τη σχέση:
⎭⎬⎫
⎩⎨⎧
dt)t(f(dL = st
0
df e dtdt
∞−∫ = sF(s) – f (0) (A.4)
όπου f(0) είναι η αρχική τιμή της συνάρτησης.
Απόδειξη: Με τη βοήθεια του τύπου ολοκλήρωσης κατά παράγοντες λαμβάνουμε:
∫ ∫ ′−=′b
a
b
a
ba dx)x(g)x(f)x(g)x(fdx)x(g)x(f
( ) =−==⎭⎬⎫
⎩⎨⎧ −
∞∞−−∞
∫∫ dtedtd)t(fe)t(fdte
dtdf
dt)t(df
L st
00
stst
0
st
0
f (0) s f (t)e dt sF(s) f (0)∞
−− + = −∫
Μετασχηματισμός Laplace παραγώγου n-τάξης. Ο μετασχηματισμός Laplace της n-παραγώγου της συνάρτησης f(t) είναι:

ΠΑΡΑΡΤΗΜΑ Α: Μετασχηματισμοί Laplace 439
)0(f)0(sf...)0(fs)0(fs)s(Fsdt
)t(fdL )1n()2n()1(2n1nnn
n−−−− −−−−−=
⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
(A.5)
όπου f(n)(0) είναι η τιμή της n-παραγώγου της συνάρτησης f(t) για t=0.
Μετασχηματισμός Laplace του ολοκληρώματος μιας συνάρτησης. Ο μετασχηματισμός
Laplace του ορισμένου ολοκληρώματος ∫ ′′t
0dt)t(f δίνεται από τη σχέση:
)s(Fs1t
0dt)t(fL =⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧∫ ′′ (A.6)
Απόδειξη: Από τον ορισμό (A.1) έχουμε:
( )t t t
st st
0 0 0 0 0
t tst st st
0 0 0 00
1 dL f (t )dt e f (t )dt dt e f (t )dt dts dt
1 1 d 1 1e f (t )dt e f (t )dt dt e f (t)dt F(s)s s dt s s
∞ ∞− −
∞ ∞ ∞− − −
⎧ ⎫ ⎧ ⎫ ⎛ ⎞⎪ ⎪ ⎪ ⎪′ ′ = ′ ′ = − ⎜ ′ ′⎟ =⎨ ⎬ ⎨ ⎬ ⎜ ⎟⎪ ⎪ ⎪ ⎪⎩ ⎭ ⎩ ⎭ ⎝ ⎠
⎧ ⎫ ⎛ ⎞⎪ ⎪− ′ ′ + ⎜ ′ ′⎟ = =⎨ ⎬ ⎜ ⎟⎪ ⎪⎩ ⎭ ⎝ ⎠
∫ ∫ ∫ ∫ ∫
∫ ∫ ∫ ∫
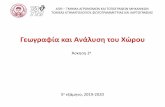
Μετατόπιση στο πεδίο του χρόνου. Έστω οι χρονικές συναρτήσεις f(t) και f(t-τ). Η f(t – τ) θα είναι ίση με την προς τα δεξιά χρονικά μετατοπισμένη συνάρτηση f(t), όπου τ είναι η χρονική σταθερά μετατόπισης (βλέπε Εικόνα Α.1). Ο μετασχηματισμός Laplace της μετατοπισμένης συνάρτησης f(t-τ) θα δίνεται από την ακόλουθη σχέση:
Εικόνα Α.1: Μετατόπιση συνάρτησης στο πεδίο του χρόνου.

440 Δυναμική Ανάλυση των Συστημάτων
)s(Fe)t(fL sττ −=− (A.7)
Απόδειξη: Αν θέσουμε t' = t – τ, θα έχουμε
'dte)'t(fedte)t(f)t(fL 'stsst
0∫∫∞
−
−−−∞
=−=−τ
τττ
Όμως, για t'<0 ισχύει: f(t')=0. Συνεπώς,
sτL f (t τ) e F(s)−− =
Μετατόπιση στο πεδίο της μιγαδικής μεταβλητής. Αντίστοιχα, για τη μετατόπιση στο μιγαδικό επίπεδο θα ισχύει:
)as(F)t(feL at +=− (A.8)
Απόδειξη: Από τον ορισμό (A.1) έχουμε:
)as(Fdte)t(fdtee)t(f)t(feL0
t)as(st
0
atat +=== ∫∫∞
+−−∞
−−
Αλλαγή χρονικής κλίμακας. Μια άλλη ιδιότητα του μετασχηματισμού Laplace είναι εκείνη που σχετίζεται με την αλλαγή της κλίμακας χρόνου. Η συνάρτηση f(at) διαφέρει από την f(t) στην κλίμακα χρόνου κατά a μονάδες. Για τις δύο αυτές συναρτήσεις ισχύει η σχέση:
Lf(at) = 1a
F sa
⎛ ⎞⎜ ⎟⎝ ⎠
(A.9)
Απόδειξη: Από τον ορισμό (A.1) έχουμε:
s (at)st a
0 0
1Lf (at) f (at)e dt f (at)e d(at)a
∞ ∞ −−= =∫ ∫
Αν εφαρμόσουμε το μετασχηματισμό λ = at, θα έχουμε
s λa
0
1 1 sLf (at) Lf (λ) f (λ)e d(λ) Fa a a
∞ − ⎛ ⎞= = = ⎜ ⎟⎝ ⎠∫

ΠΑΡΑΡΤΗΜΑ Α: Μετασχηματισμοί Laplace 441 Το θεώρημα της αρχικής τιμής. Το θεώρημα αυτό αναφέρεται στη συμπεριφορά μιας συνάρτησης f(t) καθώς t→0, γι’αυτό ονομάζεται θεώρημα της αρχικής τιμής. Με την προϋπόθεση ότι η πρώτη παράγωγος f(1)(t) μπορεί να μετασχηματισθεί κατά Laplace, το θεώρημα αυτό διατυπώνεται ως εξής:
t 0 slim f (t) lim sF(s)→ →∞
= (A.10)
Απόδειξη: Από την εξίσωση (A.4) παρατηρούμε ότι το όριο του ολοκληρώματος
st
0
df e dtdt
∞−∫ για t→0 θα είναι ίσο με μηδέν. Αντίστοιχα, το όριο του τρίτου μέρους στην
εξίσωση (A.4) για s→∞ είναι:
s[sF(s) f (0)] 0lim
→∞− = ή
t 0 slim f(t) lim sF(s)→ →∞
=
Το θεώρημα της τελικής τιμής. Το θεώρημα αυτό αναφέρεται στη συμπεριφορά της συνάρτησης f(t) καθώς t→∞, γι’ αυτό και ονομάζεται θεώρημα της τελικής τιμής. Με την προϋπόθεση ότι η f(1)(t) μπορεί να μετασχηματισθεί κατά Laplace και ο παρονομαστής της ρητής συνάρτησης sF(s) δεν έχει ρίζες στον άξονα των φανταστικών αριθμών ή στο δεξιό μιγαδικό ημιεπίπεδο, το θεώρημα αυτό διατυπώνεται ως εξής:
t s 0lim f (t) limsF(s)→∞ →
= (A.11)
Απόδειξη: Υπολογίζουμε πρώτα το όριο του δεύτερου όρου στην εξίσωση (Α.4) για t→∞ και s→0.
t(1) st (1) (1)
s 0 t t t0 0 0
lim f (t)e dt f (t)dt lim f (λ)dλ lim[f (t) f (0)] lim f (t) f (0)∞ ∞
−
→ →∞ →∞ →∞= = = − = −∫ ∫ ∫
Ακολούθως, υπολογίζουμε το όριο του τρίτου μέρους στην εξίσωση (A.4).
s 0 s 0lim[sF(s) f (0)] limsF(s) f (0)→ →
− = −
Εξισώνοντας τα δύο παραπάνω αποτελέσματα, λαμβάνουμε τη σχέση (A.11).
Παρατήρηση: Τα θεωρήματα της αρχικής και της τελικής τιμής επιτρέπουν τον προσδιορισμό της αρχικής και τελικής τιμής της συνάρτησης f(t), χωρίς να υπολογίσουμε τον αντίστροφο μετασχηματισμό Laplace της F(s).

442 Δυναμική Ανάλυση των Συστημάτων Πολλαπλασιασμός συνάρτησης επί t. Στην περίπτωση αυτή, ισχύει η σχέση:
Ltf(t) )s(Fdsd
−= (A.12)
Απόδειξη. Διαφορίζοντας την εξίσωση (A.1) ως προς s λαμβάνουμε:
∫∞
− =−=0
stdte)t(tf)s(Fdsd = – Ltf(t)
που είναι ακριβώς η εξίσωση (A.12). Στη γενική περίπτωση, θα ισχύει η σχέση:
Ltnf(t) )s(Fdsd)1( n
nn−= (A.13)
Διαίρεση συνάρτησης δια t. Στην περίπτωση αυτή, ισχύει η σχέση:
s
f (t)L F(s)dst
∞⎧ ⎫ =⎨ ⎬⎩ ⎭ ∫ (A.14)
Απόδειξη. Αν ολοκληρώσουμε την (A.1) από s έως ∞ προκύπτει:
σt σt
s s 0 0 s
σt st
0 s 0
F(s)ds f (t)e dt dσ f (t)e dσ dt
f (t) f (t) f (t) de dt e dt Lt t t
∞ ∞ ∞ ∞ ∞− −
∞ ∞ ∞− −
⎡ ⎤ ⎡ ⎤= =⎢ ⎥ ⎢ ⎥
⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦
⎡ ⎤ ⎧ ⎫= − = =⎢ ⎥ ⎨ ⎬⎩ ⎭⎢ ⎥⎣ ⎦
∫ ∫ ∫ ∫ ∫
∫ ∫ ∫
Α.2 Μετασχηματισμοί Laplace Βασικών Συναρτήσεων
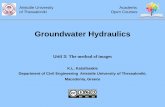
Μοναδιαία βηματική συνάρτηση. Η γραφική παράσταση της μοναδιαίας βηματικής συνάρτησης παρουσιάζεται στην Εικόνα Α.2.
Η μαθηματική διατύπωση της μοναδιαίας βηματικής συνάρτησης είναι:
f(t) = ⎪⎩
⎪⎨⎧
>
<=
0t , 1
0 t, 0)t(H (A.15)

ΠΑΡΑΡΤΗΜΑ Α: Μετασχηματισμοί Laplace 443
Εικόνα Α.2: Μοναδιαία βηματική συνάρτηση.
Ο μετασχηματισμός Laplace της μοναδιαίας βηματικής συνάρτησης (A.15) εύκολα υπολογίζεται από την εφαρμογή της εξίσωσης (A.1):
st st st
00 0
1 1LH(t) e H(t)dt e dt es s
∞ ∞ ∞− − −= = = − =∫ ∫ (A.16)
Ανάλογα, ο μετασχηματισμός Laplace της μοναδιαίας βηματικής συνάρτησης που εφαρμόζεται την χρονική στιγμή to>0, είναι:
s1e)tt(HL ost
0−=− (A.17)
Γενικά, εάν f(t) είναι μια βηματική συνάρτηση μεγέθους a,
oo
o
0 , t tf (t) aΗ(t t )
a , t t<⎧
= − = ⎨ >⎩ (A.18)
τότε, η μετασχηματισμένη κατά Laplace συνάρτηση F(s) θα είναι:
ostaLf (t) es
−= (A.19)
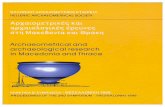
Μοναδιαία συνάρτηση πύλης. Η γραφική παράσταση της μοναδιαίας συνάρτησης πύλης παρουσιάζεται στην Εικόνα Α.3.
Η αλγεβρική έκφραση της μοναδιαίας συνάρτησης πύλης είναι:

444 Δυναμική Ανάλυση των Συστημάτων
Εικόνα Α.3: Μοναδιαία συνάρτηση πύλης.
0, t 01 1f (t) 1/ b, 0 t b H(t) H(t b)b b
0, t b
<⎧ ⎫⎪ ⎪⎪ ⎪= < < = − −⎨ ⎬⎪ ⎪
>⎪ ⎪⎩ ⎭
(A.20)
Συνεπώς, ο μετασχηματισμός Laplace της συνάρτησης (A.20) είναι:
sbst sb
0
1 1 1 1 1 1 eLf (t) H(t) H(t b) e dt eb b bs bs b s
∞ −− − ⎛ ⎞−⎡ ⎤= − − = − = ⎜ ⎟⎢ ⎥⎣ ⎦ ⎝ ⎠
∫ (A.21)
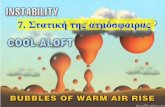
Συνάρτηση μοναδιαίου στιγμιαίου παλμού. Η συνάρτηση Dirac δέλτα, δ(t), ορίζεται από το όριο της μοναδιαίας συνάρτησης πύλης για b→0. Η γραφική παράσταση της μοναδιαίας παλμικής συνάρτησης δίνεται στην Εικόνα Α.4.
∞
Εικόνα Α.4: Μοναδιαία παλμική συνάρτηση.

ΠΑΡΑΡΤΗΜΑ Α: Μετασχηματισμοί Laplace 445 Η αλγεβρική διατύπωση της μοναδιαίας παλμικής συνάρτησης είναι:
⎪⎩
⎪⎨⎧
≠
=∞=
0t,0
0t,)t(δ (A.22)
Το ολοκλήρωμα της δ(t) όταν ο χρόνος μεταβάλλεται από –∞ σε +∞, είναι:
ε
ε
δ(t)dt δ(t)dt 1∞ +
−∞ −
= =∫ ∫ (A.23)
Ο μετασχηματισμός Laplace της δ(t) εύκολα προκύπτει από την εξίσωση (A.21) για b→0. Συνεπώς, υπολογίζοντας το όριο της εξίσωσης (A.21) για b→0, λαμβάνουμε:
sbsb sb
b 0 b 0 b 0
d(1 e ) / db1 1 e seL (t) lim lim lim 1b s d(sb) db s
−− −
→ → →
⎡ ⎤⎡ ⎤ ⎡ ⎤⎢ ⎥⎢ ⎥ ⎢ ⎥
⎢ ⎥ ⎢ ⎥⎢ ⎥⎣ ⎦ ⎣ ⎦⎣ ⎦
−−δ = = = = (A.24)
Επικλινής συνάρτηση με κλίση a. Η γραφική παράσταση της επικλινούς συνάρτησης δίνεται στην Εικόνα Α.5.
Η αλγεβρική έκφραση της επικλινούς συνάρτησης με κλίση a είναι:
f(t) = atH(t) (A.25)
Συνεπώς, ο μετασχηματισμός Laplace της επικλίνους συνάρτησης είναι:
20
stsadteat)t(atHL)t(fL === ∫
∞− (A.26)
Εικόνα Α.5: Επικλινής συνάρτηση.

446 Δυναμική Ανάλυση των Συστημάτων Πολυωνυμική συνάρτηση ως προς την ανεξάρτητη μεταβλητή. Έστω f(t) είναι μια εκθετική συνάρτηση ως προς την ανεξάρτητη μεταβλητή t, της μορφής:
f(t) = a nt (A.27)
όπου n είναι κάποιος ακέραιος θετικός αριθμός. Ο μετασχηματισμός Laplace της συνάρτησης (A.27) είναι:
1nn
s!anatL+
= (A.28)
Hμιτονοειδής Συνάρτηση. Έστω f(t) είναι μια ημιτονοειδής συνάρτηση με πλάτος a.
f(t) = asin(ωt) (A.29)
Εύκολα αποδεικνύεται ότι ο μετασχηματισμός Laplace της συνάρτησης (A.29) είναι:
Lasin(ωt) = 22saωω+
(A.30)
Έστω η συνημιτονοειδής συνάρτηση με πλάτος a.
f(t) = acos(ωt) (A.31)
Ο αντίστοιχος μετασχηματισμός Laplace της συνάρτησης (A.31) θα είναι:
Lacos(ωt) = 22sasω+
(A.32)
Εκθετική συνάρτηση. Έστω η εκθετική συνάρτηση
ate)t(f −= (A.33)
Ο μετασχηματισμός Laplace της εκθετικής συνάρτησης είναι:
as1e
as1dteeeL
0
t)as(st
0
atat+
=+
−==∞
+−−∞
−− ∫ (A.34)
Στον Πίνακα Α.1 παρουσιάζονται οι μετασχηματισμοί Laplace, F(s), τυπικών χρονικών συναρτήσεων, f(t).

