Micro robot and mechanism Lab. · Micro robot and mechanism Lab. ... Pick & Place. Sensing....
1
Micro robot and mechanism Lab. Assoc. Prof. Ohmi Fuchiwaki, Dept. of Mech. Engine. YNU Lab HP: http://www.fuchilab.ynu.ac.jp Keyword; mechanism, micro robotics, precise positioning, control, micro manipulation θ R (x, y) Precise mobile robots 9cm Precise tools <Capillary force gripper> 1mm Cube Cone Column <In-liquid manipulation> <Multi-axial tweezer> <Atomic force Microscope> [Wikipedia] Measuring & Control <XYθ nm-scale servo control> Micro actuators & mech. <SMA heat engine > Fix Nut Housing Coil spring SMA looped over pulleys Smaller gear A Pulley A Larger gear B Pulley B Fix High temp. SMA coil spring Low temp. <Helical µ-mixer & 3D bridge> <Soft gripper> µTAS & Soft mech. collaborated with Ota lab. Soldering Pick & Place Sensing Assemble Injection Flexible µ robot factory
Transcript of Micro robot and mechanism Lab. · Micro robot and mechanism Lab. ... Pick & Place. Sensing....
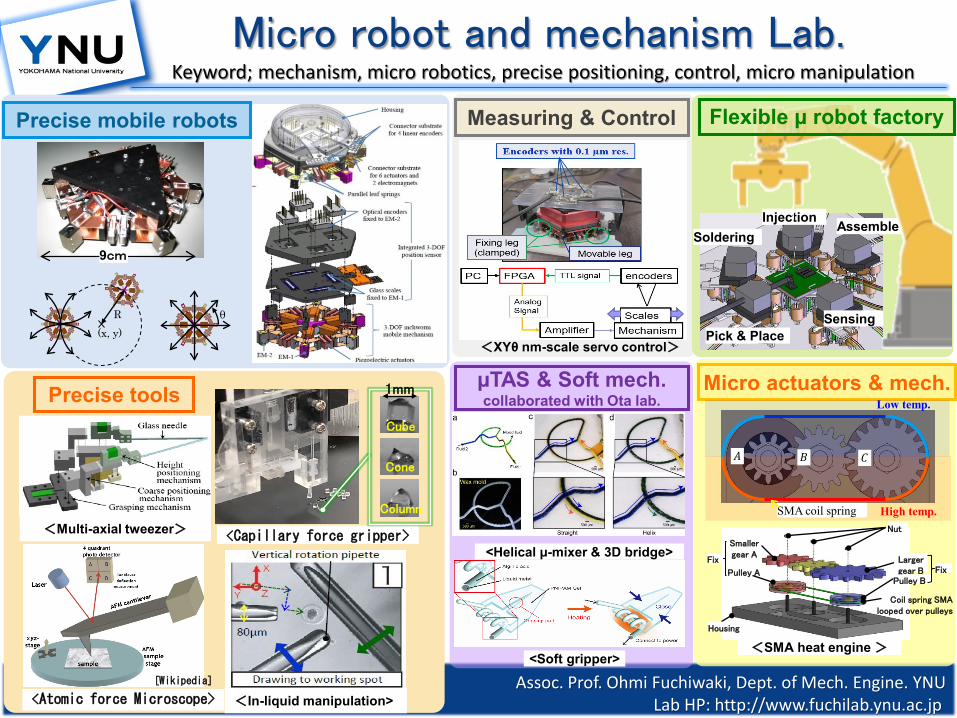
Micro robot and mechanism Lab.
Assoc. Prof. Ohmi Fuchiwaki, Dept. of Mech. Engine. YNULab HP: http://www.fuchilab.ynu.ac.jp
Keyword; mechanism, micro robotics, precise positioning, control, micro manipulation
θR(x, y)
Precise mobile robots
9cm
Precise tools
<Capillary force gripper>
1mm
Cube
Cone
Column
<In-liquid manipulation>
<Multi-axial tweezer>
<Atomic force Microscope>
[Wikipedia]
Measuring & Control
<XYθ nm-scale servo control>
Micro actuators & mech.
<SMA heat engine >
Fix
Nut
Housing
Coil spring SMAlooped over pulleys
Smaller gear A
Pulley A
Larger gear B
Pulley BFix
High temp.SMA coil spring
𝐴𝐴 𝐵𝐵 𝐶𝐶
Low temp.
<Helical µ-mixer & 3D bridge>
<Soft gripper>
µTAS & Soft mech.collaborated with Ota lab.
Soldering
Pick & PlaceSensing
AssembleInjection
Flexible µ robot factory