Graphical Models for Mobile Robot Localization
19
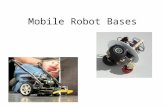
Graphical Models for Mobile Robot Localization Shuang Wu
description
Graphical Models for Mobile Robot Localization. Shuang Wu. Global Localization. In an occupancy map, estimate the pose of the robot X = . (0,0). occupied. free. θ. The inputs. Laser readings z t = {r 1 ,r 2 … r 180 } Odometer reading a t = {d,theta} - PowerPoint PPT Presentation
Transcript of Graphical Models for Mobile Robot Localization

Graphical Models for Mobile Robot Localization
Shuang Wu

Global Localization In an occupancy map, estimate the
pose of the robot X = <x,y,θ>
(0,0)
θ
occupied
free

The inputs Laser readings zt = {r1,r2…r180} Odometer reading at = {d,theta} Prior sample set, Bel(X0) = <Xi,wi>, n
possible pose

Could use Bayes Filter
)|()( ...0 ttt dXPXBel
1 1 0 1 0
1 0
( | , , ,... ) ( | , ,..., )( )
( | ,... )t t t t t t t
tt t
P z X a z z P X a z zBel X
P z a z
0.. 1 0( , ,..., )t t td a z z
1 0( ) ( | ) ( | , ,..., )t t t t t tBel X P z X P X a z z predictionupdate
1 1 1 1 0 1( ) ( | ) ( | , ) ( | , ... )t t t t t t t t t tBel X p z X p X X a p X a z z dX 1 1 1 1( ) ( | ) ( | , ) ( )t t t t t t t tBel X p z X p X X a Bel X dX

Recursive Bayes Filter
sensor model
action modelnormalizing constant
)(),|()|()( '11
'1
ntt
ntttt
nt XBelaXXPXzPCXBel

New Positions:Generate X’ according to P(X’|X,a)
<x,y,θ>todometer reading <x’,y’,θ’>t
+1
at = (1, 45˚) p(X’|X,a) ~ X’ + N(0,Σd) + N(0, Σθ)
)cos(*a x x’ )sin(*a y y’

Sensor model weight w’ by p(z|X’)
zt = (1, 1.41,…,3)
w,<x’,y’,θ’>t+1 p(z|X’)*w, <x’,y’,θ’>t+1
p(z|X’) = N(d,Σs), where Σs is the measure of noise in the laser readings d is the distance to the closest obstacle
p(z|X’) =
180
1
)'|(r
r Xzp

Sampling
Likelihood weighted sampling
Samples are drawn from the target distribution
Importance Sampling
Samples are drawn from a proposal distribution(g)
Re-weight samples to account for the difference between the proposal and target distribution
proposaltarget
Key: represent belief states by set of weighted samples
( )( )
( )
f xp x
g x
g 0, f 0

Resampling
Reason: Waste of CPU time if we keep propagating particles that have 0 weight.
Goal: Minimize variance of the importance weights

Rao-Blackwell Theorem Particle Filters approximate any distribution
independent of size of state space. The complexity of the standard PF algorithm is O(N).
Motivation: In very high-dimensional spaces, a large number of particles is needed to represent the posterior Solution: Reduce size of state space by marginalizing out some
of the variables.
]]|[[]|[[)( LRVarLRVarRVar ]]|[[)( LRVarRVar

Rao-Blackwellised
Step1. Divide the set of variables into sets R and L where R = set of sampled variables and L = remaining variables in the DBN at time t. Choice of RB variables: nodes that have no parents in the current
time slice or have parents that are already in R. Keep growing R until the remaining variables can be updated exactly.
Step2. Sample the set of variables Rt from Rt-1 using standard PF Step3. Compute the remain variables analytically.

RBPF Now the particle set is represented by
) , | ( ) , | ( ) , | (1 :1 1 :1 1 1 1 :1
1
: 1
it t t t
it t
X
it tz X P X X P z X P
t
t
),|(),|(),|( 1:11:1111:1
1
:1
itttt
itt
X
itt zYPYYPzYP
t
t
Prediction:
Update:
),|()|(),|( :11:1:1:1itttt
Yt
ittt zYPYzPzYP
),|()|(),|( :11:1:1:1itttt
Xt
ittt zXPXzPzXP
Proposal distribution:)|()|()|( 1:11:11:1:1 t
itttt
it zPPzq
),|()|(),|()|()|(),|( 1:11:11:11:1:11:1 ttttY
Yttttt
X
Xttttttt zYPYzPzXPXzPzPzzPw
tt
Importance weights
),|(),,|(, :1:1:1:1:1ittt
ittt
it zYPzXP

Implementation
Implementation Summary: • Used Rao-Blackwellised particle filtering to solve localization problem. • Able to localize within about 4cm (using a 20 x 20 x 10 resolution grid). • Implementation is written in Java. • Takes 16 seconds on my 2.4 GHz 512MB Windows XP machine for data set 1 (not counting loading data and ray tracing pre-computations). • Ray tracing takes 8 seconds, plus 14 seconds for pre-computing grid ranges.

Results(Implemented in Java)

Step 110

Step 565

Step 580

End of Forward Run

The End