ΠΑΡΑΡΤΗΜΑ Α: Μετασχηματισμοί Laplace 447
Πίνακας Α.1: Μετασχηματισμοί Laplace διαφορικών και γινομένων
f(t) Lf(t) = F(s) f(t) Lf(t) = F(s)
dfdt
sF(s) – f(0) t2 dfdt
s2
2d F(s)
ds + 2 dF(s)
ds
2
2d fdt
s2F(s) – sf(0) – f΄(0) t 2
2d fdt
– s2 dF(s)ds
– 2sF(s) + f(0)
t dfdt
– s dF(s)ds
– F(s) t22
2d fdt
– s2
2
2d F(s)
ds + 4s dF(s)
ds +
2F(s)
Στον Πίνακα Α.2 παρουσιάζονται οι μετασχηματισμοί Laplace των διαφορικών όρων (df/dt) και (d2f/dt2) καθώς και των γινομένων τους με την ανεξάρτητη μεταβλητή t (και t2). Οι μετασχηματισμοί αυτοί μας επιτρέπουν να επιλύσουμε ορισμένες κατηγορίες γραμμικών διαφορικών εξισώσεων με μη σταθερούς συντελεστές.
Πίνακας Α.2: Μετασχηματισμοί Laplace τυπικών χρονικών συναρτήσεων, f(t)
α/α F(s) f(t)
1. 1/s 1 Η(t) 2. 1/s2 t
3. 1/sn n 1t /(n 1)!− −
4. 1 (s α)+ αte−
5. 1s
1+τ
t / τ1 eτ
−
6. 21
(s α)+ tte α−
7. n1 (n 1, 2, ...)
(s α)=
+t1n et
)!1n(1 α−−−
8. )bs)(s(1
+α+ )ee(
)b(1 btt −− −−
αα
9. )bs)(s(s
+α+ )ebe(
)b(1 tbt ααα
−− −−
10. 22 bsb+
sin bt

448 Δυναμική Ανάλυση των Συστημάτων
Πίνακας Α.2 (συνέχεια):
α/α F(s) f(t)
11. 22 bsb−
sinh bt
12. 22 bss+
cos bt
13. 22 bss−
cosh bt
14. 22 b)s(b++ α
btsine tα−
15. 22 b)s(s
++
+
αα btcose tα−
16. kΓ(k) (k 0)s
≥ 1kt −
17. kΓ(k) (k 0)
(s α)≥
+ t1k et α−−
18. f(s+α) )t(fe tα−
19. )s(fe bs− f(t-b) και f(t) = 0 για t<b
Παράδειγμα Α.1: Εφαρμογή του μετασχηματισμού Laplace στην επίλυση διαφορικών εξισώσεων
Άσκηση 1: Να μετασχηματίσετε κατά Laplace την ακόλουθη ολοκληρωτική-διαφορική εξίσωση:
∫ ′′=+t
0dt)t(ya)t(y3
dtdy ; oy(0) y=
Λύση:
Από την εφαρμογή των ιδιοτήτων των μετασχηματισμών Laplace (βλέπε εξισώσεις (A.4) και (A.6)) λαμβάνουμε:
asY(s) y(0) 3Y(s) Y(s)s
− + =

ΠΑΡΑΡΤΗΜΑ Α: Μετασχηματισμοί Laplace 449 και
2s y(0)Y(s)
s 3s a=
+ −
Άσκηση 2: Να μετασχηματίσετε κατά Laplace την ακόλουθη διαφορική εξίσωση: 3 2
3 2d y d y dy2 3 y(t) 4u(t)dt dt dt
+ + + = ; y(0) y '(0) y ''(0) 0= = =
Λύση:
Από την εφαρμογή της εξίσωσης (A.5), λαμβάνουμε:
3 2s Y(s) s y(0)− 1s y (0)′− y (0)′′− 22(s Y(s) s y(0)+ − y (0)′− ) 3(sY(s) y(0)) Y(s) 4U(s)+ − + =
3 24U(s)Y(s)
s 2s 3s 1=
+ + +
Παράδειγμα Α.2: Εφαρμογή του θεωρήματος της αρχικής τιμής
Να υπολογίσετε την αρχική τιμή της συνάρτησης f(t), από τη μετασχηματισμένη συνάρτησή της F(s):
(s 1) (s 1)F(s)s (s 3) (s 4)
− +=
+ −
Λύση:
Σύμφωνα με το θεώρημα της αρχικής τιμής, η αρχική τιμή της συνάρτησης f(t=0) υπολογίζεται ως εξής:
2 22t 0 s s s s
2
11s (s 1) (s 1) s 1 slim f (t) lim sF(s) lim lim lim 11 12s (s 3) (s 4) s s 12 1s s
→ →∞ →∞ →∞ →∞
−− + −= = = = =
+ − − − − −
Παράδειγμα Α.3: Εφαρμογή του θεωρήματος της τελικής τιμής
Θεωρούμε μια διεργασία πρώτης τάξης στην οποία εισάγεται μια βηματική μεταβολή μεγέθους a. Όπως θα δούμε στο Κεφάλαιο 5, η μετασχηματισμένη μεταβλητή εξόδου, Y(s), της διεργασίας θα δίνεται από την ακόλουθη εξίσωση:

450 Δυναμική Ανάλυση των Συστημάτων
pK aY(s)τs 1 s
⎛ ⎞= ⎜ ⎟+⎝ ⎠
Να υπολογίσετε την τελική τιμή της y(t) για t→ ∞.
Λύση:
Η τελική τιμή της y(t) για ∞→t προκύπτει από την εφαρμογή του θεωρήματος της τελικής τιμής.
ppt s 0 s 0
K alim (y(t)) lim(s Y(s)) lim K a
τs 1→∞ → →
⎛ ⎞= = =⎜ ⎟+⎝ ⎠
Παράδειγμα Α.4: Μετασχηματισμός Laplace περιοδικής συνάρτησης
Δίνεται η περιοδική συνάρτηση f(t), η οποία ισούται με το άθροισμα των χρονικά μετατοπισμένων συναρτήσεων f1(t), f1(t – T), … κλπ.
f(t) = f1(t)H(t) + f1(t – T)H(t – T) + f1(t – 2T)H(t – 2T) + …
όπου Τ είναι η περίοδος της συνάρτησης f1(t). Να υπολογίσετε το μετασχηματισμό Laplace της f(t).
Λύση:
Σύμφωνα με την εξίσωση (A.7), ο μετασχηματισμός Laplace της παραπάνω συνάρτησης θα είναι:
Lf(t) = F1(s) + F1(s)e-sT + F1(s)e-2sT + … = F1(s)(1 + e-sT + e-2sT + …) = 1sT
F (s)1 e −−
Α.3 Αντίστροφος Μετασχηματισμός Laplace
Ο αντίστροφος μετασχηματισμός Laplace μιας συνάρτησης Y(s) δίνεται από τη σχέση (A.2). Επειδή όμως ο υπολογισμός του ολοκληρώματος (Α.2) είναι συνήθως δύσκολος και χρονοβόρος, ο αντίστροφος μετασχηματισμός Laplace της Y(s) υπολογίζεται με τη βοήθεια κατάλληλων μεθόδων που θα αναλύσουμε στη συνέχεια. Συγκεκριμένα, στην περίπτωση που η Y(s) είναι μια ρητή συνάρτηση (και αυτή είναι η περίπτωση που θα μας απασχολήσει), τότε η συνάρτηση Y(s) δύναται να αναλυθεί σε άθροισμα μερικών

ΠΑΡΑΡΤΗΜΑ Α: Μετασχηματισμοί Laplace 451 κλασμάτων. Ακολούθως, ο αντίστροφος μετασχηματισμός Laplace της συνάρτησης Y(s) υπολογίζεται εύκολα με τη βοήθεια των αποτελεσμάτων του Πίνακα Α.1.
Επομένως, κύριος σκοπός μας είναι η ανάπτυξη μιας ρητής συνάρτησης σε άθροισμα μερικών κλασμάτων. Για το σκοπό αυτό, θεωρούμε τη ρητή συνάρτηση:
m m 1m m 1 1 o
n n 1n n 1 1 o
b s b s ... b s bb(s)Y(s)a(s) a s a s ... a s a
−−
−−
+ + + += =
+ + + + ; όπου n>m (A.35)
Έστω z1, z2,…, zm και p1, p2,…, pn είναι οι ρίζες των πολυωνύμων b(s) και a(s), αντίστοιχα. Συνεπώς, η εξίσωση (A.35) γράφεται:
m 1 2 m
n 1 2 n
b (s z )(s z )...(s z )b(s)Y(s)a(s) a (s p )(s p )...(s p )
⎛ ⎞− − −= = ⎜ ⎟− − −⎝ ⎠
(A.36)
Εάν οι ρίζες p1, p2, …, pn είναι διακεκριμένες, τότε η εξίσωση (A.36) αναλύεται στους ακόλουθους όρους:
1 2 n
1 2 n
k k kb(s)Y(s) ...a(s) (s p ) (s p ) (s p )
= = + + +− − −
(A.37)
Ακολούθως, υπολογίζουμε τον αντίστροφο μετασχηματισμό Laplace της εξίσωσης (A.37):
1 1 1 11 2 n
1 2 n
k k kL Y(s) L L ... L(s p ) (s p ) (s p )
− − − −⎧ ⎫ ⎧ ⎫ ⎧ ⎫= + + +⎨ ⎬ ⎨ ⎬ ⎨ ⎬− − −⎩ ⎭ ⎩ ⎭ ⎩ ⎭
(A.38)
Τελικά, με τη βοήθεια του Πίνακα Α.1 λαμβάνουμε:
1 2 ntp tp tp11 2 ny(t) L Y(s) k e k e ... k e−= = + + + (A.39)
Α.3.1 Προσδιορισμός των Συντελεστών k1, k2,…, kn
Πραγματικές ρίζες: Στην περίπτωση που οι ρίζες του πολυωνύμου του παρονομαστή, a(s), είναι πραγματικές και διακεκριμένες, τότε οι συντελεστές ki στην εξίσωση (A.37) υπολογίζονται από την ακόλουθη σχέση για i = 1, 2, …, n.
i in 1 2 is pi
b(s) b(s)k (s p )a(s) a (s p )(s p ) (s p )
=
=
= −− − −… i
n(s p )
(s p )−
−s pi=
(A.40)

452 Δυναμική Ανάλυση των Συστημάτων Παράδειγμα Α.5: Υπολογισμός του L-1Y(s): Περίπτωση πραγματικών διακεκριμένων
ριζών
Να υπολογίσετε τον αντίστροφο μετασχηματισμό Laplace της ακόλουθης συνάρτησης:
2 2
3 2s s 6 s s 6Y(s)
s 2s s 2 (s 1)(s 1)(s 2)− − − −
= =− − + − + −
Λύση:
Από την εφαρμογή της σχέσης (A.37) λαμβάνουμε:
231 2 kk ks s 6Y(s)
(s 1)(s 1)(s 2) s 1 s 1 s 2− −
= = + +− + − − + −
Ακολούθως, από την εξίσωση (A.40), υπολογίζουμε τους συντελεστές k1, k2 και k3.
2
1(s s 6)k
(s 1)− −
=−
(s 1)(s 1)(s 2)
−+ −
s 1
1 1 6 32( 1)
=
− −= =
−
2
2(s s 6)k
(s 1) (s 1)− −
=− +
(s 1)(s 2)
+−
s 1
1 1 6 2( 2)( 3) 3
=−
+ −= = −
− −
2
3(s s 6)k
(s 1)(s 1) (s 2)− −
=− + −
(s 2)−s 2
4 2 6 4(1)(3) 3
=
− −= = −
Συνεπώς,
t t 2t2 4y(t) 3e e e3 3
−= − −

ΠΑΡΑΡΤΗΜΑ Α: Μετασχηματισμοί Laplace 453 Η επαλήθευση του τελευταίου αποτελέσματος μπορεί να γίνει με τη βοήθεια του παραπάνω προγράμματος σε MatLab.
Μιγαδικές ρίζες: Εάν το πολυώνυμο του παρονομαστή της Y(s) (βλέπε εξίσωση (A.36)) έχει ένα ζευγάρι συζυγών μιγαδικών ριζών, (π.χ., p1 και p2), τότε η Y(s) αναλύεται ως εξής:
31 2 n
1 2 3 n
kk s k kb(s)Y(s) ...a(s) (s p )(s p ) (s p ) (s p )
+= = + + +
− − − − (A.41)
Ο υπολογισμός των k1και k2 μπορεί να γίνει από την ακόλουθη σχέση:
11
1 2 1 2 s ps p
b(s) (s p )(s p ) (k s k )a(s) =
=
− − = + (A.42)
Θεωρούμε τώρα το ζεύγος των συζυγών μιγαδικών ριζών 1p α βi= − + και 2p α βi= − − .
Συνεπώς, η συνεισφορά των ριζών p1 και p2 στη χρονική απόκριση της y(t) θα είναι :
1 2 1 2 1 22 2
1 2
k s k k s k k s k(s p )(s p ) [s ( α βi)][s ( α βi)] (s α) β
+ + += =
− − − − + − − − + +
1 1 2 1 2 12 2 2 2 2 2
k (s α) k α k k (s α) k k α(s α) β (s α) β (s α) β+ − + + −
= = ++ + + + + +
(A.43)
Ακολούθως, με τη βοήθεια του Πίνακα Α.1, υπολογίζουμε τον αντίστροφο μετασχηματισμό Laplace του τελευταίου αθροίσματος.
1 2 2 11 αt αt1
1 2
k s k k k αL k e cos(βt) e sin(βt)(s p )(s p ) β
− − −⎧ ⎫+ −= +⎨ ⎬− −⎩ ⎭
(A.44)
Παράδειγμα Α.6: Υπολογισμός του L-1Y(s): Περίπτωση συζυγών μιγαδικών ριζών
Να υπολογίσετε τον αντίστροφο μετασχηματισμό Laplace της ακόλουθης συνάρτησης:
2
s 1Y(s)s 2s 5
+=
− +
Λύση:
Οι ρίζες του πολυωνύμου του παρονομαστή είναι 1p 1 2i= + , 2p 1 2i= − . Στην περίπτωση

454 Δυναμική Ανάλυση των Συστημάτων αυτή, -α = 1 και β = Α. Ακολούθως, από την εφαρμογή της εξίσωσης (A.42), υπολογίζουμε τους συντελεστές k1 και kΑ.
2
s 1(s 2s 5)
+− + 1 2(s p )(s p )− −
1
1
1 2 s ps p
k s k=
=
= +
Άρα, k1 = 1 και k2 = 1. Αντικαθιστώντας τις τιμές των k1, k2, -α και β στην εξίσωση (A.44) λαμβάνουμε:
t ty(t) e cos(2t) e sin(2t)= +
Εναλλακτικά, η μετασχηματισμένη συνάρτηση Y(s) γράφεται:
s 1Y(s)[s (1 2i)][s (1 2i)]
+=
− + − −
και σύμφωνα με την εξίσωση (A.39) λαμβάνουμε:
(1 2i)t (1 2i)t1 2y(t) k e k e+ −= +
Ακολούθως, από την εφαρμογή της εξίσωσης (A.40) υπολογίζουμε τους συντελεστές k1 και kΑ.
1s 1 2i
s 1 2 2i 2(1 i) 1 i i 1i 1 1 ik(s (1 2i)) 1 2i 1 2i 4i 2i i 2 2= +
+ + + + − −= = = = × = =
− − + − + −
Παρόμοια, υπολογίζεται η τιμή του συντελεστή k2,
2s 1 2i
s 1 1 ik(s (1 2i)) 2= −
+ += =
− +
Συνεπώς,
t(1 2i)t (1 2i)t 2it 2it1 i 1 i ey(t) e e ((1 i)e (1 i)e )
2 2 2+ − −− +
= + = − + +
Σύμφωνα με την ταυτότητα του Euler θα ισχύει:
iαe cosα i sinα= +
Τελικά, η χρονική συνάρτηση y(t) γράφεται:

ΠΑΡΑΡΤΗΜΑ Α: Μετασχηματισμοί Laplace 455
t ty(t) e (cos 2t sin 2t) e 2 sin(2t φ)= + = + , ( )1 oφ tan 1 45−= =
Παρατήρηση: Στην παραπάνω εξίσωση χρησιμοποιήθηκε η τριγωνομετρική ταυτότητα:
1 2α cos b α sin b αsin(b φ)+ = + ; 2 2 1 21 2α (α α )= + ; 1
1 2φ tan (α / α )−=
Η επαλήθευση του αποτελέσματος μπορεί να γίνει με τη βοήθεια του ακόλουθου προγράμματος σε MatLab.
Επαναλαμβανόμενες ρίζες: Στην περίπτωση που το πολυώνυμο a(s) έχει μία επαναλαμβανόμενη ρίζα τάξης r, τότε οι συντελεστές k1, k2, … kr υπολογίζονται ως εξής:
r r 1 1 n 1 nr r 1
1 1 1 n 1 n
k k k k kb(s)Y(s) ... ...a(s) (s p ) (s p ) (s p ) (s p ) (s p )
− −−
−
= = + + + + + +− − − − −
(A.45)
rr 1
s p1
b(s)k (s p )a(s)
=
= − (A.46)
rr 1 1
s p1
d b(s)k (s p )ds a(s)−
=
⎧ ⎫⎛ ⎞= −⎨ ⎬⎜ ⎟
⎝ ⎠⎩ ⎭ (A.47)
r 1r
1 1r 1s p1
1 d b(s)k (s p )(r 1)! ds a(s)
−
−=
⎧ ⎫⎧ ⎫= −⎨ ⎨ ⎬⎬− ⎩ ⎭⎩ ⎭
(A.48)
Από τον Πίνακα Α.1, εύκολα υπολογίζεται ο αντίστροφος μετασχηματισμός Laplace του όρου 1/(s – p1)n,

456 Δυναμική Ανάλυση των Συστημάτων
1n 1
p t1n
1
1 tL e(n 1)!(s p )
−− ⎧ ⎫
=⎨ ⎬ −−⎩ ⎭ (A.49)
Παράδειγμα Α.7: Υπολογισμός του L-1Y(s): Επαναλαμβανόμενες ρίζες
Να υπολογισθεί ο αντίστροφος μετασχηματισμός Laplace της
2
3
s 2s 3Y(s)(s 1)+ +
=+
Λύση:
Σύμφωνα με τα ανωτέρω, η Υ(s) γράφεται:
3 2 13 2
k k kY(s)(s 1) (s 1) (s 1)
= + ++ + +
Υπολογισμός των k1, k2, k3:
2
3 3
s 2s 3k(s 1)+ +
=+
3(s 1)+ 2s 1
s 1
s 2s 3 1 2 3 2=−
=−
⎛ ⎞⎜ ⎟ = + + = − + =⎜ ⎟⎝ ⎠
2
2 3
d (s 2s 3)kds (s 1)
+ +=
+3(s 1)+ s 1
s 1
2s 2 0=−
=−
⎛ ⎞= + =⎜ ⎟⎜ ⎟
⎝ ⎠
2 2
1 2 3
1 d (s 2s 3)k(3 1)! ds (s 1)
+ +=
− +3(s 1)+
s 1
1 2 12
=−
⎡ ⎤⎛ ⎞⎢ ⎥ = ⋅ =⎜ ⎟⎜ ⎟⎢ ⎥⎝ ⎠⎣ ⎦
Άρα,
y(t) = 2
1 1 1 t t 2 t3
2 1 tL Y(s) L L 2e e (t 1)e(s 1) s 1 2!
− − − − − −⎧ ⎫ ⎧ ⎫= + = + = +⎨ ⎬ ⎨ ⎬+ +⎩ ⎭⎩ ⎭
Η επαλήθευση του τελευταίου αποτελέσματος μπορεί να γίνει με τη βοήθεια του ακόλουθου προγράμματος σε MatLab.

ΠΑΡΑΡΤΗΜΑ Α: Μετασχηματισμοί Laplace 457
A.3.2 Θεώρημα Συνέλιξης
Πολλές φορές, μια συνάρτηση F(s) μπορεί να γραφεί ισοδύναμα ως γινόμενο δύο συναρτήσεων, δηλαδή των G(s) και H(s).
F(s) = G(s)H(s) (A.50)
Εάν οι αντίστροφοι μετασχηματισμοί Laplace των G(s) και Η(s) είναι g(t) και h(t) αντίστοιχα, τότε ο αντίστροφος μετασχηματισμός Laplace της F(s), δηλαδή η f(t), δύναται να υπολογισθεί με τη βοήθεια του ολοκληρώματος της συνέλιξης:
f(t) = L-1F (s) = L-1G(s)H(s) = t t
0 0
g(τ)h(t τ)dτ g(t τ)h(τ)dτ− = −∫ ∫ (A.51)
Οι δύο παραπάνω ισοδυναμες διατυπώσεις του θεωρήματος υποδηλώνουν ότι το ολοκλήρωμα της συνέλιξης είναι συμμετρικό.
Παράδειγμα Α.8: Εφαρμογή του θεωρήματος συνέλιξης
Με τη βοήθεια του θεωρήματος συνέλιξης να υπολογίσετε τον αντίστροφο μετασχηματισμό Laplace της F(s):
2 21 1F(s)s (s 1)
=+
Λύση:
Θεωρούμε ότι G(s) = 1/(s2) και H(s) = 1/(s+1)Α. Σύμφωνα με τον Πίνακα Α.1, οι αντίστροφοι μετασχηματισμοί Laplace των G(s) και H(s) είναι:

458 Δυναμική Ανάλυση των Συστημάτων
g(t) = L-11/s2 = t ; h(t) = L-11/(s+1)2 = te–t
Συνεπώς, σύμφωνα με την εξίσωση (A.51) έχουμε:
f(t) = t
(t τ)
0
τ(t τ)e dτ− −−∫ = te– t t t
τ t 2 τ
0 0
τe dτ e τ e dτ−−∫ ∫
= t t tt τ t 2 τ τ0 0 0
te e (τ 1) e τ e 2e (τ 1)− −⎡ ⎤ ⎡ ⎤− − − −⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦= (t – 2) + (t + 2)e –t
Α.4 Θεώρημα Heaviside
Θεωρούμε τη ρητή συνάρτηση Laplace, Y(s):
b(s)Y(s)a(s)
= (A.52)
όπου τα b(s) και a(s) είναι πολυώνυμα του s. Η τάξη του πολυωνύμου a(s) είναι μεγαλύτερη εκείνης του πολυωνύμου b(s). Eπιθυμούμε να υπολογίσουμε τον αντίστροφο μετασχηματισμό Laplace της Y(s). Διακρίνουμε τρεις περιπτώσεις:
Πραγματικές διακεκριμένες ρίζες: Στην περίπτωση αυτή, η Y(s) γράφεται υπό τη μορφή,
i i
b(s) b(s)Y(s)a(s) a (s)(s p )
= =−
(A.53)
όπου ia (s) είναι το πηλίκο a(s) / (s-pi). Η συνεισφορά της ρίζας pi στη συνολική χρονική
απόκριση της y(t) θα είναι:
ii
i
p tp
i s p
b(s)y (t) ea (s) =
= ή ii
i
i p tp
s p
b(p )y (t) eda(s) / ds =
= (A.54)
Επαναλαμβανόμενη ρίζα πολλαπλότητας r: Στην περίπτωση αυτή, η Y(s) γράφεται:
r ri i i
b(s) b(s) φ(s)Y(s)a(s) a (s)(s p ) (s p )
= = =− −
(A.55)
Η συνεισφορά της ρίζας pi πολλαπλότητας r στη y(t) θα είναι:

ΠΑΡΑΡΤΗΜΑ Α: Μετασχηματισμοί Laplace 459
ii
ii i
r 1 r 1 r 2 r 2 r 2 r 1p t
p ipp p
d φ / ds d φ / ds t dφ / ds t ty (t) φ(p ) e(r 1)! (r 2)! 1! 1! (r 2)! (r 1)!
− − − − − −⎡ ⎤⎢ ⎥= + + + +
− − − −⎢ ⎥⎣ ⎦
i
i
r r j r j ( j 1)p t
j 1 p
d φ / ds te(r j)! ( j 1)!
− − −
=
⎡ ⎤⎢ ⎥=
− −⎢ ⎥⎣ ⎦∑ (A.56)
Μιγαδικές ρίζες: Για συζυγείς μιγαδικές ρίζες α iβ− ± (όπου β είναι ένας θετικός
πραγματικός αριθμός), ο τετραγωνικός όρος 2 2[(s α) β ]+ + εμφανίζεται στον
παρονομαστή της Y(s), δηλαδή
2 2 2 2i
b(s) b(s) ψ(s)Y(s)a(s) a (s)[(s α) β ] (s α) β
= = =+ + + +
(A.57)
Η συνεισφορά των μιγαδικών ριζών α β− ± στη y(t) θα δίνεται από την εξίσωση (A.58):
αt
α iβ i rey (t) (ψ cosβt ψ sinβt)β
−
− ± = + (A.58)
όπου ψr και ψi είναι το πραγματικό και το μιγαδικό μέρος της ψ(s) για s =-α+iβ.
Παράδειγμα Α.9: Εφαρμογή του θεωρήματος Heaviside
Άσκηση 1: Να υπολογισθεί ο αντίστροφος μετασχηματισμός Laplace της συνάρτησης:
2
s 5Y(s)s 5s 4
+=
+ +
Λύση:
Όλες οι ρίζες του πολυωνύμου a(s) είναι πραγματικές και διακεκριμένες.
1 2k ks 5Y(s)(s 1)(s 4) s 1 s 4
+= = +
+ + + +
Συνεπώς,
1s 1
s 5 1 5 4ks 4 1 4 3=−
+ − += = =
+ − + ; 2
s 4
s 5 4 5 1ks 1 4 1 3=−
+ − += = = −
+ − +
t 4t4 1y(t) e e3 3
− −= −

460 Δυναμική Ανάλυση των Συστημάτων Η επαλήθευση του τελευταίου αποτελέσματος μπορεί να γίνει με τη βοήθεια προγράμματος σε MatLab.
Άσκηση 2: Να υπολογισθεί ο αντίστροφος μετασχηματισμός Laplace της συνάρτησης:
2 2
s 1Y(s)s (s 4s 5)
+=
+ +
Λύση:
Το πολυώνυμο a(s) έχει μία ρίζα με πολλαπλότητα δύο (p1 = p2 = 0) και ένα ζευγάρι συζυγών μιγαδικών ριζών (p3 = – 2 + i, p4 = – 2 – i). Συνεπώς, η Y(s) αναλύεται στους ακόλουθους όρους:
32 1 42 2 2
3 4
kk k ks 1Y(s)s (s 4s 5) s s (s p ) (s p )
+= = + + +
+ + − −
όπου,
2 s 0 2
s 1k φ(s)s=
+= = 2
2s
(s 4s 5)+ + s 0
1 1 0, 20 0 5 5
=
= = =+ +
1 2s 0 s 0
1 dφ(s) d s 1k 0,041! ds ds (s 4s 5)= =
⎛ ⎞+= = =⎜ ⎟+ +⎝ ⎠
2 2
s 1ψ(s)s (s 4s 5)
+=
+ + 3 4(s p )(s p )− −2
s 1s+⎛ ⎞= ⎜ ⎟
⎝ ⎠ και α=2, β=1
Συνεπώς, η συνεισφορά του ζεύγους των μιγαδικών ριζών στη y(t) θα δίνεται από την ακόλουθη σχέση:

ΠΑΡΑΡΤΗΜΑ Α: Μετασχηματισμοί Laplace 461
2t
a ib i rey (t) (ψ cos t ψ sin t)
1
−
− + = +
όπου ψr και ψi είναι το πραγματικό και μιγαδικό μέρος της ψ(s).
2 i 22 i
s 1 2 i 1 i 1 (i 1)(3 4i) 7 iψ(s)4 1 4i 3 4i (3 4i)(3 4i) 25s− +
− +
+ − + + − − + − −= = = = =
− − − − +
r7ψ 0,2825
= − = − ; i1ψ 0,0425
= − = −
Συνεπώς, με βάση τα παραπάνω αποτελέσματα, η y(t) είναι:
tsine28,0tcose04,0t2,004,0)t(y t2t2 −− −−+=
Η επαλήθευση του τελευταίου αποτελέσματος μπορεί να γίνει με τη βοήθεια προγράμματος σε MatLab.
Άσκηση 3: Να υπολογισθεί ο αντίστροφος μετασχηματισμός Laplace της συνάρτησης:
3 2
1Y(s)s(s 6s 11s 6)
=+ + +
Λύση:
Όλες οι ρίζες του πολυωνύμου του παρονομαστή της Y(s) είναι πραγματικές και διακεκριμένες.
31 2 4kk k k1Y(s)s(s 1)(s 2)(s 3) s s 1 s 2 s 3
= = + + ++ + + + + +

462 Δυναμική Ανάλυση των Συστημάτων Σύμφωνα με την εξίσωση (A.54) υπολογίζουμε τους συντελεστές k1, k2, k3 και k4.
1s 0
1 1k(s 1)(s 2)(s 3) 6=
= =+ + +
2s 1
1 1 1ks(s 2)(s 3) ( 1)(1)(2) 2=−
= = = −+ + −
3s 2
1 1 1ks(s 1)(s 3) ( 2)( 1)(2) 2=−
= = =+ + − −
4s 3
1 1 1ks(s 1)(s 2) ( 3)( 2)( 1) 6=−
= = = −+ + − − −
Συνεπώς,
t 2t 3t1 1 1 1y(t) e e e6 2 2 6
− − −= − + −
Η επαλήθευση του τελευταίου αποτελέσματος μπορεί να γίνει με τη βοήθεια του παραπάνω προγράμματος σε MatLab.
Άσκηση 4: Να λυθεί η διαφορική εξίσωση:
dy5 4y 2H(t)dt
+ = , y(0) = 1
Λύση:
Λαμβάνοντας το μετασχηματισμό Laplace της διαφορικής εξίσωσης, προκύπτει:

ΠΑΡΑΡΤΗΜΑ Α: Μετασχηματισμοί Laplace 463
25sY(s) 5y(0) 4Y(s)s
− + = ⇒
1 2k k5s 2 5s 2Y(s)s(5s 4) 5s(s 0,8) s s 0,8
+ += = = +
+ + +
1s 0
5s 2 1k 0,55(s 0,8) 2=
+= = =
+ ; 5,0
s52s5k
8,0s2 =
+=
−=
Συνεπώς,
0,8ty(t) 0,5(1 e )−= +
Η επαλήθευση του τελευταίου αποτελέσματος μπορεί να γίνει με τη βοήθεια του ακόλουθου προγράμματος σε MatLab.
Άσκηση 5: Να υπολογισθεί ο αντίστροφος μετασχηματισμός Laplace της συνάρτησης:
2
3Y(s)s 3s 6
=+ +
Λύση:
Το πολυώνυμο του παρονομαστή έχει ένα ζεύγος συζυγών μιγαδικών ριζών, 1,5± i 15 /2.
( )22 2 22
3 3 ψ(s)Y(s)s 3s 6 (s α) β(s 1,5) 0,5 15
= = =+ + + ++ +
όπου α 1,5= , β 0,5 15= . Επειδή ψ(s) = 3, προκύπτει ότι ψr = 3 και ψi = 0. Συνεπώς,
σύμφωνα με την εξίσωση (A.58), λαμβάνουμε:

464 Δυναμική Ανάλυση των Συστημάτων
1,5t 1,5t
i r2e 6ey(t) (ψ cos(0,5 15t) ψ sin(0,5 15t)) sin(0,5 15)
15 15
− −
= + =
Η επαλήθευση του τελευταίου αποτελέσματος μπορεί να γίνει με τη βοήθεια του ακόλουθου προγράμματος σε MatLab.
Άσκηση 6: Να βρεθεί ο αντίστροφος μετασχηματισμός Laplace της συνάρτησης:
3
10Y(s)(s 4)(s 2)
=+ +
Λύση:
Η a(s) έχει μία ρίζα με πολλαπλότητα ένα και μία ρίζα με πολλαπλότητα τρία.
3 2 1 43 3 2
k k k k10Y(s)(s 4)(s 2) (s 2) (s 2) s 2 s 4
= = + + ++ + + + + +
3 s 2s 2
10k φ(s) 5s 4=−
== = =
+ ; 2
s 2 s 2
1 dφ(s) d 10 5k1! ds ds s 4 2=− =−
⎛ ⎞= = = −⎜ ⎟+⎝ ⎠
2 2
1 2 2s 2 s 2
1 d φ(s) 1 d 10 5k2! 2! s 4 4ds ds=− =−
⎛ ⎞= = =⎜ ⎟+⎝ ⎠ ; 4 3
s 4
10 5k4(s 2) =−
= = −+

ΠΑΡΑΡΤΗΜΑ Α: Μετασχηματισμοί Laplace 465 Συνεπώς, σύμφωνα με τις εξισώσεις (A.54) και (A.56) λαμβάνουμε:
2 2t 2t 2t 4t5 5 5 5y(t) t e te e e2 2 4 4
− − − −= − + −
Η επαλήθευση του τελευταίου αποτελέσματος μπορεί να γίνει με τη βοήθεια του ακόλουθου προγράμματος σε MatLab.
Άσκηση 7: Να υπολογισθεί ο αντίστροφος μετασχηματισμός Laplace της συνάρτησης:
2
3 2
s 9s 19Y(s)s 7s 14s 8
+ +=
+ + +
Λύση:
Όλες οι ρίζες είναι πραγματικές και διακεκριμένες. Επομένως,
2 231 2
3 2
kk ks 9s 19 s 9s 19Y(s)s 7s 14s 8 (s 1)(s 2)(s 4) s 1 s 2 s 4
+ + + += = = + +
+ + + + + + + + +
2
1s 1
s 9s 19 1 9 19 11k(s 2)(s 4) 3 3=−
+ + − += = =
+ +
2
2s 2
s 9s 19 5k(s 1)(s 4) 2=−
+ += = −
+ + ;
2
3s 4
s 9s 19 1k(s 1)(s 2) 6=−
+ += = −
+ +
Συνεπώς,
t 2t 4t11 5 1y(t) e e e3 2 6
− − −= − −

466 Δυναμική Ανάλυση των Συστημάτων Η επαλήθευση του τελευταίου αποτελέσματος μπορεί να γίνει με τη βοήθεια προγράμματος σε MatLab.
Άσκηση 8: Να υπολογισθεί ο αντίστροφος μετασχηματισμός Laplace της συνάρτησης:
0,5s
2 s
2e s 1Y(s)s 6s 13 s 2s 2
− −= −
− + − +
Λύση:
Η Υ(s) γράφεται,
0,5s
2 2 2 2
2e s 1Υ(s)(s 3) 2 (s 1) 1
− −= −
− + − +
Σύμφωνα με τον Πίνακα Α.1, έχουμε:
1 3t2 2
2L sin(2t)e(s 3) 2
− ⎧ ⎫=⎨ ⎬
− +⎩ ⎭ και 1 t
2 2s 1L cos(t)e
(s 1) 2− ⎧ ⎫−
=⎨ ⎬− +⎩ ⎭
Από την εφαρμογή του θεωρήματος της χρονικής μετατόπισης συνάρτησης, λαμβάνουμε:
)5,0t(He))5,0t(2sin(2)3s(
e2L )5,0t(322
s5,01 −−=
⎭⎬⎫
⎩⎨⎧
+−−
−−
και τελικά,
3(t 0.5) ty(t) sin(2(t 0,5))e H(t 0,5) cos(t)e−= − − −
Η επαλήθευση του τελευταίου αποτελέσματος μπορεί να γίνει με τη βοήθεια προγράμματος σε MatLab.

ΠΑΡΑΡΤΗΜΑ Α: Μετασχηματισμοί Laplace 467
Άσκηση 9: Να λυθεί η διαφορική εξίσωση:
2
2d y dy dx4 4y 3 2x
dt dtdt+ + = + ; y(0)=0, y΄(0)=0 και x(t)=e–3t
Λύση:
Η πρώτη παράγωγος της συνάρτησης x(t) είναι: 3tdx(t) / dt 3e−= −
Ακολούθως, λαμβάνοντας το μετασχηματισμό Laplace της διαφορικής εξίσωσης, προκύπτει:
2 7s Y(s) 4sY(s) 4Y(s)s 3−
+ + = ⇒+
32 12 2
kk k7Y(s)(s 3)(s 2) (s 2) s 2 s 3
−= = + +
+ + + + +
2s 2
7k 7s 3 =−
−= = −
+ ; 1
s 2
d 7k 7ds (s 3) =−
−⎛ ⎞= =⎜ ⎟+⎝ ⎠ ; 3 2
s 3
7k 7(s 2) =−
−= = −
+
Συνεπώς,
2t 2t 3ty(t) 7te 7e 7e− − −= − + −
Η επαλήθευση του τελευταίου αποτελέσματος μπορεί να γίνει με τη βοήθεια προγράμματος σε MatLab.

468 Δυναμική Ανάλυση των Συστημάτων
Άσκηση 10: Να λυθεί η διαφορική εξίσωση:
)t(Hy2dtdy3
dtyd2
2=++ ; y(0)=0, y΄(0)=0
Λύση:
Λαμβάνοντας το μετασχηματισμό Laplace της διαφορικής εξίσωσης, προκύπτει:
2 1s Y(s) 3sY(s) 2Y(s)s
+ + =
31 22
kk k1 1Y(s)s(s 3s 2) s(s 1)(s 2) s s 1 s 2
= = = + ++ + + + + +
1s 0
1 1k(s 1)(s 2) 2=
= =+ +
; 2s 1
1 1k 1s(s 2) ( 1)(1)=−
= = = −+ −
; 1s 2
1 1ks(s 1) 2=−
= =+
Συνεπώς,
t 2t1 1y(t) e e2 2
− −= − +
Η επαλήθευση του τελευταίου αποτελέσματος μπορεί να γίνει με τη βοήθεια προγράμματος σε MatLab.

ΠΑΡΑΡΤΗΜΑ Α: Μετασχηματισμοί Laplace 469
Άσκηση 11: Να λυθεί η διαφορική εξίσωση:
3
3d y dy 0
dtdt+ = ; y(0) = y΄(0) = 0, y΄΄(0) = 1
Λύση:
Λαμβάνοντας το μετασχηματισμό Laplace της διαφορικής εξίσωσης, προκύπτει:
32
1s Y(s) sY(s) 1 Y(s)s(s 1)
+ = ⇒ =+
Το πολυώνυμο του παρονομαστή έχει μια πραγματική ρίζα στη θέση s = 0 και ένα ζεύγος συζυγών μιγαδικών ριζών, 0 ± i1. Άρα,
y(t) = yo(t) + y-0±li(t)
0to 2
s 0
1y (t) e 1s 1
−
=
= =+
0ti i ry (t) e [ψ cos t ψ sin t]± = +
όπου ψ(s) = 1/s και ψ(i) = 1/i = – i ⇒ ψr = 0, ψi = - 1.
Συνεπώς, y(t) = 1 – cost
Άσκηση 12: Να υπολογισθεί ο αντίστροφος μετασχηματισμός Laplace της συνάρτησης:
3 2s s 9s 7Y(s)(s 1)(s 2)+ + +
=+ +

470 Δυναμική Ανάλυση των Συστημάτων Λύση:
Διαιρώντας τον αριθμητή με τον παρονομαστή λαμβάνουμε:
1 2k ks 3Y(s) s 2 s 2(s 1)(s 2) s 1 s 2
+= + + = + + +
+ + + +
όπου
1s 1
(s 3)(s 1)k 2(s 1)(s 2) =−
+ += =
+ + ; 2
s 2
(s 3)(s 2)k 1(s 1)(s 2) =−
+ += = −
+ +
Ο μετασχηματισμός Laplace της δ(t) είναι 1, ενώ της dδ(t)/dt είναι s. Επομένως, ο αντίστροφος μετασχηματισμός Laplace της Y(s) είναι:
t 2tdy(t) δ(t) 2δ(t) 2e edt
− −= + + −

ΠΑΡΑΡΤΗΜΑ Α: Μετασχηματισμοί Laplace 471
Τι πρέπει να γνωρίζω
Τι είναι μετασχηματισμός Laplace;
Ποιες κατηγορίες διαφορικών εξισώσεων επιλύονται με τη βοήθεια του μετασχηματισμού Laplace;
Ποια είναι η ιδιότητα της γραμμικότητας;
Ποιος είναι ο μετασχηματισμός Laplace της παραγώγου n-τάξης, dnf/dtn;
Ποιος είναι ο μετασχηματισμός Laplace της χρονικά μετατοπισμένης συνάρτησης f(t – T);
Ποιο είναι το θεώρημα της αρχικής τιμής;
Ποιο είναι το θεώρημα της τελικής τιμής;
Ποιος είναι ο μετασχηματισμός Laplace βηματικής συνάρτησης μεγέθους α;
Ποιος είναι ο μετασχηματισμός Laplace της μοναδιαίας συνάρτησης πύλης;
Ποιος είναι ο μετασχηματισμός Laplace της συνάρτησης Dirac, δ(t);
Ποιος είναι ο μετασχηματισμός Laplace της επικλινούς συνάρτησης f(t) = αt;
Ποιος είναι ο μετασχηματισμός Laplace της εκθετικής συνάρτησης f(t) = e-αt;
Ποιος είναι ο μετασχηματισμός Laplace της ημιτονοειδούς (αsinωt) και συνημιτονοειδούς συνάρτησης (αcosωt);
Πως υπολογίζεται ο αντίστροφος μετασχηματισμός Laplace της ρητής συνάρτησης Y(s) για τις περιπτώσεις (i) διακεκριμένων πραγματικών ριζών, (ii) επαναλαμβανόμενων ριζών και (iii) συζυγών μιγαδικών ριζών;
Διατυπώστε το θεώρημα της συνέλιξης.
Διατυπώστε το θεώρημα Heaviside για διακεκριμένες πραγματικές ρίζες, επαναλαμβανόμενες και συζυγείς μιγαδικές.

472 Δυναμική Ανάλυση των Συστημάτων Ασκήσεις
Άσκηση A.1: Να βρεθεί ο μετασχηματισμός Laplace των παρακάτω περιοδικών συναρτήσεων:
Άσκηση Α.2: Να βρεθεί ο μετασχηματισμός Laplace της συνάρτησης:
t 4 (t 10)f (t) 2e cos10t t 6e− − −= − + για t >0
Άσκηση Α.3: Να αποδείξετε ότι ο αντίστροφος μετασχηματισμός Laplace της F(s),
2 21F(s)
s (s 1)=
+
είναι: f(t) = t – 2 + (2 + t)e –t με τη βοήθεια του θεωρήματος Heaviside.

ΠΑΡΑΡΤΗΜΑ Α: Μετασχηματισμοί Laplace 473 Άσκηση Α.4: Να αποδείξετε ότι ο αντίστροφος μετασχηματισμός Laplace της F(s),
1F(s)(s a)(s b)
=+ +
είναι: f(t) = 1(b a)−
e –at + 1(a b)−
e –bt
Άσκηση Α.5: Να αποδείξετε ότι ο αντίστροφος μετασχηματισμός Laplace της F(s),
2
22s 3s 4F(s)
(s 2)(s 2s 2)+ −
=− + +
είναι: f(t) = e2t + e–tcos(t) + 2e –t sin(t)
Άσκηση Α.6: α) Με τη βοήθεια του ολοκληρώματος συνέλιξης να δείξετε ότι ο αντί-
στροφος μετασχηματισμός Laplace της συνάρτησης F(s)Y(s)1 G(s)
=−
, δίνεται από το
ολοκλήρωμα του Volterra,
y(t) = f(t) + t
0
y(u)g(t u)du−∫ .
β) Με βάση την απόδειξη του ερωτήματος (α) να δείξετε ότι η λύση του ολοκληρώματος Volterra
y(t) = sin(t) + t
0
sin[2(t u)]y(u)du−∫
είναι: y(t) = 3sin(t) – 2 sin( 2 t)
Άσκηση Α.7: Να δείξετε ότι ο αντίστροφος μετασχηματισμός Laplace των συναρτήσεων:
α) 31
s(s 1)+ ; β) 2 2
s(s 1)(s 4)+ +
είναι: (α) f(t) = 1 – e–t(t+1) – 12
t2e –t και (β) f(t) = 13
[cos(t) – cos(2t)]

474 Δυναμική Ανάλυση των Συστημάτων Άσκηση Α.8: Να υπολογίσετε την αρχική και τελική τιμή της y(t) από την ακόλουθη μετασχηματισμένη συνάρτηση, Y(s):
3 2
3 2
s 4s 5Y(s)s (s s 1)
− +=
+ +
Άσκηση Α.9: Να βρεθεί ο αντίστροφος μετασχηματισμός Laplace των συναρτήσεων:
α) 1(s 1)(s 2)(s 3)+ + +
; β) 2
1(s a)(s b)+ +
; γ) 2
s 1s(s 4)
++
δ) 2 2 2
1[(s a) b ]+ +
; ε) s
2
es 1
−
+ ; στ)
sTes
−
Άσκηση Α.10: Να βρεθεί ο αντίστροφος μετασχηματισμός Laplace των συναρτήσεων:
α) Y(s) = 2
20(s 10)(s 2s 2)+ + +
; β) Y(s) = 2
2
(s s 1)s(s 3s 2)
+ −+ +
γ) Y(s) = 2
s 3 1s 3s 2 s 4
+⎛ ⎞⎛ ⎞⎜ ⎟⎜ ⎟+ + +⎝ ⎠⎝ ⎠
Άσκηση Α.11: Να επιλύσετε τις παρακάτω διαφορικές εξισώσεις με τη βοήθεια του μετασχηματισμού Laplace:
α) 3 2
3 2
d y d y dy3 3 y H(t)dt dt dt
+ + + = ; y(0) y (0) y (0) 0′ ′′= = =
β) 2
t2
d y dy3 2y edt dt
−− + = ; y (0) 1′ = − , y(0) 2=
γ) 3 2 2
3 2 2
d y d y dy d x3 6y xdt dt dt dt
+ − + = − ; y(0) y (0) 0′= = , y (0) 1′′ = όπου x(t) 5sin t= .
Άσκηση Α.12: α) Να αποδείξετε ότι η 1 β 1 βy(t) AL (1 s) s− += − είναι λύση της εξίσωσης
Kummer:

ΠΑΡΑΡΤΗΜΑ Α: Μετασχηματισμοί Laplace 475
2
2
d y dyt (1 t) βy 0dt dt
+ − + =
όπου Α και β είναι κάποιες σταθερές.
β) Να δείξετε ότι στην περίπτωση που β = 1
y(t) = A(t – 1)
και για την περίπτωση που β = 2
y(t) = A2t1 2t
2!⎛ ⎞− +⎜ ⎟
⎝ ⎠
Άσκηση Α.13: (Θέμα εξετάσεων – Απρίλιος 2006) Με τη βοήθεια των μετασχηματισμών Laplace να επιλύσετε τις παρακάτω διαφορικές εξισώσεις:
α) 2
2d y dy3 2y sin t
dtdt+ + = , y(0) 0= και y (0) 0′ =
β) 3 2
t3 2
d y d y dy4 4y edtdt dt
−+ + + = , y(0) 0= , y (0) 0′ = και y (0) 0′′ =

497
ΠΑΡΑΡΤΗΜΑ Γ
Εισαγωγή στο MATLAB
Γ.1 Eισαγωγή
Γ.1.1 Τι είναι το Πρόγραμμα MATLAB
Το πρόγραμμα MATLAB αποτελεί ένα τεχνικό υπολογιστικό περιβάλλον μέσω του οποίου μπορούν να επιλυθούν υψηλού επιπέδου μαθηματικά προβλήματα αριθμητικής ανάλυσης, υπολογισμού πινάκων, επεξεργασίας σήματος και πλήθος άλλων εφαρμογών παρέχοντας τη δυνατότητα οπτικοποίηση των αποτελεσμάτων. Η ονομασία του προγράμματος MATLAB προέρχεται από τη σύνθεση των λέξεων “Matrix Laboratory” καθώς το πρόγραμμα αρχικά σχεδιάστηκε ώστε να διευκολύνει τους υπολογισμούς μεταξύ πινάκων, με την ουσιαστική διαφοροποίηση από τις υπόλοιπες γλώσσες προγραμματισμού να μην απαιτεί εκ των προτέρων διαστασιολόγησή τους.
Το πρόγραμμα MATLAB είναι ιδιαίτερα διαδεδομένο και βρίσκει εφαρμογή τόσο στα πανεπιστήμια σε προπτυχιακό επίπεδο με καθαρά διδακτικό σκοπό, καθώς και σε μεταπτυχιακό επίπεδο για ερευνητικούς σκοπούς, όσο και στις βιομηχανίες για την επίλυση προβλημάτων μηχανικής. Βασικό πλεονέκτημά του αποτελεί η εύκολη χρήση και η μεγάλη επεκτασιμότητα αφενός από το ίδιο το πρόγραμμα MATLAB που εξελίσσεται διαρκώς παρουσιάζοντας ανανεωμένες εκδόσεις, αφετέρου δε από τους χρήστες του προγράμματος που μπορούν να προσθέσουν εξειδικευμένες ρουτίνες για τα επιμέρους προβλήματα που μελετούν. Μεγάλο ενδιαφέρον παρουσιάζουν οι επιπρόσθετες συλλογές συναρτήσεων που προσαρτώνται στο κυρίως πρόγραμμα και αφορούν στα εξειδικευμένα πεδία επιστημών, επεκτείνοντας τις δυνατότητες του προγράμματος MATLAB. Οι συλλογές αυτές καλούνται από το πρόγραμμα “toolboxes” (εργαλειοθήκες) και καλύπτουν πλήθος εφαρμογών.

498 Δυναμική Ανάλυση των Συστημάτων Γ.1.2 Ξεκινώντας το Πρόγραμμα MATLAB
Αφού ολοκληρωθεί η εγκατάσταση του προγράμματος, το MATLAB ξεκινάει μέσω του αρχείου “MATLAB.exe” που βρίσκεται στο φάκελο όπου εγκαταστάθηκε το πρόγραμμα MATLAB ή μέσω της συντόμευσης του αρχείου που δημιουργήθηκε στο περιβάλλον εργασίας μετά την εγκατάσταση. Το γραφικό περιβάλλον του προγράμματος MATLAB είναι πλήρως συμβατό με το πρότυπο των Windows-based προγραμμάτων.
Το περιβάλλον εργασίας του προγράμματος MATLAB αποτελείται από τρία εσωτερικά παράθυρα εντός της κλασικής δομής των προγραμμάτων Windows με το χαρακτηριστικό
Εικόνα Γ.1: Το περιβάλλον εργασίας του προγράμματος MATLAB®.

Εισαγωγή στο MATLAB 499 μενού επιλογών (File, Edit κλπ). Το πλήκτρο “Start” που διακρίνεται στην κάτω αριστερή γωνία του παραθύρου παρέχει την εύκολη πλοήγηση στα “toolboxes” και στα αρχεία βοήθειας του προγράμματος MATLAB. Το βασικό παράθυρο εντός του οποίου δίνονται όλες οι εντολές και εμφανίζονται τα αποτελέσματα είναι το “Command Window”. Το σημείο εισαγωγής των εντολών είναι μετά το σύμβολο “>>”, το οποίο ονομάζεται “prompt”. Στο παράθυρο “Command History” καταγράφεται το σύνολο των στοιχείων που πληκτρολόγησε ο χρήστης στο “Command Window” με χρονική σειρά. Στο τρίτο παράθυρο περιλαμβάνονται τρεις καρτέλες:
1. “Current Directory Browser” που παρέχει την εύκολη πλοήγηση στους φακέλους του υπολογιστή μας. Εναλλακτικά, μπορούμε να χρησιμοποιήσουμε τη συντόμευση αυτού που βρίσκεται κάτω από το μενού των επιλογών.
2. “Workspace” όπου καταγράφονται όλες οι μεταβλητές που δημιουργήθηκαν κατά τη χρήση του προγράμματος και ορίστηκαν στο “Command Window”.
3. “Launch pad” που παρέχει την πρόσβαση σε εργαλειοθήκες, demos και συνοδευτικές οδηγίες χρήσης του προγράμματος MATLAB, λειτουργίες που επιτυγχάνονται και μέσω του “Start button”.
Το μενού επιλογών προσφέρει την εύκολη πρόσβαση σε πλήθος εντολών οι οποίες μπορούν επίσης να εκφραστούν μέσα από το “Command Window” με κατάλληλο ορισμό. Παρακάτω παρατίθεται μία σύντομη αναφορά στις κυριότερες εντολές του μενού επιλογών πέραν αυτών που εύκολα κανείς μπορεί να αναγνωρίσει.
Το μενού “File” περιλαμβάνει εντολές για τη δημιουργία νέων αρχείων, άνοιγμα ήδη υπαρχόντων αρχείων, αποθήκευση και έξοδο από το πρόγραμμα. Η επιλογή “New” στο συγκεκριμένο μενού εμφανίζει τέσσερις επιπλέον επιλογές:
1. “M-File”: Ανοίγει έναν επεξεργαστή κειμένου, “Editor”, όπου δομείται από το χρήστη ο κώδικας για ένα πρόγραμμα που έπειτα μπορεί να αποθηκευτεί ως “anyname.m”. Η επέκταση του αρχείου, “.m”, δηλώνει ότι πρόκειται για αρχείο του προγράμματος MATLAB. Αντί του επεξεργαστή κειμένου που προτείνει το πρόγραμμα MATLAB μπορεί να χρησιμοποιηθεί οποιοσδήποτε άλλος επεξεργαστής κειμένου όπως το “Word” ή το “Wordpad” μέσω της εντολής “Preferences” εντός του M-File.
2. “Figure”: Εμφανίζει το παράθυρο όπου παρουσιάζονται οι γραφικές παραστάσεις του προγράμματος MATLAB.

500 Δυναμική Ανάλυση των Συστημάτων 3. “Model”: Εμφανίζει το παράθυρο δημιουργίας νέων μοντέλων στο πακέτο “Simulink
toolbox”.
4. “GUI–Graphic User Interface”: Εμφανίζει τον οδηγό δημιουργίας νέου γραφικού περιβάλλοντος για την παρουσίαση μιας εργασίας.
Γ.1.3 Επιτρεπτοί Χαρακτήρες κατά τον Προγραμματισμό σε MATLAB
Η γλώσσα που χρησιμοποιεί το πρόγραμμα MATLAB, (κώδικας), γράφεται μόνο με χαρακτήρες τους οποίους αναγνωρίζει το πρόγραμμα. Οι επιτρεπτοί χαρακτήρες για τη σύνταξη όλων των εντολών είναι οι: α) λατινικοί χαρακτήρες, β) αριθμητικοί χαρακτήρες και γ) αριθμητικοί τελεστές και παραθέτονται στους Πίνακες Γ.1, Γ.2, Γ.3 και Γ.4.
Πίνακας Γ.1: Λογικοί τελεστές
Τελεστής Λειτουργία
& & Λογικό ‘και’
| | Λογικό ‘ή’
& Λογικό ‘και’ για πίνακες γραμμή
| Λογικό ‘ή’ για πίνακες γραμμή
~ Λογικό ‘όχι’
Πίνακας Γ.2: Τελεστές σύγκρισης
Τελεστής Λειτουργία
> Μεγαλύτερο από
> = Μεγαλύτερο ή ίσο από
< Μικρότερο από
< = Μικρότερο ή ίσο από
= = Ίσο με
~ = Όχι ίσο με

Εισαγωγή στο MATLAB 501
Πίνακας Γ.3: Ειδικοί χαρακτήρες
Χαρακτήρας Λειτουργία
[ ] Δηλώνουν την αρχή και το τέλος ενός πίνακα.
( ) Γενικά, δηλώνουν προτεραιότητα στις πράξεις. Επιπλέον, χρησιμοποιούνται για να περιλάβουν ορίσματα συναρτήσεων καθώς και για να δηλώσουν συγκεκριμένο στοιχείο πίνακα (για παράδειγμα το στοιχείο Α(o,p) αποτελεί το στοιχείο της “o” σειράς και “p” στήλης ενός πίνακα A (mxn) με (m>o, n>p).
Χρησιμοποιούνται όπως και οι αγκύλες [ ], αλλά για τη δημιουργία υποπινάκων που αναγνωρίζονται από το πρόγραμμα ως αυτόνομα στοιχεία άλλου πίνακα. Αντίστροφα, χρησιμοποιούνται όπως οι παρενθέσεις για τη δήλωση του στοιχείου υποπίνακα και την εμφάνισή του.
= Εντολή αντικατάστασης. Η παράσταση Α=Β δεν παρουσιάζει μία ισότητα αλλά μία αντικατάσταση όπου η μεταβλητή Α λαμβάνει την τιμή της μεταβλητής Β (μπορεί να είναι αριθμητική έκφραση ή μεταβλητή ή και αλφαριθμητικοί χαρακτήρες εντός εισαγωγικών).
: Γενικά αποτελεί την εντολή ‘από/έως’. Για παράδειγμα Α:Β σημαίνει τη σειρά με στοιχεία : Α, Α+1, Α+2,…,B.
. Δηλώνει την υποδιαστολή στους δεκαδικούς αριθμούς.
… Ορίζει την συνέχεια της γραμμής στην επόμενη. Το πρόγραμμα διαβάζει τις δύο εγγραφές σαν να βρίσκονταν στην ίδια σειρά.
,
Διαχωρίζει τα στοιχεία της ίδιας γραμμής ενός πίνακα και τα ορίσματα των συναρτήσεων. Όταν γράφεται μεταξύ δύο εντολών στην ίδια γραμμή έχει την ίδια ιδιότητα να εκτελείται και η δεύτερη εντολή σαν να βρίσκεται σε ξεχωριστή γραμμή.
; Δηλώνει την επόμενη γραμμή σε πίνακα. Όταν γράφεται μετά το τέλος κάποιας εντολής αποτρέπει την εμφάνιση αποτελέσματος στο ‘command window’.
% Δηλώνει την έναρξη σχολίου. Οτιδήποτε γράφεται μετά από ‘%’ δεν λαμβάνεται υπ΄ όψιν από το πρόγραμμα.
! Οτιδήποτε γράφεται μετά από θαυμαστικό αναγνωρίζεται ως εντολή προς το λειτουργικό σύστημα.

502 Δυναμική Ανάλυση των Συστημάτων
Πίνακας Γ.4: Αριθμητικοί τελεστές
Τελεστής Λειτουργία Παράδειγμα
+ Πρόσθεση: Οι προσθετέοι πρέπει να έχουν τις ίδιες διαστάσεις, αν πρόκειται για πίνακες, με εξαίρεση την πρόσθεση πίνακα (1x1) με πίνακα (mxn), οπότε το στοιχείο του πρώτου πίνακα προστίθεται σε όλα τα στοιχεία του δευτέρου.
>> Α+Β
– Αφαίρεση >> Α–Β
* Πολλαπλασιασμός: Στους πίνακες αφορά το εσωτερικό γινόμενο και ο αριθμός των στηλών του πρώτου όρου του γινομένου πρέπει να είναι ίδιος με τον αριθμό των στηλών του δευτέρου με εξαίρεση τους πίνακες (1x1) που πολλαπλασιάζονται με οποιονδήποτε πίνακα.
>> Α*Β
\ Αριστερή διαίρεση >> Α\Β
.\ Αριστερή διαίρεση στοιχείο προς στοιχείο: Οι πίνακες πρέπει να έχουν ίδιες διαστάσεις με εξαίρεση τον πίνακα στοιχείο (1x1).
>> Α./Β
/ Δεξιά διαίρεση >> Α/Β
./ Δεξιά διαίρεση στοιχείο προς στοιχείο >> Α./Β
^ Δύναμη >> Α^Β
.^ Δύναμη στοιχείο προς στοιχείο >> Α.^Β
‘ Ανάστροφος πίνακας: Αν υπάρχουν μιγαδικοί αριθμοί ως στοιχεία του πίνακα μετατρέπονται στους συζυγείς τους.
Α‘
.‘ Ανάστροφος πίνακας: Οι μιγαδικοί αριθμοί παραμένουν ως έχουν.
Α.‘
Γ.1.4 Ορισμός Μαθηματικών Συναρτήσεων
Το πρόγραμμα MATLAB περιέχει μία βιβλιοθήκη με τις συναρτήσεις που χρησιμοποιούνται συχνότερα. Οι συναρτήσεις αυτές δεν είναι τίποτε άλλο από έτοιμα υποπρογράμματα, (ρουτίνες), οι οποίες απαιτούν κάποια ορίσματα για να υπολογίσουν το αποτελέσμα. Όμοια υποπρογράμματα μπορεί να εισάγει και ο χρήστης στη βιβλιοθήκη

Εισαγωγή στο MATLAB 503 του προγράμματος MATLAB μέσω των “m-files”, (βλέπε Κεφάλαιο Γ.5). Ο ορισμός των κυριότερων μαθηματικών συναρτήσεων του προγράμματος MATLAB φαίνεται στον ακόλουθο Πίνακα Γ.5.
Πίνακας Γ.5: Μαθηματικές συναρτήσεις
Εντολή Λειτουργία
sin(A) Ημίτονο. Το A εκφράζεται σε rad.
cos(A) Συνημίτονο
tan(A) Εφαπτομένη
asin(A) Τόξο ημιτόνου
acos(A) Τόξο συνημιτόνου
atan(A) Τόξο εφαπτομένης
sinh(A) Υπερβολικό ημίτονο
cosh(A) Υπερβολικό συνημίτονο
tanh(A) Υπερβολική εφαπτομένη
asinh(A) Υπερβολικό τόξο ημιτόνου
acosh(A) Υπερβολικό τόξο συνημιτόνου
atanh(A) Υπερβολικό τόξο εφαπτομένης
exp(A) Δύναμη με βάση το e
log(A) Νεπέριος λογάριθμος
log10(A) Δεκαδικός λογάριθμος
abs(A) Απόλυτη τιμή
sqrt(A) Τετραγωνική ρίζα
gcd(A,B) Μέγιστος κοινός διαιρέτης
lcm(A,B) Ελάχιστο κοινό πολλαπλάσιο
erf(A) Συνάρτηση λάθους
rand Εμφανίζει τυχαίο αριθμό στο διάστημα (0,1)

504 Δυναμική Ανάλυση των Συστημάτων Γ.1.5 Χρήσιμες Πληροφορίες κατά την Εφαρμογή του Προγράμματος MATLAB
Στο πρόγραμμα MATLAB τα κεφαλαία και τα μικρά γράμματα αναγνωρίζονται ως διαφορετικοί χαρακτήρες (case sensitive), είτε πρόκειται για ονόματα μεταβλητών, είτε για αναγραφή εντολών. Έτσι, η μεταβλητή “A” είναι διαφορετική από τη μεταβλητή “a” και η εντολή “format” εκτελείται, σε αντίθεση με την εντολή “Format” η οποία δεν αναγνωρίζεται και το πρόγραμμα εμφανίζει μήνυμα σφάλματος.
Οι ελληνικοί χαρακτήρες δεν είναι αποδεκτοί από το πρόγραμμα για το χαρακτηρισμό μεταβλητών ή την αναγραφή εντολών. Γενικά, οτιδήποτε αφορά στο πρόγραμμα πρέπει να είναι γραμμένο με λατινικούς χαρακτήρες. Εξαίρεση αποτελεί ό,τι βρίσκεται μεταξύ εισαγωγικών: ‘’....’’ ή μετά από το σύμβολο: %. Στην περίπτωση αυτή το πρόγραμμα αναγνωρίζει κείμενο ή σχόλιο, αντίστοιχα, και όχι κάποια εκτελέσιμη εντολή.
Ο αριθμός των κενών διαστημάτων δεν επηρεάζει καθόλου το πρόγραμμα, το οποίο αναγνωρίζει κάθε συστοιχία κενών διαστημάτων ως ένα και μόνο κενό διάστημα.
Οι μεταβλητές μπορούν να ονομαστούν με τη σύνθεση οποιονδήποτε γραμμάτων και αριθμών προς σχηματισμό μιας λέξης, χωρίς τη χρήση κενού διαστήματος. Ονόματα μεταβλητών που αποτελούνται μόνο από αριθμούς δεν θεωρούνται μεταβλητές από το πρόγραμμα, το οποίο στην περίπτωση αυτή εμφανίζει μήνυμα σφάλματος.
Όταν εισάγουμε μια αριθμητική παράσταση στο “Command Window” χωρίς να τη δηλώσουμε σαν μεταβλητή, τότε το πρόγραμμα αυτόματα ονομάζει τη μεταβλητή αυτή “ans”:
Η μεταβλητή ans πρόκειται να αλλάξει τιμή και να χαθεί η υπάρχουσα πληροφορία σε περίπτωση εισαγωγής νέας αριθμητικής παράστασης, δηλαδή,

Εισαγωγή στο MATLAB 505
Τόσο στο “Command Window”, όσο και στα “M-files” οι εντολές διαβάζονται και εκτελούνται από το πρόγραμμα γραμμικά. Συνεπώς, αν σε κάποιο σημείο του κώδικα εμφανίζεται μια εντολή που περιέχει τη μεταβλητή Α χωρίς όμως η μεταβλητή αυτή να έχει λάβει κάποια τιμή μέχρι το συγκεκριμένο σημείο του κώδικα, τότε το πρόγραμμα θα εμφανίσει μήνυμα σφάλματος, ακόμη και στην περίπτωση που ορίζουμε την τιμή της μεταβλητής Α σε μετέπειτα σημείο.
Το MATLAB παρέχει ένα πλήρες αρχείο βοήθειας στο οποίο ο χρήστης μπορεί να ανατρέξει και να βρει πληροφορίες για τη σύνταξη των διαφόρων εντολών και βοηθητικά παραδείγματα για την κατανόησή τους. Οι σημειώσεις αυτές αποτελούν ένα έναυσμα για τη χρήση του MATLAB και σε καμία περίπτωση δεν αποτελούν έναν πλήρη οδηγό του προγράμματος.
Γ.2 Πίνακες
Γ.2.1 Εισαγωγή στους Πίνακες
Ο κάθε ορισμός στο πρόγραμμα MATLAB εκφράζεται ως πίνακας. Δηλαδή, ακόμα και οι πραγματικοί αριθμοί αναγνωρίζονται από το πρόγραμμα ως πίνακες (1x1). Η ουσιαστική διαφορά του προγράμματος MATLAB από τις υπόλοιπες γλώσσες προγραμματισμού είναι το γεγονός ότι δεν προαπαιτείται δήλωση των διαστάσεων του πίνακα, τις οποίες υπολογίζει το πρόγραμμα αυτόματα. Η εισαγωγή ενός πίνακα στο πρόγραμμα MATLAB γίνεται με τη βοήθεια του συμβόλου: [ ] όπου το πρόγραμμα αναγνωρίζει ως πίνακα

506 Δυναμική Ανάλυση των Συστημάτων ο,τιδήποτε περιέχεται μεταξ΄τ των αγκυλών. Τα στοιχεία μιας γραμμής του πίνακα διαχωρίζονται μεταξύ τους με κενά (δεν έχει σημασία ο αριθμός των κενών) ή με κόμμα (,). Τα στοιχεία της επόμενης γραμμής του πίνακα εισάγονται είτε μετά από το ελληνικό ερωτηματικό (;), είτε στην επόμενη γραμμή πατώντας το πλήκτρο “enter”. Άλλωστε, έως να κλείσουν οι αγκύλες για το πρόγραμμα εκκρεμεί η εισαγωγή του πίνακα. Τα στοιχεία του πίνακα μπορεί να είναι αριθμοί, μεταβλητές (που ήδη έχουν λάβει κάποια τιμή), μαθηματικές εκφράσεις ή αλφαριθμητικές σταθερές (γράμματα, αριθμοί ή σύμβολα) που περιέχονται μεταξύ εισαγωγικών (‘ ’).
Για παράδειγμα, ο πίνακας 1 2 3
A 4 5 67 8 9
⎡ ⎤⎢ ⎥= ⎢ ⎥⎢ ⎥⎣ ⎦
εισάγεται στο MATLAB ως εξής:
ή

Εισαγωγή στο MATLAB 507 Όπως παρατηρούμε και στις δύο περιπτώσεις μετά το κλείσιμο της αγκύλης και το πάτημα του πλήκτρου “enter” το πρόγραμμα απαντά με το ίδιο αποτέλεσμα, επιβεβαιώνοντας ότι η μεταβλητή Α έχει αποθηκευτεί στη βάση δεδομένων του. Για να αναζητήσουμε το στοιχείο του πίνακα Α που βρίσκεται στη γραμμή “o” και στήλη “p” πληκτολογούμε: Α(o,p). Για παράδειγμα,
Επίσης, μπορούμε να αντικαταστήσουμε ένα ή περισσότερα στοιχεία του πίνακα πληκτρολογώντας το στοιχείο που θέλουμε να αντικαταστήσουμε και τη νέα τιμή που θέλουμε να λάβει.
Στο παράδειγμα που φαίνεται στη συνέχεια αντικαθηστούμε το στοιχείο Α(1,3) του πίνακα το οποίο έχει την τιμή 3, με την τιμή 9. Όπως μπορούμε να παρατηρήσουμε τα υπόλοιπα στοιχεία του πίνακα Α παραμένουν ως είχαν.

508 Δυναμική Ανάλυση των Συστημάτων
Πίνακας Γ.6: Χρήσιμες εντολές για υπολογισμούς μεταξύ πινάκων
Τελεστής Λειτουργία
inv(A) Υπολογίζεται ο αντίστροφος πίνακας του Α, εφόσον αυτός είναι τετραγωνικός,. Εναλλακτικά, ο πίνακας υψωμένος στον εκθέτη (-1) δίνει επίσης τον αντίστροφο πίνακα. Παράδειγμα:
eig(A) Υπολογίζονται οι ιδιοτιμές του πίνακα Α. Παράδειγμα:
det(A) Υπολογίζεται η ορίζουσα του τετραγωνικού πίνακα Α. Παράδειγμα:

Εισαγωγή στο MATLAB 509 Πίνακας Γ.6 (συνέχεια):
Τελεστής Λειτουργία
length(A) Το πρόγραμμα δίνει το μέγιστο αριθμό γραμμών ή στηλών του πίνακα Α. Παράδειγμα:
size(A) Δίνονται οι διαστάσεις του πίνακα Α. Παράδειγμα:
trace(A) Υπολογίζεται το ίχνος του πίνακα, δηλαδή το άθροισμα των στοιχείων της κύριας διαγωνίου του. Ουσιαστικά, η εντολή αποτελεί συνδυασμό των εντολών ‘sum(A)’ και ‘diag(A)’ ως: trace(A)=sum(diag(A)). Παράδειγμα:

510 Δυναμική Ανάλυση των Συστημάτων Πίνακας Γ.6 (συνέχεια):
Τελεστής Λειτουργία
eye(m,n) Παράγει τον ταυτοτικό πίνακα (mxn). Παράδειγμα:
ones(m,n) Παράγεται πίνακας (mxn) του οποίου όλα τα στοιχεία είναι ίσα με τη μονάδα. Παράδειγμα:
zeros(m,n) Παράγεται πίνακας mxn του οποίου όλα τα στοιχεία είναι μηδενικά. Παράδειγμα:
clear A Διαγράφει τον πίνακα Α από το “Workspace”.
Γ.2.2. Πίνακες και Μιγαδικοί Αριθμοί
Όπως ήδη έχει αναφερθεί στο Κεφάλαιο Γ.1, οι μιγαδικοί αριθμοί αναγνωρίζονται από το πρόγραμμα MATLAB ως εξής:

Εισαγωγή στο MATLAB 511
ή
Στον Πίνακα Γ.7 δίνονται συγκεντρωτικά οι εντολές που αφορούν στη διαχείριση μιγαδικών αριθμών.
Πίνακας Γ.7: Χρήσιμες εντολές για μιγαδικούς αριθμούς
Εντολή Λειτουργία
conj(A) Υπολογίζεται ο συζυγής μιγαδικός του Α.
real(A) Υπολογίζεται το πραγματικό μέρος του Α.
imag(A) Υπολογίζεται το φανταστικό μέρος του Α.
abs(A) Υπολογίζει το μέτρο του μιγαδικού αριθμού Α.
angle(A) Υπολογίζει το όρισμα του μιγαδικού Α.
Γ.3 Πολυωνυμικές Παραστάσεις
Γ.3.1 Ορισμός Πολυωνύμου
Ένας πίνακας γραμμή n_στοιχείων (διάνυσμα), όπως ακριβώς ορίστηκε στην προηγούμενη ενότητα εκφράζει επίσης μία πολυωνυμική παράσταση της μορφής:
n 1 n 2 2n 1 n 2 2 1 oA X A X ... A X A X A− −− −+ + + + + . Πιο συγκεκριμένα, ένας πίνακας γραμμή
(1xn) αναπαριστά μία πολυωνυμική παράσταση όπου τα στοιχεία του πίνακα αποτελούν τις σταθερές ενός πολυωνύμου βαθμού (n-1) κατά φθίνουσα σειρά. Για παράδειγμα, η
πολυωνυμική παράσταση, 4 3 2 1P1 1X 2X 3X 4X 5= + + + + , δηλώνεται στο πρόγρραμμα MATLAB ως εξής:

512 Δυναμική Ανάλυση των Συστημάτων
Ενώ η πολυωνυμική παράσταση, 4 1P2 3X 2X 1= + + , ορίζεται ως εξής:
Γ.3.2 Ρίζες του Πολυωνύμου
Οι ρίζες των πολυωνύμων υπολογίζονται με τη βοήθεια του προγράμματος MATLAB με την εντολή ‘roots’. Οι ρίζες του πολυωνύμου P1, για παράδειγμα, υπολογίζονται ως εξής:
Εναλλακτικά, η εντολή θα μπορούσε να οριστεί και ως εξής:

Εισαγωγή στο MATLAB 513 Γ.3.3 Ανάκτηση Πολυωνύμου από τις Ρίζες του
Για την περίπτωση που γνωρίζουμε όλες τις n_ρίζες ενός πολυωνύμου n_βαθμού, το πρόγραμμα MATLAB παρέχει τη δυνατότητα αυτόματου υπολογισμού των συντελεστών του πολυωνύμου μέσω της εντολής ‘poly’. Οι εντολές ‘roots’ και ‘poly’ αποτελούν ένα ζεύγος εντολών με ακριβώς αντίστροφη λειτουργία. Για παράδειγμα,
Επίσης, με βάση την εντολή ‘poly’ μπορούμε να υπολογίσουμε το χαρακτηριστικό πολυώνυμο ενός πίνακα, για παράδειγμα:
Γ.3.4 Πολλαπλασιασμός Πολυωνύμων
Ο πολλαπλασιασμός δύο πολυωνυμικών παραστάσεων γίνεται με την εντολή ‘conv’. Για
παράδειγμα, το γινόμενο των πολυωνύμων, 2 1P1 1X 2X 3= + + και 2 1P2 4X 5X 6= + + , υπολογίζεται ως εξής:

514 Δυναμική Ανάλυση των Συστημάτων
δηλαδή, προκύπτει η πολυωνυμική παράσταση, 4 3 2 1P3 4X 13X 28X 27X 18= + + + + .
Γ.3.5 Διαίρεση Πολυωνύμων
Η διαίρεση μεταξύ δύο πολυωνύμων γίνεται με την εντολή ‘deconv’, η οποία υπολογίζει το πηλίκο και το υπόλοιπο της διαίρεσης. Η διαίρεση του πολυωνύμου P1 από το P2 ορίζεται ως εξής:
Στο σημείο αυτό θα πρέπει να σημειώσουμε ότι Q είναι το πηλίκο της διαίρεσης, ενώ η πολυωνυμική παράσταση, R 0,75X 1,5= + , είναι το υπόλοιπο της διαίρεσης.

Εισαγωγή στο MATLAB 515 Γ.3.6 Υπολογισμός των Τιμών του Πολυωνύμου
Η τιμή του πολυωνύμου P συναρτήσει του Χ, για Χ = Τ, υπολογίζεται με την εντολή ‘polyval(P,T)’. Η μεταβλητή Τ είναι δυνατό να είναι ένα διάνυσμα, οπότε η συγκεκριμένη εντολή δίνει τιμές στο πολυώνυμο για μία σειρά τιμών του X τις οποίες καταχωρεί σε διάνυσμα ίδιων διαστάσεων με τη μεταβλητή T. Για παράδειγμα, η τιμή του πολυωνύμου,
2 2P 3X 2X 1= + + , για X = 0, 1, 2, 3, 4 και 5 υπολογίζεται ως εξής:
Γ.3.7 Παράγωγος και Ολοκλήρωμα Πολυωνύμου
Η παράγωγος μιας πολυωνυμικής παράστασης P υπολογίζεται με την εντολή ‘polyder(P)’, ενώ το ολοκλήρωμα αυτής με την εντολή ‘polyint(P,C)’. Στην περίπτωση αυτή το πρόγραμμα απαντά με ένα διάνυσμα που περιλαμβάνει τους συντελεστές του πολυωνύμου της παραγώγου ή του ολοκληρώματος, αντίστοιχα. Στον ορισμό της εντολής ‘polyint(P,C)’, όπου C είναι η σταθερά ολοκλήρωσης. Αν C = 0, η εντολή μπορεί να γραφεί και ως ‘polyint(P)’.
Γ.3.8 Πολυωνυμική Προσομοίωση και Παρεμβολή
Η πολυωνυμική προσομοίωση μιας καμπύλης στο πρόγραμμα MATLAB επιτυγχάνεται με την εντολή ‘polyfit’. Αν δίνεται ένα διάνυσμα Y το οποίο αντιστοιχεί στις τιμές ενός διανύσματος X, η καμπύλη μπορεί να προσομοιώθει με ένα πολυώνυμο N_βαθμού μέσω της εντολής ‘polyfit(X, Y, N)’, οπότε το πρόγραμμα απαντά με ένα (1x(Ν+1)) διάνυσμα που περιλαμβάνει τους συντελεστές του πολυωνύμου. Από τη στιγμή που είναι γνωστή η σχέση μεταξύ X και Y είναι πολύ εύκολο να γίνει παρεμβολή με εφαρμογή της εντολής ‘polyval’.

516 Δυναμική Ανάλυση των Συστημάτων Στον Πίνακα Γ.8 δίνονται συγκεντρωτικά οι εντολές που αναφέρονται σε πράξεις μεταξύ πολυωνύμων.
Πίνακας Γ.8: Χρήσιμες εντολές για πολυώνυμα
Εντολή Λειτουργία
roots Υπολογίζει τις ρίζες του πολυωνύμου.
poly Υπολογίζει το πολυώνυμο ν_οστού βαθμού αν είναι γνωστές οι ν ρίζες. Εναλλακτικά, υπολογίζει τo χαρακτηριστικό πολυώνυμο ί
conv Πολλαπλασιασμός πολυωνύμων.
deconv Διαίρεση πολυωνύμων.
polyval Υπολογίζει τις τιμές του πολυωνύμου για ορισμένες τιμές της ανεξάρτητης μεταβλητής.
polyder Παράγωγος πολυωνύμου.
polyint Ολοκλήρωμα πολυωνύμου.
polyfit Πολυωνυμική προσομοίωση.
Γ.4 Γραφικές Παραστάσεις
Το πρόγραμμα MATLAB παρέχει στο χρήστη τη δυνατότητα παρουσίασης των δεδομένων/ αποτελεσμάτων μέσα από ένα πλούσιο πακέτο γραφικών παραστάσεων που περιλαμβάνουν μεταξύ άλλων δισδιάστατες και τρισδιάστατες απεικονίσεις, πολικά διαγράμματα, ιστογράμματα και ραβδογράμματα. Το πακέτο των γραφικών παραστάσεων συμπληρώνεται από ένα πλήθος άλλων μορφών οπτικοποίησης δεδομένων τα οποία ο χρήστης μπορεί να βρει στο αρχείο βοήθειας του προγράμματος MATLAB.
Παρακάτω γίνεται μία σύντομη αναφορά στις εντολές που χρησιμοποιούνται για το σχεδιασμό ενός διαγράμματος σε δύο διαστάσεις, καθώς επίσης και σε κάποιες παραμέτρους που σχετίζονται με την απεικόνιση των γραφημάτων και μπορούν να μεταβληθούν ανάλογα με τις επιθυμίες του χρήστη. Παράλληλα περιγράφεται με λεπτομέρεια η διαδικασία σχεδίασης μιας γραφικής παράστασης σε δύο διαστάσεις. Συνεπώς, ο χρήστης μπορεί στη συνέχεια να περάσει στο σχεδιασμό με τη βοήθεια του προγράμματος MATLAB και άλλων ειδών διαγραμμάτων, τα οποία σε γενικές γραμμές ακολουθούν τη λογική σχεδιασμού δισδιάστατων γραφημάτων.

Εισαγωγή στο MATLAB 517 Γ.4.1 Δισδιάστατες Γραφικές Παραστάσεις
Γενικά, αν έχουμε Ν ζεύγη τιμών (x,y) τα οποία είναι καταχωρημένα σε δύο διανύσματα x και y διαστάσεων (1xΝ) και επιθυμούμε το σχεδιασμό της γραφικής παράστασης αυτών στο ορθοκανονικό σύστημα αξόνων, τότε ο πιο απλός τρόπος για να παραστήσουμε γραφικά τα δεδομένα μας μέσω του προγράμματος MATLAB είναι με εφαρμογή της εντολής ‘plot(x,y)’. Η γραφική παράσταση που προκύπτει μετά την εισαγωγή της εντολής εμφανίζεται σε ξεχωριστό παράθυρο και αποτελείται από (Ν-1) ευθύγραμμα τμήματα, ενώνοντας τα Ν σημεία μεταξύ τους. Το μενού επιλογών του παραθύρου πέραν των γνωστών εντολών των “Windows-based” μενού περιλαμβάνει εντολές για τη μορφοποίηση της γραφικής παράστασης, όπως για παράδειγμα προσθήκη τίτλων, επικεφαλίδων, κειμένου και μεταβολή του είδους της καμπύλης.
Στα διαγράμματα που περιλαμβάνονται περισσότερες από μία καμπύλες έχει ιδιαίτερη σημασία το είδος και το χρώμα της κάθε καμπύλης (για παράδειγμα συνεχής ή διακεκομμένη) καθώς και η μορφή των σημείων που αυτή περιλαμβάνει. Στη γενική περίπτωση, οι τρεις παραπάνω παράμετροι ρυθμίζονται μέσω της εντολής ‘plot’ σύμφωνα με τη σύνταξη: ‘plot(x, y, ‘είδος γραμμής σύμβολο σημείου χρώμα’)’, όπου οι τρεις παράμετροι μπορούν να τοποθετηθούν με οποιαδήποτε σειρά ή ακόμη και να παραληφθεί κάποια από αυτές, οπότε ρυθμίζεται αυτομάτως από το πρόγραμμα MATLAB.
Το είδος της γραμμής, το χρώμα της και η μπρφή των συμβόλων που αυτή θα περιλαμβάνει ορίζονται μέσα από προκαθορισμένες επιλογές του προγράμματος και δίνονται στους ακόλουθους Πίνακες Γ.9, Γ.10 και Γ.11.
Ο τίτλος στο διάγραμμα εισάγεται με την εντολή ‘title(‘κείμενο’)’, ενώ οι επικεφαλίδες των αξόνων x και y με τις εντολές ‘xlabel(‘κείμενο’)’ και ‘ylabel(‘κείμενο’)’, αντίστοιχα.
Πίνακας Γ.9: Είδος γραμμής σχεδιασμού της γραφικής παράστασης
Σύμβολο Είδος γραμμής που εμφανίζεται στο διάγραμμα
- Συνεχής γραμμή.
-- Διακεκομμένη γραμμή.
: Γραμμή αποτελούμενη από τελείες.
-. Διακεκομμένη γραμμή με τελείες.
Πίνακας Γ.10: Σύμβολα σημείων καμπύλης

518 Δυναμική Ανάλυση των Συστημάτων
Σύμβολο Είδος συμβόλου που εμφανίζεται στο διάγραμμα
+ Σταυρός
ο Κύκλος
* Αστερίσκος
. Τελεία
x Μικρά x
s Μικρά τετράγωνα
d Ρόμβοι
^ Τρίγωνα με κορυφή προς τα επάνω
v Τρίγωνα με κορυφή προς τα κάτω
< Τρίγωνα με κορυφή προς τα αριστερά
> Τρίγωνα με κορυφή προς τα δεξιά
p Αστερίσκος με πέντε κορυφές
h Αστερίσκος με έξι κορυφές
Πίνακας Γ.11: Χρώμα γραμμής
Σύμβολο Χρώμα γραμμής που εμφανίζεται στο διάγραμμα
r Κόκκινο
g Πράσινο
b Μπλε
c Γαλάζιο
m Μωβ
y Κίτρινο
k Μαύρο
w Άσπρο
Πίνακας Γ.12: Χρήσιμες εντολές για τη σχεδιάση ενός διαγράμματος

Εισαγωγή στο MATLAB 519
Εντολή Λειτουργία
plot(x,y) Σχεδιασμός δισδιάστατης γραφικής παράστασης.
semilogx(x,y) Σχεδιασμός δισδιάστατης γραφικής παράστασης με λογαριθμική κλίμακα στον άξονα x.
semilogy(x,y) Σχεδιασμός δισδιάστατης γραφικής παράστασης με λογαριθμική κλίμακα στον άξονα y.
loglog(x,y) Σχεδιασμός σε λογαριθμική κλίμακα των αξόνων x και y.
polar(theta,rho) Σχεδιασμός πολικών διαγραμμάτων.
plot3x,y,z) Σχεδιασμός τρισδιάστατων διαγραμμάτων.
subplot(m,n,k) Χωρισμός του γραφικού παραθύρου σε (mxn) τμήματα και τοποθέτηση της γραφικής παράστασης που ακολουθεί στη θέση k.
ezplot(f,[min,max]) Σχεδιασμός της έκφρασης f=f(x) στην περιοχή min<x<max.
ezpolar(f,[a,b]) Σχεδιασμός της έκφρασης rho=f(theta) στην περιοχή a<theta<b.
figure(n) Το διάγραμμα που ακολουθεί τοποθετείται στο n_γραφικό παράθυρο.
linspace(a,b,n) Δημιουργία διανύσματος (1xn) που περιλαμβάνει n σημεία γραμμικά κατανεμημένα μεταξύ του a και του b.
logspace(a,b,n) Δημιουργία διανύσματος (1xn) που περιλαμβάνει n σημεία λογαριθμικά κατανεμημένα μεταξύ του 10a και του 10b. Αν το n παραληφθεί, τίθεται αυτομάτως ίσο με 50.
title(‘κείμενο’) Εισαγωγή τίτλου.
xlabel(‘κείμενο’) Εισαγωγή επικεφαλίδας άξονα x.
ylabel(‘κείμενο’) Εισαγωγή επικεφαλίδας άξονα y.
zlabel(‘κείμενο’) Εισαγωγή επικεφαλίδας άξονα z.
text(x,y, ‘κείμενο’) Εισαγωγή κειμένου στο σημείο (x,y) της γραφικής παράστασης.
legend(‘κείμενο 1’, …,‘κείμενο N’, n)
Εισαγωγή υπομνήματος.
axis([xmin xmax ymin ymax])
Επιλογή κλίμακας.
grid Εισαγωγή πλέγματος.

520 Δυναμική Ανάλυση των Συστημάτων Γ.5 Προγραμματισμός
Γ.5.1 Εισαγωγή στη Γλώσσα Προγραμματισμού MATLAB
Γενικά, ως προγραμματισμός εννοείται η εκτέλεση ενός αλγορίθμου από μία γλώσσα προγραμματισμού. Αλγόριθμος είναι μία ακολουθία σαφώς διατυπωμένων εντολών που ως σκοπό έχουν την επίλυση κάποιου προβλήματος. Το πρόγραμμα MATLAB έχει τη δυνατότητα είτε να εκτελεί άμεσα εντολές μετά την εισαγωγή τους στο “Command Window”, είτε να εκτελεί ακολουθίες εντολών καταγεγραμμένες σε αρχεία κειμένου, γνωστά ως “M-files”. Αν και η ακολουθία των εντολών του προγράμματος είναι δυνατόν να γραφεί σε οποιονδήποτε κειμενογράφο, το πρόγραμμα MATLAB περιλαμβάνει ένα δικό του επεξεργαστή κειμένου κατάλληλο για τη σύνταξη του αντίστοιχου κώδικα.
Όπως ήδη έχουμε αναφέρει, για τη δημιουργία ενός νέου “M-file” επιλέγουμε από το μενού επιλογών: File/ New/ M-file, οπότε και εμφανίζεται το παράθυρο του επεξεργαστή κειμένου. Εναλλακτικά, μπορούμε να επιλέξουμε την αντίστοιχη συντόμευση που βρίσκεται κάτω από το μενού επιλογών. Τα “M-files” είναι δυνατόν είτε να περιλαμβάνουν μία ακολουθία εντολών οι οποίες δομούν έναν κώδικα επίλυσης ενός προβλήματος, είτε να περιγράφουν μία συνάρτηση η οποία μετέπειτα χρησιμοποιείται από το πρόγραμμα MATLAB όπως ακριβώς οι συναρτήσεις που περιλαμβάνονται στη βιβλιοθήκη του προγράμματος, (για τις συναρτήσεις γίνεται λόγος στο τέλος του Kεφαλαίου 5). Αν υπάρχουν συντακτικά λάθη στη δομή του κώδικα, τότε το πρόγραμμα εκτελείται έως το σημείο που εμφανίζεται το πρώτο από αυτά και σταματάει με ταυτόχρονη εμφάνιση μηνύματος σφάλματος στο “Command Window” και αναφορά στην αντίστοιχη γραμμή του κώδικα.
Γ.5.2 Δομές Ελέγχου
Ως δομές ελέγχου χαρακτηρίζονται οι ακολουθίες εντολών σύμφωνα με τις οποίες ο αλγόριθμος αποκτά πολύπλοκη δομή με διακλαδώσεις και επαναλήψεις, παύοντας πλέον να εκτελείται γραμμικά. Οι δομές ελέγχου και επαναλήψεων που βρίσκουν εφαρμογή στο πρόγραμμα MATLAB παραθέτονται στους Πίνακες Γ.13 και Γ.14 που ακολουθούν.
Σύμφωνα με τον Πίνακα Γ.13 παρατηρούμε ότι κάθε εντολή ‘if’ συνοδεύεται από την εντολή ‘end’ η οποία ορίζει το τέλος της διακλάδωσης. Επιπλέον, οι εντολές ‘else’ και ‘elseif’ μπορούν να συμπεριληφθούν στο βρόγχο της εντολής ‘if’ χωρίς να απαιτείται εκ νέου δήλωση του τέλους της διακλάδωσης. Πιο συγκεκριμένα στην περίπτωση που επιθυμούμε να ικανοποιούνται περισσότερες από δύο συνθήκες χρησιμοποιούμε την εντολή ‘elseif’, με την τελευταία από τις οποίες να ορίζεται ως ‘else’. Κατά τη σύνταξη

Εισαγωγή στο MATLAB 521 μίας διακλάδωσης υπό συνθήκη το πρόγραμμα MATLAB μορφοποιεί αυτόματα την εγγραφή όπως παρουσιάζεται στην τρίτη στήλη του Πίνακα Γ.13.
Πίνακας Γ.13: Διακλάδωση υπό συνθήκη
α/α Ψευδοκώδικας Κώδικας MATLAB Παράδειγμα
1. Αν ισχύει η Συνθήκη εκτέλεσε την Εντολή. Τέλος της διακλάδωσης.
if Συνθήκη Εντολή end
if A>0 B=1 end
2. Αν ισχύει η Συνθήκη 1 εκτέλεσε την Εντολή 1, αλλιώς εκτέλεσε την Εντολή 2. Τέλος της διακλάδωσης.
if Συνθήκη 1 Εντολή 1 else Εντολή 2 end
if A>0 B=1 else B=2 end
3. Αν ισχύει η Συνθήκη 1 εκτέλεσε την Εντολή 1, αλλιώς αν ισχύει η Συνθήκη 2 εκτέλεσε την Εντολή 2, αλλιώς αν ισχύει η Συνθήκη 3 εκτέλεσε την Εντολή 3, αλλιώς εκτέλεσε την Εντολή 4.
Τέλος της διακλάδωσης.
if Συνθήκη 1 Εντολή 1 elseif Συνθήκη 2 Εντολή 2 elseif Συνθήκη 3 Εντολή 3 else Εντολή 4 end
if A+B<=0 C=1 elseif A+B>0 & A+B<=1 C=2 elseif A+B>1 & A+B<=2 C=3 else C=4 end
Όσον αφορά στις δομές επαναλήψεων, Πίνακας Γ.14, παρατηρούμε ότι στην πρώτη περίπτωση με τη χρήση της εντολής ‘for’ ο αριθμός των επαναλήψεων είναι πεπερασμένος, σε αντίθεση με τη δεύτερη όπου η χρήση της εντολής ‘while’ συνεπάγεται και απεριόριστο αριθμό επαναλήψεων, αρκεί να ικανοποιείται η υπόθεση. Ο ορισμός του τέλους του βρόγχου είναι απαραίτητος και στις δύο περιπτώσεις και δηλώνεται με την εντολή ‘end’. Αρκετές φορές λόγω λανθασμένης διατύπωσης της υπόθεσης στον βρόγχο της εντολής ‘while’ η επανάληψη συμβαίνει επ’ άπειρο, δηλαδή, το πρόγραμμα “τρέχει” εκτελώντας τις εντολές εντός του βρόχου και η λειτουργία του διακόπτεται μόνο αν γεμίσει η διαθέσιμη μνήμη του υπολογιστή. Σε αυτήν την περίπτωση ο βρόγχος των απείρων επαναλήψεων διακόπτεται από το χρήστη με την ταυτόχρονη πληκτρολόγηση των ‘Ctrl+C’, (συνδυασμός πλήκτρων που διακόπτουν τη λειτουργία του προγράμματος).

522 Δυναμική Ανάλυση των Συστημάτων Στον Πίνακα Γ.15 δίνεται η σύνταξη των εντολών που αναφέρονται σε διακλαδώσεις με διακριτές περιπτώσεις. Ο έλεγχος των περιπτώσεων γίνεται γραμμικά και εκτελείται μόνο η εντολή της πρώτης υπόθεσης η οποία επαληθεύεται, ενώ οι υπόλοιπες υποθέσεις αγνοούνται. Αν καμία τιμή δεν επαληθεύει την παράσταση το πρόγραμμα συνεχίζει να εκτελείται προσπερνώντας τη διακλάδωση.
Πίνακας Γ.14: Δομές επαναλήψεων ή βρόγχοι
α/α Ψευδοκώδικας Κώδικας MATLAB Παράδειγμα
1. Για κάποιες τιμές επανέλαβε την Εντολή. Τέλος του βρόγχου.
for κάποιες τιμές Εντολή end
for k=1:10 A(k)=2*k end
2. Όσο ισχύει η Υπόθεση επανέλαβε την Εντολή. Τέλος του βρόγχου.
while Υπόθεση Εντολή end
A=2 while A<10 A= A*1.5 end
Στο σημείο αυτό αξίζει να σημειώσουμε ότι χρησιμοποιούνται οι τελεστές σύγκρισης και οι λογικοί τελεστές οι οποίοι αναφέρθηκαν στο Κεφάλαιο Γ.1 για το σύνολο των δομών ελέγχου, για την διατύπωση των συνθηκών καθώς και το συνδυασμό τους.
Πίνακας Γ.15: Διακλάδωση με διακριτές περιπτώσεις
α/α Ψευδοκώδικας Κώδικας MATLAB Παράδειγμα
1. Αν η Παράσταση λάβει την Τιμή 1 εκτέλεσε την Εντολή 1, αν λάβει την Τιμή 2 εκτέλεσε την Εντολή 2. Τέλος της διακλάδωσης.
switch Παράσταση case Τιμή 1 Εντολή 1 case Τιμή 2 Εντολή 2 end
switch A+B case 10 k=0 case 20 k=1 end
2. Αν η Παράσταση λάβει την Τιμή 1 εκτέλεσε την Εντολή 1, αν λάβει την Τιμή 2 εκτέλεσε την Εντολή 2. Αλλιώς εκτέλεσε την Εντολή 3. Τέλος της διακλάδωσης.
switch Παράσταση case Τιμή 1 Εντολή 1 case Τιμή 2 Εντολή 2 otherwise Εντολή 3 end
switch A+B case 10 k=0 case 20 k=1 otherwise k=2 end

Εισαγωγή στο MATLAB 523 Γ.6 Κανονικές Διαφορικές Εξισώσεις
Η βιβλιοθήκη του προγράμματος MATLAB περιλαμβάνει διάφορους επιλυτές κανονικών διαφορικών εξισώσεων πρώτης τάξης και συστήματα αυτών. Με αυτούς τους επιλυτές ωστόσο, μπορούν να λυθούν και διαφορικές εξισώσεις ανώτερης τάξης δεδομένου ότι μια κανονική διαφορική εξίσωση n-τάξης μπορεί να εκφραστεί ως ένα σύστημα n κανονικών διαφορικών εξισώσεων πρώτης τάξης. Οι επιλυτές που χρησιμοποιούνται από το πρόγραμμα MATLAB για μη άκαμπτα προβλήματα είναι οι: ‘ode45’, ‘ode23’ και ‘ode113’, ενώ για άκαμπτα οι ‘ode15s’, ‘ode23s’, ‘ode23t’ και ‘ode23tb’.
Γ.6.1 Σύνταξη και Εφαρμογή των Επιλυτών
Για να χρησιμοποιηθεί ένας επιλυτής στο πρόγραμμα MATLAB θα πρέπει πρώτα να δημιουργηθεί ένα αρχείο το οποίο θα περιγράφει τη διαφορική εξίσωση ή το σύστημα των διαφορικών εξισώσεων που πρόκειτε να επιλυθούν. Στη συνέχεια δίνεται ένα παράδειγμα επίλυσης του συστήματος των διαφορικών εξισώσεων που περιγράφουν τη λειτουργία ενός συνεχούς αντιδραστήρα πλήρους ανάμιξης (CSTR).
Θεωρούμε έναν αντιδραστήρα συνεχούς λειτουργίας και πλήρους ανάμιξης στον οποίο λαμβάνει χώρα μία χημική αντίδραση πρώτης τάξης, A B→ . Οι σχεδιαστικές εξισώσεις που περιγράφουν τη δυναμική κατάσταση λειτουργίας του αντιδραστήρα είναι οι εξής:
A inA
dC QC Qk Cdt V V
⎛ ⎞ ⎛ ⎞= − +⎜ ⎟⎜ ⎟⎝ ⎠⎝ ⎠
BA B
dC QkC Cdt V
= −
όπου V: είναι ο όγκος του αντιδραστήρα, Q: είναι η ογκομετρική παροχή εισόδου και εξόδου, Cin: είναι η συγκέντρωση της τροφοδοσίας του αντιδρώντος συστατικού Α και k: είναι η σταθερά της ταχύτητας της αντίδρασης, την οποία και θεωρούμε σταθερή.
Για την περιγραφή του συστήματος των διαφορικών εξισώσεων που πρόκειται να επιλυθεί δημιουργείται ένα αρχείο, “M-file”, το οποίο ονομάζουμε “DiffC.m” και δίνεται παρακάτω. Στην τρίτη σειρά του κώδικα ορίζουμε τη συνάρτηση που θα επιλυθεί και μέσα στην παρένθεση πρέπει να φαίνεται πρώτα η ανεξάρτητη μεταβλητή t, στη συνέχεια ο πίνακας των εξαρτημένων μεταβλητών C (η πρώτη στήλη του πίνακα C αντιπροσωπεύει την πρώτη εξαρτημένη μεταβλητή CA, η δεύτερη στήλη τη δεύτερη μεταβλητή CB, κλπ.) και τέλος όλες οι παράμετροι που εμφανίζονται στις διαφορικές εξισώσεις, δηλαδή k, Q, V και Cin. Το αρχείο “DiffC.m” πρέπει να βρίσκεται σε φάκελο του υπολογιστή ο οποίος

524 Δυναμική Ανάλυση των Συστημάτων θα είναι ορατός από το πρόγραμμα MATLAB. Στη συνέχεια, σε ένα δεύτερο αρχείο ή στο παράθυρο εντολών θα πρέπει να δοθούν τιμές σε όλες τις παραμέτρους/ μεταβλητές του προβλήματος. Συνεπώς, θα πρέπει αρχικά να ορίσουμε τις παραμέτρους k, Q, V, και Cin και στη συνέχεια το διάστημα ολοκλήρωσης της ανεξάρτητης μεταβλητής t καθώς και τις αρχικές συνθήκες του προβλήματος. Τέλος, με εφαρμογή ενός από τους επιλυτές που αναφέρθηκαν παραπάνω το πρόγραμμα μπορεί να επιλύσει το σύστημα των διαφορικών εξισώσεων.
Θεωρούμε τις τιμές των παραμέτρων: 3Q 1 m hr= , 3V 1 m= , 3inC 1 mol m= και
1k 5 hr−= στο διάστημα από t 0= έως t 2 hr= , με βήμα εμφάνισης τιμών ίσο με 0,01 hr
και με αρχικές συνθήκες ( ) 3AC t 0 1 mol m= = και ( )BC t 0 0= = . Τα δεδομένα αυτά
εισάγονται στο πρόγραμμα σύμφωνα με τη διατύπωση της επόμενης σελίδας.
Γενικά, η σύνταξη όλων των επιλυτών στο πρόγραμμα MATLAB είναι σύμφωνα με το παραπάνω παράδειγμα. Αναλυτικότερα, πριν το ίσον και μέσα σε αγκύλες εισάγεται πρώτα η θέση στην οποία αποθηκεύεται η ανεξάρτητη μεταβλητή και στη συνέχεια η θέση στην οποία αποθηκεύονται οι εξαρτημένες μεταβλητές, δηλαδή, ο πίνακας C θα έχει τόσες στήλες όσες είναι και οι εξαρτημένες μεταβλητές του προβλήματος. Επίσης, μετά το ίσον ακολουθεί το όνομα του επιλυτή που θα χρησιμοποιήσουμε για να λύσουμε το σύστημα των εξισώσεων και μέσα σε παρένθεση δίνονται τα ορίσματα. Αρχικά, δίνεται το όνομα της συνάρτησης όπου ορίζουμε το σύστημα των διαφορικών εξισώσεων που πρόκειται να επιλυθούν, (αρχείο “DiffC.m”), και ακολουθούν το χρονικό διάστημα ολοκλήρωσης και οι αρχικές συνθήκες, οι οποίες εφαρμόζονται στο κάτω άκρο του διαστήματος ολοκλήρωσης. Τέλος, μετά το διάνυσμα των αρχικών συνθηκών στην 15η γραμμή του κώδικα της

Εισαγωγή στο MATLAB 525
παραπάνω εφαρμογής φαίνονται οι αγκύλες [] με κενό το εσωτερικό τους. Η συγκεκριμένη διατυπωση αφορά στον ορισμό των ιδιοτήτων του επιλυτή, που στην προκειμένη περίπτωση το κενό μεταξύ των αγκυλών συνεπάγεται τις εξ’ ορισμού ιδιότητες.
Στο σημείο αυτό αξίζει να αναφέρουμε ότι το διάστημα ολοκλήρωσης μπορεί να οριστεί με δύο διαφορετικούς τρόπους. Με τον πρώτο τρόπο (όπως στο παράδειγμα) το διάστημα ορίζεται ως ένα πλήθος τιμών κατά αύξουσα σειρά και ο επιλυτής εξάγει τα αποτελέσματα στα συγκεκριμένα σημεία που ορίζονται από τις τιμές αυτές. Σύμφωνα με το δεύτερο τρόπο εισάγουμε μόνο το κάτω και το πάνω όριο ολοκλήρωσης, δηλαδή ‘span = [tin tfin]’ και έτσι ο επιλυτής εξάγει τα αποτελέσματα σε κάθε βήμα ολοκλήρωσης. Το βήμα της ολοκλήρωσης δεν επηρεάζεται σε καμία περίπτωση από τα σημεία όπου ζητάμε τη λύση και καθορίζεται αυτόματα από τον επιλυτή.
Οι ιδιότητες όλων των επιλυτών μπορούν να αναζητηθούν στο μενού “Help” του προγράμματος MATLAB. Οι απλούστερες από αυτές είναι η σχετική και η απόλυτη ακρίβεια επίλυσης, οι οποίες λαμβάνουν εξ’ ορισμού τιμές ίσες με 10-3 και 10-6, αντίστοιχα. Εάν για παράδειγμα είναι επιθυμητό να αυξηθεί η ακρίβεια της μεθόδου σε 10-
4 και 10-7, αντίστοιχα, τότε θα πρέπει πριν την κλήση του επιλυτή να εισαχθούν οι νέες

526 Δυναμική Ανάλυση των Συστημάτων τιμές των ιδιοτήτων σύμφωνα με τη σύνταξη: ‘options = odeset('RelTol', 1e-4,'AbsTol',1e-7);’ και στη συνέχεια στα ορίσματα του επιλυτή οι κενές αγκύλες [] αντικαθίστανται με την εντολή ‘options’. Επίσης, μια άλλη χρήσιμη ιδιότητα των επιλυτών που σχετίζεται με τα στατιστικά στοιχεία των υπολογισμών, όπως είναι για παράδειγμα ο αριθμός των βημάτων ολοκλήρωσης, μπορεί να εξαχθεί με την εξής σύνταξη: ‘options = odeset('Stats','on');’. Τέλος, με απλή σύνταξη της εντολής ‘options’ χωρίς ορίσματα, μετά τη σύνταξη του επιλυτή εμφανίζεται στο χώρο εργασίας η κατάσταση όλων των ιδιοτήτων του συστήματος. Για ιδιότητες οι οποίες δεν καθορίζονται από τον χρήστη αλλά αφήνονται οι εξ’ ορισμού τιμές τους εμφανίζεται ένα ζεύγος κενών αγκυλών.
Η γραφική απεικόνιση των αποτελεσμάτων της παραπάνω εφαρμογής δίνεται στην Εικόνα Γ.2 που ακολουθεί.
Εικόνα Γ.2: Γραφική παράσταση της λύσης του συστήματος των διαφορικών εξισώσεων.

Εισαγωγή στο MATLAB 527 Γ.7 Μετασχηματισμοί
Ο υπολογισμός των μετασχηματισμών Laplace στο πρόγραμμα MATLAB γίνεται με τη βοήθεια της Εργαλειοθήκης Συμβολικών Μαθηματικών – Symbolic Math Toolbox, η οποία περιέχει εντολές που σχετίζονται με τους μετασχηματισμούς. Το κύριο στοιχείο της παραπάνω εργαλειοθήκης είναι η ικανότητα της να διαχειρίζεται και να εκτελεί πράξεις με συμβολικές μεταβλητές ή αντικείμενα (symbolic object).
Εντολή: ‘sym/ syms’:
x = sym('x') ή x = sym('x','real') ή x = sym('x','unreal')
Χρησιμοποιείται για τη δημιουργία συμβολικών μεταβλητών και εκφράσεων. Με την παραπάνω σύνταξη επιτυγχάνεται η δημιουργία της συμβολικής μεταβλητής με το όνομα ‘x’ και η αποθήκευση της στη θέση x. Επιπλέον, μπορεί να καθοριστεί ο τύπος της μεταβλητής (πραγματική ή μη) στο τρίτο όρισμα.
syms arg1 arg2 ... ή syms arg1 arg2 ... real ή syms arg1 arg2 ... unreal
Με την εντολή syms επιτυγχάνεται η σύντομη δημιουργία πλήθους συμβολικών μεταβλητών, οι οποίες αποθηκεύονται στη θέση arg1, arg2, … . Κάθε μεταβλητή πρέπει να ξεκινά με κάποιο γράμμα και να περιέχει μόνο αλφαριθμητικούς χαρακτήρες.
Εντολή: ‘laplace’:
laplace(F)
Η εντολή αυτή παρέχει τη δυνατότητα υπολογισμού του μετασχηματισμού Laplace της παράστασης F. Η εξ’ ορισμού ανεξάρτητη μεταβλητή της συνάρτησης F είναι η μεταβλητή t, ενώ η μεταβλητή του αποτελέσματος είναι η s.
Εντολή: ‘ilaplace’:
ilaplace(L)
Η εντολή αυτή παρέχει τη δυνατότητα υπολογισμού του αντίστροφου μετασχηματισμού Laplace της παράστασης L. Σε αυτήν την περίπτωση η εξ’ ορισμού ανεξάρτητη μεταβλητή της παράστασης L είναι η s και του αποτελέσματος η μεταβλητή t.

528 Δυναμική Ανάλυση των Συστημάτων Η Εργαλειοθήκη περιλαμβάνει επίσης εντολές για μετασχηματισμούς Fourier και z, καθώς και τους αντιστρόφους αυτών. Η σύνταξη τους είναι όμοια με τις δύο παραπάνω εντολές των μετασχηματισμών Laplace.
Ανάλογα με τον τύπο κάθε προβλήματος είναι επιθυμητό τα αποτελέσματα να δίνονται με διαφορετικό τρόπο ή μορφή. Για το σκοπό αυτό η Εργαλειοθήκη περιλαμβάνει εντολές οι οποίες αναπαριστούν με διαφορετικό τρόπο μια παράσταση. Στη συνέχεια δίνεται η λειτουργία ορισμένων από αυτές.
Εντολή: ‘collect’:
R = collect(S) ή R = collect(S,v)
Με εφαρμογή αυτής της εντολής μετατρέπουμε την πολυωνυμική παράσταση S σε μια παράσταση R, όπου έχουν ομαδοποιηθεί οι όροι της ίδιας δύναμης της μεταβλητής v κατά φθίνουσα σειρά (ή της μεταβλητής x αν δεν οριστεί η v).
Εντολή: ‘expand’:
R = expand(S)
Με την εντολή αυτή μετατρέπουμε την παράσταση S σε γινόμενο των παραγόντων της και αναπτύσσονται τριγωνομετρικές, εκθετικές και λογαριθμικές συναρτήσεις με βάση τις ιδιότητες τους.
Αυτές ήταν μερικές από τις περισσότερο εύχρηστες εντολές της Εργαλειοθήκης Συμβολικών Μαθηματικών του προγράμματος MATLAB. Ο χρήστης μπορεί να αναζητήσει περισσότερες πληροφορίες σχετικά με τις εντολές της Εργαλειοθήκης στο αρχείο βοήθειας του προγράμματος.
Παράδειγμα Γ.1: Υπολογισμός του αντίστροφου μετασχηματισμού Laplace
Να υπολογιστεί ο αντίστροφος μετασχηματισμός Laplace της συνάρτησης:
( ) 2
s 1Y ss 2s 5
+=
− +

Εισαγωγή στο MATLAB 529 Λύση:
Παράδειγμα Γ.2: Εφαρμογή της εντολής ‘collect’

530 Δυναμική Ανάλυση των Συστημάτων Παράδειγμα Γ.3: Εφαρμογή της εντολής ‘expand’